机械原理课程设计—颚式破碎机设计说明书DOC
目录
一设计题目 (1)
二已知条件及设计要求 (1)
2.1已知条件 (1)
2.2设计要求 (2)
三. 机构的结构分析 (2)
3.1六杆铰链式破碎机 (2)
3.2四杆铰链式破碎机 (2)
四. 机构的运动分析 (2)
4.1六杆铰链式颚式破碎机的运动分析 (2)
4.2四杆铰链式颚式破碎机的运动分析 (6)
五.机构的动态静力分析 (7)
5.1六杆铰链式颚式破碎机的静力分析 (7)
5.2四杆铰链式颚式破碎机的静力分析 (12)
六. 工艺阻力函数及飞轮的转动惯量函数 (17)
6.1工艺阻力函数程序 (17)
6.2飞轮的转动惯量函数程序 (17)
七 .对两种机构的综合评价 (21)
八 . 主要的收获和建议 (22)
九 . 参考文献 (22)
一.设计题目:铰链式颚式破碎机方案分析
二.已知条件及设计要求
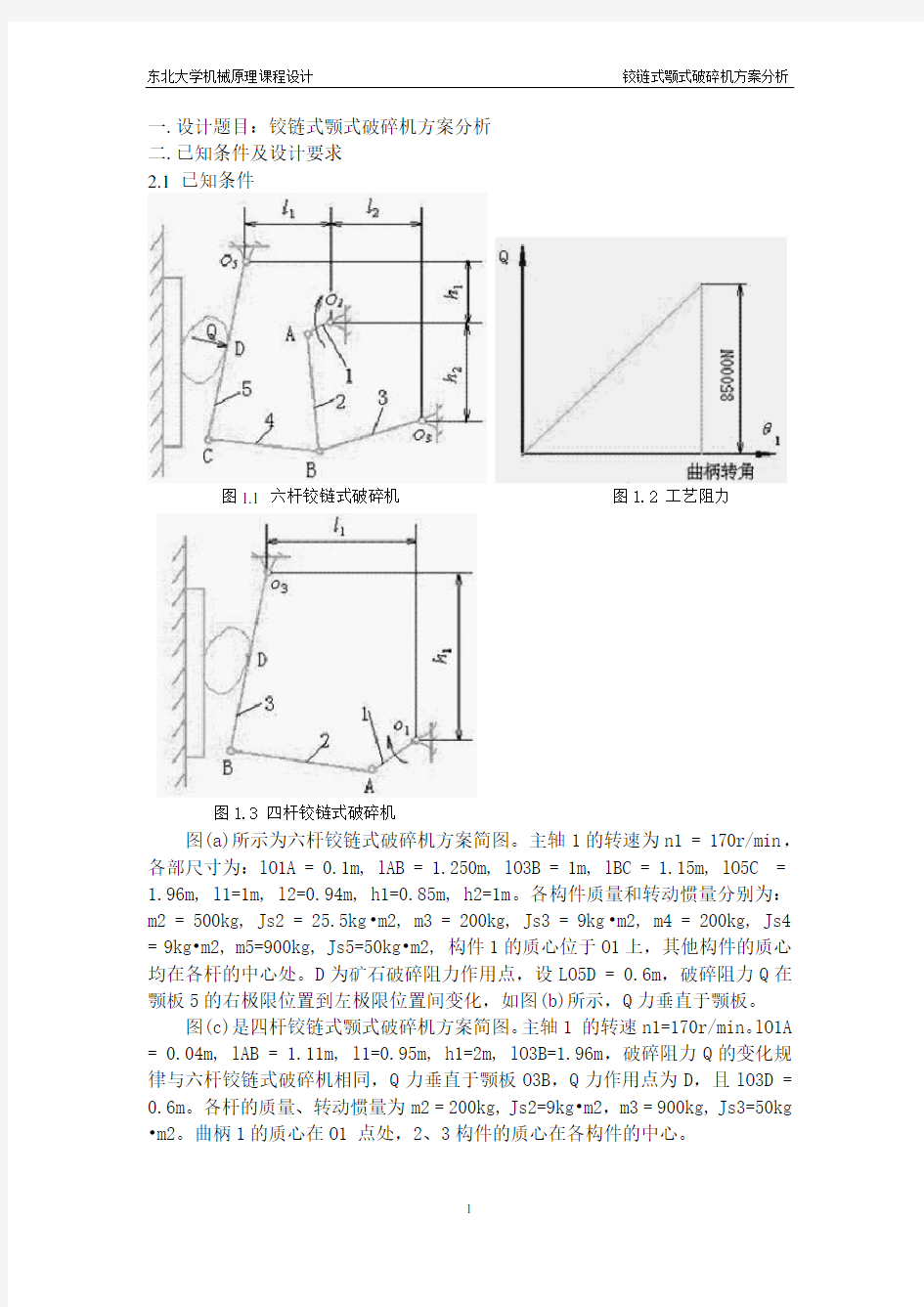
2.1已知条件
图1.1 六杆铰链式破碎机图1.2 工艺阻力
图1.3四杆铰链式破碎机
图(a)所示为六杆铰链式破碎机方案简图。主轴1的转速为n1 = 170r/min,各部尺寸为:lO1A = 0.1m, lAB = 1.250m, lO3B = 1m, lBC = 1.15m, lO5C = 1.96m, l1=1m, l2=0.94m, h1=0.85m, h2=1m。各构件质量和转动惯量分别为:m2 = 500kg, Js2 = 25.5kg?m2, m3 = 200kg, Js3 = 9kg?m2, m4 = 200kg, Js4 = 9kg?m2, m5=900kg, Js5=50kg?m2, 构件1的质心位于O1上,其他构件的质心均在各杆的中心处。D为矿石破碎阻力作用点,设LO5D = 0.6m,破碎阻力Q在颚板5的右极限位置到左极限位置间变化,如图(b)所示,Q力垂直于颚板。
图(c)是四杆铰链式颚式破碎机方案简图。主轴1 的转速n1=170r/min。lO1A = 0.04m, lAB = 1.11m, l1=0.95m, h1=2m, lO3B=1.96m,破碎阻力Q的变化规律与六杆铰链式破碎机相同,Q力垂直于颚板O3B,Q力作用点为D,且lO3D = 0.6m。各杆的质量、转动惯量为m2 = 200kg, Js2=9kg?m2,m3 = 900kg, Js3=50kg ?m2。曲柄1的质心在O1 点处,2、3构件的质心在各构件的中心。
2.2 设计要求
试比较两个方案进行综合评价。主要比较以下几方面:
1. 进行运动分析,画出颚板的角位移、角速度、角加速度随曲柄转角的变化曲线。
2. 进行动态静力分析,比较颚板摆动中心运动副反力的大小及方向变化规律,曲柄上的平衡力矩大小及方向变化规律。
3. 飞轮转动惯量的大小。 三.机构的结构分析 3.1六杆铰链式破碎机
六杆铰链式粉碎机拆分为机架和主动件①,②③构件组成的RRR 杆组,④⑤构件组成的RRR 杆组。
+ +
3.2四杆铰链式破碎机
四杆铰链式破碎机拆分为机架和主动件①,②③构件组成的RRR 杆组。
+
四.机构的运动分析
4.1六杆铰链式颚式破碎机的运动分析。 4.1.1 杆件的运动参数。
1) 调用bark 函数求主动件①的运动参数。 2)调用rrrk 函数求②、③构件组成的RRR 杆组进行运动分析。 形式参数 m
n1 n2 n3 k1 k2
r1 r2 t w e p vp ap
实 值
-1
2
4
3
2
3
R2
3
R34 t w e p vp ap
3)调用rrrk 函数对④、⑤构件组成的RRR 杆组进行运动分析。 形式参数 m
n1 n2 n3 k1 k2 r1
r2 t w e p vp
ap
形式参数 n1 n2 n3 k r1
r2 game
t w e p vp ap 实 值
1
2
1
r12 0.0
0.0
t
w
e
p
vp ap
实值 1 3 6 5 4 5 r35 R56 t w e p vp ap
4.1.2 写主程序并运行。
按一定的步长,改变主动件的位置角度,使其在0-360°变化,便可求出机构各点在整个运动循环内的运动参数并打印输出。
(1)主程序。
#include"subk.c"
#include"draw.c"
main()
{
static double p[20][2],vp[20][2],ap[20][2],del;
static double t[10],w[10],e[10],pdraw[370],
vpdraw[370],apdraw[370];
static int ic;
double r12,r23,r34,r35,r56,r611;
double pi,dr;int i;
FILE *fp;
r12=0.1;r23=1.250;r34=1.0;r35=1.15;r56=1.96;r611=0.6;
pi=4.0*atan(1.0);dr=pi/180.0;
w[1]=-170*2*pi/60;e[1]=0.0;del=15.0;
p[1][1]=0.0;p[1][2]=0.0;p[4][1]=0.94;p[4][2]=-1;p[6][1]=-1;
p[6][2]=0.85;
printf("\n The Kinematic Parameters of Point 5\n");
printf("No THETA1 S5 V5 A5\n");
printf(" deg rad rad/s rad/s/s\n");
if((fp=fopen("sgy","w"))==NULL)
{
printf("can't open this file.\n");
exit(0);
}
fprintf(fp,"\n The Kinematic Parameters of Point 5\n");
fprintf(fp,"No THETA1 S5 V5 A5\n");
fprintf(fp," deg rad rad/s rad/s/s\n");
ic=(int)(360.0/del);
for(i=0;i<=ic;i++)
{
t[1]=(-i)*del*dr;
bark(1,2,0,1,r12,0.0,0.0,t,w,e,p,vp,ap);
rrrk(-1,2,4,3,2,3,r23,r34,t,w,e,p,vp,ap);
rrrk(1,3,6,5,4,5,r35,r56,t,w,e,p,vp,ap);
bark(2,0,7,2,0.0,r23/2,0.0,t,w,e,p,vp,ap);
bark(4,0,8,3,0.0,r34/2,0.0,t,w,e,p,vp,ap);
bark(3,0,9,4,0.0,r35/2,0.0,t,w,e,p,vp,ap);
bark(6,0,10,5,0.0,r56/2,0.0,t,w,e,p,vp,ap);
bark(6,0,11,5,0.0,r611,0.0,t,w,e,p,vp,ap);
printf("\n%2d%12.3f%12.3f%12.3f%12.3f",i+1,t[1]/dr,t[5],w[5],e[5] );
fprintf(fp,"\n%2d%12.3f%12.3f%12.3f%12.3f",i+1,t[1]/dr,t[5],w[5], e[5]);
pdraw[i]=t[5];
vpdraw[i]=w[5];
apdraw[i]=e[5];
if((i%16)==0){getch();}
}
fclose(fp);
getch();
draw1(del,pdraw,vpdraw,apdraw,ic);
}
(2)运行结果。
①件5的运动参数:
The Kinematic Parameters of Point 5
No THETA1 S5 V5 A5
deg rad rad/s rad/s/s
1 0.000 -1.658 0.346 3.956
2 -15.000 -1.65
3 0.392 2.002
3 -30.000 -1.647 0.400 -0.932
4 -45.000 -1.641 0.362 -4.355
5 -60.000 -1.637 0.274 -7.506
6 -75.000 -1.633 0.146 -9.612
7 -90.000 -1.632 -0.001 -10.183
8 -105.000 -1.633 -0.145 -9.165
9 -120.000 -1.637 -0.265 -6.904
10 -135.000 -1.641 -0.345 -3.981
11 -150.000 -1.646 -0.382 -1.008
12 -165.000 -1.652 -0.377 1.519
13 -180.000 -1.657 -0.341 3.297
14 -195.000 -1.662 -0.284 4.237
15 -210.000 -1.666 -0.220 4.436
16 -225.000 -1.668 -0.156 4.121
17 -240.000 -1.670 -0.10 3.584
18 -255.000 -1.671 -0.051 3.105 19 -270.000 -1.672 -0.007 2.898 20 -285.000 -1.672 0.036 3.063 21 -300.000 -1.671 0.085 3.571 22 -315.000 -1.669 0.142 4.247 23 -330.000 -1.667 0.209 4.791 24 -345.000 -1.663 0.281 4.817 25 -360.000 -1.658 0.346 3.956 ② 动图形:
4.2杆铰链式颚式破碎机的运动分析。 4.2.1运动参数。
1)调用bark 函数求主动件①的运动参数。 2)调用rrrk 函数求②、③构件组成的RRR 杆组进行运动分析。 形式参数 m n1 n2 n3 k1 k2 r1 r2
t w e p vp ap 实 值
1
2
4
3
2
3
r23 r34
t w
e
p vp ap
4.2.2 写主程序并运行。
按一定的步长,改变主动件的位置角度,使其在0-360°变化,便可求出机构各点在整个运动循环内的运动参数并打印输出。 (1)主程序。
#include"subk.c" #include"draw.c" main()
形式参数 n1 n2 n3 k r1
r2
game t
w e p vp ap 实 值
1
2
1
r12 0.0 0.0
t
w
e
p
vp ap
{
static double p[20][2],vp[20][2],ap[20][2],del;
static double t[10],w[10],e[10],pdraw[370],vpdraw[370],apdraw[370]; static int ic;
double r12,r23,r34,r47;
double pi,dr;int i;
FILE *fp;
r12=0.04;r23=1.11;r34=1.96;r47=0.6;
pi=4.0*atan(1.0);
dr=pi/180.0;
w[1]=-170*2*pi/60;e[1]=0.0;del=15.0;
p[1][1]=0.0;p[1][2]=0.0;p[4][1]=-0.95;p[4][2]=2.0;
printf("\n The Kinematic Parameters of Point 5\n");
printf("No THETA1 S5 V5 A5\n");
printf(" deg rad rad/s rad/s/s\n");
if((fp=fopen("sgy1","w"))==NULL)
{
printf("can't open this file.\n");
exit(0);
}
fprintf(fp,"\n The Kinematic Parameters of Point 5\n");
fprintf(fp,"No THETA1 S5 V5 A5\n");
fprintf(fp," deg rad rad/s rad/s/s\n");
ic=(int)(360.0/del);
for(i=0;i<=ic;i++)
{
t[1]=(-i)*del*dr;
bark(1,2,0,1,r12,0.0,0.0,t,w,e,p,vp,ap);
rrrk(1,2,4,3,2,3,r23,r34,t,w,e,p,vp,ap);
bark(2,0,5,2,0.0,r23/2,0.0,t,w,e,p,vp,ap);
bark(4,0,6,3,0.0,r34/2,0.0,t,w,e,p,vp,ap);
bark(4,0,7,3,0.0,0.6,0.0,t,w,e,p,vp,ap);
printf("\n%2d%12.3f%12.3f%12.3f%12.3f",i+1,t[1]/dr,t[3],w[3],e[3]); fprintf(fp,"\n%2d%12.3f%12.3f%12.3f%12.3f",i+1,t[1]/dr,t[3],w[3],e[3] );
pdraw[i]=t[3];vpdraw[i]=w[3];apdraw[i]=e[3];
if((i%16)==0){getch();}
}
fclose(fp);
getch();
draw1(del,pdraw,vpdraw,apdraw,ic);
}
(2)运行结果。
①杆件3的运动参数:
The Kinematic Parameters of Point 5
No THETA1 S5 V5 A5
deg rad rad/s rad/s/s
1 0.000 -1.63
2 0.014 -6.232
2 -15.000 -1.632 -0.077 -6.098
3 -30.000 -1.63
4 -0.163 -5.591
4 -45.000 -1.637 -0.240 -4.731
5 -60.000 -1.641 -0.301 -3.553
6 -75.000 -1.646 -0.343 -2.117
7 -90.000 -1.651 -0.362 -0.501
8 -105.000 -1.656 -0.357 1.192
9 -120.000 -1.661 -0.327 2.848
10 -135.000 -1.666 -0.274 4.339
11 -150.000 -1.669 -0.201 5.544
12 -165.000 -1.671 -0.113 6.358
13 -180.000 -1.672 -0.016 6.703
14 -195.000 -1.672 0.082 6.545
15 -210.000 -1.670 0.174 5.894
16 -225.000 -1.667 0.253 4.807
17 -240.000 -1.663 0.313 3.384
18 -255.000 -1.658 0.351 1.746
19 -270.000 -1.653 0.364 0.030
20 -285.000 -1.647 0.352 -1.639
21 -300.000 -1.642 0.317 -3.149
22 -315.000 -1.638 0.261 -4.415
23 -330.000 -1.635 0.189 -5.375
24 -345.000 -1.632 0.105 -5.988
25 -360.000 -1.632 0.014 -6.232
②运动图形:
五.机构的动态静力分析
5.1六杆铰链式颚式破碎机的动态静力分析。
5.1.1 质点7,8,9,10及矿石破碎产生阻力的作用点11的运动参数; ①调用bark 函数对质点7进行运动分析: ②调用bark 函数对质点8进行运动分析: ③调用bark 函数对质点9进行运动分析: ④调用bark 函数对质点10进行运动分析: 形式参
数 n1 n2 n3
k
r1
r2
game
t
w
e
p
vp ap
实 值
2
7
2 0.0 R23/2
0.0
t
w
e
p
vp ap
形式参
数 n1 n2 n3
k
r1
r2
game
t
w
e
p
vp ap
实 值
4
8
3
0.0 R34/2
0.0
t
w
e
p
vp ap
形式参
数 n1 n2 n3
k
r1
r2
game
t
w
e
p
vp ap
实 值
3
9
4
0.0 R35/2
0.0
t
w
e
p
vp ap
形式参n1 n2 n3
k
r1
r2
game
t
w
e
p
vp ap
数
实值 6 0 10 5 0.0 R56/2 0.0 t w e p vp ap ⑤调用bark函数对质点11进行运动分析:
形式参数n1 n2 n3 k r1 r2 game t w e p vp ap 实值 6 0 11 5 0.0 r611 0.0 t w e p vp ap (2)调用rrrf函数对④、⑤构件构成的RRR杆组进行动态静力分析:
形式参数n1 n2 n3 ns1 ns2 nn1 nn2 nexf k1 实值 3 6 5 9 10 0 11 11 4 形式参数k2 p vp ap t w e fr
实值 5 p vp ap t w e fr
(3)调用rrrf函数对②、③构件构成的RRR杆组进行动态静力分析:
形式参数n1 n2 n3 ns1 ns2 nn1 nn2 nexf k1 实值 2 4 3 7 8 0 3 0 2 形式参数k2 p vp ap t w e fr
实值 3 p vp ap t w e fr
(4)调用barf函数对主动件1进行动态静力分析:
形式参数n1 ns1 nn1 k1 p ap e fr tb
实值 1 1 2 1 p ap e fr &tb
5.1.2程序并运行。
按一定的步长,改变主动件的位置角度,使其在0-360°变化,便可求出机构各运动副反力及作用在主动件上的平衡力矩。
(1)主程序。
#include "graphics.h"
#include"subk.c"
#include"subf.c"
#include"draw.c"
main()
{
static double p[20][2],vp[20][2],ap[20][2],del;
static double t[10],w[10],e[10],fr[20][2],fe[20][2];
static double sita1[370],fr1draw[370],sita2[370],fr2draw[370],
sita3[370],fr3draw[370],tbdraw[370],tb1draw[370];
static double tb,tb1,fr1,bt1,fr4,bt4,fr6,bt6,we1,we2,we3,we4,we5; static int ic;
double r12,r23,r34,r35,r56,r611;double pi,dr;int i;
FILE *fp;
sm[1]=0.0;sm[2]=500.0;sm[3]=200.0;sm[4]=200.0;sm[5]=900.0;
sj[1]=0.0;sj[2]=25.5;sj[3]=9.0;sj[4]=9.0;sj[5]=50.0;
r12=0.1;r23=1.250;r34=1.0;r35=1.15;r56=1.96;r611=0.6;
pi=4.0*atan(1.0);dr=pi/180.0;
w[1]=-170*2*pi/60;e[1]=0.0;del=10.0;p[1][1]=0.0;
p[1][2]=0.0;p[4][1]=0.94;p[4][2]=-1.0;p[6][1]=-1.0;
p[6][2]=0.85;
printf("\n The Kineto-static Analysis of a six-bar Linkase\n");
printf("No HETAL fr1 sita1 fr4 sita4 tb tb1\n");
printf(" deg N radian N radian N.m N.m ");
printf("\n The Kineto-static Analysis of a Six-bar Linkase\n"); printf(" NO THETA1 fr6 bt6 tb tb1\n");
printf(" (deg.) (N) (deg.) (N.m) (N.m)\n");
if((fp=fopen("sgy2","w"))==NULL)
{
printf("Can't open this file./n");
exit(0);
}
fprintf(fp,"\n The Kineto-static Analysis of a Six-bar Linkase\n"); fprintf(fp,"NO THETA1 FR6 BT6 TB TB1\n" );
fprintf(fp," (deg.) (N) (deg.) (N.m) (N.m)\n" );
ic=(int)(360.0/del);
for(i=0;i<=ic;i++)
{
t[1]=(-i)*del*dr;
bark(1,2,0,1,r12,0.0,0.0,t,w,e,p,vp,ap);
rrrk(-1,2,4,3,2,3,r23,r34,t,w,e,p,vp,ap);
rrrk(1,3,6,5,4,5,r35,r56,t,w,e,p,vp,ap);
bark(2,0,7,2,0.0,r23/2,0.0,t,w,e,p,vp,ap);
bark(4,0,8,3,0.0,r34/2,0.0,t,w,e,p,vp,ap);
bark(3,0,9,4,0.0,r35/2,0.0,t,w,e,p,vp,ap);
bark(6,0,10,5,0.0,r56/2,0.0,t,w,e,p,vp,ap);
bark(6,0,11,5,0.0,r611,0.0,t,w,e,p,vp,ap);
rrrf(3,6,5,9,10,0,11,11,4,5,p,vp,ap,t,w,e,fr);
rrrf(2,4,3,7,8,3,0,0,2,3,p,vp,ap,t,w,e,fr);
barf(1,1,2,1,p,ap,e,fr,&tb);
fr1=sqrt(fr[1][1]*fr[1][1]+fr[1][2]*fr[1][2]);
bt1=atan2(fr[1][2],fr[1][1]);
fr4=sqrt(fr[4][1]*fr[4][1]+fr[4][2]*fr[4][2]);
bt4=atan2(fr[4][2],fr[4][1]);
fr6=sqrt(fr[6][1]*fr[6][1]+fr[6][2]*fr[6][2]);
bt6=atan2(fr[6][2],fr[6][1]);
we1=-(ap[1][1]*vp[1][1]+(ap[1][2]+9.81)*vp[1][2])*sm[1]-e[1]*w[1]*sj[ 1];
we2=-(ap[7][1]*vp[7][1]+(ap[7][2]+9.81)*vp[7][2])*sm[2]-e[2]*w[2]*sj[ 2];
we3=-(ap[8][1]*vp[8][1]+(ap[8][2]+9.81)*vp[8][2])*sm[3]-e[3]*w[3]*sj[ 3];
we4=-(ap[9][1]*vp[9][1]+(ap[9][2]+9.81)*vp[9][2])*sm[4]-e[4]*w[4]*sj[ 4];
extf(p,vp,ap,t,w,e,11,fe);
we5=-(ap[10][1]*vp[10][1]+(ap[10][2]+9.81)*vp[10][2])*sm[5]-e[5]*w[5] *sj[5]+fe[11][1]*vp[11][1]+fe[11][2]*vp[11][2];
tb1=-(we1+we2+we3+we4+we5)/w[1];
printf("%3d %10.3f %10.3f %10.3f %10.3f %10.3f\n",i+1,t[1]/dr,fr6,bt6 /dr,tb,tb1);
fprintf(fp,"%3d %10.3f %10.3f %10.3f %10.3f %10.3f\n",i+1,t[1]/dr,fr6 ,bt6/dr,tb,tb1);
tbdraw[i]=tb;tb1draw[i]=tb1;fr1draw[i]=fr1;sita1[i]=bt1;
fr2draw[i]=fr4;sita2[i]=bt4; fr3draw[i]=fr6;sita3[i]=bt6;
if((i%16)==0){getch();}
}
fclose(fp);
getch();
draw2(del,tbdraw,tb1draw,ic);
draw3(del,sita1,fr1draw,sita2,fr2draw,sita3,fr3draw,ic);
}
#include "math.h"
extf(p,vp,ap,t,w,e,nexf,fe)
double p[20][2],vp[20][2],ap[20][2],t[10],w[10],e[10],fe[20][2]; {
double pi,dr;
pi=4.0*atan(1.0);dr=pi/180.0;
if(w[5]<0)
{
fe[nexf][1]=(-t[1]/dr-90.0)*(85000.0/182.0)*cos(-t[5]-pi/2); fe[nexf][2]=(-t[1]/dr-90.0)*(85000.0/182.0)*sin(-t[5]-pi/2); }
else{fe[nexf][1]=0;fe[nexf][2]=0;}
}
(2)运行结果:
The Kineto-static Analysis of a Six-bar Linkase
NO THETA1 FR6 BT6 TB TB1
(deg.) (N) (deg.) (N.m) (N.m)
1 0.000 9904.580 77.690 534.273 534.273
2 -15.000 10248.086 82.670 1038.104 1038.104
3 -30.000 10522.852 89.576 1434.513 1434.513
4 -45.000 10757.314 97.329 1547.760 1547.760
5 -60.000 10967.175 104.339 1270.987 1270.987
6 -75.000 11112.158 109.009 644.228 644.228
7 -90.000 11132.496 110.330 -144.608 -144.608
8 -105.000 12694.785 130.968 -883.503 -883.503
9 -120.000 15067.304 144.368 -1406.751 -1406.751
10 -135.000 17747.445 153.528 -1623.932 -1623.932
11 -150.000 20694.648 160.499 -1555.124 -1555.124
12 -165.000 24022.489 166.115 -1286.981 -1286.981
13 -180.000 27824.537 170.602 -923.989 -923.989
14 -195.000 32106.137 174.034 -557.444 -557.444
15 -210.000 36785.996 176.536 -253.496 -253.496
16 -225.000 41731.070 178.304 -51.307 -51.307
17 -240.000 46795.855 179.558 36.912 36.912
18 -255.000 51853.137 -179.507 26.634 26.634
19 -270.000 56814.061 -178.745 -39.410 -39.410
20 -285.000 8481.823 78.617 -205.306 -205.306
21 -300.000 8583.465 77.292 -338.729 -338.729
22 -315.000 8793.293 75.658 -361.459 -361.459
23 -330.000 9113.158 74.602 -227.576 -227.576
24 -345.000 9506.210 75.059 80.824 80.824
25 -360.000 9904.580 77.690 534.273 534.273 (3)平衡力矩曲线:
(4)反力的矢端图曲线:
5.2杆铰链式颚式破碎机的动态静力分析。
5.2.1 质点5,6及矿石破碎产生阻力的作用点7的运动参数; ①调用bark 函数对质点5进行运动分析: ②调用bark 函数对质点6进行运动分析: ③调用bark 函数对质点7进行运动分析:
形式参数 n1 n2 n3 k r1
r2 gam
t w e p vp ap 实 值
2
5
2
0.0 r25 0.0
t
w
e
p
vp ap
形式参数 n1 n2 n3 k r1
r2 gam
t w e p vp ap 实 值
4
6
3
0.0 r46 0.0
t
w
e
p
vp ap
形式参数n1 n2 n3 k r1 r2 gam t w e p vp ap 实值 4 0 7 3 0.0 r47 0.0 t w e p vp ap (2)调用rrrf函数对②,③构件构成的RRR杆组进行动态静力分析:
形式参数n1 n2 n3 ns1 ns2 nn1 nn2 nexf k1 实值 2 4 3 5 6 0 7 7 2 形式参数k2 p vp ap t w e fr
实值 3 p vp ap t w e fr
(3)调用barf函数对主动件1进行动态静力分析:
形式参数n1 ns1 nn1 k1 p ap e fr tb
实值 1 1 2 1 p ap e fr &tb
5.2.2主程序并运行。
按一定的步长,改变主动件的位置角度,使其在0-360°变化,便可求出机构各运动副反力及作用在主动件上的平衡力矩。
(1)主程序。
#include "graphics.h"
#include "subk.c"
#include "subf.c"
#include "draw.c"
main()
{
static double p[20][2],vp[20][2],ap[20][2],del;
static double t[10],w[10],e[10];
static double sita1[370],fr1draw[370],sita2[370],fr2draw[370],
sita3[370],fr3draw[370],tbdraw[370],tb1draw[370];
static double fr[20][2],fe[20][2];static int ic;double r12,r23,r34,r47; int i;double pi,dr;double fr1,fr4,bt1,bt4,we1,we2,we3,tb,tb1;
FILE*fp;
sm[1]=0.0;sm[2]=200.0;sm[3]=900.0;sj[1]=0.0;sj[2]=9.0;sj[3]=50.0;
r12=0.04; r23=1.11; r34=1.96,r47=0.6;
pi=4.0*atan(1.0);
w[1]=-170*2*pi/60; e[1]=0.0; del=15.0;dr=pi/180.0;
p[1][1]=0.0;p[1][2]=0.0;p[4][1]=-0.95;p[4][2]=2.0;
printf("\n The Kineto-static Analysis of a four-bar Linkase\n"); printf(" NO THETA1 FR4 BT4 TB TB1\n");
printf(" (deg.) (N) (deg.) (N.m) (N.m)\n");
if((fp=fopen("sgy3","w"))==NULL)
{
printf("Can't open this file./n");
exit(0);
}
fprintf(fp,"\n The Kineto-static Analysis of a four-bar Linkase\n"); fprintf(fp,"NO THETA1 FR4 BT4 TB TB1\n" );
fprintf(fp," (deg.) (N) (deg.) (N.m) (N.m)\n" );
ic=(int)(360.0/del);
for(i=0;i<=ic;i++)
{
t[1]=(-i)*del*dr;
bark(1,2,0,1,r12,0.0,0.0,t,w,e,p,vp,ap);
rrrk(1,2,4,3,2,3,r23,r34,t,w,e,p,vp,ap);
bark(2,0,5,2,0.0,r23/2,0.0,t,w,e,p,vp,ap);
bark(4,0,6,3,0.0,r34/2,0.0,t,w,e,p,vp,ap);
bark(4,0,7,3,0.0,0.6,0.0,t,w,e,p,vp,ap);
rrrf(2,4,3,5,6,0,7,7,2,3,p,vp,ap,t,w,e,fr);
barf(1,1,2,1,p,ap,e,fr,&tb);
fr1=sqrt(fr[1][1]*fr[1][1]+fr[1][2]*fr[1][2]);
bt1=atan2(fr[1][2],fr[1][1]);
fr4=sqrt(fr[4][1]*fr[4][1]+fr[4][2]*fr[4][2]);
bt4=atan2(fr[4][2],fr[4][1]);
we1=-(ap[1][1]*vp[1][1]+(ap[1][2]+9.81)*vp[1][2])*sm[1]-e[1]*w[1]*sj[ 1];
we2=-(ap[5][1]*vp[5][1]+(ap[5][2]+9.81)*vp[5][2])*sm[2]-e[2]*w[2]*sj[ 2];
extf(p,vp,ap,t,w,e,7,fe);
we3=-(ap[6][1]*vp[6][1]+(ap[6][2]+9.81)*vp[6][2])*sm[3]-e[3]*w[3]*sj[ 3]+fe[7][1]*vp[7][1]+fe[7][2]*vp[7][2];
tb1=-(we1+we2+we3)/w[1];
printf("%3d %10.3f %10.3f %10.3f %10.3f %10.3f
\n",i+1,t[1]/dr,fr4,bt4/dr,tb,tb1);
fprintf(fp,"%3d %10.3f %10.3f %10.3f %10.3f %10.3f
\n",i+1,t[1]/dr,fr4,bt4/dr,tb,tb1);
tbdraw[i]=tb;tb1draw[i]=tb1;
fr1draw[i]=fr1;sita1[i]=bt1;
fr2draw[i]=fr4;sita2[i]=bt4;
fr3draw[i]=fr4;sita3[i]=bt4;
if((i%16)==0){getch();}
}
fclose(fp);
getch();
draw2(del,tbdraw,tb1draw,ic);
draw3(del,sita1,fr1draw,sita2,fr2draw,sita3,fr3draw,ic);
}
#include "math.h"
extf(p,vp,ap,t,w,e,nexf,fe)
double p[20][2],vp[20][2],ap[20][2],t[10],w[10],e[10],fe[20][2]; {
double pi,dr;
pi=4.0*atan(1.0);
dr=pi/180.0;
if(w[3]<0)
{
fe[nexf][1]=(-t[1]/dr-3/dr)*(85000.0/181.0)*cos(-t[3]-pi/2);
fe[nexf][2]=(-t[1]/dr-3/dr)*(85000.0/181.0)*sin(-t[3]-pi/2);
}
else{fe[nexf][1]=0;fe[nexf][2]=0;}
}
(2)运行结果:
The Kineto-static Analysis of a four-bar Linkase
NO THETA1 FR4 BT4 TB TB1
(deg.) (N) (deg.) (N.m) (N.m)
1 0.000 10261.396 102.685 47.546 47.546
2 -15.000 51448.370 17.786 186.094 186.094
3 -30.000 46996.739 19.370 316.446 316.446
4 -45.000 42725.338 21.193 402.027 402.027
5 -60.000 38603.813 23.247 446.798 446.798
6 -75.000 34590.628 25.540 455.194 455.194
7 -90.000 30637.112 28.117 431.327 431.327
8 -105.000 26695.709 31.108 379.118 379.118
9 -120.000 22733.412 34.813 303.360 303.360
10 -135.000 18753.920 39.876 211.317 211.317
11 -150.000 14843.055 47.694 114.117 114.117
12 -165.000 11289.242 61.310 27.042 27.042
13 -180.000 8894.730 85.799 -32.028 -32.028
14 -195.000 9702.566 70.652 -75.371 -75.371
15 -210.000 9538.373 72.140 -106.622 -106.622
16 -225.000 9408.540 74.864 -112.809 -112.809
17 -240.000 9336.371 78.581 -90.324 -90.324
18 -255.000 9335.572 82.915 -43.909 -43.909
19 -270.000 9405.058 87.439 15.069 15.069
20 -285.000 9529.828 91.754 72.279 72.279
21 -300.000 9687.086 95.554 114.547 114.547
22 -315.000 9853.708 98.638 133.092 133.092
23 -330.000 10011.499 100.889 125.150 125.150
24 -345.000 10149.104 102.245 93.963 93.963
25 -360.000 10261.396 102.685 47.546 47.546 (3)平衡力矩曲线:
(4)反力的矢端图曲线:
六.工艺阻力函数及飞轮的转动惯量函数
6.1工艺阻力函数程序:
(1)六杆铰链式颚式破碎机的工艺阻力函数程序:
#include "math.h"
extf(p,vp,ap,t,w,e,nexf,fe)
double p[20][2],vp[20][2],ap[20][2],t[10],w[10],e[10],fe[20][2]; {
double pi,dr;
pi=4.0*atan(1.0);dr=pi/180.0;
if(w[5]<0)
{
fe[nexf][1]=(-t[1]/dr-90.0)*(85000.0/182.0)*cos(-t[5]-pi/2);
fe[nexf][2]=(-t[1]/dr-90.0)*(85000.0/182.0)*sin(-t[5]-pi/2);
}
else{fe[nexf][1]=0;fe[nexf][2]=0;}
}
(2)四杆铰链式颚式破碎机的工艺阻力函数程序
#include "math.h"
extf(p,vp,ap,t,w,e,nexf,fe)
double p[20][2],vp[20][2],ap[20][2],t[10],w[10],e[10],fe[20][2]; {
double pi,dr;
pi=4.0*atan(1.0);
dr=pi/180.0;
if(w[3]<0)
{
fe[nexf][1]=(-t[1]/dr-3/dr)*(85000.0/181.0)*cos(-t[3]-pi/2);
fe[nexf][2]=(-t[1]/dr-3/dr)*(85000.0/181.0)*sin(-t[3]-pi/2);
}
else{fe[nexf][1]=0;fe[nexf][2]=0;}
}
6.2 飞轮转动惯量函数程序
6.2.1六杆铰链式颚式破碎机的转动惯量函数程序
#include "graphics.h"
#include "subk.c"
#include "subf.c"
#include "draw.c"
static double sm[10],sj[10];
main()
{
static double p[20][2],vp[20][2],ap[20][2],del;
static double t[10],w[10],e[10],Tr[370],D[370];
static double fr[20][2],fe[20][2];static int ic;
double r12,r23,r34,r35,r56,r611,tb,tb1;
double Td,sum1=0.0,E[370],Max=0.0,Min=0.0,Jf=0.0,q;int i,j;
double pi,dr,fr1,bt1,fr2,bt2;
FILE*fp;
sm[1]=0.0;sm[2]=500.0;sm[3]=200.0;sm[4]=200.0;sm[5]=900.0;
sj[1]=0.0;sj[2]=25.5;sj[3]=9.0;sj[4]=9.0;sj[5]=50.0;
r12=0.1; r23=1.25; r34=1.0; r35=1.15;r56=1.96,r611=0.6,del=15.0;
pi=4.0*atan(1.0);w[1]=-170*2*pi/60; e[1]=0.0;dr=pi/180.0;
q=0.3;
p[1][1]=0.0;p[1][2]=0.0;p[4][1]=0.94;p[4][2]=-1.0;p[6][1]=-1.0;
p[6][2]=0.85;
printf("\n The Kineto-static Analysis of a Six-bar Linkase\n"); printf(" NO THETA1 fr1 bt1 fr4 bt4 tb tb1\n"); printf(" (deg.) (N) (deg.) (N) (deg.) (N.m) (N.m)\n"); if((fp=fopen("zhuan6","w"))==NULL)
{
printf("Can't open this file./n");
exit(0);
}
printf(fp,"\n The Kineto-static Analysis of a Six-bar Linkase\n"); printf(fp,"NO THETA1 fr1 bt1 fr4 bt4 tb tb1\n" );
printf(fp," (deg.) (N) (deg.) (N) (deg.)
(N.m)(N.m)\n" );
ic=(int)(360.0/del);
for(i=0;i<=ic;i++)
{
t[1]=(-i)*del*dr;
bark(1,2,0,1,r12,0.0,0.0,t,w,e,p,vp,ap);
rrrk(-1,2,4,3,2,3,r23,r34,t,w,e,p,vp,ap);
rrrk(1,3,6,5,4,5,r35,r56,t,w,e,p,vp,ap);
bark(2,0,7,2,0.0,r23/2,0.0,t,w,e,p,vp,ap);
bark(4,0,8,3,0.0,r34/2,0.0,t,w,e,p,vp,ap);
bark(3,0,9,4,0.0,r35/2,0.0,t,w,e,p,vp,ap);
bark(6,0,10,5,0.0,r56/2,0.0,t,w,e,p,vp,ap);
bark(6,0,11,5,0.0,r611,0.0,t,w,e,p,vp,ap);
rrrf(3,6,5,9,10,0,11,11,4,5,p,vp,ap,t,w,e,fr);
rrrf(2,4,3,7,8,3,0,0,2,3,p,vp,ap,t,w,e,fr);
barf(1,1,2,1,p,ap,e,fr,&tb);
Tr[i]=tb; D[i]=t[1];
}
机械原理课程设计,详细
目录 一、设计题目 (2) 1、牛头刨床的机构运动简图 (2) 2、工作原理 (2) 二、原始数据 (3) 三、机构的设计与分析 (4) 1、齿轮机构的设计 (4) 2、凸轮机构的设计 (10) 3、导杆机构的设计 (16) 四、设计过程中用到的方法和原理 (26) 1、设计过程中用到的方法 (26) 2、设计过程中用到的原理 (26) 五、参考文献 (27) 六、小结 (28)
一、设计题目 ——牛头刨床传动机构 1、牛头刨床的机构运动简图 2、工作原理 牛头刨床是对工件进行平面切削加工的一种通用机床,其传动部分由电动机经 带传动和齿轮传动z 0—z 1 、z 1 、—z 2 ,带动曲柄2作等角速回转。刨床工作时,由导 杆机构2、3、4、5、6带动刨刀作往复运动,刨头右行时,刨刀进行切削,称为工 作行程;刨头左行时,刨刀不进行切削,称为空回行程,刨刀每切削完一次,利用 空回行程的时间,固结在曲柄O 2 轴上的凸轮7通过四杆机构8、9、10与棘轮11和棘爪12带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
二、原始数据 设计数据分别见表1、表2、表3. 表1 齿轮机构设计数据 设计内容齿轮机构设计 符号n01d01 d02 z0 z1 z1’m01 m1’2n2 单位r/min mm mm mm mm r/min 方案Ⅰ1440 100 300 20 40 10 3.5 8 60 方案Ⅱ1440 100 300 16 40 13 4 10 64 方案Ⅲ1440 100 300 19 50 15 3.5 8 72 表2 凸轮机构设计数据 设计内容凸轮机构设计 符号L O2O4 L O4D φ[α]δ02 δ0 δ01δ0/ r0 r r 摆杆运动规 律单位mm mm °°°°°°mm mm 方案Ⅰ150 130 18 45 205 75 10 70 85 15 等加速等减 速 方案Ⅱ165 150 15 45 210 70 10 70 95 20 余弦加速度方案Ⅲ160 140 18 45 215 75 0 70 90 18 正弦加速度方案Ⅳ155 135 20 45 205 70 10 75 90 20 五次多项式 表3 导杆机构设计数据 设计内容导杆机构尺度综合和运动分析 符号K n2L O2A H L BC 单位r/min mm 方案Ⅰ 1.46 60 110 320 0.25L O3B 方案Ⅱ 1.39 64 90 290 0.3L O3B 方案Ⅲ 1.42 72 115 410 0.36L O3B 表4 机构位置分配表 位置号位置 组 号 学生号 A B C D 1 1 3 6 8/ 10 2 5 8 10 7/ 1/ 4 7 8 10 1 5 7/ 9 12 2 1/ 4 7 8 11 1 3 6 8/ 11 2 5 7/ 9 11 1/ 3 6 8/ 11 3 2 5 7/ 9 12 1/ 4 7 9 12 1 3 6 8/ 12 2 4 7 8 10
颚式破碎机设计说明书 (2)
目录 一、概述 (1) 二、工作原理 (1) 三、结构分析 (2) 四、设计数据 (2) 五、机构的运动位置分析 (3) 六、机构的运动速度分析 (4) 七、机构运动加速度分析 (5) 八、静力分析 (6) 九、与其他结构的对比 (7) 十、设计总结 (9)
一、概述 破碎机械是对固体物料施加机械力,克服物料的内聚力,使之碎裂成小块物料的设备。破碎机械所施加的机械力,可以是挤压力、劈裂力、弯曲力、剪切力、冲击力等,在一般机械中大多是两种或两种以上机械力的综合。对于坚硬的物料,适宜采用产生弯曲和劈裂作用的破碎机械;对于脆性和塑性的物料,适宜采用产生冲击和劈裂作用的机械;对于粘性和韧性的物料,适宜采用产生挤压和碾磨作用的机械。在矿山工程和建设上,破碎机械多用来破碎爆破开采所得的天然石料,使这成为规定尺寸的矿石或碎石。在硅酸盐工业中,固体原料、燃料和半成品需要经过各种破碎加工,使其粒度达到各道工序所要求的以便进一步加工操作。 二、工作原理 图(一) 如图(一)所示,1 颚式破碎机是一种用来破碎矿石的机械,机器经带传动,使曲柄2 顺时针方向回转,然后通过构件3,4,5 使动颚板 6 作往复摆动,当动颚板 6 向左摆向固定于机架1 上的定额板7 时,矿石即被轧碎;当动颚板6 向右摆离定颚板7 时,被轧碎的矿石即下落。根据生产工艺路线方案,在送料机构送料期间,动颚板6 不能向左摆向定颚板7,以防止两颚板不能破碎矿石,只有当送料完成时,两颚板才能加压破碎。因此,必须对送料机构和颚板6、颚板7 之间的运动时间顺序进行设计,使三者有严格的协调配合关系,不致在运动过程发生冲突。 由于机器在工作过程中载荷变化很大,将影响曲柄和电机的匀速转动,为了减小主轴速度的波动和电动机的容量,在曲柄轴O2的两端各装一个大小和重量完全相同的飞轮,其中一个兼作皮带轮用。
机械设计说明书撰写要求
机械产品设计说明书的撰写规范要求 一、说明书的撰写内容与要求 1 标题(题目):设计课题的名称,要求简洁、确切、鲜明。为区分大题目下的不同设计内容,可增加副标题。 2 任务书:应说明机械产品设计的教学目的和任务要求;扼要叙述本设计的主要内容、特点、主要结论及创新之处,文字要精练。 3 目录(目次页):设计说明书目录中的章节按三级目录排列,章节编号依次为第1章;1.1;1.1.1。 4 概述:作为第一章,对设计题目进行简要说明,并说明本设计的目的、意义、范围及达到的技术要求;简述本课题在国内外发展概况及存在的问题;最后一节应说明本设计的主要任务。 5 正文说明书的正文要阐述整个设计内容,包括方案选择、设计计算过程和说明、结构设计、主要零部件的设计选择、必要的机构运动简图、零件结构图等全部内容。正文内容和页码要与目录中的章节目录、页次相对应,三级题目不够时,可继续向下排,如:1.1.1.1;(1);①;a、b、c…等。 6 结论:作为说明书的最后一章,概括说明本设计的情况和价值,分析其优点、特色,有何创新,性能达到何水平,并应指出其中存在的问题和今后改进的方向。 7 参考文献:设计中曾经查阅的相关文献。注意按顺序编号并按正确格式一一列出。 8 附录:与设计有关的各种篇幅较大的图纸、数据表格、计算机程序、运行结果、主要设备、仪器仪表的性能指标和测试结果等。注意分别按顺序编号。 9 致谢:简述自己的设计体会,并应对指导教师和协助完成设计的有关人员表示谢意。 二、说明书的编辑与打印 1设计说明书一律使用A4复印纸打印,难以用计算机处理的插图和曲线,可以用手工绘制,但必须绘制在打印的A4纸的空白处或单页上,页码必须打印。 2 目录格式:采用三级目录,使用自动生成目录,目录生成后和文本一样可以编辑。章目录采用四号宋体加黑,节、目采用小四号宋体,页码连接符用Arial字体,不要加黑。行距为固定值22磅。章、节、目每一级别右缩进一个中文字符(自动生成),编排要美观,如下图框所示。 2、说明书(论文)格式 (1)文字要求:正文文字内容字体一律采用宋体,标题为黑体,章题目用小三号字,节标题用四号字,目标题用小四号字。内容汉字采用小四号宋体,英文采用四号Time New Roman字体。 (2)每章标题下空一个标准行,节标题和目标题行设臵为:段前、段后均为0.5行,紧接表格后的文字设臵为段前行0.5行。 (3)页面设臵:使用单面打印,上2.5cm,下2.5cm,左2.5cm,右2.0cm (4)页眉设臵:居中以小五号宋体字键入“河北工程大学机电工程学院机械产品设计说明书”。 (5)页脚设臵:插入页码,居中。 (6)正文选择格式段落:最小值,20~22磅;段前、段后均为0行。
831002拨叉课程设计说明书工序卡片工艺过程卡片全部
课程设计说明书题目: 设计拨叉(CA6140车床)零件的机械加工工艺规程以及加工装备 学院: 专业班级: 学生姓名: 学号: 指导老师: 年月日
一、参考资料 (1)、设计工作量: 1、分析零件技术要求,绘制零件图、毛坯图; 2、设计零件机械加工工艺过程,填写工艺文件(工艺过程卡和工序卡); 3、设计零件机械加工工艺装备(夹具),绘制夹具装配图及一个主要零件 的零件图; 4、编写设计说明书。 (2)、主要参考资料: 1、段明扬主编,现代机械制造工艺设计实训教程,桂林:广西师范大学出版社,2007 2、李益明主编,机械制造工艺设计简明手册,北京:机械工业出版社,2007 3、艾兴等编,切削用量简明手册,北京:机械工业出版社,2002 4、东北重型机械学院等编,机床夹具设计手册,上海:上海科技出版社,1990 5、邹青主编,机械制造技术基础课程设计指导教程,北京:机械工业出版社, 2004 6、段明扬主编,现代制造工艺设计方法,桂林:广西师范大学出版社,2007 7、崇凯主编,机械制造技术基础课程设计指南,北京:化学工业出版社,2007 8、华楚生主编,机械制造技术基础,重庆:重庆大学出版社,2011 9、赵家齐主编,机械制造工艺学课程设计指导书,北京:机械工业出版社,2000
目录 一、参考资料 (2) 二、设计内容 (3) 三、零件分析 (3) (一)零件的作用 (4) (二)零件的工艺分析 (4) 四、确定毛坯的制造方法,初步确定毛坯的形状 (4) 五、工艺规程的设计 (5) (一)定位基准的选择 (5) (二)零件表面加工方法的选择 (5) (三)制订工艺路线 (6) (四)确定机械加工余量、工序尺寸及毛坯尺寸,设计、绘制 毛坯图 (9) (五)确定切削用量及基本工时(机动时间) (12) 六、夹具的设计 (30) (一)定位基准的选择 (30) (二)切削力及夹紧力的计算 (31) (三)定位误差分析 (31) (四)夹具设计及操作的简要说明 (31) 七、设计感言 (32) 二、设计内容 设计题目:设计拨叉(CA6140车床)零件的机械加工工艺规程及机床夹具。拨叉(CA6140车床)的拨叉零件图、拨叉毛坯图、夹具装配图、夹具零件图见附件。
块状物品推送机机械原理课程设计
机械原理课程设计说明书设计题目:块状物品推送机的机构综合与结构设计 班级: 姓名: 学号: 同组成员: 组长: 指导教师: 时间: 一、设计题目 (2) 二、设计数据与要求 (2) 三、设计任务 (3) 四、方案设计 (4) 1.凸轮连杆组合机构 (4) 2.凸轮机构 (5) 3.连杆机构 (6)
4.凸轮齿轮组合机构 (7) 五、方案尺寸数据及发动机参数 (7) 六、运动分析 (8) 1.位移分析 (8) 2.速度分析 (9) 3.加速度分析 (10) 七、飞轮设计 (11) 八、个人总结 (12) 一、设计题目 在自动包裹机的包装作业过程中,经常需要将物品从前一工序转送到下一工序。现要求设计一用于糖果、香皂等包裹机中的物品推送机,将块状物品从一位置向上推送到所需的另一位置,如图所示。 二、设计数据与要求 1.向上推送距离H=120mm,生产率为每分钟推送 物品120件。 2.推送机的原动机为同步转速为3000转/分的三
相交流电动机,通过减速装置带动执行机构主动件等速转动。 3.由物品处于最低位置时开始,当执行机构主动件转过1500时,推杆从最 低位置运动到最高位置;当主动件再转过1200时,推杆从最高位置又回 到最低位置;最后当主动件再转过900时,推杆在最低位置停留不动。 4.设推杆在上升运动过程中,推杆所受的物品重力和摩擦力为常数,其值 为500N;设推杆在下降运动过程中,推杆所受的摩擦力为常数,其值 为100N。 5.使用寿命10年,每年300工作日,每日工作16小时。 6.在满足行程的条件下,要求推送机的效率高(推程最大压力角小于350), 结构紧凑,振动噪声小。 三、设计任务 1.至少提出三种运动方案,然后进行方案分析评比,选出一种运动方案进 行机构综合。 2.确定电动机的功率与满载转速。 3.设计传动系统中各机构的运动尺寸,绘制推送机的机构运动简图。 4.在假设电动机等速运动的条件下,绘制推杆在一个运动周期中位移、速 度和加速度变化曲线。 5.如果希望执行机构主动件的速度波动系数小于3%,求应在执行机构主动 件轴上加多大转动惯量的飞轮。 6.进行推送机减速系统的结构设计,绘制其装配图和两张零件图。 7.编写课程设计说明书。
500750颚式破碎机说明书(DOC)
目录 1、前言 1 2、主要技术参数 1 3、结构简述及装配 1 4、安装、调整和试车 5 5、使用与维护7 6、安全操作规程9 7、必须注意的事项9 8、易损件明细表10 9、PE-500*750颚式破碎机基础图11
1、前言 本说明书是为安装操作和维护复摆颚式破碎机的用户和现场操作人员编写的。本资料将帮助你熟悉破碎机的结构,并为安全操作和维护提供必要的常识。 在安装破碎机之前和破碎机运转期间,必须阅读和理解本说明书的内容,并付诸实施。 本破碎机适用于粗碎、中碎抗压强度不大于320Mpa的各种矿石或岩石。 2、主要技术参数 给料口尺寸(宽*长)500×750 mm 排料口宽度50~100 mm 最大进料尺寸425 mm 主轴转速275 mm 生产能力45~100 mm 电动机功率55 kw 外形尺寸(长×宽×高)1916×1890×1870 mm 重量(不包括电机)10.1 t 注:破碎机的生产能力受各种因素的影响,诸如给料方式、物料的形状、粒度组成、物料的干、湿、软、硬程度等等。对于硬而脆的物料要比硬而韧的物料容易破碎;片状物料要比球状物料容易破碎;由大小不同粒度组成的混合料要比单一大粒度组成的物料容易破碎,能获得较高的处理能力。相反,如果物料超过最大允许的进料粒度或者进料口堆满物料而出现阻塞现象时,往往就导致处理能力的降低。 为了提高本机的处理能力和使用寿命,必须满足其均衡进料的要求。因
此在使用本机时需由喂料机与之配套。 本机标定的性能参数是以破碎干且中等硬度的岩石为准,其堆比重为1.6吨/立方米。 3、结构简述及装配 本机主要由:机架部件、上边护板、下边护板、动颚部件、调整部件、拉杆部件、铁轨部件、润滑部件、电控部分等组成。 本机是以电动机为动力,通过电动机皮带轮,由三角皮带和槽轮驱动偏心轴,使动颚按预定轨迹作往复活动,从而将进入由固定颚板、活动颚板和边护板组成的破碎腔内的物料予以破碎,并通过下部的排料口将成品物料排出。 3.1机架部件 颚式破碎机的机架,在工作中受到很大的冲击载荷。因此它应具有足够的强度和刚度。 机架为焊接件(见图1)。机架的前墙装有固定颚板螺钉紧固的固定颚板,
《东北大学机械基础课程设计》设计说明书
机械设计基础课程设计计算说明书 题目:设计胶带输送机的传动装置 班级:冶金工程1103 姓名:马林林 学号:20110075 指导教师: 成绩: 2013 年07 月07 日
1、设计内容 1.1设计题目 1.2工作条件 1.3技术条件 2、传动装置总体设计 2.1电动机选择 2.2分配传动比 2.3传动装置的运动和动力参数计算 3、传动零件设计计算以及校核3.1减速器以外的传动零件设计计算 3.2减速器内部传动零件设计计算 4、轴的计算 4.1初步确定轴的直径 4.2轴的强度校核 5、滚动轴承的选择及其寿命验算5.1初选滚动轴承的型号 5.2滚动轴承寿命的胶合计算 6、键连接选择和验算 7、连轴器的选择和验算
kw w 30.3=
一对滚动轴承效率 η2=0.99 闭式齿轮的传动效率 η3=0.97(8级) 开式滚子链传动效率 η4=0.92 一对滑动轴承的效率 η5=0.97 传动滚筒的效率 η6=0.96 8063 .096.097.092.097.099.099.026 5432 21=?????=?????=ηηηηηηη 8063.0=η (3)所需的电动机的功率 Kw p p w r 09.48063 .030.3=== η Kw p r 09.4= 即Pr=4.09kw 查表2-18-1可选的Y 系列三相异步电动机Y132M2-6型, 额定kw P 5.50=。满足r P P >0,其主要性能见表。 2.1.3确定电动机转速 传动滚筒转速 min /4.102280 1000 5.16060w r D v n =???==ππ 现以同步转速为Y132S-4型(1500r/min ) 及Y132M2-6 型(1000r/min )两种方案比较,查得电动机数据 使传动装置结构紧凑,选用方案2。电动机型号为Y132M2-6。 由表2-18-1和表2-18-2查得其主要性能技术数和安装尺寸 数据列于下表
CA6140车床拨叉831007课程设计说明书
2、设计具体内容 2.1、零件的作用 题目所给的零件是CA6140车床的拨叉。它位于车床变速机构中,主要起换档,使主轴回转运动按照工作者的要求工作,获得所需的速度和扭矩的作用。零件上方的φ22孔与操纵机构相连,而下方的φ55mm 半孔则是用于与所控制齿轮所在的轴接触。通过上方的力拨动下方的齿轮变速。两件零件铸为一体,加工时分开。 2.2、零件的工艺分析 零件的材料为HT200,灰铸铁生产工艺简单,铸造性能优良,但塑性较差、脆性高,不适合磨削,为此以下是拨叉需要加工的表面以及加工表面之间的位置要求: 1)需要加工的表面: a.小孔的上端面、大孔的上下端面; b.小头孔0.021 22+-Φmm 以及与此孔相通的8Φmm 的锥孔、8M 螺纹孔; c.大头半圆孔55Φmm ; 2)位置要求: 小头孔上端面与小头孔中心线的垂直度误差为0.05mm 、大孔的上下端面与小头孔中心线的垂直度误差为0.07mm 。 由上面分析可知,可以粗加工拨叉底面,然后以此作为粗基准采用专用夹具进行加工,并且保证位置精度要求。再根据各加工方法的经济精度及机床所能达到的位置精度,并且此拨叉零件没有复杂的加工曲面,所以根据上述技术要求采用常规的加工工艺均可保证。 2.3、 工艺规程设计 2. 3.1、确定毛坯的制造形式 零件材料为HT200。考虑到零件在机床运行过程中所受冲击不大,零件结构又比较简单,生产类型为大批生产,故选择铸件毛坯。选用铸件尺寸公差等级CT9级,已知零件的质量是1.0Kg/个,所以初步确定工艺安排为:加工过程工序划分阶段;工序适当集中;加工设备以通用设备为主,大量采用专用工装。 2.3.2、基面的选择
机械原理课程设计+例题实例
《机械原理》课程设计 计算说明书 设计题目:健身球检验分类机 院校:武汉大学东湖分校工学院 专业:机械设计制造及其自动化 班级:2005级(1)班 设计者:方旭东 学号:2 指导老师:张荣 日期:2009年1月6日 目录 设计任务书············································ 设计方案说明·········································· 一、设计要求·········································· 二、方案确定·········································· 三、功能分解·········································· 四、选用机构·········································· 五、机构组合设计······································ 六、运动协调设计······································ 七、圆柱直齿轮设计····································
八、方案评价·········································· 参考文献··············································· 设计小结··············································· 方案设计说明 一.设计要求 设计健身球自动检验分类机,将不同直径尺寸的健身球按直径分类。检测后送入各自指定位置,整个工作过程(包括进料、送料、检测、接料)自动完成。 健身球直径范围为ф40~ф46mm,要求分类机将健身球按直径的大小分为三类。 1. ф40≤第一类≤ф42 2. ф42<第二类≤ф44 3. ф44<第三类≤ф46 电机转速:720r/min,生产率(检球速度)20个/min。 二.方案确定 初选了三种设计方案,如下: 方案一:
颚式破碎机使用说明书
郑州市鑫运重工科技有限公司 颚 式 破 碎 机 使 用 说 明 书 电话:2 传真:86-7 邮箱:网址:
目录 1.敬告用户 (1) 2.产品特点 (1) 3.产品用途 (1) 4.常用颚式破碎机的规格和技术参数 (2) 5.结构简述及装配 (3) 6.颚破的安装、操作和维修 (10)
一、敬告客户 为了确保本机正常工作,充分发挥本机应有的性能,希望使用单位在使用本机之前首先熟悉本机说明书,并按照说明书技术要求进行操作。 因产品技术性能不断优化,其技术参数的改进恕不另行通知,谨此致歉。 机器开机之前不能加料;机器停机之前将料出完。 二、产品特点 破碎比大结构简单工作可靠维护方便 三、产品用途 PE(X)系列复摆颚式破碎机,广泛用于各种硬脆的非金属矿石、熔渣、炉渣、建筑石料、大理石等抗压强度不超过320兆帕的大块物料的中等粒度破碎。破碎比可达4-6,且产品粒度均匀。可广泛应用于矿山、冶炼、建材、公路、铁路、水利和化学工业等众多行业。 项目型号进料口 尺寸 (mm) 最大进料 边长 (mm) 出料口可 调节范围 (mm) 产量 (t/h) 电机 功率 (kw) 重量 (t) 外形 尺寸 (mm) PE400×600400×60035040-10015-6030-371700×1732×1653 PE500×750500×75042550-10040-10045-552035×1921×2000 PE600×900600×90048065-16060-14055-752290×2206×2370 PE750×1060750×106063080-15080-23090-110292655×2302×3110 PE900×1200900×120075095-165140-320110-1323789×3050×3025 PE1000×12001000×1200850105-185180-400160-2003900×3320×3280 PEX250×1000250×100021025-6015-5030-371964×1550×1380 PEX250×1200250×120021025-6020-6037-452192×1605×1415
舞台机械设计说明
舞台机械设计说明 一、工程概况 1.1工程名称: 1.2项目名称: 1.3建设单位: 1.4建设地点: 二、设计依据 2.1《剧场建筑设计规范》J G J57-2000 2.2《剧场舞台用大幕机械装置》Z B J80017-89 2.3《舞台和影视用吊杆装置》Z B J90011-99 2.4《舞台和影视吊杆装置》Q/321284J D E/01-1999 2.5《建筑与建筑群综合布线系统工程规范》 C E C S72-95 2.6《焊缝_工作位置_倾角和转角的定义》 G B T16672-1996 2.7《钢结构防腐涂装工艺标准》G B508-1996 2.8《舞台机械台上设备安全》W H T28-2007 2.9《纺织物燃烧性能测定垂直法》G B5455-852.10《窗帘幕布类纺织物材料》B1防火标准 G B8624-1997 三、设计的内容 ???道灯杆等等。。。。 四、设计思想 舞台机械最重要的指标之一是安全可靠,所 有种类的舞台机械都必须保证在任何时候是绝对 安全可靠的。 对舞台机械的可靠性设计,目前研究的很多。可靠性设计理论是建立在大量实验数据基础上的,不同的使用场合要求不同的可靠度,设备的可靠 性是根据其重要程度、工作要求和维修难易等方 面的因素综合考虑决定的。舞台机械的使用率不高,载荷率较低,对寿命设计有一定要求,而对 可靠性设计则要求很高,因为一旦出现问题就可 能造成严重的安全事故或较大的经济损失。舞台 机械必须有较高的可靠性,其失效概率应在 0.1~1.0%之间。尚无具体应。研究表明,虽然只 用安全系数不能完全反映可靠性水平,但在舞台
机械零部件设计中将各参数作为随机变量处理, 尚缺乏足够的数据。所以,将设计参数作为确定量,用强度安全系数或许用应力作为判别依据, 通过选取适当的安全系数来近似控制其工作可靠 性的要求,仍然是当前舞台机械设计的主导方法。由于计算结果与实际情况有一定偏差,故必须使 计算允许的零部件的承载能力有必要的安全裕量,这就是确定安全系数的基本出发点。通常,舞台 机械还应提出设计寿命指标。以工作年限为单位 的寿命指标对舞台机械并不适用,而以工作小时 计的寿命更符合实际,8000~10000小时的工作寿 命应当是舞台机械设计的基础数据。 舞台机械的安全性指标主要包括设备安全、人 身安全和电气安全等三方面,而且,这三个因素 相互关联、相互影响,有时是不可分割的。 设备安全是指:舞台机械设备在规定的工作条件 下长期使用不产生意外事故的能力;在发生临时 故障时能在降低后的技术参数下继续工作的能力;舞台机械设备对非正常工作状态的感知、显示和报警的能力。这种能力或性能通常是由机械设计 本身和电气控制共同完成的;考虑在演出中尽快 能排除舞台机械的临时故障的能力,使舞台机械 的故障尽量能不影响演出的正常进行。 涉及设备安全的因素很多,主要有以下几个方面:1.足够的安全系数 所有机械零部件的选择和设计必须保证在额 定载荷和惯性载荷的联合作用下,能可靠的工作 并有一定的安全储备,即有足够的安全系数。安 全系数定义为:所有材料的极限应力与零件的最大工作应力之比。零件的最大工作应力应考虑最 大静载荷及动载荷(紧急启制动、碰撞等惯性载荷)作用下产生的应力。例如:悬挂重物或牵引用的钢丝绳,其安全系数应大于或等于10;起重链的安全系数应大于或等于12;传动链的安全系数应大于或等于10;所有传动系统的部件在选用时应能承受两倍的额定载荷;初略计算时,传动件和受力件的安全系数应大于或等于6,精确计算时其安全系数应符合有关标准或规范对该类零件
拨叉设计说明书DOC
机械制造技术基础课程设计 说明书 设计题目:设计拨叉零件的机械加工 工艺规程及工艺装备 设计者 指导教师
前言 通过机床工艺及夹具设计,汇总所学专业知识如一体(如《公差于配合》、《机械零件设计》、《金属切削机床》、《机械制造工艺》等)。让我们对所学的专业课得以巩固、复习及实用,在理论与实践上有机结 合;使我们对各科的作用更加深刻的熟悉与理解,并为以后的实际工 作奠定坚实的基础! 在些次设计中我们主要是设计拨叉的铣床夹具。在此次课程设计 过程中,我小组成员齐心协力、共同努力完成了此项设计。在此期间 查阅了大量的书籍,并且得到了有关老师的指点,在此表示感谢!
一.设计的目的: 机械制造工艺学课程设计,是在学完机械制造工艺学及夹具设计 原理课程,经过生产实习取得感性知识后进行的一项教学环节;在老 师的指导下,要求在设计中能初步学会综合运用以前所学过的全部课程,并且独立完成的一项工程基本训练。同时,也为以后搞好毕业设 计打下良好基础。通过课程设计达到以下目的: 1、能熟练的运用机械制造工艺学的基本理论和夹具设计原理的知识,正确地解决一个零件在加工中的定位,夹紧以及合理制订工艺规 程等问题的方法,培养学生分析问题和解决问题的能力。 2、通过对零件某道工序的夹具设计,学会工艺装备设计的一般方法。通过学生亲手设计夹具(或量具)的训练,提高结构设计的能力。 3、课程设计过程也是理论联系实际的过程,并学会使用手册、查 询相关资料等,增强学生解决工程实际问题的独立工作能力。 二.零件的分析 (一)、零件的作用:题目给定的零件是拨叉(见附图1)它位于车床变速机构中,主要起换档,使主轴回转运动按照工作者的要求进行工作。宽度为18+0.0120mm的槽尺 寸精度要求很高,因为在拨叉拔动使滑 移齿轮时如果槽的尺寸精度不高或间隙 很大时,滑移齿轮得不到很高的位置精 度。所以,宽度为18+0.0120mm的槽和滑 移齿轮的配合精度要求很高。
【精品毕设】机械原理课程设计实例详解(包括源程序)
机械原理课程设计说明书课题名称:新型窗户启闭装置 学院:机电工程学院 专业:机械电子工程 班级:09级01班 小组成员: 指导老师: 课题工作时间:2011.9.1至2011.9.10
前言 机械原理课程设计是使学生较全面、系统巩固和加深机械原理课程的基本原理和方法的重要环节,是培养学生“初步具有确定机械运动方案,分析和设计机械的能力”及“开发创新能力”的一种手段。其目的是: 1) 以机械系统运动方案设计与拟定为结合点,把机械原理课程中分散于各章的理论和方法融会贯通起来,进一步巩固和加深学生所学的理论知识。 2) 使学生能受到拟定机械运动方案的训练,具有初步的机构选型与组合和确定运动方案的能力。 3) 使学生在了解机械运动的变换与传递及力传递的过程中,对机械的运动、动力分析与设计有一个较完整的概念。 4) 进一步提高学生运算、运用流行软件编写应用程序和技术资料的能力。 5) 通过编写说明书,培养学生表达、归纳、总结和独立思考与分析的能力。 要达到课程设计的目的,必须配以课程设计的具体任务:按照选定的机械总功能要求,分解成分功能,进行机构的选型与组合;设计该机械系统的几种运动方案,对各运动方案进行对比和选择;对选定方案中的机构——连杆机构、凸轮机构、齿轮机构,其他常用机构,组合机构等进行运动分析与参数设计;通过计算机编程,将机构运动循环图在计算机屏幕上动态地显示出来,并给出相应的运动参数值。 机械原理课程设计的主要方法,是采用解析法建立求解问题的数学模型,在此基础上应用目前流行的可视化编程语言(如:VB)编写求解程序,显示所设计机构的运动图形、运动参数值及机构仿真。 摘要:本次课程设计运用解析法建立了所设计的六杆机构的运动特性数学模型,利用Matlab运动仿真求出各铰接点和杆件的运动变化情况。然后基于Visual Basic程序设计运动仿真,绘出相应铰接点运动特性曲线,并将用解析法基于Matlab环境下运行的结果与Visual Basic程序设计仿真运动值进行比较。进
机械设计课程设计说明书
c:\iknow\docshare\data\cur_work\https://www.360docs.net/doc/3218398741.html,\
设计人: 二 0 10 年一月 目录 一. 设计任务 二. 传动方案的分析与拟定 三. 电动机的选择
四. 传动比的分配及动力学参数的计算 五. 传动零件的设计计算 六. 轴的设计计算 七. 键的选择和计算 八 . 滚动轴承的选择及计算 九. 连轴器的选择 十. 润滑和密封方式的选择,润滑油的牌 号的确定 十一.箱体及附件的结构设计和选择 十二. 设计小结 十三. 参考资料 一设计任务书 设计题目:设计带式运输机传动装置中的双级斜齿圆柱齿轮减速器。 序号F (N) V (m/s) D (mm) 生产规模工作环境载荷特性工作年限3 13000 0.45 420 单件室内平稳 5年(单班) 二.传动方案得分析拟定: 方案1. 方案2. 外传动为带传动,高速级和低速级均高速级,低速级,外传动均为圆柱轮. 为圆柱齿轮传动.
方案的简要对比和选定: 两种方案的传动效率,第一方方案稍高.第一方案,带轮会发生弹性滑动,传动比不够精确.第二方案用齿轮传动比精确程度稍高.第二方案中外传动使用开式齿轮,润滑条件不好,容易产生磨损胶合等失效形式,齿轮的使用寿命较短.另外方案一中使用带轮,可用方便远距离的传动.可以方便的布置电机的位置.而方案二中各个部件的位置相对比较固定.并且方案一还可以进行自动过载保护. 综合评定最终选用方案一进行设计. 三.电动机的选择: 计算公式: 工作机所需要的有效功率为:P=F·v/1000 从电动机到工作级之间传动装置的总效率为 连轴器η1=0.99.滚动轴承η=0.98 闭式圆柱齿轮η=0.97. V带η=0.95 运输机η=0.96 计算得要求: 运输带有效拉力为: 13000 N 工作机滚筒转速为: 0.45r/min 工作机滚筒直径为: 420 mm 工作机所需有效功率为: 5.85 kw 传动装置总效率为: 0.7835701 电动机所需功率为: 7.4 KW 由滚筒所需的有效拉力和转速进行综合考虑: 电动机的型号为: Y160M-6 电动机的满载转速为: 960 r/min 四.传动比的分配及动力学参数的计算:
831005拨叉设计说明书
课程名称:机械制造工艺学 题目:CA6140车床拨叉(831005)机械加工工艺规程设计及夹具设计 学院机械制造及自动化工程学院 学生姓名 学号 专业层次 班级 任课教师 年月日
目录 摘要 (1) 一、零件工艺性分析 (2) 1.1零件的作用 (2) 1.2零件的工艺分析 (2) 1.3零件的尺寸图 (3) 2 .机械加工工艺规程设计 (3) 2.1确定毛坯、绘制毛坯简图 (3) 2.1.1选择毛坯 (3) 2.1.2确定毛坯的机械加工余量及尺寸确定 (3) 2.1.3绘制毛坯简图 (4) 2.2定位基准的选择 (4) 2.2.1粗基准的选择 (4) 2.2.2精基准的选择 (4) 2.3各表面加工方案的确定 (4) 2.4加工阶段的划分 (5) 2.5工序的集中与分散 (5) 2.6制定工艺路线 (5) 3.确定机械加工余量和工序尺寸 (7) 4.夹具设计 (13) 4.1夹具体设计前言 (13) 4. 2 问题的提出 (14) 4.3夹具体设计及计算 (14) 4.4夹具装配图 (15) 总结 (16) 参考文献 (17)
CA6140车床拨叉(831005)机械加工工艺规 程设计及夹具设计 课程设计说明书 摘要 这次设计的是CA6140车床(831005)拨叉,包括零件图、毛坯图、装配图各一张,机械加工工序卡片一套以及课程设计说明书的编写。首先我们要熟悉零件和了解其作用:它位于车床变速机构中,主要起换档作用。然后,根据零件的性质和零件图上各端面的粗糙度确定毛坯的尺寸和械加工余量。最后拟定拨差的工艺路线图,制定该工件的夹紧方案,画出夹具装配图。 通过这次课程设计,了解并认识一般机器零件的生产工艺过程,巩固和加深已学过的技术基础课和专业课的知识,理论联系实际,从中锻炼自己分析问题、解决问题的能力,为今后的工作打下一个良好的基础,并且为后续课程的学习打好基础。 关键词:机床拨叉;基准;工艺路线;工序;夹具设计
颚式破碎机课程设计说明书
复摆式颚式破碎机 姓名:林毅光学号:2008334332 班别:08机械3 1 概述 破碎机械是对固体物料施加机械力,克服物料的内聚力,使之碎裂成小块物料的设备。 破碎机械所施加的机械力,可以是挤压力、劈裂力、弯曲力、剪切力、冲击力等,在一般机械中大多是两种或两种以上机械力的综合。对于坚硬的物料,适宜采用产生弯曲和劈裂作用的破碎机械;对于脆性和塑性的物料,适宜采用产生冲击和劈裂作用的机械;对于粘性和韧性的物料,适宜采用产生挤压和碾磨作用的机械。 在矿山工程和建设上,破碎机械多用来破碎爆破开采所得的天然石料,使这成为规定尺寸的矿石或碎石。在硅酸盐工业中,固体原料、燃料和半成品需要经过各种破碎加工,使其粒度达到各道工序所要求的以便进一步加工操作。 通常的破碎过程,有粗碎、中碎、细碎三种,其入料粒度和出料粒度,如表1-1所示。所采用的破碎机械相应地有粗碎机、中碎机、细碎机三种。 表1-1 物料粗碎、中碎、细碎的划分(mm) 制备水泥、石灰时、细碎后的物料,还需进一步粉磨成粉末。按照粉磨程度,可分为粗磨、细磨、超细磨三种。 所采用的粉磨机相应地有粗磨机、细磨机、超细磨机三种。 在加工过程中,破碎机的效率要比粉磨机高得多,先破碎再粉磨,能显著地提高加工效率,也降低电能消耗。 工业上常用物料破碎前的平均粒度 D与破碎后的平均粒度d之比来衡量破碎过程中物料尺寸变化情况,比值i称为破碎比(即平均破碎比) i=D/d 为了简易地表示物料破碎程度和各种破碎机的方根性能,也可用破碎机的最大进料口尺寸与最大出料口尺寸之比作为破碎比,称为公称破碎比。 i=D max/d max 在实际破碎加工时,装入破碎机的最大物料尺寸,一般总是小于容许的最大限度进料口尺寸,所以,平均破碎比只相当于公称破碎比的0.7~0.9。
机械设计减速器设计说明书
. . 东海科学技术学院 课程设计成果说明书 题目:机械设计减速器设计说明书院系:机电工程系 学生姓名: 专业:机械制造及其自动化 班级:C15机械一班 指导教师: 起止日期:2017.12.12-2018.1.3 东海科学技术学院教学科研部
浙江海洋大学东海科学技术学院课程设计成绩考核表 2017 —2018 学年第一学期
设计任务书一、初始数据
设计一级直齿圆柱齿轮减速器,初始数据T = 1500Nm,n = 33r/m,设计年限(寿命):10年,每天工作班制(8小时/班):3班制,每年工作天数:250天,三相交流电源,电压380/220V。 二. 设计步骤 1. 传动装置总体设计方案 2. 电动机的选择 3. 确定传动装置的总传动比和分配传动比 4. 计算传动装置的运动和动力参数 5. 设计V带和带轮 6. 齿轮的设计 7. 滚动轴承和传动轴的设计 8. 键联接设计 9. 箱体结构设计 10. 润滑密封设计 11. 联轴器设计 目录
第一部分设计任务书 (3) 第二部分传动装置总体设计方案 (6) 第三部分电动机的选择 (6) 3.1电动机的选择 (6) 3.2确定传动装置的总传动比和分配传动比 (7) 第四部分计算传动装置的运动和动力参数 (8) 第五部分V带的设计 (9) 5.1V带的设计与计算 (9) 5.2带轮的结构设计 (12) 第六部分齿轮传动的设计 (14) 第七部分传动轴和传动轴承及联轴器的设计 (20) 7.1输入轴的设计 (20) 7.2输出轴的设计 (26) 第八部分键联接的选择及校核计算 (34) 8.1输入轴键选择与校核 (34) 8.2输出轴键选择与校核 (35) 第九部分轴承的选择及校核计算 (35) 9.1输入轴的轴承计算与校核 (35) 9.2输出轴的轴承计算与校核 (36) 第十部分联轴器的选择 (37) 第十一部分减速器的润滑和密封 (38) 11.1减速器的润滑 (38)
拨叉设计说明书 ---第一组
拨叉设计(说明书) 设计题目:拨叉设计 专业:机械设计与制造 班级:15机械一 学号: 姓名:第一组 指导老师: 起讫日期
目录 摘要III 第一节拨叉机械加工工艺规程设计0 一、拨叉的用途0 二、拨叉的技术要求0 三、审查拨叉的工艺性0 第二节确定毛坯、绘制毛坯简图1 一、选择毛坯 1 二、确定毛坯的尺寸公差和机械加工余量1 三、绘制传动轴锻造毛坯简图2 第三节拟定拨叉工艺路线2 一、定位基准的选择2 1、粗基准的选择2 2、精基准的选择2 二、表面加工方法的确定3 三、工序的集中与分散3 四、工序顺序的安排3 五、确定工艺路线3 第四节机床设备及工艺装备的选用4 一、机床设备的选用4 二、工艺装备的选用4 第五节加工余量、工序尺寸和公差的确定5 一、铣左端面的确定5 二、钻φ22的孔确定5 三、拉花键的确定5 四、铣角尺面的确定5 五、M8螺纹孔的确定6 六、18H11槽的确定6 第六节切削用量、时间定额的计算6 一、切削用量的计算6 1、左端面6 2. 花键底孔8 3.拉花键10 4.角尺面11 螺纹孔12 槽13 二、时间定额的计算15 第七节心得体会16 第八节参考文献17 第九节附录17 1、零件-毛坯图纸各一张17 2、机械加工工艺过程卡片1套17 3、机械加工工序的工序卡片1套 17
摘要 所谓机械加工工艺规程,是指规定产品或零部件机械加工工艺过程和操作方法等的工艺文件。生产规模的大小、工艺水平的高低以及解决各种工艺问题的方法和手段都要通过机械加工工艺规程来体现。因此,机械加工工艺规程的设计是一项十分重要而又非常严肃的工作。 制订机械加工工艺规程的原则是:在一定的生产条件下,在保证持量和生产进度的前提下,能获得最好的经济效益。制订工艺规程时,应注意以下三方面的问题: 1、技术上的先进性; 2、经济上的合理性; 3、有良的劳动条件,避免环境污染。
机械原理课程设计完整版
《机械原理课程设计》 学院: 行知学院专业: 机械设计制造及其自动 化 姓名:陈宇学号: 10556109 授课教师:王笑提交时间: 2012 年 7 月1日 成绩:
目录 1.设计工作原理-----------------------------------------------------2 2.方案的分析--------------------------------------------------------4 3. 机构的参数设计几计算-----------------------------------------7 4. 机构运动总体方案图及循环图-------------------------------11 5.机构总体分析----------------------------------------------------13 6. 参考资料----------------------------------------------------------13
半自动钻床机构 一、设计工作原理 1.1、工作原理及工艺动作过程 该系统由电机驱动,通过变速传动将电机的1080r/min降到主轴的5r/min,与传动轴相连的各机构控制送料,定位,和进刀等工艺动作,最后由凸轮机通过齿轮传动带动齿条上下平稳地运动,这样动力头也就能带动刀具平稳地上下移动从而保证了较高的加工质量。 设计加工图(一)所示工件ф12mm孔的半自动钻床。进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定。 1.2、设计原始数据及设计要求 半自动钻床设计数据参看表(一) 表(一)半自动钻床凸轮设计数据
颚式破碎机机构综合设计说明书
颚式破碎机的机构设计说明书 一 设计题目简介 右图为一简摆式颚式破碎机的结构示意图。当与带轮固联的曲柄1绕轴心O 连续回转时,在构件2、3、4的推动下,动颚板5绕固定点F 往复摆动,与固定颚板6一起,将矿石压碎。 颚式破碎机设计数据如表所示。 为了提高机械效率,要求执行机构的最小传动角大于650;为了防止压碎的石料在下落时进一步碰撞变碎,要求动颚板放料的平均速度小于压料的平均速度,但为了减小驱动功率,要求速比系数k (压料的平均速度/放料的平均速度)不大于1.2。采用380V 三相交流电动机。该颚式破碎机的设计寿命为5年,每年300工作日,每日16小时。 二 设计任务 1.针对两图所示的颚式破碎机的执行机构方案,依据设计数据和设计要求,确定各构件的运动尺寸,绘制机构运动简图,并分析组成机构的基本杆组; 2.假设曲柄等速转动,画出颚板角位移和角速度的变化规律曲线; 3.在颚板挤压石料过程中,假设挤压压强由零到最大线性增加,并设石料对颚板的压强均匀分布在颚板有效工作面上,在不考虑各处摩擦、构件重力和惯性力的条件下,分析曲柄所需的驱动力矩; 4.取曲柄轴为等效构件,要求其速度波动系数小于15 %,确定应加于曲柄轴上的飞轮 简摆式颚式破碎机
转动惯量; 5.用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。 6.图纸上绘出最终方案的机构运动简图(可以是计算机图)并编写说明书。 方案设计 三、方案分析 一凸轮摆杆机构:由于凸轮机构磨损严重,所以不适合破碎机。 二双摆杆机构:由于摆杆机构的主运动不好设计,所以不选用这种。 三曲柄滑块机构:曲柄滑块机构传动角较小,不适合受力大的机械。 机构原理分析 如图所示,机器经皮带(图中未画出)使曲柄2顺时针回转,然后通过构件3,4,5使动颚板6向左摆动向固定于机架1上的定颚板7时,矿石即被扎碎;当动颚板6向右摆动时,被扎碎的矿石即下落。