飞思卡尔寄存器整理

S12的输入/输入端口(I/O口)
I/O端口功能
可设置为通用I/O口、驱动、内部上拉/下拉、中断输入等功能。
设置I/O口工作方式的寄存器有:
DDR、IO、RDR、PE、IE和PS。
DDR:设定I/O口的数据方向。
IO :设定输出电平的高低。
RDR:选择I/O口的驱动能力。
PE:选择上拉/下拉。
IE:允许或禁止端口中断。
PS:1、中断允许位置位时,选择上升沿/下降沿触发中断;2、中断禁止时且PE有效时,用于选择上拉还是下拉。
I/O端口设置
1、A口、B口、E口寄存器
(1)数据方向寄存器DDRA、DDRB、DDRE
DDRA、DDRB、DDRE均为8位寄存器,复位后其值均为0。
当DDRA=0、 DDRB=0、 DDRE=0 时A口、B口和E口均为输入口。
否则,A口、B口、E口为输出口。当DDRA、DDRB、DDRE的任何一位置1时,则该位对应的引脚被设置为输出。
例如,将A口设置为输出口,则其C语言程序的语句为:DDRA=0xff;
(2)A口、B口、E口上拉控制寄存器PUCR
PUCR为8位寄存器,复位后的值为0。当PUPAE、PUPBE、PUPEE被设置为1时,A口、B口、E口具有内部上拉功能;为0时,上拉无效。当A口、B 口、E口为地址/数据总线时,PUPAE和PUPBE无效。
(3)A口、B口、E口降功率驱动控制寄存器RDRIV
RDRIV为8位寄存器,复位后的值为0,此时,A口、B口、E口驱动保持全功率;当RDPA、RDPB、RDPE为1时, A口、B口、E口输出引脚的驱动功率下降
(4)数据寄存器PORTA、PORTB、PORTE
PORTA、PORTB、PORTE均为8位寄存器,复位后的值为0,端口引脚输出低电平;要使引脚输出高电平,相应端口对应位应该置1。
由于PE0是/XIRQ、PE1是IRQ,因此,PE0和PE1只能设置为输入。
2、H口寄存器
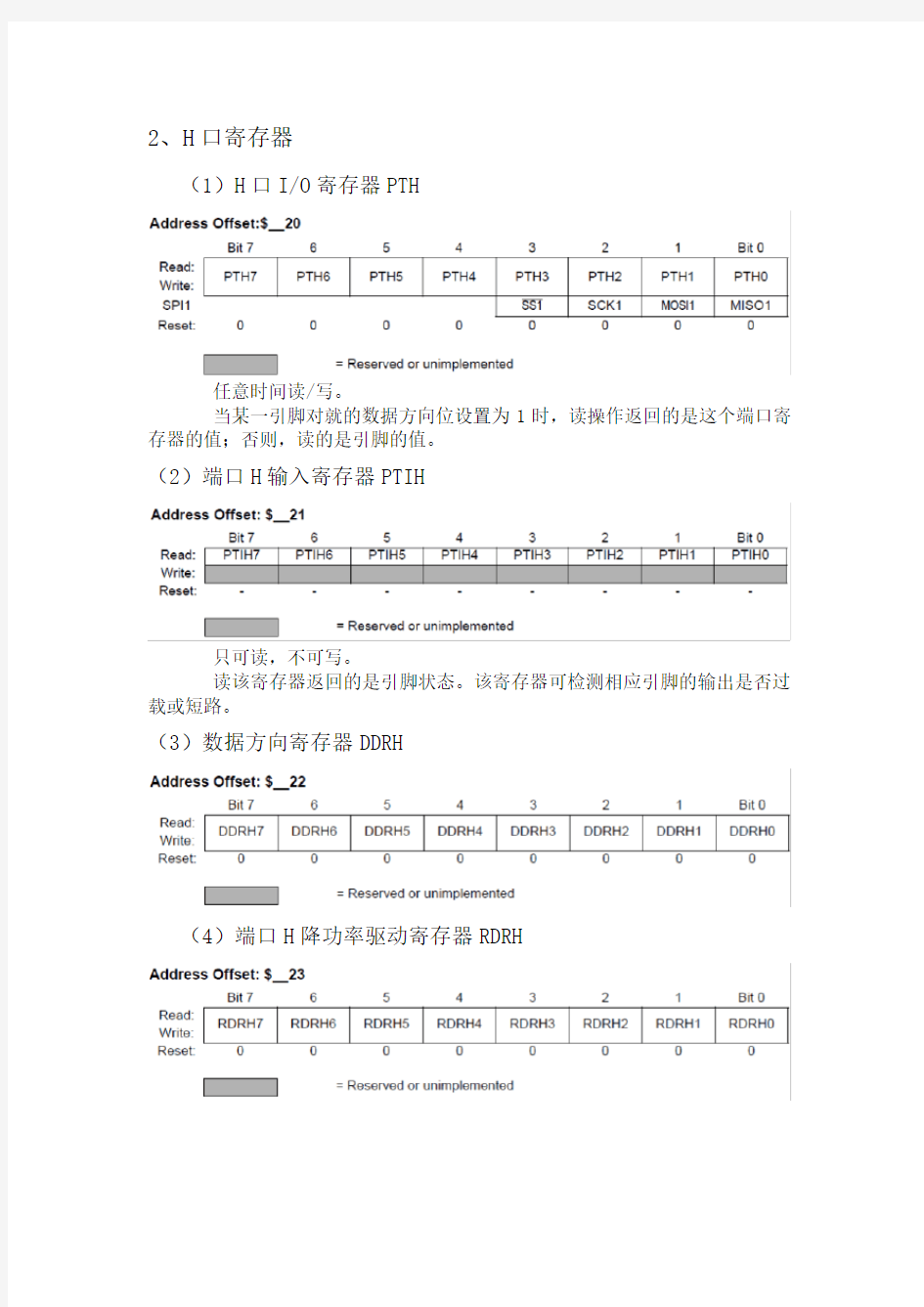
(1)H口I/O寄存器PTH
任意时间读/写。
当某一引脚对就的数据方向位设置为1时,读操作返回的是这个端口寄存器的值;否则,读的是引脚的值。
(2)端口H输入寄存器PTIH
只可读,不可写。
读该寄存器返回的是引脚状态。该寄存器可检测相应引脚的输出是否过载或短路。
(3)数据方向寄存器DDRH
(4)端口H降功率驱动寄存器RDRH
(5)端口H拉动装置使能寄存器PERH
任意时间读/写。
如果端口H是输入口,该寄存器将配置被激活的上拉或下拉装置。
当PERH某一位为1时,对应装备上拉或下拉使能。
当PERH某一位为0时,对应装备上拉或下拉禁止。
(6)端口H极性选择寄存器PPSH
任意时间读/写。
该寄存器有两个作用:选择激活的中断边沿的极性;选择上拉或下拉。
当PPSH某一位为1时,H口对应引脚信号上升沿将使PIFH寄存器中相应位置位;当PERH对应位置1且端口定义为输入口时,引脚和下拉装置连接。
当PPSH某一位为0时,H口对应引脚信号下降沿将使PIFH寄存器中相应位置位;当PERH对应位置1且端口定义为输入口时,引脚和上拉装置连接。
(7)H口中断使能寄存器PIEH
任意时间读/写。
PIEH寄存器可设置端口H相应引脚的外部中断边沿使能或禁止。
PIEH某一位置1时,对应引脚的中断使能。
PIEH某一位置0时,对应引脚的中断禁止。
(8)口中断标志寄存器PIFH
任意时间读/写。
当对应引脚出现活动的边沿时,PIFH相应位被置1。是上升沿或下降沿,由PPSH寄存器相应位的状态决定。
为了清除标志位,向PIFH对应位写“1”。写“0”无效。
3、J口寄存器
(1)J口I/O寄存器PTJ
任意时间读/写。
当数据方向寄存器对应位置1时,读PTJ将返回PTJ中的值;否则读返回对应引脚的值。
(2)J口输入寄存器PTIJ
只读不写。
读该寄存器将返回引脚的值。
该寄存器可检测相应引脚的输出是否过载或短路。
(3)J口数据方向寄存器DDRJ
(4)J口降功率驱动寄存器RDRJ
(5)J口拉动装备使能寄存器PERJ
(6)J口极性选择寄存器PPSJ
任意时间读/写。
该寄存器有两个作用:选择激活的中断边沿的极性;选择上拉或下拉。
当PPSJ某一位为1时,J口对应引脚信号上升沿将使PIFJ寄存器中相应位置位;当PERJ对应位置1且端口定义为输入口时,引脚和下拉装置连接。
当PPSJ某一位为0时,J口对应引脚信号下降沿将使PIFJ寄存器中相应位置位;当PERJ对应位置1且端口定义为输入口时,引脚和上拉装置连接。
(7)J口中断使能寄存器PIEJ
任意时间读/写。
PIEJ寄存器可设置端口J相应引脚的外部中断边沿使能或禁止。
PIEJ某一位置1时,对应引脚的中断使能。
PIEJ某一位置0时,对应引脚的中断禁止.
任意时间读/写。
当对应引脚出现活动的边沿时,PIFJ相应位被置1。是上升沿或下降沿,由PPSJ寄存器相应位的状态决定。
为了清除标志位,向PIFJ对应位写“1”。写“0”无效。
4、M口寄存器
(1)M口I/O寄存器PTM
任意时间读/写。
当数据方向寄存器对应位置1时,读PTM将返回PTM中的值;否则读PTM 将返回对应引脚的值。
(2)M口输入寄存器PTIM
只读不写。
读该寄存器将返回引脚的值。
该寄存器可检测相应引脚的输出是否过载或短路。
Byteflight/CAN/BDLC强制将与其输出对应的引脚置为输出状态;同时,将与其输入对应的引脚置为输入状态。
(4)M口降功率驱动寄存器RDRM
(5)M口拉动装备使能寄存器PERM
任意时间读/写。
如果端口用于输入或“线或”输出,该寄存器配置被激活的上拉或下拉装置。当端口用于推挽输出时,相应位无效。
(6)M口极性选择寄存器PPSM
任意时间读/写。
当PPSM的某一位被置为1时,如果PERM对应位使能,并且端口用于通用或BDLC输入,则一个下拉装备被连接到M口对应引脚上。
当PPSM的某一位被清0时,如果PERM对应位使能,并且端口用于通用、Byteflight或RXCAN输入,则一个上拉装备被连接到M口对应引脚上。
该寄存器配置输出引脚为线或。如果应用于Byteflight、CAN和BDLC 输出且许多几种串行模式的多点连接,则该寄存器的某一位对于用于输入的相应引脚无影响。
当WOMM某一位置为1时,输出缓冲器工作在开漏输出状态。
当WOMM某一位清为0时,输出缓冲器工作在推挽输出状态。
5、P口寄存器
(1)P口I/O寄存器PTP
任意时间读/写。
如果PWM通道使能,则PWM功能优先于通用I/O功能。如果相应通道使能,通道6~0只能输出;如果停机特性使能,则通道7可作为PWM输出与输入。
SPI功能也优先于通用I/O功能。
(2)P口输入寄存器PTIP
如果PWM对应通道或SPI模式使能,则该寄存器对引脚无效。
(4)P口降功率驱动寄存器RDRP
(5)P口拉动装置使能寄存器PERP
(6)P口极性选择寄存器PPSP
任意时间读/写。
该寄存器有两个作用:选择激活的中断边沿的极性;选择上拉或下拉。
当PPSP某一位为1时,P口对应引脚信号上升沿将使PIFP寄存器中相应位置位;当PERP对应位置1且端口定义为输入口时,引脚和下拉装置连接。
当PPSP某一位为0时,P口对应引脚信号下降沿将使PIFP寄存器中相应位置位;当PERP对应位置1且端口定义为输入口时,引脚和上拉装置连接。
任意时间读/写。
PIEP寄存器可设置端口P相应引脚的外部中断边沿使能或禁止。
PIEP某一位置1时,对应引脚的中断使能。
PIEP某一位置0时,对应引脚的中断禁止。
(8)P口中断标志寄存器PIFP
任意时间读/写。
当对应引脚出现活动的边沿时,PIFP相应位被置1。是上升沿或下降沿,由PPSP寄存器相应位的状态决定。
为了清除标志位,向PIFP对应位写“1”。写“0”无效。
6、S口寄存器
(1)S口I/O寄存器PTS
(2)S口输入寄存器PTIP
飞思卡尔锁相环
备战飞思卡尔智能车大赛.开始模块总结. 锁相环设置. 公式: PLLCLK=2*OSCCLK*(SYNR+1)/(REFDV+1), fbus=PLLCLK/2 void INIT_PLL(void) { CLKSEL &= 0x7f; //选用外部时钟.准备设置锁相环 PLLCTL &= 0x8F; //禁止锁相环 SYNR = 0xc9; //设置SYNR REFDV = 0x81; //设置REFDV PLLCTL |=0x70; //锁相环使能 asm NOP; asm NOP; //两个机器周期缓冲时间 while(!(CRGFLG&0x08)); //等待锁相环锁定 CLKSEL |= 0x80; //设置锁相环为时钟源 } 飞思卡尔XS128的PLL锁相环详细设置说明——关于如何提高总线工作频率PLL锁相环就相当于超频 单片机超频的原因和PC机是个一道理。分频的主要原因是外设需要的工作频率往往远低于CPU/MEMORY 这也和PC机南北桥的原理类似。总线频率设置过程 1、禁止总中断 2、寄存器CLKSEL(时钟选择寄存器)的第七位置0 即CLKSEL_PLLSEL=0。选择时钟源为外部晶振OSCCLK(外接晶振频率) 在PLL(锁相环)程序执行前 内部总线频率为OSCCLK/2 3. PLLCTL_PLLON=1 打开PLL 4.设置SYNR 时钟合成寄存器 、REFDV 时钟分频寄存器 、POSTDIV三个寄存器的参数 5、_asm(nop) _asm(nop);加入两条空指令 使锁相环稳定 6、while(!(CRGFLG_LOCK==1));//时钟校正同步 7、CLKSEL_PLLSEL=1; 下面详细说一下频率的计算一、时钟合成寄存器SYNR寄存器结构 VCOFRQ[1:0]控制压控振动器VCO的增益 默认值为00 VCO的频率与VCOFRQ[1:0]对应表
飞思卡尔智能车摄像头组freescale程序代码
extern int left,w,top,h; extern HDC m_hdc; CBrush brush3(RGB(0,255,0)); CBrush brush4(RGB(255,0,0)); CBrush brush5(RGB(255,255,0)); #else #include
飞思卡尔单片机LED控制例程详解
我的第一个LED程序 准备工作: 硬件:Freescale MC9S08JM60型单片机一块; 软件:集成开发环境codewarrior IDE; 开发板上有两个LED灯,如下图所示: 实验步骤: 1.首先,确保单片机集成开发环境及USBDM驱动正确安装。其中USBDM的安装步骤如下:?假设之前安装过单片机的集成开发环境6.3版本:CW_MCU_V6_3_SE; ?运行USBDM_4_7_0i_Win,这个程序会在c盘的程序文件夹下增加一个目录C:\Program Files\pgo\USBDM 4.7.0,在这个目录下: 1〉C:\ProgramFiles\pgo\USBDM 4.7.0\FlashImages\JMxx下的文件 USBDM_JMxxCLD_V4.sx是下载器的固件文件; 2〉C:\Program Files\pgo\USBDM 4.7.0\USBDM_Drivers\Drivers下有下载器的usb 驱动 所以在插入usb下载器,电脑提示发现新的usb硬件的时候,选择手动指定驱动 安装位置到以上目录即可。 ?运行USBDM_4_7_0i_Win之后,还会在目录: C:\Program Files\Freescale\CodeWarrior for Microcontrollers V6.3\prog\gdi 下增加一些文件,从修改时间上来看,增加了6个文件,这些文件是为了在codewarrior 集成开发环境下对usb下载器的调试、下载的支持。
2.新建一个工程,工程建立过程如下: ?运行单片机集成开发环境codewarrior IDE ?出现如下界面 ●Create New Project :创建一个新项目工程 ●Load Example Project :加载一个示例工程 ●Load Previous Project :加载以前创建过的工程 ●Run Getting started Tutorial:运行CodeWarrior软件帮助文档 ●Start Using CodeWarrior:立刻使用CodeWarrior ?点击Create New project按钮,以创建一个新的工程,出现选择CPU的界面 如下,请选择HCS08/HCS08JM Family/MC9S08JM60,在右边的Connection窗口
飞思卡尔智能车比赛细则
2016
目录
第十一届竞赛规则导读 参加过往届比赛的队员可以通过下面内容了解第十一届规则主要变化。如果第一次参加比赛,则建议对于本文进行全文阅读。 相对于前几届比赛规则,本届的规则主要变化包括有以下内容: 1.本届比赛新增了比赛组别,详细请参见正文中的图1和第四章的“比赛任务” 中的描述; 2.第十届电磁双车组对应今年的A1组:双车追逐组。其它组别与新组别的对应 关系请参见图2; 3.为了提高车模出界判罚的客观性,规则提出了两种方法:路肩法和感应铁丝 法,详细请见赛道边界判定”; 4.改变了原有的光电计时系统,所有赛题组均采用磁感应方法计时,详细请参 见“计时裁判系统”; 5.取消了第十届的发车灯塔控制的方式; 6.赛道元素进行了简化,详细请参见“赛道元素”; 7.赛道材质仍然为PVC耐磨塑胶地板,但赛题组A2不再需要赛道。 8.对于车模所使用的飞思卡尔公司MCU的种类、数量不再限制。 9.比赛时,每支参赛队伍的赛前准备时间仍然为20分钟,没有现场修车环节。
一、前言 智能车竞赛是从2006开始,由教育部高等教育司委托高等学校自动化类教学指导委员会举办的旨在加强学生实践、创新能力和培养团队精神的一项创意性科技竞赛。至今已经成功举办了十届。在继承和总结前十届比赛实践的基础上,竞赛组委会努力拓展新的竞赛内涵,设计新的竞赛内容,创造新的比赛模式,使得围绕该比赛所产生的竞赛生态环境得到进一步的发展。 为了实现竞赛的“立足培养、重在参与、鼓励探索、追求卓越”的指导思想,竞赛内容设置需要能够面向大学本科阶段的学生和教学内容,同时又能够兼顾当今时代科技发展的新趋势。 第十一届比赛的题目在沿用原来根据车模识别赛道传感器种类进行划分的基础类组别之上,同时增加了以竞赛内容进行划分的提高类组别,并按照“分赛区普及,全国总决赛提高”的方式,将其中一个类别拓展出创意类组别。第十一届比赛的题目各组别分别如下: ●基础类包括B1光电组、B2摄像头组、B3电磁直立组、B4电轨组; ●提高类包括A1双车追逐组、A2信标越野组; ●创意类包括I1 电轨节能组。 图 1 不同组别,不同挑战度 每个组别在选用的车模、赛道识别方法、完成任务等方面存在差别,对于参赛选手不同学科知识和能力要求也不同,制作的挑战度也有较大的区别。相比较而言,
飞思卡尔单片机编程
关于Codewarrior 中的 .prm 文件 网上广泛流传的一篇文章讲述的是8位飞思卡尔单片机的内存映射,这几天,研究了一下Codewarrior 5.0 prm文件,基于16位单片机MC9S12XS128,一点心得,和大家分享。有什么错误请指正。 正文: 关于Codewarrior 中的.prm 文件 要讨论单片机的地址映射,就必须要接触.prm文件,本篇的讨论基于Codewarrior 5.0 编译器,单片机采用MC9S12XS128。 通过项目模板建立的新项目中都有一个名字为“project.prm”的文件,位于Project Settings->Linker Files文件夹下。一个标准的基于XS128的.prm文件起始内容如下: .prm文件范例: NAMES END SEGMENTS RAM = READ_WRITE DATA_NEAR 0x2000 TO 0x3FFF;
READ_ONLY DATA_NEAR IBCC_NEAR 0x4000 TO 0x7FFF; ROM_C000 = READ_ONLY DATA_NEAR IBCC_NEAR 0xC000 TO 0xFEFF; //OSVECTORS = READ_ONLY 0xFF10 TO 0xFFFF; EEPROM_00 = READ_ONLY DATA_FAR IBCC_FAR 0x000800 TO 0x000BFF; EEPROM_01 = READ_ONLY DATA_FAR IBCC_FAR 0x010800 TO 0x010BFF; EEPROM_02 = READ_ONLY DATA_FAR IBCC_FAR 0x020800 TO 0x020BFF; EEPROM_03 = READ_ONLY DATA_FAR IBCC_FAR 0x030800 TO 0x030BFF; EEPROM_04 = READ_ONLY DATA_FAR IBCC_FAR 0x040800 TO 0x040BFF; EEPROM_05 = READ_ONLY DATA_FAR IBCC_FAR 0x050800 TO 0x050BFF; EEPROM_06 = READ_ONLY DATA_FAR IBCC_FAR 0x060800 TO 0x060BFF; EEPROM_07 = READ_ONLY DATA_FAR IBCC_FAR 0x070800 TO 0x070BFF; PAGE_F8 = READ_ONLY DATA_FAR IBCC_FAR 0xF88000 TO 0xF8BFFF;
飞思卡尔智能车竞赛新手入门建议
每年都会有很多新人怀着满腔热情来做智能车,但其中的很多人很快就被耗光了热情和耐心而放弃。很多新人都不知道如何入手,总有些有劲无处使的感觉,觉得自己什么都不会,却又不知道该干什么。新人中存在的主要问题我总结了以下几点: l缺乏自信,有畏难情绪 作为新人,一切都是新的。没有设计过电路,没有接触过单片机,几乎什么都不会。有些新人听了两次课,看了两篇技术报告,就发现无数不懂不会的东西,于是热情在消退,信心在减弱。这些都是放弃的前兆。殊不知,高手都是从新人过来的,没有谁天生什么都会做。一件事件,如果还没开始做,就自己否定自己,认为自己做不到,那么肯定是做不到的。 l习惯了被动接收知识,丧失了主动学习的能力。 现在的学生大多从小习惯了被灌输知识,只学老师教的,只学老师考的。殊不知一旦走向社会,将不再有老师来教,不再有应付不完的考试。做智能车和传统的教学不同,学生将从被动学习的地位转变为主动学习。就算有指导老师,有指导的学长,但也都处于被动地位,往往都不会主动来教。有的学生一开始就没有转变思想,还希望就像实验课一样,老师安排好步骤1,2,3……,然后自己按照老师安排好的步骤按部就班的完成。这样的学生,往往都丧失了提出问题和分析问题的能力,只是一个应付考试的机器。要知道,解决问题的第一步是提出问题,如果总等着别人来教,那么问题永远会挡在你面前。 l缺乏团队精神和合作意识 智能车比赛是以团队的形式参赛,只依靠个人能力单兵作战就能取得好成绩的是很少很少的。当今社会,任何人的成功都离不开身后的团队的支撑。智能车是一个很复杂的系统,电路、机械、传感器、单片机、底层驱动、控制算法……。如果所有的任务都是一个人去完成,固然锻炼了自己,但想做的很好却很不现实。很多新人,来到实验室,来到一个陌生的环境和团队,连向学长请教,和同学交流的勇气都没有,又如何融入团队呢。除了要主动融入团队,还要培养自己的团队意识。团队精神往往表现为一种责任感,如果团队遇到问题,每个人都只顾自己,出了错误,不想着解决问题,而是互相推诿埋怨。这样的团队,肯定是无法取得好成绩的。 l缺乏耐心和细心的精神 其实把一件事做好很简单,细心加上耐心。不细心就想不到,没有耐心,即使想到了也做不到。做事怕麻烦,将就,说白了就是惰性在作祟。明明可以把支架做的更轻更漂亮,明明可以把程序写的更简洁,明明可以把电路设计得更完善……。其实,每个人都有很大潜力,如果不逼自己一次,你永远不知道自己的潜力有多
飞思卡尔杯智能车竞赛报告总结
1.1. 系统分析 智能车竞赛要求设计一辆以组委会提供车模为主体的可以自主寻线的模型车,最后成绩取决于单圈最快时间。因此智能车主要由三大系统组成:检测系统,控制系统,执行系统。其中检测系统用于检测道路信息及小车的运行状况。控制系统采用大赛组委会提供的16位单片机MC9S12XS128作为主控芯片,根据检测系统反馈的信息新局决定各控制量——速度与转角,执行系统根据单片机的命令控制舵机的转角和直流电机的转速。整体的流程如图1.1,检测系统采集路径信息,经过控制决策系统分析和判断,由执行系统控制直流电机给出合适的转速,同时控制舵机给出合适的转角,从而控制智能车稳定、快速地行驶。 图2.1 1.2. 系统设计 参赛小车将电感采集到的电压信号,经滤波,整流后输入到XS128单片机,用光电编码器获得实时车速,反馈到单片机,实现完全闭环控制。速度电机采用模糊控制,舵机采用PD控制,具体的参数由多次调试中获得。考滤到小车设计的综合性很强,涵盖了控制、传感、电子、电气、计算机和机械等多个学科领域,因此我们采用了模块化设计方法,小车的系统框图如图2.2。
第五届全国大学生智能汽车竞赛技术报告 图2.2 1.3. 整车外观 图2.3
1.4. 赛车的基本参数 智能车竞赛所使用的车模是东莞市博思公司生产的G768型车模,由大赛组委会统一提供,是一款带有摩擦式差速器后轮驱动的电动模型车。车模外观如图3.1。车模基本参数如表3.1。 图3.1 表3.1车模基本参数 1.5. 赛车前轮定位参数的选定
第五届全国大学生智能汽车竞赛技术报告 现代汽车在正常行驶过程中,为了使汽车直线行驶稳定,转向轻便,转向后能自动回正,减少轮胎和转向系零件的磨损等,在转向轮、转向节和前轴之间须形成一定的相对安装位置,叫车轮定位,其主要的参数有:主销后倾、主销内倾、车轮外倾和前束。模型车的前轮定位参数都允许作适当调整,故此我们将自身专业课所学的理论知识与实际调车中的赛车状况相结合,最终得出赛车匹配后的前轮参数[6]。 1.5.1. 主销后倾角 主销后倾角是指在纵向平面内主销轴线与地面垂直线之间的夹角γ,如图3-2。模型车的主销后倾角可以设置为0、 2°?3°、 4°?6°,可以通过改变上横臂轴上的黄色垫片来调整,一共有四个垫片,前二后二时为0°,前一后三为2°?3°,四个全装后面时为4°?6°。 由于主销后倾角过大时会引起转向沉重,又因为比赛所用舵机特性偏软,所以不宜采用大的主销后倾角,以接近0°为好,即垫片宜安装采用前二后二的方式,以便增加其转向的灵活性。如图3.3。 图3.2 图3.3 1.5. 2. 主销内倾角 主销内倾角是指在横向平面内主销轴线与地面垂直线之间的夹角β,如图3.4,它的作用也是使前轮自动回正。对于模型车,通过调整前桥的螺杆的长度可以改变主销内倾角的大小,由于前轴与主销近似垂直的关系,故主销内倾角
基于飞思卡尔单片机的智能汽车设计毕业设计(论文)
基于飞思卡尔单片机的智能汽车设计 摘要 本智能车系统设计以 MC9S12DG128B 微控制器为核心,通过一个CMOS 摄像头检测模型车的运动位置和运动方向,使用LM1881视频分离芯片对图像进行处理,用光电传感器检测模型车的速度并使用PID 控制算法调节驱动电机的转速和舵机的方向,完成对模型车运动速度和运动方向的闭环控制。为了提高智能车的行驶速度和可靠性,采用了自制的电路板,在性能和重量上有了更大的优势,对比了各种方案的优缺点。实验结果表明,系统设计方案可行 关键词:MC9S12DG128,CMOS 摄像头,PID
The Research of Small and Medium-sized Electric Machines in Fuan City Author:Yao fang Tutor:Ma shuhua Abstract Fujian Fuan City industry of electric motor and electrical equipment is the one of the most representative phenomenon of industry cluster in Fujian Province mechanical industry. Its output value of small and medium-sized electric machines accounts for 20% of the whole province’s electrical equipment indu stry. The output amount of small and medium-sized electric machines from this region takes up 1/3 of that of the whole nation. Fuan electric motor and electrical equipment industry plays a significant role in the development of local national economy, being considered to be the main growth point of local economy and called "the Chinese electric motor and electrical equipment city ". This paper launched a research on small and medium- sized electric machines in Fuan city from two angles. The first one inferred the situation of Fuan electric machine industrial cluster as well as the analysis of the temporary existed problems, and then propose a few of suggestions on the part of local government. The second part focus on the improvement of the competitiveness of Fuan electric machine enterprises, through the application of Michael Porter's Five Forces Model into the local industry of electric machine, consequently carried out some strategies local enterprises should take. Key Words: small and medium-sized electric machines, Five Forces Model, industrial cluster
飞思卡尔第一张
3.1 实验一 I/O口输入输出实验 4.实验原理 如图3-1所示,将PTB6设置为输出端口后,若向PTB6写高电平时,LED灯不亮,若写低电平,则LED亮。PTA2设置为输入端口后,在按键SW未按下时,读PTA2始终为高电平,只有在按键SW按下时,读PTA2时才得到低电平。 图3-1 LED灯与按键控制电路原理图 5.实验内容 ⑴结合开发板电路图,用跳线夹连接对应LED引脚。即LED1、LED2分别与PTB6、PTB7相连接。将PTB 口定义为输出接口。对端口写0即可点亮LED灯。单步运行观察实验现象。 ⑵结合开发板电路图,用跳线夹再将开发板上的按键SW1、SW2连到PTA2。将PTA口定义为输入口,将PTB口定义为输出口。按下SW1时点亮LED1、LED2。按下SW2时熄灭LED1、LED2。 6.参考程序 ⑴直接点亮LED灯,其参考程序如下。 C语言程序: #include
for(;;) { __RESET_WATCHDOG(); /* 清看门狗 */ } /* 死循环 */ } 汇编程序(加粗部分为所需添加的程序代码): ;******************************************************************* ;* This stationery serves as the framework for a user application. * ;* For a more comprehensive program that demonstrates the more * ;* advanced functionality of this processor, please see the * ;* demonstration applications, located in the examples * ;* subdirectory of the "Freescale CodeWarrior for HC08" program * ;* directory. * ;******************************************************************* ; Include derivative-specific definitions INCLUDE 'derivative.inc' ; ; export symbols ; XDEF _Startup ABSENTRY _Startup ; ; variable/data section ; ORG RAMStart ; Insert your data definition here ExampleVar: DS.B 1 ; ; code section ; ORG ROMStart _Startup: LDHX #RAMEnd+1 ; initialize the stack pointer TXS CLI ; enable interrupts mainLoop: ; Insert your code here MOV #$FF,PTBDD; 端口方向寄存器初始化为输出 MOV #$FF,PTBD; 输出高点平,LED灯灭 MOV #$00,PTBD; 输出低电平,LED灯亮 NOP
飞思卡尔项目书
飞思卡尔智能车比赛项目 参赛时间:2011.7.16 — 2011.7.20 赛前准备时间:2010.7 ---2011.7 飞思卡尔智能车比赛简介: 为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革,受教育部高等教育司委托(教高司函[2005]201号文,附件1),由教育部高等学校自动化专业教学指导分委员会(以下简称自动化分教指委)主办全国大学生智能汽车竞赛。该竞赛是以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。 该竞赛由竞赛秘书处设计、规范标准硬软件技术平台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。该竞赛融科学性、趣味性和观赏性为一体,是以迅猛发展、前景广阔的汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科专业的创意性比赛。该竞赛规则透明,评价标准客观,坚持公开、公平、公正的原则,力求向健康、普及、持续的方向发展。 该竞赛以飞思卡尔半导体公司为协办方,得到了教育部相关领导、飞思卡尔公司领导与各高校师生的高度评价,已发展成全国30个省市自治区近300所高校广泛参与的全国大学生智能汽车竞赛。2008年起被教育部批准列入国家教学质量与教学改革工程资助项目中科技人文竞赛之一(教高函[2007]30号文)。 全国大学生智能汽车竞赛原则上由全国有自动化专业的高等学校(包括港、澳地区的高校)参赛。竞赛首先在各个分赛区进行报名、预赛,各分赛区的优胜队将参加全国总决赛。每届比赛根据参赛队伍和队员情况,分别设立光电组、摄像头组、电磁组、创意组等多个赛题组别。每个学校可以根据竞赛规则选报不同组别的参赛队伍。全国大学生智能汽车竞赛组织运行模式贯彻“政府倡导、专家主办、学生主体、社会参与”的16字方针,充分调动各方面参与的积极性。 全国大学生智能汽车竞赛一般在每年的10月份公布次年竞赛的题目和组织方式,并开始接受报名,次年的3月份进行相关技术培训,7月份进行分赛区竞赛,8月份进行全国总决赛。 飞思卡尔智能车比赛技术要求:
飞思卡尔智能车比赛个人经验总结
先静下心来看几篇技术报告,可以是几个人一起看,边看边讨论,大致了解智能车制作的过程及所要完成的任务。 看完报告之后,对智能车也有了大概的了解,其实总结起来,要完成的任务也很简单,即输入模块——控制——输出。 (1)输入模块:各种传感器(光电,电磁,摄像头),原理不同,但功能都一样,都是用来采集赛道的信息。这里面就包含各种传感器的原理,选用,传感器电路的连接,还有传感器的安装、传感器的抗干扰等等需要大家去解决的问题。 (2)控制模块:传感器得到了我们想要的信息,进行相应的AD转换后,就把它输入到单片机中,单片机负责对信息的处理,如除噪,筛选合适的点等等,然后对不同的赛道信息做出相应的控制,这也是智能车制作过程中最为艰难的过程,要想出一个可行而又高效的算法,确实不是一件容易的事。这里面就涉及到单片机的知识、C语言知识和一定的控制算法,有时为了更直观地动态控制,还得加入串口发送和接收程序等等。 (3)输出模块:好的算法,只有通过实验证明才能算是真正的好算法。经过分析控制,单片机做出了相应的判断,就得把控制信号输出给电机(控制速度)和舵机(控制方向),所以就得对电机和舵机模块进行学习和掌握,还有实现精确有效地控制,又得加入闭环控制,PID算法。 明确了任务后,也有了较为清晰的控制思路,接下来就着手弄懂每一个模块。虽然看似简单,但实现起来非常得不容易,这里面要求掌握电路的知识,基本的机械硬件结构知识和单片机、编程等计算机知识。最最困难的是,在做的过程中会遇到很多想得到以及想不到的事情发生,一定得细心地发现问题,并想办法解决这些问题。 兴趣是首要的,除此之外,一定要花充足的时间和精力在上面,毕竟,有付出就会有收获,最后要明确分工和规划好进度。
飞思卡尔智能车竞赛策略和比赛方案综述
飞思卡尔智能车竞赛策略和比赛方案综述 一、竞赛简介 起源: “飞思卡尔杯”智能车大赛起源于韩国,是韩国汉阳大学汽车控制实验室在飞思卡尔半导体公司资助下举办的以HCSl2单片机为核心的大学生课外科技竞赛。组委会提供一个标准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路径的智能车,在专门设计的跑道上自动识别道路行驶,谁最快跑完全程而没有冲出跑道并且技术报告评分较高,谁就是获胜者。其设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械、能源等多个学科的知识,对学生的知识融合和实践动手能力的培养,具有良好的推动作用。 全国大学生“飞思卡尔”杯智能汽车竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。因而该竞赛是涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的比赛。 该竞赛以飞思卡尔半导体公司为协办方,自2006年首届举办以来,成功举办了五届,得到了教育部吴启迪副部长、张尧学司长及理工处领导、飞思卡尔公司领导与各高校师生的高度评价,已发展成全国30个省市自治区200余所高校广泛参与的全国大学生智能汽车竞赛。2008年第三届被教育部批准列入国家教学质量与教学改革工程资助项目中9个科技人文竞赛之一(教高函[2007]30号文,附件2),2009年第四届被邀申请列入国家教学质量与教学改革工程资助项目。 分赛区、决赛区比赛规则 在分赛区、决赛区进行现场比赛规则相同,都分为初赛与决赛两个阶段。在计算比赛成绩时,分赛区只是通过比赛单圈最短时间进行评比。决赛区比赛时,还需结合技术报告分数综合评定。 1.初赛与决赛规则 1)初赛规则 比赛场中有两个相同的赛道。 参赛队通过抽签平均分为两组,并以抽签形式决定组内比赛次序。比赛分为两轮,两组同时在两个赛道上进行比赛,一轮比赛完毕后,两组交换场地,再进行第二轮比赛。在每轮比赛中,每辆赛车在赛道上连续跑两圈,以计时起始线为计时点,以用时短的一圈计单轮成绩;每辆赛车以在两个单轮成绩中的较好成绩为赛车成绩;计时由电子计时器完成并实时在屏幕显示。 从两组比赛队中,选取成绩最好的25支队晋级决赛。技术评判组将对全部晋级的赛车进行现场技术检查,如有违反器材限制规定的(指本规则之第一条)当时取消决赛资格,由后备首名晋级代替;由裁判组申报组委会执委会批准公布决赛名单。 初赛结束后,车模放置在规定区域,由组委会暂时保管。
飞思卡尔智能车程序
Main.c #include
飞思卡尔智能车设计报告
飞思卡尔智能车设计报告
目录 1.摘要 (3) 2.关键字 (3) 3.系统整体功能模块 (3) 4.电源模块设计 (4) 5.驱动电路设计 (4) 6.干簧管设计 (5) 7.传感器模块设计 (6) 8.传感器布局 (6) 9.软件设计 (7) 9.1控制算法 (7) 9.2软件系统实现(流程图) (10) 10.总结 (11) 11.参考文献 (12)
1.摘要 “飞思卡尔”杯全国大学生智能汽车竞赛是由教育部高等自动化专业教学指导分委员会主办的一项以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。该竞赛以汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的科技创意性比赛。 本文介绍了飞思卡尔电磁组智能车系统。本智能车系统是以飞思卡尔32 位单片机K60为核心,用电感检测赛道导线激发的电磁信号, AD 采样获得当前传感器在赛道上的位置信息,通过控制舵机来改变车的转向,用增量式PID进行电机控制,用编码器来检测小车的速度,共同完成智能车的控制。 2.关键字 电磁、k60、AD、PID、电机、舵机 3.系统整体功能模块 系统整体功能结构图
4.电源模块设计 电源是一个系统正常工作的基础,电源模块为系统其他各个模块提供所需要的能源保证,因此电源模块的设计至关重要。模型车系统中接受供电的部分包括:传感器模块、单片机模块、电机驱动模块、伺服电机模块等。设计中,除了需要考虑电压范围和电流容量等基本参数外,还要在电源转换效率、噪声、干扰和电路简单等方面进行优化。可靠的电源方案是整个硬件电路稳定可靠运行的基础。 全部硬件电路的电源由7.2V,2A/h的可充电镍镉电池提供。由于电路中的不同电路模块所需要的工作电流容量各不相同,因此电源模块应该包含多个稳压电路,将充电电池电压转换成各个模块所需要的电压。 电源模块由若干相互独立的稳压电源电路组成。在本系统中,除了电机驱动模块的电源是直接取自电池外,其余各模块的工作电压都需要经电源管理芯片来实现。 由于智能车使用7.2V镍镉电池供电,在小车行进过程中电池电压会有所下降,故使用低压差电源管理芯片LM2940。LM2940是一款低压稳压芯片,能提供5V的固定电压输出。LM2940低压差稳压芯片克服了早期稳压芯片的缺点。与其它的稳压芯片一样,LM2940需要外接一个输出电容来保持输出的稳定性。出于稳定性考虑,需要在稳压输出端和地之间接一个47uF低等效电阻的电容器。 舵机的工作电压是6伏,采用的是LM7806。 K60单片机和5110液晶显示器需要3.3伏供电,采用的是LM1117。 5.驱动电路设计 驱动电路采用英飞凌的BTS7960,通态电阻只有16mΩ,驱动电流可达43A,具有过压、过流、过温保护功能,输入PWM频率可达到25KHz,电源电压5.5V--27.5V。BTS7960是半桥驱动,实际使用中要求电机可以正反转,故使用两片接成全桥驱动。如图下图所示。
基于飞思卡尔单片机自动循迹小车控制的设计
摘要 随着我国的电子科技的不断发展,我们生活中的自动化设备越来越多,也为嵌入式在智能化上的研究提供了一个广阔的平台。 本系统以MK60DN512VMD100微控制器为核心控制单元,选用OV7620 CMOS 模拟摄像头检测赛道信息,高速AD转换芯片选用TCL5510,将提取后的灰度图像进行软件二值化,进而提取赛道信息;用光电编码器实时检测小车的实时速度,采用PID控制算法调节电机的速度以及舵机转向,从而实现速度和方向的闭环控制。 关键字:MK60DN512VMD100,OV7620 CMOS,软件二值化,PID
Abstract With the continuous development of electronic technology, more and more automation equipment into the production life of the people, the rapid development of embedded intelligent study provides a broader platform. In this paper, the design of intelligent vehicle system MK60DN512VMD100 microcontroller as the core control unit, the selection of OV7620 CMOSanalog cameras to detect the track information, to using TCL5510 high-speed AD converter chip, software binarization image, extract the white guide line for identification of the track information; optical encoder to detect the real-time speed of the model car, using the PID control algorithm to adjust the speed of the drive motor and steering the angle of the steering gear, in order to achieve closed-loop control of velocity and direction of the model car. Keywords: MK60DN512VMD100,OV7620 CMOS,software binarization, PID
飞思卡尔智能车大赛技术报告
第九届“飞思卡尔”杯全国大学生智能车竞赛光电组技术报告 学校:中北大学 伍名称:ARES 赛队员:贺彦兴 王志强 雷鸿 队教师:闫晓燕甄国涌
关于技术报告和研究论文使用授权的说明书本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名: 带队教师签名: 日期:2014-09-15日
摘要 本文介绍了第九届“飞思卡尔杯全国大学生智能车大赛光电组中北大学参赛队伍整个系统核心采用飞思卡尔单片机MC9S12XS128MAA ,利用TSL1401线性CCD 对赛道的行扫描采集信息来引导智能小车的前进方向。机械系统设计包括前轮定位、方向转角调整,重心设计器件布局设计等。硬件系统设计包括线性CCD传感器安装调整,电机驱动电路,电源管理等模块的设计。软件上以经典的PID算法为主,辅以小规Bang-Bang 算法来控制智能车的转向和速度。在智能车系统设计开发过程中使用Altium Designer设计制作pcb电路板,CodeWarriorIDE作为软件开发平台,Nokia5110屏用来显示各实时参数信息并利用蓝牙通信模块和串口模块辅 助调试。关键字:智能车摄像头控制器算法。
目录 1绪论 (1) 1.1 竞赛背景 (1) 1.2国内外智能车辆发展状况 (1) 1.3 智能车大赛简介 (2) 1.4 第九届比赛规则简介 (2) 2智能车系统设计总述 (2) 2.1机械系统概述 (3) 2.2硬件系统概述 (5) 2.3软件系统概述 (6) 3智能车机械系统设计 (7) 3.1智能车的整体结构 (7) 3.2前轮定位 (7) 3.3智能车后轮减速齿轮机构调整 (8) 3.4传感器的安装 (8) 4智能车硬件系统设计 (8) 4.1XS128芯片介绍 (8) 4.2传感器板设计 (8) 4.2.1电磁传感器方案选择 (8) 4.2.2电源管理模 (9) 4.2.3电机驱动模块 (10) 4.2.4编码器 (11) 5智能车软件系统设 (11) 5.1程序概述 (11) 5.2采集传感器信息及处理 (11) 5.3计算赛道信息 (13) 5.4转向控制策略 (17) 5.5速度控制策略 (19) 6总结 (19)