数控铣床常用编程指令
数控铣床常用编程指令
?一、有关单位的设定
1.尺寸单位选择G20,G21,G22
格式:G20;
G21;
G22;
本系统采用3种尺寸输入制式:英制由G20指定,公制由G21指定,脉冲当量由G22指定,缺省时采用公制。3种制式下线性轴、旋转轴的尺寸单位如下表所示。
尺寸输入制式及其单位
?
线性轴
旋转轴
英制(G20)
英寸
度
公制(G21)
毫米
度
脉冲当量(G22)
移动轴脉冲当量
旋转轴脉冲当量
这3个代码必须在程序的开头坐标系设定之前用单独的程序段指令。
G20,G21,G22不能在程序的中途切换。
2.进给速度单位的设定G94、G95
格式:G94 [ F_ ];
G95 [ F_ ];
G94为每分钟进给,F的单位依G20/G21/G22的设定而为mm/min,in/min或脉冲当量/min。此外,G94 F_可以指定旋转轴的速度,旋转轴的速度单位为度/min或脉冲当量/min。
G95为每转进给,在F之后,直接指定刀具在主轴转一转的进给量,单位依G20/G21/G22的设定而为mm/r,in/r或脉冲当量/r。这个功能必须在主轴装有编码器时才能使用。
G94,G95为模态功能,可相互注销,G94为缺省值。
这两种指令功能的关系为:每分钟进给=每转进给×主轴速度
?
二、进给控制指令
常用G指令动画
1.快速定位指定G00
格式:G00 X_ Y_ Z_ A_ B_ C_ U_ V_ W_;
其中,X,Y,Z,A,B,C,U,V,W为快速定位终点,在G90时为终点在工件坐标系中的坐标;在G91时为终点相对于起点的位移量。
2.线性进给指令G01
格式:G01 X_ Y_ Z_ A_ B_ C_ U_ V_ W_ F_;
其中,X,Y,Z,A,B,C,U,V,W为终点,在G90时为终点在工件坐标系中的坐标;在G91时为终点相对于起点的位移量。
(1)圆弧进给
格式:
图2 圆弧插补应用
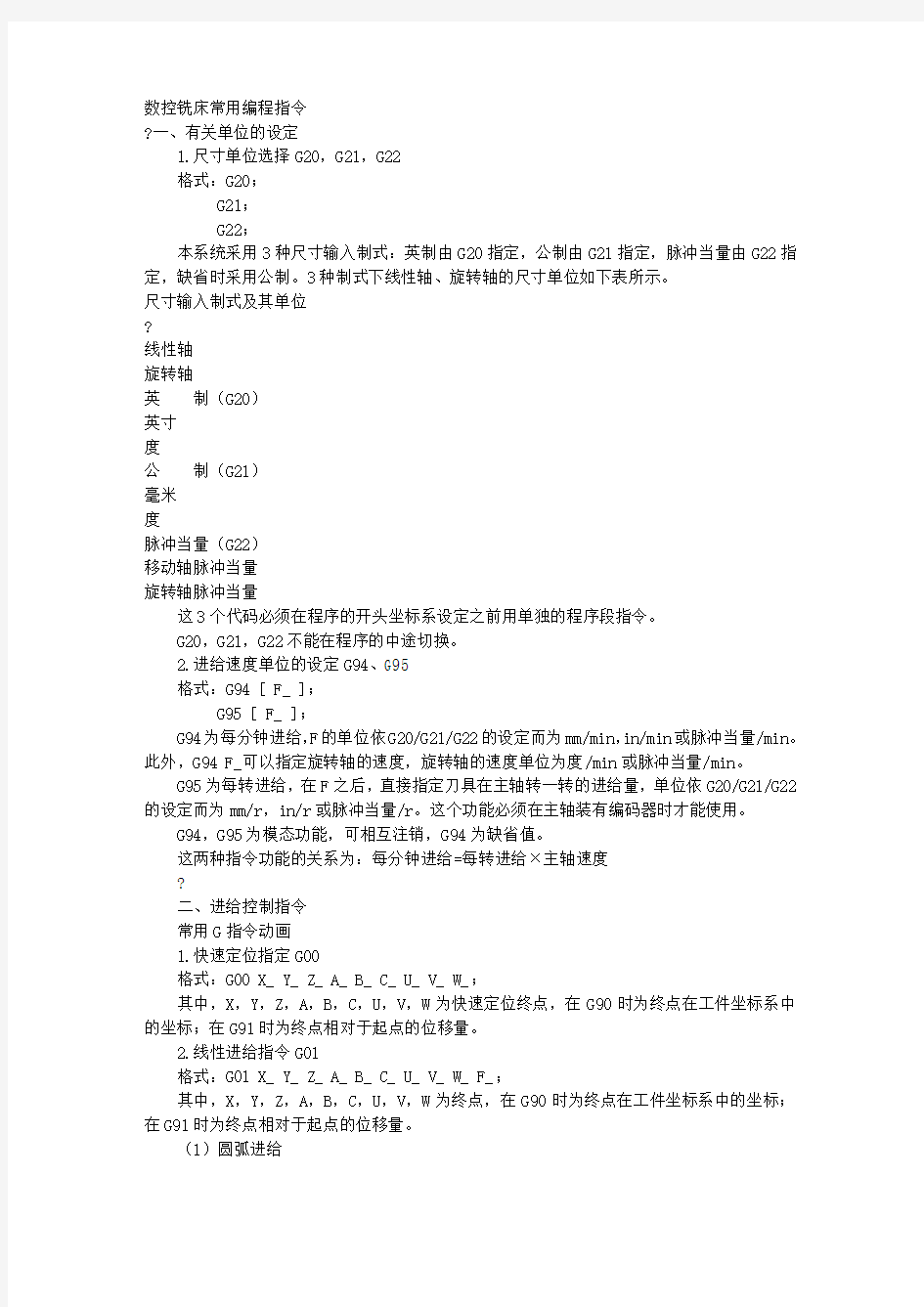
其中,α、β∈{X,Y,Z,U,V,W}为圆弧终点,在G90时为圆弧终点在工件坐标系中的坐标;在G91时为圆弧终点相对于圆弧起点的位移量;
γ、δ∈{I,J,K},不论在G90还是在G91时都是以增量方式指定,为圆心相对于起点的偏移值,R为圆弧半径,当圆弧圆心角小于180°时,R为正值,否则R为负值,整圆编程时不可以使用R,只能用γ、δ;F为编程的两个轴的合成进给速度.
在G02/G03前必须用G17/G18/G19指定平面,其中用G17代码进行XY平面的指定,省略时就被默认为是G17,但当在ZX(G18)和YZ(G19)平面上编程时,平面指定代码不能省略。α、β必须与指定平面中的轴相对应,I,J,K分别表示X(U),Y(V),Z(W)轴圆心的坐标减去圆弧起点的坐标。如图3所示。
各坐标平面的圆弧编程格式分别为:
XY平面的圆弧
ZX平面的圆弧
YZ平面的圆弧
G02为顺时
针圆弧插补,G03为逆时针圆弧插补;
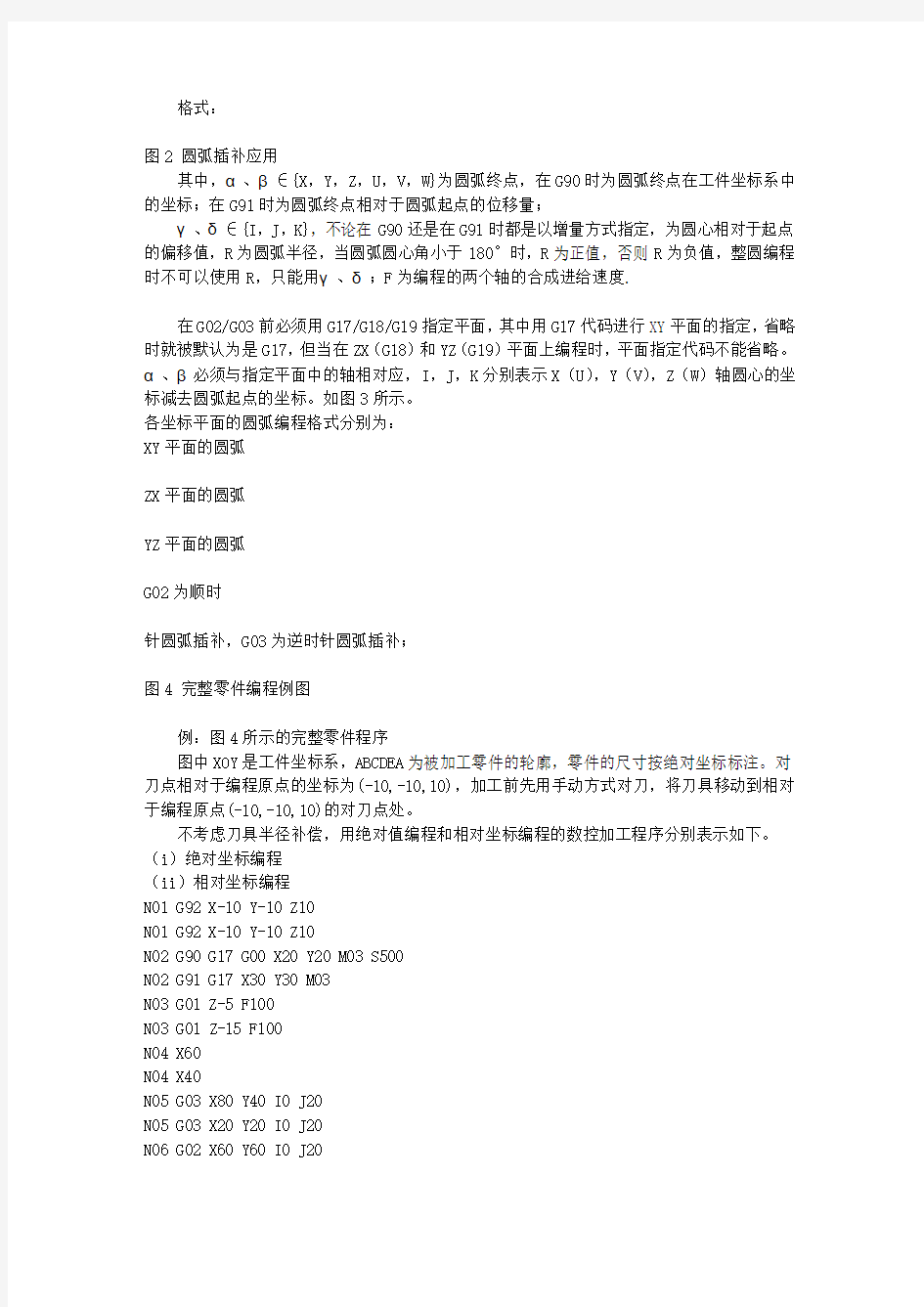
图4 完整零件编程例图
例:图4所示的完整零件程序
图中XOY是工件坐标系,ABCDEA为被加工零件的轮廓,零件的尺寸按绝对坐标标注。对刀点相对于编程原点的坐标为(-10,-10,10),加工前先用手动方式对刀,将刀具移动到相对于编程原点(-10,-10,10)的对刀点处。
不考虑刀具半径补偿,用绝对值编程和相对坐标编程的数控加工程序分别表示如下。(i)绝对坐标编程
(ii)相对坐标编程
N01 G92 X-10 Y-10 Z10
N01 G92 X-10 Y-10 Z10
N02 G90 G17 G00 X20 Y20 M03 S500
N02 G91 G17 X30 Y30 M03
N03 G01 Z-5 F100
N03 G01 Z-15 F100
N04 X60
N04 X40
N05 G03 X80 Y40 I0 J20
N05 G03 X20 Y20 I0 J20
N06 G02 X60 Y60 I0 J20
N06 G02 X-20 Y20 I0 J20
N07 G01 X20 Y40
N07 G01 X-20 Y-20
N08 Y20
N08 Y-20
N09 Z10
N09 Z15
N10 G00 X-10 Y-10
N10 G00 X-30 Y-30
N11 M05
N11 M05
N12 M02
N12 M02
?
三、刀具补偿功能指令
1.刀具半径补偿G40,G41,G42
格式:
G40;
其中刀补号地址D后跟的数值是刀具号,它用来调用内存中刀具半径补偿的数值。如D01就是调用在刀具表中第1号刀具的半径值。这一半径值是预先输入在内存刀具表中的01号位置上的。刀补号地址数设有100个,即D00—D99。
在进行刀具半径补偿前,必须用G17或G18、G19指定补偿是在哪个平面上进行。α,β
必须与指定平面中的轴相对应。在多轴联动控制中,投影到补偿平面上的刀具轨迹受到补偿,平面选择的切换必须在补偿取消方式进行,若在补偿方式进行,则报警。
G40是取消刀具半径补偿功能。
G41 在相对于刀具前进方向左侧进行补偿,称为左刀补。
G42是在相对于刀具前进方向右侧进行补偿,称为右刀补。
G40、G41、G42都是模态代码,可相互注销。
2.刀具长度补偿G43,G44,G49
格式:
G49 a_;
其中,a∈{X,Y,Z,U,V,W},为补偿轴的终点坐标,H为长度补偿偏置号。
把编程时假定的理想刀具长度与实际使用的刀具长度之差作为偏置设定在偏置存储器中,该指令不改变程序就可以实现对a轴运动指令的终点位置进行正向或负向补偿。
用G43(正向偏置),G44(负向偏置)指令偏置的方向。H指令设定在偏置存储器中的偏置量。
无论是绝对指令还是增量指令,由H代码指定的已存入偏置存储器中的偏置值在G43时加,在G44时则是从a轴运动指令的终点坐标值中减去。计算后的坐标值成为终点。
偏置号可用H00~H99来指定。偏置值与偏置号对应,可通过MDI/CRT先设置在偏置存储器中。对应偏置号00即H00的偏置值通常为0,因此对应于H00的偏置量不设定。
要取消刀具长度补偿时用指令G49或H00。
G43、G44、G49都是模态代码,可相互注销。
四、简化编程指令
1.镜像功能G24,G25
格式:G24 X_ Y_ Z_ A_ B_ C_ U_ V_ W_;
M98 P_;
G25 X_ Y_ Z_ A_ B_ C_ U_ V_ W_;
当工件相对于某一轴具有对称形状时,可以只对工件的一部分进行编程,利用镜像功能和子程序,能加工出工件的对称部分,这就是镜像功能。当某一轴的镜像有效时,该轴执行与编程方向相反的运动。
G24建立镜像,由指令坐标轴后的坐标值指定镜像位置,G25指令用于取消镜像。
G24、G25为模态指令,可相互注销,G25为缺省值。
2.缩放功能G50,G51
格式:G51 X_ Y_ Z_ P_;
M98 P_;
G50;
其中,G51中的X、Y、Z给出缩放中心的坐标值,P后跟缩放倍数。
G51既可指定平面缩放,也可指定空间缩放。
图9 ΔABC缩放示意图
用G51指定缩放开,G50指定缩放关。在G51后,运动指令的坐标值以(X,Y,Z)为缩放中心,按P规定的缩放比例进行计算。使用G51指令可用一个程序加工出形状相同,尺寸不同的工件。
G51、G50为模态指令,可相互注销,G50为缺省值。
例如在图9所示的三角形ABC中,顶点为A(30,40),B(70,40),C(50,80),若缩放中心为D(50,50),则缩放程序为
G51 X50 Y50 P2
执行该程序,将自动计算A′,B′,C′三点坐标数据为A′(10,30),B′(90,30),C′(50,110),从而获得放大一倍的△A′B′C′。
缩放不能用于补偿量,并且对A,B,C,U,V,W轴无效。
3.旋转变换G68,G69
格式:G68 α_ β_ P_;
G69;
其中,(α,β)是由G17,G18或G19定义的旋转中心,P为旋转角度,单位是“°”,0≤P≤360.000°
G68为坐标旋转功能,G69为取消坐标旋转功能。
在有刀具补偿的情况下,先进行坐标旋转,然后才进行刀具半径补偿、刀具长度补偿。
在有缩放功能的情况下,先缩放后旋转。
4.固定循环
数控加工中,某些加工动作循环已经典型化。例如,钻孔、镗孔的动作是孔位。
平面定位、快速引进、工作进给、快速退回等,这样一系列典型的加工动作已经预先编好程序,存储在内存中,可用包含G代码的一个程序段调用,从而简化编程工作。这种包含了典型动作循环的G代码称为循环指令。(
孔加工固定循环指令有G73、G74、G76,G80~G89,通常由下述6个动作构成(见图11):
①X、Y轴定位;
②快速运动到R点(参考点);
③孔加工;
④在孔底的动作;
⑤退回到R点(参考点);
⑥快速返回到初始点。
固定循环的数据表达形式可以用绝对坐标(G90)和相对坐标(G91)表示,如图12所示,其中图(a)是采用G90的表示,图(b)是采用G91的表示。
固定循环的程序格式包括数据形式、返回点平面、孔加工方式、孔位置数据、孔加工数据和循环次数。数据形式(G90或G91)在程序开始时就已指定,因此,在固定循环程序格式中可不注出。固定循环的程序格式如下:
式中第一个G代码(G98或G99)为返回点平面G代码,G98为返回初始平面,G99为返回R点平面;
第二个G代码为孔加工方式,即固定循环代码G73,G74,G76和G81~G89中的任一个;
X、Y为孔位数据,指被加工孔的位置;
Z为R点到孔底的距离(G91时)或孔底坐标(G90时);
R为初始点到R点的距离(G91时)或R点的坐标值(G90时);
Q指定每次进给深度(G73或G83时),是增量值,Q<0;
K指定每次退刀(G73或G83时)刀具位移增量,K>0;
I、J指定刀尖向反方向的移动量(分别在X、Y轴向上);
P指定刀具在孔底的暂停时间;
F为切削进给速度;
L指定固定循环的次数;
G73、G74、G76和G81~G89、Z、R、P、F、Q、I、J、K不是模态指令。G80、G01~G03等代码可以取消固定循环。
在固定循环中,定位速度由前面的指令速度决定。孔加工类固定循环指令介绍如下:(1)G73:高速深孔加工循环
该固定循环用于Z轴的间歇进给,使深孔加工时容易排屑,减少退刀量,可以进行高效率的加工。Q值为每次的进给深度(q);退刀用快速,其值K为每次的退刀量。Q>K。
例:
%0073
N10 G92 X0 Y0 Z80
N15 G00
N20 G98 G73 G90 X100 G90 R40 P2 Q-10 K5 G90 Z0 L2 F200
N30 G00 X0 Y0 Z80
N40 M30
注意:如果Z、K、Q移动量为零时,该指令不执行。
(2)G81:钻孔循环(中心钻)
图15为G81指令的动作循环,包括X、Y坐标定位、快进、工进和快速返回等动作。
例:
%0081
N10 G92 X0 Y0 Z80
N15 G00
N20 G99 G81 G90 X100 G90 R40 G90 Z0 P2 F200 I2
N30 G90 G00 X0 Y0 Z80
N40 M30
注意:如果Z的移动位置为零,该指令不执行。
(3)G83:深孔加工循环 (点击右键,选择菜单中的播放.)
?
在图16的深孔加工循环中,每次进刀量用地址Q给出,其值q为增量值。每次进给时,应在距已加工面d(mm)处将快速进给转换为切削进给。d是由参数确定的。
例:
%0083
N10 G92 X0 Y0 Z80
N15 G00
N20 G99 G83 G91 X100 G90 R40 P2 Q-10 K5 Z0 F200 I2
N30 G90 G00 X0 Y0 Z80
N40 M30
注意:如果Z、Q、K的移动量为零,该指令不执行。
?
注意:1、在固定循环中,定位速度由前面的指令决定。
2、各固定循环指令均为非模态,因此每句指令的各项参数应写全。
3、固定循环中定位方式取决于上次是G00还是G01,因此如果希望快速定位则在上一行或本语句开头加G00。
(13)G80:取消固定循环
该指令能取消固定循环,同时R点和Z点也被取消。
五、其他功能指令
1.暂停指令G04
格式:G04 P_;
G04为暂停指令,暂停时间由P后面的数值指定,单位为s。
在执行有G04功能的程序段时,先执行暂停功能。
G04在前一程序段的进给速度降到零之后才开始暂停动作。
G04仅在其被规定的程序段中有效。
G04可使刀具作短暂停留,以获得圆整而光滑的表面。如对不通孔作深度控制时,在刀具进给到规定深度后,用暂停指令使刀具作非进给光整切削,然后退刀,保证孔底平整。