机器人无线远程控制系统的人机接口_王晓亨

中图分类号:TP393 文献标识码:A 文章编号:1009-2552(2007)01-0001-03
机器人无线远程控制系统的人机接口
王晓亨,陆宇平
(南京航空航天大学自动化学院,南京210016)
摘 要:在无线局域网环境中,建立了一套以移动机器人为控制对象的、模拟Internet传输特征的远程控制技术研究平台。通过可视化的人机接口界面,可以直接向远端机器人发送控制指令,并能看到反馈的状态数据;还可通过手柄控制,语音控制、命令集可编程接口等方式控制机器人。最后的开发实例具有操作简便、界面友好、易于扩展等特点。
关键词:人机接口;Speec h API;机器人
Man-machine interface of robot wirless remote
distance control system
WANG Xiao-heng,LU Yu-ping
(College of Auto mation,Nanjing University of Aeronautics and Astronautics,Nanjing210016,C hina) Abstract:The research platform of remote distance control technology of simulating the characters of Internet communication is established in wireless local area network.The operators can directly send control instr uc-tions to the remote robot,and vie w the feedbacked state data through the visualized man-machine interface, also can control the r emote robot by handle c ontr ol,speech control,pr ogrammable command sets and so on.
The instance has some advantages such as convenient operation,friendly interface,adapted extension.
Key words:man-machine interface;Speech API;robot
0 引言
近年来,基于Internet的远程控制技术是一个研究热点,随着无线网络技术的发展和日益成熟,使得基于无线网络的远程控制技术的研究得到了极大的关注。
利用VC++设计了一套以移动机器人为复杂控制对象,在无线局域网环境下模拟广域网络的特征,用软件的方式人为再现不确定性时延,数据传输丢失等网络现象的远程技术研究平台。并利用该开发平台建立一套面向无线网的机器人远程控制系统。该平台通过可视化的人机接口界面可方便的进行操作和进一步的研究。
1 硬件环境
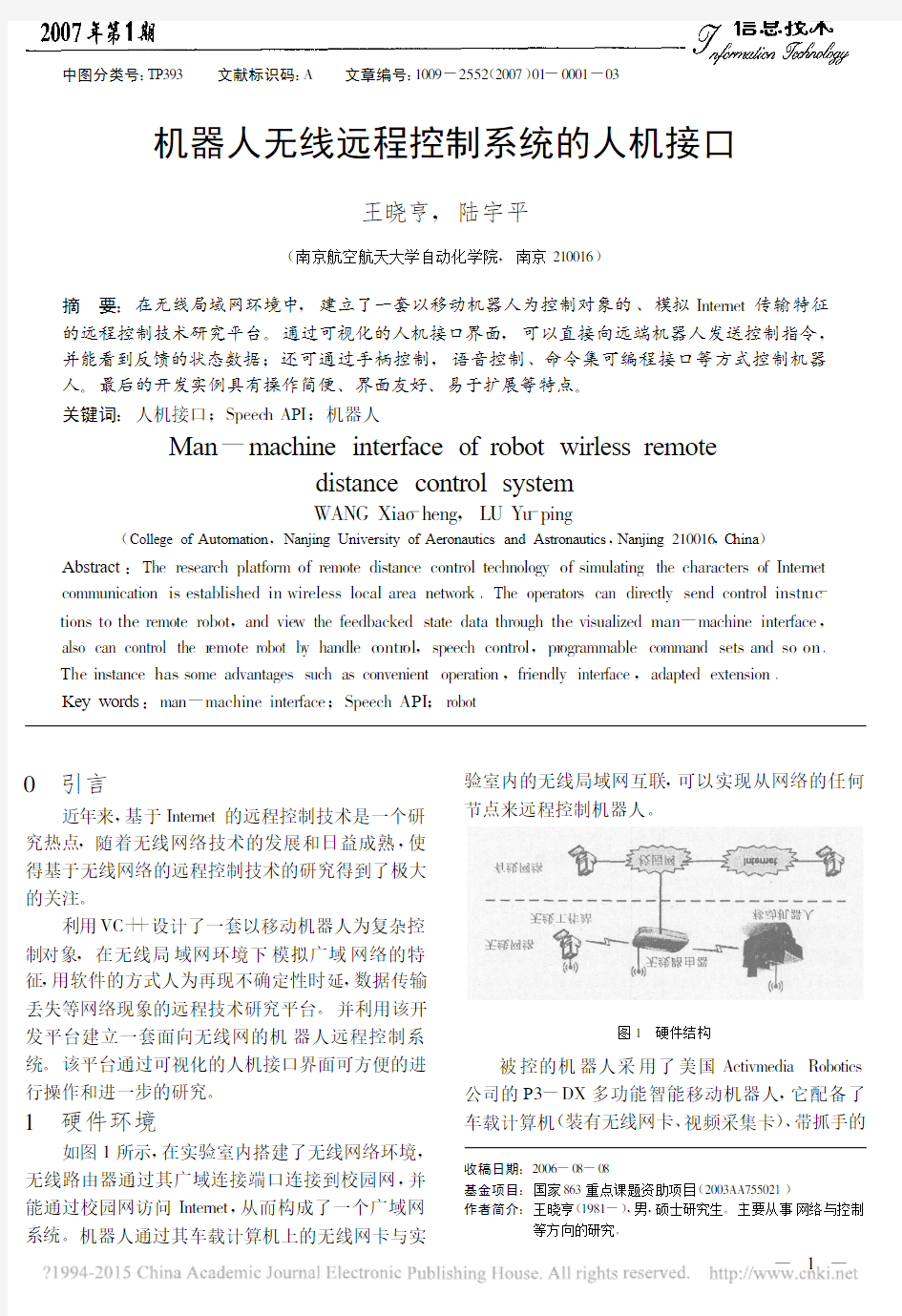
如图1所示,在实验室内搭建了无线网络环境,无线路由器通过其广域连接端口连接到校园网,并能通过校园网访问Internet,从而构成了一个广域网系统。机器人通过其车载计算机上的无线网卡与实验室内的无线局域网互联,可以实现从网络的任何节点来远程控制机器人
。
图1 硬件结构
被控的机器人采用了美国Activmedia Robotics 公司的P3-DX多功能智能移动机器人,它配备了车载计算机(装有无线网卡、视频采集卡)、带抓手的
收稿日期:2006-08-08
基金项目:国家863重点课题资助项目(2003AA755021)
作者简介:王晓亨(1981-),男,硕士研究生。主要从事网络与控制等方向的研究。
DOI:10.13274/https://www.360docs.net/doc/3214349460.html, ki.hdzj.2007.01.001
5自由度手臂、水平转动倾斜摄像头、4组共16个声纳。
2 人机接口的实现
机器人远程控制系统中的人机接口技术从本质上来讲就是通过什么样的方式来发送控制指令和进行状态数据的反馈。除了提供传统的图形化人机界面,还提出了一些新的人机接口技术,对人与移动机器人更自由灵活的合作进行了初步的探讨。
2.1 图形化人机界面
目前在机器人远程控制系统的开发中采用的最多也是最基本的方法即提供一个简单、易操作的图形化人机界面。该界面上提供各种控制按钮、控件,用户通过点击这些按钮发送命令给远端的机器人。接口界面要提供足够的信息使问题容易理解,同时尽可能地传输最少的数据,以及拥有简单的接口界面布局。同时还提供机器人状态数据的图像化显示。
对于本文的机器人无线远程控制系统,由于其是一个开发式的研究型环境,需要不断的扩展。系统的功能也将不断增加,复杂性也同时在增高。面对可能是对机器人控制没有经验的人员,在基于系统复杂性的前提下,如何使图形界面更具友好性就成为系统设计中重要的课题,它将影响用户的操作行为,甚至是系统的安全。在设计机器人无线远程控制系统的远程控制端的图形化接口界面时,将考虑以下原则:
(1)界面必须具有交互性和智能性。良好的接口设计大多有一个交互式处理机制。现有的网络远程机器人系统,如Xa vier的人机交互方式虽然简单易操作,但实现功能单一,没有充分体现机器人的自主性及与人的智能融合。要使用户能远程控制机器人并完成一系列复杂动作,就需要使用更先进的技术来实现复杂而且友好的用户界面,以提高其交互性。
(2)界面应简单、清晰、易理解和易操作。将机器人的动力学、异常性以及活动空间边界的复杂性对用户隐藏,同时,仍然允许灵活的操作封装。并且尽量滤掉各种非常复杂的因素。在不丢失任何有用功能的情况下,尽量简化对机器的控制。
(3)界面提供用户操作远程机器人的功能应尽可能详细和可靠。功能的完整与界面的简洁是一个比较矛盾的东西,如何较好的协调这两个要求是图形化界面设计的一个难点。
2.2 手柄控制
通过使用手柄来实现对机器人的远程控制突破了传统的使用鼠标点击图形界面的做法,有着比使用鼠标无法比拟的便捷和真实控制的感受。通过使用手柄,就像驾驶着汽车一样,实现对机器人的远程控制,便于用户连续的调整机器人的位姿和行动,并更具远程控制的真实感。
要在机器人远程控制系统中实现手柄的控制,需要对手柄的接口(串口、并口、USB等)进行编程,还有一个比较容易实现的方法就是使用工具软件JoyToKey来实现。JoyToKey可以实现将手柄上的按键和键盘上的按键相对应的功能,即按了手柄上的某个键相当于按了键盘上对应的一个或几个键。因此在软件编程时只需在代码中加入对键盘按键的响应就可实现手柄控制的功能。而键盘按键响应可以通过调用Win32API函数RegisterHotKey注册系统热键的方法实现。
2.3 移动式便携设备
为了实现远程控制端的移动性,可以采用便携式设备作为远程控制端的硬件平台。这些设备可以是安装了无线网卡的可编程的PDA,还可以是专门为机器人远程控制系统设计和开发的嵌入式设备。这些设备具备的基本特征就是需要有无线网络接入接口、支持Socket编程、显示屏、嵌入式操作系统(支持多线程)。只有具备了上述特征的设备才能实现具有移动性的远程控制平台的功能。
2.4 语音控制
机器人的语音控制就是远程用户通过输入自然语言命令来控制机器人的功能。目前语音控制技术在汽车电子、飞机控制系统、军事指挥系统、医疗系统已经有了一定的研究和应用。利用语音进行远程控制,有效的利用了人类的语言能力,解放了人类的手,充分的调动了手、耳、口等器官,使人机交互更为自然、有效、方便和分工明确。
语音控制的核心就是语音识别技术。语音识别以语音为研究对象,它是语音信号处理的一个重要研究方向,是模式识别的一个分支,涉及到生理学、心理学、语言学、计算机科学以及信号处理等诸多领域,其最终目标是实现人与机器进行自然语言通信。现在应用较为广泛的语音识别算法有动态时间规划、离散隐马尔可夫模型、连续隐马尔可夫模型、人工神经网等。
本文设计的机器人无线远程控制系统将采用微软公司推出的语音识别开发包Speech API(以下简写为SAPI)。SAPI提供了语音识别与语音合成的接口。图2是语音远程控制在系统中的结构图。该结构位于远程控制端,虚线框内的即为语音控制模块。
语音识别引擎首先装载语法规则(XML 格式的语音和实际命令的匹配表)。当用户输入语音命令时,引擎将根据语法规则识别出对应的字符指令然后发给指令发送模块进行发送,以下的流程和远程控制端的设计流程是一致的。因此语音控制模块相当于在远程控制端加上了一个语音控制指令的接口。对于利用SAPI 进行开发时具体步骤,可参考SAPI 帮助文档
。
图2 语音控制功能结构图
在进行语音控制时仍然有一些问题需要解决。一个是识别率不高的问题。对于本文设计的远程控制系统,由于指令属于短的词汇型,没有很长的句子,因此识别率相对很高。如果今后开发纯语言的控制方法时,现有的语音识别技术识别率还达不到设计的要求。因此语音识别的算法还有待继续研究和发展下去。另一方面,语音控制受到噪音环境的影响很大,如果周围噪音很大将会严重干扰识别的结果,因此消噪技术也是一个重要的研究方向。但是总的来说,语音控制技术作为一种人机接口是切实可行的,并有着良好的应用前景。2.5 命令集可编程接口
在远程控制端的图形化界面上提供可编程接口,使用户可自行规划命令集合,用以完成某项任务。可编程接口提供基本远程控制指令并规定了命令集的文件格式。用户通过图形化界面并可结合机器人模拟器离线进行命令集的编辑。
当要执行用户设计的命令集任务时,由远程控制端读取命令集文件,依次读取其中的指令以及参数并将其发送到现场控制端执行。这一可编程接口可以帮助进行系统的功能提升,特别是增加系统完成重复性任务的能力。它也使非专业用户也可简单编排机器人的运动,可应用于机器人娱乐与教学。
3 人机接口设计实例
利用开发库CyLib ,快速的开发出了一套面向无线网的机器人远程控制系统。图3所示的是远程控
制端软件的界面。该系统实现了机器人本体、机械臂和摄像头的控制、状态数据的显示、声纳罗盘数据图形化显示、以及视频监控等智能控制功能。图4为手柄控制接口界面,用于启动关闭手柄控制,提示手柄各个按键对应的控制命令等。图5为命令集控制界面。提供命令集的编辑、查看与执行等功能
。
图3
远程控制端界面
图4
手柄控制界面图5 命令集编辑及控制界面
在今后的功能扩展过程中,还可以继续在该界面上添加新的控制界面,比如各种智能控制任务的执行界面,也可以直接作为研究人员的试验平台。研究人员只需将自己的研究成果比如算法嵌入到里面,从而快速验证研究人员的理论成果。
(下转第19页)
拉电阻有效
#pragma set node sd string“@0.”
#include
#include
设定I O对象
int vswitch=1;
const unsigned long brightness L=280;
const unsigned long brightness H=64;
network input long nvievalue;
network input long nvigvalue;
long evalue;
network input sd string(“@01.”)SNVT obj request nvi00Request;
network output sd string(“@02.”)SNVT obj status nvo00Status;
声明triac对象I O4用于输出触发脉冲,I O
4用于输入过零检测脉冲,选用6号内部时钟,脉冲上升沿有效;
I O0output triac pulse sync(IO4)clock(6) clockedge(+)zeroin;
开关打开时triac对象开始运行
when(vswitch==1)
{io out(zeroin,evalue);}
接受上层来的NV值
when(nv update occurs(nvievalue))
{evalue=nvievalue;
io out(zeroin,evalue);}
网络变量的更新
when(nv update occurs(nvigvalue))
{if(nvigvalue>brightness H)
{evalue=320;
}else if(nvigvalue {evalue=1;} else evalue=nvigvalue2; io out(zeroin,evalue)} reset事件 when(reset){ io out(zeroin,327); } 把智能调光节点的应用程序装载到Mini E VK 的评估板中,通过I SI(Interoperable Self-installation)协议连接,然后该应用程序就可以利用输入输出网络变量(NV)的更新来与评估板交换数据,并进行测试。 3 结束语 本文选用LonWor ks技术平台中的Mini E VK工具开发智能调光节点,来实现根据现场光线自动调节灯泡的功能,这种智能调光节点比目前的远程主机控制调光更节约能源,节省人力。该智能调光节点可以应用在城市路灯控制、工厂、楼宇、家庭里[4],在建设节约型社会的今天,它必将得到广泛的应用。参考文献: [1] 阳宪惠.现场总线技术及其应用[M].北京:清华大学出版社, 1999. [2] 马莉.智能控制控制与Lon网络开发技术[M].北京:北京航空 航天大学出版社,2003. [3] 杨育红.Lon网络程序设计[M].西安:西安电子科技大学出版 社,2001. [4] 王际业,林锦国,等.基于LonWorks技术的远程灯光集中控制 系统[J].现代电子技术,2004(3):1-3. 责任编辑:么丽苹 (上接第3页) 4 结束语 面向无线网的机器人远程控制系统的设计与实现是一项系统工程,需要不断的改进和扩展,而使用远程技术研究平台,通过可视化的人机接口界面无疑是一个非常有效的提高研究效率的方法,同时也是一种趋势。 通过该可视化接口界面,操作者可以直接向远端的机器人发送控制指令,并能及时看到反馈的状态数据,掩盖了底层复杂的工作细节,操作简便,界面友好;还可通过手柄控制,语音控制等功能增加远程控制的真实感。该接口界面还可方便的进行扩展,用于网络环境下控制系统的稳定性理论;数据传输安全性;实时控制系统的网络通信协议;事件驱动方式的网络系统控制策略;分布式控制系统;无人飞行器、远程机器人的遥操作、实施规划及有效控制以及图形匹配,目标识别等众多研究方向。 参考文献: [1] Wilhel m T,B?hme H J,Gross H M.A mul ti-modal s ys tem for trac- king and anal yzing faces on a mobile robot[J].Robotics and Autono- mous systems,2004,48(1):31-40. [2] JoséMariano Gonzál ez R omano,Eduardo Fernández Camac ho,J uan Gómez Ortega,et al.A generic nat ural language interface for tas k planning-application to a mobile robot[J].Control Engineering Prac- tice,2000,8(10):1119-1133. [3] 徐志晖.基于无线网络的远程控制平台[D].硕士学位论文. 南京航空航天大学,2005. [4] 王卫华,陈卫东,顾岳.用M icros oft Speech SDK实现语音识别和 语音合成[J].电子技术,2000(11):40-41. [5] 李禹材,左友东,郑秀清,等.基于Speech SDK的语音控制应用 程序的设计与实现[J].计算机应用,2004,24(6):114-116. [6] Jeffrey Richter.Windows核心编程[M].王建华,等译.北京:机械 工业出版社,2000. [7] 黄超.Windo w s网络编程[M].北京:人民邮电出版社,2003. 责任编辑:张荣香 一种智能机器人系统设计和实现 我们从广泛意义上理解所谓的智能机器人,它给人的最深刻的印象是一个独特的进行自我控制的"活物".其实,这个自控"活物"的主要器官并没有像真正的人那样微妙而复杂。智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。我们称这种机器人为自控机器人,以便使它同前面谈到的机器人区分开来。它是控制论产生的结果,控制论主张这样的事实:生命和非生命有目的的行为在很多方面是一致的。正像一个智能机器人制造者所说的,机器人是一种系统的功能描述,这种系统过去只能从生命细胞生长的结果中得到,现在它们已经成了我们自己能够制造的东西了 嵌入式是一种专用的计算机系统,作为装置或设备的一部分。通常,嵌入式系统是一个控制程序存储在ROM中的嵌入式处理器控制板。事实上,所有带有数字接口的设备,如手表、微波炉、录像机、汽车等,都使用嵌入式系统,有些嵌入式系统还包含操作系统,但大多数嵌入式系统都是是由单个程序实现整个控制逻辑。嵌入式技术近年来得到了飞速的发展,但是嵌入式产业涉及的领域非常广泛,彼此之间的特点也相当明显。例如很多行业:手机、PDA、车载导航、工控、军工、多媒体终端、网关、数字电视…… 1 智能机器人系统机械平台的搭建 智能机器人需要有一个无轨道型的移动机构,以适应诸如平地、台阶、墙壁、楼梯、坡道等不同的地理环境。它们的功能可以借助轮子、履带、支脚、吸盘、气垫等移动机构来完成。在运动过程中要对移动机构进行实时控制,这种控制不仅要包括有位置控制,而且还要有力度控制、位置与力度混合控制、伸缩率控制等。智能机器人的思考要素是三个要素中的关键,也是人们要赋予机器人必备的要素。思考要素包括有判断、逻辑分析、理解等方面的智力活动。这些智力活动实质上是一个信息处理过程,而计算机则是完成这个处理过程的主要手段。 机器人前部为一四杆机构,使前轮能够在一定范围内调节其高度,主要功能是在机器人前部遇障碍时,前向连杆机构随车轮上抬,而遇到下凹障碍时前车轮先下降着地,以减小震动,提高整机平稳性。在主体的左右两侧,分别配置了平行四边形侧向被动适应机构,该平行四边形机构与主体之间通过铰链与其相连接,是小车行进的主要动力来源。利用两侧平行四边形可任意角度变形的特点,实现自适应各种障碍路面的效果。改变平行四边形机构的角度,可使左右两侧车轮充分与地面接触,使机器人的6个轮子受力尽量均匀,加强机器人对不同路面的适应能力,更加平稳地越过障碍,并且更好地保证整车的平衡性。主体机构主要起到支撑与连接机器人各个部分的作用,同时,整个机器人 本期教程专门介绍如何让我们的机器人与互联网相连,实现远程安防监控与控制!然后可以在全球范围内控制它。本教程使用的路由器为WR703N,DB120的路由外网控制设置。 一、基本原理 外网控制的基本原理就是“端口映射”+“动态域名”。什么叫端口映射呢?简单地说,就是在你家里的无线路由器上做一个设置,使得外网对于路由器上一个特定的端口的访问会被路由器重新转到一个指定的IP主机和端口,这样一来,家里的无线路由器就等于是一个“桥”,联通了外网和小车机器人上面的路由,使得我们可以在外网控制家里的机器人。 那么“动态域名”又是什么呢?大家可以想想:我们家里的路由器每次开机后,对外的IP 地址都是不同的,那么控制小车就需要每次通过查询路由对外的IP地址,然后重新设置控制端的IP,这是个很麻烦的事。“动态域名”就可以完美地解决这个问题,你先向动态域名提供商申请一个动态域名,这个域名是不变的,比如:https://www.360docs.net/doc/3214349460.html,,提供商会给你一个账号密码,把这个账号密码填入路由的动态域名功能里面,每次开机的时候,路由就会向域名提供商的服务器登录,服务器就可以获取本次登录时,路由对外网的地址,然后自动帮你把这个新IP绑定在https://www.360docs.net/doc/3214349460.html,这个域名上面,这样一来,我们就没必要每次都去找路由当前的IP了,直接输这个域名就可以连到我们的路由。 我们今天要做的也就是利用上面的原理完成外网到家里的无线路由器,再到机器人上面 的WIFI板这一过程。 二、外网映射设置 1、家庭路由器设置。 首先需要一个家用的路由器,可以上外网的,这个路由器就是作为沟通小车与外界的桥梁。在这里,我选用了我的TP-Link WR641G+路由器。 第一步:设置转发规则 如下图所示,登陆家庭路由器的192.168.1.1管理界面,找到转发规则——》虚拟服 务器 在这里,因为我们的WIFI机器人运行需要开两个端口,端口8080为视频端口,端口2001为控制端口,所以我们添加两个端口转发规则,这边我使用192.168.1.108作为转发的目标客户端,这就是我们的WIFI板IP地址。这个IP可以自己定的,但是必须为固定的。并 且在家庭路由器的DHCP范围内。 通过这个设置,来自外网的对8080端口和2001端口的访问将重新发送到 192.168.1.108这个IP的客户端上,也就是我们的WIFI板。 1.从人体解剖学分析机器人的人机交互及控制系统 ?目标:人体解剖学(神经系统)构件→结合机器人技术构件→机器人控制系统架构构件→人机交互界面的系统架构(硬件领域) 1.1.神经系统(nervous system) 神经细胞(神经元)是神经系统的响应细胞,神经系统通过电化学信号来处理和传送信息。运动神经细胞能接收从大脑和骨髓神经传来的信号,并控制肌肉的收缩。i 1.1.1.神经系统的分布 神经系统分为中枢部和周围部。 中枢部即中枢神经系统(CNS,central nervous system),包括脑和脊髓,它们分别位于颅腔和椎管内。 周围部又称周围神经系统(PNS,peripheral nervous system),包括脑神经、脊神经和内脏神经,周围神经一端同脑或脊髓相连,另一端通过各种末梢装置与神奇其他各器官、系统相联系。 根据分布对象的不同,将周围神经系统分为躯体神经和内脏神经。躯体神经分布于体表、骨骼肌、骨和关节;内脏神经分布于内脏、心血管、平滑肌和腺体。躯体神经和内脏神经在大脑皮质统一管辖与协调下,完成神经系统的各种功能。 1.1. 2.神经元的分类 神经系统的基本组织是神经组织(nervous tissue),神经组织主要由神经元和神经胶质做成。神经元(neuron)又称神经细胞(nerve cell),具有感受刺激和传导神经冲动的功能。神经胶质(neuroglia)又称神经胶质细胞(neuroglial cell),简称胶质细胞(glia或glia cell),无传导神经冲动的功能,而对神经元起支持、保护、分隔和营养等作用。 神经元基于功能及神经兴奋传导冲动方向分类如下: 感觉神经元(sensory neuron):又称传入神经元(afferent neuron),感受机器内、外环 安川机器人远程控制总结 一、m aster程序 1、master程序的设置 单击【主菜单】—>选择屏幕上的【程序内容】—>【新建程序】,如图1-1。 图1-1 单击【选择】显示如图1-2所示的界面,单击【选择】,输入程序名,单击软键盘【ENTER】,显示如图1-3所示的界面,单击【执行】,此处程序名为“MASTER”,程序创建完毕。 图1-2 图1-3 单击【主菜单】—>选择屏幕上的【程序内容】—>【主程序】,如图1-4。 图1-4 单击【选择】,显示如图1-5所示的设置主程序界面。 图1-5 单击【选择】,出现如图1-6所示的界面,单击【向下】选择“设置主程序”。 图1-6 显示如图1-7所示的界面,单击【向下】选择“MASTER”单击【选择】。 如图1-7 主程序设置完毕。 2、MASTER程序的编辑 单击【主菜单】—>选择【程序内容】—>【选择程序】—>【选择】,出现如图1-7所示的界面,单击【向下】,选择“MSATER”,单击【选择】。在如图2-1所示的界面下编辑主程序。 图2-1 此处以2个工位,每个工位3种工件的工作站为例创建主程序内容,需要熟悉机器人示教器的基本操作(如【命令一览】【插入】【回车】【选择】)。 插入DOUT OT#(1) OFF程序举例: 光标定位在左侧行号处,如图2-2,如图单击【命令一览】,选择【I/O】,单击【选择】,选择【DOUT】,如图2-3所示的界面 图2-2 图2-3 单击【选择】,显示如图2-4所示的界面,光标定位在“DOUT”上,单击【选择】,显示如图2-5所示的界面,光标定位到“数据”行的ON,单击【选择】,切换成“OFF”,单击两次【回车】则可出入该指令。需要指出的是在光标定位处插入指令是向下插入。 一:测试软件准备 我们测试过程中需要用到一个软件tcping.exe和tcping64.exe,将该文件放到C盘Windows->System32文件夹下,打开运行,输入cmd,和正常使用ping命令一样,输入 tcping 192.168.1.1(ip地址) 80(端口号), Port is open就是正常。 二:设置流程 1:找工程部确认有一根网线可以直接从快思聪主机连到电信进户的网关。 2:确认客户上网方式是以下哪一种: ftth。无法用花生壳,但可用快思聪; adsl,可以用花生壳,快思聪无效。 在客户那里会碰到两类悦ME网关(中兴F450G和上海贝尔的E-140-P),里面设置基本类似 第二个网口是IPTV,切记不能使用。 3:我们要设置3个设备:中兴网关,快思聪主机,iPhone手机(安卓不行)然后根据FTTH或ADSL选择是使用快思聪还是花生壳账户,其实两个都填写,也不会冲突。 设置一:中兴网关 中兴网关IP是192.168.1.1,快思聪主机一定要在1网段。 (1):首先我们需要一个超级账号,这个才有全部修改权限,问工程部要来客户3个资料:住址、电信宽带登记的身份证号码、姓名。 (2):打10000询问,进入后按提示语音一个个按1,1,0,3,申请维护人员上门,然后10000会发短信告诉维护人员的电话,你打维护人员电话获取管理员账号和密码,账号一般是telecomadmin。 (3):拿超级账号登录中兴网关,IE浏览器输入192.168.1.1登录到你的中兴网关,输入用户名和密码,然后就可以看到下图 设置二:快思聪主机 下面红框内,出现successfully这句话,表示已经和外网建立连接。 2017-10-08 GaryLiu 于四川绵阳 无人机的飞行控制是无人机研究领域主要问题之一。在飞行过程中会受到各种干扰,如传感器的噪音与漂移、强风与乱气流、载重量变化及倾角过大引起的模型变动等等。这些都会严重影响飞行器的飞行品质,因此无人机的控制技术便显得尤为重要。传统的控制方法主要集中于姿态和高度的控制,除此之外还有一些用来控制速度、位置、航向、3D轨迹跟踪控制。多旋翼无人机的控制方法可以总结为以下三个主要的方面。 1.线性飞行控制方法 常规的飞行器控制方法以及早期的对飞行器控制的尝试都是建立在线性飞行控制理论上的,这其中就有诸如PID、H∞、LQR以及增益调度法。 1)PID PID控制属于传统控制方法,是目前最成功、用的最广泛的控制方法之一。其控制方法简单,无需前期建模工作,参数物理意义明确,适用于飞行精度要求不高的控制。 2)H∞ H∞属于鲁棒控制的方法。经典的控制理论并不要求被控对象的精确数学模型来解决多输入多输出非线性系统问题。现代控制理论可以定量地解决多输入多输出非线性系统问题,但完全依赖于描述被控对象的动态特性的数学模型。鲁棒控制可以很好解决因干扰等因素引起的建模误差问题,但它的计算量非常大,依赖于高性能的处理器,同时,由于是频域设计方法,调参也相对困难。 3)LQR LQR是被运用来控制无人机的比较成功的方法之一,其对象是能用状态空间表达式表示的线性系统,目标函数是状态变量或控制变量的二次函数的积分。而且Matlab软件的使用为LQR的控制方法提供了良好的仿真条件,更为工程实现提供了便利。 4)增益调度法 增益调度(Gain scheduling)即在系统运行时,调度变量的变化导致控制器的参数随着改变,根据调度变量使系统以不同的控制规律在不同的区域内运行,以解决系统非线性的问题。该算法由两大部分组成,第一部分主要完成事件驱动,实现参数调整。如果系统的运行情况改变,则可通过该部分来识别并切换模态;第二部分为误差驱动,其控制功能由选定的模态来实现。该控制方法在旋翼无人机的垂直起降、定点悬停及路径跟踪等控制上有着优异的性能。 2.基于学习的飞行控制方法 基于学习的飞行控制方法的特点就是无需了解飞行器的动力学模型,只要一些飞行试验和飞行数据。其中研究最热门的有模糊控制方法、基于人体学习的方法以及神经网络法。 1)模糊控制方法(Fuzzy logic) 模糊控制是解决模型不确定性的方法之一,在模型未知的情况下来实现对无人机的控制。 2)基于人体学习的方法(Human-based learning) 美国MIT的科研人员为了寻找能更好地控制小型无人飞行器的控制方法,从参加军事演习进行特技飞行的飞机中采集数据,分析飞行员对不同情况下飞机的操作,从而更好地理解无人机的输入序列和反馈机制。这种方法已经被运用到小型无人机的自主飞行中。 3)神经网络法(Neural networks) 中图分类号:TP393 文献标识码:A 文章编号:1009-2552(2007)01-0001-03 机器人无线远程控制系统的人机接口 王晓亨,陆宇平 (南京航空航天大学自动化学院,南京210016) 摘 要:在无线局域网环境中,建立了一套以移动机器人为控制对象的、模拟Internet传输特征的远程控制技术研究平台。通过可视化的人机接口界面,可以直接向远端机器人发送控制指令,并能看到反馈的状态数据;还可通过手柄控制,语音控制、命令集可编程接口等方式控制机器人。最后的开发实例具有操作简便、界面友好、易于扩展等特点。 关键词:人机接口;Speec h API;机器人 Man-machine interface of robot wirless remote distance control system WANG Xiao-heng,LU Yu-ping (College of Auto mation,Nanjing University of Aeronautics and Astronautics,Nanjing210016,C hina) Abstract:The research platform of remote distance control technology of simulating the characters of Internet communication is established in wireless local area network.The operators can directly send control instr uc-tions to the remote robot,and vie w the feedbacked state data through the visualized man-machine interface, also can control the r emote robot by handle c ontr ol,speech control,pr ogrammable command sets and so on. The instance has some advantages such as convenient operation,friendly interface,adapted extension. Key words:man-machine interface;Speech API;robot 0 引言 近年来,基于Internet的远程控制技术是一个研究热点,随着无线网络技术的发展和日益成熟,使得基于无线网络的远程控制技术的研究得到了极大的关注。 利用VC++设计了一套以移动机器人为复杂控制对象,在无线局域网环境下模拟广域网络的特征,用软件的方式人为再现不确定性时延,数据传输丢失等网络现象的远程技术研究平台。并利用该开发平台建立一套面向无线网的机器人远程控制系统。该平台通过可视化的人机接口界面可方便的进行操作和进一步的研究。 1 硬件环境 如图1所示,在实验室内搭建了无线网络环境,无线路由器通过其广域连接端口连接到校园网,并能通过校园网访问Internet,从而构成了一个广域网系统。机器人通过其车载计算机上的无线网卡与实验室内的无线局域网互联,可以实现从网络的任何节点来远程控制机器人 。 图1 硬件结构 被控的机器人采用了美国Activmedia Robotics 公司的P3-DX多功能智能移动机器人,它配备了车载计算机(装有无线网卡、视频采集卡)、带抓手的 收稿日期:2006-08-08 基金项目:国家863重点课题资助项目(2003AA755021) 作者简介:王晓亨(1981-),男,硕士研究生。主要从事网络与控制等方向的研究。 DOI:10.13274/https://www.360docs.net/doc/3214349460.html, ki.hdzj.2007.01.001 工业机器人控制系统组成及典型结构 一、工业机器人控制系统所要达到的功能 机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能如下: 1、记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。 2、示教功能:离线编程,在线示教,间接示教。在线示教包括示教盒和导引示教两种。 3、与外围设备联系功能:输入和输出接口、通信接口、网络接口、同步接口。 4、坐标设置功能:有关节、绝对、工具、用户自定义四种坐标系。 5、人机接口:示教盒、操作面板、显示屏。 6、传感器接口:位置检测、视觉、触觉、力觉等。 7、位置伺服功能:机器人多轴联动、运动控制、速度和加速度控制、动态补偿等。 8、故障诊断安全保护功能:运行时系统状态监视、故障状态下的安全保护和故障自诊断。 二、工业机器人控制系统的组成 1、控制计算机:控制系统的调度指挥机构。一般为微型机、微处理器有32位、64位等如奔腾系列CPU以及其他类型CPU。 2、示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的CPU以及存储单元,与主计算机之间以串行通信方式实现信息交互。 3、操作面板:由各种操作按键、状态指示灯构成,只完成基本功能操作。 4、硬盘和软盘存储存:储机器人工作程序的外围存储器。 5、数字和模拟量输入输出:各种状态和控制命令的输入或输出。 6、打印机接口:记录需要输出的各种信息。 7、传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。 8、轴控制器:完成机器人各关节位置、速度和加速度控制。 9、辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等。 10、通信接口:实现机器人和其他设备的信息交换,一般有串行接口、并行接口等。 11、网络接口 1)Ethernet接口:可通过以太网实现数台或单台机器人的直接PC通信,数据传输速率高达10Mbit/s,可直接在PC上用windows库函数进行应用程序编程之后,支持TCP/IP通信协议,通过Ethernet接口将数据及程序装入各个机器人控制器中。 无人机飞行路线控制系统设计 由于无人机是通过无线遥控的方式完成自动飞行和执行各种任务,具有安全零伤亡、低能耗、重复利用率高、控制方便等优点,因此得到了各个国家、各行各业的高度重视和广泛应用。尤其以美国为代表,无论是在军事、民用、环境保护还是科学研究中,都将无人机的使用发挥到淋漓尽致,其拥有全球最先进的“捕食者”和“全球鹰”战斗无人机、监测鸟类的“大乌鸦”无人机、民用用途的“伊哈纳”无人机等等。我国在无人机研制方面也取得了一定的成就,拥有技术卓越的“翔龙”和“暗箭”高空高速无人侦查机、多用途的“黔中”无人机、探测海洋的“天骄”无人机、中继通讯的“蜜蜂”无人机等等。在未来,随着现代化工业技术、信息技术、自动化技术、航天技术等高新技术的迅速发展,无人机技术将日趋成熟,性能日益完善,为此将拥有更为广阔的应用前景。为确保无人机能够有效地完成各种飞行任务,研发者开发了各种技术方式的飞行控制系统,完成对无人机的起飞、飞行控制、着陆以及相应目标任务等操作的控制。飞行路线控制是飞行控制系统中最基础也是最核心的功能控制部分,其它所有的飞行任务控制都是飞行路线控制的基础之上实现。目前对于无人机飞行路线的控制已有各种各样方式的系统,但大多数系统都存在一定缺陷,如有些系统操作过于繁杂,不够智能化;有些系统只能在视距范围遥 控无人机,严重限制了无人机的使用;有些系统过于专用化,不能适用于大多数类型的无人机;有些比较完善的系统,造价又过于昂贵,等等一系列问题。针对以上存在的这些问题,本课题提出了一种成本低、 遥控距离远、智能化、高效化、适用性广的无人机飞行路线控制系统设计方案。该系统方案包括两大部分,一部分是操作人员所处的地面监控系统,一部分是无人机端的受控系统,实现的机制主要是无人机不断地将自身的定位信息实时地传送给地面控制系统,地面控制系统将无人机位置信息通过电子地图可视化显示给操作人员,操作人员结合本次飞行任务,采用灵活的鼠标绘制方式在地图上绘制预定的飞行路线,地面控制系统对绘制路线进行自动处理生成可用的路线控制信息帧并发送给无人机受控系统,无人机受控系统接收到位置控制信息帧,不断结合实时的方位信息得到飞行控制信息,从而遥控无人机按照预定路线飞行。此外,为方便用户以后对历史数据的查看,以分析总结得到一些有价值的信息,地面监控系统还包含了对预定路线和无人机历史飞行路线的存储、查询和在地图中回放功能。基于GIS技术的地面监控系统的具体实现是在Windows操作系统上,采用Visual Basic作为系统开发环境并结合MSComm串口通信技术、Mapx二次开发组件技术、Winsock网络接口技术以及Access数据库技术完成软件设计,实现与无人机受控系统的无线通信、GIS系统操作和监控、历史数据存储和重现等,其中实验区域的电子地图采用Mapinfo Professional开发软件绘制完成,并创新性地设计并绘制了画面简洁的带高层信息的二点三维矢量地图,而对于绘制路线的优化和提取处理采用了垂距比值法和最小R值法。无人机端使用BDS-2/GPS双卫星系统对无人机实时位置进行高精度的定位,采用双串口单片机进行运算控制处理,实时的飞行控制信息采用了几何空间算法得到,另外采 网络工程学院《工程实践》课程实践报告 题目:远程控制系统 课程名称:工程实践 学生姓名:王静李永杰周建肖力豪唐斯亮 学生学号: 2011122008 2011122041 22011122040 2011122027 2011123032 专业班级:信安&信对 指导老师:林宏刚 2012 年 6 月28 日 引言 远程控制是当前信息技术领域的热点,使用远程控制技术,我们可以克服因地域差异而造成的操作不便,让网络的效率得到更大的发挥。随着技术的发展与网络的普及,目前远程控制技术的应用领域已经相当广泛。我们不仅可以通过远程控制技术管理远端电脑,解决远端电脑的故障,与其他同事通过网络实现远程协作,一起编辑一份文档或者与其他团队成员交流信息,还可以在家里或旅途中使用公司内部网络的数据与办公设备,实现远程办公。 目录 1.课题背景 (1) 2.目的及意义 (1) 3.任务概述 (1) 3.1目标 (1) 3.2开发工具 (2) 3.3开发语言 (2) 3.4开发环境 (2) 4需求分析 (2) 4.1市场需求 (3) 4.2功能需求 (3) 4.3性能需求 (5) 4.4系统流程图 (6) 5参考文献 (7) 1 课题背景 通常企业内部或IT公司的客户技术支持部门都有技术支持业务,其任务是通过电话解答疑难问题,努力减少技术人员到现场服务或者让用户把设备送到支持中心进行维护。这种技术支持方式尽管被普遍采用,但效率不高而且大大增加了技术支持成本。通常,技术支持必须依赖技术人员和用户之间的口头交流来进行,这种交流既耗时又容易出错。许多商业用户对计算机知之甚少,然而当遇到问题时,他们必须向技术人员提供故障情报及相关操作。在尝试解决问题时,技术人员可能指导用户执行一系列复杂的过程,而这些过程对用户来说或许完全不熟悉,如果用户不能正确的按要求操作,反而使问题恶化。此外,如果通过电话不能解决问题,那么在技术人员亲自到用户现场解决问题之前,计算机将无法继续使用,导致工作延误。 对于网络管理人员来说,在整个网络运行期间,希望能够实时的监控联网计算机的运行状态和进行一些相关操作;希望能够传输文件;希望能够防止病毒的蔓延、非法程序的拷贝、杜绝某些用户的越权或非法操作等。 2 目的及意义 本文正是在上文提到的背景下提出的,目的就是为了解决计算机的远程操作,降低企业对软件的后期维护成本,设计出一款远程控制系统。远程控制系统能使技术人员直接操作远程计算机,就像操作本地机器一样,无须用户介入,技术人员技就能得到该机器的问题的第一手材料,从而加快了问题的解决。实际上,使用远程控制工具的技术人员能够做到解答疑难问题,安装和配置软件,把软件下载到用户计算机上,配置应用程序和系统软件设置并可通过实际操作培训用户。总之,本课题的设计与实现具有很大的现实意义。 3任务概述 3.1目标 本项目设计为一款远程控制软件,目的是为了实现在局域网环境下实现比较高效的远程协助功能,主要功能将有屏幕监视、鼠标键盘的消息控制,和远程执行命令的功能。待开发的软件功能: 浅析无人机航空摄影测量系统及应用 发表时间:2017-10-26T19:53:11.473Z 来源:《建筑科技》2017年9期作者:舒永国 [导读] 发展低空无人飞行器航测遥感系统是提高测绘现势性的迫切需要,是做好应急救急工作的迫切需要,是构建数字中国、数字城市建设的迫切需要。基于此,本文主要对无人机航空摄影测量系统及应用进行分析探讨。 北京市自来水集团禹通市政工程有限公司北京 100089 摘要:测绘测量技术系统是应对自然灾害、有效处置突发事件、构建完善保障系统与加强防灾减灾工作建设的重要组成部分,也是目前的一个重要战略问题。发展低空无人飞行器航测遥感系统是提高测绘现势性的迫切需要,是做好应急救急工作的迫切需要,是构建数字中国、数字城市建设的迫切需要。基于此,本文主要对无人机航空摄影测量系统及应用进行分析探讨。 关键词:无人机;航空摄影;测量系统;应用 1、前言 航空数字摄影测量是基础地理信息采集的最有效手段之一。随着计算机技术的发展和微处理机的广泛应用,政府各部门对测绘资料的需求越来越大,对资料现势性要求越来越高,对资料所能包涵的信息容量越来越多。无人机航空摄影测量作为一种新型的测量方式不断呈现在大家的面前,伴随着高科技技术环境下测绘技术与测绘装备的快速发展,融合了无人机技术、航空摄影技术、移动测量技术、数字通信技术等一系列新兴技术形态的无人机航空摄影测量系统成为防灾减灾的重要手段,它建立起一整套综合应急测绘保障服务系统。 2、无人机航空摄影测量系统 目前,国内已经投入使用的无人机航空摄影测量系统有“华鹰”、“飞象”、“QuickEye”等。无人机航空摄影测量系统主要由硬件系统和软件系统组成。硬件系统包括机载系统和地面监控系统;软件系统则涵盖了航线设计、飞行控制、远程监控、航摄检查、数据预处理等五个主要的系统。 2.1硬件系统 2.1.1无人机机载系统 在整个无人机航空摄影测量系统构成中,无人机作为主要的系统搭载平台,是整个系统集成与融合的重要基础。这一硬件系统主要由无人机、数字摄影系统、导航与飞行控制系统、通信系统等部分构成。在该系统工作的过程中,整个系统会按照预先设定的航线进行相应的自主飞行,并且完成预先设定的航空摄影测量任务,同时实时地把飞机的速度、高度、飞行状态、气象状况等参数传输给地面控制系统。 2.1.2地面飞行监控系统 这一分支系统是影响飞行平台运行的重要因素,主要有电子计算机、飞行控制软件、电子通信控制介质和电台等设备。在飞行平台的运行过程中,地面飞行控制系统可以据无人机飞行控制系统发回的飞行参数信息,实时在地图上精确标定飞机的位置、飞行路线、轨迹、速度、高度和飞行姿态,使地面操作人员更容易掌握无人机的飞行状况。 2.2软件系统 2.2.1航线设计软件 航线设计在无人机航空摄影测量系统中扮演着十分重要的角色,其直接决定了整个系统工作的方向和精准度。这一分支系统作为信息采集的关键步骤,需要对于系统运行经过的作业范围、地形地貌特点、属性精度要求、摄影测量参数以及摄影测量的结果进行综合设定。航线设计软件需要对相关的工作参数进行综合设定,诸如计算行高、重叠度和地面分辨率等飞行参数,进而获得飞行所需的曝光点坐标、基线长度等参数。此外,航线设计软件还有一个十分重要的功能,那就是对于设计好的航线进行检查,诸如:航线走向、摄影基面、行高、地面分辨率和像片重叠度等。 2.2.2数据接受与预处理系统 这是无人机系统中最为重要的软件系统,也是无人机航空摄影测量系统室外作业的最后一步,直接影响到后续的图像数据处理质量。一般情况下,无人机航空摄影测量系统在影像获取过程中,由于受外界和内部因素的影响,可能降低获取的原始图像的质量。为避免原始图像后续处理的质量问题,在影像配准、拼接之前,必须对原始影像进行预处理。这一预处理的过程,先后涵盖了图像校正、图像增强等方面。 3、项目应用实践 3.1工程概况 井山水库位于抚河流域东乡河南港支流黎圩水上游,地处江西省抚州市东乡县黎圩镇内,坝址位于南港支流东乡县黎圩镇井山村上游河段1.0km狭谷段,坝址区距黎圩镇约5km,距东乡县县城约25km,控制流域面积25.2km2,正常蓄水位83.00m(黄海高程,下同),总库容2250×104m3,是一座灌溉、供水等综合效益的中型水利枢纽工程。 3.2外业测量 3.2.1航摄 航摄仪采用Sonya7R,焦距35mm,相幅大小为:7360×4192,像元分辨率为4.88um。本次无人机航摄分两个架次进行,由GPS领航数据计算相对飞行高度为724m,地面分辨率为0.09m,航摄面积约10km2。两个架次飞行质量和影像良好,影像清晰度较高,且照片色彩均匀,饱和度良好,能够表达真实的地物信息,可以满足1:2000成图要求。本次飞行航向重叠度为75%,旁向重叠度为50%。 3.2.2像控测量 像控点的布设应能够有效控制成图的范围,测区的四周及中心位置必须布设控制点,根据测区的情况,每个测区布设控制点20多个,且都设置为平高点。 3.2.3空中三角测量 本项目采用SVS软件进行空三加密,根据航空飞行及影像分布情况,将空三区域分为两个加密区域网采用自动与手动相结合的方式进行空三加密,即采用自动匹配进行像点量测,剔除粗差。人工调整直至连接点符合规范要求,保证在2/3个像素以内。加入外业像控点对本 图片简介: 本技术涉及一种基于Kinect的机器人人机交互系统及方法,系统包括Kinect信息采集模块、人机交互模块、姿态控制模块、语音控制模块、Kinect三维传感器、机器人控制箱和机器人;首先通过Kinect信息采集模块,将图像数据流和音频数据流传递给人机交互模块,通过人机交互模块的语音/文字提示引导用户选择不同的控制模式,进而调用不同的控制模块,实现对机器人的操控。本技术综合体感、声音、手势多种交互方式,可实现对机器人的运动控制,代替人工在非结构化场景中进行作业,提高机器人的作业能力和智能水平。 技术要求 1.一种基于Kinect的机器人人机交互系统,其特征在于,包括Kinect信息采集模块、人机交互模块、姿态控制模块、语音控制模块、Kinect三维传感器、机器人控制箱和机器人; Kinect信息采集模块利用Kinect三维传感器,获取图像数据流及语音数据流; 通过人机交互模块选择不同的控制模式,调用姿态控制模块或语音控制模块; 姿态控制模块基于图像数据,根据人体姿态控制机器人机械臂运动; 语音控制模块基于语音数据,实现语音指令的识别,控制机器人进行相应动作。 2.根据权利要求1所述的基于Kinect的机器人人机交互系统,其特征在于,人机交互模块提示用户选择控制模式,包括语音提示和文字提示。 3.一种基于权利要求1所述基于Kinect的机器人人机交互系统的人机交互方法,其特征在于,包括以下步骤: 利用Kinect三维传感器,获取图像数据流及语音数据流; 基于图像数据,根据人体姿态控制机器人机械臂运动; 基于语音数据处理结果,实现语音指令的识别,控制机器人进行相应动作; 通过人机交互模块的语音/文字提示选择不同的控制模式,调用不同的控制模块,实现人机交互。 4.根据权利要求3所述的基于Kinect的机器人人机交互方法,其特征在于,利用Kinect三维传感器,获取多种图像数据信息流及语音信息流,具体为: 12. 远程控制 关于无人机飞行控制系统的全面解析 飞控的大脑:微控制器在四轴飞行器的飞控主板上,需要用到的芯片并不多。目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能。意法半导体高级市场工程师介绍,无人机/多轴飞行器主要部件包括飞行控制以及遥控器两部分。其中飞行控制包括电调/马达控制、飞机姿态控制以及云台控制等。目前主流的电调控制方式主要分成BLDC方波控制以及FOC正弦波控制。 高通和英特尔推的飞控主芯片CES上我们看到了高通和英特尔展示了功能更为丰富的多轴飞行器,他们采用了比微控制器(MCU)更为强大的CPU或是ARM Cortex-A系列处理器作为飞控主芯片。例如,高通CES上展示的Snapdragon Cargo无人机是基于高通Snapdragon芯片开发出来的飞行控制器,它有无线通信、传感器集成和空间定位等功能。Intel CEO Brian Krzanich也亲自在CES上演示了他们的无人机。这款无人机采用了RealSense技术,能够建起3D地图和感知周围环境,它可以像一只蝙蝠一样飞行,能主动避免障碍物。英特尔的无人机是与一家德国工业无人机厂商Ascending Technologies合作开发,内置了高达6个英特的RealSense3D摄像头,以及采用了四核的英特尔凌动(Atom)处理器的PCI-express定制卡,来处理距离远近与传感器的实时信息,以及如何避免近距离的障碍物。这两家公司在CES展示如此强大功能的无人机,一是看好无人机的市场,二是美国即将推出相关法规,对无人机的飞行将有严格的管控。 多轴无人机的EMS/传感器某无人机方案商总经理认为,目前业内的玩具级飞行器,虽然大部分从三轴升级到了六轴MEMS,但通常采用的都是消费类产品如平板或手机上较常用的价格敏感型型号。在专业航拍以及专为航模发烧友开发的中高端无人机上,则会用到质量更为价格更高的传感器,以保障无人机更为稳定、安全的飞行。这些MEMS传感器主要用来实现飞行器的平稳控制和辅助导航。飞行器之所以能悬停,可以做航拍,是因为MEMS传感器可以检测飞行器在飞行过程中的俯仰角和滚转角变化,在检测到角度变化 安川机器人远程控制总结 一、master程序 1、master程序的设置 单击【主菜单】—>选择屏幕上的【程序内容】—>【新建程序】,如图1-1。 图1-1 单击【选择】显示如图1-2所示的界面,单击【选择】,输入程序名,单击软键盘【ENTER】,显示如图1-3所示的界面,单击【执行】,此处程序名为“MASTER”,程序创建完毕。 图1-2 图1-3 单击【主菜单】—>选择屏幕上的【程序内容】—>【主程序】,如图1-4。 图1-4 单击【选择】,显示如图1-5所示的设置主程序界面。 图1-5 单击【选择】,出现如图1-6所示的界面,单击【向下】选择“设置主程序”。 图1-6 显示如图1-7所示的界面,单击【向下】选择“MASTER”单击【选择】。 如图1-7 主程序设置完毕。 2、MASTER程序的编辑 单击【主菜单】—>选择【程序内容】—>【选择程序】—>【选择】,出现如图1-7所示的界面,单击【向下】,选择“MSATER”,单击【选择】。在如图2-1所示的界面下编辑主程序。 图2-1 此处以2个工位,每个工位3种工件的工作站为例创建主程序内容,需要熟悉机器人示教器的基本操作(如【命令一览】【插入】【回车】【选择】)。 插入DOUT OT#(1) OFF程序举例: 光标定位在左侧行号处,如图2-2,如图单击【命令一览】,选择【I/O】,单击【选择】,选择【DOUT】,如图2-3所示的界面 图2-2 图2-3 单击【选择】,显示如图2-4所示的界面,光标定位在“DOUT”上,单击【选择】,显示如图2-5所示的界面,光标定位到“数据”行的ON,单击【选择】,切换成“OFF”,单击两次【回车】则可出入该指令。需要指出的是在光标定位处插入指令是向下插入。 图2-4 图2-5 程序内容如下(安装在机器人中的MASTER程序见附件MASTER):第二行的NAME才是机器人控制器登录的程序名,单纯的修改文件名不能改变程 序名 /JOB //NAME MASTER PLC 远程监控系统、PLC 远程控制系统 应用案例1:企业自动化设备远程监测 项目概况: 山东某制造型企业的多个车间均通过PLC 采集各生产设备的实时状态和运行数据,并进行自动化控制。 PLC 远程监控系统为及时掌握生产数据、统筹生产管理,该企业建立了生产监控中心,将各PLC 联网,对生产设备实施远程、集中监控。 系统组成: RS232 RS232 西门子PLC DATA-6108 GPRS INTERNET 系统组成示意图 西门子PLC GPRS/CDMA DTU DATA-6108 GPRS/CDMA DTU 系统说明: 1、GPRS/CDMA DTU(DATA-6108)采用DC 12V/ 24V供电,体积小巧,直接安装在 PLC柜中。 2、西门子PLC通过RS232串口对外通讯,并设置为MODBUS_RTU(从站)工作模 式。 (备注:PLC相当于支持MODBUS协议的二次表) 3、三维力控组态软件支持唐山平升DTU驱动,实现无障碍对接。 应用案例2:化工企业废水处理监测系统 项目概况: 江苏某化工企业是水污染大户,为响应政府“全面控制污染物排放、狠抓工业污染防治”的要求、实现废水达标排放,该企业对原有废水处理系统进行了自动化和信息化改造,通过PLC自动控制水处理设备的运行并在线监测废水水质和系统运行状态。 针对废水处理系统设备分散、过程复杂、布线不便的特点,该企业通过DTU和组态软件实现了系统的远程监测和预警。 系统组成: 系统说明: 1、现场GPRS/CDMA DTU(DATA-6124)和中心GPRS/CDMA DTU(DATA-6107)内均安装GPRS-VPN 专网数据卡。 2、GPRS/CDMA DTU 均设置成 B 型设备,实现数据透明传输。 3、INTOUCH 组态软件通过KEPServer 软件(使用Modbus 命令)和GPRS/CDMA DTU(DATA-6107) 自动远程读取各监测现场的相关数据。 应用案例3:多台PLC 联动控制 RS232 RS232 三菱PLC 三菱PLC DATA-6124 DATA-6124 GPRS-VPN 监测电脑及INTOUCH 组态软件 RS232 DATA-6107 系统组成示意图 GPRS/CDMA DTU GPRS/CDMA DTU GPRS/CDMA DTU 一.工业机器人组成系统 工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括腰部、肩部、肘部和手腕部,其中手腕部有3个运动自由度。驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作。控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。 工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。 工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。 示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。在示教过程的同时,工作程序的信息即自动存入程序存储器中在机器人自动工作时,控制系统从程序存储器中检出相应信息,将指令信号传给驱动机构,使执行机构再现示教的各种动作。示教输入程序的工业机器人称为示教再现型工业机器人。 几个问题: (1)巨轮机器人JLRB20KG机器人是点位型还是连续轨迹型? (2)能不能编写一个简单程序,使机器人能够的末端能够走一个圆? (3)能不能控制机器人中每一个电机的输出功率或扭矩? (4)机器人每一个关节从驱动电机到执行机构的传递效率有没有? 二.工业机器人的主体 机器人本体由机座、腰部、大臂、小臂、手腕、末端执行器和驱动装置组成。共有六个自由度,依次为腰部回转、大臂俯仰、小臂俯仰、手腕回转、手腕俯仰、手腕侧摆。机器人采用电机驱动,电机分为步进电机或直流伺服电机。直流伺服电机能构成闭环控制、精度高、额定转速高、但价格较高,而步进电机驱动具有成本低、控制系统简单。 各部件组成和功能描述如下: (1)基座:基座是机器人的基础部分,起支撑作用。整个执行机构和驱动装置都安装在基座。 (2)腰部:腰部是机器人手臂的支撑部分,腰部回转部件包括腰部支架、回转轴、支架、谐波减速器、制动器和步进电机等。 (3)大臂:大臂和传动部件 (4)小臂:小臂、减速齿轮箱、传动部件、传动轴等,在小臂前端固定驱动手腕三个运一种智能机器人系统设计和实现.
外网远程控制WIFI智能小车机器人
从人体解剖学分析机器人的人机交互及控制系统
安川机器人远程控制总结 _机器人端
快思聪远程控制方法
无人机飞行控制方法概述
机器人无线远程控制系统的人机接口_王晓亨
工业机器人控制系统组成及典型结构
无人机飞行路线控制系统设计
远程控制系统需求分析
浅析无人机航空摄影测量系统及应用
基于Kinect的机器人人机交互系统及方法与制作流程
ROBOT 远程控制
12. 远程控制
借助输入/输出、Ethernet (TCP/IP) 和 RS-232C,控制器可以从外部设备上控制机器 人。外部设备可以执行多个命令,包括 Motor On/Off、开始、暂停、继续和停止。 有关远程 I/O 的扩展功能的详细信息,请参阅 EPSON RC+ 7.0 远程控制参考手册 。
12.1 远程 I/O
远程控制的配置需要有三个基本步骤:
1. 使用[设置]-[设置控制器]-[远程控制]页面上的[远程控制]来配置远程控制输入和 输出。 最初并不分配到远程功能上。
2. 将控制装置设置到[设置]-[设置控制器]-[配置]页面上的远程控制上。 若要启用外部远程输入,分配远程功能并将远程功能设置到控制设备上。设置为 远程控制设备时,控制器只能从远程设备上进行控制。
远程控制功能可在以下系统中使用。
示例:从 PLC 上控制机器人 使用远程控制从 PLC 上控制机器人(控制器)。 使用 PLC 时,您需要熟悉使用远程输入所需的信号交换。详见下文。
示例:使用带按钮和指示灯的按钮盒来控制机器人 这 些 灯 连 接 到 控 制 器 上 的 远 程 控 制 输 出 上 来 指 示 状 态 , 如 AutoMode 、 MotorOn、Error 等。这些按钮连接到远程输入上来控制电机功率和启动程序。
有关 I/O 连接的详细信息,请参阅以下手册。
机器人控制器的设置与操作
I/O 连接器
I/O 远程设置
扩展 I/O 板
机器人控制器选件现场总线 I/O
EPSON RC+ 7.0(Ver.7.0)用户指南 Rev.3
281关于无人机飞行控制系统的全面解析
安川机器人远程控制总结机器人端
PLC远程监控系统、PLC远程控制系统
机器人的组成系统