两相步进电机驱劢器使用说明DM3622DM362信浓步进电机
两相步进电机驱动器使用说明
一.产品简介
1.
概述
新推出的数字式两相步进电机驱动器,采用PI 控制算法,低噪音,低振动,低发热,低中高速运行都很平
稳,性能优越,适合驱动中小型的任何2.2A 相电流以下的两相或四相混合式步进电机。可通过拨码开关选择运行电流和细分,有 16 种细分,16 种电流供选择,具有过压、欠压报警,相电流过流保护,马达相位开路检测,其输入控制信号均采用光电隔离。内置自运行模式,可以通过跳线设置受控自运行及持续自运行模式,有SW5-SW8设置自运行速度,也可由外部信号控制自运行时的启动和停止以及电机的正反转。脉冲,方向,和使能端都有恒流和反向保护,可以直接接 4-28V 的信号电平。驱动器内置自动半流,极大地减小了电机发热。
2.
特性
PI 控制算法,低噪音,低振动,低发热; 信号输入:单端,脉冲+方向及双脉冲; 内置微细分;
供电:最大可达DC36V ;
电流设定方便,16档可选,输出电流峰值可达 2.2A ; 静止 1S 后电流减半
可驱动 4,6,8线两相步进电机,对不同电机具有参数自动整定功能; 出厂默认最高细分128,16档可调,可根据客户要求定制; 光隔离差分信号输入,输入脉冲频率最大300KHz ;
具有过压、欠压报警,相电流过流保护,马达相位开路检测等功能;
脉冲,方向和使能端子都有恒流输入功能,可以直接连接输入信号,而不用外加串联电阻降压限流保护。
高可靠性:采用多层板和表面贴封,功率器件留有足够余量;
3. 应用领域
适合各种中小型自动化设备和仪器,例如:气标机、打标机、贴标机、割字机、镭射打标机、绘图仪、数控机床、小型雕刻机、自动装配设备等。在用户期望小噪声、高精度、高速度的设备中应用效果特佳。
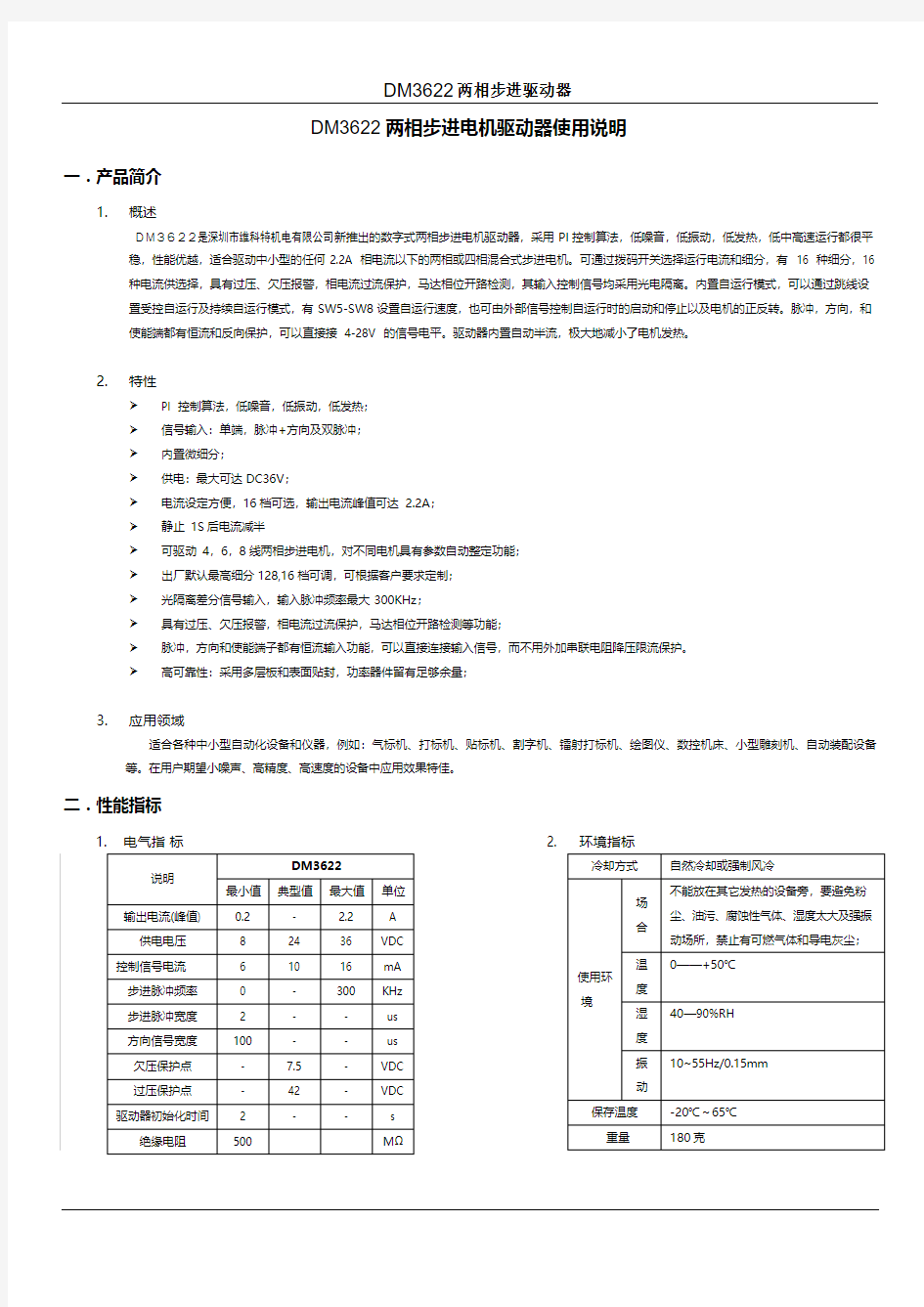
二.性能指标
DM3622DM3622是深圳市维科特机电有限公司
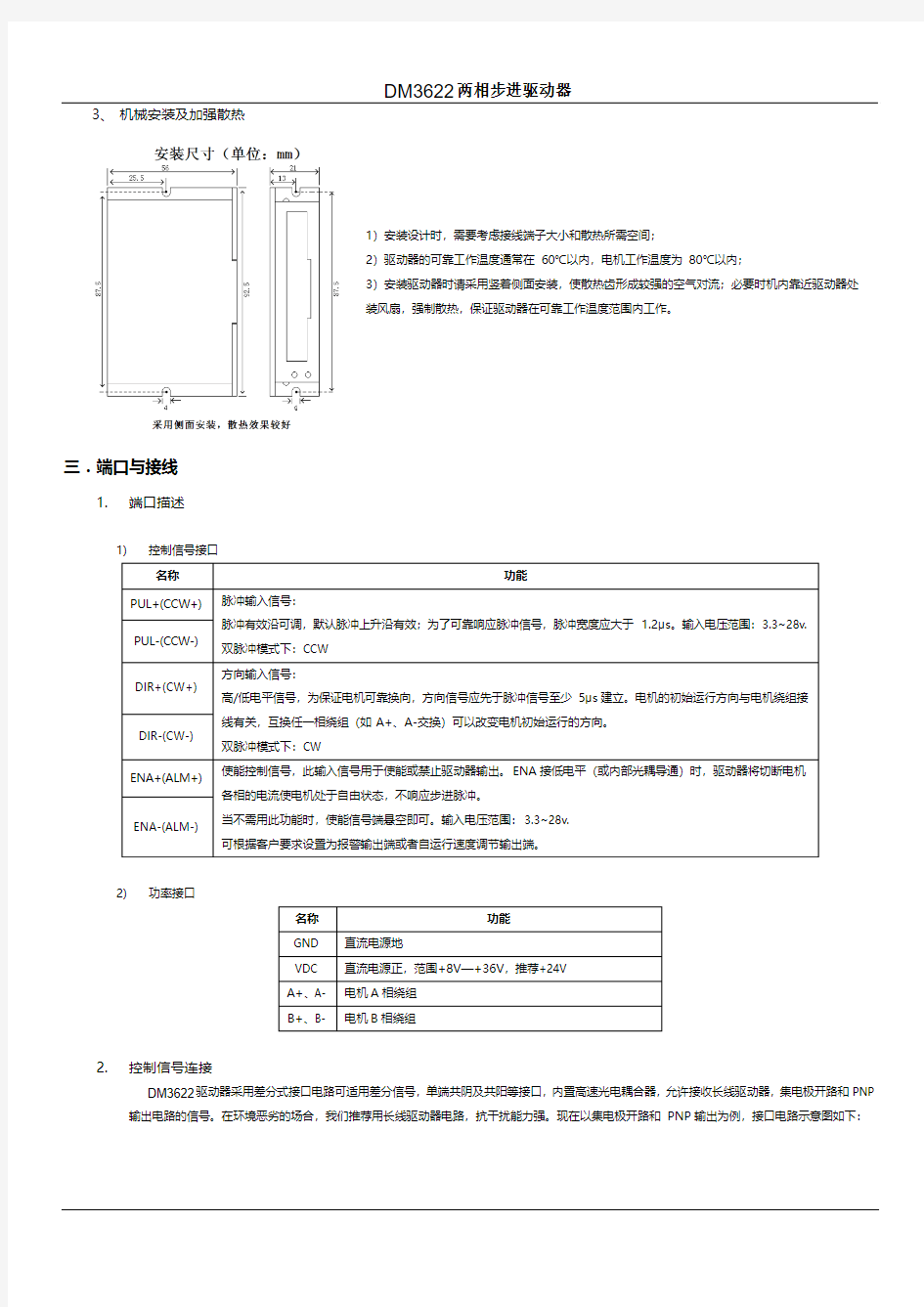
三.端口与接线
1.端口描述
1)控制信号接口
名称
PUL+(CCW+) 脉冲输入信号:
脉冲有效沿可调,默认脉冲上升沿有效;为了可靠响应脉冲信号,脉冲宽度应大于
双脉冲模式下:CCW
PUL-(CCW-)
DIR+(CW+) 方向输入信号:
高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少线有关,互换任一相绕组(如
DIR-(CW-)
2.控制信号连接
驱动器采用差分式接口电路可适用差分信号,单端共阴及共阳等接口,内置高速光电耦合器,允许接收长线驱动器,集电极开路和PNP 输出电路的信号。在环境恶劣的场合,我们推荐用长线驱动器电路,抗干扰能力强。现在以集电极开路和PNP输出为例,接口电路示意图如下:DM3622
▲注意:脉冲,方向和使能端子都有恒流输入功能,可以直接连接输入信号,而不用外加串联电阻降压限流保护
3. 控制信号模式设置
4.
接线要求
1) 为了防止驱动器受干扰,建议控制信号采用屏蔽电缆线,并且屏蔽层与地线短接,除特殊要求外,控制信号电缆的屏蔽线单端接地:屏蔽线的
上位机一端接地,屏蔽线的驱动器一端悬空。同一机器内只允许在同一点接地,如果不是真实接地线,可能干扰严重,此时屏蔽层不接。
2) 脉冲和方向信号线与电机线不允许并排包扎在一起,最好分开至少
10cm 以上,否则电机噪声容易干扰脉冲方向信号引起电机定位不准,系统
不稳定等故障。
3) 如果一个电源供多台驱动器,应在电源处采取并联连接,不允许先到一台再到另一台链状式连接。
4) 严禁带电拔插驱动器强电 P2端子,带电的电机停止时仍有大电流流过线圈,拔插 P2端子将导致巨大的瞬间感生电动势将烧坏驱动器。
5)
严禁将导线头加锡后接入接线端子,否则可能因接触电阻变大而过热损坏端子。
6)
接线线头不能裸露在端子外,以防意外短路而损坏驱动器。
四.电流及细分设置
驱动器采用八位拨码开关设定细分、运行电流、静止半流。详细描述如下:
细分设置
电流设置
DM3622注:需打开驱动器外壳,看到电路板上的1.2号跳线,跳线冒可向我司免费索取
2.静止电流设定
脉冲信号停止1秒后电流自动减半,发热量理论上减至25%。
五.电源连接及选择适当的电源
1.电源连接
电源电压在推荐范围可以正常工作,驱动器最好采用非稳压型直流电源供电,也可以采用变压器降压+桥式整流+电容滤波。建议用
DM3622
户使用直流供电,避免电网波动超过驱动器电压工作范围。如果使用稳压型开关电源供电,应注意开关电源的输出电流范围需设成最大。
请注意:
1)接线时要注意电源正负极切勿反接;
2)最好用非稳压型电源;
3)采用非稳压电源时,电源电流输出能力应大于驱动器设定电流的60%即可;
4)采用稳压开关电源时,电源的输出电流应大于或等于驱动器的工作电流;
5)为降低成本,两三个驱动器可共用一个电源,但应保证电源功率足够大。
2.选择适当的电源
1)电压如果要同时保证高效率和低噪音,则驱动器供电电压至少5倍于电机额定相电压(即电机额定相电流×相电阻)。如果您需要电机获得
更好的高速性能,则需要提高驱动器供电电压。如果使用稳压电源供电,要求供电电压不得超过40V。如果使用变压器供电,供电电压不得超
过24V,因为对变压器供电来说,在负载很轻时(如电机不转)它的电压约超过电机运转时的1.4 倍。想要电机平稳安静的运转,选择低一点
的电压。
2)电流最大供电电流应该为两相电流之和。通常情况下,您需要的电流取决于电机的型号、电压、转速和负载条件。实际电源电流值大大低于
这个最大电流值,因为驱动器采用的是开关式放大器,将高电压低电流转换成低电压高电流,电源电压超过电机电压越多,需要的电源电流越
少。
3)再生放电当电机减速的时候,它会像发电机一样将负载的动能转化为电能。一些能量会被驱动器和电机消耗掉。如果您的应用中有大的负载
以高速运行,相当大的动能会被转换成电能。通常简单的线性电源有一个大的电容来吸收这些能量而不会对系统造成损坏。开关电源往往会在
过压的状况下关闭,多余的能量会回传给驱动器,可能会造成驱动器的损坏。因此在这种情况下,要外接吸收电阻或电容。
六.电机连接
可以用来驱动4、6
、8线的两相、四相混合式步进电机,步距角为 1.8度和 0.9度的均可适用。选择电机时主要由电机的扭矩和额定电流决
定。扭矩大小主要由电机尺寸决定。尺寸大的电机扭矩较大;而电流大小主要与电感有关,小电感电机高速性能好,但电流较大。
1. 电机选配
1)确定负载转矩,传动比工作转速范围 T 电机=C (J ε+T 负载)
J :负载的转动惯量 ε:负载的最大角加速度 C :安全系数,推荐值1.2 T 负载:最大负载转矩,包括有效负载、摩擦力、传动效率等阻力转矩 2)电机输出转矩由哪些因素决定
对于给定的步进电机和线圈接法,输出扭矩有以下特点: 电机实际电流越大,输出转矩越大,但电机铜损(P=I 2R )越多,电机发热偏多; 驱动器供电电压越高,电机高速扭矩越大;
转速越大,扭矩越小。
2. 电机接线
对于 6、8线步进电机,不同线圈的接法电机性能有相当大的差别,如下图所述:
3. 输入电压和输出电流的选用
1)
供电电压的设定
一般来说,供电电压越高,电机高速时力矩越大。越能避免高速时掉步。但另一方面,电压太高会导致过压保护,电机发热较多,甚至可能损坏驱动器。在高电压下工作时,电机低速运动的振动会大一些。 2)
输出电流的设定值
对于同一电机,电流设定值越大时,电机输出力矩越大,但电流大时电机和驱动器的发热也比较严重。具体发热量的大小不仅与电流设定值有关,也与运动类型及停留时间有关。以下的设定方式采用步进电机额定电流值作为参考,但实际应用中的最佳值应在此基础上调整。原则上如温度很低(<40℃)则可视需要适当加大电流设定值以增加电机输出功率(力矩和高速响应) 。 四线电机:输出电流设成等于或略小于电机额定电流值;
六线电机高力矩模式:输出电流设成电机单极性接法额定电流的 50%; 六线电机高速模式:输出电流设成电机单极性接法额定电流的 100%; 八线电机串联接法:输出电流可设成电机单极性接法额定电流的 70%;
八线电机并联接法:输出电流可设成电机单极性接法额定电流的140%。
DM3622
▲注意:电流设定后请运转电机15-30分钟,如电机温升太高(>70℃),则应降低电流设定值。所以,一般情况是把电流设成电机长期工作时出现温热但不过热时的数值。
七.典型接线图
驱动器能驱动四线、六线或八线的两相/四相电机。
DM3622
注意:
1)不同的电机对应的颜色不一样,使用时以电机资料说明为准,如35与42型电机线颜色是有差别的。
2)相是相对的,但不同相的绕组不能接在驱动器同一相的端子上(A+、A-为一相,B+、B-为另一相),若电机转向与期望转向不同时,仅交换A+、A-的位置即可。
3)本驱动器只能驱动两相混合式步进电机,不能驱动三相和五相步进电机。
4)判断步进电机串联或并联接法正确与否的方法:在不接入驱动器的条件下用手直接转动电机的轴,如果能轻松均匀地转动则说明接线正确,如果遇到阻力较大和不均匀并伴有一定的声音说明接线错误。
八.保护功能
当1 绿1 红交替闪烁时,表示相位过流。
当1 绿2 红交替闪烁时,表示马达相位开路。
当1 绿3 红交替闪烁时,表示供电电压高。
当1 绿4 红交替闪烁时,表示供电电压低。
当1 绿5 红交替闪烁时,表示有其它故障。
以上保护功能启动时,电机轴失去自锁力,若要恢复正常工作,需要确认以上故障消除,然后电源重新上电,电源指示灯绿灯常亮,电机轴被锁紧,驱动器恢复正常。
▲注意:由于驱动器不具备电源正负极反接保护功能,因此,上电前请再次确认电源正负极接线正确。正负极接反将导致烧坏驱动器中的保险管!
3)细分驱动器有何优点?
因减少每一步所走过的步距角,提高了步距均匀度,因此可以提高控制精度。
可以大大地减少电机振动,低频振荡是步进电机的固有特性,用细分是消除它的最好方法。
可以有效地减少转矩脉动,提高输出转矩。
以上这些优点普遍被用户认可,并给他们带来实惠,所以建议您最好选用细分驱动器。
4)为什么我的电机只朝一个方向运转?
可能方向信号太弱,或接线极性错,或信号电压太高烧坏方向限流电阻。
脉冲模式不匹配,信号是脉冲/方向,驱动器必须设置为此模式;若信号是CW/CCW(双脉冲模式),驱动器则必须也是此模式,否则电机只朝一个方向运转。
十.产品保修
1.一年保修期
深圳市维科特机电有限公司对其产品的原材料和工艺缺陷提供从发货日起一年的质保。
2.不属保修之列
不恰当的接线,如电源正负极接反和带电拔插
未经许可擅自更改内部器件
超出电气和环境要求使用
环境散热太差
L297+L298步进电机驱动控制板说明书
L297+L298步进电机驱动控制板说明书 一、板子跳线器说明:所有跳线都在左边,则由单片机控制。 1、靠近光偶的短路冒打在CLK-555方向时有板上的555提供时钟给驱动器;打在CLK-CP U时右用户CPU提供时钟给驱动器。 2、JT5打在右边:297的HALF/FULL(全速/半速)脚接GND了默认为FULL模式了;JT5打在左边:297的HALF/FULL脚空了电机模式用户自己控制。 3、JT6打在右边:297的CW/CCW脚(方向)接GND了默认为顺时针转动模式了;JT6打在左边:297的CW/CCW脚空了电机正反转模式用户自己控制。 二、按键说明: 板子使用全新的L297作为控制芯片 L298作为驱动芯片板载NE555时钟电路为L297提供CLK因此该版在不需要外部控制的情况下就可以工作板载3个控制按键EN - 使能 CW - 反向旋转 HF - 半速旋转 通过按键就可以直接控制电机的正反转、全速/半速和使能。 三、基本功能描述: 通过光藕隔离之后将CLK CW HF EN四个基本控制端引出单片机等可以非常方便的控制电路的工作这个板子改进的地方比较多也方便研究使用。板子使用1N5822快速二极管作为续流器件其速度要远远快于整流桥的 L298和电机能够提供更完善的有效的保护。模块供电+ 5V(L297和L298控制供电) +12V(根据电机最低4V最高16V)给电机供电。 电机输出接口包括: +12V 四相输出 GND(请根据您的电机连接)。 控制输入接口包括: GND CLK EN CW HF。 EN:高电平停止,低电平使能。 RET:高电平停止,低电平使能。 C/CW:高电平逆时针,低电平顺时针。 H/HD:高电平全速,低电平半速。 CLK:时钟脉冲。 需要特别说明的是:为了测试方便在板子上设置了NE555构成的一个低频时钟源(使用时跳线冒打在CLK-555处),当您使用外部的时钟信号控制电机的转速时必须跳线冒打在CLK -CPU处否则外部时钟是不会传到L297里面。
步进电机控制器--说明书[1].答案
步进电机,伺服电机可编程控制器KH-01使用说明 一、系统特点 ●控制轴数:单轴; ●指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制); ●最高输出频率:40KHz(特别适合控制细分驱动器); ●输出频率分辨率:1Hz; ●编程条数:99条; ●输入点:6个(光电隔离); ●输出点:3个(光电隔离); ●一次连续位移范围:—7999999~7999999; ●工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态; ●升降速曲线:2条(最优化); ●显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示; ●自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止; ●手动运行功能:可调整位置(手动的点动速度和点动步数可设定); ●参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度; ●程序编辑功能:可任意插入、删除可修改程序。具有跳转行号、数据判零、语句条数超长和超短的判断功能; ●回零点功能:可双向自动回到零点; ●编程指令:共14条指令; ●外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作; ●电源:AC220V(电源误差不大于±15%)。
一、前面板图 前面板图包括: 1、八位数码管显示 2、六路输入状态指示灯 3、三路输出状态指示灯 4、 CP脉冲信号指示灯
5、 CW方向电平指示灯 6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。 后面板图及信号说明: 后面板图为接线端子,包括: 1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中: 脉冲————步进脉冲信号 方向————电机转向电平信号 +5V————前两路信号的公共阳端 CP、CW的状态分别对应面板上的指示灯 2、启动:启动程序自动运行,相当于面板上的启动键。 3、停止:暂停正在运行的程序,相当于面板上的停止键,再次启动后,程序继续运行。 4、 (限位A)A操作和(限位B)B操作是本控制器的一大特点:对于步进电机,我们一般进行定量定位控制,如控制电机以一定的速度运行一定的位移这种方式很容易解决,只需把速度量和位移量编程即可。但还有相当多的控制是不能事先定位的,例如控制步进电机从起始点开始朝一方向运行,直到碰到一行程开关后停止,当然再反向运行回到起始点。再例如要求步进电机在两个行程开关之间往复运行n次,等等。在这些操作中,我们事先并不知道步进电机的位移量的具体值,又应当如何编程呢?本控制器利用:“中断操作”,我们称之为“(限位A)A操作”和“(限位B)B操作”。以“(限位A)A操作”为例,工作流程为:当程序在运行时,如果“(限位A)A 操作”又信号输入,电机作降速停止,程序在此中断,程序记住了中断处的座标,程序跳转到“(限位A)A操作”入口地址所指定的程序处运行程序。 5、输入1和输入2通过开关量输入端。 6、输出1、输出2和输出3通过开关量输出端。 7、+24V、地—输入输出开关量外部电源,本电源为DC24V/0.2A,此电源由控制器内部隔离提供。 8、 ~220V控制器电源输入端。 输入信号和输出信号接口电路: 本控制器的“启动”、“停止”、“(限位A)A操作”、“(限位B)B操作”、“输入1”、“输入2”为输入信号,他们具有相同的输入接口电路。“输出1”、“输出2”、“输出3”称为输出信号。他们具有相同的输出接口电路。输入和输出电路都有光电隔离,以保证控制器的内部没有相互干扰,控制器内部工作电源(+5V)和外部工作电源(+24V)相互独立,并没有联系,这两组电源由控制器内部变压器的两个独立绕组提供。 开关量输入信号输出信号的状态,分别对应面板上的指示灯。对于输入量,输入低电平(开关闭合时)灯亮,反之灯灭;对于输出量,输出0时为低电平,指示灯灭,反之灯亮。 开关量输入电路:
信浓标准步进电机型号及选型建议
信浓步进电机的主要生产基地在东莞信浓马达有限公司,信浓日本工厂生产占比不到10%,信浓日本工厂生产的步进电机是为对应日本市场那些订单批量小、交货期要求急、可以接受比较高的单价的客户需求,其他情况都是在东莞信浓工厂生产,当然步进电机以外的产品还有其他工厂生产。信浓的产品彩页里一般只有标准步进电机型号,但标准步进电机并不是信浓的主力产品,绝大多数是定制产品,很多标准步进电机型号是没有生产过的,信浓的产品彩页上只有标准电机型号,是因为定制型号不方便公开产品信息,但标准型号可以告诉客户信浓可以生产什么尺寸、什么特性的产品。具体信浓的标准步进电机的型号哪些是比较通用的?不太通用的标准步进电机型号应该怎么样替代到定制型号呢?维科特机 电根据长期代理销售信浓步进电机的经验,给您整理了以下信浓步进电机选型建议,希望对于您的步进电机选型有帮助。 信浓28步进电机 信浓28步进电机标准型号有STP-28D100X,STP-28D200X,STP-28D300X,型号其中的字母X是需要进一步明确下来是1、2还是3、4,也就是说如果选定了型号,不应该带“X”,而是下面的标准步进电机型号之一: STP-28D1001,STP-28D1002,STP-28D1003,STP-28D1004,STP-28D2001,STP-28D2002,STP-28D2003,STP-28D2004,STP-28D3001,STP-28D3002, STP-28D3003,STP-28D3004。信浓标准28步进电机没有SST起头的型号,这些 标准电机在日本设计,一般是外销型号,建议选在东莞信浓设计生产的型号来替代:STP-28D1012,STP-28D1012-01,STP-28D2006,STP-28D2006-01,STP-28D3006,STP-28D3006-01,STP-28D3006-03。 信浓35步进电机 信浓35步进电机有2套模具,其中1套安装孔间距是26mm,轴径3mm, 这个系列扭矩小,电机轴承小,带负载能力差,基本上是外销型号,不推荐选用,选了一般也没有货,具体型号有: SST35D1045,SST35D1065,SST35D1085,SST35D1105,SST35D1125。 另外一套模具没有SST起头的标准型号,只有STH-35D起头的定制型号,机身长27.5mm,轴径5mm,安装法兰孔间距29mm,和国内常用的26mm不一样。
步进电机驱动器说明书
L297 L298步进电机驱动控制板说明书 一、板子跳线器说明: 1、靠近光偶的短路冒打在CLK-555方向时有板上的555提供时钟给驱动器;打在CLK-CP U时右用户CPU提供时钟给驱动器。 2、JT5打在右边:297的HALF/FULL(全速/半速)脚接GND了默认为FULL模式了;JT5打在左边:297的HALF/FULL脚空了电机模式用户自己控制。 3、JT6打在右边:297的CW/CCW脚(方向)接GND了默认为顺时针转动模式了;JT6打在左边:297的CW/CCW脚空了电机正反转模式用户自己控制。 二、按键说明: 板子使用全新的L297作为控制芯片 L298作为驱动芯片板载NE555时钟电路为L297提供CLK因此该版在不需要外部控制的情况下就可以工作板载3个控制按键EN - 使能 CW - 反向旋转 HF - 半速旋转 通过按键就可以直接控制电机的正反转、全速/半速和使能。 三、基本功能描述: 通过光藕隔离之后将CLK CW HF EN四个基本控制端引出单片机等可以非常方便的控制电路的工作这个板子改进的地方比较多也方便研究使用。板子使用1N5822快速二极管作为续流器件其速度要远远快于整流桥的 L298和电机能够提供更完善的有效的保护。模块供电+ 5V(L297和L298控制供电) +12V(根据电机最低4V最高16V)给电机供电。 电机输出接口包括: +12V 四相输出 GND(请根据您的电机连接)。 控制输入接口包括: GND CLK EN CW HF。 需要特别说明的是:为了测试方便在板子上设置了NE555构成的一个低频时钟源(使用时跳线冒打在CLK-555处),当您使用外部的时钟信号控制电机的转速时必须跳线冒打在CLK -CPU处否则外部时钟是不会传到L297里面。 四、接口说明: 1、板子左上方小二接口(JT1) VCC接+5V、GND接电源地,次处为芯片L297和555芯片的工作电压;
2H42B步进电机驱动器说明书
2H42B 细分步进电机驱动器使用手册 V ersion 2.0 版权所有不得翻印 【使用前请仔细阅读本手册,以免损坏驱动器】 东莞市一能机电技术有限公司 DONGGUAN ICAN-TECH CO.,LTD 地址:东莞市万江区新和工业区瑞联振兴工业园B栋4楼 https://www.360docs.net/doc/3411440319.html,/ Email:tech@https://www.360docs.net/doc/3411440319.html,
2H42B 步进电机驱动器 一、 2H42B 步进电机驱动器产品简介 1.1概述 2H42B 步进电机驱动器是一款高性价比的细分两相步进电机驱动器。最大可提供2.0A 的电流输出。由于采用了双极性恒流斩波控制技术,与市面上同类型步进电机驱动器相比,其对步进电机噪声和发热均有明显改善。适用于尺寸为28,35,39,42等各类2相或4相混合式步进电机,具有体积小,使用简单方便等特点。 1.2特点 ◆低噪声,高速大转矩特性 ◆光电隔离差分信号输入,响应频率最高200K ◆供电电压12VDC-36VDC ◆细分精度1,2,4,8,16,32,64,128, ◆输出电流峰值可达2.0A 倍细分可选 ◆静止时电流自动减半 ◆外形尺寸小(96*60*24mm ) ◆可选择脉冲上升沿或下降沿触发 ◆电流设定方便,八档可选 ◆可驱动4、6、8线二相、四相步进电机 ◆具有过流,过温保护功能 1.3应用领域 适用于各类型自动化设备或仪器,如雕刻机、打标机、切割机、激光照排、绘图仪、数控 机床、机械手,包装机械,纺织机械等,极具性价比和竞争力。 二、 2H42B 步进电机驱动器 电气、机械和环境指标 1 网址:www https://www.360docs.net/doc/3411440319.html, 2.2 2H42B 步进电机驱动器使用环境及参数 图1.安装尺寸图 2.4加强散热方式 1) 2H42B 步进电机驱动器的可靠工作温度通常在60℃以内,电机工作温度为80℃以内; 2) 建议使用时选择自动半流方式 (即电机停止时电流自动减至60% ),以减少电机和驱动器的发热; 3) 安装步进电机驱动器时请采用立式侧面安装,使散热面向易于空气对流的方向,必要时在机箱内靠近驱动器处应安装排气风扇,进行强制散热,从而保证驱动器在可靠工作温度范围内工作。 2 网址: www https://www.360docs.net/doc/3411440319.html,
步进电机控制器说明手册
步进电机,伺服电机可编程控制器K H-01使用说明 一、系统特点 ●控制轴数:单轴; ●指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制); ●最高输出频率:40KHz(特别适合控制细分驱动器); ●输出频率分辨率:1Hz; ●编程条数:99条; ●输入点:6个(光电隔离); ●输出点:3个(光电隔离); ●一次连续位移范围:—7999999~7999999; ●工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态; ●升降速曲线:2条(最优化); ●显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、 输入/输出状态显示、CP脉冲和方向显示; ●自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止; ●手动运行功能:可调整位置(手动的点动速度和点动步数可设定); ●参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度; ●程序编辑功能:可任意插入、删除可修改程序。具有跳转行号、数据判零、语句条数超长和超短的判断功能; ●回零点功能:可双向自动回到零点; ●编程指令:共14条指令; ●外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作; ●电源:AC220V(电源误差不大于±15%)。 一、前面板图 前面板图包括: 1、八位数码管显示 2、六路输入状态指示灯 3、三路输出状态指示灯 4、CP脉冲信号指示灯 5、CW方向电平指示灯 6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之 一表示按键。 后面板图及信号说明: 后面板图为接线端子,包括: 1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中: 脉冲————步进脉冲信号 方向————电机转向电平信号 +5V————前两路信号的公共阳端 CP、CW的状态分别对应面板上的指示灯 2、启动:启动程序自动运行,相当于面板上的启动键。 3、停止:暂停正在运行的程序,相当于面板上的停止键,再次启动后,程序继续运行。 4、(限位A)A操作和(限位B)B操作是本控制器的一大特点:对于步进电机,我们一般进行定量定位控制,如控制电机以一 定的速度运行一定的位移这种方式很容易解决,只需把速度量和位移量编程即可。但还有相当多的控制是不能事先定位的,例如控制步进电机从起始点开始朝一方向运行,直到碰到一行程开关后停止,当然再反向运行回到起始点。再例如要求步
XMTD-5000单轴步进电机控制器使用说明书
XMTD-5000 单轴步进电机控制器 使 用 说 明 书 郑州航模星光电自动化设备有限公司
目录 第一章概述 ............................................................................................................. 错误!未定义书签。 1.1 主要特点 .................................................................................................... 错误!未定义书签。 1.2 用户须知 ...................................................................................................... 错误!未定义书签。 1.3 技术参数 ...................................................................................................... 错误!未定义书签。第二章产品简介 .. (4) 2.1 外观与尺寸 (4) 2.2 型号与功能简介 (4) 第三章操作与参数 (5) 3.1 控制面板说明 (5) 3.2 按键操作 (5) 3.3 参数表及功能 (6) 3.4 显示状态与指示灯状态说明 (9) 第四章接线端子与接线方法 (10) 4.1 端子接线图 (10) 4.2 连接步进电机驱动器详细图 (10) 4.3 端子功能详细说明 (11) 第五章调试与运行 (11) 5.1 快速调试方式 (11) 5.2 运行测试 (12) 第六章使用实例 (13) 6.1 连续运行模式(自动换画面广告箱示例) (13) 6.2 单段运行模式(转盘分度头控制示例) (15) 6.3 触发段运行模式(丝杠送料控制示例) (16) 6.4 正反触发运行模式(两行程开关之间往返运动) (17) 第七章常见故障排除方法 (19) 7.1 常见故障问题解答 (19) 7.2 升降速设计简介 (19) 第八章售后服务 (20) 8.1 保修概要 (20)
信浓步进电机型号大全
型号步进马达驱动器组合 Y07-28D1-5008 Y07-35D1-4001 Y07-43D1-1065 Y07-43D1-4271 Y07-43D1-5281 Y07-43D1-5040 Y07-43D1-5060 Y07-59D1-1300 Y07-59D1-2011 Y07-59D1-3260 Y07-59D1-3074 Y07-59D1-17151 Y07-59D1-17155 Y09-59D3-5001 Y09-59D3-7430 Y09-59D3-7536 Y09-59D3-7655 Y09-59D3-7230 Y09-59D3-7360 Y09-59D3-8536 Y09-59D3-7430-C Y07-43D1-4275 Y07-43D4-5045 Y07-42D1-2120 Y07-43D1-2026 Y07-43D4-5070 Y07-43D4-5050 Y07-59D1-3075 Y07-58D1-17151 Y07-58D1-17152 Y07-59D1-17156 Y07-59D1-17150 Y07-59D1-17157 Y07-59D1-3012 Y07-59D1-3044 Y07-59D1-3046 Y07-59D1-3039 Y07-59D1-2072 Y11-43D2-0040 Y11-43D2-0041 Y2SSR2 Y2SSR4 Y2SSR4-S1 Y2SSR4-S2 Y2SSR8 Y2SSR8-S1 Y2SSR8-S2 Y3SSR8 SR2 SR4 SR4-S1 SR4-S2 SR8 SR8-S1 SR8-S2 3SR8 SRAC8 Y2SSRAC8 MS2035MXD Y2S1560-S Y2S3060-S Y2S3060-M Y2S3060-N Y2S3060-O Y2S3060-0 Y2S4080-P 型号减速机步进马达 S42D110A-MACR6S2 S42D110A-MAGR2S2 S42D110A-MA09S2 S42D110A-MAA0S2 S42D110A-MAA8S2 S42D110A-MAC6S2 S42D110A-MAE0S2 S42D110A-MAA00S2 S60D120A-MACR6S2 S60D120A-MAGR2S2 S60D120A-MA09S2 S60D120A-MAA0S2 S60D120A-MAA8S2 S60D120A-MAC6S2 S60D120A-MAE0S2 S60D120A-MAA00S S90D130A-MACR6S2 S90D130A-MAGR2S2 S90D130A-MA09S2 S90D130A-MAA0S2 S90D130A-MAA8S2 S90D130A-MAC6S2 Y09-59D3-7430+KFPL80-5K Y09-59D3-7430+KFPL80-15K 型号刹车型步进马达 Y07-43D1-4275M Y07-58D1-4008 Y09-59D3-7538 型号步进智能驱动器 MSST5-Q-AN MSST5-Q-AE MSST5-Q-RN MSST5-Q-RE MSST10-Q-AN MSST10-Q-AE MSST10-Q-RN MSST10-Q-RE MSST5-PLUS MSST10-PLUS MSST5-S MSST10-S MS3ST10 Y2SST5-S Y2SST10-S Y2SST5-S-24V Y2SST10-S-24V MSST5-C-CN MSST10-C-CN MSST10-C-CE MSST5-C-CE 型号STM集成式步进马达 STM17R STM17R-1D STM17R-1E STM17R-2 STM17R-2D STM17R-2E STM17R-3 STM17R-3D STM17R-3E STM23R-2 STM23R-2D STM23R-2E STM23R-3 STM23R-3D STM23R-3E STM17S-1AN STM17S-1RN STM17S-1AE STM17S-1RE STM17S-2AN STM17S-2RN STM17S-2AE STM17S-2RE STM17S-3AN STM17S-3RN STM17S-3AE STM17S-3RE STM17Q-1AN STM17Q-1RN STM17Q-1AE STM17Q-1RE STM17Q-2AN STM17Q-2RN STM17Q-2AE STM17Q-2RE STM17Q-3AN STM17Q-3RN STM17Q-3AE STM17Q-3RE STM17C-1CN STM17C-1CE STM17C-2CN STM17C-2CE STM17C-3CN STM17C-3CE STM23S-2AN STM23S-2RN STM23S-2AE STM23S-2RE STM23S-3AN
《步进电机控制器》.(DOC)
步进电机控制器 步进电机是一种将电脉冲信号转换成相应的角位移的特殊电机,每改变一次通电状态,步进电机的转子就转动一步。目前大多数步进电机控制器需要主控制器发送时钟信号,并且要至少一个I/O口来辅助控制和监控步进电机的运行情况。在单片机或DSP的应用系统中,经常配合CPLD或者FPGA来实现特定的功能。本文介绍通过FPGA实现的步进电机控制器。该控制器可以作为单片机或DSP的一个直接数字控制的外设,只需向控制器的控制寄存器和分频寄存器写入数据,即可实现对步进电机的控制。1 步进电机的控制原理步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合对数字系统的控制。步进电机可分为反应式步进电机(简称“VR”)、永磁式步进电机(简称“PM”)和混合式步进电机(简称“HB”)。步进电机区别于其他控制电机的最大特点是,通过输入脉冲信号来进行控制,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。步进电机的驱动电路根据控制信号工作,控制信号由各类控制器来产生。其基本原理作用如下: ①控制换相顺序,通电换相。这一过程称为“脉冲分配”。例如:四相步进电机的单四拍工作方式,其各相通电顺序为A—B—C— D。通电控制脉冲必须严格按照这一顺序分别控制A、B、C、D相的通断,控制步进电机的转向。如果给定工作方式正序换相通电,则步进电机正转;如果按反序换相通电,则电机就反转。 ②控制步进电机的速度。如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。两个脉冲的间隔越短,步进电机就转得越快。调整控制器发出的脉冲频率,就可以对步进电机进行调速。 2 控制器的总体设计 控制器的外部接口电路如图1所示。各引脚的功能如F: data[7~O] 控制器与单片机等设备的总线接口; CS 片选信号,低电平有效; Wr 写信号,低电平有效; reset 复位信号,低电平有效; adr[1~O] 内部寄存器地址信号,与单片机等设备地址线相连; clk 待分频的时钟,可由FPGA提供; abcd[3~O] 四相位输出。 控制器的内部原理框图如图2所示,由命令字寄存器(CmcL-reg)、分频系数备份寄存器(fdiv —back)、分频器、相位输出状态机组成。
信浓步进电机STP-59D3039选型及使用说明
STP-59D3039最初是我公司要求信浓工厂为点胶机设备行业定制的一款步进电机,十几年前的时候信浓产品彩页上主要还是6线单极驱动步进电机,所以这款电机就是按照6线标准型号SST59D3300参数定制的,主要变更之处是将电机轴径增大到8mm来提高强度,轴长加长到26mm并轴铣扁以方便安装同步轮。在点胶机行业获得广泛应用,虽然后期大部分厂家换成另外4线双极驱动的步进电机STP-59D3074-04等型号,但目前有些厂家还是在继续选用这款步进电机。 STP-59D3039的主要电气特性参数如下: STP-59D3039主要外形尺寸: STP-59D3039接线图和引线尺寸:
单极驱动的时候按照上图接线,双极驱动的时候,半绕接线可以不接A-B-,接A,Acom和B,Bcom,串联接线的时候不接Acom,Bcom,接AA-和BB-。 但现在很少用户会选用STP-59D3039本来设计目的的单极驱动方式,绝大多数用双极驱动,STP-59D3039用于点胶机的话,通常适合用半绕组接线,这样额定电流还是3A,但总有一半的绕组是浪费的,不如换成STP-59D3039并联特性参数的的STP-59D3074-04,同样电流情况下扭矩和STP-59D3039的一样,但发热量只有STP-59D3039的一半,所以STP-59D3074-04在发热量和STP-59D3039一样的情况下,可以将电流增大到4.2A来获得更大的力矩,而STP-59D3039在4.2A电流下长时间工作可能因过热烧掉了。但如果有负载在低于300rpm转速下工作,可以用STP-59D3039串联接线,额度电流变成2.1A,这时候电机距频图可以参考SST59D3155。综上所述,如果不是用串联接线用于低速运行场合,我们不太推荐选用STP-59D3039。 STP-59D3039单极驱动下的距频图和半绕接线可以参考SST59D3300距频图,串联接线参考SST59D3155距频图。X轴是驱动器不细分情况下的脉冲频率值,这个脉冲频率*0.3=转速,rpm。
步进电机驱动器说明书
TB6600升级版 两相步进驱动器 使用说明书 [使用前请仔细阅读本手册,以免损坏驱动器]
目录 一、产品简介 (3) 概述 (3) 特点 (3) 二、接口和接线介绍 (3) 信号输入端 (3) 电机绕组连接 (3) 电源电压连接 (4) 状态指示 (4) 接线方式 (4) 接线要求 (5) 三、电流、细分拨码开关设定 (5) 细分设定 (5) 工作(动态)电流设定 (6) 四、机械和环境指标 (6) 使用环境及参数 (6) 机械安装图 (7) 五、电机适配 (7) 电机适配 (7) 电机接线 (8) 供电电压和输出电流的选择 (8) 五、常见问题 (9) 应用中常见问题和处理方法 (9) 六、保修条款 (10)
一、产品简介 ◆概述 TB6600升级版驱动器是一款专业的两相混合式步进电机驱动器,可适配国内外各种品牌,电流在4.0A及以下,外径39,42,57mm的四线,六线,八线两相混合式步进电机。适合各种小中型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、拿放装置等。在用户期望低成本、大电流运行的设备中效果特性。 ◆特点 ※信号输入:单端,脉冲/方向 ※细分可选:1/2/4/8/16/32细分 ※输出电流:0.5A-4.0A ※输入电压:9-42VDC ※静止时电流自动减半 ※可驱动4,6,8线两相、四相步进电机 ※光耦隔离信号输入,抗干扰能力强 ※具有过热、过流、欠压锁定、输入电压防反接保护等功能 ※体积小巧,方便安装 ※外部信号3.3-24V通用,无需串联电阻 二、接口和接线介绍 ◆信号输入端 PUL+ PUL-脉冲输入信号。默认脉冲上升沿有效。为了可靠响应脉冲信号,脉冲宽度应大于1.2us。 DIR+ DIR-方向输入信号,高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少5us建立。电机的初始运行方向与电机绕组接线有关,互换任一相绕组(如A+、A-交换)可以改变电机初始运行方向。 ENA+ ENA-使能输入信号(脱机信号),用于使能或禁止驱动器输出。使能时,驱动器将切断电机各相的电流使电机处于自由状态,不响应步进脉冲。当不需用此功能时,使能信号端悬空即可。 ◆电机绕组连接 A+,A-电机A相绕组。 B+,B-电机B相绕组。
TB6560 3A步进电机驱动板说明
TB6560 3A步进电机驱动板说明 功能简介: 1)工作电压直流10V-35V。建议使用开关电源DC24V供电。 2)采用6N137高速光藕,保证高速不失步。 3)采用东芝TB6560AHQ全新原装芯片,内有低压关断、过热停车及过流保护电路,保证最优性能。 4)额定最大输出为:±3A,峰值3.5A。 5) 适合42,57步进3A以内的两相/四相/四线/六线步进电机,不适合超过3A的步进电机。 6)自动半流功能。
7)细分:整步,半步,1/8步,1/16步,最大16细分。 在同类产品中的特色: 1、电流级逐可调,满足你的多种应用需求。 2、自动半流可调。 3、采用6N137高速光藕,保证高速不失步。 4、电流采样电阻采用高精度、大功率电阻,保证电机稳定运行。 5、板印设置说明,不用说明书亦可操作。 6、采用厚密齿散热器,散热良好。 7、整机提供三年质量保证。
产品使用说明: 一、产品简介 1.概述 TB6560步进电机驱动器是由我公司自主研发的一款具有高稳定性、可靠性和抗干扰性的经济型步进电机驱动器,适用于各种工业控制环境。该驱动器主要用于驱动35、39、42、57 型4、6、8线两相混合式步进电机。其细分数有4 种,最大16细分;其驱动电流范围为0.3A-3A,输出电流共有14 档,电流的分辨率约为0.2A;具有自动半流,低压关断、过流保护和过热停车功能。 2.应用领域 适合各种中大型自动化设备,例如:雕刻机、切割机、包装机械、电子加工设备、自动装配设备等。 3.整机介绍 整机介绍主要对驱动器的设置、接口、指示灯及安装尺寸等相关说明。具体说明见下表: 驱动器操作说明 运行电流设置由 SW1-SW3、S1 四个拨码开关来设定驱动器输出电流,其输出电流共有14 档。具体输出电流的设置,请看电路板面版图说明。 停止电流设置用户可通过S2 来设置驱动器的自动半流功能。“1”表示停止电流设为运行电流的20%,“0”表示停止电流设为运行电流的50%。一般用途中应将S2 设成“1”,使得电机和驱动器的发热减少,可靠性提高。 细分设置由 S3-S4 两个拨码开关来设定驱动器细分数,其共有4档细分。用户设定细分时,应先停止驱动器运行。具体细分数的设置,请看电路板面版图说明。
步进电机基础知识_来自百度百科
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。 虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。步进电机概述 步进电机又称为脉冲电机,基于最基本的电磁铁原理,它是一种可以自由回转的电磁铁,其动作原理是依靠气隙磁导的变化来产生电磁转矩。年前后开始以控制为目的的尝试,应用于氢弧灯的电极输送机构中。这被认为是最初的步进电机。二十世纪初,在自动交换机中广泛使用了步进电机。由于西方资本主义列强争夺殖民地,步进电机在缺乏交流电源的船舶和飞机等独立系统中得到了广泛的使用。二十世纪五十年代后期晶体管的发明也逐渐应用在步进电机上,对于数字化的控制变得更为容易。到了八十年代后,由于廉价的微型计算机以 多功能的姿态出现,步进电机的控制方式更加灵活多样。 步进电机相对于其它控制用途电机的最大区别是,它接收数字控制信号电脉冲信号并 转化成与之相对应的角位移或直线位移,它本身就是一个完成数字模式转化的执行元件。而且它可开环位置控制,输入一个脉冲信号就得到一个规定的位置增量,这样的所谓增量位置 控制系统与传统的直流控制系统相比,其成本明显减低,几乎不必进行系统调整。步进电机 的角位移量与输入的脉冲个数严格成正比,而且在时间上与脉冲同步。因而只要控制脉冲的数量、频率和电机绕组的相序,即可获得所需的转角、速度和方向。 我国的步进电机在二十世纪七十年代初开始起步,七十年代中期至八十年代中期为成 品发展阶段,新品种和高性能电机不断开发,目前,随着科学技术的发展,特别是永磁材料、半导体技术、计算机技术的发展,使步进电机在众多领域得到了广泛应用。 步进电机控制技术及发展概况 作为一种控制用的特种电机,步进电机无法直接接到直流或交流电源上工作,必须使用专用的驱动电源步进电机驱动器。在微电子技术,特别计算机技术发展以前,控制器脉冲信 号发生器完全由硬件实现,控制系统采用单独的元件或者集成电路组成控制回路,不仅调试 安装复杂,要消耗大量元器件,而且一旦定型之后,要改变控制方案就一定要重新设计电路。这就使得需要针对不同的电机开发不同的驱动器,开发难度和开发成本都很高,控制难度较大,限制了步进电机的推广。
CNC步进电机控制器说明书
一、概述 CNC可编程步进电机控制器可与步进电机驱动器、步进电机组成一个完善的步进电机控制系统,能控制多台步进电机多段分时运行。 本控制器采用计算机式的编程语言,拥有输入、输出、计数、循环、条件转移、无条件转移、中断等多种指令。只需在控制器上按键选择指令和输入参数即可完成程序编程来控制电机运转和信号的输出以及被外部输入信号所控制,具有编程灵活、适应范围广等特点。 二、技术指标 1. 可控制3台步进电机(任意两台电机同时工作) 2. 可编180段程序指令(不同的工作状态) 3. 5条升降速曲线选择 4. 最高输出频率:10 KHz 5. 7个输入,4个输出 6. 数码显示,可显示当前的运行状态、循环次数、脉冲数等 7. 采用共阳接法,+5V输出,可直接驱动我厂生产的SH系列步进电机驱动器 三、控制器的显示及操作键 1.面板说明: 8位数码显示:作设定、循环作计数、运行状态、电机工作之用。
指示灯显示输入、输出、方向、脉冲等各种工作。 操作键多为复合键,在不同的状态下表示不同的功能。 2.接线说明: 具体接线可参考后面的完整流程。 1 )、OPTO、DIR、CP为步进电机驱动器控制线,此三端分别连至驱动器的OPTO、DIR、CP端: 其中:OPTO----所有驱动器折公共阳端 DIR0-----0号电机方向电平信号 CP0-------0号电机脉冲信号 DIR1-----1号电机方向电平信号 CP1-------1号电机脉冲信号
DIR2-----2号电机方向电平信号 CP2-------2号电机脉冲信号 ( 2 )、启动:启动程序自动运行,可接霍尔、光电、接近开关(输出为低电平)等信号端。相当于面板上启动 ( 3 )、停止:暂停正自动运行的程序,可接霍尔、光电、接近开关(输出为 低电平)等信号端,相当于面板上的停止键,再次按启动键后,程序继续运 行。停止端接线方式与启动端的接线方式一致。 ( 4 )、输入1、2、3、4、5:通用开关量输入端(见开关量输入电路图)。
【matlab编程代做】步进电机控制器设计
步进电机控制器设计报告 1.绪言 在本次EDA课程设计中,我们组选择了做一个步进电机驱动程序的课题。对于步进电机我们以前并未接触过,它的工作原理是什么,它是如何工作的,我们应该如何控制它的转停,这都是我们迫切需要了解的。 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 步进电机及驱动电源是互相联系的整体。步进电机驱动电源框图如图1所示。变频信号源产生频率可调的脉冲信号,调节步进电机的速度。脉冲分配器则根据要求把脉冲信号按一定的逻辑关系加到脉冲放大器上,使步进电机按确定的运行方式工作。 感应子式步进电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG 为感应子式步进电机代号)、57BYG、86BYG 、110BYG 、(国际标准),而像70BYG 、90BYG 、130BYG 等均为国内标准。 1.1 驱动控制系统组成 使用、控制步进电机必须由环形脉冲,功率放大等组成的控制系统。 1.1.1 脉冲信号的产生 脉冲信号一般由单片机或CPU 产生,一般脉冲信号的占空比为0.3-0.4 左右,电机转速越高,占空比则越大。 1.1.2 信号分配 感应子式步进电机以二、四相电机为主,二相电机工作方式有二相四拍和二相八拍二种,具体分配如下:二相四拍为,步距角为1.8 度;二相八拍为,步距角为0.9 度。四相电机工作方式也有二种,四相四拍为AB-BC-CD-DA-AB,步距角为1.8 度;四相八拍为 AB-B-BC-C-CD-D-AB,(步距角为0.9 度)。
5相步进马达驱动器使用说明书
T R系列簡易型 5相步進馬達驅動器 使用說明書 泰 ※本公司為促進產品性能的提昇,所進行的產品設計修改,將不個別通知,若有需要更詳細的資料,請洽各地營業所。
目 錄 1.產品規格 (1) 2.驅動器各部位功能說明 (2) 3.電流調整開關使用方法 (5) 4.接線圖 (6) 5.接線例及使用方法 (7) 6.尺寸圖及安裝方法 (9) ※本產品如有操作上或技術上疑問,歡迎上班時間洽詢本公司『技術諮詢專線:0800-450-168』,我們將竭誠為您服務!
1.產品規格 ●規格 驅動器型號 TR515B TR530B 驅動電流 0.36~1.4 A/相 0.75~2.8 A/相 適用馬達規格 0.75A/相 1.4A/相 0.75A/相 1.4A/相 2.8A/相 輸入電源 DC24~36V *1 MIN :1.5A 以上 DC24~36V *1MIN :3.0A 以上DC24~36V *1MIN :1.5A 以上DC24~36V *1 MIN :3.0A 以上 DC24~36V *1MIN :6.0A 以上 激磁方式 全步進(0.72? 4相激磁),半步進 (0.36? 4-5相激磁)〈可切換〉 信號輸出入方式 ●光耦合器(Photo Coupler)輸入介面 ●開集極電路(Open Collector) 輸出介面 CW 脈波輸入 2 pulse 時::正轉輸入,1 pulse 時:脈波輸入 CCW 脈波輸入 2 pulse 時:反轉輸入,1 pulse 時:運轉方向輸入 輸 入 信 號 H.OFF 輸入 激磁解除輸入(Holding Off) 輸 出 信 號 TIMING 輸出 激磁相原點時輸出 全步進時每10個脈波輸出一個信號 半步進時每20個脈波輸出一個信號 功 能 ●自動電流下降(ACD)●自我測試功能(TEST) ●步進角切換 (H/F)●脈波輸入方式切換(1P/2P) 保護功能 ●電源逆接保護:輸入電壓極性接反時自動斷流 ●過電流保護:輸入電流超過額定值時自動斷流 ●過熱保護:當驅動器超過80?C 時自動斷流*2 燈號顯示 電源,TIMING 外形尺寸 90 (L) ×65 (W) ×32 (H)mm 重量 270g 使用環境溫度範圍 0 ? C ~ 40 ? C *1. [a] 瞬間最大電壓為40V,平常使用請勿超過36V,以免造成驅動器損壞。 [b] 請依表格內建議,選用規格足夠的電源供應器。 *2.當過熱保護功能啟動時,電源指示燈會閃爍,馬達不激磁(注意馬達若使用在垂直 性負載時請做適當防護) 。要恢復激磁,必須關閉電源排除過熱原因後再重新啟動電源。
步进电机控制器-说明手册
步进电机,伺服电机可编程控制器KH-01使用说明 一、系统特点 ?控制轴数:单轴; ?指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制); ?最高输出频率:40KHz(特别适合控制细分驱动器); ?输岀频率分辨率:1Hz; ?编程条数:99条; ?输入点:6个(光电隔离); ?输岀点:3个(光电隔离); ? 一次连续位移范围:一7999999?7999999; ?工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态; ?升降速曲线:2条(最优化); ?显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示; ?自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止; ?手动运行功能:可调整位置(手动的点动速度和点动步数可设定); ?参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度; ?程序编辑功能:可任意插入、删除可修改程序。具有跳转行号、数据判零、语句条数超长和超短的判断功能; ?回零点功能:可双向自动回到零点; ?编程指令:共14条指令; ?外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作; ?电源:AC220V(电源误差不大于土15%。 一、前面板图 前面板图包括: 1、八位数码管显示 2、六路输入状态指示灯 3、三路输岀状态指示灯 4、CP脉冲信号指示灯 5、CW方向电平指示灯 6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只 去取功能之一表示按键。 后面板图及信号说明: 后面板图为接线端子,包括: 1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中: 脉冲------- 步进脉冲信号 方向------- 电机转向电平信号 +5V ---------- 前两路信号的公共阳端 CP CW勺状态分别对应面板上的指示灯 2、启动:启动程序自动运行,相当于面板上的启动键。 3、停止:暂停正在运行的程序,相当于面板上的停止键,再次启动后,程序继续运行。