电动车控制器设计.doc222
第一章绪论
1.1 课题的研究意义
电动自行车在上世纪60年代就开始研制,然而生不逢时。上煎纪90年代,在环保和节能潮流游的推动下,电动自行车再次展现出新的生机。电动自行车的出现和普及,缓解了城市的交通压力,绘人们的出行带来了极大的方便,具有良好的社会意义。它的作用主要表现在以下几个方面:
1、为人们提供一种灵活机动的出行交通工具
随着改革开放的深入,几乎所有城市都在规划市政蓝图,市区范围迅速向农村伸展,城市的交通压力越来越大;同时农村“村村通公路"政策的实施,使人们出行里程明显增加。因此合适的交通工具的出现反映了这种市场需求, 90年代初燃油助力车的火爆旺销现象就是这种供求关系的证明。
国外人们出行普遍选择小汽车,而在中国,只有少数人才能买的起小汽车,而绝大多数人还不具备买小汽车的经济能力。同时燃油价格的飞速上涨,停车库位的紧张也阻碍了人们对小汽车的购买力。摩托车曾一度成为人们理想的出行工具,但我国城市道路的严重不足,一般城市很难大量接纳卡车、轿车甚至摩托车,很多城市都已经“禁摩”。电动自行车具有摩托车的优点,速度、外观、乘载货物都能与摩托车相媲美,且轻便灵活、价格适中、嗓音低,在行进过程中基本不会发生交通堵塞的情况。因此在摩托车受限制的情况下,从市政、交通、收入等客观现状来看,选择电动自行车出行是市民比较理想的交通王具之一。
2.节能环保,缓解能源紧张问题
能源紧张、环境污染、大气污染已是全球性的问题,而我国尤为严重,人口占世界20%,石油储藏量仅占l.8%,目前社会经济高速发展,对石油能源需求很大,电动自行车“以电代油",是未来交通的发展方向。
如果以电动自行车代替摩托车,可以做如下计算:一辆摩托车的l00公里油耗以2公升计算,年平均行驶l万公里,以8年寿命计算,每辆摩托车的总油耗为l.184吨。全国年产1000万辆电动自行车,就为社会带来的油料节约高达量1184万吨。
每辆摩托车年耗油200公升,汽油以每公升4元计算,8年期内的总能源支出为6400元;电动自行车每百公里电耗约1.2度,年行驶l万公里,总电量为120度,每度电以O.5元计算,则8年内的总支出为480元,仅为摩托车油费支出的7.5%,节约费用高达5920元,以年产lOOO 万辆计算,电动自行车为人民群众节约能源支出总值达592亿元。
燃油尾气是大气污染的主要因素,尤其是燃油机动车辆的尾气排放。电动自行车采用电能驱动,不产生任何有害气体,这是小汽车和摩托车无法比拟的。
计算一辆摩托车的尾气排放情况,以较高水平的欧II标准限值保守估算,每公里有害物质净值排放分别为:一氧化碳5.5克,碳氢化合物1.2克,氮氧化合物O.3克,仅此三项合计为7克。年行驶1万公里,则排放有害物质净值70千克,8年寿命则总排放560千克。由此可以,以电动自行车车代替摩托车的环境收益巨大。以2005年为例,全国总产量若为1000万辆,则其环境总效益为:“减少有害物质总排放560万吨”。
3.电动自行车产业潜在市场巨大
中国发展电动车具有独特的有利条件。其中,一个非常重要的因素是市场。中国人口众多,具有世界最庞大的自行车市场。目前自行车拥有量为4亿多辆,如把10%的自行车换成电动自行车,就需4000万辆电动自行车,以每辆均价500元计算,就是60个亿,这是一个巨大的市场。
1999年5月国家质量技术监督局发布了《电动自行车通用技术条件》国家标准,为电动
自行车规模化生产提供了条件,经过2003、2004年连续两年的快速发展,中国电动自行车行业呈现出一片欣欣向荣的景象。2005年全行业电动自行车产销量在1200万辆左右,对比2004年增长率在15%-20%左右,销售规模达到150亿元。从全球市场上看日本雅马哈、本田、三洋、松下等知名公司纷纷进入电动自行车行业且日益扩大生产规模;德、英、奥、意、美等国著名的自行车厂商和公司在也纷纷加入。可以说,电动自行车产业有着非常广阔的应用前景。
1.2 电动自行车的现状
目前我国市场上国产电动自行车的品种规格较多,驱动多数用有刷或无刷的轮式直流电机,工作电压为24V、36V和48V,功率在150W~400W之间;蓄电池一般用的是免维护铅酸电池,容量为12AH,充电时间在3~8小时之间,充电一次行驶里程约50km,车速低于20km/h,爬坡能力在4度以下;车型有简易型和豪华型,车重约35kg,载重量约70kg,百公里耗电量1KW左右。
1.2.1 电动自行车的构成
电动自行车主要由四个部分组成:车架、电源(蓄电池)、电机和控制器。车架部分不作讨论,其他部分介绍如下:
1.电源(蓄电池)
电源为电动自行车动力系统及控制系统提供能量。蓄电池的电能容量、伏安特性、寿命等质量因素对整个动力系统有非常大的影响阳1。目前电动自行车用蓄电池基本是经济实惠的铅酸电池。大多数电动自行车采用48V12AH、36V12AH铅酸电池,24V12AH的电池由于续行里程较短,选择得比较少。环保效能更好的镍氢电池和锂电池则因为成本较高,导致配载这两种电池的电动自行车售价偏高。
如果其成本有所下降,进而降低车的售价,那么以配载锂电池与镍氢电池为主的电动自行车将会大面积普及。燃氢电池、纳米碳管蓄能高、寿命长、性能优良但成本高昂,随着科技的发展,它们将是未来电动自行车动力源的发展方向。
2.电机.
电气技术发展到今天,各种电机的生产控制技术已经相当成熟,电动自行车电机有多种可以选择,但普遍选择的还是有刷直流电动机和无刷直流电动机(BLDCM)。采用这两种电机的原因在于它们的控制方法简单,整车成本相对低廉,控制性能可以满足自行车要求。无刷直流电动机控制稍复杂,但因没有电刷而在寿命、安全方面优于有刷直流电机。电动自行车电机的驱动方式有:轮毂式驱动、中置式驱动和悬挂式驱动。市场上电动自行车以轮毂驱动为主,而轮毂驱动又以后轮驱动为好,前轮驱动性能相对较差。绝大多数电动自行车采用的是直流轮毂电机,它们为外转子式,这样定子可以固定在轴承上,非常适用于电动车的驱动。3.控制器
控制器是无刷直流电动机正常运行并实现各种调速伺服功能的指挥中心,它主要完成以下几个功能:
(1)对转子位置检测器输出的信号、PWM调制信号、刹车信号等进行逻辑综合,为驱动电路提
供各开关管的斩波信号和选通信号,实现电机的正反转和停车控制。
(2)产生PWM调制信号,使电机的电枢电压随给定速度信号而自动变化,实现电机开环调速。
(3)对电机进行速度闭环和电流闭环调节,使系统具有较好的动、静态性能。
(4)实现短路、过流、欠电压等故障保护功能。
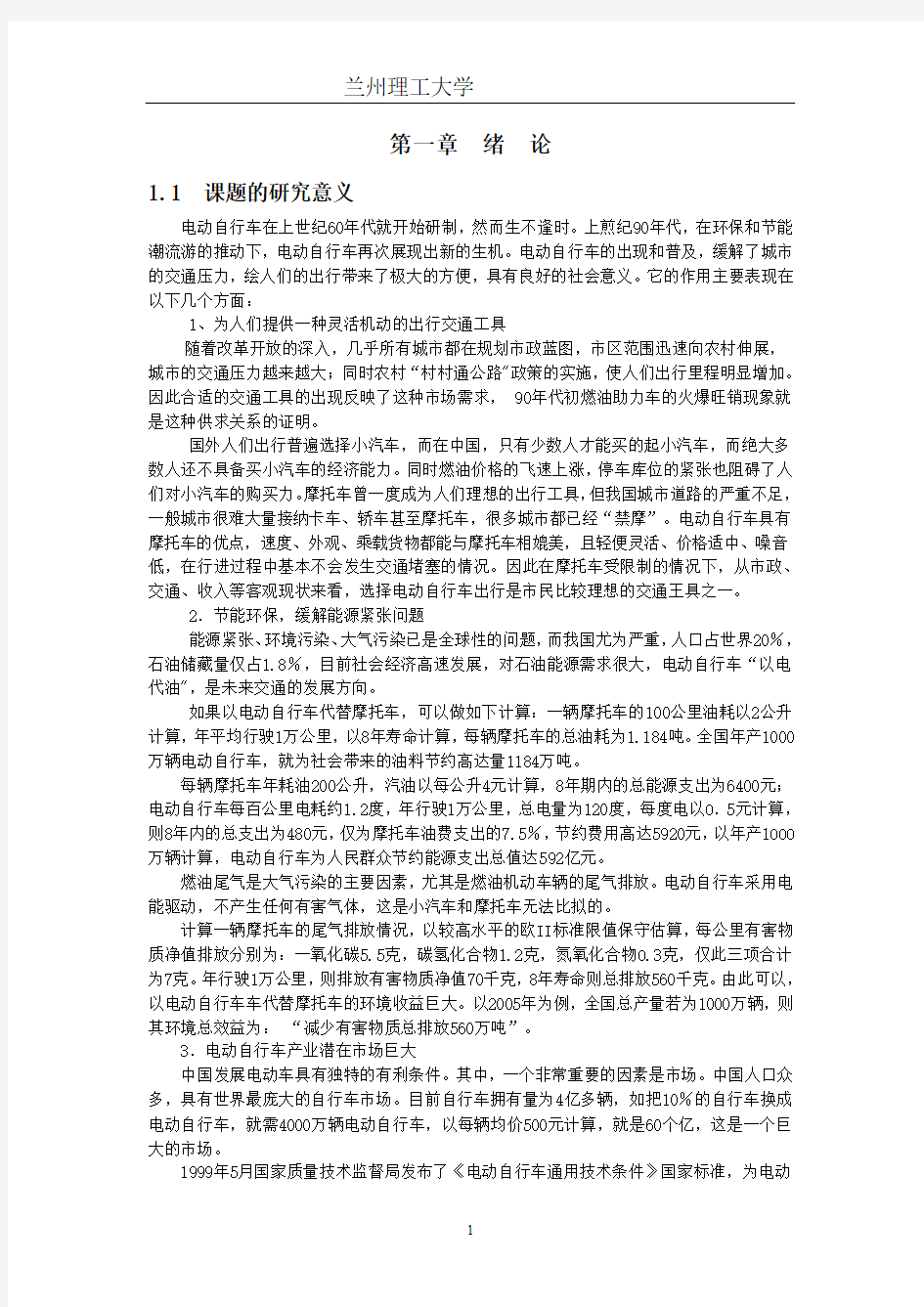
图1.1 电动自行车控制系统图
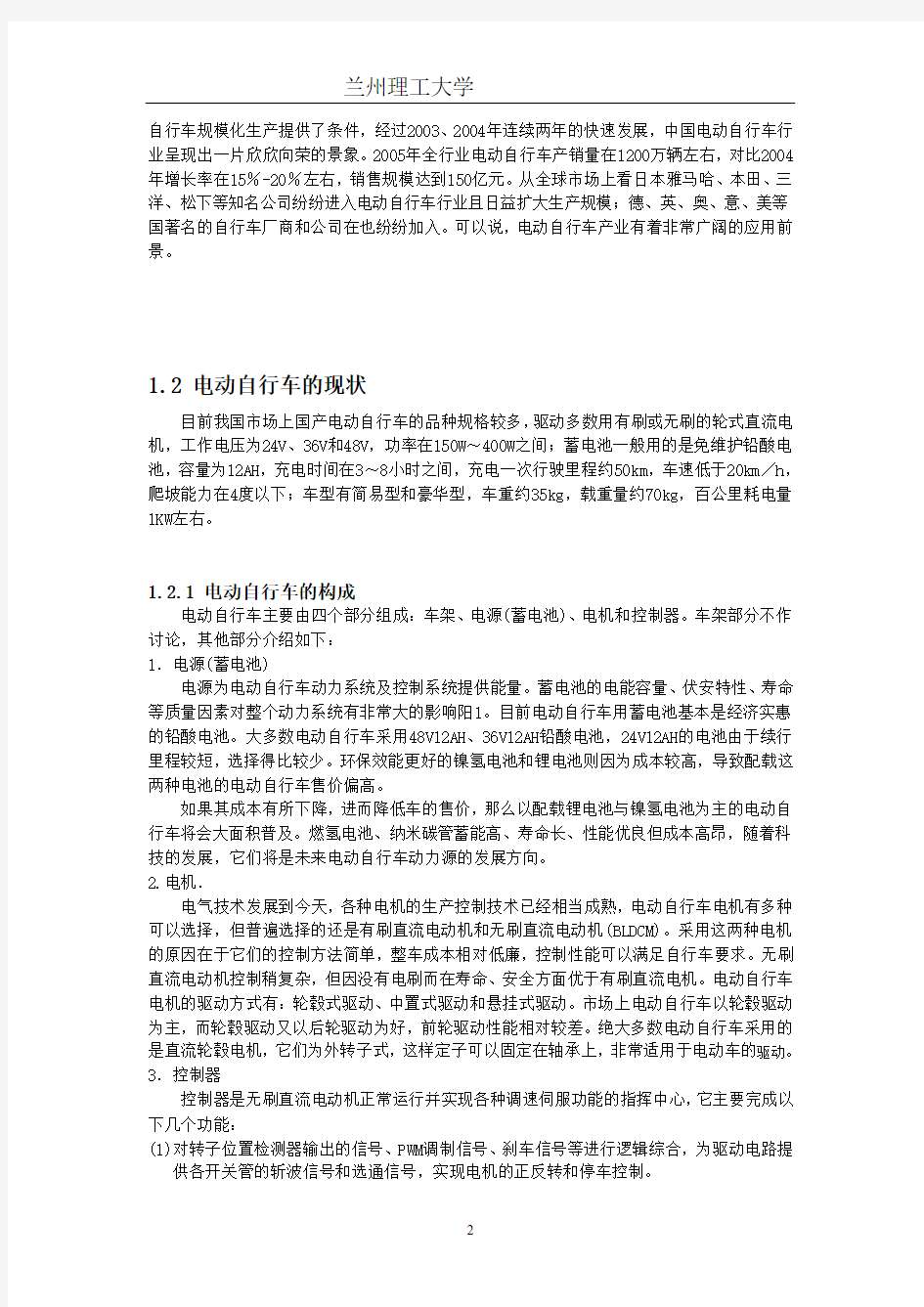
图1.1为电动自行车控制系统图,图1.2为电机控制器的详细框图,主要包括电源电路、控制电路、功率驱动电路以及检测反馈电路。电源电路将蓄电池的提供电压经过转换,为控制电路和功率驱动电路提供工作电压;控制电路接受外部信号,控制电机运行,同时实现控制算法;功率驱动电路将控制电路输出的控制信号进行功率放大,驱动电机运行;检测反馈电路采集电机运行的各种参数,供控制电路使用。
1.2.2 无刷直流电动机的发展现状
无刷直流电动机是在有刷直流电动机的基础上发展起来的,这一渊源关系从其名称“无刷直流’’中就可以看出。有刷直流电动机从19世纪40年代出现以来,以其优良的转矩控制特性,在相当长的一段时间内一直在运动控制领域占据主导地位。但是有机械接触的电刷一换向器结构一直是直流电机的一个致命弱点,它降低了系统的可靠性,限制了其在很多场合中的应用。为了取代有刷直流电机的机械换向装置,人们进行了长期的探索。早在1917年,Bolgior就提出了用整流管代替有刷直流电机的机械电刷,从而诞生了无刷直流电机的基本思想。1955年,美国的D.Harrison等首次申请了用晶体管换相线路代替有刷直流电机的机械电刷的专利,标志着现代无刷直流电机的诞生。
图1.2控制器框图
无刷直流电动机的发展在很大程度上取决于电力电子技术的进步。在无刷直流电动机发展的早期,由于当时大功率开关器件仅处于初级发展阶段,可靠性差,价格昂贵,加上永磁材料和驱动控制技术水平的制约,使得无刷直流电动机自发明以后的一个相当长的时期内,
性能都不理想,只能停留在实验室阶段,无法推广使用。1970年以来,随着电力半导体工业的飞速发展,许多新型的全控型半导体功率器件(如GTR、MOSFET、IGBT)相继问世,加之高磁能积永磁材料(SmCo、NdFeB等)陆续出现,这些均为无刷直流电机广泛使用奠定了坚实的基础,无刷直流电动机系统因而得到了迅速发展。在1978年汉诺威贸易博览会上,前联邦德国的MANNESMANN公司正式推出了MAC无刷直流电机及其驱动器,引起了世界各国的关注,随即在国际上掀起了研制和生产无刷直流电动机系统的热潮,这也标志着无刷直流电动机走向实用阶段。
随着人们对无刷直流电动机特性了解的日益深入,无刷直流电动机的理论也逐渐得到了完善。1986年H.R.Bolton对无刷直流电动机作了全面系统的总结,指出了无刷直流电动机的研究领域。
我国对无刷直流电动机的研究起步较晚。1987年,在北京举办的联邦德国金属加工设备博览会上,SIMENS和BOSCH两公司展出了永磁自同步伺服系统和驱动器,引起了国内有关学者的广泛注意,自此国内掀起了研制开发和技术引进的热潮。经过多年的努力,目前,国内已有无刷直流电动机的系列产品,形成了一定的生产规模。对于正弦波的永磁同步电动机系统,国内目前还没有系列产品生产厂家。
1.2.3 当前国内外无刷直流电动机的研究动态
近年来,随着高性能永磁材料、微电子技术、自动控制技术和电力电子技术的快速发展,无刷直流电动机得到了越来越广泛的应用,范围涉及国民经济的各个领域,譬如家用电器、电动汽车、航空航天等。
当前,无刷直流电动机的研究主要集中在以下几个方面:
(1)无机械式转子位置传感器控制。转子位置传感器是整个驱动系统中最为脆弱的部件,不仅增加了系统的成本和复杂性,而且降低了系统的可靠性和抗干扰能力,同时还需要占据一定的空间位置。在很多场合,例如空调器和计算机外设都要求无刷直流电机以无转子位置传感器方式运行。
无转子位置传感器运行实际上就是要求在不采用机械传感器的条件下,利用电机的电压和电流信息获得转子磁极的位置信息,目前比较成熟的无转子位置传感器运行控制方法有:·反电动势法一包括直接反电动势法、间接反电动势法以及派生出来的反电
动势积分法等。
·定子三次谐波检测法。
·续流二极管电流通路检测法。
但现有方法都存在各自的局限性,仍在不断完善中。
(2)转矩脉动控制。存在转矩脉动是无刷直流电机的固有缺点,特别是随着转速升高,换相导致转矩脉动加剧,并使平均转矩显著下降。减少转矩脉动是提高无刷直流电机性能的重要方面。
(3)智能控制。随着信息技术和控制理论的发展,在运动控制领域中,智能控制理论得到长足的发展和应用。目前,专家系统、模糊逻辑控制和神经网络控制是三个最主要的理论和方法。其中,模糊控制是把一些具有模糊性的成熟经验和规则有机的融入到传动控制策略中,现已成功地应用到许多方面。随着无刷直流电机应用范围的扩大,智能控制技术将受到更广泛的重视。
1.3 电动自行车控制器的研究现状及难点
电动自行车控制器的主要形式有:分立元件加少量集成电路构成的模拟控制系统、基于专用集成电路的控制系统、以微型计算机技术为核心的数模混合控制系统和全数字控制统。
模拟控制系统由于模拟电路中不可避免的存在参数漂移和参数不一致等问题,加上线路复杂、调试不便等因素,使电机的可靠性和性能受到影响,在电动自行车控制器中已经不采用了。
基于专用集成电路的控制系统采用无刷直流电动机专用集成电路如MC33033、MC33035、ML4428为控制核心,克服了分立元件带来的弊端,使控制电路体积小、可靠性高,但功能难以扩展,在早期的电动车控制器中较多采用。
数模混合控制系统和全数字控制系统采用数字电路、单片机以及数字信号处理器(DSP)构成硬件系统,控制规律由硬件实现转向软件实现。控制灵活、功能扩展方便且易实现较复杂的控制算法。目前的电动自行车控制器普遍采用这种控制系统。
当前,电动自行车控制器设计有待深入研究主要问题包括:
(1)转矩脉动问题。随着电动自行车的深入使用,人们对电动自行车的爬坡能力(即输出力矩)、启动噪声、骑行抖动等性能指标提出了更离要求。这些指标与无刷直流电动机的转矩脉动有直接关系,且无刷直流电动机与其他电动机相比,本身具有更大的转矩脉动。针对这一问题,人们从电动机本体和电动机控制系统两方面出发提出了多种转矩脉动控制方法。随着电动机设计技术和电动机控制技术的不断发展,这方面的研究还会不断深入的进行下去。
(2)调速方法。现在常用的控制方法是速度调节和电流调节均采用PI调节器的双闭环调速方法,因为其算法简单和可靠性高,尤其适用于可以建立精确数学模型的确定性控制系统,因此得到了广泛的应用。但由于电动自行车骑行路况的复杂性,不同的路况对电机电流和速度的调节有不同的要求,且需要控制器在各种参数不同的电机都能可靠运行,因此传统的PI 调节器还不能完全满足其控制要求。如何在这些情况下进行速度调节就要求研究和设计人员投入更多的精力。
(3)控制器设计。出于成本考虑,无刷直流电动机控制系统设计普遍采用单片机的数字控制。以MCU为核心的控制系统并不是一个纯硬件的控制电路,它还必须配合软件系统才能控制无刷直流电动机正常工作。这也为控制系统的设计带来更大的灵活性。软件设计就必然涉及到控制算法的研究和应用。因此,研究先进的控制算法就成为设计无刷直流电动机控制系统的一个重要方面。而由于单片机本身资源的有限,在DSP上能实现的复杂控制算法要在单片机上实现,还要进行精简。所以研究已经较成熟的复杂控制算法在单片机上的应用也是一个重要的方面。
(4)电磁干扰。电磁兼容在应用电子线路中已日益受到人们的重视。无刷直流电动机是一种电子电机,同样有抗干扰和防止对外界干扰的要求。无刷直流电动机控制器是强、弱电共存的电路,对于采用PWM高频调制脉冲的控制器,高的调制频率很容易对控制器其他线路产生干扰,因此必须认真处理其间的电磁干扰和电磁兼容问题。目前,对无刷直流电动机的电磁干扰问题进行研究,已越来越受到重视。
第二章电动自行车控制器的系统分析与设计
2.1 无刷直流电动机的基本结构与工作原理
2.1.1 基本结构
无刷直流电动机的基本结构原理如图2.l所示。
图2.1 无刷直流电动机结构原理图
它主要由电动机本体、位置传感器和电子开关线路三部分组成。电动机本体在结构上与永磁同步电动机相似,但是没有笼型绕组和其他启动装置。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2P=2,4?)组成。图2.1中的电动机本体为三相两极,三相定子绕组分别与电子开关线路中对应的功率开关器件联结,A相、B相、C相绕组分别与功率开关管Vl、V2、V3连接,位置传感器VPl、VP2、VP3跟踪转子与电机转轴相联结,用来检测电动机转子的位置,其输出端与电子开关线路中对应的功率开关器件连接。
当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场互相作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
因此,所谓无刷直流电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁同步电动机以及位置传感器三者组成的电动机系统。其基本原理框图如图2.2所示。
图2.2 基本原理框图
无刷直流电机的开关线路是用来控制电机定子上各相绕组通电的顺序和间,主要由功率逻辑开关单元和位置传感器信号处理单元两个部分组成。功率逻辑开关单元是控制电路的核心,其功能是将电源的功率以一定的逻辑关系分配给无刷直流电机定子上各绕组,以便使电动机产生持续不断的转矩。而各相绕组导通的顺序和时间主要取决于来自位置传感器的信号。
2.1.2 工作原理
图2.3为无刷直流电动机系统图,以此说明无刷直流电动机的工作原理。电机本体的电枢绕组为三相星形连接,位置传感器与电机本体同轴,控制电路对位置信号进行逻辑变换后产生驱动信号,驱动信号经驱动电路隔离放大后控制逆变器的功率开关管,使电机的各项绕组按一定的顺序工作。
图2.3无刷直流电动机系统
当转子转至图2.4(a)所示位置时,控制电路根据所获得的转子位置信息,使VTl、VT4导通,即A、B两相通电。电枢绕组在空间产生的磁动势为Fa,与定子磁场产生的磁动势Fr 相互作用,使电机的转子顺时针转动。当转子在空间转过60°电角度,到达图2.4(b)所示位置时,转子位置传感器输出的信号经控制电路逻辑变换后驱动逆变器,使VTl、VT6导通,A、C两相绕组通电,电枢绕组在空间产生的磁动势Fa如图2.4(b)所示,此时定转子磁场相互作用,使电机的转子继续顺时针转动。
转予在空间每转过60°电角度,逆变器开关就发生一次切换,其导通逻辑为VTl、VT4一VTl、VT6一VT3、VT6一VT3、VT2一VT5、VT2一VT5、VT4一VTl、VT4。在此过程中,转子始终受到顺时针方向的电磁转矩作用,沿顺时针方向连续旋转。
a)VT1、VT4导通,A、B相通电 b)VT1、VT6导通,A、C相通电
图2.4 无刷直流电动机的工作原理示意图
在图2.4(a)到图2.4(b)的60°电角度范围内,转子磁场沿顺时针连续旋转,而定子合成磁场在空间保持图2.4(a)中Fa 的位置静止;只有当转子磁场连续旋转60°电角度,到达图
2.4(b)所示的Fr 位置时,定子磁场才从图2.4(a)的Fa 位置跳跃到2.4(b)中的Fa 位置。可见定子合成磁场在空间不是连续旋转的,而是一种跳跃式旋转磁场。
转子在空间没转过60°电角度,定子绕组就进行一次换流,定子合成磁场的磁状态就发生一次跳跃。可见,电动机有六种磁状态,每一次有两相导通,每相绕组的导通时间对应于转子旋转120°电角度。无刷直流电机的这种工作方式称为两相星形六状态。
2.2 无刷直流电动机的转矩脉动
通常,转矩脉动可以定义为最大电磁转矩和最小电磁转矩之差与额定运行时的平均电磁转矩之间的比值,即
m a x m i n 100%N T T
T r T -=? (2.11)
式中,T 为转矩脉动;Tmax 为最大电磁转矩;Tmin 为最小电磁转矩;T N 为额定运行时的平均转矩。
2.2.1 转矩脉动的产生原因
理想的无刷直流电动机绕组反电动势是梯形波,不会有转矩脉动。但是电机本体或是控制系统的对理想情况的任何偏离都会产生转矩脉动。转矩波动分为以下几类:
(1)电磁因素引起的转矩脉动。电磁因素引起的转矩脉动是由于绕组电流和永磁场的相互作用而产生的转矩脉动。理想情况下,电枢采用集中绕组结构,电动势波形具有120°电角度的平顶,但实际往往做不到极弧系数为l ,且常常采用分布绕组,因此会产生转矩脉动,它与气隙磁通密度分布和绕组电流波形以及绕组形式有关。
(2)齿槽引起的转矩脉动。由于定子齿槽的存在,转子旋转时定子磁阻随转子旋转角度变化而变化,因而会产生转矩的脉动。
(3)电枢反应引起的转矩脉动。电枢反应改变了永磁体的方波气隙磁感应强度分布波形,使气隙磁场的前极尖部分被加强,后极尖部分被减弱。该畸变的磁场与通电绕组相互作用,电磁转矩随转、定子相对位置的变化而产生了转矩脉动。
(4)机械加工引起的转矩脉动。机械加工和材料的不一致也是引起转矩脉动的重要原因。工艺误差造成摩擦转矩不均匀,绕组各相电气参数不对称,各永磁极性能不一致等。
(5)电流换相引起的转矩脉动。由于换相时相绕组电流发生瞬变导致电动机的电磁功率瞬变,进而产生了换相转矩波动。换相转矩波动与相绕组旋转反电动势的波形、换相位置角、换相时刻的相电流初值以及相绕组阻抗参数等因素有关。
其中,换相转矩脉动是引起转矩波动的主要原因。
2.2.2 换相与转矩脉动
无刷直流电动机每经过一个磁状态,就需要进行一次换相,每一次换相都会对电磁转矩产生一定影响。下面以两相导通星形三相六状态为例,进行换相转矩脉动分析。
如图2.5无刷直流电动机等效电路所示,假定功率开关管从VTl 、VT6导通变为VT3、VT6导通,电路状态由A 、C 两相绕组导通切换到B 、C 两相绕组导通。换相时,VTl 关断,由于A 相电流不能突变,经VD2续流,形成A 相一C 相一VT6一VD2一A 相的续流回路。同时VT3,VT6导通,形成了电源一VT3一B 相一C 相一电源的回路。
1、换相过程中的相电流和转矩
为了简化分析,忽略电枢绕组的电阻,则换相过程中电路方程可变为
()0a c M a M c di di L e L e dt
dt -++= ()0b
c M b M c di di L e L e dt dt -++=
0i i i ++= (2.12)
又因为各绕组的反电动势为平顶宽大于等于120°电角度的梯形波,所以
a b c e e e E m
==-= (2.13)
由于i a +i b +i c =0 0a
b c d i d i
d i d t d t d t
++= (2.14) 把(2.13)和(2.14)代入(2.12),得
220220a b M
M m a b M M
m di di L L E dt
dt di di L L E dt dt ++=++= (2.15)
解上述方程组,并将结果代入(2.14),得换相过程个相电流的变化率为
)232(343a
s m M b
s m M c
s m M
d i U E d t
L d i U E d t L d i U E d t L +--=-=
= (2.16) 解上述微分方程组,各相电流的换相前的初始值和换相后的稳态值如图2.5所示,设换相开始时刻即积分起始时刻为0时刻,换相时间为t f,A 相绕组电流i a 降为O ,B 相绕组电流i b 从O 上升到稳态值I ,C 相为非换相绕组,换相前后的电流值均为I 。换相期间,各相电流的瞬时值
为
图2.5 换相期间三相电流示意图
2.电机转速对换相的影响
根据不同转速,换相存在三种情况,如图2.6所示。
图2.6 三种换相情形
3.换相对转矩的影响
在换相过程中,电磁转矩为
1
1
()()e a a b b c c m a m b m c T e i e i e i E i E i E i w w =++=+- (2.24)
由基尔霍夫电流定理,知a 、b 、c 电流和为0,所以
224()3m
m
s m
e c M E E U E T i I t w w L -=-=+ (2.25)
可见,换相期间的电磁转矩与非换相绕组的电流成正比。
非换相时的电磁转矩由两相绕组的合成磁动势与转子永磁磁动势相互作用产生,其计算公式为:
2m
e E T I w (2.26)
2.2.3 换相转矩脉动的抑制方法
抑制换相引起的转矩脉动的方法有:电流反馈法、滞环电流法、重叠换相法、PWM 斩波法等。
1. 电流反馈法
非换相相电流的存在导致换相转矩脉动,很多文献通过各种方法致力于使非换相相电流保持恒定,从而使转矩脉动为零。
一般来说,电流反馈控制可以分为两种形式:一种是直流侧电流反馈控制,另一种是交流侧电流反馈控制。直流侧电流反馈控制的电流反馈信号由直流侧取出,主要控制电流幅值。由于直流侧电流反馈控制是根据流过直流电源的电流信号进行的,因此只需要一个电流传感器便可得到电流反馈信号。交流侧电流反馈控制的电流反馈信号由交流侧取出,此时,根据转子的位置来确定要控制的相电流,使其跟随给定。在换相过程中,当非换相电流未到达给定值时,PWM 控制不起作用;当非换相电流超过设定值时,PWM 控制开始起作用,关断所有开关器件,使电流值下降,直至低于设定值再使被关断的开关器件导通,使其值上升,以此往复,即可实现非换相相电流的调节,直至换相完成。
2.滞环电流法
其基本原理是:在电流环中采用HCR(Hysteresis Current Regulatof 滞环电流调节器),通过比较参考电流和实际电流,使得换相时能够给出适合的触发信号。实际电流的幅值和滞环宽度的大小决定了HCR 控制信号的输出。当实际电流小于滞环宽度的下限时,MOSFET 器件导通;随着电流的上升,达到滞环宽度的上限时,MOSFET 器件关断,使电流下降。滞环电流法的特点是:应用简单,快速性好,具有限流能力。
3.重叠换相法
电流反馈法、滞环电流法虽然解决了低速换相的转矩脉动问题,但通常在高速时效果不理想。现今,在高速段抑制换相转矩脉动较成熟的方法是重叠换相法。其基本原理是:换相时,本应立即关断的功率开关器件并不是立即关断,两是延长了一个时间间隔,并将本不应开通的开关器件提前导通。传统的重叠换相法中,重叠时闻需预先确定,但选取合适的重叠时间较为困难,且不能从最大程度上减小转矩脉动。
重叠换相法分为超前导通和延时导通,超前导通即提前导通下一只该导通的开关管,使原来处于弱磁区域的绕组电流转移一部分到处于磁密较高的下一相绕组中,该电流将产生补偿转矩,以减小转矩波动;延时导通即在该关断绕组时而不关断绕组,使其延时通电,同样可以产生补偿转矩,抑制电流换相过程引起的电磁转矩波动。本系统采用的是后一种方法一延时导通重叠换相法。采用重叠换相时的转矩脉动都要小于普通换相的转矩脉动。转矩脉动的抑制程度与换相时间、PWM 占空比以及电机转速有关,选择合适的换相时间长度和PWM 占空比能使转矩脉动降到最低。
4.PWM 斩波法
PWM 斩波法与交流侧电流反馈控制方法较类似,即开关器件在断开前、导通后进行一定频率的斩波,控制换相过程中绕组端电压,使得各换相电流上升和下降的速率相等,补偿总电流幅值的变化,抑制换相转矩脉动。与重叠换相法相比,该方法具有更小的转矩脉动,适合于精度要求更高的场合。
2.3无刷直流电动机的能量回馈制动
电动自行车的电源一般都是铅酸电池,功率密度小、能量有限,且电动自行车需要频繁起动、刹车、限速,采用能量回馈制动方式能提高车辆的运行能量和效率,延长工作时间,增加续航里程。它无须改动任何硬件就能使电机从电动运行状态切换到能量回馈制动状态,且使制动及能量回收的综合效果达到最佳。
2.3.1 能量回馈制动原理
无刷直流电动机除了作为电动机输出动力外,还可以作为发电机输出电能,其工作方式分为电动方式和发电方式。
低速能量回馈制动是在电动机转速低于额定转速时实现电磁制动,同时向电源回馈能量,这种控制方式制动效果较好,能量回馈效率高,控制方便、安全,是一种较好的电气制动方式。
在低速能量回馈制动时,只对相同半桥上3只开关器件,如下半桥VT2、VT4、VT6进行PWM 控制;而另半桥上3只开关器件,如上半桥VTl、VT3、VT5总保持截止。以对下半桥进行PWM 调制为例,如图2.7所示。当某相反电动势为正向最大的120°电角度的区间内,对该相的下桥臂开关元件进行PWM控制,则可以产生可调的制动电磁转矩。
图2.7 回馈制动PWM调制方式
2.3.2 能量回馈制动控制规律
能量回馈制动电路是一个升压斩波电路。由升压斩波器原理可知,充电电流的大小与反电动势的大小及VT2触发脉冲的占空比有关,反电动势越大,则充电电流越太;占空比越大,则充电电流也越大。因此,在反电动势一定的条件下,调节功率开关的占空比,就能控制充电电流的大小,进而控制制动转矩的大小。
无刷直流电动机电动状态时,120°电机的两两导通的规律为VTl、VT6一VT3、VT6一VT3、VT2一VT5、VT2一VT5、VT4一VTl、VT4,对应电动状态的每一个状态,回馈制动的控制规律为:VT6一VT6一VT2一VT2一VT4一VT4。
2.4 电动自行车控制器的功能
本文设计的控制器蓄电池电压为48V,手把输出电压为OV~4V,正常运行时的最大电流
值为15A;当出现异常情况,导致电流急剧上升,电流值超过25A时,进入过流保护关闭驱动。功能包括调速、巡航、柔性电子刹车(EABS)、堵转保护、限流、过流保护、欠压保护、防飞车、软启动和60°和120°电机智能适应。
1.调速功能
当限速线未接时,手把从(1.25V~3.8V)转动时,PWM的输出范围3%到95%。当接上限速线时,手把从(1.25V~3.8V)转动时,PwM输出范围3%到75%,速度最高达20km/h。
以下情况会造成调速功能失效:
(1)进入巡航;
(2)有刹车信号;
(3)故障时,故障指示灯闪烁;
(4)蓄电池欠压时。
2.巡航功能
巡航功能是为了避免骑行者的手腕疲劳而设置的,进入巡航后,可以松开手把,电动自行车仍以手把松开前的速度继续前行。
巡航功能分为自动巡航和手动巡航,巡航功能也可以通过把短路子接上就取消该功能,不短接就保留该功能。
自动巡航功能进入条件:转把电压必须高于2V,并保持当前电压值(0.1V抖动)至少8秒时间。
自动巡航退出条件:
(1)刹车信号;
(2)转把二次归零;
(3)发生堵转;
(4)电池欠压保护。
手动巡航进入条件:按巡航键则开始巡航;退出条件同自动巡航。
3.柔性电子刹车(EABS)功能
此功能借鉴于汽车的ABS功能,为了防止在高速骑行时突然刹车,轮胎打滑,或者由于惯性把人摔落车下,而造成的安全事故。它利用电机回馈制动的原理,使电机停下来,而非利用刹车片的摩擦作用,因此有利于保护刹车片,在高速时和下坡时可以向电池充电,增加电池的续航里程。
4.堵转保护功能
当轮子发生堵转(即使把有发生转动,但是电机未发生转动的情况),电机绕组中的电流很大,持续时间过长,会使电机绕组过热烧断,损坏电机,同时也会使电池长时间大电流放电,损坏电池,必须及时加以断电保护。处理过程如下:
前2秒:PWM以最大占空比输出驱动电机,这是为了防止启动和遇到小障碍物时误进入堵转状态,影响正常骑行。
第3秒:检测,若位置还未发生变化将PWM输出停止,电机停转保护,此时手把失效。
堵转状态的取消:(1)有刹车信号;(2)轮子转动一个相位角;(3)重新开机。
5.限流动能
电机中的电流不能无限制增加,所以在保持最大转矩的条件下,限制最大输入电流为15A 6.过流保护功能
在正常行驶中若检测到大于25A的电流值立即关闭PWM输出,电机停转保护,转把失效。
7. 欠压保护功能
当电池毫压低于42V(左右偏差O.5V),并保持1秒后,欠压功能开启,自动关闭电机,等到转把归零后,再次检测电池电压,只有电池电压回升到44V以上才能再次驱动电机。欠
压保护是为了保护电池过度放电,影响其使用寿命,使用回差保护,避免电机在欠压点来回启停。
8.防飞车功能
当手把损坏时,手把电压输出一直保持在1.25V 以上,接通电源,电机就会开始运转,向前飞出去,导致人身事故,同时也是防止某种误操作。
9.软启动
电机启动时,会产生很大的冲击电流,这样对电机和电池损害很大,软启动就是为了抑制启动时的冲击电流,使电流缓慢上升,短时间内达到稳定状态。
10.60°和120°电机智能适应
电动自行车用电机根据其位置传感器安装角度的不同分为两种:60°电机和120°电机,这两种电机输出的位置信号不一样,不能使用同样的换相时序,通常控制器也根据电机不同也分为两种,此功能就是兼容两种角度的电机,不需要改动任何硬件。
第三章 电动自行车控制器的控制策略
调速是电动自行车的重要功能之一,整个系统的设计都以调速为中心。无刷直流电动机的调速控制特性如下
a O a a e d I U I R L
d t n K ???-+????= (3.1)
式中,U O 为电枢电压(V );I a 为电枢电流(A );Ra 为电枢电阻;Ke 为电动势系数,Ke=Ea/n. 由(3.1)式可知,无刷直流电动机的调速方法分为两种:对励磁进行控制的励磁控制方法和对电枢电压(Uo)进行控制的电枢电压控制方法。
励磁控制法是在电动机的电枢电压保持不变时,通过调整励磁电流来改变励磁磁通,从而实现调速。这种调速方法,调速范围小,在低速时受磁极饱和的限制,并且励磁线圈电感较大,动态响应较差,所以这种控制方法用的很少。电枢电压控制法是在保持励磁磁通不变的情况下,通过调整电枢电压实现调速。电枢电压控制法在调速时,保持电枢电流不变,即保持电动机的输出转矩不变,可以得到具有恒转矩特性的大的调速范围,因此大多数应用场合都使用电枢电压控制法。
电枢电压的控制方式有很多种,从早期的继电器控制到晶闸管控制,到目前的PWM 调制,其控制方法的更新与新型开关器件的出现是分不开的。本系统采用PWM 调制方法控制电枢电压,即通过调节逆变电路功率器件PWM 脉冲驱动信号的占空比来改变电动机绕组两端的平均电压,从而实现无刷直流电动机的调速。
3.1 PWM 脉宽调速原理
PWM (Pulse Width Mulation)脉宽调速,是指通过改变开关器件的通断时间,来改变电枢两端的平均电压,调节电机转速的方式。其原理图如图3.1所示。
图3.l(a)是PWM 调制调速系统原理示意图。开关S 表示脉宽调制器,调速系统的外加电源
电压Us 为固定的直流电压,当开关S 闭合时,直流电源经过S 给电动机M 供电;开关S 断开时,直流电源供给M 的电流被切断,并通过二极管续流,电枢两端电压接近为零。改变控制脉冲宽度,从而改变电机绕组输入端平均电压,达到调速目的。脉冲波形见图3.l(b),其平均电压为
图3.1 PWM 调制原理图 01
o n d s t s s t U U d U D U T T ∞
===? (3.2)
式中,T 为脉冲时钟周期;t on 为导通时间;D 为PWM 占空比(0≤D ≤1)。
可见,在电源Us 和PWM 波周期T 固定的条件下,Ud 可随D 的改变而平滑调节,从而实现电动机的平滑调速。
3.2 PWM 调制方式
对于两相导通三相六状态无刷直流电动机,一个周期内,每个功率开关器件导通120°电角度,每隔60°电角度有两个开关器件切换,PWM 调制方式有五种: on-pwm 、pwm-on 、H_pwm-L_0n 、H_on-L_pwm 、H_pwm-L_pwm 。
PWM 调制方式通常分为双斩和单斩两大类型。双斩方式功率管的开关损耗是单斩方式的2倍,降低了控制器的效率。另外,在相同的平均电磁转矩下,单斩方式比双斩方式的稳态转矩脉动小,在相同的PWM 占空比及相同的母线电压下,单斩方式的绕组电流稳态值要大于双斩方式的绕组电流稳态值。因此采用单斩方式进行PWM 调制控制的BLDCM 得到了更为广泛应用。单斩方式又可以分为两大类:一类是6个导通状态始终只对上桥臂或下桥臂的功率管进行PWM 调制;另一类是6个功率管轮换进行PWM 调制,每个导通状态对应一个功率管斩波,该方式下又可以分为H_pwm-L_on 、H_on-L_pwm 、on-pwm 和pwm-on 四种PWM 调制方式。
换相转矩脉动与PWM 调制方式有关。本系统从实际出发,采用H_pwm-L_on 调制方式,系统的控制对象为反电动势为梯形波、平顶宽度为120°电角度无刷直流电动机,采用120°导通方式,每一个周期由6个扇区组成,每扇区占60°电角度,每个开关元件导通120°,每一扇区有两个MOSFET 同时导通,在此期间,下半桥管恒开通,对应的上半桥管按输出电流和速度进行PWM 调制,通过调节PWM 的占空比调节相电流和转速。
3.3 数字PID 控制
3.3.1 PID 控制介绍
PID 控制是最早发展起来的控制策略之一,旱在20世纪30年代末期就已经出现,50多年来不断更新换代,由于其算法简单、可靠性高,被广泛应用于工业过程控制,尤其是在可建立精确数学模型的确定控制系统应用很多。按偏差的比例、积分和微分线性组合进行控制的方式,就是著名的PID 控制。
简单说来,PID 控制器各校正环节的作用如下:
比例环节:即时成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制器立即产生控制作用,以减少偏差。
积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数T I ,T I 越大,积分作用越弱,反之则越强。
微分环节:反映偏差信号的变化趋势(变化速率),并在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。 PID 控制器各环节既有优点又有各自不足的地方:
比例控制的优点是误差一旦产生,控制器立即就有控制作用,使被控制量朝着减少误差的方向变化,控制作用的强弱取决于比例系数K P 。缺点在于对于具有平衡性(即系统阶跃响应终值为一有限值)的被控对象存在静差。加大K P 可减少静差,但K P 过大时,会导致动态性能变坏,甚至会使闭环系统不稳定。
积分控制的优点是:它对误差进行记忆并积分,有利于消除静差。但它的不足之处在于积分作用具有滞后性,积分作用太强会使控制的动态性能变差,以至于使系统不稳定。 微分控制的优点在于它能对误差进行微分,对误差的变化趋势敏感,增大微分控制作用可加快系统响应,使超调量减少,增加系统稳定性。它的缺点是对于干扰同样敏感,使系统抑制干扰能力降低。
3.3.2 数字PID 控制算法
PID 控制的控制规律为
011
()t p D o d e u K e e d t T u T d t =+++? (3.3)
式中,K P 为比例常数;T I 为积分常数;T D 为积分常数。
在数字控制中,由于计算机控制是一种采样控制,它只能根据采样时刻的偏差量计算控制量,因此需要对其进行离散化处理,可得离散的增量式PID 控制算法为
22
111D k p k k k p k k D k T
T u K e e e K e K e K e T T ?=?++?=?++?(3.4) 式中,△u k 为第k 个采样时刻的控制量与第k-1个采样时刻的控制量之差;e k 为第k 个采样时刻的偏差;△e k 为第k 个采样时刻的偏差与第k-1个采样时刻的系统偏差之差。
3.4 双闭环调速系统设计
速度电流双闭环控制的调速系统是最典型的调速系统,其原理结构图如图3.3所示。 电动机的速度和电流分别由两个独立的调节器分别控制,速度调节器的输出就是电流调节器的给定,因此电流环能够随转速的偏差调节电动机电枢的电流。起动时,让转速外环饱和不起作用,电流内环起主要作用,调节启动电流保持最大值,使转速线性变化,迅速达到
图:3.2 双闭环调速模型
给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。当转速低于给定转速时,速度调节器的积分作用使输出增加,即电流给定上升,并通过电流环调节使电动机电流增加,从而使电动机获得加速转矩,电动机转速上升。当实际转速高于给定转速对,转速调节器的输 出减小即电流给定减小,并通过电流环调节使电动机电流下降,电动机将因为电磁转矩减小而减速。当转速调节器饱和输出达到限幅值时,电流环即以最大电流实现电动机的加速,使电动机的起动时间最短,在可逆调速系统中实现电动机的快速制动。
转速调节器的作用:①使转速n 跟随给定电压变化,稳态无静差;②对负载变化起抗扰作用;③其输出限幅值决定允许的最大电流。
电流调节器的作用:①电动机起动时,保证获得最大电流,起动时间短,使系统具有较好的动态特性:②在转速调节过程中,使电流跟随其给定电压U 变化;③当电动机过载时,限制电枢电流的最大值,起到安全保护作用,故障消失后,系统能够自动恢复正常。
3.4.1 电流环的设计
如图3.3所示,电流环由电流调节器(ACR),PWM 同步控制器和直流母线电流检测组成,采用典型I 型系统来校正。由于无刷直流电机具有较好的动态性能,电流调节器一般只需要PI 调节,控制算法为
11()K K p errk errk I errk D D K i i K Ti --=+-+ (3.5) 式中,Dk 、i errk 分别为第k 个采样时刻的占空比、电流误差;D k-1,i errk 分别为第 K-1个采样时刻的占空比、电流误差;T 为采样周期;K p 为比例系数:K I 为积分系数。
3.4.2 速度环的设计
速度环由速度调节器、转子位置传感器 、转速计算以及电流环组成,作用是增强系统的抗干扰能力,抑制转速波动,它是系统的主要控制环节。反馈速度不能直接得到,只能通过转子位置传感器输出的脉冲信号采用数字式测速得到。
1.测速原理
数字式测速方法有M 法测速、T 法测速和M /T 法测速。
M 法测速是在规定的时间T c 内,对位置脉冲信号的个数m 1进行计数,从而得到转速的测量值。其转速可由下式计算
160()m in N c
m r n p T = (3.5) 式中,P N 为每转的位置信号脉冲个数。由式(3.5)可知,M 法适用于高速运行时的测速,低速时测量精度较低。因为在P N 和T c 相同的条件下,高转速时m 1较大,量化误差较小。
T 法测速是测出相邻两个转子位置脉冲信号的间隔时间来计算转速的一种测速方法,而时间的测量是借助单片机计数器对已知频率的时钟脉冲计数实现的。
设时钟频率为f,两个位置脉冲间的时钟脉冲个数为m 2,电机转子旋转一周,转子位置脉冲信号含有的脉冲个数为P N ,则电机的转速为
260()m in N f
r n p m = (3.6)
由式(3.6)可知,T 法测得的转速与时钟脉冲计数值成反比,转速越高,测得的计数值越小,估算误差越大,因此T 法测速较适合于低速场合。
M /T 法测速综合了以上两种方法的优点,既可以在低速段可靠的测速,又在高速段具备较高的分辨能力,因此在较宽的范围内均有很好的检测准确度,M /T 法测速是在稍大于规定时间T c 的某一时间T d 内,分别对位置信号的脉冲个数m l 和高频时钟脉冲个数m 2进行计数。其计算公式为
1260()m in N m f
r n p m = (3.7)
本文电动自行车电机的转速最高不超过600r /min ,因此选择T 法测速。具体做法为:以转子位置信号的跳变沿为基准,使计数器记下转子转过一步的时间△t ,设电机极对数为p ,则电机的转速为
10
()m in r n p t =? (3.8)
2.模糊一PI 复合控制速度环设计
为了提高系统的动、静态性能,本系统中速度调节器采用模糊一PI 复合控制,在启动或者负载发生突然变化,偏差在大范围内时采用模糊控制,利用模糊控制响应快和调节平稳的特性,使速度跟踪加快;当电机进入平稳状态,偏差在小范围偏差内转换到PI 控制,PI 控制积分环节能提高系统的静态精确度,以克服模糊控制容易产生静态误差的缺陷。二者的转换根据单片机程序给定的偏差范围进行自动切换。
第四章电动自行车控制器硬件设计
4.1 硬件系统框图
如图4.1所示,电动自行车控制器系统主要由以下部分组成;逆变电路、功率驱动保护电路、电源电路、单片机及其外围控制电路。
逆变电路及其驱动电路是单片机和电机之间的联系枢纽,其传输性能的好坏直接影响着整个系统的运行质量。其功能是将电源的功率以一定逻辑关系分配给无刷直流电动机定子上各相绕组。本系统采用三相全桥逆变电路。
功率驱动保护电路为单片机和逆变器之间的桥梁,单片机的输出信号,经过功率放大后,开通、关断M0SFET,同时防止逆变器端的电压反串到单片机端,损坏单片机的I/O口。
电源电路提供功率驱动及保护电路、单片机控制电路所需的电源。
单片机为控制核心,根据输入的信号运行控制算法控制电机的运行。
外围控制电路包括刹车信号、巡航电路等。
4.1 控制器系统框图
4.2 AVR系列ATmega48单片机简介
ATMEL公司于2002年推出了一款新型AVR高档单片桃,在AVR家族中,ATmega48是一个非常特殊的单片机,它的芯片内部集成了较大容量的存储器和丰富强大的硬件接口电路,具有AVR高档单片机MEGA系列的全部性能和特点,但由于采用了小引脚封装(为DIP28和TQEP/MLF32),所以其价格仅与低档单片机相当,成为具有极高性价比、深受广大用户喜爱的单片机,被广泛应用于电器、仪表、电源等行业。
ATmega48是一款基于AVR RISC、低功耗CMOS的8位单片机,由于在一个时钟周期内执行一条指令,ATmega48可以达到接近1MIPS/MHz。ATmega48具有以下特点:4K字节的在线编程/应用编程(ISP/IAP)Flash程序存储器,256字节EEPROM,512字节SRAM,32个通用工作寄存器,23个通用I/O口,3个带有比较模式灵活的定时器/计数器,6路PWM,1 8+2个内外中断源,1个可编程的UART接口,1个8位I*I*C总线接口,8(6)通道的l O位ADC,可编程的看门
狗定时器1个,SPI接口和5种可通过软件选择的节电模式。当单片机处于空闲模式时,CPU 将停止运行,而SRAM、定时器/计数器、SPI口和中断系统则继续工作;处于掉电模式时,振荡器停止工作,所有其他功能都被禁止,但寄存器内容得到保留,只有在外部中断或硬件复位时才退出此状态;处于省电模式时,芯片的所有功能被禁止(处于休眠),只有异步时钟正常工作,以维持时间基准。当单片机处于ADC噪声抑制模式时,CPU和其他的I/O模块都停止运行,只有ADC和异步时钟正常工作,以减少ADC转换过程中的开关噪声:在待命模式时,CPU和其他的I/O模块都停止运行,但系统振荡器仍在运行,使得系统在低功耗时可以很快地启动。
ATmega48单片机采用ATMEL的高密度非易失性内存技术,片内Flash可以通过SPI接口、通用编程器及自引导BOOT程序进行编程和自编程。利用自引导BooT程序,可以使用任一硬件接口下载应用程序,并写入到Flash的应用程序区中。在更新Flash的应用程序区数据时,处在Flash的BOOT区中的自引导程序继续执行,实现了同时读写的功能。由于将增强RISC 8位CPU与在系统编程和在应用编程的Flash存储器集成在一个芯片内,ATmega48成为一个功能强大的单片机,为许多嵌入式控制应用提供了灵活而低成本的解决方案。
图4.2为本系统中ATmega48的引脚分配图,PC6为复位脚,连接外部复位电路,PD0~PD2为霍尔位置检测电路的输入口,作为相绕组的换相信号,PBl~PB3\PD3\PD5~PD6为电机的驱动控制信号,其中PB2\PD5\PD6为上桥驱动控制信号,输出为PWM信号,PD3\PB3\PBl 为下桥驱动控制信号,正常换相时,输出为普通高低电平,柔性电子刹车时,输出为PWM信号。PCO~PC2为ADC的三个输入通道,分别连接电源电压检测输入、手把电压检测输入和电流检测输入,用于监测电源电压、手把电压和相电流,为欠压保护、过流保护以及双闭环调速提高数据。PB0\PC3~PC4\PD4\PDO为手动巡航按键输入口、巡航使能口、LED驱动口、刹车信号输入口和过流检测口,是系统的开关输入输出量,SCK\MISO\MOSI为调试口,用于在线调试和下载程序。
图4.2 ATmega48的引脚分配
4.3 电源电路
电源电路通过两级电压变换,得到控制电路所需的两组电压:+15V和+5V。+15V作为功率驱动电路的电源,+5V作为单片机及其他控制电路的电源。
纯电动汽车整车控制器的设计
纯电动汽车整车控制器的设计 摘要:随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。传 统的内燃机汽车消耗石油,排出大量废气,使得城市的空气质量不断下降。纯电 动汽车由于不使用传统化石能源,对环境不造成污染,受到人们的青睐。随着科 技的进步,电动汽车的核心技术不断地革新与突破,逐渐完善的城市基础设施提 供了有利的帮助,电动汽车已经成为潜力股,逐步取代传统汽车变为可能。本文 从汽车结构出发,结合整车信息传输过程,设计了整车控制器的软硬件结构。 关键词:纯电动汽车;整车控制器;硬件设计;软件设计 纯电动汽车作为新能源汽车的一种,以其清洁无污染、驱动能源多样化、能 量效率高等优点成为现代汽车的发展趋势。整车控制器(vehicle control unit,VCU)作为纯电动汽车整车控制系统的中心枢纽,主要实现数据采集和处理、控 制信息传递、整车能量管理、上下电控制、车辆部件控制和错误诊断及处理、车 辆安全监控等功能。国外在纯电动汽车整车控制器的产品开发中,积极推行整车 控制系统架构的标准化和统一化,汽车零部件厂商提供硬件电路和底层驱动软件,整车厂只需要开发核心应用软件,有利的推动了整车行业的快速发展。虽然国内 各大汽车厂商基本掌握了整车控制器的设计方案,开发技术进步明显,但是对核 心电子元器件、开发环境的严重依赖,所以导致了整车控制器的国产化水平较低。本文以复合电源纯电动汽车作为研究对象,针对电动汽车应有的结构和特性,对 整车控制器的设计和开发展开研究。 一、整车控制系统分析与设计 (一)整车控制系统分析 复合电源纯电动汽车整车控制系统主要由整车控制器、能量管理系统、整车 通信网络以及车载信息显示系统等组成。首先纯电动汽车整车控制器通过采集启动、踏板等传感器信号以及与电机控制器、能量管理系统等进行实时的信息交互,获取整车的实时数据,然后整车控制器通过所有当前数据对驾驶员意图和车辆行 驶状态进行判断,从而进入不同的工况与运行模式,对电机控制系统或制动系统 发出操控命令,并接受各子控制器做出的反馈。 保障纯电动汽车安全可靠运行,并对各个子控制器进行控制管理的整车控制器,属于纯电动汽车整车控制系统的核心设备。整车控制器实时地接收传感器传 输的数据和驾驶操作指令,依照给定的控制策略做出工况与模式的判断,实现实 时监控车辆运行状态及参数或者控制车辆的上下电,以整车控制器为中心通信节 点的整车通信网络,实现了数据快速、可靠的传递。 (二)整车控制系统设计 复合电源的结构设计,选择了超级电容与DC/DC串联的结构,双向DC/DC跟 踪动力电池电压来调整超级电容电压,使两者电压相匹配。为了车辆驾驶运行安全,同时为了更好地使超级电容吸收纯电动汽车的再生制动能量,在复合电源系 统中动力电池与一组由IGBT组成双向可控开关,防止了纯电动汽车处于再生制动状态时,动力电池继续供电,降低再生制动能量的吸收效率。 整车CAN通信网络设计,由整车控制器(VCU)、电机控制器(motor control unit,MCU)、电池管理系统(battery management system,BMS)、双向DC/DC控制器以及汽车组合仪表等控制单元(Electronic Control Unit,ECU)组成 了复合电源纯电动汽车的整车通信网络。 二、整车控制器硬件设计及软件设计
跷跷板
《跷跷板》教学设计 ——三年级下册第一单元 一、教材分析: 本课以跷跷板为探究的切入点,研究杠杆的平衡原理及天平的结构特点。但是,在本单元以“力”为探究主题的构建模式指导下,玩跷跷板、保持杠杆平衡也用到重力、压力等。另外,本单元各课例均有“游戏”的成份,跷跷板是学生生活中经常玩的一种玩具,让孩子们在玩中发现,探究有关平衡的科学规律,激发科学探究的兴趣。 二、教学目标: 1、能用观察、体验和已有知识经验对杠杆尺平衡作出假设***解释;能通过观察、实验等方式认识杠杆尺的平衡规律。 2、善于在游戏中发现、提出问题;关心人们运用杠杆平衡的技术成果;愿意合作与交流;乐于用学到的知识改善生活。 3、知道杠杆尺的平衡条件;了解生活中的平衡现象; 三、学情分析: 三年级学生学习科学课的热情很高,爱观察,爱实验,爱游戏,但由于年龄特点,他们还不能对身边的事物、游戏等产生科学的认识,因此有待于教师进一步引导,引领他们去发现游戏中的科学,进行有趣的科学探究活动。 四、教学重难点: 教学重点:能通过观察、实验等方式认识杠杆尺的平衡规律。 教学难点:杠杆尺的平衡条件
五、教学准备: 1、学生课前玩一玩跷跷板 2、教师准备:支架、杠杆尺、直尺、钩码、蜡烛、实验记录表、制作多媒体课件等。 六、教学过程: (一)回忆游戏提出问题 1、师生谈话:同学们玩过跷跷板吗?(玩过)在玩跷跷板时,有什么发现或问题?(师板书:跷跷板) 2、学生充分汇报交流发现,提出问题。(发现:跷跷板一边高,一边低;重的一边把轻的一边压起来了;有时轻的也能把重的翘起来;有时两边一样高,是平的…… 问题:为什么小同学能把大同学跷起来?为什么不同体重的人能使跷跷板平衡?在什么情况下,跷跷板才能平衡?……) (二)猜想假设尝试解释 1、谈话:同学们发现了许多有趣的现象,也提出了一些有价值的问题,总之大家都想知道跷跷板保持平衡的秘密。我们猜一猜,到底是怎么回事? 2、生猜测:可能与两边的重量有关,重的一边往下落,轻的一边会往上升。 还可能与位置有关…… (三)合作探究表达交流, 1、师介绍杠杆尺,请大家用杠杆尺证明自己的猜测:怎样才能使杠
电动车跷跷板设计
电动车跷跷板设计报告 山东交通学院禹海岱刘晓君董立国 摘要:为了满足电动车跷跷板的设计要求,进行了各单元电路方案的比较论证及确定,系统以凌阳16位单片机SPCE061A作为电动车的控制核心,选用了上海直川科技有限公司生产的ZCT245AL-TTL型倾角传感器测量跷跷板水平方向倾角,该传感器灵敏度高、重复性好且输出485信号便于与单片机接口;对于关键的小车动力部分,经过充分比较、论证,最终选用了控制精确的步近电机,其最小步进角0.9度,易于平衡点的寻找;通过红外对管TCRT5000寻迹,实现了小车走直线等功能;系统显示部分选用图形点阵式液晶显示器OCJM4*8C,串行接口,编程容易,美观大方。采用单片机内部时钟实现精确计时。最后的实验表明,系统完全达到了设计要求,不但完成了所有基本和发挥部分的要求,并增加了路程显示、全程时间显示和语音播报三个创新功能。 关键词:倾角传感器,红外对管,步进电机,SPCE061A 1.系统方案 1.1 实现方法 本题要求设计并制作一辆电动小车,能实现在跷跷板上运动且在不同配重的情况下保持平衡等功能。我们想利用电机控制小车运行,角度传感器测量跷跷板水平方向倾角来确定小车何时达到平衡,利用寻迹模块实现小车沿直线行走以及在A点外某处能自动驶上跷跷板,还有显示模块以及语音模块等做为人机界面,实现显示及语音提示等功能。上述各模块的方案论证如下。 1.2 方案论证 1.2.1 控制器模块 方案一:采用ATMEL 公司的AT89C51。51单片机价格便宜,应用广泛,但是功能单一,如果系统需要增加语音播报功能,还需外接语音芯片,实现较为复杂;另外51 单片机需要仿真器来实现软硬件调试,较为烦琐。 方案二:采用凌阳公司的SPCE061A 单片机作为控制器的方案。该单片机I/O 资源丰富,并集成了语音功能。芯片内置JTAG电路,可在线仿真调试,大大简化了系统开发调试的复杂度。 根据本题的要求,我们选择第二种方案。 1.2.2 电机模块 电机模块选择是整个方案设计的关键,按照设计要求,小车需在C点和有配重的情况下分别达到平衡状态,这需要对小车的精确控制,而且小车制动性能要好。因此普通直流电机不能满足要求。 方案一:采用直流减速电机控制小车的运动,直流减速电机力矩大,转动速度快,但其制动能力差,无法达到小车及时停车的要求。
电动车控制器原理及编程
电动车控制器原理及编程2008-10-29 15:34
电动车控制器原理及编程 https://www.360docs.net/doc/301712634.html,/html/blog/7597/45892.htm 云翔电动车维修的BLOG https://www.360docs.net/doc/301712634.html, 原信息URL:https://www.360docs.net/doc/301712634.html,/html/blog/7597/45892.htm 控制器 无刷控制器硬件电路详解 电动车无刷电机是目前最普及的电动车用动力源,无刷电机以其相对有刷电机长寿,免维护的特点得到广泛应用,然而由于其使用直流电而无换向用的电刷,其换向控制相对有刷电机要复杂许多,同时由于电动车负载极不稳定,又使用电池作电源,因此控制器自身的保护及对电机,电源的保护均对控制器提出更多要求。 自电动车用无刷电动机问世以来,其控制器发展分两个阶段:第一阶段为使用专用无刷电动机控制芯片为主组成的纯硬件电路控制器,这种电路较为简单,其中控制芯片的代表是摩托罗拉的MC33035,这个不是这里的主题,所以也不作深入介绍。第二阶段是以MCU为主的控制芯片。这是这篇文章介绍的重点,在MCR 版本的设计中,揉和了模拟、数字、大功率MOSFET驱动等等许多重要应用,结合MCU智能化控制,是一个非常有启迪性的设计。 今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1: 图1:350W整机电路图 整机电路看起来很复杂,我们将其简化成框图再看看: 图2:电路框图 电路大体上可以分成五部分: 一、电源稳压,供应部分; 二、信号输入与预处理部分; 三、智能信号处理,控制部分; 四、驱动控制信号预处理部分; 五、功率驱动开关部分。 下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。 图3:PIC16F72在控制器中的各引脚应用图 我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。内部软件资源我们在软件部分讲解,这里并不需要很关心。
电动自行车控制器设计.
基于中颖SH79F081的电动自行车控制器设计 摘要:方波驱动的无刷直流电机由于力矩大, 运行可靠, 在电动车控制器中广泛应用, 方波驱动最大的缺点在于换相时的电流突变引起的转矩脉动, 导致噪声较大, 但好的控制策略可以大大改善换相噪声. 电动车控制器设计的难点在于电流控制, 本文就电动车控制器设计的一些关键地方加以描述. 关键词:电动车控制器直流无刷电机换相同步整流 概述 电动自行车上使用的电机普遍采用永磁直流电机. 所谓永磁电机, 是指电机线圈采用永磁体激磁, 不采用线圈激磁的方式. 这样就省去了激磁线圈工作时消耗的电能, 提高了电机机电转换效率, 这对使用车载有限能源的电动车来讲, 可以降低行驶电流, 延长续行里程. 永磁直流电机按照电机的通电形式来分, 可分为有刷电机和无刷电机两大类, 有刷电机由于采用机械换相装置导致可靠性和寿命降低, 因此逐渐退出电动车市场. 无刷电机又可分为有传感器和无传感器两类, 对于无位置传感器的无刷电机, 必须要先将车用脚蹬起来, 等电机具有一定的旋转速度以后, 控制器才能识别到无刷电机的相位, 然后控制器才能对电机供电. 由于无位置传感器无刷电机不能实现零速度启动, 所以现在生产的电动车上用得较少. 目前电动车行业内使用的无刷电机, 普遍采用有位置传感器无刷电机. 有位置传感器永磁直流无刷电机按照内部传感器的安装位置不同, 又可分为60度电机和120度电机. 在120°的霍尔信号中, 不可能出现二进制000和111的编码,
所以在一定程度上避免了因霍尔零件故障而导致的误操作. 因为霍尔组件是开漏输出, 高电平依靠电路上的上拉电阻提供, 一旦霍尔零件断电, 霍尔信号输出就是111. 一旦霍尔零件短路, 霍尔信号输出就是000, 而60°的霍尔信号在正常工作时这两种信号均会出现, 所以一定程度上影响了软件判断故障的准确率. 因此目前市面马达已经逐渐舍弃60°相位的霍尔排列. 2. 永磁直流电机基本原理 2.1. 主回路电路 1.
电动车跷跷板设计报告
电动车跷跷板 学校:滨州学院 参赛学生:王璐 李润国 乔文静 专业:电子信息科学与技术 机械设计制造及其机器自动化指导教师:贾荣丛、高坤
电动车跷跷板 摘要: 本系统采用AT89S52作为主控制芯片,再加上黑白传感器、角度传感器等传感器,完成了规定时间内定点停车、保持平衡,倒车至指定位置、能够沿直线行进基本的功能。 关键词:AT89S52,黑白传感器,角度传感器。 Abstract: This system with AT89S52 for core controller, realization pass to add Black-and-white sensor, Angle Sensors and LCD. To spread feeling to equip completion provision time to be a little bit already decided parking and hold the balance in refit behind small car bodywork towards refitting behind commonly the intelligence of the car control, reverse the car to appointed position, advance along the straight lineof essential function. Keyword: AT89S52, Black-and-white sensor, angle sensor.
目录 1.系统方案 (4) 1.1 微控制器模块 (4) 1.2车体设计 (4) 1.3电机模块 (5) 1.4电机驱动模块 (5) 1.5寻迹传感器模块 (5) 1.6 角度传感器模块 (6) 1.7电源模块 (6) 1.8显示模块 (6) 1.9最终方案 (6) 2.主要硬件电路设计 (7) 2.1电机驱动电路的设计 (7) 2.2黑白线检测电路的设计: (7) 2.3角度检测电路的设计: (8) 3.软件实现 (9) 3.1理论分析 (9) 3.2总体流程图 (9) 3.3直线调节流程图 (10) 3.4平衡调节流程图 (11) 3.5返回流程图 (12)
纯电动汽车整车控制器的设计
纯电动汽车整车控制器的设计 发表时间:2019-07-05T11:27:03.790Z 来源:《电力设备》2019年第4期作者:王坚 [导读] 摘要:随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。 (柳州五菱汽车工业有限公司广西柳州 545007) 摘要:随着社会的发展与科技的进步,各个城市的汽车使用户喷井式增加。传统的内燃机汽车消耗石油,排出大量废气,使得城市的空气质量不断下降。纯电动汽车由于不使用传统化石能源,对环境不造成污染,受到人们的青睐。随着科技的进步,电动汽车的核心技术不断地革新与突破,逐渐完善的城市基础设施提供了有利的帮助,电动汽车已经成为潜力股,逐步取代传统汽车变为可能。本文从汽车结构出发,结合整车信息传输过程,设计了整车控制器的软硬件结构。 关键词:纯电动汽车;整车控制器;硬件设计;软件设计 纯电动汽车作为新能源汽车的一种,以其清洁无污染、驱动能源多样化、能量效率高等优点成为现代汽车的发展趋势。整车控制器(vehicle control unit,VCU)作为纯电动汽车整车控制系统的中心枢纽,主要实现数据采集和处理、控制信息传递、整车能量管理、上下电控制、车辆部件控制和错误诊断及处理、车辆安全监控等功能。国外在纯电动汽车整车控制器的产品开发中,积极推行整车控制系统架构的标准化和统一化,汽车零部件厂商提供硬件电路和底层驱动软件,整车厂只需要开发核心应用软件,有利的推动了整车行业的快速发展。虽然国内各大汽车厂商基本掌握了整车控制器的设计方案,开发技术进步明显,但是对核心电子元器件、开发环境的严重依赖,所以导致了整车控制器的国产化水平较低。本文以复合电源纯电动汽车作为研究对象,针对电动汽车应有的结构和特性,对整车控制器的设计和开发展开研究。 一、整车控制系统分析与设计 (一)整车控制系统分析 复合电源纯电动汽车整车控制系统主要由整车控制器、能量管理系统、整车通信网络以及车载信息显示系统等组成。首先纯电动汽车整车控制器通过采集启动、踏板等传感器信号以及与电机控制器、能量管理系统等进行实时的信息交互,获取整车的实时数据,然后整车控制器通过所有当前数据对驾驶员意图和车辆行驶状态进行判断,从而进入不同的工况与运行模式,对电机控制系统或制动系统发出操控命令,并接受各子控制器做出的反馈。 保障纯电动汽车安全可靠运行,并对各个子控制器进行控制管理的整车控制器,属于纯电动汽车整车控制系统的核心设备。整车控制器实时地接收传感器传输的数据和驾驶操作指令,依照给定的控制策略做出工况与模式的判断,实现实时监控车辆运行状态及参数或者控制车辆的上下电,以整车控制器为中心通信节点的整车通信网络,实现了数据快速、可靠的传递。 (二)整车控制系统设计 复合电源的结构设计,选择了超级电容与DC/DC串联的结构,双向DC/DC跟踪动力电池电压来调整超级电容电压,使两者电压相匹配。为了车辆驾驶运行安全,同时为了更好地使超级电容吸收纯电动汽车的再生制动能量,在复合电源系统中动力电池与一组由IGBT组成双向可控开关,防止了纯电动汽车处于再生制动状态时,动力电池继续供电,降低再生制动能量的吸收效率。 整车CAN通信网络设计,由整车控制器(VCU)、电机控制器(motor control unit,MCU)、电池管理系统(battery management system,BMS)、双向DC/DC控制器以及汽车组合仪表等控制单元(Electronic Control Unit,ECU)组成了复合电源纯电动汽车的整车通信网络。 二、整车控制器硬件设计及软件设计 (一)整车控制器结构设计 整车控制器的硬件结构根据其基本的功能需求进行设计,如图1所示。支持芯片正常工作的微控制器最小系统是整车控制器的核心,基础的信号处理模块,CAN通信与串口通信组成的通信接口模块,以及LCD显示等其他模块分别作为它的各大功能模块。 图1 整车控制器硬件结构图 (二)整车控制器硬件设计 从功能上可以把整车控制器分为6个模块。 1)微控制器模块:本设计选用美国德州仪器公司TI的数字信号处理芯片TMS320F2812为主控芯片,负责数据的运算及处理,控制方法的实现,是整车控制器的控制核心。此芯片运算速度快,控制精度高的特点基本满足了整车控制器的设计需求。TMS320F2812的最小系统主要由DSP主控芯片、晶振电路、电源电路以及复位电路组成。 2)辅助电源模块:由于整车控制器的控制系统中用到多种芯片,所以需要设计辅助电源电路为各个芯片提供电源,使其正常工作,因此输出电平有多种规格。采用芯片LM317、LM337可分别产生+5V和-5V的供电电压。 3)信号调理模块:输入整车控制器的踏板信号是1~4.2V模拟电压信号,TMS320F2812的12位16通道的A/D采样模块输入的信号范围为0~3.0V,因此需要对踏板输入的模拟电压信号进行相应的调理运算,以满足DSP的A/D采样电平要求。选用德州仪器的OPA4350轨至轨运算放大器,在输入级采用RC低通滤波电路与电压跟随电路以滤除干扰信号,减小输入的模拟信号失真。开关信号先经RC低通滤波电路滤除高频干扰,再作为电压比较器LM393的正端输入,电压比较器的负端输入接分压电路,将LM393的输出引脚外接光耦芯片,在起到电平转换作用的同时,进一步隔离干扰信号,提高信号的安全性与可靠性。 4)通讯模块:TMS320F2812具有一个eCAN模块,支持CAN2.0B协议,可以实现CAN网络的通讯,但是其仅作为CAN控制器使用。选用3.3V单电源供电运行的CAN发送接收器SN65HVD232D,其兼容TMS320F2812的引脚电平,用于数据速率高达1兆比特每秒(Mbps)的应
跷跷板小车制作
电动车跷跷板 设计任务: 设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。配重的位置可以在从始端开始的200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸。电动车从起始端A出发,可以自动在跷跷板上行驶。电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示。 图1 起始状态示意图 设计思路:因为小车要在跷跷板上自动寻找平衡点所以要有一个平衡装置当小车倾斜时小车就会向前或后走的地方走而达到平衡。因为翘翘板的宽度较小所以要小车按固定的直线行走,小车要时刻记时所以用电子显示装置计时。 基本设计 (1)平衡部分 因为小车在板上寻找平衡点所以要用到平衡装置有以下三个方案 方案一:利用SCA100T传感器。 SCA100T优点:(1)双轴倾角传感器。 (2)测量范围0.5g或者1g。 (3)单极5伏供电,比例电压输出。 (4)长期稳定性非常好。 (5)高分辨率,低声,工作温度范围广。 缺点:灵敏度太高,价格昂贵,抗干扰能力差。 方案二:利用水银开关。 优点:(1)价格低,容易买到。 (2)制作方便,操控性好。 (3)工作范围广 缺点:不稳定,水银液体不太容易控制。 方案三:利用旋转型可调电阻和铅坠。
优点:(1)价格低,容易组装。 (2)操控性好,灵敏度高。 (3)可以利用电阻的变化算出倾斜角。 缺点:有摩擦影响,受外界影响。 综上所述:经比较方案三比较好实验室中可以找到所用器材,可以通过电阻的变化算出倾角,价格较为便宜。 方案三的具体方法:首先将可变电阻的旋钮与铁杆连接起来,铁杆的另一端是较重的铅锤。当小车的倾角变化时由于铅锤的重力作用在小车的带动下可变电阻的阻值产生变化,电压或电流发生变换传给单片机从而控制小车来找平衡点。 平衡装置原理图:
电动汽车控制系统设计设计
电动汽车控制系统设计设计
摘要 在当前全球汽车工业面临金融危机和能源环境问题的巨大挑战的情况下,发展电动汽车,利用无污染的绿色能源,实现汽车能源动力系统的电气化,推动传统汽车产业的战略转型,在国际上已经形成了广泛共识。 本课题以电动汽车他励电机控制器为例,以实现电动汽车的加、减速,起、制动等基本功能以及一些特殊情况下的处理。以开发出高可靠性、高性能指标、低成本并且具有自主知识产权的电动汽车电机驱动控制系统为目的。主要包括硬件电路板的设计,以及驱动系统的软件部分的仿真调试。 在驱动系统硬件设计中,这里主控制芯片采用ATMEL公司的ATmega64芯片。功率模块采用多MOSFET并联的方 37
式,有效的节约了成本。电源模块采用基于UC3842的开关电源电路。选用IR 公司的IR2110作为驱动芯片,高端输出驱动电流可到1.9A,低端输出驱动电流可到2.3A,能够提供7个MOSFET并联时驱动电流。对于电流检测模块,本文没有采用电流传感器或者是康铜丝,而是采用了一种基于MOSFET管压降的电流检测电路,这种方式即节约了成本也保证了检测精度。 驱动系统的软件设计中,主要实现的功能为:开关量的检测处理,故障检测,串口通讯,励磁、电枢控制,报警功能等。针对他励电机电动汽车的控制特性,提出了节能控制算法和最大转矩控制算法,用于提高电动汽车的续航里程和加速性能。 他励直流电动机驱动系统能够很 37
好的运行在电动汽车上,性能可靠、结构简 单,并且节约了成本,使电动汽车的性价比大大提高,有利于电动汽车的普及。 关键词:电动汽车,ATmega64,他励直流电机,PID模糊控制 37
电动车跷跷板报告
电动车跷跷板报告 【摘要】:本系统采用遥控电动小汽车改装而成,主要由89C52和模拟电路为核 心器件,实现对智能电动车行驶的自动控制。整车长23 厘米,宽5厘米,运行性能良好,符合设计要求。电动车平衡检测使用倾角传感器。电动智能小车电路由平衡检测电路、计时显示电路、电机驱动电路等组成,它不需要遥控就能按要求行走。 一、方案的选择与论证 根据题目要求,系统可以以划分为几个基本模块,如图1.1所示 图1.1 1、步进电机驱动调速模块 方案一:采用与步进电机相匹配的成品驱动装置。使用该方法实现步进电机驱动,其优点是工作可靠,节约制作和调试的时间,但成本很高。 方案二:采用集成电机驱动芯片LA298。采用该方法实现电路驱动,简化了电路,控制比较简单,性能稳定,但成本较高。 方案三:采用互补硅功率达林顿管ULN2003实现步进电机的驱动。采用该方法实现步进电机的驱动,电路连接比较简单,工作也相对可靠,成本低廉,技术成熟。 基于上述理论分析,最终选择方案三。 2、平衡检测模块 方案一:采用精密的倾角传感器,这种传感器对应每个角度输出一个固定电流。可以实现精确控制,但价格昂贵。 方案二:采用简易的倾角传感器,它直接输出一个开关量。当其与地面垂直时,两触点断开;若倾斜角度超出一定范围,两触点短接。这种传感器价格低廉,使用方便。 基于上述分析,最终选择方案二。 3、显示模块 方案一:采用数码管显示。数码管具有经济、低功耗、耐老化和精度比较高等优点,但它与单片机连接时,需要外接存储器进行数据锁存。此外,数码管只能显示少数几个字符。 方案二:采用LCD进行显示。LCD具有功耗低、无辐射、显示稳定、抗干
基于单片机的电动车控制器
单片机原理与应用 课程设计报告 电动车控制器 专业班级:电气工程及其自动化xxx班姓名: 时间: 2010.3.3—3.19 指导教师:xxxxxxxxxxxxxxxxxxxxxxxxx 2010年 3 月19日
基于单片机的电动车控制器 一.设计要求 (一)基本功能 1.显示:实时显示电瓶的电量;车速 2.线性调速功能: 要求采用传统的手把调速方式(通过线性霍尔传感器),此处对霍尔器件的电压处理要求利用压频转换来代替A/D转换。 3.具备完善的保护功能: 如过载保护、欠压保护、短路保护和防飞车等功能。 (二)扩展功能 1.可增加实时的总里程显示 2.速度具有一定的记忆功能 二.计划完成时间三周 1.第一周完成软件和硬件的整体设计,同时按要求上交设计报告一份。 2.第二周完成软件的具体设计和硬件的制作。 3.第三周完成软件和硬件的联合调试。
目录 1引言 (1) 2总设计方案 (1) 2.1设计思路 (1) 2.2单片机介绍 (1) 2.3设计框图 (1) 3设计原理分析 (2) 3.1硬件设计 (2) 3.1.1最小系统 (2) 3.1.2时速控制电路 (3) 3.1.3驱动电路 (4) 3.1.4过流、欠压保护电路 (4) 3.1.5刹车保护 (4) 3.1.6显示电路 (5) 3.2软件设计 (5) 3.2.1主程序流程 (5) 4结束语 (6) 参考文献 (7) 符录1 (8) 符录2 (9)
基于单片机控制的电动车控制器 电气072班李占业 摘要:本系统由单片机系统、显示系统、驱动系统和数模转换系统组成。通过按键来控制单片机,通过P1口输出的具有时序的方波作为电动车的控制信号,使电动车的里程与转速发生变化,达到对电动车控制的目的。该设计具有结构简单、可靠性高、使用方便、可以实现较复杂的控制、具有较大的灵活性和适应性等特点。 关键词:电动车单片机ADC0809 A44E 1 引言 电动车控制器是用来控制电动车电机的启动、运行、进退、速度、停止以及电动车的其它电子器件的核心控制器件,它就象是电动车的大脑,是电动车上重要的部件。微型计算机的出现给人类生活带来了根本性的变化,使现代科学研究发生了质的飞跃,单片机技术的出现给现代生活带来了一次新的技术革命。本设计主要是设计一个由单片机控制的电动车控制器系统,操作者可通过系统的按钮控制电动车的旋转速度电量和里程。同时为了可以直观的看出电动车的运行状态,其旋转速度和当前电量可以在数码管上显示出来。 2 总体设计方案 2.1 设计思路 根据电动车的工作原理可以知道,电动车控制器是通过霍尔速度转把采集信号,然后通过数模转换将信号传给单片机,利用单片机控制输出用改变功率管控制信号PWM的方法来控制电动车的转速,用霍尔元件A44E安装在车轮上,车轮每转一圈霍尔器件就会给单片机一个脉冲,单片机根据这个脉冲的频率来计算车速并用数码管显示出来,另外为了保护电池当电池电压下降到一定程度的时候要有警示电路(用普通发光二极管警示)。并且要设计配套的刹车保护、欠压保护、过流保护等保护电路。 2.1.1 单片机的选用 单片计算机即单片微型计算机。(Single-Chip Microcomputer ),是集CPU ,RAM ,ROM ,定时,计数和多种接口于一体的微控制器。随着科学技术的发展,越来越多的智能化产品都用到了单片机。他体积小,成本低,功能强,广泛应用于智能产品和工业自动化上。而51 单片机是各单片机中最为典型和最有代表性的一种。本设计选用常见的AT89S51。 2.1.2 电动车电机的选用 目前电动车电机普遍采用永磁直流电机。所谓永磁电机,是指电机线圈采用永磁体激磁,不采用线圈激磁的方式。这样就省去了激磁线圈工作时消耗的电能,提高了电机机电转换效率,这对使用车载有限能源的电动车来讲,可以降低行驶电流,延长续行里程。本设计也选用此永磁直流电机。 2.1.3设计框图
电动车跷跷板说明书(1)
电动车跷跷板 设计并制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。配重的位置可以在从始端开始的200mm~600mm范围内调整,调整步长不大于50mm;配重可拆卸。电动车从起始端A出发,可以自动在跷跷板上行驶。在不加配重的情况下,电动车完成以下动作: (1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近。 (2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,给出明显的平衡指示。 (3)电动车从(2)中的平衡点出发,30秒钟内行驶到跷跷板末端B处(车头距跷跷板末端B不大于50mm)。 (4)电动车在B点停止5秒后,1分钟内倒退回起始端A,完成整个行程。 (5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。 图10.9.1 起始状态示意图 图10.9.2 平衡状态示意图 【项目知识点和技能点】 1、步进电机的应用和控制。
2、自动寻迹系统原理与应用。 3、角度传感器的原理和应用。 4、PTR8000无线发送与接收模块的应用。 5、AT89s52单片机模数转换的原理和应用。 8.2.2 总体设计方案 以单片机AT89S52为主要控制芯片,查询按键的输入,传输各种参数的显示,两台电机的正反转和速度控制以及两台电机的协调运动,负责光电检测信号的接收和对信号的处理,从而能够确定小车轨迹,在B点停止和返回,并最终停止。 角度传感器把角度信号输给单片机,把检测到的角度和基准角度比较,从而确定翘翘板的平衡点。寻找平衡点时主要是采用PID闭环控制算法,在小车行驶过程中每当小车翻过平衡点的时候都令小车向后退一段路程,直到小车再次翻过平衡点,小车再次向前行驶一段比前一段要小的距离直到翻过平衡点,最终找到平衡点。系统框图如8-13所示,由如下几个模块组成 控制模块——采用AT89S52单片机控制。 电机选择模块——采用四线两相步进电机。 显示模块——采用1602LCD液晶显示屏进行显示。 光电检测模块——采用反射式光电传感器检测跷跷板上黑线。 电机驱动模块——采用步进电机驱动电路。 角度检测模块——采用角度传感器检测。 【项目准备】 1、项目原理 本系统共可分为两部分:跷跷板平衡检测系统,以AT89s52单片机为控制核心, 将角度传感器连接在跷跷板中心的转动轴上以检测跷跷板摆动角度,,并通过无线 通讯模块将数据发送给电动车系统。 电动车系统也以AT89s52为控制核心,以两个步进电机分别与左右车轮同轴相连来作为电动车的动力装置,采用光电传感器检测引导线,利用无线通讯模块接收跷跷板 平衡检测系统发送的数据,单片机对数据进行智能分析,调整小车前进速度和方向,使跷跷板达到平衡状态。在电动车到达指定位置时,给出声光提示,同时液晶显示 屏显示时间和小车当前状态。其原理图如图10.9.3所示: 图10.9.3 电动车跷跷板系统原理图
电动汽车用整车控制器总体设计方案
电动汽车用整车控制器总体设计方案
目次 1 文档用途 (1) 2 阅读对象 (1) 3 整车控制系统设计 (1) 3.1 整车动力系统架构 (1) 3.2 整车控制系统结构 (2) 3.3 整车控制系统控制策略 (3) 4 整车控制器设计 (4) 5 整车控制器的硬件设计方案 (5) 5.1 整车控制器的硬件需求分析 (5) 5.2 整车控制器的硬件设计要求 (6) 6 整车控制器的软件设计方案 (7) 6.1 软件设计需要遵循的原则 (7) 6.2 软件程序基本要求说明 (7) 6.3 程序中需要标定的参数 (7) 7 整车控制器性能要求 (8)
整车控制系统总体设计方案 1 文档用途 此文档经评审通过后将作为整车控制系统及整车控制器开发的指导性文件。 2 阅读对象 软件设计工程师 硬件设计工程师 产品测试工程师 其他相关技术人员 3 整车控制系统设计 3.1 整车动力系统架构 如图1所示,XX6120EV纯电动客车采用永磁同步电机后置后驱架构,电机○3通过二挡机械变速箱○4和后桥○5驱动车轮。车辆的能量存储系统为化学电池(磷酸铁锂电池组○8),电池组匹配电池管理系 统(Battery Management System,简称BMS)用以监测电池状态、故障报警和估算荷电状态(State of Charge,简称SOC)等,电池组提供直流电能给电机控制器○2通过直-交变换和变频控制驱动电机运转。 整车控制器○1(Vehicle Control Unit,简称VCU)通过CAN(Control Area Network)和其它控制器联接,用以交换数据和发送指令。该车采用外置充电机传导式充电,通过车载充电插头利用直流导线联接充电 机○9,充电机接入电网。 ○1整车控制器○2电机控制器○3交流永磁同步电机○4变速箱○5驱动桥 ○6车轮○7电池管理系统○8磷酸铁锂动力电池组○9外置充电机○10电网连接插座 图1 整车动力系统架构简图
跷跷板设计图
摘要 本设计使用89C52单片机为主的微处理器作为电动车跷跷板的检测和控制核心,从而达到小车按迹寻规,正确行驶和精确显示等目的。当系统电路采用由激光发射管射到黑带时,接收管未检测到信号,输出端为低电平。当激光发射管射到地面或跷跷板时,它反射回来的光会被接收管检测到信号,输出端会输出一个高电平。此时检测到的信号会经过放大送到单片机处理,从而控制电机的正反转,并且使液晶显示器显示出一段路程的时间。在设计电动小车自动平衡系统中,包括中心处理单元、电机驱动、轨迹检测、角度检测、状态指示和用户接口等模块。系统采用光电检测电路和角度传感器构成闭环反馈电路,实现小车自动在跷跷板上寻找平衡点。采用激光对管检测引导线,控制行驶轨迹,液晶实时显示系统状态信息。 1、方案论证与比较 1.1系统方案 该系统由寻迹模块、单片机控制模块,电机执行模块,显示电路模块等构成。根据各模块实现的功能及所能达到的要求,通过电路分析总结出几种不同的方案。 1.1控制器部分 方案一采用常用的89C51控制。技术比较熟练,应用广泛,现在的51系列技术硬件发展的也非常得快,也出现了许多功能非常强
大的单片机,因此使用单片机可以实现要求的基本功能。但是为了实现多组预存信息,必须外加具有掉电存储功能的EEPROM,这增加了系统的复杂程度。而且在执行动态刷新的时候读取EEPROM的速度慢,刷新频率受到限制。 方案二应用ARM,ARM是一种功耗很低的高性能处理器,技术具有性能高、成本低和能耗省的特点。方便、安全、高效。作为嵌入式领域中最为广泛使用的32位处理器结构体系,ARM已经成为多个应用领域的标准CPU。ARM处理器技术正在成为多数嵌入式高端应用开发的首选。ARM2138芯片具有高达32KB的内存作为数据的缓冲区,因此能够实现非常快的读取速度。并具有丰富的I/O资源,而且其外围电路简单,在片内即可实现所有控制。简化了整个系统的复杂程度. 通过比较,我们选择方案二。 1.2寻迹部分 跷跷板板面我们采用优质KT板,在翘翘板中心贴25mm宽度的黑胶带作为电动车的引导。 方案一采用红外探测器。红外发射端二进制数字信号调制成某一频率脉冲形成发射出去,接收管一接收到的光脉冲转换成为电信号经
基于单片机的电动车控制系统设计
毕业设计 题目:基于单片机的电动车控制系统设计 毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期:
指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
年全国大学生电子设计大赛控制类赛题
第三届(1997 年)全国大学生电子设计竞赛题目 C 题水温控制系统 一、任务 设计并制作一个水温自动控制系统,控制对象为1 升净水,容器为搪瓷器皿。水温可 以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定的温度基本不变。 二、要求 1.基本要求 (1)温度设定范围为40~90℃,最小区分度为1℃,标定温度≤1℃。 (2)环境温度降低时(例如用电风扇降温)温度控制的静态误差≤1℃。 (3)用十进制数码管显示水的实际温度。 2.发挥部分 (1)采用适当的控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统的调 节时间和超调量。 (2)温度控制的静态误差≤0.2℃。 (3)在设定温度发生突变(由40℃提高到60℃)时,自动打印水温随时间变化的曲线。三、评分意见 第五届(2001 年)全国大学生电子设计竞赛题目 C 题自动往返电动小汽车 一、任务 设计并制作一个能自动往返于起跑线与终点线间的小汽'BB车。允许用玩具汽车改装,但 不能用人工遥控(包括有线和无线遥控)。
跑道宽度0.5m,表面贴有白纸,两侧有挡板,挡板与地面垂直,其高度不低于20cm。 在跑道的B、C、D、E、F、G 各点处画有2cm 宽的黑线,各段的长度如图1 所示。 二、要求 1.基本要求 (1)车辆从起跑线出发(出发前,车体不得超出起跑线),到达终点线后停留10 秒, 然后自动返回起跑线(允许倒车返回)。往返一次的时间应力求最短(从合上汽车电源开关开始计时)。 (2)到达终点线和返回起跑线时,停车位置离起跑线和终点线偏差应最小(以车辆中 心点与终点线或起跑线中心线之间距离作为偏差的测量值)。 (3)D~E 间为限速区,车辆往返均要求以低速通过,通过时间不得少于8 秒,但不允 许在限速区内停车。 2.发挥部分 (1)自动记录、显示一次往返时间(记录显示装置要求安装在车上)。 (2)自动记录、显示行驶距离(记录显示装置要求安装在车上)。 (3)其它特色与创新。 三、评分标准 四、说明 (1)不允许在跑道内外区域另外设置任何标志或检测装置。 (2)车辆(含在车体上附加的任何装置)外围尺寸的限制:长度≤35 cm,宽度≤15cm。(3)必须在车身顶部明显标出车辆中心点位置,即横向与纵向两条中心线的交点。 第六届(2003年)全国大学生电子设计竞赛题目 简易智能电动车(E 题) 一、任务
电动车跷跷板(J题)
电动车跷跷板(J题) 【高职高专组】 一、任务 设计并制作一个电动车跷跷板,要求跷跷板起始端一侧装有可移动的配重物体,配重物体位置可调范围不小于400mm。电动车从起始端出发,按要求自动在跷跷板上行驶。电动车跷跷板起始状态和平衡状态示意图分别如图1和图2所示。 图1起始状态示意图 图2平衡状态示意图 二、要求 1.基本要求 (1)先将跷跷板固定为水平状态,电动车从起始端A位置出发,行驶跷跷板的全程(全程的含义:电动车从起始端A出发至车头到达跷跷板顶端B位置)。停 止5秒后,电动车再从跷跷板的B端倒退回至跷跷板的起始端A,电动车能 分别显示前进和倒退所用的时间。前进行驶在1分钟内、倒退行驶在1.5分钟 内完成。 (2)跷跷板处在图1所示的状态下(配重物体位置不限制),电动车从起始端A出发,行驶跷跷板的全程。停止5秒后,电动车再从跷跷板的B端倒退回至跷 跷板的起始端A,电动车能分别显示前进和倒退所用的时间。前进行驶在1.5 分钟内、倒退行驶在2分钟内完成。
2.发挥部分 (1)由参赛队员将配重物体设定在可移动范围中的某位置,电动车从起始端A出发,当跷跷板达到平衡时,保持时间不小于5秒,同时发出声光提示,电动 车显示所用的时间。全过程要求在2分钟内完成。 (2)在可移动范围内任意设定配重物体的位置(由测试人员指定),电动车从起始端A出发,当跷跷板达到平衡时,保持时间不小于5秒,同时发出声光提示, 电动车显示所用的时间。全过程要求在2分钟内完成。 (3)其他。 三、说明 1.跷跷板长1600mm、宽300mm。为便于携带也可将跷跷板制成折叠形式。 2.跷跷板中心固定在直径不大于40mm的圆轴上,圆轴两端支撑在两个支架上,与 支架圆滑接触。跷跷板在图2所示的平衡状态下,跷跷板底距地面或桌面的距离为70mm。 3.允许在跷跷板面上画有寻迹线。 4.电动车(含车体上的其它装置)的外形尺寸规定:长≤300mm,宽≤200mm。测试 过程中电动车外形尺寸不允许变动。 5.电动车不允许采用有线或无线遥控,电动车自身应具备转弯功能。 6.电动车行驶距离的测量以车尾为基准。 7.平衡状态的含义是:当跷跷板出现上下摆动,且B端底部与水平状态的偏移量≤ 60mm范围内时,可视为进入平衡状态。 四、评分标准