电力拖动自动控制系统系统课后问题详解

习 题 二
2.2 系统的调速围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少?
解:10000.02(100.98) 2.04(1)n n s
n rpm D s ?==??=-
系统允许的静态速降为2.04rpm 。
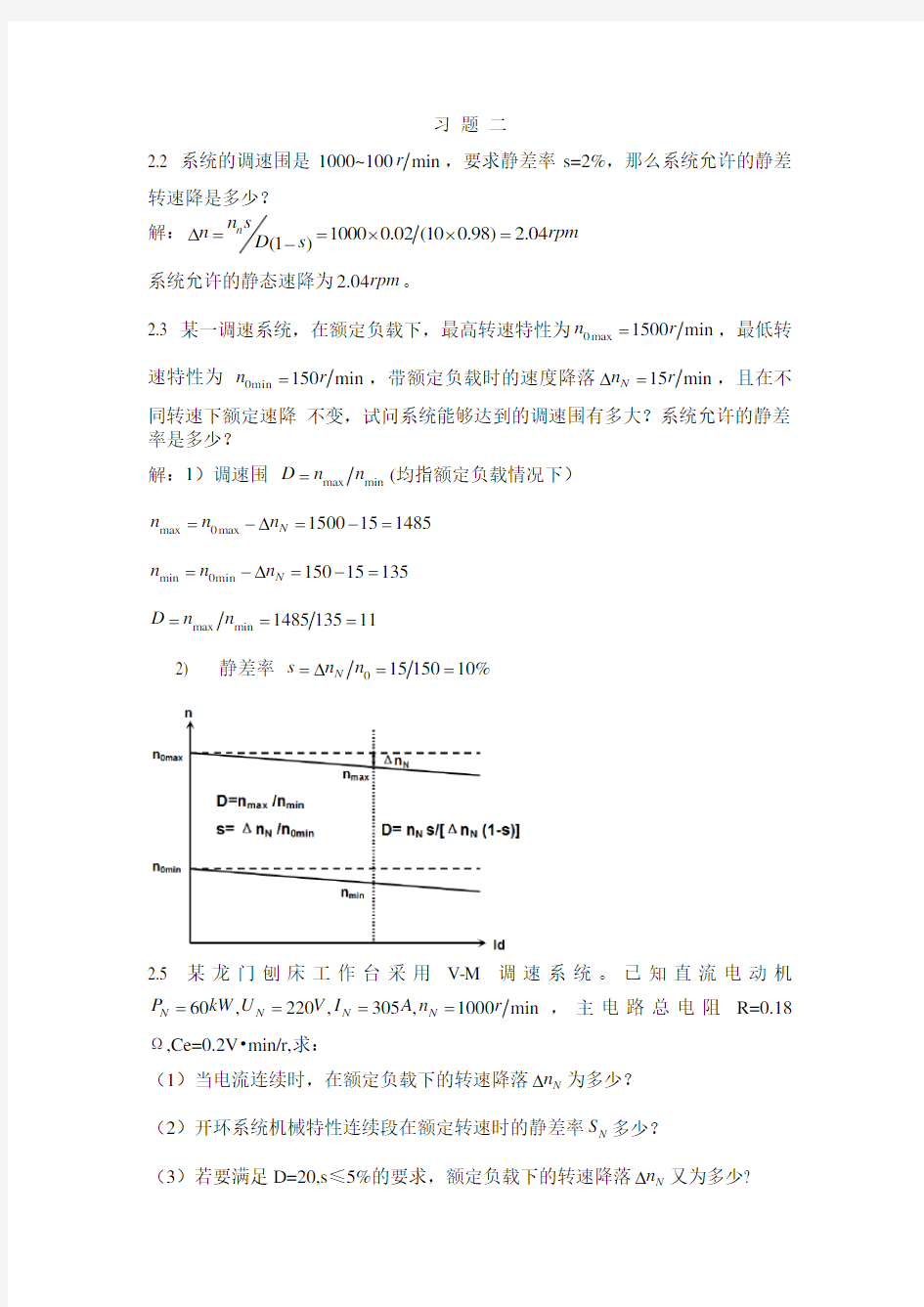
2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为 0min 150min n r =,带额定负载时的速度降落15min N n r ?=,且在不同转速下额定速降 不变,试问系统能够达到的调速围有多大?系统允许的静差率是多少?
解:1)调速围 max min D n n =(均指额定负载情况下)
max 0max 1500151485N n n n =-?=-= min 0min 15015135N n n n =-?=-= max min 148513511D n n ===
2) 静差率 01515010%N s n n =?==
2.5 某龙门刨床工作台采用V-M 调速系统。已知直流电动机
60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18
Ω,Ce=0.2V ?min/r,求:
(1)当电流连续时,在额定负载下的转速降落N n ?为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少?
(3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ?又为多少?
解:(1)3050.18274.5/min N N n I R r ?=?=?= (2) 0274.5(1000274.5)21.5%N N S n n =?=+=
(3) [(1)]10000.05[200.95] 2.63/min N n n S D s r ?=-=??=
2.7 某闭环调速系统的调速围是1500r/min~150r/min ,要求系统的静差率5%s ≤,那么系统允许的静态速降是多少?如果开环系统的静态速降是100r/min ,则闭环系统的开环放大倍数应有多大? 解: 1)()s n s n D N N -?=1/
1015002%/98%N n =???
15002%/98%10 3.06/min N n r ?=??=
2.9 有一V-M 调速系统:电动机参数P N =2.2kW, U N =220V , I N =12.5A, n N =1500 r/min ,电枢电阻R a =1.5Ω,电枢回路电抗器电阻RL=0.8Ω,整流装置阻R rec =1.0Ω,触发整流环节的放大倍数K s =35。要求系统满足调速围D=20,静差率S<=10%。 (1)计算开环系统的静态速降Δn op 和调速要求所允许的闭环静态速降Δn cl 。 (2)采用转速负反馈组成闭环系统,试画出系统的原理图和静态结构图。 (3)调整该系统参数,使当U n *=15V 时,I d =I N ,n=n N ,则转速负反馈系数 α应该是多少?
(4)计算放大器所需的放大倍数。 解:(1)
()()/22012.5 1.5/1500201.25/15000.134min/N N a e
e n U I R C C V r
=-??=-?==
()//12.5 3.3/0.134307.836/min
N N e
op N e n U I R C n I R C r ∑∑=-???=?=?=
()()/1150010%/20*90%8.33/min N N n n s D s r ?=-=?=()
所以,min /33.8r n cl =? (2)
(3)(4)()()()()[]
()()[]K C R I K KU K C R I U K K n e d n e d n s p +-+=+-=*
*1/1/1/α
()/1307.836/8.33135.955op cl K n n =??-=-=
()()()150035.95515/135.95512.5 3.3/0.134135.955α??=??+?-?+????
r V min/0096.0=?α
可以求得,*35.955*0.134
14.34*35*0.0096
e p s K C K K α=
== 也可以用粗略算法:
n U U n n
α=≈*
,01.01500
15
*===n U n α 2.12 有一个晶闸-电动机调速系统,已知:电动机:kW P N 8.2=,V U N 220=,
A I N 6.15=,1500=N n r/min ,a R =1.5Ω,整流装置阻rec R =1Ω, 电枢回路电抗器
电阻L R =0.8Ω, 触发整流环节的放大倍数35=s K 。 (1)系统开环工作时,试计算调速围30=D 时的静差率s 值。
(2)当30=D ,%10=s 时,计算系统允许的稳态速降。
(3)如组成转速负反馈有静差调速系统,要求30=D ,%10=s ,在V U n 10*
=时
N d I I =,N n n =,计算转速负反馈系数α和放大器放大系数p K 。
解:
()r V C e m in/1311.01500/5.16.15220=?-=
(1)
()min 0min /15.6 3.3/0.1311392.68/min 1500/3050
/392.68/392.685088.7%
op N e op n I R C r n s n n ∑?=?=?====??=+=
(2)
()min
/56.59.0/550/1.0r n n n ==?+??=
(3)
()()??
??
?=+-+=∑e s p e d e n s p C K K K K C I R K C U K K n /1/1/*α ()()()()
()????
?=-=-??=+-+=∑5
.52156.5/48.2971/1/6.151/1500*cl op e e n s p n n K K C R K C U K K 2.13旋转编码器光栅数1024,倍频系数4,高频时钟脉冲频率MHz 1f 0=,旋转编码器输出的脉冲个数和高频时钟脉冲个数均采用16位计数器,M 法测速时间为0.01s ,求转速min /r 1500n =和min /r 150n =时的测速分辨率和误差率最大值。 解:
(1)M 法:分辨率min /465.101
.04102460
60r ZT Q c =??==
最大误差率:→=
c
ZT M n 1
60 min /1500r n =时,102460
01
.0102441500601=???==
c nZT M min /150r n =时,4.1026001.010*********=???==
c nZT M min /1500r 时,%098.0%1001024
1%1001%1max =?=?=
M δ
min /150r 时,%98.0%1004
.1021%1001%1max =?=?=M δ 可见M 法适合高速。 (2)T 法: 分辨率:
min /1500r n =时,min /171150041025101601500410246062
02r Zn f Zn Q =??-????=-=
min /150r n =时,min /55.1150410241016015041024606
2
02r Zn f Zn Q =??-????=-= 最大误差率:2060ZM f n =
,Zn
f M 0
260=, 当min /1500r n =时,77.915004102410606
2=???=
M 当min /150r n =时,7.97150
4102410606
2=???=
M min /1500r n =时,%4.11%1001
77.91
%10011%2max =?-=
?-=
M δ
min /150r n =时,%1%1001
7.971
%1001
1
%2max =?-=
?-=M δ
可见T 法适合低速
习题三
3.1双闭环调速系统的ASR 和ACR 均为PI 调节器,设系统最大给定电压*
nm U =15V ,
N n =1500r/min ,N I =20A ,电流过载倍数为2,电枢回路总电阻R =2Ω,s K =20,
e C =0.127V ·min/r ,求:(1)当系统稳定运行在*n U =5V ,dL I =10A 时,系统的n 、
n U 、*i U 、i U 和c U 各为多少?(2)当电动机负载过大而堵转时,*i U 和c U 各为
多少? 解:(1)
*
**
**0*/15/15000.01/55,
5000.01/150.375/400.375*10 3.750.127*50010*2
4.17520500,5, 3.75,nm N n
n
im dm i d i d dL e N dL C s s s n i i c U n V rpm V rpm
U V
U V n rpm
V rpm
U V V A
I A
U I V U U E I R C n I R U V K K K n rpm U V U U V U αα
ββ=====
=
========+++=========当转速即
4.175v
=
(2)堵转时,V I U dm i 15*==β,
()040*2420
e d d dm c s s s C n I R U I R U V K K K +=====
3.2 在转速、电流双闭环调速系统中,两个调节器ASR ,ACR 均采用PI 调节器。已知参数:电动机:N P =3.7kW ,N U =220V ,N I =20A ,N n =1000 r/min ,电枢回
路总电阻R =1.5Ω,设cm im nm
U U U ==*
* =8V ,电枢回路最大电流dm I =40A,电力电子变换器的放大系数s K =40。试求:
(1)电流反馈系数β和转速反馈系数α。
(2)当电动机在最高转速发生堵转时的,0d U c i i U U U ,,*值。
解:1)*
*880.2/0.008/401000im nm dm N U V
U V V A V rpm I A
n rpm
βα=
=====
2) 040*1.560d dl e N dl U E I R C n I R A V ∑
∑
=+=+=Ω=
这时:
*8,0n n U V U ==,ASR 处于饱和,输出最大电流给定值。
*8,8,i i U V U V ==
06040 1.5C d S U U K V ===
3.3 在转速、电流双闭环调速系统中,调节器ASR ,ACR 均采用PI 调节器。当
ASR 输出达到*im U =8V 时,主电路电流达到最大电流80A 。当负载电流由40A 增
加到70A 时,试问:(1)*i U 应如何变化?(2)c U 应如何变化?(3)c U 值由哪
些条件决定?
解: 1) *8
0.1/
80
im
dm
U V
V A
I A
β===
因此当电流从40A?70A时,*
i
U应从4V?7V变化。
2) C
U要有所增加。
3)
C
U取决于电机速度和负载大小。因为
d dl
e N dl
U E I R C n I R
∑∑
=+=+
()
0e d
d
c
s s
C n I R
U
U
K K
+
==
3.5 某反馈控制系统已校正成典型I型系统。已知时间常数T=0.1s, 要求阶跃响应超调量σ≤10%。
(1)系统的开环增益。
(2)计算过渡过程时间
s
t和上升时间r t;
(3)绘出开环对数幅频特性。如果要求上升时间
r
t<0.25s, 则K=?,σ%=? 解:取0.69,0.6,%9.5%
KTξσ
===
(1)系统开环增益:0.69/0.69/0.1 6.9(1/)
K T s
===
(2)上升时间 3.30.33
r
t T S
==
过度过程时间:
3
660.10.6
s
n
t T s
ξω
≈==?=
(3)
如要求0.25
r
t s
<,查表3-1则应取1,0.5
KTξ
==, 2.4 2.4*0.10.24
r
t T s
===
这时1/10
K T
==,超调量=16.3%。
习题六
6.1 按磁动势等效、功率相等的原则,三相坐标系变换到两相静止坐标系的变换矩阵为
??????
???
??
?-
-
-=2323021211322
/3C 现有三相正弦对称电流s()A m i I co t ω=,2s()3B m i I co t πω=-
,2cos()3
C m i I t π
ω=+,求变换后两相静止坐标系中的电流αs i 和βs i ,分析两相电流的基本特征与三相电流的关系。
解:两相静止坐标系中的电流
111
112222
00222230020A A
B C s B s C B C A B C i i i i i i i i i i αβ????----???????==?????????--???????
???=
?
???
其中,0A B C i i i ++=
2222()()()()33332333
s()0
02
2
22s()s()]0333cos()2
[]223s()2
[A
s m s B C m
j t j t j t j t m
j co t i i i co t co t t e e e e co t e e αβππππ
ωωωωπωππωωωω---+-+-???
???????==??????--+?????
??????=?++?
-??
=
-2223332233
]
223s()
2)23s()s()2
2sin()sin()sin()3j j j j t j t m j t
j t
j j m m
e e e e co t e e e e co t co t t t πππ
ωωππ
ωωωωωπωω----???????-?+??
?
?
????=-??
-??????????==
?????
???
相电流的相位差
2
π。
6.2 两相静止坐标系到两相旋转坐标系的变换阵为
??
????-=????cos sin sin cos 2/2r
s C 将上题中的两相静止坐标系中的电流αs i 和βs i 变换到两相旋转坐标系中的电流
sd i 和sq i ,坐标系旋转速度
1ω?
=dt
d 。分析当ωω=1时,sd i 和sq i 的基本特征,电流矢量幅值2
2sq
sd s i i i +=与三相电流幅值m I 的关系,其中ω是三相电源角频率。 解:两相静止坐标系中的电流
s()sin()s m s i co t i t αβωω????=????????
两相旋转坐标系中的电流
cos sin cos sin s()sin cos sin cos sin()cos s()sin sin()cos()cos sin()sin s()sin()sd s m sq s m m i i co t i i t co t t t t co t t αβ????ω????ω?ω?ωω??ω?ωω???????????==??????????--?
?????????+-????==????--????
当
1ω?
=dt
d 时,1t ?ω=,两相旋转坐标系中的电流
cos()sin()0sd m m sq i t i t ω?ω??
-?????==?????-????
????
电流矢量幅值
s sd m i i ==