机器人技术报告

第1章简介
主从微创手术机器人的控制部分主要由控制台系统、操作臀系统、主操作手、从操作手等构成。手术时外科医师可坐在远离手术台的控制台前,借助三维视觉,双手控制主操作手,手部动作传达到机械臀及手术器械,完成手术操作。这种主从控制的工作方式增加了操作的精确性和平稳性。控制系统结构图如下:
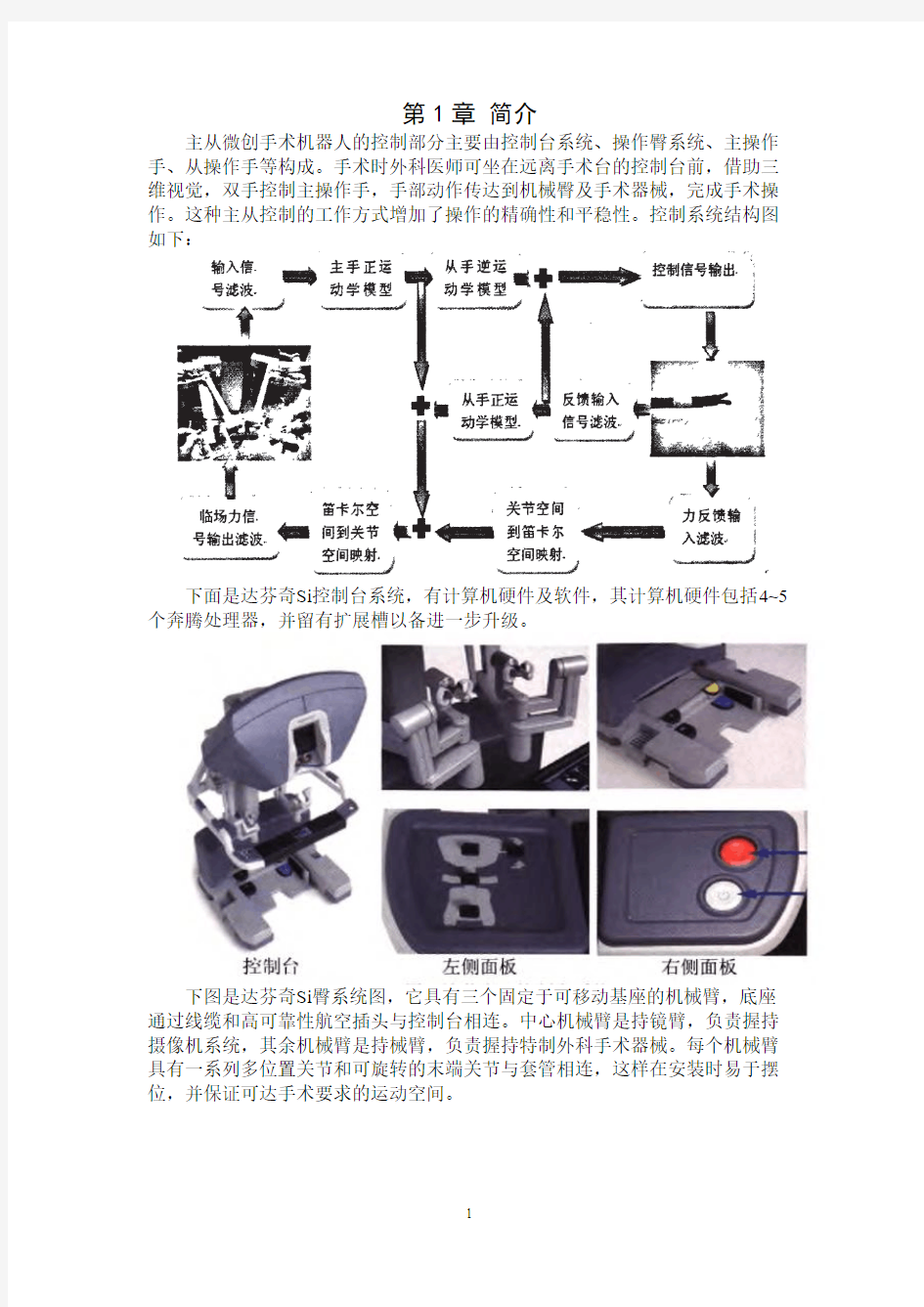
下面是达芬奇Si控制台系统,有计算机硬件及软件,其计算机硬件包括4~5个奔腾处理器,并留有扩展槽以备进一步升级。
下图是达芬奇Si臀系统图,它具有三个固定于可移动基座的机械臂,底座通过线缆和高可靠性航空插头与控制台相连。中心机械臂是持镜臂,负责握持摄像机系统,其余机械臂是持械臂,负责握持特制外科手术器械。每个机械臂具有一系列多位置关节和可旋转的末端关节与套管相连,这样在安装时易于摆位,并保证可达手术要求的运动空间。
第2章主从操作手的构成和运动控制
2.1主操作手的构成和运动控制
主操作手是医生直接操纵的部分,主要由两方面功能,第一是提供整个系统的输入信号,控制从操作手的动作;第二传递力反馈信息,给医生提供手术工具末端的力感受,提高手术的质量。主操作手分为左右两只,对应着医生的左右手。每只主操作手由七个自由度组成,且均为转动关节。
主操作手采用串联结构,具有较大的工作空间和高度的灵活性。主操作手在所有方向上可实现自由独立运动,允许对器械和摄像机进行直观控制。
主操作手是由两套结构相同的关节式操作臂构成,各转动关节配有相对式数字编码器,数字编码器能发出正交的编码脉冲,脉冲的速度与转动速度成正比。位置关节上装有力矩电机,能在系统初始化时提供位置控制,保证系统上电原点,在系统正常运行时切换为电流模式,提供临场力感觉。机器人从操作手各关节采用伺服电机驱动。由于主操作臂和从操作臂在系统设计时为满足末端工具的体积指标,在结构上是异构型映射,故对控制器的数据运算功能提供了较高的要求。
主手从外部接受力信号,经过码盘采集,在主操作臂控制器内进行输入信号滤波,完成主手正运动学模型计算得到主操作臂末端空间位姿,传入从控制器由位置,经速度,电流闭环完成位置控制。力反馈部分在从操作臂上的应变片采集放大得到力信息,综合位置信息共同控制主操作臂的力感觉输出。
针对主从手应用不同,主从手安装的执行器件和传感反馈器件也有差别。直流电机在从操作臂主要提供位置控制功能,在主臂还是力反馈的执行器。多圈电位器是用来测量关节旋转的角度值,相对式码盘是测关节运动的相对值,无励磁刹车是通过机械固联为末端提供稳定的支撑,限位开关有两个作用,能提供系统的初始点并且可以对系统进行保护,在收到电气限位信号时电机应停止该方向的运动执行命令保证机械结构安全。
2.2从操作手的构成和运动控制
从操作手包括被动部分和主动部分。
2.2.1从操作手的被动部分
从操作手的被动部分,主要用于手术前对机器人进行快速定位。从操作臂的整个被动部分由一个调节机器人高度的滑动关节,和5个转动关节组成,共六个自由度。其中滑动关节由交流伺服电机驱动,由专门控制单元实现。转动关节处装配有无励磁刹车和电位器,两者为同轴装配,分别用于锁死关节和提供关节的角度信息。同时为了降低支架对扭矩的要求,在输入轴及无励磁刹车之间加入增速机。
从操作手的被动部分动作原理为:正常状态下,各关节锁死;需要进行调整时,医生通过开关量(按钮)的控制,使被动支架各关节通电,被动部分关节内的无励磁刹车松开,通过手动进行调整;此外,手术机器人的控制器除需要主动环节各关节的位置外,还需要各被动关节的位置量,用以实现立体视觉,因此在各被动关节内都装有电位器来记录各关节的绝对位置信息。
2.2.2从操作手的主动部分
从操作手的主动部分由大臂部分和小臂部分组成。操作系统的大臂部分主要是为了确定手术工具末端的位置。大臂部分由三个自由度组成,分别由控制大臂偏转角度的旋转关节,控制前后伸缩的滑动关节,以及控制上下滑动的关节组成。关节处安装有驱动电机,需要工作于速度模式,以实时跟随主操作手末端的位置。同时在各个关节安装多圈电位器,用于读取初始的大臂各关节角。为了安全考虑,在关节的机械限位处,安装接近开关,防止关节运动超出合理范围。
小臂部分由小手支撑体和小手工具组成。小手部分是直接进入病患体内进行手术工作的实体。它是完成医生手术动作的关键部分,手术中诸如切割,缝合等动作都与其密切相关,直接决定着手术的成败和质量。
小手部分具有四个自由度,分别是腕关节的俯仰,腕关节摇摆,工具末端(如剪子)的摇摆,还有工具末端的开合。四个自由度由四个电机驱动完成整个运动需求。电机和自由度之间存在耦合,需要解耦完成。
第3章主从微创手术机器人双向控制方法
3.1引言
基于对主从机器人控制系统的动力学分析,研究了借助力觉临场感技术实现主从医疗机器人遥操作的控制理论和设计方法。在力和运动的双向控制中采用了新型控制方案,从理论上分析了该方案的可行性,显示了临场感技术在增强人机交互能力方面的优越性。
力临场感技术是交互技术的核心。它一方面将本地操作者的位置和运动信息作为控制指令传递给远地的机器人,另一方面将远地机器人感知到的环境信息以及机器人和环境的相互作用信息实时地反馈给本地操作者,使操作者产生身临其境的感觉,机器人仿佛是操作者肢体在远地的延伸,从而操作者能够真实地感受到机器人和环境地交互状态,正确地决策,有效地控制机器人完成复杂的任务。将力觉临场感技术应用于主从式医疗机器人是目前的研究热点之一,它通过力觉、触觉的实时反馈,使操作者产生身临其境的感觉,从而提高手术的成功率,缩短手术时间。
双向控制是指主手和从手间的运动和力觉信息的交互反馈控制,早期的遥控机器人系统采用双向位置反馈来实现力觉临场感。基于传感器技术的提高,使我们能够采用高性能的腕力传感器实现主从手间的双向力觉反馈,为采用更
先进的控制方法进一步提高遥操作性能提供了基础。
3.2 现有力反馈双向控制方法
力觉临场感操作医疗机器人系统的结构,如图1 所示。它由操作者、主操作手(简称主手)、通讯环节、从操作手(简称从手)和环境构成。操作者的任务和动作指令通过主机械手、通讯环节和机械手作用于环境,而环境对从机械手的作用及环境信息则经过上述环节反向传输到操作者手部。通常采用双向力反馈遥操作系统实现力觉临场感。国内外学者对于各类型的控制方法进行了研究。目前常用的控制方法主要包括:位置伺服型、力反馈型、力反馈伺服型、力-位置综合型等。各种控制方法分别采用主从手两侧位置和力信息的不同组合,构成不同的控制算法,从而实现从手对主手位置的跟随,并对主手驱动机构的力进行控制,实现力觉反馈。研究表明,适当的控制方法可以有效地抑制系统内动力学干扰。
位置伺服型通过主、从手的位置偏差进行力觉传递,不需要力检测装置,结构简单。但是,如果不补偿惯性力和摩擦力,对于自重、摩擦力较大的主手,偏差信号将不精确。因此,不适于重负荷、大功率操作机。
力反馈型将从手上的力/力矩直接反馈给主手,适合于重负荷,大功率场合。但是,当从手自重很大,即使在从手没有负载的情况下,对主手的操作很困难,容易造成操作者疲劳。力反馈伺服型在从手启动的同时,主手也根据自重产生的惯性力矩开始运转。因此,在从手没有负载时,主手感觉不到从手惯性力矩的反作用,主手操作较轻松自如。
力-位置综合型能较好反映从手受力情况,当外负载不变时,反馈力随位置偏差的减小而减小。主手反馈力能反映从手端力的变化。但是,当从手自重很大,存在力反馈型同样的问题。
3.3 新型双向力反馈控制系统的动力学模型
在上述分析的基础上,采用邓乐等提出的一种新的控制方法来设计医疗机器人主从双向控制系统,如图2 所示。该方法主要特征是从手由主、从手之间的力偏差和位置偏差控制,主手由二者的力偏差控制,既保证从手的控制精度,又提高了操作系统的安全性。
下面根据该方法的工作原理,建立双向力反馈系统的动力学模型。
主手的动力学方程和控制策略为:
式中:Fo—操作者施加给主手的操纵力向量;
Fm—主手臂上力传感器所受的力向量;
Fs—从手臂上力传感器所受的力向量;
τm—驱动主手的力向量;
Mm—主手质量矩阵;
Bm—主手阻尼矩阵;
Xm—主手位置向量;
Kf—力增益矩阵。
从手的动力学方程和控制策略为:
式中:Fe—从手与环境之间的作用力向量;τs—驱动从手的力向量;Ms—从手质量矩阵;Bs—从手阻尼矩阵;Xs—从手位置向量;Kv—速度增益矩阵;Kp —位置增益矩阵。
对于环境有:
式中:Me—环境质量矩阵;
Be—环境阻尼矩阵;
Xe—环境位置向量;
Ke—环境刚度矩阵。
对于通讯环节,假设T1 为前向传输时延,T2 为反向时延,则有:
式中:Gx—位置控制器运算函数;
Gf—力控制器运算函数。
对于上述这种控制策略,当从手自由运动时,系统为开环位置控制,当接触病人开始手术操作时,力控制环闭合。考虑主从侧都采用简便有效的PID 控制,当采用积分控制时,相当于在复平面[S]的左半平面加入一个实极点,虽然可以改善力反馈的稳态精度,但降低了系统的稳态裕度,鲁棒性差,对机器人的非线性动力学特性更为敏感,易产生超调和振荡,不利于操作者的临场感。对于比例控制,加大比例增益可以减小稳态误差,改善系统性能,增加系统的带宽,加快系统的响应速度,减小了过渡过程时间,随着比例增益的提高,两条根轨迹将进入[S]平面的正半平面,系统将失稳。因此,选择适当的控制器增益,就是在系统响应性能和稳定性之间的折衷。物体的刚度的变化也对系统的稳定性和性能具有明显的影响,过高的物体刚度也会使系统变得不稳定。微分控制能够预测偏差,产生超前的校正作用,它有助于减少超调,克服振荡,使系统趣于稳定,并能加快系统的动作速度,减少调整时间,从而改善系统的动态性能,但由于存在传感器噪声,微分作用不宜过大。通过以上分析,这里采用PD 控制。
以上从理论上分析了新型主从双向控制方法应用在医疗机器人中的可行性,建立并分析了这种控制方法的动力学模型。通过分析得出控制方法的各个参数、主从手的结构参数以及时延的大小之间存在互相制约的关系。在主手结构已经确定的情况下,通过对PD 控制器参数的合理配置可以获得理想的透明性。
3.4主从手坐标变换
主手的结构与从手相对应,自由度数目和运动耦合方式相同;但是,由于主从手之间运动比率的存在,不能直接通过主手各关节的运动参数信号来控制从手的各个关节的运动量,必须经过坐标变换后才能正确控制。下面根据主从手各关节的对应关系和运动范围来建立这个变换矩阵。主从手的自由度和运动形式相同,所以建立的坐标系也相同。
主手关节参数可表示为
从手关节参数可表示为
式中分别代表从手的3个转动参数;:代表轴向平动参数;
分别代表主手的3个转动参数;:代表轴向平动参数。
通过设定主从手之间运动传动比率,可知主从手之间的传递矩阵
而B=TA,即有
第4章主从微创手术机器人手术时的机械震颤
4.1 震颤的产生
微创外科手术机器人在提高外科手术质量中发挥着举足轻重的作用,对手术操作精度和稳定性要求极其之高。尽管如此,当前对于一些需要操作者手部直接介入的微创外科手术,由于操作者手部存在不等程度的震颤,使得手术过程中操作者的实际输入信息与期望输入信息存在一定的偏差,降低了手术的精度,影响了手术的质量。
相关研究表明震颤受多方面因素的影响(例如:操作环境、身体状况以及人类神经系统等),并具有非线性、随机性、时变等复杂特征,因此难以用数学模型精确地将其刻画。尽管如此,震颤表现出的特征存在一定的共性(例如:生理震颤的振荡幅度较小,抖动频率主要集中在8Hz~12Hz频段),因此为研究震颤指明了方向。震颤作为一种叠加在期望力矩上的随机的类周期摄动,给具有高标准要求的微创外科手术带来了不容忽略的影响。对于以五官科微创手术为代表的多自由度主从式微创手术机器人,震颤所带来的影响将随自由度数目的增加而扩大,因为自由度数目的增加使得操作臂的工作空间变大,从而增大了震颤敏感度。另外,对于以内窥镜微创手术为代表的主从异构型微创手术机器人,主从操作臂结构间的异构导致机器人系统的运动学和动力学特征变得更加复杂,从而使得震颤特征在主从操作臂位姿转换时得以放大或扭曲,因此更加难以描述和控制震颤,微创手术的质量也更难以保证。
4.2 除震颤的措施
首先,低通滤波法可以使震颤信号得到抑制,但其有效性是建立在使用一个固定的频率阀值对震颤信号和手术信号加以区分,这在一定程度上造成手术信息的丢失和震颤信息的保留,以至无法准确地滤除震颤信息。该方法简单易于实现,在精度要求不高的情况下可以有效地滤除部分震颤信号。
其次,采用三阶AR模型对手部震颤实时建模和预测。该方法适合在小型嵌入式系统中实时处理手部震颤,震颤信号建模与预测的实现是基于DSP数字处理器。震颤滤波的实现是通过过去时刻的震颤信号来预测当前时刻的震颤,并将得到的震颤信号取反与当前时刻实际手部输出信号相叠加,其输出信号即为当前时刻经滤波处理后的手部操作信号。采用AR模型描述震颤行为的优点为:便捷的模式识别性能;AR频谱有着更好的频率分辨率;便于实现(尤其对于存储空间有限、计算机复杂度不高的小型嵌入式系统)。但其不足之处在于将震颤信号简化为一种线性高斯随机过程,弱化了震颤信号的特征,无法表征微创外科手术中的真实颤抖。
当前所提出的震颤抑制方案多数是采用低通滤波或带通滤波的方式来滤除震颤信号。这种滤波方法操作简便易于实现,但也存在其固有的缺陷:a.对震
颤的滤波不精确。在滤波过程中会将部分有用的信号误认为震颤信号滤除,而将部分震颤信号误认为有用信号保留。b.实时性能不满足。低通滤波器本身具有的滞后性不可避免地会影响到信号的实时处理,尤其在高可靠性、高精度要求的微创手术中很难保证手术的质量。为此震颤滤波器的设计必须要能够根据震颤信号的频率变化自适应地改变滤波器的阀值,而基于权值的线性傅里叶均衡器(WFLC)很好地解决了这个问题。WFLC是从频率、幅值和相位这三个方面对震颤信号进行建模和滤波,该方法中的滤波阀值根据震颤信号的频率自适应地调整,从而更为精确地跟踪震颤信号,达到比较好的滤波效果。AR模型是针对一种能够适用于小型嵌入式系统中的震颤滤波,这种方法可以很好地对震颤信号进行建模和预测,简单且易于实现。但WFLC和AR模型这两种方法都未能对震颤信号在频域和时域同时进行分析,这对于更为精确地认识震颤信号至关重要。另外,手术操作者的手术经验对于手术的成败也是很重要,在当前所提出的方法中还未曾出现将手术操作者的手术经验融入进微创手术中,为此这也是很值得研究的一个方向。
参考文献
[1]Balllantyne G H,Jacques Premer of robotic and telerobotic surgery, 2004
[2]Paolo Dario,Eugenio Guglielmelli,Robotic for Medical Applications,IEEE Robotics and Automation Magazine,1996
[3]邓乐,赵丁选. 一种新的力觉临场感遥操作机器人系统的控制方法[J]. 机电工程,2005
[4]刘治,吴启航,章云.主从式微创手术机器人系统的自适应滤波装置.中国:2010
[5]Zhi Liu,Qihang Wu and Yun Zhang.“LS—SVM Based Self-learning Tremor Controller for Microsurgery”,International Workshop on Computer Science for Environmental Engineering and Ecolnformatic.2011,Harbin,China
[6] Matsuhir a N , Asakura M , Bamba H . Manoeuv rability of a
master- slave manipulator with different configurations and its evaluation tests [J] . Advanced Robotics,1994, 8(2) : 185-203.
机器人设计与制作课程设计报告(2011)-框架
“机器人设计与制作”课程设计报告 特种作业机器人 专业:楼宇自动化 班级: 08级2班 设计人及学号:张峰豪 66 指导教师:王国江 完成日期: 2011年11月
一、设计目的: 利用机器人平台进行具体的项目实施。在这次设计过程中主要是要求机器人在特殊情况下的运用,运用情况是在不知道着火地点的情况下进行探测,探测出火源所在地,并启动灭火程序和机械进行灭火。考虑到现有装备和条件,不要求在机器人实现的时候实现灭火,但要求机器人在寻找到火源的时候能够及时有效的报警,并提供火源位置。 二、设计任务: 首先对机器人进行选择根据实验室现有设备和实验的需要我们先选取了实验小车,小车经过行进假想是按照房屋建筑的内边缘也就是房屋的内壁进行行进,行进过程是挨个房屋一个接一个的搜索。如果查找到火源的所在则停下来并且报警。如果不停下来则继续行进。在行进过程中如果小车碰到了房屋的墙壁这自动矫正方向继续行进。 三、设计要求: 综合分析了小车的各项性能以及我们本次课程所需要达到的要求得出一下设计中必须注意的环节和要求。 1:小车的报警的处理,小车的目的是发现火源并报警灭火。因为实验设备限制以及自身学习的原因故不能实现灭火这项功能但是要实现报警。 2:小车行进的设计,在小车运动过程中肯定会碰到房屋墙角或者墙
壁,而小车碰撞之后的方向矫正以及行进速度等一系列问题必须考虑。 3:小车初始行进路线的考虑,因为没有无线遥控系统,则在给小车的初始设计时就要是小车能够按照预定的速度预定的方向进行行走。4:程序编写的代码和相关传感器的编好及选择,因为我们使用的小车有5个碰撞传感器和两个红外传感器。考虑到多个传感器的使用和配合以及红外传感器探测热源的使用。须详细谅解各个传感器所对应的编号以及对应的使用范围和方法,以便于编辑程序时把控好程序。5:小车的拐弯弧度,因为设计到小车有90度,270度以及360度的转弯情况,所以要根据车身大小和间出口宽度以及转角读书综合考虑设计出小车的转角弧度,亦随之设计出小车的左右轮转向的速度以此来达到控制小车转向弧度的目的。 四、系统设计: 1、介绍所使用的硬件情况及工作原理。 图一机器人小车全图
机器人控制技术基础实验报告
华北电力大学 实验报告 | | 实验名称:机器人控制技术基础 课程名称:机器人控制技术基础 实验人:张钰信安1601 201609040126 李童能化1601 201605040111 韩翔宇能化1601 201605040104 成绩: 指导教师:林永君、房静 实验日期: 2016年3月4日-3月26日 华北电力大学工程训练中心
第一部分:单片机开发板 实验一:流水灯实验 实验目的:通过此实验,初步掌握单片机的 IO 口的基本操作。 实验内容:控制接在 P0.0上的 8个LED L0—L8 依次点亮,如此循环。 硬件说明: 根据流水灯的硬件连接,我们发现只有单片机的IO口输出为低电平时LED灯才会被点亮,我们先给P0口设定好初值,只让其点亮一盏灯,然后用左右移函数即可依次点亮其他的灯。 源程序如下: #include
led_1=1; led_2=0; display_ms(10); led_2=1; led_3=0; display_ms(10); led_3=1; led_4=0; display_ms(10); led_4=1; led_5=0; display_ms(10); led_5=1; led_6=0; display_ms(10); led_6=1; led_7=0; display_ms(10); led_7=1; led_8=0; display_ms(10); led_8=1; } } 第二部分:机器人小车 内容简介:机器人小车完成如图规定的赛道,从规定的起点开始,记录完成赛道一圈的时间。必须在30秒之内完成,超时无效。其中当小车整体都在赛道外时停止比赛,视为犯规,小车不规定运动方向,顺时针和逆时针都可以采用,但都从规定的起点开始记录时间。 作品优点及应用前景: 单片机可靠性高,编程简单单片机执行一条指令的时间是μs级,执行一个扫描周期的时间为几ms乃至几十ms。相对于电器的动作时间而言,扫描周期是
机器人技术报告
《机器人技术》课程项目智能涂胶避障装配多功能机器人 姓名:尤振民、李明 胡强强、布贺宁 指导教师:姚建涛、李艳文、刘宝华 2014年10月
智能涂胶避障装配多功能机器人 摘要 机器人技术是一个集环境感知、轨迹规划、机械手应用等功能于一体的机电一体化系统。它是集中了计算机、机构学、传感技术、电子技术、人工智能及自动控制等多科而形成的高新技术。本次课程设计的装配机器人智能小车就是这种高新技术综合体的一种尝试。装配机器人智能小车主要由机械系统,环境识别系统,运动控制系统及机械臂控制系统组成。小车以单片机为核心,附以外围电路,采用光电检测器进行检测故障和循迹,并用软件控制小车及机械臂的运动,从而实现小车的自动行驶、转弯、寻迹检测、避障、停止及装配等功能的智能控制系统。 机器人技术基础系统地介绍了机器人的基础理论和关键技术。主要内容包括:机器人的机构、位姿描述和齐次变换、操作臂运动学、操作臂的雅可比、操作臂动力学、轨迹规划、操作臂的控制、机器人语言和离线编程等。本书反映了机器人在规划、控制和编程方面近期所取得的成果。此外,书中还附有习题和编程练习。 主要的项目分工情况如下:尤振民:机械手三维图形的制作及动画仿真 李明:资料收集,机械手臂编程及调试 胡强强:机械手臂的尺寸设计,轨迹规划 布贺宁:机械手臂方案论证,项目报告,PPT a)比赛场地
目录 1前言 ....................................... 2设计方案的确定.............................. 3参数确定 ................................... 3.1机械手臂的设计...................................................... 3.2 位移分析................................. 3.3 机械手爪设计......................................................... 4工作空间分析................................ 4.1 运动学正解............................................................. 4.2 运动学反解............................................................. 5速度分析 ................................... 6轨迹规划 ................................... 7项目总结 ................................... 8心得体会 ................................... 9参考文献 ...................................
机器人实验报告
智能机器人实验报告1 学院:化学与材料科学学院 学号: 2015100749 姓名:朱巧妤 评阅人:评阅时间:
实验1 电驱动与控制实验 (一)实验目的 熟悉和掌握机器人开发环境使用,超声传感器、碰撞传感器、温度传感器、颜色传感器等常见机器人传感器工作原理与使用方法,熟悉机器人平台使用与搭建;设计一个简单的机器人,并采用多种程序设计方法使它能动起来。 (二)仪器工具及材料 计算机、机器人实验系统、机器人软件开发平台、编程下载器等设备。 (三)内容及程序 实验内容: (1)碰撞传感器原理与应用; (2)颜色传感器原理与应用; (3)测距传感器原理与应用; (4)温度传感器原理与应用; (5)熟悉开发环境使用与操作;设计一个简单轮式移动机器人,并使用图形化编程方式实现对机器人的控制,通过该设计掌握机器人开发平台的结构设计、程序设计等基本方法。 实验步骤: 1)首先确定本次要做的机器人为货架物品颜色辨别的机器人。 2)根据模型将梁、轴、插销、螺丝等零件拼装成一个货架台 3)将货架台安装上可识别颜色的摄像头,并装在控制器上方,将两个摄像头的连接线分 别插入控制器的传感器接口,将显示器连接线插入传感器接口。 4)拼装完成后将控制器连接电脑,在电脑上运用Innobot软件对机器人进行颜色识别动 作的编程,拖动颜色传感器模块,对应选择数码管接口以及两个摄像头的接口,使机器人能将货架台上物品的颜色反应到数码管上。 5)将所编程序进行上传。测试看机器人是否能将颜色反映到显示器上完成所编动作。
(四)结果及分析 使用梁和轴以及螺钉拼装出货架台。 将拼装好的货架台装到传感器上。
人工智能课程设计报告-罗马尼亚度假问题
人工智能课程设计报告-罗马尼亚度假 问题 1
2
3 2020年5月29日 课 程 :人工智能课程设计报告 班 级: 姓 名: 学 号: 指导教师:赵曼 11月
人工智能课程设计报告 课程背景 人工智能(Artificial Intelligence),英文缩写为AI。它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等。人工智能从诞生以来,理论和技术日益成熟,应用领域也不断扩大,能够设想,未来人工智能带来的科技产品,将会是人类智慧的”容器”。 人工智能是对人的意识、思维的信息过程的模拟。人工智能不是人的智能,但能像人那样思考、也可能超过人的智能。 人工智能是一门极富挑战性的科学,从事这项工作的人必须懂得计算机知识,心理学和哲学。人工智能是包括十分广泛的科学,它由不同的领域组成,如机器学习,计算机视觉等等,总的说来,人工智能研究的一个主要目标是使机器能够胜任一些一般需要人类智能才能完成的复杂工作。但不同的时代、不同的人对这种”复杂工作”的理解是不同的。 人工智能是计算机学科的一个分支,二十世纪七十年代以来被称为世界三大尖端技术之一(空间技术、能源技术、人工智能)。也被认为是二十一世纪三大尖端技术(基因工程、纳米科学、人工智能)之一。这是因为近三十年来它获得了迅 速的发展,在很多学科领域都获得了广泛应用,并取得了丰硕的成果,人工智能已逐 - 1 - 2020年5月29日
机器人设计论文
绿化植树机器人设计 摘要: 这个机器人是针对大量绿色植树而设计的,利用机械四足作为其活动方式,机器人通过视频识别系统在有限范围内对地形与植被作出判断,然后通过自动行走系统移动到目标地点前面,再通过机械手取出携带的植物幼苗,通过这个可以360度旋转的机械臂进行种植工作,机械臂可以进行种植、培土、等工作。种植完成后还将用一层可分解的塑料薄膜覆盖植物幼苗,保证其在能够自行成长前的安全。 关键词: 绿化植树、四足行走、山坡作业、视频识别、机械臂操作 设计背景: 地球现在正面临着绿色植被在不断减少的危机,而人类也因为这样要面对日益严峻的环境问题。大量植树还原绿色植被是一个相当重要的手段来解决这个难题,但是依靠人力去做的话,效率始终不够高。所以在这里我想设计一个专门用于大作业量的绿化植树机器人。 设计思路: 这个机器人,是需要面对山坡这样的陡峭地形的,由于特殊的使用环境,机器人的活动方式要求能够灵活的应对颠簸不平的土地,机械四足需要能够根据不同的地势调整四足的高度,确保平稳的行走,这种活动方式才能使机器人轻松到达山崖大部分位置。移动起来必须十分的轻巧,以避免对其他植物的伤害。由于这个机器人对视频识别有着较高的要求,所以必须在这方面有所突破,同时当发现有杂草或者有害植物的时候,还可以通过高温蒸汽将其杀死,来保证种植的植物幼苗的生长。360度旋转的机械臂可以保证种植过程的顺利进行。 详细具体设计方案: 一.整体结构: 1.整个机器人分成上下两大部分,上部分是机械手臂,主要实现机器人的整个种植 操作,下部是机器人的机身和四足,包括:植物幼苗存放仓、红外线距离测量 仪、摄像头、电脑处理系统。 2.机器人是通过电力驱动的,所以必须携带储电池,也是安装在机身。 二.中央处理系统: 机器人的机身将安装一个中央处理系统,作为机器人的大脑,它主要调节机器人三 大系统:机械四足行走系统、机器人视觉系统、机械臂控制系统。中央处理系统要 接收和分析红外线距离测量仪、摄像头、机械臂传感器等反馈信息,以及控制四足 的行进系统、机械臂操作等。 三.机械四足行走系统: 1.机械四足的形状: 一开始的时候,我曾经很困惑于如何把握行走稳定与行走速度之间的平衡,后来设 想出仿人类四肢的关节加上圆形的脚盘这个方案,总体感觉可以满足行走的需要。 2.如何实现行进: 参考了机械小狗的设计,将机械四足连接在机器人的中央处理系统而成为一个整 体,接受中央处理系统的控制。每次改变一个机械足的位置,实现整个机器人的行
机器人课程设计报告范例
机器人课程设计报告范例
**学校 机器人课程设计名称 院系电子信息工程系 班级10电气3 姓名谢士强 学号107301336 指导教师宋佳
目录 第一章绪论 (2) 1.1课程设计任务背景 (2) 1.2课程设计的要求 (2) 第二章硬件设计 (3) 2.1 结构设计 (3) 2.2电机驱动 (4) 2.3 传感器 (5) 2.3.1光强传感器 (5) 2.3.2光强传感器原理 (6) 2.4硬件搭建 (7) 第三章软件设计 (8) 3.1 步态设计 (8) 3.1.1步态分析: (8) 3.1.2程序逻辑图: (9) 3.2 用NorthStar设计的程序 (10) 第四章总结 (12) 第五章参考文献 (13)
第一章绪论 1.1课程设计任务背景 机器人由机械部分、传感部分、控制部分三大部分组成.这三大部分可分成驱动系统、机械结构系统、感受系统、机器人一环境交互系统、人机交互系统、控制系统六个子系统现在机器人普遍用于工业自动化领域,如汽车制造,医疗领域,如远程协助机器人,微纳米机器人,军事领域,如单兵机器人,拆弹机器人,小型侦查机器人(也属于无人机吧),美国大狗这样的多用途负重机器人,科研勘探领域,如水下勘探机器人,地震废墟等的用于搜查的机器人,煤矿利用的机器人。如今机器人发展的特点可概括为:横向上,应用面越来越宽。由95%的工业应用扩展到更多领域的非工业应用。像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷,还有空间机器人、潜海机器人。机器人应用无限制,只要能想到的,就可以去创造实现;纵向上,机器人的种类会越来越多,像进入人体的微型机器人,已成为一个新方向,可以小到像一个米粒般大小;机器人智能化得到加强,机器人会更加聪明 1.2课程设计的要求 设计一个机器人系统,该机器人可以是轮式、足式、车型、人型,也可 以是仿其他生物的,但该机器人应具备的基本功能为:能够灵活行进,能感知光源、转向光源并跟踪光源;另外还应具备一项其他功能,该功能可自选(如亮灯、按钮启动、红外接近停止等)。 具体要求如下: 1、根据功能要求进行机械构型设计,并用实训套件搭建实物。 2、基于实训套件选定满足功能要求的传感器; 3、设计追光策略及运动步态; 4、用NorthStar设计完整的机器人追光程序;
机器人实训报告
一、机器人擂台赛 1、实训目的 机器人擂台赛的目的在于促进智能机器人技术(尤其是自主识别、自主决策技术)的普及。参赛队需要在规则范围内以各自组装或者自制的自主机器人互相搏击,并争取在比赛中获胜,以对抗性竞技的形式来推动相关机器人技术在大学生、青少年中的普及与发展。可以用自己设计的机器人来参加擂台赛,同时掌握这个环节所展现出来的机器人技术。 机器人擂台赛未来的发展目标是:比赛中,两个使用双腿自主行走的仿人形机器人互相搏击并将对方打倒或者打下擂台。? 2、实训要求 在指定的大小擂台上有双方机器人。?双方机器人模拟中国古代擂台搏击的规则,互相击打或者推挤。如果一方机器人整体离开擂台区域或者不能再继续行动,则另一方获胜。机器人大小要求长、宽、高分别不能超过30cm、30cm、40cm 。 比赛场地大小为长、宽分别为是 2400?mm的台,台上表面即为擂台场地。有黑色的胶布围成。?比赛开始后,?围栏内区域不得有任何障碍物或人。? 3、比赛规则分析? 我们需要吃透比赛规则,然后才能在比赛规则允许的范围内,尽量让我们的机器人具有 别人不具有的优势。对上述的比赛规则分析得到以下几个重点:? 3、1需要确保自己不掉下擂台
需要有传感器进行擂台边沿的检测,当发现机器人已经靠近边沿立刻转弯或者掉头。擂 台和地面存在比较大的高度差,我们通过测距传感器很容易发现这个高度落差,从而判断出 擂台的边沿。如图所示,在机器人上安装一个测距传感器,斜向下测量地面和机器人的 距离,机器人到达擂台边沿时,传感器的测量值会突然间变得很大。由于红外测距传感器使 用方便,并且“创意之星”控制器可以接入最多 8 个红外测距传感器,我们可以将它作为首选方案。? 擂台地面时有灰度变化的,我们可以在机器人腹部安装一些灰度传感器,来判读机器人 覆盖区域的灰度变化,从而判读机器人相对场地的方向。可以通过整体灰度值来判读机器人 的位置是不是靠近边沿,如果机器人靠近边沿就转弯后者后退。? 3、2需要及时的发现敌方 这里我们使用红外接近开关作为寻找敌方的方案并不算优秀,红外接近开关的有效测量范围是 20cm,20cm 之外的物体是察觉不到的。我们可以改成红外测距传感器,它的有效测量范围是 10‐80cm,比较适合我们当前的使用场合。? 3、3需要迅速的推动敌方,将敌方退下擂台 我们可以想象,两只斗牛相互推挤,赢的一定是力气比较大的一方。?
智能机器人设计报告
智能机器人设计报告 参赛者:庆东肖荣于腾飞 班级:级应用电子技术 指导老师:远明 日期:年月日 一、元器件清单: ,,,,,,,蜂鸣器,光敏电阻,光敏三极管,电阻、电容若干,超亮及普通发光管。二、主要功能: 本设计按要求制作了一个简易智能电动车,它能实现的功能是:从起跑线出发,沿引导线到达点。在此期间检测到铺设在白纸下的薄铁片,并实时存储、显示在“直道区”检测到的薄铁片数目。电动车到达点以后进入“弯道区”,沿圆弧引导线到达点继续行驶,在光源的引导下,利用轻触开关传来的电信号通过障碍区进入停车区并到达车库,完成上述任务后能够立即停车,全程行驶时间越少越好。 本寻迹小车是以有机玻璃为车架,单片机为控制核心,加以减速电机、光电传感器、光敏三极管、轻触开关和电源电路以及其他电路构成。系统由通过口控制小车的前进后退以及转向。寻迹由超亮发光二极管及光敏电阻完成,避障由轻触开关完成,寻光由光敏三极管完成。 并附加其他功能: .声控启动 .数码显示 .声光报警 三、主体设计 车体设计 左右两轮分别驱动,后万向轮转向的方案。为了防止小车重心的偏移,后万向轮起支撑作用。对于车架材料的选择,我们经过比较选择了有机玻璃。用有机玻璃做的车架比塑料车架更加牢固,比铁制小车更轻便,美观。而且裁减比较方便! 电机的固定采用的是铝薄片加螺丝固定,非常牢固,且比较美观。 轮子方案 在选定电机后,我们做了一个万向轮,万向轮的高度减去电机的半径就是驱动轮的半径。轮子用有机玻璃裁出来打磨光华的,上面在套上自行车里胎,以防止打滑。 万向轮 当小车前进时,左右两驱动轮与后万向轮形成了三点结构,这种结构使得小车在前进时比较平稳。
机器人实验报告
一、机器人的定义 美国机器人协会(RIA)的定义: 机器人是一种用于移动各种材料、零件、工具或专用的装置,通过可编程序动作来执行种种任务的、并具有编程能力的多功能机械手。 日本工业机器人协会(JIRA—Japanese Industrial Robot Association):一种带有存储器件和末端执行器的通用机械,它能够通过自动化的动作替代人类劳动。(An all—purpose machine equipped with a memory device and an end—effector,and capable of rotation and of replacing human labor by automatic performance of movements.) 世界标准化组织(ISO):机器人是一种能够通过编程和自动控制来执行诸如作业或移动等任务的机器。(A robot is a machine which can be programmed to perform some tasks which involve manipulative or locomotive actions under automatic control.) 中国(原机械工业部):工业机器人是一种能自动定位控制、可重复编程、多功能多自由度的操作机,它能搬运材料、零件或夹持工具,用以完成各种作业。 二、机器人定义的本质: 首先,机器人是机器而不是人,它是人类制造的替代人类从事某种作业的工具,它能是人的某些功能的延伸。在某些方面,机器人可具有超越人类的能力,但从本质上说机器人永远不可能全面超越人类。
机器人课程设计报告
机器人课程设计报 告
智能机器人课程设计 总结报告 姓名: 组员: 指导老师: 时间:
一、课程设计设计目的 了解机器人技术的基本知识以及有关电工电子学、单片机、机械设计、传感器等相关技术。初步掌握机器人的运动学原理、基于智能机器人的控制理论,并应用于实践。经过学习,具体掌握智能机器人的控制技术,并使机器人能独立执行一定的任务。 基本要求:要求设计一个能走迷宫(迷宫为立体迷宫)的机器人。要求设计机器人的行走机构,控制系统、传感器类型的选择及排列布局。要有走迷宫的策略(软件流程图)。对于走迷宫小车控制系统设计主要有几个方面:控制电路设计,传感器选择以及安放位置设计,程序设计 二、总体方案 2.1 机器人的寻路算法选择 将迷宫看成一个m*n的网络,机器人经过传感器反馈的信息感知迷宫的形状,并将各个节点的与周围节点的联通性信息存储于存储器中,再根据已经构建好的地图搜索离开迷宫的路径。这里可选择回溯算法。对每个网格从左到右,每个网格具有4个方向,分别定义。并规定机器人行进过程中不停探测前方是否有障碍物,同时探测时按左侧规则,进入新网格后优先探测当前方向的左侧方向。探测过程中记录每个网格的四个方向上的状态:通路、不通或未知,探测得到不同状态后记记录,同时记录当前网
格的四个方向是否已被探测过。若某网格四个方向全部探测过则利用标志位表示该网格已访问。为了寻找到从起点到终点的最佳路径,记录当前网格在四个方向上的邻接网格序号,由此最后可在机器人已探测过的网格中利用Dijkstra算法找到最佳路径。并为计算方便,记录网格所在迷宫中行号、列号。并机器人探索过程中设置一个回溯网格栈记录机器人经过的迷宫网格序号及方向,此方向是从一个迷宫网格到下一个迷宫网格经过的方向。设置一个方向队列记录机器人在某网格内探测方向的顺序。设置一个回溯路径数组记录需要回溯时从回溯起点到回溯终点的迷宫网格序号及方向。 考虑到迷宫比较简单,且主要为纵横方向的直线,可采用让小车在路口始终左转或者始终右转的方法走迷宫,也就是让小车沿迷宫的边沿走。这样最终也能走出迷宫。本次课程设计采用此方法。即控制策略为机器人左侧有缺口时,向左进入缺口,当机器人前方有障碍是,向右旋转180°,其余情况保持前进。 2.2 传感器的选择 由于需要检测机器人左侧和前方是否有通路,采用红外传感器对机器人行进方向和左侧进行感知。红外避障传感器是依据红外线的反射来工作的。当遇到障碍物时,发出的红外线被反射面反射回来,被传感器接收到,信号输出引脚就会给出低电平提示信号。本机器人系统的红外避障信号采用直接检测的方式进行,直接读取引脚电平。传感器感应障碍物的距离阈值能够经过调节
排爆机器人设计
传感器排爆机器人设计 摘要: 通过各类传感器控制设计了排爆机器人机械臂精确定位并完成排爆任务。对角度传感器,压敏传感器,红外测距传感器等多种传感器进行了设计分析。 关键词: 排爆机器人; 机械臂; 传感器信息融合 本次设计提出如下机械臂设计任务:可以用轮子在平整的道路上以较高的速度行驶,其可伸缩手臂的活动半径为 4m ,最大仰角 87 °,肘能弯曲 90 °,腕部活动范围 160 °,手爪可旋转 360 °,手爪抓握力可达 54kg ;另外,手臂上装有一支半自动猎枪,可与激光指示器配合使用,能在 45m 远处发射,使弹丸命中直径为 2.5cm 的目标。 1 排爆机器人机械臂控制系统设计图 本次设计的机械臂是一个相对独立的机构,它由肩关节、大臂关节、肘关节、腕关节、爪关节等组成,排爆机器人机械臂装配图如图1 所示。 图1 排爆机器人机械臂装配图 2 排爆机器人机械臂所使用到的传感器 对排爆机器人而言,机械臂的手爪坐标中心能与爆炸物坐标中心对齐才是设计的主要目标。如图1 所示,机器人的臂、肘、腕及手爪的角度均由角度传感器测量得出。手爪上安装了测量抓举力的压敏传感器、测量手爪张开距离的红外测距传感器、测量手爪坐标中心与目标物体前
后距离的激光测距传感器以及安装在手爪上下的2 个摄像头。当这些传感器信息经过协处理器融合到视频图像中,系统依照图像上的坐标值就能正确定位当前手爪坐标中心与目标物中心坐标位置,操控手爪使其正确定位。 在图1的手爪上的传感器安装可以看出,手爪上装有摄像头,激光测距传感器,力敏传感器,红外测距传感器。排爆时,需要有良好的工作视野,应对突发武装威胁的能力,对排爆物的精准定位以及控制好排爆机器人的抓举力度。摄像头保证了排爆机器人在工作时能为工作人员提供周围环境的视野。半自动猎枪则可以应对突发的武装威胁。激光测距传感器有助于定位物体的距离与位置。力敏传感器,则保证了排爆机器人在排爆时能把握好力度顺利完成排爆工作。 排爆机器人装有半自动猎枪,装配的激光指示器起到了精准打击目标的作用。 激光目标指示器工作原理 激光发射装置、激光接收装置和光学观瞄装置的光轴是平行的,以保证所观察目标就是激光照射目标。光学观瞄装置是用于初始捕获目标的,当观察员从光学观瞄装置中发现目标并将目标锁定到视场中心时,由于观瞄装置的光轴与激光发射光轴和激光接收光轴是平行的,或者说光轴的偏差量非常小,为零点几毫狐度,因此由激光发射装置发射的激光将照射到观瞄装置中心所对应的位置。为了保证制导炮弹能够探测到目标反射的激光信号,激光目标指示器的工作距离约7、8km。 激光束以一定的频率照射目标,为了避免敌方的干扰,要对激光脉冲进行编码,常用的编码方式有脉冲调制码,变间隔码和精确频率码。脉冲调制码是对一定重复频率的脉冲激光信号进行调制的编码,调制的目的是让某个应该产生激光的脉冲不发射激光。变间隔码的激光脉冲间隔是按规律周期变化的。 结语 通过这次传感器排爆机器人设计,我了解到了人工排爆工作的艰难与危险,因此,传感器技术在排爆机器人上的应用有着非常重要的意义及价值。
机器人实验与技术实验报告
机器人技术课程实验报告 题目:机器人灭火 专业:自动化 班级: 101 姓名及学号: 2013年10 月 成都信息工程学院控制工程学院 一、设计目的: 1、通过本课程的学习和训练,了解有关机器人技术方面的基本知识,掌握机器人学所涉及的技术的基本原理和方法,得到机器人技术开发的实践技能训练。
2、巩固相关理论知识,了解机器人技术的基本概念以及有关电工电子学、单片机、传感器等技术。 3、通过使用机器人模型,编程处理机器人运动过程,分析机器人的控制原理,通过对其具体结构的了解。 4、培养自学能力和独立解决问题的能力,熟悉MT-UROBOT图形界面的编程与调试方法,熟练掌握平台的输入输出口进行控制。 二、设计任务: 使机器人能在迷宫内自主行走,能自己编写程序,让机器人完成相应的任务。 三、设计要求: 1、认真阅读教材中第1章和第2章的内容,学会工程项目的建立,应用程序的仿真与调试。 2、利用I/O口和传感器对机器人进行控制。(实验步骤和参考程序可参照使用说明中的第3章及第四章4.3节) 四、系统设计: 1、介绍所使用的硬件情况及工作原理: MT-UROBOT是一种供教学和研究的新型移动智能机器人。开关按钮控制MT-URO MT-UROBOT结构(如下:) OT 电源开关的按钮,按此按钮可以打开或关闭机器人电源。“电源”指示灯按下 MT-UROBOT 的开关后,这个灯会发绿光,这时可以与机器人进行交流了!“充电”指示灯当你给机器人充电时,“充电”指示灯发红光。“充电口”将充电器的相应端插入此口,再将另一端插到电源上即可对机器人充电。“下载口”“充电口”旁边的“下载口”用于下载程序到机器人主板上,使用时只需将串口连接线的相应端插入下载口,另一端与计算机连接好,这样机器人与计算机就连接起来了。“复位/MTOS”按钮这是个复合按钮,用于下载操作系统和复位。当串口通信线接插在下载口上时,按击此按钮,机器人系统默认为此操作为下载操作系统;如果你想使用其复位功能则需要将通信线拔下,按击此按钮,机器人系统认为此操作为系统复位。“RUN”键打开电源后,按击“RUN”键,机器人就可以运行内部已存储的程序,按照你的“指令”行动。“通信”指示灯“通信”指示灯位于机器人主板的前方,在给 MT-UROBOT 下载程序时,这个黄灯会闪烁,
智能化机器人设计报告
上海应用技术学院Shanghai Institute of Technology 组长:王文博 组员:严格,熊祚强 指导教师:周文 项目工期:2014年6月10日——2015年6月15日
摘要:本项目研发智能家庭监督机器人是基于智能手机平台之下所应用的, 在借助于ug三维建模设计,机械设计以传动设计,及嵌入式硬件的插入,成功地实现了人远距离分身控制并监督家庭情况,能够随时随地掌握家庭环境的变化,为家庭安全的保障提供了基础,并且解决了目前市场家政机器人价格昂贵的现象。 前言: 随着物联网,智能家居以及智能手机的兴起,针对国内的市场环境, 本项目研发出的一系列四款智能家庭服务机器人,本项目研发的机器人管家是一种远程交互型机器人家政机器人采用低功耗WIFI技术连接互联网及手机终端通过强大智能手机及网络云服务器的数据计算处理能力对机器人进行智能化控制,从而降低了机器人的所需硬件成本,使得家政机器人能被国内消费者所接受。此机器人装配了红外,433射频的家电控制系统,实现了远程家电控制功能,并解决了目前智能家居家电设备接口协议不统一,传统家电难以兼容的问题。此外,机器人本身留有各种传感器接口,通过采用本项目研发的红外热式,温湿度,甲醛以及PM2.5传感器机器人能够实现远程家庭环境监控,家居安防的功能。能够解决目前家庭服务类机器人依赖进口,售价高昂的市场现状。 正文:(建模方面)
如上图所示,主观三视图,以及大致轮廓视图,外观视图上采取了全新的外观设计,底部以正六棱柱作为底座,并且采用抽壳技术,扩大内部空间,方便内部嵌入传动系统,机械设计等等,并且为以后的硬件电子设施提供了空间基础,上部采用圆弧拉伸,同样扩大内部空间,便于齿轮,马达等传动设施插入,放手机的补位,采用加盖模式,内部设有弹簧等设施,加紧设备。具体如下: 一:底轮 底轮采用一般的轮胎设计,圆弧效果便于运动,轮胎表面加拉伸效果,增加抓地,增大摩擦,内部增加五角星设计,省材料, 增加美观 二:转向轮: 由于底面为正六棱柱,两个轮子不能稳定行走,并且转向不方便,故在底面加上两个可以自由旋转的转向轮,转向轮 采用平常滑板上的轮子,这样的轮,自由性比较大,可以随 意转向,而传统的车轮,自由性较低,两者互相结合,既可 以自由转向,又可以稳抓底面。建模设计上主要采用了草图 拉伸方式。 三:滚轴:
工业机器人编程技术实训课程标准
工业机器人编程技术课程标准 一、课程基本信息 先修课程:电工技术基础、电气控制与PLC、电子技术基础 后续课程:工业机器人安装与调试实训 课程类型:专业必修 二、课程性质 “工业机器人编程技术”是机电专业的一门专业核心课,是在相关专业学习课程学完后的一门综合性课程。机器人技术是一门跨多个学科的综合性技术,涉及自动控制、计算机、传感器、人工智能、电子技术和机械工程等多种学科的内容。本课程的先导课程为:“电工电子技术”、“电气控制与PLC”、“机电设备故障诊断与维修”“工业机器人安装与调试”,经过这四门课程的学习,学生已具备机械部件故障诊断与维修方法、机电设备电器控制、电子产品焊装调试、软件编程和机械图和电器原理图的识读能力。已基本具备学习本课程的知识、技能基础。《工业机器人编程技术》后续课程为《自动化工业生产的安装与调试实训》,进一步学习生产自动化的能力与技能。本课程在专业教学与实践工作之间起了承前启后的桥梁作用,是工业机器人技术专业人才培养过程重要的环节。 三、课程的基本理念 以学生为主体,以工学结合为宗旨,以岗位职业能力的培养为重点,目的是强化学生的工程实践能力与创新能力。“工业机器人编程技术”课程在设计教学思路和理念时,采用基于项目教学的课程教学模式。根据专业人才培养目标及岗位群对学生岗位能力提
出的要求,明确课程目标,分析岗位工作过程,确定岗位典型工作任务,并根据典型工作任务整合教学内容,设计相应的实训项目,注重培养学生的专业能力、方法能力、创新能力和社会能力。 四、课程设计 该该课程是依据“机电一体化专业工作任务与职业能力分析表”中的职业岗位工作项目设置的。其总体设计思路是为以工作任务为中心组织课程内容,让学生在完成具体项目的过程中构建相关理论知识,发展职业能力。课程内容突出对学生职业能力的训练,并融合了相关职业资格证书对知识、技能和态度的要求。 通过对课程内容高度归纳,概括了工业机器人系统构成、机器手动操作、机器人编程控制、机器人参数设定及程序管理等,容的组织是由易到难,由浅入深,由基本理论知识到提高知识与技能训练。学生通过学习,基本掌握本课程的核心知识与技能,初步具备工业机器人现场编程能力以及有关的创新创业技能。 五、课程的目标 (一)总目标 本课程以面向就业岗位为导向,结合工业机器人技术能力目标,对本课程进行了知识体系重构。整个学习过程突出了职业性、实践性和实用性的特点。教学知识点由工业机器人的开关机操作到认识示教器,再到手动操作方法、自动运行方法,学习内容逐渐深化。通过本门学习领域课程工作任务的完成,使学生达到理论联系实际、活学活用的基本目标,提高其实际应用技能,并使学生养成善于观察、独立思考的习惯,同时通过教学过程中的案例分析强化学生的职业道德意识和职业素质养成意识以及创新思维的能力。 (二)具体目标: 1、知识:
机器人设计与制作报告
中国矿业大学徐海学院 双足竞步机器人设计与制作技术报告 队名:班级: 成员: 题目:双足竞步机器人的设计与制作(交叉足) 任课教师: 2015 年1月
双足竞步机器人设计与制作任务书班级学号学生姓名任务下达日期:2014年11 月24 日 设计日期:2014年11月24日至2015年1 月8 日设计题目:双足竞步机器人设计与制作(交叉足) 设计主要内容和完成功能: 1、双足竞步机器人机械图设计; 2、双足竞步机器人结构件加工; 3、双足竞步机器人组装; 4、双足竞步机器人电气图设计; 5、双足竞步机器人控制板安装; 6、整机调试 7、完成6米的马拉松比赛。 教师签字:
摘要 文章介绍了一个六个自由度的小型双足机器人的设计加工、调试与最后实现。设计过程包括机械结构设计、电路设计与制作,机器人步态规划算法研究,利用Atmega8芯片实现了对六个舵机的分时控制,编写VC上位机软件,通过串口通信对双足竞步机器人进行调试,通过人体仿生学调试出机器人的步态规划。实现了双足竞步机器人稳定向前行走、立正、向前翻跟头、向后翻跟头。 关键词:机器人,串口通信,步态规划,舵机
目录 一、系统概述 (5) 1.1 机器人的简述 (5) 1.2 机器人的组成 (5) 1.2.1执行机构 (5) 1.2.2驱动装置 (5) 1.2.3检测装置 (5) 1.2.4控制系统 (5) 二、硬件设计 (6) 2.1硬件设计的整体分析 (6) 2.2舵机的介绍 (6) 三、软件设计 (7) 四、系统调试 (8) 4.1步态的规划 (8) 4.2软件调试 (8) 五、结束语 (8) 六、参考文献 (8) 七、附录 (9) 程序代码 (9)
排爆机器人控制与无线通讯系统
排爆机器人控制与无线通讯系统 引言 排爆机器人属于搬运机器人的一种类型,很多搬运机器人是模仿人类的动作,用来帮助或部分代替人来进行繁重、危险、重复等工作。排爆机器人模仿人类的行走、抓取物体的动作,可以被用来排除现场的爆炸物。排爆机器人机械部分包含行走小车和机械手臂。 1 排爆机器人控制系统结构 排爆机器人控制系统不再采用原来机器人所采用的PLC控制方式,而是基于嵌入式工控机的基础上,采用基于Linux平台的开放式构件库,运算速度极快,可以达到微秒级。排爆机器人控制系统由三部分组成,即传感器部分、机器人本体、操作控制台组成。传感器部分包含宽接入、多信息融合器。宽接入、多信息融合基于ARM9系统,由12位精度以上A /D、32路I/O、RS232通讯接口组成,能融合多种传感器信号;机器人本体包含嵌入式控制计算机和各关节伺服电机,能驱动各轴(带补偿),分配各轴运动,处理和控制各种状态量;操作控制台部分包含主控PC机、指令解码器、图像解码器、无线接收发射器等。CCD摄像机和超声波传感器所获得的图像信息、障碍物信息,经无线传输至主控PC机。主控PC 机使用图像识别和分析技术获得对象物体的形状和位置信息,同时将目标物、障碍物等三维图像信息显示在计算机屏幕上。在人工指明目标物后,主控PC机经人工智能(模式识别、路径规划、轨迹避碰等)计算;将控制指令通过无线传输给机器人本体嵌入式控制计算机,自动控制机器人运动。基本结构如图1所示:
2 小车的行走控制 人工通过控制杆(或按钮),在小车引导图像(可视信号)的指示下,完成前进、后退、左转、右转和原地旋转的功能直至达到机械手的手爪能抓取可疑爆炸物的位置为止。机器人的平衡是利用整机的动力学算法求得,将求得多种数据去控制机器人手臂的空间姿态从而达到整机平衡而不至于倒覆。例如当小车在斜坡作上升运动时,机器人手臂往前靠以保持整机的平衡。小车在运动过程中需要避开可能遇到的障碍物。通过环境传感器如CCD摄像、超声波传感器等取得障碍物大小及环境信息,实现小车避障,即所谓的路径规划(如图2所示) 图2 排爆机器人路径规划示意图 3 机械手的运动控制
机器人创新实验报告
实验报告 (理工类) 课程名称: 机器人创新实验 课程代码: 6003199 学院(直属系): 机械工程与自动化学院 年级/专业/班:10级机械设计及其自动化6班学生姓名: 程俊杰伍星丁念波郭真亮实验总成绩: 任课教师: 李炜 开课学院: 机械工程与自动化学院 实验中心名称: 机械工程基础实验中心
一、设计题目:巡线小车 以Arduino控制板为核心的巡线小车。 二、成员分工: 姓名学号班级任务分配 郭真亮 312010********* 模具设计1班借用往届小车和查阅资料 程俊杰 312010********* 制造工程3班接线,编程、小车调试 丁念波 312010********* 模具设计1班接线,编程、小车调试 伍星 312010********* 产品设计2班现场拍照,整理实验报告 三、Arduino 简述 1. Arduino简介 Arduino是一块简单、方便使用的通用GPIO接口板,并可以通过USB接口和电脑通信。作为一块通用IO接口板,Arduino提供丰富的资源,包括: 13个数字IO口(DIO数字输入输出口); 6个PWM输出(AOUT可做模拟输出口使用); 5个模拟输入口(AIN模拟输入)。 Arduino开发使用java开发的编程环境,使用类c语言编程,并提供丰富的库函数。Arduino 可以和下列软件结合创作丰富多彩的互动作品:Flash,Processing,ax/MSP,VVVV…等。Arduino 也可以用独立的方式运作,开发电子互动作品,例如:开关控制Switch、传感器sensors输入、LED等显示器件、各种马达或其它输出装置。 2.Arduino规格 微型控制器 ATmega168 工作电压 5V 输入电压(建议) 7-12V 输入电压(极限) 6-20V 数字输入/输出端 14 (3, 5, 6, 9, 10, 11提供输出的PWM) 模拟输入端 6
机器人课程设计报告材料
智能机器人课程设计 总结报告 姓名: 组员: 指导老师: 时间:
一、课程设计设计目的 了解机器人技术的基本知识以及有关电工电子学、单片机、机械设计、传感器等相关技术。初步掌握机器人的运动学原理、基于智能机器人的控制理论,并应用于实践。通过学习,具体掌握智能机器人的控制技术,并使机器人能独立执行一定的任务。 基本要求:要求设计一个能走迷宫(迷宫为立体迷宫)的机器人。要求设计机器人的行走机构,控制系统、传感器类型的选择及排列布局。要有走迷宫的策略(软件流程图)。对于走迷宫小车控制系统设计主要有几个方面:控制电路设计,传感器选择以及安放位置设计,程序设计 二、总体方案 2.1 机器人的寻路算法选择 将迷宫看成一个m*n的网络,机器人通过传感器反馈的信息感知迷宫的形状,并将各个节点的与周围节点的联通性信息存储于存储器中,再根据已经构建好的地图搜索离开迷宫的路径。这里可选择回溯算法。对每个网格从左到右,每个网格具有4个方向,分别定义。并规定机器人行进过程中不停探测前方是否有障碍物,同时探测时按左侧规则,进入新网格后优先探测当前方向的左侧方向。探测过程中记录每个网格的四个方向上的状态:通路、不通或未知,探测得到不同状态后记记录,同时记录当前网格的四个方向是否已被探测过。若某网格四个方向全部探测过则利用标志位表示该网格已访问。为了寻找到从起点到终点的最佳路径,记录当前网格在四个方向上的邻接网格序号,由此最后可在机器人已探测过的网格中利用Dijkstra算法找到最佳路径。并为计算方便,记录网格所在迷宫中行号、列号。并机器人探索过程中设置一个回溯网格栈记录机器人经过的迷宫网格序号及方向,此方向是从一个迷宫网格到下一个迷宫网格经过的方向。设置一个方向队列记录机器人在某网格内探测方向的顺序。设置一个回溯路径数组记录需要回溯时从回溯起点到回溯终点的迷宫网格序号及方向。 考虑到迷宫比较简单,且主要为纵横方向的直线,可采用让小车在路口始终左转或者始终右转的方法走迷宫,也就是让小车沿迷宫的边沿走。这样最终也能走出迷宫。本次课程设计采用此方法。即控制策略为机器人左侧有缺口时,向左进入缺口,当机器人前方有障碍是,向右旋转180°,其余情况保持前进。 2.2 传感器的选择