sobel算子

Sobel算子改进算法
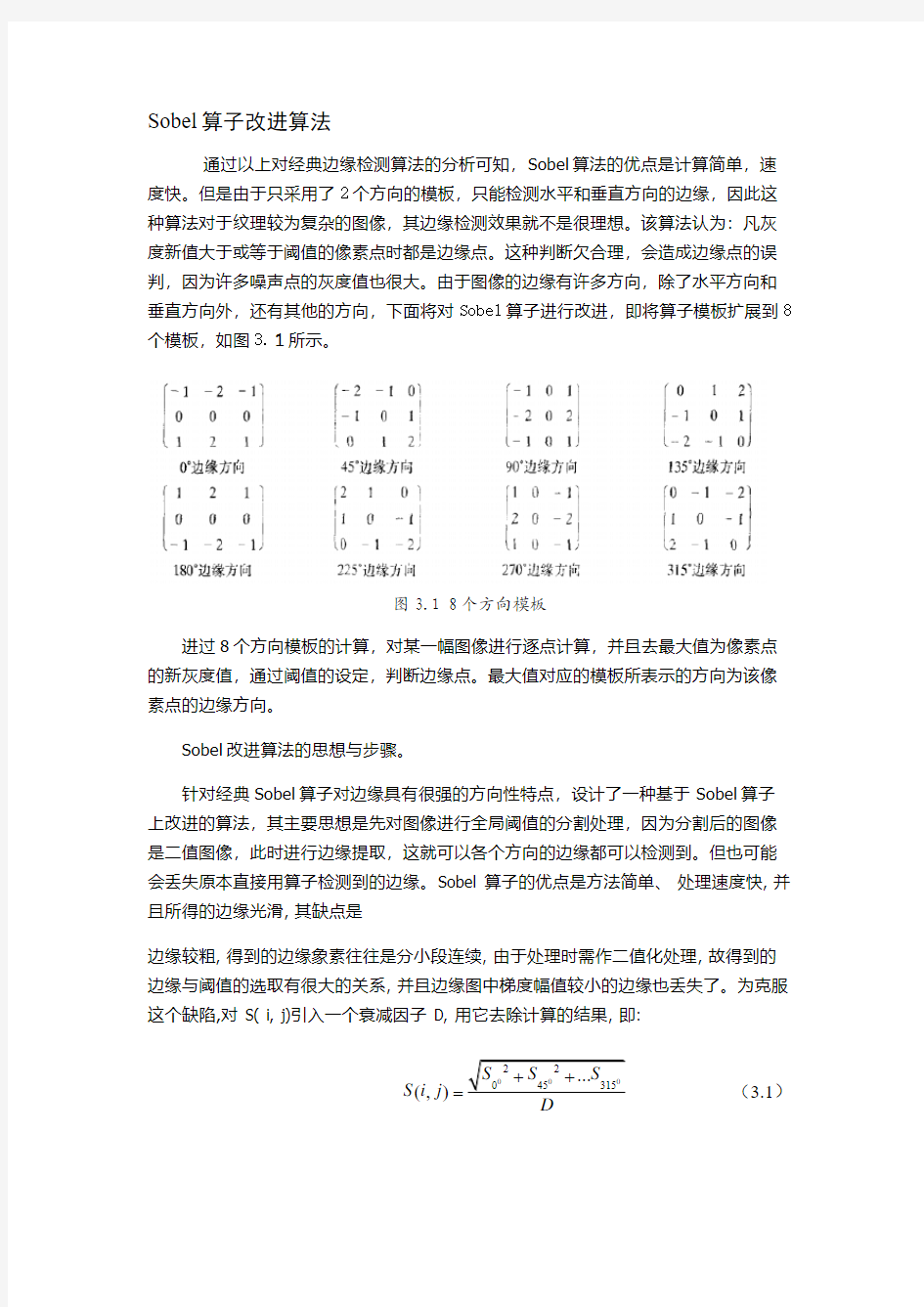
通过以上对经典边缘检测算法的分析可知,Sobel算法的优点是计算简单,速度快。但是由于只采用了2个方向的模板,只能检测水平和垂直方向的边缘,因此这种算法对于纹理较为复杂的图像,其边缘检测效果就不是很理想。该算法认为:凡灰度新值大于或等于阈值的像素点时都是边缘点。这种判断欠合理,会造成边缘点的误判,因为许多噪声点的灰度值也很大。由于图像的边缘有许多方向,除了水平方向和垂直方向外,还有其他的方向,下面将对Sobel算子进行改进,即将算子模板扩展到8个模板,如图3.1所示。
图3.1 8个方向模板
进过8个方向模板的计算,对某一幅图像进行逐点计算,并且去最大值为像素点的新灰度值,通过阈值的设定,判断边缘点。最大值对应的模板所表示的方向为该像素点的边缘方向。
Sobel改进算法的思想与步骤。
针对经典Sobel算子对边缘具有很强的方向性特点,设计了一种基于Sobel算子上改进的算法,其主要思想是先对图像进行全局阈值的分割处理,因为分割后的图像是二值图像,此时进行边缘提取,这就可以各个方向的边缘都可以检测到。但也可能会丢失原本直接用算子检测到的边缘。Sobel 算子的优点是方法简单、处理速度快, 并且所得的边缘光滑, 其缺点是
边缘较粗, 得到的边缘象素往往是分小段连续, 由于处理时需作二值化处理, 故得到的边缘与阈值的选取有很大的关系, 并且边缘图中梯度幅值较小的边缘也丢失了。为克服
这个缺陷,对 S( i, j)引入一个衰减因子 D, 用它去除计算的结果, 即
:
(,)
S i j=(3.1)
因此,用处理后的所得到图像与Sobel 算子直接对原始图像进行边缘检测的图像相加,这一步显得尤为重要。最后分别对数字图像和红外图像进行MATLAB 仿真,从仿真的结果可以看出,此算法具有较好的精度。
三次样条插值
Sobel 算子检测出像素级边缘后,为了得到亚像素级的边缘,要对灰度边缘图进行内插处理。插值算法有很多种,例如最近邻插值、双线性插值、三次样条插值等等。最近邻插值和双线性插值不如三次样条插值精度高。为了得到精度高的亚像素级边缘,本文采用三次样条插值法对灰度边缘图进行插值处理。下面先介绍三次样条插值函数的定义。
若函数S(x)满足:S(x)在每个子区间[xi-1, xi](i =1,2, …n)上是不高于三次的多项式,其中(a=x 0 (1) S(x) ,S ′(x) ,S ″(x)在[a,b]上连续。 (3.1) (2) 满足插值条件S(xi) =f(xi) (i =0,1, …,n) ,则称S(x)为函数f(x)关于节点x0,x1,…,xn 的三次样条插值函数。 在图像插值处理中,经常使用的三次样条插值函数S(ω)的数学表达式为 2323 1,1485,120,2()S ωωωωωωωωω?-+ ?-+-≤ ? ≥?? = (3.3) 这里,三次多项式S(ω)是对理论上的最佳插值函数sinc(ω)的逼近。 具体的做法是考虑一个浮点坐标(i +μ,j +v)周围的十六个邻点,目的像素c 的值 (i ,j v)f μ++可通过如下的插值公式得到: (i ,j v)f ABC μ++= (3.4) 其中: (1)()(1)(2)A S u S u S u S u ????=+-- (3.5) (1)()(1)(2)S v S v S v S v C +???? ? ???-??-?? = (3.6) (1,1)(1,)(1,1)(1,2)(,1)(,)(,1)(,2)(1,1)(1,)(1,1)(1,2)(2,1) (2,)(2,1)(2,2)f i j f i j f i j f i j f i j f i j f i j f i j f i j f i j f i j f i j f i j f i j f i j f i j B ----+-+????-++? ??? +-+++++? ? +-+++++?? = (3.7) 最大类间方差法(Ostu ) 对上述插值得到的图像进行二值化,从而得到边缘信息,其中阈值的选择是关键。这里采用最大类间方差法(也叫Otsu 法)自动确定阈值。该方法具有简单,处理速度快的特,是一种常用的阈值选取方法。其基本思想如下:设图像像素数为N ,灰度范围为[0,1]L -,对应灰度级i 的像素数为i N 几率为; /,0,1,2...1i i p n N i L ==- (3.8) 1 1L i i p -==∑ (3.9) 把图像中的像素按灰度值用阈值T 分成两类 01C C 和,0C 由灰度值在[0,T]之间的像素组成,1C 由灰度值在[+1,-1]T L 之间的像素组成,对于灰度分布几率,整幅图像的均值为; -1 =0 =L T i i u iP ∑ (3.10) 则01C C 和的均值为 00 =0 -1 11 =T+1 =/=/T i i L i i u iP u iP ωω∑∑ (3.11) 其中 0=0 L-1 10 =T+1 ===1-T i i i i P P ωωω∑∑ (3.12) 由上面式子可得: T 0011u =u +u ?? 类间方差的定义为: 222 B 00T 11T 2200T T 010011T 222 0011T 2 2 2 0011 0011220001110101 2 0101=u -u +u -u =u -u +u (+)-2(u +u )u =u +u -u =u +u -(u +u )=u (1-)+u (1-)-2u u =(u -u )σ?????????????????????()() () 让T 在[0,-1]L 范围内依次取值,使2 B σ最大的T 值为Otso 法的最佳阈值。 Matlab 中的graythresh 函数求取阈值采用的就是Otso 法 算法实现 由于经典Sobel 算子只有检测水平和垂直两个方向的3×3邻域模板,而实际图像边缘的方向会有8个方向。因此在Sobel 算子的基础上定义了8个方向模板,使模板表示的方向为图像的实际边缘方向。 在边缘检测时,将这8个模板分别与被检测图像中的3×3邻域进行卷积,取模板卷积结果中的最大值作为梯度幅度值,得到灰度边缘图G 。但是这样检测出的边缘仍然较粗,为了能够得到较细的边缘,我们引入衰减因子D 对计算的结果进行处理。因此最后得到的梯度幅度值为原来的1/ D,从而保留了较小的梯度幅度值,得到了不失真的灰度边缘图G ′。 Sobel 算子检测出像素级边缘后,为了得到亚像素级的边缘,要对灰度边缘图进行内插处理。为了得到精度高的亚像素级边缘,本文采用三次样条插值法对灰度边缘图进行插值处理。 插值后的灰度边缘图已经达到亚像素级,为了得到最后的二值边缘图,要对灰度边缘图进行阈值分割。在众多的阈值化分割算法中,最大类间方差法是性能评估最好的方法之一, Matlab中的graythresh函数来Matlab实现边缘检测。 实验结果 图3.6 衰减后灰度边缘图 图3.7 插值后灰度边缘图 图3.4 lena 原灰度图 图3.5改进sobel 算子提取的像素 图3.8 亚像素级边缘提取图(放大4 图3.9 原始灰度图 3.10 sobel算子的检测结果 图3.11基于灰度矩的亚像素边缘检测结果图 实验结果分析 上面是对120 120的lena图像分别进行像素级和亚像素级边缘检测的结果,如图3.5到3.8的所示的图,图3.5是采用经典sobel算子的像素级边缘检测结果,可以看出,采用Sobel 较难检测出有效的边缘。利用本文章法,图3.6是经sobel算子检测后引入衰减因子的灰度图像的边缘这里衰减因子取4,已检测出有效边缘:图3.7是图3.6灰度边缘图经三次样条插值后所得的图像,插值后灰度边缘图像图放大倍数4倍,可以看出插值后图像变得更加平滑,图3.7为图3.8的亚像素边缘提取图,可以看出亚像素边缘更清晰,定位精度更高,优于传统的边缘检测方法。 本章小结 本文设计了一种Sobel算子和三次样条插值结合起来的得到亚像素级边缘检测的方法,先用Sobel算子粗定位边缘,再用三次插值样条法对边缘图进行插值处理,获得 亚像素级边缘,最后利用最大类间方差法判断出边缘点,得到二值化的边缘图像。实验结果表明,该方法能精确定位目标边缘,优于传统方法的边缘检测方法,,有利于图像高精度测量和匹配的后续处理。 几种常用边缘检测算法的比较摘要:边缘是图像最基本的特征,边缘检测是图像分析与识别的重要环节。基于微分算子的边缘检测是目前较为常用的边缘检测方法。通过对Roberts,Sobel,Prewitt,Canny 和Log 及一种改进Sobel等几个微分算子的算法分析以及MATLAB 仿真实验对比,结果表明,Roberts,Sobel 和Prewitt 算子的算法简单,但检测精度不高,Canny 和Log 算子的算法复杂,但检测精度较高,基于Sobel的改进方法具有较好的可调性,可针对不同的图像得到较好的效果,但是边缘较粗糙。在应用中应根据实际情况选择不同的算子。 0 引言 边缘检测是图像分析与识别的第一步,边缘检测在计算机视觉、图像分析等应用中起着重要作用,图像的其他特征都是由边缘和区域这些基本特征推导出来的,边缘检测的效果会直接影响图像的分割和识别性能。边缘检测法的种类很多,如微分算子法、样板匹配法、小波检测法、神经网络法等等,每一类检测法又有不同的具体方法。目前,微分算子法中有Roberts,Sobel,Prewitt,Canny,Laplacian,Log 以及二阶方向导数等算子检测法,本文仅将讨论微分算子法中的几个常用算子法及一个改进Sobel算法。 1 边缘检测 在图像中,边缘是图像局部强度变化最明显的地方,它主要存在于目标与目标、目标与背景、区域与区域( 包括不同色彩) 之间。边缘表明一个特征区域的终结和另一特征区域的开始。边缘所分开区域的内部特征或属性是一致的,而不同的区域内部特征或属性是不同的。边缘检测正是利用物体和背景在某种图像特征上的差异来实现检测,这些差异包括灰度、颜色或纹理特征,边缘检测实际上就是检测图像特征发生变化的位置。边缘的类型很多,常见的有以下三种: 第一种是阶梯形边缘,其灰度从低跳跃到高; 第二种是屋顶形边缘,其灰度从低逐渐到高然后慢慢减小; 第三种是线性边缘,其灰度呈脉冲跳跃变化。如图1 所示。 (a) 阶梯形边缘(b) 屋顶形边缘 (b) 线性边缘 图像中的边缘是由许多边缘元组成,边缘元可以看作是一个短的直线段,每一个边缘元都由一个位置和一个角度确定。边缘元对应着图像上灰度曲面N 阶导数的不连续性。如果灰度曲面在一个点的N 阶导数是一个Delta 函数,那么就 经典图像边缘检测(微分法思想)——Sobel算子 2008-05-15 15:29Sobel于1970年提出了Sobel算子,与Prewitt算子相比较,Sobel算子对检测点的上下左右进一步加权。其加权模板如下: 经典图像边缘检测(微分法思想)——Roberts交叉算子 2008-05-14 17:16 如果我们沿如下图方向角度求其交叉方向的偏导数,则得到Roberts于1963年提出的交叉算子边缘检测方法。该方法最大优点是计算量小,速度快。但该方法由于是采用偶数模板,如下图所示,所求的(x,y)点处梯度幅度值,其实是图中交叉点处的值,从而导致在图像(x,y)点所求的梯度幅度值偏移了半个像素(见下图)。 上述偶数模板使得提取的点(x,y)梯度幅度值有半个像素的错位。为了解决这个定位偏移问题,目前一般是采用奇数模板。 奇数模板: 在图像处理中,一般都是取奇数模板来求其梯度幅度值,即:以某一点(x,y)为中心,取其两边相邻点来构建导数的近似公式: 这样就保证了在图像空间点(x,y)所求的梯度幅度值定位在梯度幅度值空间对应的(x,y)点上(如下图所示)。 前面我们讲过,判断某一点的梯度幅度值是否是边缘点,需要判断它是否大于设定的阈值。所以,只要我们设定阈值时考虑到加权系数产生的影响便可解决,偏导数值的倍数不是一个问题。 经典图像边缘检测(微分法思想)——Prewitt算子 2008-05-15 11:29 Prewitt算子 在一个较大区域中,用两点的偏导数值来求梯度幅度值,受噪声干扰很大。若对两个点的各自一定领域内的灰度值求和,并根据两个灰度值和的差来计算x,y的偏导数,则会在很 利用laplacian算子对图像进行锐化操作 人机交互实验报告 班级:计0905 姓名:车雨欣 学号:20091221018 利用laplacian算子对图像进行锐化操作Laplacian算子定义 Laplacian 算子是n维欧几里德空间中的一个二阶微分算子,定义为梯度()的散度()。因此如果f是二阶可微的实函数,则f的拉普拉斯算子定义为: (1) f的拉普拉斯算子也是笛卡儿坐标系xi中的所有非混合二阶偏导数: (2) 作为一个二阶微分算子,拉普拉斯算子把C函数映射到C函数,对于k ≥2。表达式(1)(或(2))定义了一个算子Δ: C(R) →C(R),或更一般地,定义了一个算子Δ : C(Ω) → C(Ω),对于任何开集Ω。 运算模板 函数的拉普拉斯算子也是该函数的黑塞矩阵的迹,可以证明,它具有各向同性,即与坐标轴方向无关,坐标轴旋转后梯度结果不变。如果邻域系统是4 邻域,Laplacian 算子的模板为: 0 1 0 1 -4 1 0 1 0 如果邻域系统是8 邻域,Laplacian 算子的模板为: 1 1 1 1 -8 1 1 1 1 前面提过,Laplacian 算子对噪声比较敏感,所以图像一般先经过平滑处理,因为平滑处理也是用模板进行的,所以,通常的分割算法都是把Laplacian 算子和平滑算子结合起来生成一个新的模板。图像 图像最基本的特征是边缘。所谓边缘是指周围像素有阶跃变化或屋顶状变化的那些象素的集合。他存在于目标与背景、目标与目标、区域与区域、基元与基元之间,因此他是图像分割所依赖的最重要的特征,他两边象素的灰度值有显著不同;其二是屋顶装边缘,他位于灰度值从增加到减少的变化转折点。 图像边缘检测 一种定位二维或三维图像(特别是医学图像)中的对象的边缘的系统。通过输入端(310)接收表示该图像的各元素值的数据元素集。该数据集被存储在存储装置(320)中。处理器(340)确定该图像中的对象的边缘。该处理器计算所述数据元素的至少一阶和/或二阶导数,并且计算该图像的等照度线曲率,所述曲率由κ 经典边缘检测算子比较 一 各种经典边缘检测算子原理简介 图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。灰度或结构等信息的突变处称为边缘。边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地方不一定能被检测出来,而检测出的边缘也不一定代表实际边缘。图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。 (a )图像灰度变化 (b )一阶导数 (c )二阶导数 基于一阶导数的边缘检测算子包括Roberts 算子、Sobel 算子、Prewitt 算子等,在算法实现过程中,通过22?(Roberts 算子)或者33?模板作为核与图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。拉普拉斯边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。一种改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是LOG 算子。前边介绍的边缘检测算子法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数的过零点。Canny 算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。 1 Roberts (罗伯特)边缘检测算子 景物的边缘总是以图像中强度的突变形式出现的,所以景物边缘包含着大量的信息。由于景物的边缘具有十分复杂的形态,因此,最常用的边缘检测方法是所谓的“梯度检测法”。 设(,)f x y 是图像灰度分布函数; (,)s x y 是图像边缘的梯度值;(,)x y ?是梯度的方向。则有 [][]{} 1 2 22 (,)(,)(,)(,)(,)s x y f x n y f x y f x y n f x y = +-++- (1) (n=1,2,...) [][]{}1 (,)tan (,)(,)/(,)(,)x y f x y n f x y f x n y f x y ?-=+-+- (2) 数字图像处理课程设计报告题目数字图像课程设计—各边缘检测算子的对比 系别电气系 班级xxxxxxxxxxxxx学号xxxxxxxxxxxx 姓名xxxx指导老师xxxx 时间xxxxxxx 目录 一、课题设计的任务 (3) 1.1 课题选择 (3) 1.2 课题设计的背景 (3) 二、课题原理简介 (3) 三、经典边缘检测算子性能比较及程序 (6) 3.1MATLAB程序仿真 (6) 3.2实验结果的比较 (10) 四、实验结论 (11) 五、参考文献 (11) 一、课题设计的任务 1.1课题选择 各边缘检测的对比 1.2 课题设计的背景 我们感知外部世界的途径主要是听觉和视觉。而视觉主要是获取图像的信息,例如图片的特征和周围的背景区域的差别。这种灰度或结构等信息的突变,就称之为边缘。图像的边缘对人类视觉而言具有重要意义,有些差别很细微,人眼很难观察,这时就需要计算机图像处理技术,物体边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘。 本次我的课程设计就利用了MATLAB软件,通过实验,对各边缘检测算子进行了对比和研究,例如基于一阶导数的边缘检测算子Roberts算子、Sobel算子,基于二阶导数的拉普拉斯算子,canny边缘检测算子等。并且在4天内完成了课程设计作业,基本达到既定要求。 二、课题原理简介 边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。检测出的边缘并不等同于实际目标的真实边缘。图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。 (a)图像灰度变化(b)一阶导数(c)二阶导数 下面是一些主要的边缘检测算子的原理介绍 1 Roberts(罗伯特)边缘检测算子 景物的边缘总是以图像中强度的突变形式出现的,所以景物边缘包含着大量的信息。由于景物的边缘具有十分复杂的形态,因此,最常用的边缘检测方法 是所谓的“梯度检测法”。设(,) s x y是图像边缘的 f x y是图像灰度分布函数;(,) 是梯度的方向。则有 梯度值;(,) x y 姓名:学号:班级: 实验日期:实验成绩: 一.实验目的 (1)学习如何用锐化处理技术来加强图像的目标边界和图像细节,对图像进行梯度算子、拉普拉斯算子、Sobel算子设计,使图 像的某些特征(如边缘、轮廓等)得以进一步的增强及突出。(2)分析模板大小对空域锐化滤波的影响,比较不同滤波器的处理效果,分析其优缺点。 二.实验原理 锐化处理的主要目的是突出灰度的过度部分,在空间域中,均值滤波类似于积分,那锐化滤波类似于微分,微分算子的响应程度与图像在用算子操作的这一点突变程度成正比,图像积分模糊了图像,同时起到了消除噪声的作用;图像微分增强边缘和其它突变(如噪声),而削弱灰度变换缓慢的区域,laplacian算子类似于二阶微分,强调的是图像灰度级剧烈变换的部分,而sobel算子类似于一阶微分,强调的是图像灰度级缓慢变化的部分。 三.实验内容及结果 (1)选择一副图像,分别使用拉普拉斯算子、sobel算子对图像进行锐化滤波,并观察滤波效果。 图 1 laplacian及sobel算子处理图像 (2)选择一副图像,构造一个中心系数为-24的5×5的类似于拉普拉斯模板对图像进行锐化,与上述拉普拉斯算子的结果相比,是否能得到更加清晰的结果? 图 2 不同大小laplacian模板处理原图及二值图 四.结果分析 (1)观察图一,可以发现对原图进行sobel算子运算后,原图阶梯的边缘细节被突显出来了,而每个阶梯灰度级保持不变的背景则没了,全变黑了,而对原图进行laplacian算子运算后,边缘部分则只剩下些杂乱无章的点了,基本是在sobel算子运算过后筛选出来的缓慢突变边缘上的一些突变更快的点。如果把sobel算子比作是一阶微分就不难理解它是对原图的缓慢边缘变化部分,而把laplacian算子比作是二阶微分的话,就是原图的剧烈突变部分,由于原图像的阶梯边缘在灰度级上是缓慢过度的,所以使用sobel算子边缘的突出效果更明显,而laplacian算子无论模板大小为多大,都不能清晰的显示出边缘。至于背景为什么会变黑是因为算子模板中有负因子,当计算的出来的值为负数时,自动标定其为0,也就是黑色。 (2)观察图二,可以发现对原图使用无论多大的laplacian模板,效果都很差,原因就是上述提到的原图像的边缘灰度级是缓慢变化的,对原图灰度级二值化处理,由于灰度值大小只有0和1两个值,阶梯边缘两边的值分别为0和1,这样边缘突变就成了一个单位的剧烈突变,所以3*3的laplacian算子效果就和上述的sobel算子效果相似,而当增加laplacian算子的大小到5*5时,边缘检测效果更加明显。正印证了微分算子的响应程度与图像在用算子操作的这一点突变程度成正比这一原理。 经典边缘检测算子比较 张丽 南京信息工程大学信息与计算科学系,南京210044 摘要:图像边缘检测技术是图像分割、目标识别、区域形态提取等图像分析领域中十分重要的基础。本文简要介绍各种经典图像边缘检测算子的基本原理,用Matlab仿真实验结果表明各种算子的特点及对噪声的敏感度,为学习和寻找更好的边缘检测方法提供参考价值。 关键字:图像处理;边缘检测;算子;比较 引言 图像的边缘时图像最基本的特征之一。所谓边缘(或边沿)是指周围像素灰度有阶跃性变化或“屋顶”变化的那些像素的集合。边缘广泛存在于物体与背景之间、物体与物体之间、基元与基元之间,因此它是图像分割依赖的重要特征。图像边缘对图像识别和计算机分析十分有用,边缘能勾划出目标物体,使观察者一目了然;边缘蕴含了丰富的内在信息(如方向、阶跃性质、形状等)。从本质上说,图像边缘是图像局部特性不连续性(灰度突变、颜色突变、纹理结构突变等)的反应,它标志着一个区域的终结和另一个区域的开始。 边缘检测技术是所有基于边界分割的图像分析方法的第一步,首先检测出图像局部特性的不连续性,再将它们连成边界,这些边界把图像分成不同的区域,检测出边缘的图像就可以进行特征提取和形状分析。为了得到较好的边缘效果,现在已经有了很多的边缘检测算法以及一些边缘检测算子的改进算法。但各算子有自己的优缺点和适用领域。本文着重对一些经典边缘检测算子进行理论分析、实际验证并对各自性能特点做出比较和评价,以便实际应用中更好地发挥其长处,为新方法的研究提供衡量尺度和改进依据。 一各种经典边缘检测算子原理简介 图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。灰度或结构等信息的突变处称为边缘。边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地 一、实验目的: ①掌握图像锐化的概念; ②掌握Prewitt 算子对图像进行锐化的原理、过程; ③熟悉Matlab 编程。 二、实验内容: ①利用Prewitt 算子对图像进行锐化处理; ②掌握Maltab 中和图像锐化相关的函数。 三、实验原理: ①利用Prewitt 算子对图像进行锐化处理; ②掌握Maltab 中和图像锐化相关的函数。 三、实验原理: 图像锐化处理是改善图像视觉效果的手段,用来对图像的轮廓或边缘进行增强,减弱或消除低分频率分量而不影响高频分量。图像锐化处理的主要技术体现在空域和频域的高通滤波,而空域高通滤波主要用模版卷积来实现。 (一)梯度算子法 在图像处理中,一阶导数通过梯度来实现,因此利用一阶导数检测边缘点的方法就称为梯度算子法。梯度值正比于像素之差。对于一幅图像中突出的边缘区,其梯度值较大;在平滑区域梯度值小;对于灰度级为常数的区域,梯度为零。 下面给出的平滑梯度算子法具有噪声抑制作用。 1、Prewitt 梯度算子法(平均差分法) 因为平均能减少或消除噪声,Prewitt 梯度算子法就是先求平均,再求差分来求梯度。水平和垂直梯度模板分别为: 利用检测模板可求得水平和垂直方向的梯度,再通过梯度合成和边缘点判定,就可得到平均差分法的检测结果。 四、实验步骤: I=imread('Miss.bmp'); figure; imshow(I); title('原始图像'); II=eye(258,258); for i=2:257 for j=2:257 ??????????---=?101101101x d ??????????---=?111000111y d 边缘检测算子比较 不同图像灰度不同,边界处一般会有明显的边缘,利用此特征可以分割图像。需要说明的是:边缘和物体间的边界并不等同,边缘指的是图像中像素的值有突变的地方,而物体间的边界指的是现实场景中的存在于物体之间的边界。有可能有边缘的地方并非边界,也有可能边界的地方并无边缘,因为现实世界中的物体是三维的,而图像只具有二维信息,从三维到二维的投影成像不可避免的会丢失一部分信息;另外,成像过程中的光照和噪声也是不可避免的重要因素。正是因为这些原因,基于边缘的图像分割仍然是当前图像研究中的世界级难题,目前研究者正在试图在边缘提取中加入高层的语义信息。 课题所用图像边缘与边界应该算是等同的。 在实际的图像分割中,往往只用到一阶和二阶导数,虽然,原理上,可以用更高阶的导数,但是,因为噪声的影响,在纯粹二阶的导数操作中就会出现对噪声的敏感现象,三阶以上的导数信息往往失去了应用价值。二阶导数还可以说明灰度突变的类型。在有些情况下,如灰度变化均匀的图像,只利用一阶导数可能找不到边界,此时二阶导数就能提供很有用的信息。二阶导数对噪声也比较敏感,解决的方法是先对图像进行平滑滤波,消除部分噪声,再进行边缘检测。不过,利用二阶导数信息的算法是基于过零检测的,因此得到的边缘点数比较少,有利于后继的处理和识别工作。 各种算子的存在就是对这种导数分割原理进行的实例化计算,是为了在计算过程中直接使用的一种计算单位; Roberts算子:边缘定位准,但是对噪声敏感。适用于边缘明显且噪声较少的图像分割。Roberts边缘检测算子是一种利用局部差分算子寻找边缘的算子,Robert算子图像处理后结果边缘不是很平滑。经分析,由于Robert算子通常会在图像边缘附近的区域内产生较宽的响应,故采用上述算子检测的边缘图像常需做细化处理,边缘定位的精度不是很高。Prewitt算子:对噪声有抑制作用,抑制噪声的原理是通过像素平均,但是像素平均相当于对图像的低通滤波,所以Prewitt算子对边缘的定位不如Roberts算子。 Sobel算子:Sobel算子和Prewitt算子都是加权平均,但是Sobel算子认为,邻域的像素对当前像素产生的影响不是等价的,所以距离不同的像素具有不同的权值,对算子结果产生的影响也不同。一般来说,距离越远,产生的影响越小。 Isotropic Sobel算子:加权平均算子,权值反比于邻点与中心点的距离,当沿不同方向检测边缘时梯度幅度一致,就是通常所说的各向同性。 在边沿检测中,常用的一种模板是Sobel 算子。Sobel 算子有两个,一个是检测水平边沿的;另一个是检测垂直平边沿的。Sobel算子另一种形式是各向同性Sobel(Isotropic Sobel)算子,也有两个,一个是检测水平边沿的,另一个是检测垂直平边沿的。各向同性Sobel 算子和普通Sobel算子相比,它的位置加权系数更为准确,在检测不同方向的边沿时梯度的幅度一致。由于建筑物图像的特殊性,我们可以发现,处理该类型图像轮廓时,并不需要对梯度方向进行运算,所以程序并没有给出各向同性Sobel算子的处理方法。 由于Sobel算子是滤波算子的形式,用于提取边缘,可以利用快速卷积函数,简单有效,因此应用广泛。美中不足的是,Sobel算子并没有将图像的主体与背景严格地区分开来,换言之就是Sobel算子没有基于图像灰度进行处理,由于Sobel算子没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。在观测一幅图像的时候,我们往往首先注意的是图像与背景不同的部分,正是这个部分将主体突出显示,基于该理论,我们可以给出阈值化轮廓提取算法,该算法已在数学上证明当像素点满足正态分布时所求解是最优的。 源程序如下:#include 前言 Preface 感您使用燃烧控制研究院生产的就地点火控制柜装置。 本公司的就地点火控制柜装置是燃烧控制研究院自主开发生产的高品质就地控制装置,在使用系列本程控装置之前请您仔细阅读该手册以保证正确使用并充分发挥其优越性。 本说明书对就地控制柜(以下简称控制柜)的操作和安装方法等做了详细的介绍。使用控制柜以前,在阅读本说明书的基础上,进行安全正确使用。Thank you for choosing the Local Ignition Control Cabinet designed by our company. The local ignition control device is explored by our company for the ignition control of boiler. This manual describes installation and operation of the cabinet clearly, please read this manual before using. 容介绍Brief introduction 本手册介绍了点火控制柜的组成、安装、配线、功能参数、日常使用维护及对故障的处理 The manual includes the cabinet’s components, installation, wiring, data, maintenance, and troubleshooting. 读者对象Applicable readers 本书适合下列人员阅读This manual is applicable for 设备安装人员、维护人员、设计人员 Installer, maintenance man, and designer 本书约定Stipulation 符号约定Symbol stipulations 说明提醒操作者需重点关注的地方 Points operator should pay attention to 由于没有按要求操作可能造成死亡或重伤的场合危险! This symbol indicates death or GBH that may occur as a result 第07卷2007盔第06期 06月 V01.7 June No06 2007 对人脸边缘检测的几种算子实验比对 王晓红熊盛武 摘要:对于图像处理的一个研究分支一人脸识别与检测,自美国“9.11”事件后被广泛重视,并正在从实验室走向商业化。在这个过程中,科技工作者们有着众多不同的尝试方式,本文就一些经典的算法公式,选择不同的算子,通过MATLAB语言表现出来。 关键词:模式识别图像处理人脸检测算子 中图分类号:TP391.41文献标识码:A文章编号:1006-7973(2007)06-0145-02 一、前言 纵观人类历史,从制造简单的工具,到钻木取火;从四大发明到蒸汽机的使用;作为万物之灵的人类还制造了汽车、飞机、无线电、太空船…..直到一九四六年第一台计算机的出现,人类所发明的工具才真正有了和人类自身大脑作比较的工具一电脑!人类一直梦想着更接近于人的电脑来沿伸人 类大脑的工作。这就有了“fifthgenerationcomputer'’,这是日本在上世纪八十年代初制定的国家十年计划的目标:听得懂话,可识别图像,可以自我学习、可以判断和思考等等具有智能的计算机。可是时间已经过去了二十多年了,这个目标还没有实现。说明还有许多技术上的瓶颈还有待突破。想要让计算机做到以前只能由人类才能做到的事情,具备人的智能,具有对各种事件进行分析、判断的能力,还有很多的路要走。下面仅从识别图像这个方向来探讨人脸的识别。 二、人脸识别的发展现状 生物特征的识别技术从20世纪末兴起,伴随计算机硬件和信息技术的飞速发展使得地球变成了“地球村”,经过使人震惊的“9?11”事件后,现代社会对身份识别提出了更多、更高的要求。生物识别在图像识另Ⅱ领域也受到了空前的重视。生物识别技术已经在商业方面有了许多应用,并有不断纵深的趋势。据国际生物集团(InternationalBiometricGroup,IBG)的统计:到2007年将达到40亿美元。并且美国在“9?11”遇袭事件后,连续签署了3个国家安全法案(爱国者法案、航空安全法案、边境签证法案),要求必须采用生物认证技术。这对生物识别技术的应用起到了推波助澜的作用。 所谓生物特征的识别(BiometricIdentificationTechnology),就是利用人所特有的生物特征,包括生理特征和行为特征,用这些特征来进行人的身份鉴别。常用的有:脸相、虹膜、指纹、掌纹等;常用的行为特征包括:声音、笔迹、步姿等。生物特征具有以下一些特点:比如说人都有手掌,但每个人的掌纹都不一样,且这种独有的唯一的特征并不随时间变化而变化;在实际的应用中,人类特有的这些特征是可采集的,人脸的识别正是符合了这样一些特点,并且人脸识别的特点是以人为准,最大程度地确保了鉴别的可靠性。 三、人脸识别与其它识别技术的区别 在这些识别技术中,人脸识别技术(FaceRecognitionTechniques,FRT)是采用人的面部特征来确定一个人身份的,是生物特征识别技术的一个主要方向。和其他生物特征比,人脸特征的提取更具有主动、友善、无打扰等优点,基于这些特点,人脸识别技术才成为被广泛使用的方法。但是,人脸不是一成不变的,同一个人在不同的年龄段会有变化,另外光线、姿势、面部表情、面部附属物(如胡子、眼镜)等变化的影响,人脸的识别的准确度会大打折扣。就目前而言,大多的人脸识别系统还远未达到人类婴幼儿的识别能力,因此,人脸识别还有许多工作可做。 四、人脸识别方法之一——人脸检测的边缘检测方法 人脸识另lj技术包涵的内容很多,如模式识别、图像处理、计算机视觉、计算机图形学、各种数学算法的引用等等。 对于人脸的识别其首要目的是能够在图片中检测出来人脸来,即人脸检测,而人脸的检测最重要的是对其边缘的提取。图像的边缘点产生的原因虽然不同,但归根结底都是由于图像的灰度不连续或者灰度急剧变化的所造成的,利用这个特性,我们可以采用微分运算,得到边缘点,从而得到人脸的轮廓。 边缘检测是根据图像的灰度值或者色彩的急剧变化的特点,采用各种微分运算进行边缘检测的。下面就几种微分法进行理论比较。 首先需要介绍微分的原理: Af(i,j)=[,(?+1,j)一f(i,j)】十[厂(j,J+1)一f(i,j)】 m¨=誓+熹 为方便编程离散化后的差分方程为: 收稿日期:2007—3—21 作者简介:王晓红女武汉理工大学硕士研究生武汉商业服务学院讲师熊盛武男武汉理工大学教授博导 万方数据 基于偏微分方程的图象处理课程设计 (2014年秋季学期) 学院 专业信息与计算科学 班级信计12-1班 名称基于Sobel算子的图像锐化 组员 指导教师 2014 年月日 一、目的与要求 《图像处理》就是信息与计算科学专业一门重要的基础课程之一,它主要应用在医疗、生物等学科的图象处理方面,就是当今社会发展较为迅速的一门技术。课程设计的一个重要的环节就是实践环节,主要锻炼学生的动手能力,以及团队能力,独立思考能力等。 二、设计的方案 2、1模型的建立 Sobel算子 (加权平均差分法) Sobel算子就是典型的基于一阶导数的边缘检测算子,由于该算子中引入了类似局部平均的运算,因此对噪声具有平滑作用,能很好的消除噪声的影响。Sobel算子包含两组3x3的矩阵,分别为横向及纵向模板,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。实际使用中,常用如下两个模板来检测图像边缘。 -1 0 1 与一些传统的图像锐化方法相比,基于sobel 算子的锐化在诸多方面都得到了改进,这些也成了sobel 算子发展的有力保证,sobel 算子的具体定义如下: Dx=[f(x+1,y-1)-f(x-1,y-1)]+2[f(x+1,y)-f(x-1,y)]+[f(x+1,y+1)-f(x-1,y+1)], Dy=[f(x-1,y+1)-f(x-1,y-1)]+2[f(x,y+1)-f(x,y-1)]+[f(x+1,y+1)-f(x+1,y-1)]、 Sobel 算子也可用模版表示,如图2所示,模版中的元素表示算式中相应像素的加权因子。 101202102-????-????-?? 121000121---?????????? 图2 2、2模型的实现 由于sobel 算子就是相隔两行或两列之差分,故边缘两侧元素得到增强,同时由于sobel 算子引入了平均元素,对图像中的随机噪声有一定的平滑作用,所以离散化采用sobel 算子,同时以sobel 算子较强的锐化作用达到锐化目的 三、主要实现程序 ( MATLAB ) 命令: >> W_H1=[-1,0,1;-2,0,2;-1,0,1]; >> W_H2=[-1,-2,-1;0,0,0;1,2,1]; >> T=0、165; >> L=imread('1、bmp','bmp'); >> %L=imread('1、tif','tif'); >> [height,width]=size(L); >> L1=double(L); >> L2=zeros(height+2,width+2); >> L2(2:height+1,2:width+1)=L1; >> for i=2:height+1 for j=2:width+1 sum1=0; sum2=0; for m=-1:1 for n=-1:1 课程设计任务书 学院信息科学与工程专业电子信息工程 学生姓名*** 班级学号09******* 课程设计题目图像边缘检测算子 课程设计目的与要求: 设计目的: 1.熟悉几种经典图像边缘检测算子的基本原理。 2.用Matlab编程实现边缘检测,比较不同边缘检测算子的实验结果。设计要求: 1.上述实验内容相应程序清单,并加上相应的注释。 2.完成目的内容相应图像,并提交原始图像。 3.用理论对实验内容进行分析。 工作计划与进度安排: 2012年 06月29 日选题目查阅资料 2012年 06月30 日编写软件源程序或建立仿真模块图 2012年 07月01 日调试程序或仿真模型 2012年 07月01 日结果分析及验收 2012年 07月02 日撰写课程设计报告、答辩 指导教师: 2012年 6月29日专业负责人: 2012年 6月29日 学院教学副院长: 2012年 6月29日 摘要 边缘检测是数字图像处理中的一项重要内容。本文对图像边缘检测的几种经典算法(Roberts算子、Sobel算子、Prewitt算子)进行了分析和比较,并用MATLAB实现这几个算法。最后通过实例图像对不同边缘检测算法的效果进行分析,比较了不同算法的特点和适用范围。 关键词:图像处理;边缘检测;Roberts算子;Sobel算子;Prewitt算子 目录 第1章相关知识.................................................................................................... IV 1.1 理论背景 (1) 1.2 数字图像边缘检测意义 (1) 第2章课程设计分析 (3) 2.1 Roberts(罗伯特)边缘检测算子 (3) 2.2 Prewitt(普瑞维特)边缘检测算子 (4) 2.3 Sobel(索贝尔)边缘检测算子 (5) 第3章仿真及结果分析 (7) 3.1 仿真 (7) 3.2 结果分析 (8) 结论 (10) 参考文献 (11) 颜色英文对照表 beige 米色 black 黑色 brown 咖啡色 cream 雪白 khaki 卡其色 grey 灰色 navy 丈青色 offwhite 灰白色palegoldenrod 苍麒麟色palegreen 苍绿色paleturquoise 苍绿色palevioletred 苍紫罗蓝色pansy 紫罗兰色papayawhip 番木色peachpuff 桃色 peru 秘鲁色 pink 粉红 plum 杨李色powderblue 粉蓝色purple 紫色 red 红色 rosybrown 褐玫瑰红royalblue 宝蓝色rubine 宝石红saddlebrown 重褐色salmon 鲜肉色 salmon pink 橙红色sandy beige 浅褐色sandybrown 沙褐色sapphire 宝石蓝 scarlet 猩红色seagreen 海绿色seashell 海贝色shocking pink 鲜粉红色sienna 赭色 silver 银白色 skyblue 天蓝色slateblue 石蓝色slategray 灰石色 smoky gray 烟灰色snow 雪白色springgreen 春绿色steelblue 钢蓝色 tan 茶色 teal 水鸭色 thistle 蓟色 tomato 番茄色 turquoise 青绿色 turquoise blue 翠蓝色 violet 紫色 wheat 浅黄色 white 白色 wheat 土黄色 whitesmoke 烟白色 winered 葡萄酒红 yellow 黄色 yellowgreen 黄绿色 Natural color;begin colour 自然色Primary colour;fundamental colour 原色Pure colour 纯色 Complementary colour 补色 Fashion colour;trend colour 流行色 Inter colour 国际流行色 Essential colour 基本色 Similar colour 同类色 Multicolour 多种色彩 Full colour 彩色 Plain colour 素色 Secondary color 混合色 Contract colour 对比色 Cold colour 冷色 Warm colour 暖色 Neutral colour;intermedium colour 中间色Soft colour 柔和色 Rich in colour 浓色 Advancing colour 前进色 Receding colour 后退色 Expansive colour 膨胀色 Contracting colour 收缩色 Ground colour 底色 Surface colour 表面色 Transparent color 透明色 Metal colour 金属色 Accent colour 强调色 Colour matching;colour combination 配色Colour mixing 调色 图像的锐化 摘要:图像平滑往往使图像中的轮廓变得模糊,为了减少这类不利影响,这就需要利用图像锐化技术,使图像的边缘变的清晰。本文分析了图像锐化方法中的梯度算子法和二阶导数算子法的各自特点,其中梯度算子法主要是Roberts 梯度算子法、Prewitt 梯度算子法、Sobel 算子法;二阶导数算子法为Laplacian 算子法,并通过编程对一张实际图片进行了试验对比,结果证明Laplacian 算子法锐化效果最好。 引言 图像平滑往往使图像中的边界、轮廓变得模糊,为了减少这类不利效果的影响,这就需要利用图像锐化技术,使图像的边缘变的清晰。图像锐化处理的目的是为了使图像的边缘、轮廓线以及图像的细节变的清晰,经过平滑的图像变得模糊的根本原因是因为图像受到了平均或积分运算,因此可以对其进行逆运算(如微分运算)就可以使图像变的清晰。从频率域来考虑,图像模糊的实质是因为其高频分量被衰减,因此可以用高通滤波器来使图像清晰。图像锐化处理的主要技术体现在空域和频域的高通滤波,而空域高通滤波主要用模版卷积来实现。 1、梯度算子法 在图像处理中,一阶导数通过梯度来实现,因此利用一阶导数检测边缘点的方法就称为梯度算子法。梯度值正比于像素之差。对于一幅图像中突出的边缘区,其梯度值较大;在平滑区域梯度值小;对于灰度级为常数的区域,梯度为零。 1.1、Roberts 梯度算子法 Roberts 梯度就是采用对角方向相邻两像素之差,故也称为四点差分法。对应的水平和垂直方向的模板为: 标注 的是当前像素的位置(i,j)为当前像素的位置,其计算公式如下: ??????-=? 1001x G ??????-=?0110y G ? 经典边缘检测算子比较 一 各种经典边缘检测算子原理简介 图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。灰度或结构等信息的突变处称为边缘。边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地方不一定能被检测出来,而检测出的边缘也不一定代表实际边缘。图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。 (a )图像灰度变化 (b )一阶导数 (c )二阶导数 基于一阶导数的边缘检测算子包括Roberts 算子、Sobel 算子、Prewitt 算子等,在算法实现过程中,通过22?(Roberts 算子)或者33?模板作为核与图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。拉普拉斯边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。一种改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是LOG 算子。前边介绍的边缘检测算子法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数的过零点。Canny 算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。 基于S o b e l算子的数字图像边缘检测 集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988) 信号处理综合 设计报告 综合设计名称:基于Sobel算子的数字图像边缘检测学员:学号: 培养类型:技术类年级: 2013级专业:电子工程所属学院: 指导教员:职称:教授实验室: 305-507 实验日期:-2016.9.2 一、综合设计目的 (1)掌握数字信号处理的基本概念、基本理论和基本方法; (2)了解边缘检测的算法和用途,学习利用 Sobel 算子进行边缘检测的程序设计方法; (3)完成图像边缘处理系统的设计和实现,分析处理性能; (4)学会TMS320VC5509A DSP的程序设计方法。 二、综合设计要求 (1)在Matlab上独立编程实现通过Sobel算子的边缘检测; (2)读懂DSP-CCS平台例程,自选图像修改例程实现边缘检测,对比Matlab仿真和DSP-CCS平台处理的结果。 (3)完成实验思考题 三、详细设计过程 1.设计原理分析; Sobel边缘检测算子: 图像中的每个点都用这连个核做卷积,一个核对通常的垂直边缘相应最大,另一个对水平边缘相应最大。两个卷积的最大值作为该点的输出位(下文我们统称为梯度)。 Prewitt边缘检测算子: 以上两个卷积核形成了Prewitt算子。使用方法和Sobel算子一致,区别是系数不同。 2.设计方案和过程。 总体方案: (1)选择图像灰度处理 这是程序运行的预处理,需要注意的Matlab仿真时,图像选取限制较小,在DSP-CCS平台处理时,注意图像选择要满足例程的空间要 求,一般选择80*80尺寸图像。 (2)卷积计算得出梯度 把图像与Sobel算子的两个模板分别进行卷积,取卷积后较大值为 该点的梯度。 上图显示了在只考虑水平边缘或垂直边缘的情况下的检测效果与实际效果的对比。 (3)二值处理计算阈值 把计算出的梯度归一化,然后带入Matlab中的graythresh函数,采用最大类间方差法获得阈值。 (4)高于阈值设为1,低于阈值设为0。把二值图像显示出来即为边缘检测的最终结果。 3.改进与创新 (1)八方向Sobel算子 在原有中两个模板的基础上,又增加六个方向的模板,即45°,135°,180°,225°,270°,315°。这样可以更加有效地检测图像多个方向边缘,使边缘信息更加完整。 (2)抗噪性能分析 通过在原图像中加入不同信噪比的高斯白噪声,观察边缘检测图像的变化,分析差别。几种常用边缘检测算法的比较
经典图像边缘检测
利用laplacian算子对图像进行锐化操作
Sobel边缘检测算子
数字图像课程设计报告:边缘检测算子的比较
实验报告四图像锐化处理
经典边缘检测算子对比
图像处理实验报告-图像锐化
边缘检测算子比较
sobel算子边缘检测
中英文对照说明书
对人脸边缘检测的几种算子实验比对
基于Sobel算子的图像锐化偏微分方程图像处理
图像边缘检测算子
颜色英文对照表
图像锐化的方法及比较
Sobel边缘检测算子
基于Sobel算子的数字图像边缘检测