PIV在低速风洞中的应用
第12卷 第2期流体力学实验与测量V o l.12,N o.2
EXPER I M EN T S AND
1998年6月M EA SU R E M EN T S I N FLU I D M ECHAN I CS Jun.,1998
P IV在低速风洞中的应用Ξ
刘宝杰 王光华 高 歌
北京航空航天大学,北京 100083
袁辉靖
北京大学特赛流动测量研究中心,北京 100871
摘要 利用在线式P I V系统,采用互相关的分析方法,以较高雷诺数下圆柱绕流和翼型
尾流为例,对P I V在低速风洞实验研究中的应用作一简要介绍,旨在表明当前P I V技术的一
些特点及其用于风洞实验研究的潜力。实验中所采用的P I V系统,反映了近几年来P I V技术
的一些新特点:一体化大能量双激光器系统、T S I公司的互 自相关CCD和高速帧采集板
(F ram e Grabber)等。
关键词 在线式P I V;互相关;风洞测量;圆柱绕流;翼型尾流
中图号 V211.7;O357.5
0 引 言
P I V(粒子图像测速技术)是在流动显示技术的基础上,利用图像处理技术发展起来的一种新的流动测量技术,通过跟踪示踪粒子来判断速度的大小和方向。当前P I V作为一种可靠的整体测量技术,获得了普遍的接受。P I V技术的重要特点就是突破了空间单点测量技术的局限性,可在同一时刻记录下整个测量平面的有关信息,从而可以获得流动的瞬时平面速度场、脉动速度场、涡量场和雷诺应力分布等。因此P I V非常适于研究涡流、湍流等复杂的流动结构,这是其它单点测量技术难以或无法做到的。同时现在的P I V系统还具备了与单点测量仪器(如激光多普勒风速计LDV等)相当的空间分辨率。因此即使仅限于二维测量,P I V也是一种先进的研究复杂流动的定量工具。此外,三维P I V技术在近几年内也获得了较大的发展,期望在不久的将来能应用于实际流动测量。
风洞是流体力学研究的基本手段,一直受到了较高重视。风洞的测量方法随着测试技术的飞速发展,也一直在不断地完善之中。由于P I V技术的上述发展,将P I V直接应用于风洞等大型实验设备的研究,在国际已经得到了普遍的认可,实际应用的例子越来越多。 本实验是利用在线式P I V系统,以低速风洞中的圆柱绕流和翼型尾流为例,对P I V 在低速风洞实验研究中的应用作一简要介绍,旨在表明当前P I V技术的一些特点,及其应用于风洞这类大型实验设备研究的潜力。本实验中所采用的P I V系统的配置,基本上体现了近几年发展并成熟起来的P I V系统的一些特点:如一体化大能量的双激光器系统
Ξ:19971006
(0.2J Pu lse );互 自相关CCD ;高速的图像采集板;以及基于W indow s N T 4.0的32位的图像采集、分析和后处理软件等。由于上述技术的应用,使该系统具备了采集图像的实时显示和分析的能力。
在实际测量中,恰当的示踪粒子生成和散播,是P I V 这类设备取得好的测量结果的关键技术之一。根据P I V 测量对示踪粒子的要求,并结合风洞的实验条件,本文作者通过合作开发了适于P I V 、LDV 等激光测速仪使用的L Z L 系列粒子发生器,基本可以满足这些实验的要求。
1 实验设备和方案
1.1 低速风洞
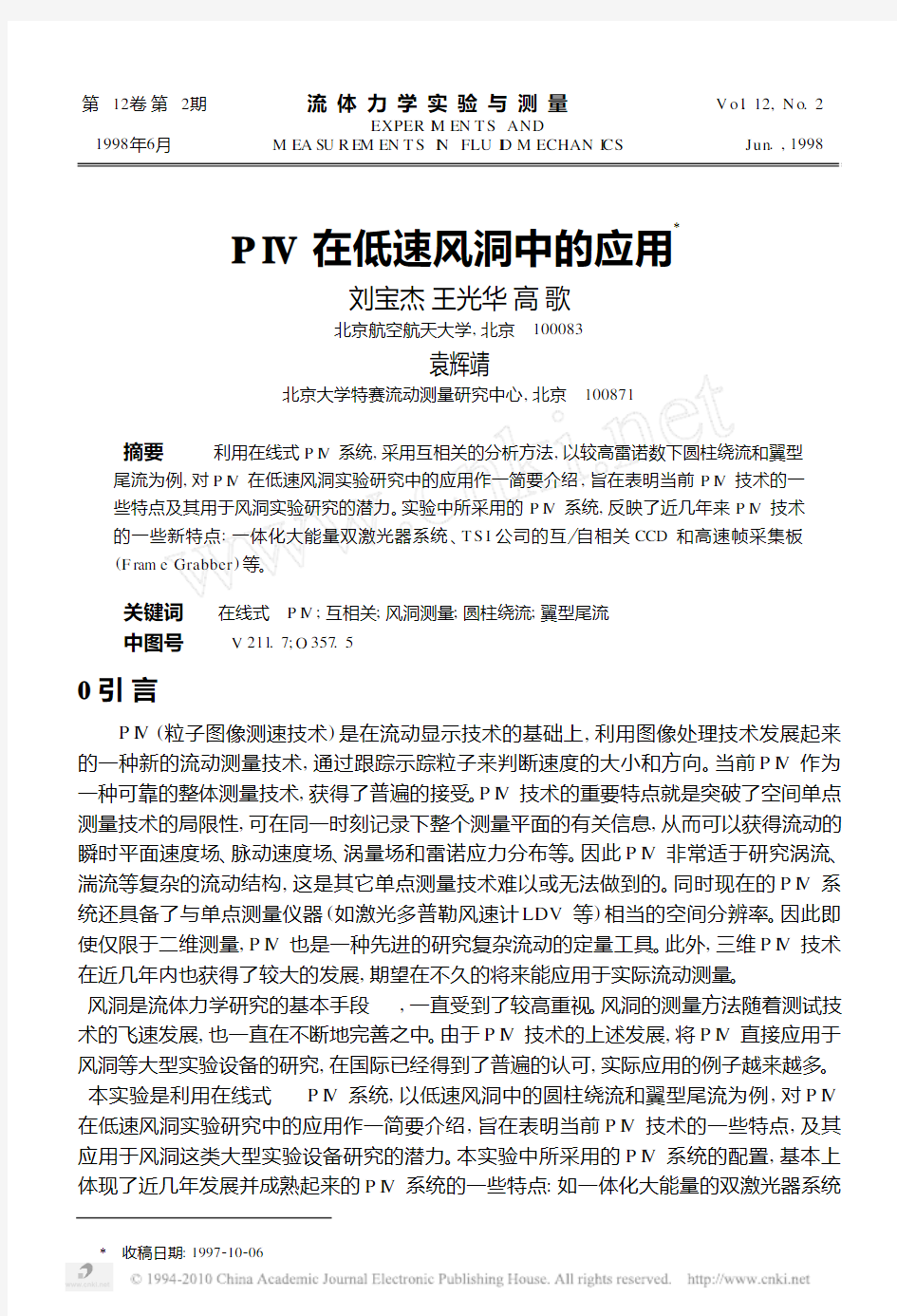
本实验是在北京航空航天大学航空发动机国防科技气动热力重点实验室的多功能低速风洞中完成的,该直流式风洞采用了后部吸气方式(如图1所示),其矩形切角闭口式实验段的尺寸为0
.56m ×0.8m ×1.5m 。风洞的流场校测结果如表1所示。
图1 低速风洞结构示意图
F ig .1 Sketch of the low speed wi nd tunnel
表1 流场校测结果Table 1 W i nd tunnel f low f ield character istics
动压稳定性:
Γ≤0.5%速度均匀性:ΡV ≤0.5%紊流度:
Ε≤0.25%平均气流偏角:?Α≤0.3°?Β≤0.3°轴向静压梯度:L d C P d X ≤0.5%稳定风速范围:10~80m s
1.2 在线式P IV 系统
1.2.1 脉冲式双Nd :Yag 激光器系统
在本P I V 系统中采用的激光器系统,是由两台N d :Yag 激光器及光路调整系统封装成一体的。激光器的工作频率为10H z ,每个脉冲能量为200m J ,两激光器脉冲间隔的可调整范围为200n s 到0.1s ,因此可以满足从低速到高速流动的测量需要。
1.2.2 互 自相关CCD
对于高像密度的图像,其典型的从中提取粒子位移,进而获得速度的方法是自相关和互相关。由于自相关函数的对称性,在自相关中通常要用到图像偏置或图像滞后等技术以解决位移方向的模糊问题。而在互相关中,由于已知两帧图像的时间顺序,位移的方向问题也就解决了。由于在互相关计算时只有一个信号峰值,而且在最理想的互相关计算中,没有粒子对的损失,所以互相关对粒子图像的分析能力有较大提高。
为了在较高速度下采用互相关的方法,不但需要新研制出的互 自相关CCD 摄像机,
65流体力学实验与测量(1998年)第12卷
而且还需结合“跨帧”技术和数据矩阵快速传输技术。本实验中所使用的互 自相关CCD 摄像机的分辨率为640×480像素,采集速度为30帧 秒;所用的图像采集板支持60M s 的传输速率。以上这些技术使得互相关的方法对于大多数的低速流动测量都是可以采用的。
1.2.3 图像采集软件
P I V 系统的控制和分析软件为In sigh t N T ,其工作平台是W indow s N T 4.0。该软件具备连续捕获1000帧的高分辨率(1k ×1k )图像的能力;具有批处理功能,可以实现对不同的图像在相同的位置进行速度场分析。
1.2.4 P I V 系统布置及参数设置
图2 P I V 系统示意图F ig .2 P IV syste m conf iguration
P I V 系统的布置如图2所示。
在本实验中采用同步器使N d :Yag 激光器系统和R S 2
170CCD 相匹配,在同步器上可以设置激光
的工作方式(双脉冲式)、CCD 的工作方式、
脉冲的延迟时间和双脉冲的时间间隔等。
CCD 、
同步器和激光器的工作时钟匹配如图3所示。系统工作时,CCD 的帧同步信号是主
同步信号,同步器通过捕捉CCD 的脉冲信
号,然后根据所设定的脉冲延迟时间和脉冲
间隔时间来准确地控制激光器的发光
。图3 P I V 系统工作时钟示意图
F ig .3 P IV syste m ti m i ng di agram
CCD 的工作频率为30帧 秒,每两帧图像之间的最小时间间隔约为15Λs 。受激光器的工作频率(10H z )的限制,系统的最大图像采集率为20帧 秒。由于互相关需要两帧图像来进行图像分析,这样系统最大采样率为10个速度场 秒。
本实验采用一个由球面镜(FL :1000mm )和柱面镜(FL :200mm )组成的光学组件,将激光变为所需的片光。在CCD 的采集区域内,片光的厚度小于1.0mm ,CCD 采集区域的大小约为40mm ×30mm 。
根据A drian (1990)数值模拟的研究表明,P I V 系统的若干参数的选择应遵循如下原则(互相关与其略有差别[6]):
N I >10~20,即每个查问域内有效的粒子对应该多于10对。这个要求是为了获得较高的有效数据率,而其实际上是对实验时散播的示踪粒子浓度提出了限制。查问域(判读域)内的粒子对数目不仅取决于粒子散播的浓度,还取决于查问域的大小和激光脉冲之间
75第2期刘宝杰等:P I V 在低速风洞中的应用
的间隔。
u 2+v 2?t <14d I M
,即最大的粒子位移为查问域大小的25%。这个要求是为了提高查问域中的有效粒子对的百分比,获得较高的有效数据率。粒子位移与查问域尺寸之比,可以通过改变查问域的尺寸、图像偏置量和激光脉冲之间的间隔来实现。
w ?t <14
?z 0,即粒子在垂直激光片光平面方向的最大位移为激光片光厚度的25%,该参数是为了防止有效粒子对的损耗。为了控制这个参数,可以调节激光片光的厚度和激光脉冲之间的间隔。
?u u
<0.2,即查问域内速度的相对变化量不超过20%。为了控制这个参数,应使查问域足够小,从而使得单个矢量能够充分地描述该测量点的流动状态。
1.2 针对本实验所用的P I V 系统的配置,根据以上原则以及相应的实验风速,系统的几个参数的选择如下:脉冲的间隔时间:20~50Λs ;脉冲的延迟时间:83.265m s ;查问域为64×64P ixels (4.86mm ×4.86mm )。 1.3 示踪粒子 在运用P I V 系统进行流动测量时,成功的示踪粒子产生与散播是获得理想的测量结果的保障,也是制约P I V 应用的限制条件之一。 为了能够准确测量高速流动、湍流和分离流等复杂流动,示踪粒子必须具备:良好的跟随性;对所用激光有较高的散射率;而且在测量域内散播的示踪粒子浓度必须恰当。因此示踪粒子从产生到散播,都必须精心设计。 示踪粒子的跟随性主要取决于粒子的直径,粒子的密度和形状等参数也有一定的影响。在定常加速流中,L ou renco (1994)计算了粒子直径对粒子跟随性的影响,其结果表明:较大的粒子在强加速流动中存在明显的滞后;为了较好地跟踪高速流动,示踪粒子的直径应在0.5Λm 左右。 根据P I V 测量对示踪粒子的要求,结合风洞的实验条件,本文作者通过合作开发了适于P I V 、LDV 等激光测速仪使用的L Z L 系列粒子发生器。L Z L 21型粒子发生器是针对P I V 测量而开发的,其工作原理示意图如图4所示:物料由直流调速泵注入蒸发器,在蒸发器中加热至合适的温度,然后喷入粒子混合器,在粒子混合器中冷凝成烟雾并与空气均匀混合后输出(见图4)。 L Z L 系列粒子发生器具有较高的控温精度,从而保证了所生成的 图4 L Z L 21型粒子发生器原理示意图 F ig .4 Sketch of the particle generator pr i nc iple 粒子质量;为了提高其工作的可靠性,该系列 粒子发生器还设置了低液位警告,超、低温保 护及报警功能。 L Z L 系列粒子发生器的主要特点如下: 可连续、均匀、稳定地发烟 粒径范围为0.6~1.2Λm 可以更换物料 对人体无害85流体力学实验与测量(1998年)第12卷 良好的经济性 为了保证示踪粒子散播时不干扰流场,在本实验中,示踪粒子是由粒子发生器出口通过导管直接引到风洞入口处的,导管的末端接有一圆转方的扩张段。所散播的示踪粒子,经过风洞的蜂窝器、阻尼网、稳定段、收缩段,到达实验段。 2 实验结果与分析 2.1 圆柱绕流 分离流是一种复杂的、重要的流体流动现象。本文首先以圆柱绕流的近尾迹流动为例,来说明当前的P I V 系统在测量分离流动上的能力。 圆柱在风洞中垂直气流的来流方向安放。圆柱直径为40mm ,长径比为12,实验风速 为20m s ,以其直径为特征长度的雷诺数为 5.1×104。 图5 圆柱后部的瞬时速度场(来流方向向上) F ig .5 I n stan taneous veloc ity f ield 图5是将速度场与原始的粒子图像叠加后的结果,整个图像都位于圆柱的分离区内,图中圆柱位于下方,自由来流为20m s ,方向向上。 图6是对应的瞬时涡量图,图7是对应的瞬时流线图。 从涡量图可以发现瞬时流场中部存在着三个涡量高峰,两个为正,一个为负。由流线图的拓扑分析可以得知,在此瞬态流场内存在着节点、焦点和鞍点等,而且有的节点间存在着质量交换,流动形态很复杂。从瞬时速度场中可以看出,速度分布的大小和方向都是比较复杂的。测量结果表明:当前的P I V 技术可以胜任测量这类复杂的分离流动。 95第2期刘宝杰等:P I V 在低速风洞中的应用 剪切层流动是另一种复杂且重要的流体流动现象,下面以机翼尾迹流动为例,来说明当前的P I V 系统在测量剪切层流动上的能力 。 图6 瞬时涡量场 F ig .6 I n stan taneous vortic ity con tour 图7 瞬时流线图F ig .7 I n stan taneous stream li ne 图8 翼型实验示意图 F ig .8 Sketch of the a irfo il exper i m en t conf iguration 图9 翼型尾流瞬时速度场F ig .9 I n stan taneous veloc ity 实验以二维NA CA 0012翼型为例,进行了翼型尾流的测量。翼型弦长250mm ,展长 500mm 。实验风速为20m s 和40m s ,以其弦长为特征长度的雷诺数为3.2×105和6.4× 105。翼型实验示意图如图8所示,采集域距翼型尾缘0.4倍弦长。图9是机翼尾流粒子图像与瞬时速度场的叠加。由于尾流中的速度方向一致,因此在瞬时速度场中很难直接分辨出尾迹涡结构。但在瞬时涡量场(图10)中,却可以看到有正反向涡的存在。 P I V 不但具备研究复杂流动空间结构的能力,而且通过连续的图像采集,可以研究某些复杂流动的时间历程。图11给出了连续采集的4幅脉动速度场的矢量图。 此外通过对连续采集的图像在相同的空间位置进行平均,还可以获得时间意义上统计平均的测量结果。对32帧图像在同一直线上的测量数据进行平均,可以得到时间统计 06流体力学实验与测量(1998年)第12卷 平均意义下的翼型尾迹速度分布曲线(图12所示)。 虽然翼型尾流的速度梯度较大,流场结构较为复杂,但测量结果表明,利用P I V 技术可以较好地研究这类流动现象 。 图10 瞬时涡量场(a )R e =6.4×105;(b )R e =3.2×105 F ig .10 I n stan taneous vortic ity con tour 图11 机翼尾流瞬时脉动速度场(R e =3.2×105) F ig .11 I n stan taneous f luctuati ng vector (u ’,v ’)map at con stan t ti m e separation (Re =3.2×105) 16第2期刘宝杰等:P I V 在低速风洞中的应用 3 结 论 在低速风洞中,利用在线式P I V系统,采用互相关分析方法, 本实验成功地对较高雷 图12 机翼尾流平均速度分布 (左R e=3.2×105,右R e=6.4×105)对比(攻角3°) F ig.12 Co mpar ison of mean veloc ity prof ile of a irfo il wake f low (L ef t:Re=3.2×105,R ight:Re=6.4×105,Α=3°)诺数下的机翼尾流和圆柱近尾迹流动的瞬态流场进行了测量。通过测得的瞬时速度场,可以得到流动的涡量场、脉动速度场和流线图等。通过对连续多幅测量结果取时间平均的方法,还得到了时间统计平均意义下的机翼尾流速度分布曲线。这些实验结果表明: (1)P I V技术既具备了与LDV等单点测量仪器相当的分辨率,又可以得到整个测量平面内流动的瞬时速度场、涡量场、流线图和脉动速度场等有关信息,因此P I V技术对于研究涡流、湍流等复杂流动现象具有重要意义。 (2)P I V技术还可以得到连续多幅测量结果,便于研究一些复杂流动的时间历程;通 过对连续多幅测量结果进行平均,还可以得到时间统计平均意义下的测量结果。 (3)当前的P I V系统可以胜任在较大设备上,对较高雷诺数下的复杂流动的测量,是一种流体力学研究的先进手段。 参 考 文 献 1 A drian R J.Particle2i m ageing techniques fo r experi m ental fluid m echanics A nnu.R ev.F luid M ech.,1991,123:261~304 2 Keane R D and A drian R J.Op ti m izati on of particle i m age veloci m eters Part I:Double pulsed system s.M eas.Sci. T echno l.1990,1:1202~1215 3 L ourenco L and k ro thapalli A.A pp licati on of P I V in H igh2Speed W ind T unnel T esting(Invited).A I AA29420084 4 Yao C and Paschal K.P I V M easurem ent of A irfo il W ake2F low T urbulence Statics and T urbulent Structures.A2 I AA29420085 5 盛森芝等.飞速发展中的流动测量技术.北京大学特赛流动测量研究中心,1996. 6 Keane R P and A drian R J.T heo ry of C ro ss2co rre L ati on of P I V I m ages.A pp lied Sci R es1992,49:191~215 26流体力学实验与测量(1998年)第12卷 APPL I CAT I ON OF ON -L INE P IV S Y STE M IN LOW SPEED W IND TUNNEL L iu Baoj ie W ang Guanghua Gao Ge Be ij i ng Un iversity of Aeronautics &A stronautics ,Be ij i ng 100083 Y uan Hu ij i ng Be ij i ng Un iversity -TSI Fluid M easure men t Research Cen ter ,Be ij i ng 100871 Abstract O n 2line Particle I m age V eloci m etry (P I V )is u sed to investigate the tu r 2 bu len t w ake flow of a cylinder and a NA CA 0012airfo il in low speed w ind tunnel .T he co rresponding R eno lds num ber based on the cylinder diam eter and airfo il cho rd are 5.14×104and 3.2×105,6.4×105.T he ob jective of th is study is to test the p erfo r m ance of the on 2line P I V system in the m easu rem en t of com p lex vo rtex and tu rbu len t flow struc 2tu re at relatively h igh R eno lds num ber .T h is on 2line P I V system includes som e new ly developed techn iques ,such as C ro ss A u to Co rrelati on CCD ,h igh speed data tran sfer F ram e Grabber ,in tegrated dual N d :Yag laser .Fu rther studies app lying th is on 2line P I V system are p ropo sed . Key words on 2line P I V ;cro ss co rrelati on ;w ind tunnel m easu rem en t ;w ake flow of cylinder ;airfo il w ake flow (上接第54页) Zhang Shudao Han Zhaoyuan D epart men t of M odern M echan ics and Eng i neer i ng ,Un iversity of Sc ience and Technology of Chi na ,Hefe i 230027 Situ M i ng No .31Research I n stitute ,CASC ,Be ij i ng 100074 Abstract In th is p ap er ,an experi m en tal m ethod w as p resen ted fo r the investigati on of co ld in ternal flow field of superson ic in let com bu sto r of a dual 2com bu sti on scram jet by tak ing the exp eri m en t m odel as the test secti on of w ind tunnel and directly connect 2ing the beginn ing of in ternal in let of the scram jet m odel to the ex it of a con tou red noz 2zle .T he resu lts of p ressu re m easu rem en ts and op tical flow visualizati on show that under the experi m en tal conditi on described in th is pap er ,the shock tunnel cou ld be started and the scram jet m odel w o rked in the righ t state requ ired by the co ld in ternal flow of dual 2com bu sti on scram jet ,that m ean s the flow in the superson ic duct w as superson ic w h ile the flow in the p ilo t duct w as sub son ic . Key words scram jet engine ;dual 2com bu sti on ;in ternal flow 3 6第2期刘宝杰等:P I V 在低速风洞中的应用 2014年TI杯大学生电子设计竞赛题 G题:简易风洞及控制系统(高职) 设计制作一简易风洞及其控制系统。风洞由圆管、连接部与直 流风机构成,如右所示。圆管竖直放置,长度约40cm,内径大于 4cm且内壁平滑,小球(直径4cm黄色乒乓球)可在其中上下运动; 管体外壁应有A、B、C、D等长标志线,BC段有1cm间隔的短标 志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管 的气密性连接,圆管底部应有防止小球落入连接部的格栅。控制系 统通过调节风机的转速,实现小球在风洞中的位置控制。 2.要求 (1)小球置于圆管底部,启动后5秒内控制小球向上到达BC 段,并维持5秒以上。(20分) (2)当小球维持在BC段时,用长形纸板(宽度为风机直径的 三分之一)遮挡风机的进风口,小球继续维持在BC段。(10分) (3)以C点的坐标为0cm、B点的坐标为10cm;用键盘设定小球的高度位置(单位:cm),启动后使小球稳定地处于指定的高度3秒以上,上下波动不超过± 1cm。(10分) (4)以适当的方式实时显示小球的高度位置及小球维持状态的计时。(10分)(5)小球置于圆管底部,启动后5秒内控制小球向上到达圆管顶部处A端,且不跳离,维持5秒以上。(10分) (6)小球置于圆管底部,启动后30秒内控制小球完成如下运动:向上到达AB段并维持3~5秒,再向下到达CD段并维持3~5;再向上到达AB段并维持3~5, 再向下到达CD段并维持3~5;再向上冲出圆管(可以落到管外)。(20分)(7)风机停止时用手将小球从A端放入风洞,小球进入风洞后系统自动启动,控制小球的下落不超过D点,然后维持在BC段5秒以上。(10分) (8)其他自主发挥设计。(10分) (9)设计报告。(20分) 共1页,G-1 液压阀的选择 一个完整的液压系统是由以下四个部分组成:动力元件、执行元件、控制元件和辅助元件。其中的液压控制元件即液压控制阀(简称液压阀),是控制液压系统中油液的流动方向、调节系统的压力和流量的。将不同的液压阀经过适当的组合,可以达到控制液压系统的执行元件(液压缸与液压马达)的输出力和转矩、速度与运动方向等目的。任何一个液压系统,不论其如何简单,都缺少不了液压阀。液压阀性能的优劣,工作是否可靠,以及能否正确选用将对整个液压系统能否正常工作产生直接影响,它是液压系统分析、设计的关键部分之一,要引起足够重视液压阀的种类较多,根据不同的分类方法有以下几种类型。 1。根据用途分类 液压阀可分为三大类:方向控制阀(如单向阀、换向阀等)、压力控制阀(如溢流阀、顺序阀、减压阀等)以及流量控制阀(如节流阀、调速阀等)。 1)方向控制阀是液压系统中占数量比重较大的控制元件,它是利用阀芯与阀体间相对位置的改变来实现油路的接通或断开,以满足系统对油流方向的要求。 2)压力控制阀是利用作用于阀芯上的液压力与弹簧力相平衡的原理进行工作的,它是控制和调节液压系统油液压力或利用液压力作为控制信号控制其他元件动作的阀类。 3)流量控制阀是液压系统中控制液流流量的元件,它是依靠改变阀13通流面积的大小或通流通道的长短来改变液阻(压力降、压力损失),从而控制通过阀的流量,达到调节执行元件的运行速度的目的。这三类阀还可根据需要互相组合成为组合阀,以减少管路连接,使其结构更为紧凑,连接简单,并提高效率。最常用的是由单向阀和其他阀类组成的组合阀,如单向减压阀、单向顺序阀和单向节流阀等。 2。按操纵方式分类 液压阀可分为:手动阀、机动阀、电动阀、液动阀和电液动阀等。 3.按控制方式分类 (1)定值或开关控制阀这种阀借助干手轮、电磁铁、有压气体或液体等来控制液体的通路,定值地控制液体的流动方向、压力或流量。包括普通控制阀、插装阀和叠加阀。其中的插装阀是近几十年来发展起来的一种新型液压阀,由于它具有通流能力大(可达IO00L/min),密封性好,阀芯动作灵敏,抗污染能力强,结构简单,适用性好以及易于实现标准化等优点,在液压装置中得到了越来越多的应用。 (2)伺服控制阀它是一种根据输入信号(如电、机械和气动等信号)及反馈量,成比例地连续控制液压系统中的液流方向、压力和流量的阀类。包括机液伺服阀、电液伺服阀和气液伺服阀。 (3)比例控制阀(简称比例阀) 它是介于上述两类阀之间的一种阀。它可根据输入信号的大小,成比例地连续控制液压系统中的液流方向、压力和流量。是一种既具备一定的伺服性能,结构又较简单的控制阀。由于电液比例阀具有形式多样,容易组成使用电气及计算机控制的各种电液系统,控制精度高,安装使用灵活以及抗污染能力强等多方面优点,因此得到越来越多的应用。 4.按安装方式分类 (1)螺纹连接它是液压阀的各进出油口直接靠螺纹管接头与系统管道或其他阀的进出油1;1相连,又称管式连接。 单元七典型液压系统 学习目标: 1.掌握读懂液压系统图的阅读和分析方法 2.掌握YT4543型液压动力滑台液压系统的组成、工作原理和特点 3.掌握YB32-200型压力机液压系统的组成、工作原理和特点 4.掌握Q2—8汽车起重机液压系统的组成、工作原理和特点 5.能绘制电磁铁动作循环表? 重点与难点: 典型液压系统是对以前所学的液压件及液压基本回路的结构、工作原理、性能特点、应用,对液压元件基本知识的检验与综合,也是将上述知识在实际设备上的具体应用。本章的重点与难点均是对典型液压系统工作原理图的阅读和各系统特点的分析。对于任何液压系统,能否读懂系统原理图是正确分析系统特点的基础,只有在对系统原理图读懂的前提下,才能对系统在调速、调压、换向等方面的特点给以恰当的分析和评价,才能对系统的控制和调节采取正确的方案。因此,掌握分析液压系统原理图的步骤和方法是重中之重的内容。 1.分析液压系统工作原理图的步骤和方法 对于典型液压系统的分析,首先要了解设备的组成与功能,了解设备各部件的作用与运动方式,如有条件,应当实地考察所要分析的设备,在此基础上明确设备对液压系统的要求,以此作为液压系统分析的依据;其次要浏览液压系统图,了解所要分析系统的动力装置、执行元件、各种阀件的类型与功能,此后以执行元件为中心,将整个系统划分为若干个子系统油路;然后以执行元件动作要求为依据,逐一分析油路走向,每一油路均应按照先控制油路、后主油路,先进油、后回油的顺序分析;再后就是针对执行元件的动作要求,分析系统的方向控制、速度控制、压力控制的方法,弄清各控制回路的组成及各重要元件的作用;更后就是通过对各执行元件之间的顺序、同步、互锁、防干扰等要求,分析各子系统之间的联系;最后归纳与总结整个液压系统的特点,加深对系统的理解。 2.在此选用YT4543型组合机床动力滑台的液压系统,作为金属切削专用机床进给部件的典型代表。此系统是对单缸执行元件,以速度与负载的变换为主要特点。要求运动部件实现“快进一一工进一二工进一死挡铁停留一快退—原位停止”的工作循环。具有快进运动时速度高负载小与工进运动时速度低负载大的特点。系统采用限压式变量泵供油,调速阀调速的容积节流调速方式,该调速方式具有速度刚性好调速范围大的特点;系统的快速回路是采用三位五通电液换向阀与单向阀、行程阀组成的液压缸差动连接的快速运动回路,具有系统效率较高、回路简单的特点;速度的换接采用行程阀和液控顺序阀联合动作的快进与工进的速度换接回路,具有换接平稳可靠的特点;两种工进采用调速阀串联与电磁滑阀组成的速度变换回路实现两次工进速度的换接,换接平稳;采用中位机能为M型的电液换向阀实现执行元件换向和液压泵的卸荷。该系统油路设计合理,元件使用恰当,调速方式正确,能量利用充分。 激光传感器由激光器、激光检测器和测量电路组成。激光传感器是新型测量仪表,它的优点是能实现无接触远距离测量,速度快,精度高,量程大,抗光、电干扰能力强等。激光传感器工作时,先由激光发射二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号,并将其转化为相应的电信号。常见的是激光测距传感器,它通过记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。激光传感器的应用 利用激光的高方向性、高单色性和高亮度等特点可实现无接触远距离测量。激光传感器常用于长度、距离、振动、速度、方位等物理量的测量,还可用于探伤和大气污染物的监测等。 激光测长 精密测量长度是精密机械制造工业和光学加工工业的关键技术之一。现代长度计量多是利用光波的干涉现象来进行的,其精度主要取决于光的单色性的好坏。激光是最理想的光源,它比以往最好的单色光源(氪-86灯)还纯10万倍。因此激光测长的量程大、精度高。 激光测距 它的原理与无线电雷达相同,将激光对准目标发射出去后,测量它的往返时间,再乘以光速即得到往返距离。由于激光具有高方向性、高单色性和高功率等优点,这些对于测远距离、判定目标方位、提高接收系统的信噪比、保证测量精度等都是很关键的,因此激光测距仪日益受到重视。在激光测距仪基础上发展起来的激光雷达不仅能测距,而且还可以测目标方位、运运速度和加速度等,已成功地用于人造卫星的测距和跟踪。 激光测振 它基于多普勒原理测量物体的振动速度。多普勒原理是指:若波源或接收波的观察者相对于传播波的媒质而运动,那么观察者所测到的频率不仅取决于波源发出的振动频率而且还取决于波源或观察者的运动速度的大小和方向。所测频率与波源的频率之差称为多普勒频 液压控制阀介绍 ——插装阀 一、概述 二通插装阀是插装阀基本组件(阀芯、阀套、弹簧和密封圈)插到特别设计加工的阀体内,配以盖板、先导阀组成的一种多功能的复合阀。因每个插装阀基本组件有且只有两个油口,故被称为二通插装阀,早期又称为逻辑阀。 1、二通插装阀的特点 二通插装阀具有下列特点:流通能力大,压力损失小,适用于大流量液压系统;主阀芯行程短,动作灵敏,响应快,冲击小;抗油污能力强,对油液过滤精度无严格要求;结构简单,维修方便,故障少,寿命长;插件具有一阀多能的特性,便于组成各种液压回路,工作稳定可靠;插件具有通用化、标准化、系列化程度很高的零件,可以组成集成化系统。 2、二通插装阀的组成 二通插装阀由插装元件、控制盖板、先导控制元件和插装块体四部分组成。图1是二通插装阀的典型结构 图1 二通插装阀的典型结构 控制盖板用以固定插装件,安装先导控制阀,内装棱阀、溢流阀等。控制盖板内有控制油通道,配有一个或多个阻尼螺塞。通常盖板有五个控制油孔:X、Y、Z1、Z2和中心孔a(见图2 )。由于盖板是按通用性来设计的,具体运用到某个控制油路上有的孔可能被堵住不用。为防止将盖板装错,盖板上的定位孔,起标定盖板方位的作用。另外,拆卸盖板之前就必须看清、记牢盖板的安装方法。 图2 盖板控制油孔 先导控制元件称作先导阀,是小通径的电磁换向阀。块体是嵌入插装元件,安装控制盖板和其它控制阀、沟通主油路与控制油路的基础阀体。 插装元件由阀芯、阀套、弹簧以及密封件组成(图3 )。每只插件有两个连接主油路的通口,阀芯的正面称为A口;阀芯环侧面的称作B口。阀芯开启,A 口和B口沟通;阀芯闭合,A口和B口之间中断。因而插装阀的功能等同于2 位2 通阀。故称二通插装阀,简称插装阀。 图 3 插装元件 激光传感器的工作原理 及其应用 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT 激光传感器由激光器、激光检测器和测量电路组成。激光传感器是新型测量仪表,它的优点是能实现无接触远距离测量,速度快,精度高,量程大,抗光、电干扰能力强等。激光传感器工作时,先由激光发射二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号,并将其转化为相应的电信号。常见的是激光测距传感器,它通过记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。激光传感器的应用 利用激光的高方向性、高单色性和高亮度等特点可实现无接触远距离测量。激光传感器常用于长度、距离、振动、速度、方位等物理量的测量,还可用于探伤和大气污染物的监测等。 激光测长 精密测量长度是精密机械制造工业和光学加工工业的关键技术之一。现代长度计量多是利用光波的干涉现象来进行的,其精度主要取决于光的单色性的好坏。激光是最理想的光源,它比以往最好的单色光源(氪-86灯)还纯10万倍。因此激光测长的量程大、精度高。 激光测距 它的原理与无线电雷达相同,将激光对准目标发射出去后,测量它的往返时间,再乘以光速即得到往返距离。由于激光具有高方向性、高单色性和高功率等优点,这些对于测远距离、判定目标方位、提高接收系统的信噪比、保证测量精度等都是很关键的,因此激光测距仪日益受到重视。在激光测距仪基础上发展起来的激光雷达不仅能测距,而且还可以测目标方位、运运速度和加速度等,已成功地用于人造卫星的测距和跟踪。 激光测振 它基于多普勒原理测量物体的振动速度。多普勒原理是指:若波源或接收波的观察者相对 简易风洞及控制系统(G题) 摘要:本帆板控制系统由单片机ATMEGA328作为帆板转角的检测和控制核心,实现按键对风扇转速的控制、调节风力的大小、改变帆板转角θ、液晶显示等功能。引导方式采用角度传感器感知与帆板受风力大小的转角θ的导引线。通过PWM波控制电机风扇风力的大小使其改变帆板摆动的角度θ。风扇控制核心采用L298电机驱动模块,用ATMEGA328单片机为控制核心,产生占空比受数字PID 算法控制的PWM脉冲,实现对直流电机转速的控制,同时利用光电传感器将电机速度转化成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。MMA7455三轴加速传感器把角度输出信号传送给ATMEGA328单片机进行处理。 关键词:ATMEGA328,MMA7455,PWM波,PID算法 目录 1. 系统设计 1.1 任务与要求 1.1.1 主要任务 1.1.2 基本要求 1.1.3 说明 1.2总体设计方案 1.2.1 设计思路· 1.2.2 方案论证与比较 1.2.3 系统的组成 2. 单元电路设计 2.1 风速控制电路 2.2小球测距原理 2.3控制算法 3. 软件设计 3.1风速控制电路设计计算 3.2控制算法设计与实现 3.3程序流程图 4. 系统测试 4.1 调试使用的仪器与方法 4.2 测试数据完整性 4.3 测试结果分析 4.4 结束语 5. 总结 参考文献 附录1 元器件明细表 附录2 电路图图纸 附录3 程序清单 1.1任务与要求 1.1.1 主要任务 设计制作一简易风洞及其控制系统。风洞由圆管、 连接部与直流风机构成,如图所示。 圆管竖直放置,长度约40cm,内径大于4cm且内 壁平滑,小球(直径4cm黄色乒乓球)可在其中上下运 动;管体外壁应有A、B、C、D等长标志线,BC段有 1cm间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部应有防止小球落入连接部的格栅。控制系统通过调节风机的转速,实现小球在风洞中的位置控制。 1.1.2 基本要求 (1)小球置于圆管底部,启动后5s内控制小球向上到达BC段,并维持5s 以上。 (2)当小球维持在BC段时,用长形纸板(宽度为风机直径的三分之一)遮挡风机的进风口,小球继续维持在BC段。 (3)以C点的坐标为0cm、B点的坐标为10cm;用键盘设定小球的高度位置(单位:cm),启动后使小球稳定地处于指定的高度3s以上,上下波 动不超过±1cm。 (4)以适当的方式实时显示小球的高度位置及小球维持状态的计时。(5)小球置于圆管底部,启动后5s内控制小球向上到达圆管顶部处A端,且不跳离,维持5s以上。 (6)小球置于圆管底部,启动后30s内控制小球完成如下运动:向上到达AB段并维持3~5s,再向下到达CD段并维持3~5s;再向上到达AB段 并维持3~5s,再向下到达CD段并维持3~5s;再向上冲出圆管(可以 液压阀孔的加工技术 李树民 文正民 马兆俊 摘 要 阐述了液压阀孔加工技术的重要性,阀孔加工工艺方案的确定,并通过典型刀具的应用,分析了各种工艺方案的实用情况与推广。 关键词 阀孔加工技术 加工工艺方案 典型刀具 1 引 言 孔加工技术是金属切削加工的一个重要环节, 精密深孔加工就更是重中之重。随着高新技术的发展液压控制技术占的比重越来越大,传统笨重机械被液压机械逐步取代,而这个取代的过程很大程度上取决于液压件关键部位的加工技术,液压阀孔的加工精度直接影响产品的性能、寿命及使用。因此,加紧探寻新颖的阀孔加工方法,并对已用于生产中一些方法分析、研究,做到自觉准确地推广应用,从而使阀孔加工更趋于合理化。 如图1为我厂某一整体多路阀阀体内孔简图图1 多路阀阀体内孔简图 阀体材质为HT300高强度灰铸铁,抗拉强度为300N/cm 2,抗压强度为540N/cm 2。阀孔与阀体精密配合,配合间隙在 0.005~0.015mm 之间,阀的工作压力达21~ 35MPa ,阀孔直径D1一般在<10~<41mm 范围内, 阀体长度70~300mm 之间,长径比最大11∶1,阀孔尺寸精度H6~H7,圆柱要求0.003~0.005mm ,表面粗糙度Ra0.2。阀孔的尺寸精度、几何精度、表面粗糙度是影响产品质量的主要因素,如何保证产品精度要求,掌握合理的加工手段是非常必要的。2 加工工艺方案: 合理的工艺方案是根据生产纲领、精度要求、毛坯状况、工件材质、长径比、设备条件、工具制造能力和供应状况等相关因素制定出来的。目前,国内液压阀孔加工有下列几种方案: A.钻—扩—镗—铰—推—研 B.钻—扩—镗—铰—研 C.钻—镗—镗—铰—研(珩) D.扩—镗—镗—铰—研(珩) E.钻—刚性镗铰—研(珩) F.钻—刚性镗铰—金刚石铰 G.扩—刚性镗铰—金刚石铰 H.钻—扩—铰—珩—金刚石铰 I.钻—扩—镗—铰—刚性镗铰—金刚石铰 J.扩—镗—镗—铰—金刚石铰 对于各种不同规格的阀孔加工,在确定方案之前,首先要综合分析各个影响因素,然后采用一个比较合理的工艺路线。我厂通常采用的工艺方案是D 、G 、J ,上述三种方案都有各自的加工特点及适用 范围,下面逐一分析它们的使用情况。2.1 扩—镗—镗—铰—研(立珩) 这种加工方案适用范围较广,也是我厂传统使用的加工路线,尤其适用于较大规格的毛坯,阀孔大于<30mm 的阀体加工采用这种加工方案。 扩—镗—镗—铰 通常在普通六角车床或加工中心一次完成,扩孔去除余量大,使用双刃扩钻起到找直阀孔的作用,粗、精镗由于加工余量越来越小,起着进一步提高光洁度及直线度的作用,铰孔主要起定尺寸作用。通过上述工序加工,孔的尺寸精度可达到0.02mm 以上,几何精度达到0.003~0.005mm ,表面光洁度达到Ra0.8~0.4,这样为最后珩磨 奠定了较好的基础,珩磨后的孔精度能完全达到产品要求。 表1 切削参数及加工余量的选择 工序内容 主轴转速r/m 走刀量mm/r 切削深度mm 切削余量mm 扩5000.2424粗镗5000.24 1.25 1.25精镗5000.10.75 1.5铰2000.20.15 0.3 珩磨 80 10 0.01~0.0130.02~0.04 2.2 扩—刚性镗铰—刚性镗铰—金刚石铰 上述工艺属于我厂成熟工艺,阀孔经扩孔后采用刚性镗铰工艺半精加工,然后用金刚石铰刀珩磨。其基本特点是适用与长径比大的孔,尤其适合分片式多路阀阀孔的加工,稳定性较好,并且刚性镗铰刀前后带导向保证了工件的直线度要求,再加上内冷却排屑,大大改善了加工条件,保证了表面光洁度要 第6期(总第90期)2001年12月 液 压 气 动 与 密 封Hyd.Pneum.&Seals No.6(Serial No.90) Dec.,2001 液压系统安装工艺要求 1使用范围: 适用于特种设备液压系统安装 2作业条件: 本作业应在晴好的天气情况下进行,风力大于5级、雷、雨、雪、雾等恶劣天气时,严禁作业。 3使用工器具: 4作业人员 作业人员2人一组,配合作业。经专业培训并考试合格。作业人员应有岗位合格证。 5安全注意事项及危险控制措施: 5.1安全注意事项 5.1.1在清洗接头件时,应将汽油远离火源,并在清洗过程中严禁吸 烟。 5.2危险点控制措施 6作业步骤及要求: 液压元件组成:各液压元件之间由管道、接头和集成阀块等零部件有机地连接成一个完整的液压系统。因此,液压管道安装是否正确、牢固、可靠和整齐,将对液压系统工作性能有着重要的影响。 6.1液压管道安装要求 6.1.1管道安装质量的好坏是关系到液压系统工作性能是否正常的关键之一,管路上应尽量按使用说明书的图纸连接。并合理的配置管夹及支架。 a 安装时对已经酸洗过的管子还要用气吹净。 b安装时对管子接头、法兰件都要进行质量检查,发现有缺陷的接头或法兰件不准使用,应更换,并用煤油清洗和用气吹净。 c安装时要精心检查密封件质量,不合要求的密封件不准使用。安装密封件时要注意唇口方向,并仔细安装,切勿划伤或破损密封件,更不能漏装。 d各管子接头连接要牢固,各结合面密封要严密,不准有外漏。 e压力油管安装必须牢固、可靠和稳定。 6.1.2高压软管安装要求 a检查软管质量。要查明软管通径和成套软管的规格尺寸是否符合安装要求;检查胶管内外径表面是否有脱胶、老化、破损等缺陷,有严重缺陷的不准使用。 b 按使用说明书的液压图进行安装。 6.1.3管接头安装要求 a按照使用说明书的液压图进行安装管接头。 b 检查管接头的质量,发现有缺陷(如端面加工不平)应更换。 c 接头用煤油清洗,并用气吹净。 液压控制阀的材料及工艺要求 液压阀中阀芯、阀套等精密零件一般选用45钢、40Cr、Cr12MoV、 12CrNi3A、18CrNiWA及GCr15等高级工具钢、高合金结构钢、优质钢及轴承钢等材料。要求材料具有良好的耐磨性、线胀系数和变形量小等优点。为了提高阀芯的耐磨性,必须使材料表面达到一定的硬度(一般要求硬度大于58HRC),因而,针对不同的材料可选用淬火、渗碳、渗氮等不同的热处理手段。 水压阀中阀芯的材料除了要求能达到较高的硬度外,还应有良好的耐淡水或海水腐蚀性能。虽然奥氏体不锈钢的耐腐蚀性能较好,但难以通过热处理提高材料的表面硬度。一般可选用2Cr13、1Cr17Ni2等马氏体不锈钢、0Cr17NiCu4Nb等沉淀硬化不锈钢或工程陶瓷作为水液压阀阀芯的材料,其中马氏体不锈钢只能用于淡水。0Cr17NiCu4Nb是一种高强度不锈钢,其抗腐蚀性能接近1Cr18Ni9Ti奥氏体不锈钢。该不锈钢加工时一般先进行固溶处理,在精密加工前进行沉淀强化处理(当时效温度在420°C,保温10h以上时,可获得最高硬度)。 水压阀中阀套的材料首先应具有良好的耐腐蚀、磨损性能。此外,阀套与阀芯材料的合理搭配也十分重要,应防止阀套与阀芯材料发生粘着磨损、腐蚀磨损等,以提高水压阀的寿命和工作可靠性。阀套一般可选用耐腐蚀性好的QA19-4青铜或高分子材料,其中高分子材料应具有强度高、耐磨性好、线胀系数小、吸水率低、加工性能好等特点。 油压阀中阀体的材料多为灰铸铁或孕育铸铁(HT20-40、HT30-54)。水压阀阀体的材料可选用2A50、2A14等锻铝,加工后对铝件表面进行阳极氧化处理。也可采用1Cr18Ni9Ti等奥氏体不锈钢材料。 阀类元件要求阀芯在阀体孔内移动灵活,工作可靠,泄露小且寿命长。通常各种滑阀的配合间隙一般为0.005~0.035mm,配合间隙公差为0.005~0.015mm。其圆度和圆柱度的公差一般为0.002~0.008mm。对于台阶式阀芯和阀孔,各圆柱面的同轴度公差为0.005~0.01mm。对于平板阀,其阀芯与阀座的平面度误差应不大于0.0003mm。 阀芯与阀孔的配合表面一般要求表面粗糙度Ra值为0.1~0.2μm。考虑到孔的加工比外圆困难,一般规定阀芯外圆的表面粗糙度Ra值为0.1μm,阀孔内圆表面的Ra值为0.2μm。 可见,对阀芯和阀孔的形状精度、位置精度及其表面粗糙度都有较严格的要求,必须采用合适的加工工艺才能满足规定要求。 一、阀芯的加工 下面以圆柱滑阀阀芯为例介绍阀芯的加工工艺。 阀芯一般采用棒料作为毛坯,经正火后加工,其工艺过程为:切端面钻中心孔,粗车和精车外圆、端面和沉割槽内孔等,钻削、铣削,热处理,修磨中心孔,磨削外圆,外圆光整加工。 1粗加工 阀芯外圆和长度应留有足够的加工余量。粗加工后零件应进行调质处理,使其硬度在25~30HRC之间。 2 半精加工 液压控制阀的分类及作用 液压控制阀是液压系统中控制油液方向、压力和流量的元件。借助于这些阀,便能对执行元件的启动、停止、方向、速度、动作顺序和克服负载的能力进行控制与调节,使各类液压机械都能按要求协调地进行工作。 液压阀的分类 A【按用途分】 液压阀可分为方向控制阀(如单向阀和换向阀)、压力控制阀(如溢流阀、减压阀和顺序阀等)和流量控制阀(如节流阀和调速阀等)。这三类阀还可根据需要相互组合成为组合阀,如单向川页序阀、单向节流阀、电磁溢流阀等,使得其结构紧凑,连接简单,并提高了效率。 B【按工作原理分】 液压阀可分为开关阀(或通断阀)、伺服阀、比例阀和逻辑阀。开关阀调定后只能在调定状态下工作,本章将重点介绍这一使用最为普遍的阀类。伺服阀和比例阀能根据输入信号连续地或按比例的控制系统的数据。逻辑阀则按预先编制的逻辑程序控制执行元件的动作。 C【按安装连接形式分】 按安装连接形式,液压阀可分为: (1)螺丝式(管式)安装连接。阀的油口用螺丝管接头和管道及其他元件连接,并由此固定在管路上。这种方式适用于简单液压系统。 (2)螺旋式安装连接。阀的各油口均布置在同一安装面上,并用螺丝固定在与阀有对应油口的连接板上,再用管接头和管道与其他元件连接;或者把这几个阀用螺丝固定在一个集成块 的不同侧面上,在集成块上打孔,沟通各阀组成回路。由于拆卸阀时无需拆卸与之相连的其他元件,故这种安装连接方式应用较广。 (3)叠加式安装连接。阀的上下面为连接结合面,各油口分别在这两个面上,且同规格阀的油口连接尺寸相同。每个阀除其自身的功能外,还起油路通道的作用,阀相互叠装便成回路,无需管道连接,故结构紧凑,阻力损失很小。 (4)法兰式安装连接。和螺丝式连接相似,只是法兰式代替螺丝管接头。用于通径!32_ 食品安全快速检测技术汇总 快速检测技术广泛用于食品安全快速检测,临床检验、检验检疫、毒品检验等公共领域。食品安全快速检测是指对食品利用便携式分析仪器及配套试剂快速得到检测结果的一种检测方式。 食品安全问题主要有害污染物 1.农药、化肥:有机磷,有机氯,硝酸盐 2.兽药:兴奋剂,镇静剂,抗生素 3.重金属离子:镉,铅,汞,铬,砷,钼 4.生物毒素:黄曲霉毒素,呕吐毒素,肉毒素 5.致病菌:大肠杆菌,沙门氏菌,葡萄球菌等 快速检测含义 包括样品制备在内,能够在短时间内出据检测结果的行为称之为快速检测。三方面体现: (1)实验准备要简化 (2)样品经简单前处理后即可测试,后采用先进快速的样品处理方式 (3)分析方法简单,快速,准确 食品安全快速检测分类 按分析地点: 现场快速检测,实验室快速检测 按定性定量: 定性快速筛选检验,半定量检验,全量检验 农药残留检测方法 (一)生物法 1.生物化学测定法(酶抑制率法,速测卡法) 2.分子生物学方法(如:ELISA) 3.活体生物测定法(发光细菌,大型水藻,家蝇) 4.生物传感器法 生物传感器在食品分析中的应用: (1)食品成分分析 (2)食品添加剂的分析 (3)农药和抗生素残留量分析 (4)微生物和生物毒素的检验 (5)食品限度的检验 (二)化学方法酶抑制法酶联免疫检测法 蔬菜中硝酸盐含量的快速测定 将NO3-还原N02-后,芳香胺与亚硝酸根离子发生重氮化反应,生成重氮盐,重氮盐再与芳香族化合物发生偶联反应,生成一种红颜色偶氮化合物(偶氮染料),其颜色强度与硝酸盐含量呈正比,通过试纸由无色变为红色,变色的试纸放入基于光学传感器原理的硝酸盐检测仪中比色测定硝酸盐含量。仪器与材料:硝酸盐试纸. 快速测定仪 硝酸盐速测管 适用范围:乳品、饮用水、蔬菜等食物中硝酸盐的快速检测。 方法原理:按照国标GB/T5009. 33盐酸蔡乙二胺显色原理,在格林试剂中加入硝酸盐转化剂,并将其做成速测管,速测管中的试剂可将N03-还原为N02-后,再与芳香胺(氨基苯磺酸) 发生重氮反应,生成重氮盐,重氮盐再与芳香族化合物( A-祭胺)发生偶联反应,生成红色偶氮化合物(又叫偶氮染料),颜色深浅与硝酸盐含量成正比,与标准色卡比对,确定硝酸盐含量. 兽药残留快速检测微生物法检测 检测管中的培养基预先接种了嗜热脂肪芽孢杆菌,并含有细菌生长所需的营养以及pH指示剂。只需加入100ul样品于检测管中。 将含有样品的检测管放入64±1℃水浴中加热一段时间。奶或奶制品在培养基中迅速扩散,若该样品中不含有抗生素(或者抗生素低于检测值),嗜热脂肪芽孢杆菌将在培养基中生长,葡萄糖呗分解后所产生的酸会改变Ph指示剂颜色,由紫色变为黄色。相反若高于检测限的抑菌剂,则嗜热脂肪芽孢杆菌不会生长,指示剂颜色不变仍为紫色。 黄色表明该样品没有抗生素残留或抗生素残留的含量低于试剂盒的检测限(阴性) 紫色表明该样品中含有抗生素残留且浓度高于试剂盒的检测限(阳性) 如果介于黄色紫色之间,则说明该样品可能不含抗生素残留或者抗生素残留的含量低于试剂盒的检测限(部分阳性) 免疫金标记技术 激光测速与雷达测速的原理与比较 多谱勒效应和雷达测速 你一定有这样的经验,当你站在马路旁边,即使没有去注视路面上车辆的行驶的情况,单凭耳朵的听觉判断,你能感到一辆汽车正在驶过来,或者离你而去. 这里面当然依靠汽车行驶的声音是渐强还是渐弱,但细细想想,主要还是根据汽车行驶的车轮声或喇叭声调的变化. 原来,车辆驶近时,声音要变尖,也就是说,音调要高些;开过以后,远离的时候,声音会越来越低. 为什么会这样呢?原来,声音的形成,首先是由于发声体的振动,然后在它周围的空气中形成了一会疏一会密的声波,传到耳朵里,使耳膜随着它同样地振动起来,人们就听到了声音. 耳膜每秒钟振动的次数多,人就感到音调高;反之,耳膜每秒钟振动的次数少,人就感到音调低. 照这样说,声源发出什么声,我们听到的就是什么调. 问题的关键在于汽车在怎样的运动. 汽车匀速驶来,轮胎与地面摩擦产生的声波传来时“疏”、“密”、“疏”、“密”是按一定规律,一定距离排列的,可当汽车向你开来时,它把空气中声波的“疏”和“密”压得更紧了,“疏”、“密”的距离更近了,人们听到的音调也就高了. 反之,当汽车离你远去时,它把空气中的疏密拉开了,听到的声音频率就小了,音调也就低了. 汽车的速度越大,音调的变化也越大. 在科学上,我们把这种听到音调与发声体音调不同的现象,称为“多谱勒效应”. 有趣的是,雷达测速计也正是根据多谱勒效应的原理研制出来的. 我们知道,小汽车可以开得很快,可是为了保证安全,在某些路段上,交通警察要对车速进行限制. 那么,在汽车快速行进时,交通警察是怎样知道它们行驶的速度呢?最常用的测速仪器叫雷达测速计,它的外形很像一支大型信号枪,它也有枪筒,手柄、板机等部件,在枪的后面有一排数码管. 把枪口对准行驶的车辆,一扣板机,一束微波就射向行驶中的车辆. 微波是波长很短的无线电波,微波的方向性很好,速度等于光速. 微波遇到车辆立即被反射回来,再被雷达测速计接收. 这样一来一回,不过几十万分之一秒的时间,数码管上就会显示出所测车辆的车速. 它所依据的原理依然是“多谱勒效应”. 雷达测速计发出一个频率为1000 MHz的脉冲微波,如果微波射在静止不动的车辆上,被反射回来,它的反射波频率不会改变,仍然是1000 MHz. 反之,如果车辆在行驶,而且速度大,那么,根据多谱勒效应,反射波频率与发射波的频率就不相同. 通过对这种微波频率微细变化的精确测定,求出频率的差异,通过电脑就可以换算出汽车的速度了. 当然,这一切都是自动进行的. 雷达测速计的测速范围大约在每小时24 km到199 km之间,测速范围比较大,精确度也相当高,车速在每小时100 km/h,误差不会超过1 km/h. 测速雷达朝向公路,可以测量车速,如果指向天空,就可以测云层的高度,测云层的速度. 当然,要测几十千米外,甚至上百千米外的飞机,也是这个原理,只不过要向它扫描的空间连续发射微波束,这些微波束遇到飞机再反射回来,已经极其微弱了,要想把它接收到,分辨清并计算出来,就很困难了,这就需要一个庞大的灵敏的雷达. 雷达测速与激光测速的比较 PID控制在风洞风速调节中的应用 陈树权 (哈尔滨150001) 摘要为了完成某研究所风洞的风速控制系统,设计了一套以计算机为中心基于PLC的风速控制系统,给出了系统的硬件设计和软件设计,在提出PI控制方案的基础上,介绍了PID 控制的原理和特点,对风速控制精度及PID参数整定进行了研究。经实际运行验证了在风洞交流电机变频调速系统中PID控制的可靠性和实用性。 关键词PID控制交流电机变频调速 引言 风洞是空气动力学试验系统的必要设备。它依据运动的相对性原理,将飞行器的模型或实物固定在风洞中,通过风洞气流流过,以此模拟飞行器空中各种复杂的飞行状态,获取实验数据。风洞是研制飞机必需的一种试验装置。它模拟飞机飞行中各种气动力条件,以便获取飞机在空中飞行时的各种参数。 气流的改变是通过调节风洞系统中的电机转数调节风速实现的,风速采用安川G7系列变频控制器,并配以编码器反馈完成高精度控制,通过可编程逻辑控制器(PLC)实现PID 控制,使用具有触摸操作和通信功能的人机界面。PID控制是闭环控制系统中比例一积分一微分控制算法,它可以看作是这三项之和,根据设定值与被控对象实际值的差值,按PID方式汁算出控制输出量,使反馈跟随设定值变化,因此PID控制是负反馈闭环控制其中比例项是增益(Kc)与偏差的乘积,积分项与偏差的和成正比,微分项与偏差的变化成正比,而可编程控制器(PIC)是利用其闭环控制模块来实现PID控制。 1 PID控制介绍 1.1 PID控制的原理和特点 在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID 控制,又称PID调节PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时。系统控制器的结构和参数必须依靠经验和现场调试来确定时,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。本系统中只采用比例和积分控制。1.1.1 比例(P)控制 比例控制是一种最简单的控制方式。其控制器的输出与输人误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差(Steady—stateerror)。 1.1.2 积分(I)控制 在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进人稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System withSteady—stateError)。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。1.1.3 微分(D)控制 在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大 液压阀块设计规范1.阀块体的外形一般为矩形六面体。 2.阀块体材料宜采用35钢锻件或连铸坯件。 3.阀块体的最大边长宜不大于600mm,所包含的二通插装阀插件数量宜不大于8。 4.当液压回路所含的插件多于8个时,应分解成数个阀块体,各阀块体之间用螺栓相互连接,结合面处的连接孔道用O型密封圈予以密封,组成整体的阀块组。连接螺栓的矩形性能应不低于12.9级。 5.设计阀块体的主级孔道时应考虑尽可能减小流阻损失及加工方便。 6.主级孔道的直径按公式(1)估算选取: 式中: D -孔道直径,mm; Q -孔道内可能流过的最大工作流量,L/min; vmax -孔道允许的最大工作液流速,m/s。 一般,对于压力孔道,vmax不大于6m/s;对于回油孔道,vmax不大于3m/s。(一般取压力孔道不超过8m/s,回油孔道不超过4 m/s) 按公式(1)估算出的孔道直径应园整至标准的通径值。 7.当主级孔道与多个插件贯通时,为减小贯通处的局部流阻损失,宜采用与插件孔偏贯通的方法(使主级孔道的中心线与插件孔的中心线偏移)。一般使主级孔道中心线与插件孔孔壁相切。同时也可以加大孔道通径,加大的通径应不超过GB2877的规定。 8.为改善深孔工艺性,设计时可考虑增大孔径或采用两端钻孔对接的方法。(为避免钻头损坏,通常钻孔深度不易超过孔径的25倍) 9.设计时应尽量避免在阀块体内设置复杂连接的控制孔道和三维斜孔,应充分利用控制盖板内的控制孔道,或采用先导控制块等专用的控制孔道连接体。先导孔道的直径应与GB2877的规定一致。若因工艺需要而减小先导孔道的直径时,应作验算,确认不至影响对主级阀的控制要求。 10. 应避免采用倾斜孔道。必须倾斜时,孔道的倾斜角度应不超过35°,并须保证孔口的密封良好。对主级斜孔,应在有关视图上标注出因斜孔加工而造成的椭园孔口的长轴尺寸。 11. 当较小孔道孔径不大于25mm时,两相邻孔道孔壁之间的距离应不小于5mm;较小孔道孔径大于25mm 时,两相邻孔道孔壁之间的距离应不小于10mm。 若较小孔径小于10mm时,孔壁间距离可以缩小到4mm(一般以该值为基准)。但在结构布局受限时,若孔内压力小于6.3MPa时,可以缩小到3mm。 也可按以下方式校核:(考虑到细长孔,钻孔时可能会偏,实际应在计算结果的基础上适当加大。) 孔间距计算公式:δ=P*d2*[σ] δ= (P*d)/(2*[σ])。([σ] =σb/n) 式中:P —最大工作压力,MPa ;[σ] —块体材料的许用应力,MPa ;σb —块体材料的抗拉强度,MPa ;n —安全系数。(取相邻两孔计算值的最大值) 12. 为避免污染物的沉积,对于相通的孔道,孔深一般应到与之相通的孔道的中心线为止。(这样加工孔道截面偏小,能损较大,钻尖建议到达孔对面壁上。) 13.主级孔道的外接油口一般采用法兰连接。对于通径为25mm以下的较小油口,也可采用螺纹连接。先导孔道的外接油口宜采用螺纹连接。 标准法兰。SAE J518法兰或Parker油口连接法兰采用. 液压阀的连接方式有五种。 螺纹连接 阀体油口上带螺纹的阀称为管式阀。将管式阀的油口用螺纹管接头与管道连接,并由此固定在管路上。这种连接方式适用于小流量的简单液压系统。 其优点是:连接方式简单,布局方便,系统中各阀间油路一目了然。其缺点是:元件分散布置,所占空间较大,管路交错,接头繁多,不便于装卸维修。 (2)法兰连接 它是通过阀体上的螺钉孔(每油口多为4个螺钉孔)与管件端部的法兰,用螺钉连接在一起。这种阀称为法兰连接式阀。适用于通径32mm以上的大流量液压系统。 其优缺点与螺纹连接相同。 (3)板式连接 阀的各油口均布置在同一安装平面上,并留有连接螺钉孔,这种阀称为板式阀,如电磁换向阀多为板式阀。将板式阀用螺钉固定在与阀有对应油口的平板式或阀块式连接体上。其优点是:更换元件方便,不影响管路,并且有可能将阀集中布置。 与板式阀相连的连接体有连接板和集成块两种形式。 ①连接板。将板式阀固定在连接板上面,阀间油路在板后用管接头与管子连接。 ②集成块。集成块是一个正六面连接体。将板式阀用螺钉固定在集成块的三个侧面上,有时在阀与集成块间还可以用垫板安装一个简单的阀,如单向阀、节流阀等。剩余的一个侧面则安装油管,连接执行元件。集成块的上、下面是块与块的接合面,在各集成块的结合面上同一坐标位置的垂直方向钻有公共通油孔:压力油孔P、回油孔T、泄漏油孔L以及安装螺栓孔,有时还有测压油路孔。在集成块内打孔,沟通各阀组成回路。每个集成块与装在其周围的阀类元件构成一个集成块组,每个集成块组就是一个典型回路。 这种集成方式的优点是:结构紧凑,占地面积小,便于装卸和维修,可把液压系统的设计简化为集成块组的选择,因而得到广泛应用。 但它也有设计工作量大,加工复杂,不能随意修改系统等缺点。 叠加式连接将各种液压阀的上下面都做成像板式阀底面那样的连接面,相同规格的各种液压阀的连接面中,油口位置、螺钉孔位置、连接尺寸都相同(按相同规格的换向阀的连接尺寸确定),这种阀称为叠加阀。按系统的要求,将相同规格的各种功能的叠加阀按一定次序叠加起来,即可组成叠加阀式液压装置。 叠加阀式液压装置的最下面一般为底板,底板上开有进油口P、回油口T及通往执行元件的油口A、B和压力表油口。一个叠加阀组一般控制一个执行元件。 若系统中有几个执行元件需要集中控制,可将几个垂直叠加阀组并排安放在多联底板上。用叠加阀组成的液压系统,元件间的连接不使用管子,也不使用其它形式的连接体,因而结构紧凑,体积小,系统的泄漏损失及压力损失较小,尤其是液压系统更改较方便、灵活。叠加阀为标准化元件,设计中仅需绘出叠加阀式液压系统原理图,即可进行组装,因而设计工作量小,应用广泛。 (5)插装式连接 安徽国防科技职业学院 毕业设计 题目: 液压阀工作原理与作用 姓名: 张涛 专业: 机械设计与制造 学号: 3108012016 班级: 08机械设计与制造(2)班 指导老师: 江本赤 完成日期: 2010年6月6日 摘要:换向型方向控制阀(简称换向阀),是通过改变气流通道而使气体流动方向发生变化,从而达到改变气动执行元件运动方向目的。它包括气压控制换向阀、电磁控制换向阀、机械控制换向阀、人力控制换向阀和时间控制换向阀等 一个完整的液压系统由五个部分组成 1.动力元件 2.执行元件 3.控制元件 关键词:增压器;压力偏置;差动;连续增压 液压阀的作用 液压阀是用来控制液压系统中油液的流动方向或调节其压力和流量的,因此它可分为方向阀,压力阀和流量阀三大类. 液压阀的作用 液压阀是用来控制液压系统中油液的流动方向或调节其压力和流量的,因此它可分为方向阀、压力阀和流量阀三大类。一个形状相同的阀,可以因为作用机制的不同,而具有不同的功能。压力阀和流量阀利用通 流截面的节流作用控制着系统的压力和流量,而方向阀则利用通流通道的更换控制着油液的流动方向。这就是说,尽管液压阀存在着各种各样不同的类型,它们之间还是保持着一些基本共同之点的。例如: (1)在结构上,所有的阀都有阀体、阀芯(转阀或滑阀)和驱使阀芯动作的元、部件(如弹簧、电磁铁)组成 (2)在工作原理上,所有阀的开口大小,阀进、出口间压差以及流过阀的流量之间的关系都符合孔口流量公式,仅是各种阀控制的参数各不相同而已。 二、对液压阀的基本要求 (1)动作灵敏,使用可靠,工作时冲击和振动小。 (2)油液流过的压力损失小。 (3)密封性能好。 (4)结构紧凑,安装、调整、使用、维护方便,通用性大。 三、液压阀的分类 液压阀可按不同的特征进行分类,如表5—1所示。2014年TI杯大学生电子设计竞赛赛题-G题风洞控制系统V4—专科
液压阀的选择
典型液压系统
激光传感器的工作原理及其应用
液压控制阀介绍——插装阀
激光传感器的工作原理及其应用
简易风洞及控制系统
液压阀孔的加工技术
液压系统安装工艺要求
液压控制阀的材料及工艺要求
液压控制阀的分类及作用
食品安全快速检测技术汇总
激光测速与雷达测速的原理比较
PID控制在风洞风速调节中的应用
液压阀块设计详细要求
液压阀的连接方式
液压阀工作原理与作用