KL变换应用于人脸识别

基于K-L 变换的人脸识别
一、基本要求
从网上下载人脸图像,构建人脸训练数据库和测试数据库,采用K-L 变换进行特征脸提取,并实现人脸识别。通过K-L 变换在人脸识别中的应用,加深对所学内容的理解和感性认识。
1、或者从网上下载其它数据库,编程实现K-L 变换。
2、课堂报告、并提交实验报告及相应程序。
二、实验原理
1、K-L 变换:就是以样本特征向量在特征空间分布为原始数据,通过变换,找 到维数较少的组合特征,达到降维的目的。
K-L 变换是一种正交变换,即将一个向量X ,在某一种坐标系统中的描述,转换成用另一种基向量组成的坐标系表示。这组基向量是正交的,其中每个坐标
基向量用j u 表示,∞=,2,1 ,
j ,因此,一个向量X 可表示成 ∑∞
==
1
j j
j
u
c X
如果我们将由上式表示的无限多维基向量坐标系统改成有限维坐 标系近似,即
∑=∧
=d
j j j u c X 1
表示X 的近似值或估计量,我们希望在同样维数条件下,使向量X 的估计量误差最小。确切地说是使所引起的均方误差:
)]?()?[(X X X
X E T --=ξ 为最小。K-L 变换可以实现这个目的。
因为
??
?≠==i
j i
j u u i T
j 0
1
将 ∑∞
+=∧
=
-1
d j j
j
u
c X X 带入到)]?()?[(X X X
X E T --=ξ中可得到 ][
1
2
∑∞
==j j
c
E ξ
容易看到 X
u c T
j j =
因此 ][
1
∑∞
+=d j T
T j u XX u E ξ 由于j u 是确定性向量,因此上式可改写为 []
∑∞
+==
1
d j j T
T j u XX E u ξ 令 []
T
XX E =ψ
则 ∑∞
+==
1
d j j T j u u ψξ
用拉格朗日乘子法,可以求出在满足正交条件下,ξ取极值的坐标系统,即用函数
∑∑∞
+=∞
+=--
=1
1
]1[d j j T
j j d j j T
j
j u u u u u g λψ)
( 对j u ,∞+=,,1 d j 求导数,因此有
∞+==,,1,0- d j u I j j )(λψ 我们令0=d ,从而可得到以下的结论:
以矩阵ψ的本征向量座位坐标轴来展开X 时,其截断均方误差具有极值性质,且当取d 个d j u j ,,2,1 =,来逼近X 时,其均方误差 ∑∞
+==
1
d j j
λ
ξ
式中j λ是矩阵ψ的相应本征值。
可以证明,当取d 个与矩阵ψ的d 个最大本征值对应的本征向量来展开X
时,其截断均方误差和在所有其他正交坐标系情况下用d 个坐标展开X 时所引起的均方误差相比为最小。这d 个本征向量所组成的正交坐标系称作X 所在的
D 维空间的d 维K-L 变换坐标系,在坐标系上的展开系数向量称为X 的变换。
本实验所采用的人物脸部灰度图像默认已经过归一化,所以对于图像的归一化,我们不予处理。可以以样本集的总体散布矩阵为产生矩阵,即:
∑-=--=∑10
))((1M i T i i
x x
M
μμ
其中:i x 表示第i 个训练样本图像 ,μ表示训练样本集的平均图像向量,M 为训练样本的总数。
2、奇异值分解:为了求22*N N 维∑矩阵的特征值和正交归一的特征向量,直接计算是困难的。为此引入了SVD 定理:
设A 是一秩为r 的n*r 维矩阵,则存在两个正交矩阵: I U U u u u U T r
n r =?∈=-*110],,,[
I V V v v v V T r
r r =?∈=-*110],,,[
以及对角阵
r
r r diag *110],,,[?∈=Λ-λλλ ,
且 110
-≥≥≥r λλλ
满足 T
V U A 2
1Λ=
其中:)1,,1,0(-=r i i λ为矩阵T AA 和A A T 的非零特征值,i u 和i v 分别为
T AA 和 A A T 对应于i λ的特征向量。上述分解称为矩阵的奇异值分解,简称SVD ,
i
λ为A 的奇异值。
又有推论 2
1
Λ=AV U 易知
1,,2,1,01
-==
M i Xv u i
i
i λ
这就是图像的特征向量。它是通过计算较低为矩阵R 的特征值与特征向量而间接求出的。
3、特征向量的选取:我们总共的得到M 个特征向量。虽然 M 比 2N 小很多。但通常情况下,仍然会很大。而事实上,根据应用的需要,并非所有的都有很大的保留意义。
考虑到使用变换作为对人脸图像的压缩手段,可以选取最大的前k 个特征向
量,使得
αλ
λ
≥∑∑-==10
0M i i
k
i i
上式中,可以选取%99=α。这说明样本及在前个轴上能量占整个能量的99%以上。
4、产生矩阵的选取: 在考虑到训练样本的类别信息,对人脸识别会有更大意义,以及节省计算量的前提下,我们采用训练样本集的类间散布矩阵作为K-L 变换的产生矩阵,即: ∑-=--=
1
))()((P i T i i
i
b P S μμμμ
ω
其中:i μ为训练样本集中第i 个人的平均图像向量,P 为训练样本集中的总人数,本实验()i P ω不予考虑。显然,与总体散布矩阵∑相比,特征脸的个数由M 降低到P ,因而在计算量上要减少很多。对于每个人的训练样本的平均图像向量
)1,,1,0(-==P i i μ,向由“特征脸”图像向量所展成的P 子空间上投影,其
坐标系数向量就是其K-L 变换的展开系数向量,即: 1,,1,0,-==P i U c i T i μ
可知
T T
V X U C 2
1
∑== 其中:],,,[110-=P c c c C ,i c 为训练样本集中第i 个人的特征系数向量。
三、实验过程
1、对于选取每个人n 幅脸图像作为训练样本集的正确率
第一步: 搜集人脸图像,建立人脸库。共40个人,每人9幅。
第二步:选定产生矩阵∑=--=7
0))()((i T i i i b P S μμμμω,分别选取每个人
n(n=1,2,...,7)幅脸图像作为训练样本集,进行K-L 变换,利用奇异值 分解计算出相应的特征向量。确定%99=α,计算选取出“特征脸” 向量并计算出每个人训练样本的平均图像向量)7,,1,0( =i i
μ在
由“特征脸”图像向量所张成的子空间上坐标系数向量。
第三步:选取所有人第8、9两张脸图像进行测试,分别计算出它们在特征脸 空间中的坐标系数向量,即特征系数向量。 第四步:分别计算测试样本特征系数向量与每个人训练样本特征系数向量的欧氏 距离,选取距离最小的样本类别作为识别结果,并与测试样本本身所属 于的类别比较,判断识别的正误。 第五步:统计正确的次数,计算正确率。
2、选取不同的α值计算测试样本的识别正确率
第一步:产生矩阵依旧为 ∑=--=7
0))()((i T i i i b P S μμμμω。确定训练样本集为
所有人第1至7幅脸图像,测试样本集还是所有人第8、9张脸图像。 第二步:利用上面实验的部分结果,分别取α为不同值,计算并选取出对应的“特 征脸”向量。
第三步:对于不同的α值,计算出测试样本集的特征系数向量。
第四步:计算测试样本集特征系数向量与样本集中每个人的特征系数向量的欧 氏距离,选取距离最小的样本类别作为识别结果,并与测试样本本身所 属于的类别比较,判断识别的正误。 第五步:统计α取不同值的识别正确率,比较。
3、显示识别图像和特征脸图像
选取训练样本集为所有人第1至7幅脸图像,测试样本集为随机选取的5个不同人脸图像,取%99=α,利用上面两个实验部分结果进行识别,并显示结果和部分特征脸图像。
四、实验结果:
表1 以类间散布矩阵为产生矩阵的K-L 变换进行人脸识别正确率(%99=α) 训练集中每个人图片数 1 2 3 4 5 6 7 识别正确率 67.5% 78.75% 76.25% 80% 86.25% 90% 90%
表2 不同的α值对人脸识别正确率的影响(训练集中每个人图片数为7)
α值对识别正确率的影响
α值
50% 55% 65% 70% 75% 80% 85% 95% 99% 识别正确率 47.5% 62.5% 63.75% 70% 78.75% 88.75% 88.75% 90%
90%
部分识别人脸图像
部分特征脸图像
四、实验结论
1、由表1可知测试样本集的识别正确率随着训练样本中的每个人的人脸图片数 的增加而增大(%99=α)。
2、由表2可知测试样本集的识别正确率在一定范围内随着α值的增大而增大(训 练集中每个人图片数为7)
五、实验心得
这个实验比较有意思,与生活中的某些应用也有联系,通过做这个作业,更加认识到理论应用于实际的作用,同时对课本这部分内容也有了更全面的了解。
六、附录(实验代码)
clc
clear all for i=1:40
for j=1:9 %一共有40人的人脸图片,每人读取9张 if i<10
strname=strcat('C:\Users\yeqi\Desktop\1\orl_00',num2str(i),'_00',num2str(j),'.bmp');%生成图片文件的路径 else
strname=strcat('C:\Users\yeqi\Desktop\1\orl_0',num2str(i),'_00',n um2str(j),'.bmp');%生成图片文件的路径 end
fid=imread(strname); [row,clo]=size(fid);
face(:,9*(i-1)+j)=reshape(fid,[row*clo,1]); end end
fu1=7; %训练样本选取每个人fu1张图像
Total=40; %定义变量,标定了待识别的人数 X=zeros(row*clo,Total);%初始化变量X ,训练样本中元素由每个人的平均图像向量组成
for i=1:Total
Yangben=face(:,9*(i-1)+1: 9*(i-1)+fu1);%把样本集face 中的每个人的前fu 张图片组成训练集
X(:,i)=mean(Yangben,2);%求得每个人的平均图像向量 end
meanvetor=mean(X,2);%求得总体的平均图像向量 X1=X;
for i=1:Total
X(:,i)=X(:,i)-meanvetor;%求得训练集,由每个人平均图像向量减去总体平均图像向量得到
end
pmetrix=X'*X; %求X'*X,应用的原理是奇异值分解的推论
[vet vetvalue]=eig(pmetrix);%求特征值和特征向量
vet=fliplr(vet); %对特征值由大到小
vetvalue=fliplr(vetvalue);%对特征值由大到小排列,相应的特征向量也进行变换for jj1=1:40
U(:,jj1)=(1/sqrt(vetvalue(41-jj1,jj1)))*X*vet(:,jj1);%应用奇异值分解的推论得到正交化的特征脸
end
Cvetvalue=sum(vetvalue);
Ctotal=sum(Cvetvalue,2);
a=0.99; %选取能量比
for i=1:Total
parttotal=sum(Cvetvalue(1,1:i));
ratio=parttotal/Ctotal;
if ratio>a %选择最大的前i个特征值,由这些值的和在总特征值中占得比例大于a break;
end
end
A= U(:,1:i)';%选择前i个特征值对应的特征向量组成特征脸
y= A*X1;%求训练集中各图像在特征脸空间中的坐标
bianshi=zeros(6,Total);
for i=1:Total
face=double(face);
for j=8:9 %每个人图像第8、9张做为待识别的图像
ceshi=face(:,(i-1)*9+j);
zbceshi=A*ceshi; %求得其在特征脸空间的坐标
for k=1:Total
wucha=zbceshi-y(:,k);
wuchametrix(:,k)=wucha'*wucha; %计算该坐标与训练集中各图像坐标之间的距离
end
[h,I]=min(wuchametrix); %最近邻法进行人脸识别
if I==i %统计每个待辨识图像是否成功识别,成功为1,失败为0
bianshi(j-7,i)=1;
else
bianshi(j-7,i)=0;
end
end
end
gg=sum(bianshi);
gg=sum(gg,2);
chenggongratio=gg/(2*Total) %用识别正确的图像个数除以总图像个数得到识别正确率
for n1=1:20 %显示前20张特征脸
A1=U(1:row*clo/3,n1);
[min1,num1]=min(A1);
[max1,num2]=max(A1);
A1=(1/(max1-min1))*A1;
B=reshape(A1,row,clo/3);
B1=mat2gray(B);
subplot(4,5,n1),imshow(B)
hold on
end
快速傅里叶变换的意义
傅里叶变换能将满足一定条件的某个函数表示成三角函数(正弦和/或余弦函数)或者它们的积分的线性组合。在不同的研究领域,傅里叶变换具有多种不同的变体形式,如连续傅里叶变换和离散傅里叶变换。最初傅里叶分析是作为热过程的解析分析的工具被提出的。 傅里叶变换属于谐波分析。 傅里叶变换的逆变换容易求出,而且形式与正变换非常类似; 正弦基函数是微分运算的本征函数,从而使得线性微分方程的求解可以转化为常系数的代数方程的求解.在线性时不变的物理系统内,频率是个不变的性质,从而系统对于复杂激励的响应可以通过组合其对不同频率正弦信号的响应来获取; 卷积定理指出:傅里叶变换可以化复杂的卷积运算为简单的乘积运算,从而提供了计算卷积的一种简单手段; 离散形式的傅里叶变换可以利用数字计算机快速的算出(其算法称为快速傅里叶变换算法(FFT)). 1、为什么要进行傅里叶变换,其物理意义是什么? 傅立叶变换是数字信号处理领域一种很重要的算法。要知道傅立叶变换算法的意义,首先要了解傅立叶原理的意义。傅立叶原理表明:任何连续测量的时序或信号,都可以表示为不同频率的正弦波信号的无限叠加。而根据该原理创立的傅立叶变换算法利用直接测量到的原始信号,以累加方式来计算该信号中不同正弦波信号的频率、振幅和相位。 和傅立叶变换算法对应的是反傅立叶变换算法。该反变换从本质上说也是一种累加处理,这样就可以将单独改变的正弦波信号转换成一个信号。 因此,可以说,傅立叶变换将原来难以处理的时域信号转换成了易于分析的频域信号(信号的频谱),可以利用一些工具对这些频域信号进行处理、加工。最后还可以利用傅立叶反变换将这些频域信号转换成时域信号。 从现代数学的眼光来看,傅里叶变换是一种特殊的积分变换。它能将满足一定条件的某个函数表示成正弦基函数的线性组合或者积分。在不同的研究领域,傅里叶变换具有多种不同的变体形式,如连续傅里叶变换和离散傅里叶变换。 在数学领域,尽管最初傅立叶分析是作为热过程的解析分析的工具,但是其思想方法仍然具有典型的还原论和分析主义的特征。"任意"的函数通过一定的分解,都能够表示为正弦函数的线性组合的形式,而正弦函数在物理上是被充分研究而相对简单的函数类:1. 傅立叶变换是线性算子,若赋予适当的范数,它还是酉算子;2. 傅立叶变换的逆变换容易求出,而且形式与正变换非常类似;3. 正弦基函数是微分运算的本征函数,从而使得线性微分方程的求解可以转化为常系数的代数方程的求解.在线性时不变杂的卷积运算为简单的乘积运算,从而提供了计算卷积的一种简单手段;5. 离散形式的傅立叶的物理系统内,频率是个不变的性质,从而系统对于复杂激励的响应可以通过组合其对不同频率正弦信号的响应来获取;4. 著名的卷积定理指出:傅立叶变换可以化复变换可以利用数字计算机快速的算出(其算法称为快速傅立叶变换算法(FFT))。 正是由于上述的良好性质,傅里叶变换在物理学、数论、组合数学、信号处理、概率、统计、密码学、声学、光学等领域都有着广泛的应用。 2、图像傅立叶变换的物理意义 图像的频率是表征图像中灰度变化剧烈程度的指标,是灰度在平面空间上的梯度。如:大面积的沙漠在图像中是一片灰度变化缓慢的区域,对应的频率值很低;而对于地表属性变换剧烈的边缘区域在图像中是一片灰度变化剧烈的区
KL变换与主成分分析
主成分分析(PCA)是多元统计分析中用来分析数据的一种方法,它是用一种较少数量的特征对样本进行描述以达到降低特征空间维数的方法,它的本质实际上是K-L变换。PCA方法最著名的应用应该是在人脸识别中特征提取及数据维,我们知道输入200*200大小的人脸图像,单单提取它的灰度值作为原始特征,则这个原始特征将达到40000维,这给后面分类器的处理将带来极大的难度。著名的人脸识别Eigenface 算法就是采用PCA算法,用一个低维子空间描述人脸图像,同时用保存了识别所需要的信息。下面先介绍下PCA算法的本质K- L变换。 1、K-L变换(卡洛南-洛伊(Karhunen-Loeve)变换):最优正交变换 一种常用的特征提取方法; 最小均方误差意义下的最优正交变换; 在消除模式特征之间的相关性、突出差异性方面有最优的效果。离散K-L变换:对向量x(可以想象成M维=width*height 的人脸图像原始特征)用确定的完备正交归一向量系u j展开:
这个公式由来我想应该是任一n维欧式空间V均存在正交基,利用施密特正交化过程即可构建这个正交基。 现在我们希望用d个有限项来估计向量x,公式如下: 计算该估计的均方误差如下: 要使用均方误差最小,我们采用Langrange乘子法进行求解:
因此,当满足上式时, 取得最小值。 即相关矩阵R的d个特征向量(对应d个特征值从大到小排列)为基向量来展开向量x时,其均方误差最小,为: 因此,K-L变换定义:当取矩阵R的d个最大特征值对应的特征向量来展开x时,其截断均方误差最小。这d个特征向量组成的正交坐标系称作x所在的D维空间的d维K-L变换坐标系,x在K-L坐标系上的展开系数向量y称作x的K-L变换。 总结下,K-L变换的方法:对相关矩阵R的特征值由大到小进行排队, 则均方误差最小的x近似于:
KL变换应用于人脸识别
基于K-L 变换的人脸识别 一、基本要求 从网上下载人脸图像,构建人脸训练数据库和测试数据库,采用K-L 变换进行特征脸提取,并实现人脸识别。通过K-L 变换在人脸识别中的应用,加深对所学内容的理解和感性认识。 1、或者从网上下载其它数据库,编程实现K-L 变换。 2、课堂报告、并提交实验报告及相应程序。 二、实验原理 1、K-L 变换:就是以样本特征向量在特征空间分布为原始数据,通过变换,找 到维数较少的组合特征,达到降维的目的。 K-L 变换是一种正交变换,即将一个向量X ,在某一种坐标系统中的描述,转换成用另一种基向量组成的坐标系表示。这组基向量是正交的,其中每个坐标 基向量用j u 表示,∞=,2,1 , j ,因此,一个向量X 可表示成 ∑∞ == 1 j j j u c X 如果我们将由上式表示的无限多维基向量坐标系统改成有限维坐 标系近似,即 ∑=∧ =d j j j u c X 1 表示X 的近似值或估计量,我们希望在同样维数条件下,使向量X 的估计量误差最小。确切地说是使所引起的均方误差: )]?()?[(X X X X E T --=ξ 为最小。K-L 变换可以实现这个目的。 因为 ?? ?≠==i j i j u u i T j 0 1
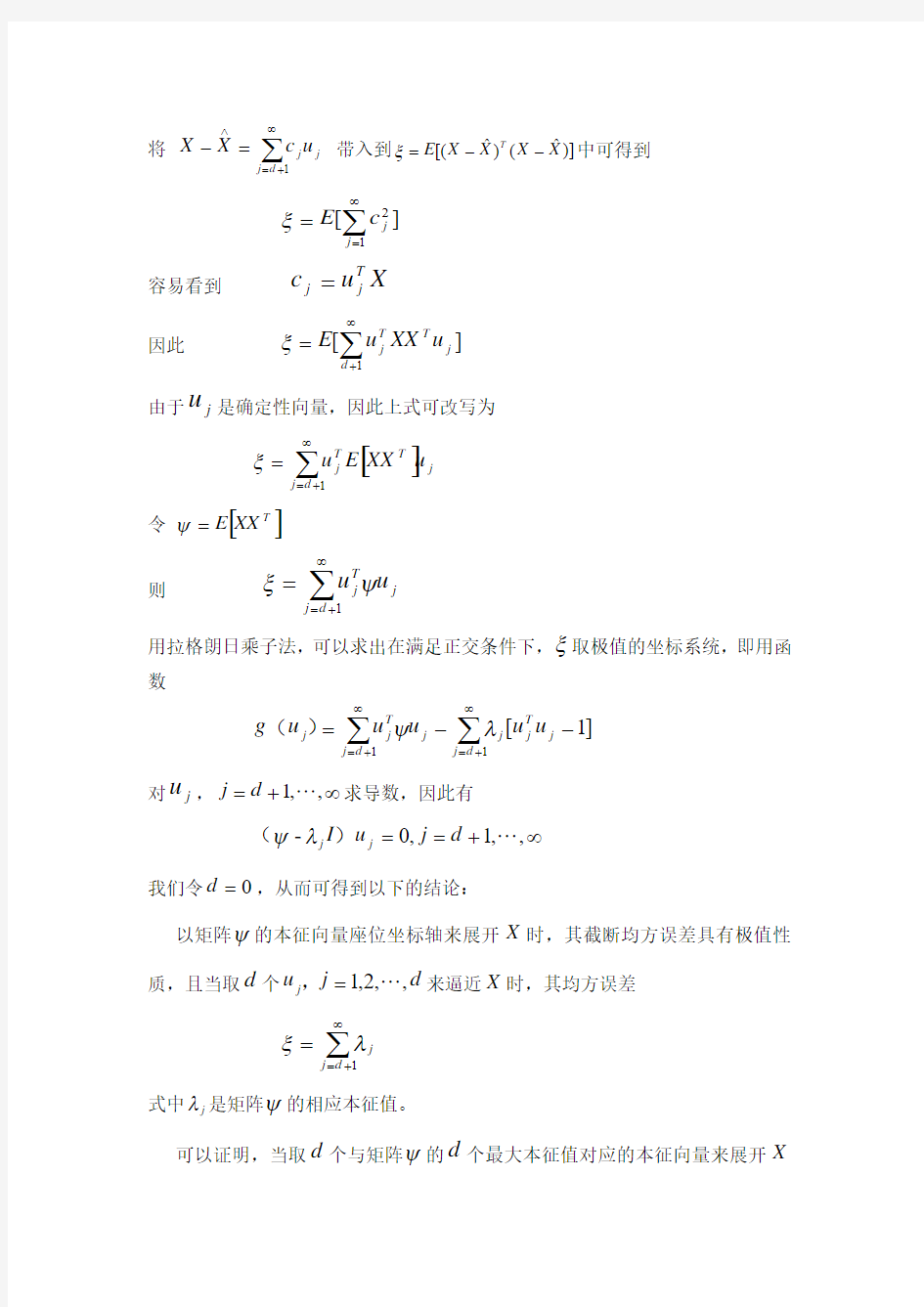
将 ∑∞ +=∧ = -1 d j j j u c X X 带入到)]?()?[(X X X X E T --=ξ中可得到 ][ 1 2 ∑∞ ==j j c E ξ 容易看到 X u c T j j = 因此 ][ 1 ∑∞ +=d j T T j u XX u E ξ 由于j u 是确定性向量,因此上式可改写为 [] ∑∞ +== 1 d j j T T j u XX E u ξ 令 [] T XX E =ψ 则 ∑∞ +== 1 d j j T j u u ψξ 用拉格朗日乘子法,可以求出在满足正交条件下,ξ取极值的坐标系统,即用函数 ∑∑∞ +=∞ +=-- =1 1 ]1[d j j T j j d j j T j j u u u u u g λψ) ( 对j u ,∞+=,,1 d j 求导数,因此有 ∞+==,,1,0- d j u I j j )(λψ 我们令0=d ,从而可得到以下的结论: 以矩阵ψ的本征向量座位坐标轴来展开X 时,其截断均方误差具有极值性质,且当取d 个d j u j ,,2,1 =,来逼近X 时,其均方误差 ∑∞ +== 1 d j j λ ξ 式中j λ是矩阵ψ的相应本征值。 可以证明,当取d 个与矩阵ψ的d 个最大本征值对应的本征向量来展开X
小波变换详解
基于小波变换的人脸识别 近年来,小波变换在科技界备受重视,不仅形成了一个新的数学分支,而且被广泛地应用于模式识别、信号处理、语音识别与合成、图像处理、计算机视觉等工程技术领域。小波变换具有良好的时频域局部化特性,且其可通过对高频成分采取逐步精细的时域取样步长,从而达到聚焦对象任意细节的目的,这一特性被称为小波变换的“变聚焦”特性,小波变换也因此被人们冠以“数学显微镜”的美誉。 具体到人脸识别方面,小波变换能够将人脸图像分解成具有不同分辨率、频率特征以及不同方向特性的一系列子带信号,从而更好地实现不同分辨率的人脸图像特征提取。 4.1 小波变换的研究背景 法国数学家傅立叶于1807年提出了著名的傅立叶变换,第一次引入“频率”的概念。傅立叶变换用信号的频谱特性来研究和表示信号的时频特性,通过将复杂的时间信号转换到频率域中,使很多在时域中模糊不清的问题,在频域中一目了然。在早期的信号处理领域,傅立叶变换具有重要的影响和地位。定义信号(t)f 为在(-∞,+∞)内绝对可积的一个连续函数,则(t)f 的傅立叶变换定义如下: ()()dt e t f F t j ωω-? ∞ -∞ += (4-1) 傅立叶变换的逆变换为: ()()ωωπ ωd e F t f t j ? +∞ ∞ -= 21 (4-2) 从上面两个式子可以看出,式(4-1)通过无限的时间量来实现对单个频率
的频谱计算,该式表明()F ω这一频域过程的任一频率的值都是由整个时间域上的量所决定的。可见,式(4-1)和(4-2)只是同一能量信号的两种不同表现形式。 尽管傅立叶变换可以关联信号的时频特征,从而分别从时域和频域对信号进行分析,但却无法将两者有效地结合起来,因此傅立叶变换在信号的局部化分析方面存在严重不足。但在许多实际应用中,如地震信号分析、核医学图像信号分析等,研究者们往往需要了解某个局部时段上出现了哪个频率,或是某个频率出现在哪个时段上,即信号的时频局部化特征,傅立叶变换对于此类分析无能为力。 因此需要一种如下的数学工具:可以将信号的时域和频域结合起来构成信号的时频谱,描述和分析其时频联合特征,这就是所谓的时频局部化分析方法,即时频分析法。1964年,Gabor 等人在傅立叶变换的基础上引入了一个时间局部化“窗函数”g(t),改进了傅立叶变换的不足,形成窗口化傅立叶变换,又称“Gabor 变换”。 定义“窗函数”(t)g 在有限的区间外恒等于零或很快地趋于零,用函数(t )g -τ乘以(t)f ,其效果等同于在t =τ附近打开一个窗口,即: ()()()dt e t g t f G t j f ωττω-+∞ ∞--=?, (4-3) 式(4-3)即为函数f(t)关于g(t)的Gabor 变换。由定义可知,信号(t)f 的Gabor 变换可以反映该信号在t =τ附近的频谱特性。其逆变换公式为: ()()()ττωτωπ ωd G t g e d t f f t j ,21 ? ?+∞ ∞ --- = (4-4) 可见()τω,f G 的确包含了信号(t)f 的全部信息,且Gabor 窗口位置可以随着 τ的变化而平移,符合信号时频局部化分析的要求。 虽然Gabor 变换一定程度上克服了傅立叶变换缺乏时频局部分析能力的不
傅里叶变换的应用
傅立叶变换在图像处理中有非常非常的作用。因为不仅傅立叶分析涉及图像处理的很多方面,傅立叶的改进算法, 比如离散余弦变换,gabor与小波在图像处理中也有重要的分量。 印象中,傅立叶变换在图像处理以下几个话题都有重要作用: 1.图像增强与图像去噪 绝大部分噪音都是图像的高频分量,通过低通滤波器来滤除高频——噪声; 边缘也是图像的高频分量,可以通过添加高频分量来增强原始图像的边缘; 2.图像分割之边缘检测 提取图像高频分量 3.图像特征提取: 形状特征:傅里叶描述子 纹理特征:直接通过傅里叶系数来计算纹理特征 其他特征:将提取的特征值进行傅里叶变换来使特征具有平移、伸缩、旋转不变性 4.图像压缩 可以直接通过傅里叶系数来压缩数据;常用的离散余弦变换是傅立叶变换的实变换; 傅立叶变换 傅里叶变换是将时域信号分解为不同频率的正弦信号或余弦函数叠加之和。连续情况下要求原始信号在一个周期内满足绝对可积条件。离散情况下,傅里叶变换一定存在。冈萨雷斯版<图像处理>里面的解释非常形象:一个恰当的比喻是将傅里叶变换比作一个玻璃棱镜。棱镜是可以将光分解为不同颜色的物理仪器,每个成分的颜色由波长(或频率)来决定。傅里叶变换可以看作是数学上的棱镜,将函数基于频率分解为不同的成分。当我们考虑光时,讨论它的光谱或频率谱。同样,傅立叶变换使我们能通过频率成分来分析一个函数。 傅立叶变换有很多优良的性质。比如线性,对称性(可以用在计算信号的傅里叶变换里面); 时移性:函数在时域中的时移,对应于其在频率域中附加产生的相移,而幅度频谱则保持不变; 频移性:函数在时域中乘以e^jwt,可以使整个频谱搬移w。这个也叫调制定理,通讯里面信号的频分复用需要用到这个特性(将不同的信号调制到不同的频段上同时传输); 卷积定理:时域卷积等于频域乘积;时域乘积等于频域卷积(附加一个系数)。(图像处理里面这个是个重点) 信号在频率域的表现 在频域中,频率越大说明原始信号变化速度越快;频率越小说明原始信号越平缓。当频率为0时,表示直流信号,没有变化。因此,频率的大小反应了信号的变化
基于KL变换的人脸识别
基于K-L变换的人脸识别 一、实验原理及基本要求 特征脸方法是基于K-L变换的人脸识别方法,K-L变换是图像压缩的一种最优正交变换。高维的图像空间经过K-L变换后得到一组新的正交基,保留其中重要的正交基,由这些基可以张成低维线性空间。如果假设人脸在这些低维线性空间的投影具有可分性,就可以将这些投影用作识别的特征矢量,这就是特征脸方法用于人脸识别的基本思想。在人脸识别中,可以用离散K-L变换对人脸图像的原始空间进行转换,即构造人脸图像数据集的协方差矩阵,对之进行正交变换,求出协方差矩阵的特征向量,再依据特征值的大小对这些特征向量进行排序,每一个向量表示人脸图像中一个不同数量的变量,这些特征向量表示特征的一个集合,它们共同表示一个人脸图像。在人脸识别领域,人们常称这些特征向量为特征脸。每一个体人脸图像都可以确切地表示为一组特征脸的线性组合。这样我们首先通过有指导的训练(给定训练样本集已知分类)得到样本集在特征脸空间中的坐标。训练完成后,输入待辨识图像,求得在特征脸空间的坐标,采用欧式距离法,就可以实现人脸识别。 我们从网上下载人脸图像,构建人脸训练数据库和测试数据库,采用K-L变换进行特征脸提取,并实现人脸识别。通过K-L变换在人脸识别中的应用,加深对所学内容的理解和感性认识。 二、具体做法及流程图 ORL人脸库是由英国剑桥Olivetti实验室从1992年4月到1994年4月期间拍摄的一系列人脸图像组成,共有40个不同年龄、不同性别和不同种族的对象。每个对象10幅图像共计400幅灰度图像组成,图像尺寸是92×112,图像背景为黑色。其中人脸部分表情和细节均有变化,例如笑与不笑、眼睛睁着或闭着,戴或不戴眼镜等,人脸姿态也有变化,其深度旋转和平面旋转可达20度,人脸尺寸也有最多10%的变化。该库是目前使用最广泛的标准数据库,它含有大量的比较结果。 本次试验我们用的是ORL人脸库中的人脸样本集,每个人的人脸样本集中含有十个人脸样本。我们从其中挑出训练样本和测试样本。对训练样本集采用K-L变换进行特征脸提取,并对测试样本集进行人脸识别。 步骤:
基于Gabor小波变换的人脸表情特征提取
—172 — 基于Gabor 小波变换的人脸表情特征提取 叶敬福,詹永照 (江苏大学计算机科学与通信工程学院,镇江 212013) 摘 要:提出了一种基于Gabor 小波变换的人脸表情特征提取算法。针对包含表情信息的静态灰度图像,首先对其预处理,然后对表情子区域执行Gabor 小波变换,提取表情特征矢量,进而构建表情弹性图。最后分析比较了在不同光照条件下不同测试者做出6种基本表情时所提取的表情特征,结果表明Gabor 小波变换能够有效地提取与表情变化有关的特征,并能有效地屏蔽光照变化及个人特征差异的影响。关键词:模式识别;表情特征提取;Gabor 小波变换 Facial Expression Features Extraction Based on Gabor Wavelet Transformation YE Jingfu, ZHAN Yongzhao (School of Computer Science and Communications Engineering, Jiangsu University, Zhenjiang 212013) 【Abstract 】This paper introduces a facial expression features extraction algorithm. Given a still image containing facial expression information,preprocessors are executed firstly. Secondly, expression feature vectors of the expression sub-regions are extracted by Gabor wavelet transformation to form expression elastic graph. Different expression features are extracted and compared while different subjects display six basic expressions with illumination variety. Experiment shows that expression features can be extracted effectively based on Gabor wavelet transformation, which is insensitive to illumination variety and individual difference. 【Key words 】Pattern recognition; Expression feature extraction; Gabor wavelet transformation 计 算 机 工 程Computer Engineering 第31卷 第15期 Vol.31 № 15 2005年8月 August 2005 ·人工智能及识别技术·文章编号:1000—3428(2005)15—0172—03 文献标识码:A 中图分类号:TP37 人脸表情识别是指从给定的表情图像或者视频序列中分析检测出特定的表情状态,进而确定被识别对象的心理情绪。人脸表情识别技术在许多领域有着潜在的应用价值,这些领域包括心理学研究、图像理解、合成脸部动画、视频检索、机器人技术、虚拟现实技术以及新型人机交互环境等[1]。 典型的人脸表情识别系统包括人脸检测、表情特征提取、表情特征分类识别3个阶段。人脸检测要能够从复杂的背景中检测出人脸的存在并确定其位置,对于图像序列,还要能精确跟踪人脸区域,国内外在人脸检测方面已做了大量的研究,且已有相关的有效方法及成果报道。而对于表情特征的提取和分类识别算法的研究目前还处于探索之中,国外学者已做了一定的研究工作,国内关于这方面的研究则相对较少。 针对处理图像的性质,可将表情特征提取方法分为两类:基于静态图像的表情特征提取和基于视频序列的动态表情特征提取。前者处理的是单帧静态表情图像,一般要求该图像反映的表情处于夸张或极大状态,使得提取的表情特征更为典型,这类方法主要包括主成份分析、奇异值分解以及基于小波变换的方法等。后者处理的是表情图像序列,目标是提取表情特征的变化过程。光流模型(Optical Flow Models)是提取动态表情特征的典型方法。比较而言,静态方法处理的数据量少,方法简单可靠,且提取的特征较为典型,能获得较高的识别率,但待处理的图像所包含的表情信息需处于夸张状态。而动态方法处理视频序列中的每一帧图像,因此计算量较大,难以满足实时性要求。 1表情图像的预处理 表情图像的预处理包括表情图像子区域的分割以及表情图像的归一化处理。前者指从表情图像中分割出与表情最相关的子区域,而后者包括图像的灰度均衡和尺度归一。图像预处理的好坏直接影响表情特征提取的效果和计算量。 (a) (b) 图1 分割人脸表情图像以提取特征区域 人脸表情特征可分为两类:持久性表情特征和瞬态表情特征,前者包括嘴巴、眼睛和眉毛,决定了基本表情状态,后者包括脸颊和额角皱纹的瞬间变化,能在一定程度上揭示表情状态。实验表明[3],嘴角形状对表情的影响最大,其次是眼睛和眉毛,而皱纹变化属于动态特征,且受年龄等因素影响较大,对表情的贡献不大,甚至会对表情识别产生不利影响。因此表情识别应重点提取嘴巴、眼睛和眉毛等局部表情特征,并忽略皱纹的变化。图像分割算法的目标就是要精确定位和分离出持久表情特征子区域。对于样本图像,可以人工框出这些区域,也可以根据眼睛的灰度特征并结合先验知识采用特定的定位算法实现特征区域的自动分割。分割结 基金项目:国家自然科学基金资助项目(60273040);江苏省高校自然科学基金资助项目(02KJB520003) 作者简介:叶敬福(1980—),男,硕士生,研究方向:多媒体技术,CSCW ;詹永照,教授、博导 定稿日期:2004-06-26 E-mail :yejingfu@https://www.360docs.net/doc/2913138474.html,
模式识别作业三——kl变换
模式识别作业报告 组员: 2011302265 孔素瑶 2011302268 马征 2011302273 周昳慧
一、实验要求 用FAMALE.TXT 和MALE.TXT 的数据作为本次实验使用的样本集,利用K-L 变换对该样本集进行变换,与过去用Fisher 线性判别方法或其它方法得到的分类面进行比较,从而加深对所学内容的理解和感性认识。 二、具体做法 1. 不考虑类别信息对整个样本集进行K-L 变换(即PCA ),并将计算出的新特征方向表示在 二维平面上,考察投影到特征值最大的方向后男女样本的分布情况并用该主成分进行分类。 2. 利用类平均向量提取判别信息,选取最好的投影方向,考察投影后样本的分布情况并用 该投影方向进行分类。 3. 将上述投影和分类情况与以前做的各种分类情况比较,考察各自的特点和相互关系。 三、实验原理 设n 维随机向量T n x x x x ),,(21?=,其均值向量][x E u =,相关矩阵][T x xx E R =, 协方差矩阵]))([(T x u x u x E C --=,x 经正交变换后产生向量T n y y y y ),,(21?=。 设有标准正交变换矩阵)),,((21n t t t T T ?=,(即I T T T =) T n T n y y y x t t t x T y ),,(),,(2121?=?==,x t y T i i = (1,2,)i n = ∑=-===n i i i T t y y T y T x 1 1 (称为 x 的K-L 展开式) 取前m 项为x 的估计值1 ?m i i i x y t ==∑ 1m n ≤<其均方误差为 ∑∑+=+=∧ ∧= = --=n m i i i n m i i T y y E y E x x x x E m 1 ' 1 2 ][][)]()[()(ξ ∑∑∑+=+=+== == n m i i x i n m i i n m i i i t R t t x x E t y y E m 1 '1 ' ' 1 ' )(][)(ξ 在I T T =' 的约束条件下,要使均方误差 min )]()[()(1 ' ' →= --=∑+=∧ ∧n m i i x i t R t x x x x E m ξ
基于小波变换的语音特征参数提取
基于小波变换的语音特征参数提取 【摘要】将小波变换的多分辨率特性用于改进Mel频率倒谱系数MFCC的前端处理中,给出了一种新的语音特征参数——小波MFCC。其特点在于采用小波变换、分层FFT和频率合成代替原来MFCC中的FFT部分,使频谱分辨率提高了一倍。试验证明,小波MFCC特征参数在较大词汇量情况下,其识别率优于MFCC特征参数的结果。 【关键词】小波分析;语音识别;MFCC Abstract:The multi resolution characteristic of wavelet is used to improve the front end processing of MFCC.So,a new feature parameter wavelet MFCC is presented in this paper.It uses wavelet transform,multi degree FFT and frequency synthesis to replace original FFT of MFCC,and increases spectrum resolution by 2.The experiments demonstrate that robustness and recognition rate of wavelet MFCC feature are better than one of MFCCs in large vocabulary. Key words:wavelet transformation;speech recognition;MFCC 1.引言 在语音识别和说话人识别中,基于Mel频率的倒谱系数MFCC(mel frequency cepstrum cofficient)是将人耳的听觉感知特性和语音的产生机制相结合,与其他特征参数相比较,体现了较优越的性能,在无噪声情况下能得到较高的识别率,因此是目前使用最广泛的特征参数。但是,随着识别词汇量的增大,这种参数的识别性能急剧地下降。说明这种特征不适合大词汇量识别。 近年来,小波变换被广泛应用于语音处理中,主要包括:利用小波变换对听觉感知系统进行模拟,对语音信号去噪,进行清、浊音判断。因为小波变换的局部化性质,可以在很小的分帧长下对语音信号仍具有较高的频谱分辨率,本文将小波变换技术引入到MFCC特征参数中,来进行语音识别系统的特征提取,可以提高对辅音区的识别效果。因此,用WMFCC特征参数作为隐马尔可夫(HMM)识别网络的输入信号,识别效果明显提高。 2.MFCC特征参数 图1所示为MFCC特征参数的计算流程图。 图1 MFCC特征参数的提取 人类听觉系统对声音高低的感知与实际频率是一种非线性映射关系[1],而与Mel频率成线性关系。根据人的听觉机理来进行Mel滤波器组的频带划分,模拟不同频率下人耳对语音的感知特性。实际频率和Mel频率的转换关系用公
5.图像的频域增强及傅里叶变换
5.图像的频域增强及傅里叶变换 傅立叶变换在图像处理中有非常非常的作用。因为不仅傅立叶分析涉及图像处理的很多方而,傅立叶的改进算法,比如离散余弦变换,gabor与小波在图像处理中也有重要的分量。 印象中,傅立叶变换在图像处理以下几个话题都有重要作用: 1.图像增强与图像去噪 绝大部分噪音都是图像的高频分呈:,通过低通滤波器来滤除髙频一一噪声;边缘也是图像的髙频分量,可以通过添加髙频分量来增强原始图像的边缘; 2?图像分割Z边缘检测 提取图像高频分量 3.图像特征提取: 形状特征:傅里叶描述子 纹理特征:直接通过傅里叶系数来汁算纹理特征 英他特征:将提取的特征值进行傅里叶变换来使特征具有平移、伸缩、旋转不变性 4.图像压缩 可以直接通过傅里叶系数来压缩数据:常用的离散余弦变换是傅立叶变换的实变换:傅立叶变换傅里叶变换是将时域信号分解为不同频率的正弦信号或余弦函数叠加之和。连续情况下要求原始信号在一个周期内满足绝对可积条件。离散情况下,傅里叶变换一左存在。冈萨雷斯版<图像处理>里而的解释非常形象:一个恰当的比喻是将傅里叶变换比作一个玻璃棱镜。棱镜是可以将光分解为不同颜色的物理仪器,每个成分的颜色由波长(或频率)来决泄。傅里叶变换可以看作是数学上的棱镜,将函数基于频率分解为不同的成分。当我们考虑光时, 讨论它的光谱或频率谱。同样,傅立叶变换使我们能通过频率成分来分析一个函数。 傅立叶变换有很多优良的性质。比如线性,对称性(可以用在计算信号的傅里叶变换里而);时移性:函数在时域中的时移,对应于其在频率域中附加产生的相移,而幅度频谱则保持不变;频移性:函数在时域中乘以』wt,可以使整个频谱搬移W U这个也叫调制左理,通讯里而信号的频分复用需要用到这个特性(将不同的信号调制到不同的频段上同时传输): 卷积泄理:时域卷积等于频域乘枳:时域乘积等于频域卷积(附加一个系数)。(图像处理里而这个是个重点)信号在频率域的表现在频域中,频率越大说明原始信号变化速度越快:频率越小说明原始信号越平缓。当频率为O时,表示直流信号,没有变化。因此,频率的大小反应了信号的变化快慢。高频分疑解释信号的突变部分,而低频分量决左信号的整体形象。 在图像处理中,频域反应了图像在空域灰度变化剧烈程度,也就是图像灰度的变化速度, 也就是图
傅里叶变换公式
第2章信号分析 本章提要 信号分类 周期信号分析--傅里叶级数 非周期信号分析--傅里叶变换 脉冲函数及其性质 信号:反映研究对象状态和运动特征的物理量信号分析:从信号中提取有用信息的方法 和手段 §2-1 信号的分类 两大类:确定性信号,非确定性信号 确定性信号:给定条件下取值是确定的。 进一步分为:周期信号, 非周期信号。 非确定性信号(随机信号):给定条件下 取值是不确定的 按取值情况分类:模拟信号,离散信 号
数字信号:属于离散信号,幅值离散,并用二进制表示。 信号描述方法 时域描述 如简谐信号 频域描述 以信号的频率结构来描述信号的方法:将信号看成许多谐波(简谐信号)之和,每一个谐波称作该信号的一个频率成分,考察信号含有那些频率的谐波,以及各谐波的幅值和相角。
无终” # 傅里叶级数的三角函数展开式 (n=1, 2, 3,…) 傅立叶系数: 式中T--周期;0--基频, 0=2/T。 三角函数展开式的另一种形式: 周期信号可以看作均值与一系列谐波之和--谐波分析法 频谱图 周期信号的频谱三个特点:离散性、谐波性、收敛性 例1:求周期性非对称周期方波的傅立叶级数并画出频谱图 解:
解: 信号的基频 傅里叶系数 n次谐波的幅值和相角 最后得傅立叶级数 频谱图 幅频谱图相频谱图 二、周期信号傅里叶级数的复指数形式 欧拉公式 或 傅立叶级数的复指数形式
复数傅里叶系数的表达式 其中a n,b n的计算公式与三角函数形式相同,只是n包括全部整数。 一般c n是个复数。 因为a n是n的偶函数,b n是n的奇函数,因此# 即:实部相等,虚部相反,c n与c-n共轭。 c n的复指数形式 共轭性还可以表示为 , 即:c n与c-n模相等,相角相反。 傅立叶级数复指数也描述信号频率结构。它与三角函数形式的关系 对于n>0 (等于三角函数模的一半) (与三角函数形式中的相角相等)
小波在图像特征提取中的应用
小波理论课程设计论文题目小波在图像特征提取中的应用 专业 学号 学生 指导教师
摘要 在模式识别以及神经网络对图标的识别过程中,优化特征向量是首要的环节。本文通过二维小波在图像压缩以及分解的研究,提出了由图像生成特征向量的几个新思路,降低了特征向量的维数并有效保存原图像的信息。小波变换生成的特征向量在保存图像信息上显示了良好的优越性。这些方案在降低后续模式识别的计算量,提高识别率,改善识别系统性能方面,有良好的发展空间。 关键词:小波变换;图像特征提取;图标识别 一课题背景 在对图像的模式识别领域,特征提取与选择是一个很重要的问题。原始图像样本的特征空间维数很好,需要压缩维数以便进行分类,一种方式是特征提取,一种方式是特征选择。小波变换可以满足要求。 我在本科毕业设计是《BP神经网络对图标的识别》,其中很重要的特征提取部分,是提取一个图标图象的特征。当时采用的方法是把256*256的二值化图像矩阵转化成65536维的01向量,通过一族向量样本对神经网络的训练,得到一个训练过的网络,用它正确识别有破坏的图标。实际应用中,对于一个1/4部分完全破坏的图标的正确识别率能达到90%。 在设计中,渐渐突出而当时没有解决的问题有两个:一,这种直观的转化方式并没有有效的提取图标的特征信息。具体来说,图标的形状信息,高频边缘信息,轮廓等都没有充分利用,而只是简单的用65536个值笼统的代表图标,并没有真正的“描述”图像。这是影响识别率的一个重要的原因。二,这种处理方式的65536个输入值对于神经网络的输入来说是很庞大的,也就是说特征提取的时候并没有有效的对特征向量进行降维压缩。 本文正是在这个背景下,通过小波变换在图像压缩,图像的分解与合成中的应用的研究,寻求得到可以实现图像分类要求的特征向量的新思路和方法。
KL变换
1. 主分量分析(PCA )、K-L 变换(Hotelling 变换) 一般而言,这一方法的目的是寻找任意统计分布的数据集合之主要分量的子集。相应的基向量组满足正交性且由它定义的子空间最优地考虑了数据的相关性。将原始数据集合变换到主分量空间使单一数据样本的互相关性(cross-correlation)降低到最低点。 设s j x j ,...,1:=是N 维向量的数据集合,m 是其均值向量: 有了特征向量集合,任何数据x 可以投影到特征空间(以特征向量为基向量)中的表示: 相反地,任何数据x 可以表示成如下的线性组合形式: 如果用A 代表以特征向量为列向量构成的矩阵,则A T 定义了一个线性变换: 上述去相关的主分量分析方法可以用于降低数据的维数。通过略去对应于若干较小特征值的特征向量来给y 降维。例如,丢弃底下N-M 行得到N M ?的矩阵B , k k s j T j j x j j j s j j u d d s C m x d d x s m 向量及满足下列条件的特征特征值求出其从大到小排列的 协方差矩阵是:是:差别向量λ∑∑=== -== 1 1 1 1?? ?≠===k l k l u u k l k T l ,0,1,δT N T k k y y y y m x u y ),...,,(,)(21=-=∑=+=s k k k u y m x 1 ?? ? ? ? ?????==+=-=N x T y T A C A C A Ay m x m x A y λλ00() (1 : 变换后的协方差矩阵为是正交矩阵)
并为简单起见假定均值m=0,则有: 它只是被舍弃的特征向量所对应的特征值的和。通常,特征值幅度差别很大,忽略一些较小的值不会引起很大的误差。 上述方法是图象数据压缩的数学基础之一,通常被称为Principal Component Analysis (PCA)或Karhunen-Loeve (K-L)变换。 K-L 变换的核心过程是计算特征值和特征向量,有很多不同的数值计算方法。 一种常采用的方法是根据如下的推导: 由于通常s< 简述信号特征提取使用小波变换的优点 摘要:通过对小波变换所进行的理论分析和计算机模拟发现,利用小波变换具有的高低频分离的特点,可在不丢失原信号重要信息成分的前提下,将原光谱信号的边缘部分进行滤化处理,消除了噪音信息,重构出更加清晰的光谱特征图形,从而提高了信号的清晰度,为信号的预处理提供了更加方便的条件。该信号特征提取的方法,与傅氏变换相比较,具有多项明显的优点,在实际工程应用中具有重要的意义。 关键词小波变换傅氏变换;信号 一、引言 在当今科技飞速发展的信息时代,信息资源中的信号应用日益广泛,信号的结构越来越复杂,为了更加清楚地分析和研究实际工程信号的有用信息,对信号进行预处理是至关重要的。例如,对于环境的监测,其中对空气成分的检测已经成为必不可少的环节,其方法是将空气中的某一成分(例如丁烯)进行特征的提取,提取的信息中仍然会存在着由一系列高频信号构成的噪音信号。由于这些边缘部分的存在,使原信号的基本特征在光谱信号中不能完全清晰地呈现,导致某些信息的细微环节部分难以识别,致使研究目的无法实现。 本文通过对小波变换所进行的理论分析和计算机模拟发现,利用小波变换具有的高低频分离的特点,可在不丢失原信号重要信息成分的前提下,将原光谱信号的边缘部分进行滤化处理,消除了噪音信息,重构出更加清晰的光谱特征图形,从而提高了信号的清晰度,为信号的预处理提供了更加方便的条件。 二、傅氏变换与小波变换 近年来,小渡变换已经成为对信号、图像等进行分析不可或缺的实用工具之一,其实质是对原始信号的滤波过程。与傅氏变换相比较,小波变换的优势在于,对分析信号可进行任意的放大平移并对其特征进行提取。对复杂信号作小波变换,进行多分辨率分析,在信号图象分析领域已占据着相当重要的地位。 已有的科研成果表明,物质的荧光光谱取决于物质的原子分子结构,所以不同的物质具有不同的荧光光谱。非线性荧光光谱是利用大功率超短激光脉冲和气体的非线性作用得到的;对于这种非线性荧光光谱的研究,主要集中在形成原理、光谱强度等方面。①由于采用传统的光谱分析方法分析该光谱存在很大的困难,所以这方面的研究还处于刚刚起步的状态。笔者发现,由此得到的非线性荧光光谱与超短脉冲激光器的波长以及强度无关,只与气体的分子原子结构有关;对于混合气体,则与其组成成分(包括浓度的不同)有关,因而可以用来进行混合气体成分识别。含有不同成分的混合气体的非线性荧光光谱虽然不同,但不同的气体在同一波段上可能有很大成分的交叉重叠,因此很难像吸收光谱那样找出每种气体特有的非线性荧光光谱,然后利用最小二乘法进行拟合而加以识别。神经网络对于不能精确识别或用数学公式近似加以描述的模式识别具有非常好的识别能力和推广性。对此,已有不少关于气体传感器(电子鼻) 联合神经网络识别分析气体组成成分的报道,这些方法的一个共同特点,就是必须对检测的气体进行取 图像处理中的傅立叶变换 众所周至,傅立叶变换可以将连续或离散的函数序列从空域映射到频域上,因此,傅立叶变换是信息与信号学中不可获缺的强大工具。但是,由于傅立叶变换在学习表示已经很熟悉了,撇开傅立叶变换本身和其在其他领域的应用不谈,只谈图像傅立叶变换前后的对应关系。我们知道傅立叶变换以前,图像(未压缩的位图)是由对在连续空间(现实空间)上的采样得到一系列点的集合,我们习惯用一个二维矩阵表示空间上各点,则图像可由z=f(x,y)来表示。由于空间是三维的,图像是二维的,因此空间中物体在另一个维度上的关系就由梯度来表示时是以一大堆公式的形式给出的,因此很多人(包括我在内)往往在做了一大堆习题掌握了变换的数学表示却对其变换后的物理意义一无所知,尤其是自学的时候更是晕头转向。 这里假设大家对傅立叶变换的数学,这样我们可以通过观察图像得知物体在三维空间中的对应关系。为什么要提梯度?因为实际上对图像进行二维傅立叶变换得到频谱图,就是图像梯度的分布图,当然频谱图上的各点与图像上各点并不存在一一对应的关系,即使在不移频的情况下也是没有。傅立叶频谱图上我们看到的明暗不一的亮点,实际上图像上某一点与邻域点差异的强弱,即梯度的大小,也即该点的频率的大小(可以这么理解,图像中的低频部分指低梯度的点,高频部分相反)。一般来讲,梯度大则该点的亮度强,否则该点亮度弱。这样通过观察傅立叶变换后的频谱图,也叫功率图(看看频谱图的各点的计算公式就知道为什么叫功率图了:)),我们首先就可以看出,图像的能量分布,如果频谱图中暗的点数更多,那么实际图像是比较柔和的(因为各点与邻域差异都不大,梯度相对较小),反之,如果频谱图中亮的点数多,那么实际图像一定是尖锐的,边界分明且边界两边像素差异较大的。对频谱移频到原点以后,可以看出图像的频率分布是以原点为圆心,对称分布的。将频谱移频到圆心除了可以清晰地看出图像频率分布以外,还有一个好处,它可以分离出有周期性规律的干扰信号,比如正玄(sin的正玄,找不到这个字,郁闷)干扰,一副带有正玄干扰,移频到原点的频谱图上可以看出除了中心以外还存在以某一点为中心,对称分布的亮点集合,这个集合就是干扰噪音产生的,这时可以很直观的通过在该位置放置带阻滤波器消除干扰。 傅立叶变换在图像处理中有非常非常的作用。因为不仅傅立叶分析涉及图像处理的很多方面,傅立叶的改进算法, 比如离散余弦变换,gabor与小波在图像处理中也有重要的分量。 傅立叶变换在图像处理以下几个话题都有重要作用: 1.图像增强与图像去噪 绝大部分噪音都是图像的高频分量,通过低通滤波器来滤除高频——噪声; 边缘也是图像的高频分量,可以通过添加高频分量来增强原始图像的边缘; Karhunen-Loeve 变换的应用 摘要:本文对Karhunen-Loeve 变换的原理进行了说明,重点分析了K-L 变换的性质,结合K-L 变换的性质,对K-L 变换的具体应用进行了展示。利用K-L 变换在人脸识别、遥感图像特征提取、地震波噪声抑制、数字图像压缩、语音信号增强中的具体利用,深入总结了K-L 变换在模式识别、噪声抑制和数据压缩领域的重要性。 关键字: Karhunen-Loeve 变换 K-L 变换 K-L 展开 1、 Karhunen-Loeve 变换定义 1.1Karhunen-Loeve 变换的提出 在模式识别和图像处理等现实问题中,需要解决的一个主要的问题就是降维,通常我们选择的特征彼此相关,而在识别这些特征时,数据量大且效率低下。如果我们能减少特征的数量,即减少特征空间的维数,那么我们将以更少的存储和计算复杂度获得更好的准确性。于是我们需要一种合理的综合性方法,使得原本相关的特征转化为彼此不相关,并在特征量的个数减少的同时,尽量不损失或者稍损失原特征中所包含的信息。Karhunen-Loeve 变换也常称为主成分变换(PCA)或霍特林变换,就可以简化大维数的数据集合,而且它的协方差矩阵除对角线以外的元素都是零,消除了数据之间的相关性。所以可以用于信息压缩、图像处理、模式识别等应用中。 Karhunen-Loeve 变换,是以矢量信号X 的协方差矩阵Ф的归一化正交特征矢量q 所构成的正交矩阵Q ,来对该矢量信号X 做正交变换Y=QX ,则称此变换为K-L 变换(K-LT 或KLT ),K-LT 是Karhuner-Loeve Transform 的简称,有的文献资料也写作KLT 。可见,要实现KLT ,首先要从信号求出其协方差矩阵Ф,再由Ф求出正交矩阵Q 。Ф的求法与自相关矩阵求法类似。 1.2Karhunen-Loeve 展开及其性质 设零均值平稳随机过程u(n)构成的M 维随机向量为u(n),相应的相关矩阵为R ,则向量u(n)可以表示为R 的归一化特征向量M 21q ,q ,q 的线性组合,即i M i i q c n u ∑==1)(,此式称为u(n)的Karhunen-Loeve 展开式,展开式的系数i c 是由内积 )(c i n u q H i =M ,1,2,i =定义的随机变量,且有{}0E =i c , {}???≠==l i l i c c i l i ,0,E *λ。 K-L 展开式具有以下四个性质:简述信号特征提取使用小波变换的优点(1)
图像处理 傅立叶变换
现代数字信号处理及其应用论文——KL变换的应用