嵌入式系统参考资料
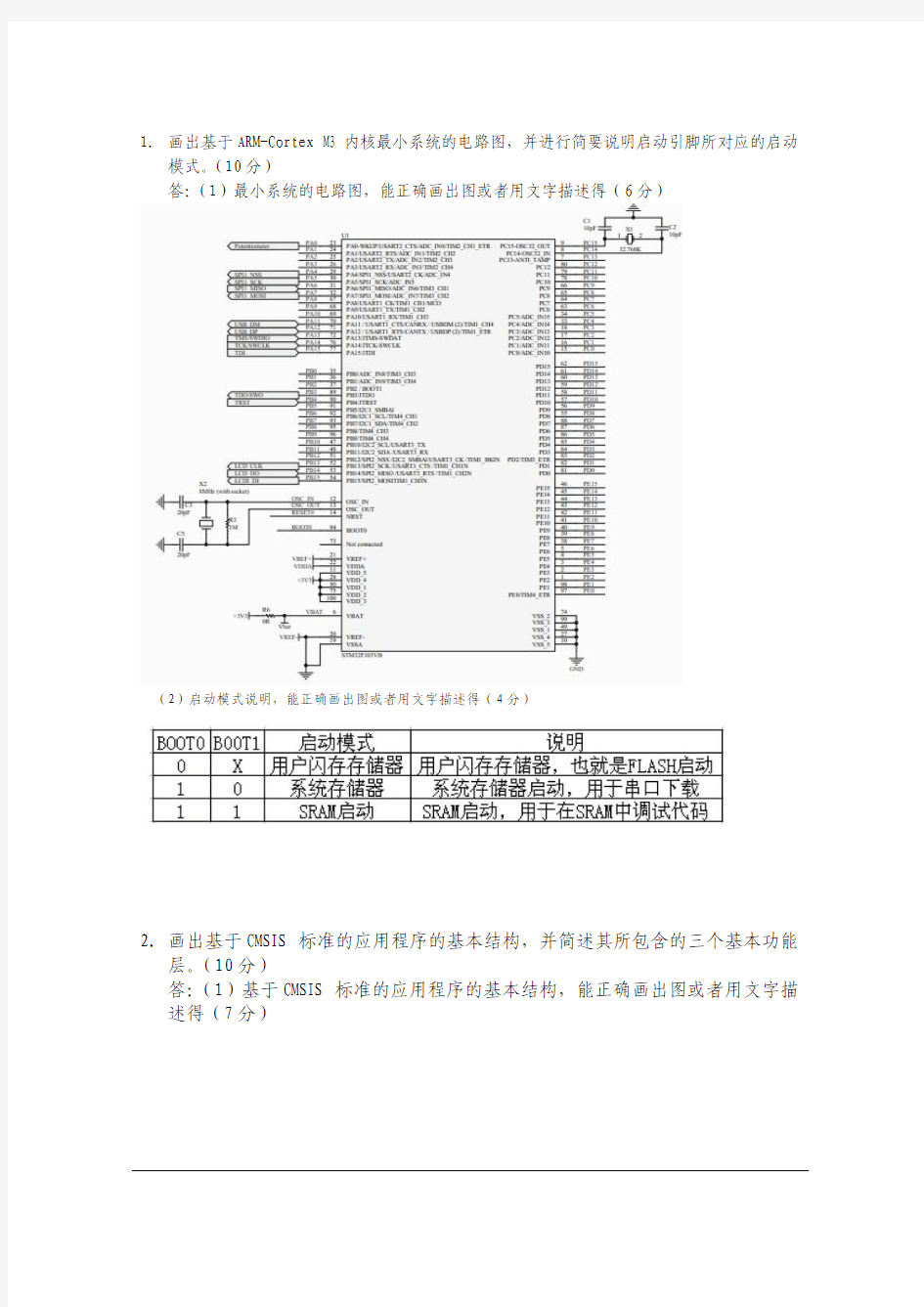

1.画出基于ARM-Cortex M3内核最小系统的电路图,并进行简要说明启动引脚所对应的启动
模式。(10分)
答:(1)最小系统的电路图,能正确画出图或者用文字描述得(6分)
(2)启动模式说明,能正确画出图或者用文字描述得(4分)
2.画出基于CMSIS标准的应用程序的基本结构,并简述其所包含的三个基本功能
层。(10分)
答:(1)基于CMSIS标准的应用程序的基本结构,能正确画出图或者用文字描述得(7分)
(2)CMSIS标准的三个基本功能层:(3分)
1. 内核设备访问层:包含用于访问内核寄存器设备的名称定义、地址定义和助手函数。同时也为RTOS定义了独立于微控制器的接口,该接口包括调试通道定义。
2.中间设备访问层:为软件提供了访问外设的通用方法。芯片供应商应当修改中间设备
访问层,对于中间设备访问层,芯片厂商需要根据自己的设备特性进行更新。
3.微控制器外设访问层:提供了片上所有外设的定义。
3. 画出STM32内部的总线结构。并简要说明AHB总线与SRAM、DMA及APB总线之间的关系。(10分)
答:(1)能正确画出图或者用文字描述得6分。
(2)AHB总线与SRAM、DMA及APB总线之间的关系(4分):
STM32的内部SRAM和DMA单元直接与AHB总线相连,外部设备则使用两条APB总线相连,每一条APB总线又都与AHB总线矩阵相连。
4. 在基于ARM-Cortex M3内核的芯片上编写程序实现如下功能。通过GPIO口引脚实现2个LED 灯交替实现闪烁,2个灯持续时间闪烁时间持续为1秒。(25分)1) 画出所需要的电路图。(5分)
2) 画出程序的流程图。(5分)
3) 配置Systick定时器,并使用Systick定时器实现1秒钟的延时功能,写出相应的程序。(5分)
方法:1:
SysTick_Config(72000000/ 2000);
void Delay(uint32_t nTime)
{
TimingDelay = nTime;
while(TimingDelay != 0);
}
void TimingDelay_Decrement(void)
{
if (TimingDelay != 0x00)
{
TimingDelay--;
}
}
方法2:
Systick_Configuration();
void Systick_Configuration(void)
{
/* 失能Systick定时器 */
SysTick_CounterCmd(SysTick_Counter_Disable);
/* 选择HCLK为Systick时钟源 */
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
/* 清除Systick计数器 */
SysTick_CounterCmd(SysTick_Counter_Clear);
/* 主频为72/8MHz,配置计数值为9000 * 1000可以得到1s定时间隔*/ SysTick_SetReload(9000 * 1000);
}
void Delay_Second(void)
{
/* 启动Systick计数 */
SysTick_CounterCmd(SysTick_Counter_Enable);
/* 等待Systick计数至0 */
while(SysTick_GetFlagStatus(SysTick_FLAG_COUNT) == 0);
/* 失能Systick定时器 */
SysTick_CounterCmd(SysTick_Counter_Disable);
/* 清除Systick计数器 */
SysTick_CounterCmd(SysTick_Counter_Clear);
}
4) 写出整个交替LED灯闪烁的程序。(10分)
#include "stm32f10x_lib.h"
void RCC_Configuration(void);
void GPIO_Configuration(void);
void Systick_Configuration(void);
void Delay_Second(void);
int main(void)
{
RCC_Configuration();
GPIO_Configuration();
/* 设置SyTtick定时器*/
Systick_Configuration();
while(1)
{
GPIO_WriteBit(GPIOA,
GPIO_Pin_4,
(BitAction)(1 - GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_4))
);//翻转GPIOA.4电平
Delay_Second(); //见前面的systick延时
}
}
void RCC_Configuration(void)
{
/* 定义枚举类型变量HSEStartUpStatus */
ErrorStatus HSEStartUpStatus;
/* 复位系统时钟设置*/
RCC_DeInit();
/* 开启HSE*/
RCC_HSEConfig(RCC_HSE_ON);
/* 等待HSE起振并稳定*/
HSEStartUpStatus = RCC_WaitForHSEStartUp();
/* 判断HSE起是否振成功,是则进入if()内部*/
if(HSEStartUpStatus == SUCCESS)
{
/* 选择HCLK(AHB)时钟源为SYSCLK 1分频*/
RCC_HCLKConfig(RCC_SYSCLK_Div1);
/* 选择PCLK2时钟源为HCLK(AHB)1分频*/
RCC_PCLK2Config(RCC_HCLK_Div1);
/* 选择PCLK1时钟源为HCLK(AHB)2分频*/
RCC_PCLK1Config(RCC_HCLK_Div2);
/* 设置FLASH延时周期数为2 */
FLASH_SetLatency(FLASH_Latency_2);
/* 使能FLASH预取缓存*/
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
/* 选择锁相环(PLL)时钟源为HSE 1分频,倍频数为9,则PLL输出频率为8MHz * 9 = 72MHz */ RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
/* 使能PLL */
RCC_PLLCmd(ENABLE);
/* 等待PLL输出稳定*/
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
/* 选择SYSCLK时钟源为PLL */
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
/* 等待PLL成为SYSCLK时钟源*/
while(RCC_GetSYSCLKSource() != 0x08);
}
/* 打开APB2总线上的GPIOA时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);
}
void GPIO_Configuration(void)
{
/* 定义GPIO初始化结构体GPIO_InitStructure */
GPIO_InitTypeDef GPIO_InitStructure;
/* 设置GPIOA.4 为推挽输出,最大翻转频率为50MHz*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
5.在基于ARM-Cortex M3内核的芯片上编写程序实现如下功能。使用按键与芯片管脚相连,配置两个外部中断,实现在中断0中,通过USART口,输出一个字符串。例如:interrupt 0;在中断1中,通过USART口,输出一个字符串。例如:interrupt 1;执行顺序是先是中断0,然后是中断1。
(1)画出所需要的电路图。(5分)
(2)画出程序的流程图。(5分)
(3)配置串口USART1,实现通过串口向PC机的串口助手打印一个字符串。例如:interrupt 0。写出相应的
程序。(5分)
在KEIL C Target option -> target中选择 useMicroLIB
void GPIO_Configuration(void)
{
/* 定义 GPIO 初始化结构体 GPIO_InitStructure */
GPIO_InitTypeDef GPIO_InitStructure;
/* 设置USART1的Tx脚(PA.9)为第二功能推挽输出模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA , &GPIO_InitStructure);
/* 设置USART1的Rx脚(PA.10)为浮空输入脚 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA , &GPIO_InitStructure);
}
void USART_Configuration(void)
{
USART_InitTypeDef USART_InitStructure;
USART_https://www.360docs.net/doc/3514267194.html,ART_BaudRate = 9600;
USART_https://www.360docs.net/doc/3514267194.html,ART_WordLength = USART_WordLength_8b;
USART_https://www.360docs.net/doc/3514267194.html,ART_StopBits = USART_StopBits_1;
USART_https://www.360docs.net/doc/3514267194.html,ART_Parity = USART_Parity_No ;
USART_https://www.360docs.net/doc/3514267194.html,ART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_https://www.360docs.net/doc/3514267194.html,ART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1 , &USART_InitStructure);
USART_Cmd(USART1 , ENABLE);
}
int fputc(int ch,FILE *f)
{
USART_SendData(USART1,(unsigned char)ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
return ch;
}
printf("\r\n interrupt 0");
(4)写出整个外部中断以及串口输出的程序。(与第3小题相重合的部分程序不需要再写出)(10分)
#include "stm32l1xx.h"
#include "stdio.h"
#include "discover_board.h"
#include "stm32l_discovery_lcd.h"
#include "stdarg.h"
/* Private function prototypes -----------------------------------------------*/
void RCC_Configuration(void);
void Init_GPIOs (void);
void Delay(uint32_t nTime);
void USART_Configuration(void);
void EXTI_Configuration(void);
void NVIC_Configuration(void);
int main(void)
{
/* Configure Clocks for Application need */
RCC_Configuration();
NVIC_Configuration();
Init_GPIOs();
USART_Configuration();
EXTI_Configuration();
while(1)
{
}
}
void Init_GPIOs (void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHBPeriphClockCmd(LD_GPIO_PORT_CLK|USERBUTTON_GPIO_CLK, ENABLE);
/* Configure User Button pin as input */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2;//USERBUTTON_GPIO_PIN GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_40MHz;
GPIO_Init(USERBUTTON_GPIO_PORT, &GPIO_InitStructure);
}
void EXTI_Configuration()
{
EXTI_InitTypeDef EXTI_InitStructure;
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA,EXTI_PinSource0);
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA,EXTI_PinSource1);
EXTI_InitStructure.EXTI_Line = EXTI_Line0|EXTI_Line1 ;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
}
void NVIC_Configuration()
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* Enable and set EXTI0 Interrupt to the lowest priority */
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void EXTI0_IRQHandler(void)
{
printf("\r\n interrupt 0");
EXTI_GenerateSWInterrupt(EXTI_Line1);
EXTI_ClearFlag(EXTI_Line0);
}
void EXTI1_IRQHandler(void)
{
printf("\r\n interrupt 1");
EXTI_ClearFlag(EXTI_Line1);
}
6.在基于ARM-Cortex M3内核的芯片上编写程序实现如下功能。定义一个32个整数的一维数组,配置DMA和CPU进行数据搬移,分别计算分别使用DMA和CPU来搬移这个数组所花的时间,并将这两个结果用串口传输到上位机显示。(20分)
1. 画出所需要的电路图。(5分)或者参见第五题去掉按键部分电路
2. 画出程序的流程图。(5分)
3. 写出DMA和CPU搬移数据的过程以及串口输出所花时间的程序。(10分)#include "stm32f10x_lib.h"
#include "stdio.h"
#include "string.h"
#define BufferSize 32
vu16 CurrDataCounter = 0; /* 定义DMA 传输数目变量*/
vu32 Tick = 0; /* 计时变量*/
uc32 SRC_Const_Buffer[BufferSize ] =
{
0x01020304,0x05060708,0x090A0B0C,0x0D0E0F10,
0x11121314,0x15161718,0x191A1B1C,0x1D1E1F20,
0x21222324,0x25262728,0x292A2B2C,0x2D2E2F30,
0x31323334,0x35363738,0x393A3B3C,0x3D3E3F40,
0x41424344,0x45464748,0x494A4B4C,0x4D4E4F50,
0x51525354,0x55565758,0x595A5B5C,0x5D5E5F60,
0x61626364,0x65666768,0x696A6B6C,0x6D6E6F70,
0x71727374,0x75767778,0x797A7B7C,0x7D7E7F80
};
u32 DST_Buffer[BufferSize ]; /* 在RAM 中开辟一片空间用做DMA目的空间*/ void RCC_Configuration(void);
void NVIC_Configuration(void);
void GPIO_Configuration(void);
void USART_Configuration(void);
void DMA_Configuration(void);
void SysTick_Configuration(void);
int main(void)
{
u8 i = 0;
u8 TickCntCPU = 0;
u8 TickCntDMA = 0;
RCC_Configuration();
/* 设置NVIC */
NVIC_Configuration();
/* 设置GPIO 端口*/
GPIO_Configuration();
/* 设置USART */
USART_Configuration();
/* DMA初始化*/
DMA_Configuration();
/* SysTick初始化*/
SysTick_Configuration();
Tick = 0;
for(i = 0; i < BufferSize; i++)
{
DST_Buffer[i] = SRC_Const_Buffer[i];
}
/* 保存计时数据*/
TickCntCPU = Tick;
for(i = 0; i < BufferSize; i++)
{
DST_Buffer[i] = 0;
}
Tick = 0;
DMA_Cmd(DMA1_Channel6, ENABLE);
/* 等待传输完成*/
while(CurrDataCounter != 0);
TickCntDMA = Tick;
if(strncmp((const char*)SRC_Const_Buffer, (const char*)DST_Buffer, BufferSize) == 0)
{
printf("\r\nTransmit Success!\r\n");
}
else
{
printf("\r\nTransmit Fault!\r\n");
}
printf("\r\nThe CPU transfer, time consume: %dus!\n\r", TickCntCPU);
printf("\r\nThe DMA transfer, time consume: %dus!\n\r", TickCntDMA);
while(1);
}
RCC_Configuration() /*在前面基础上增加开启DMA , USART1 和GPIOA 时钟*/ {
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
}
void NVIC_Configuration(void)
{
/* 定义NVIC初始化结构体NVIC_InitStructure */
NVIC_InitTypeDef NVIC_InitStructure;
/* #ifdef...#else...#endif结构的作用是根据预编译条件决定中断向量表起始地址*/
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
/* 开启DMA16通道中断控制,0级先占优先级,0级次占优先级*/
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel6_IRQChannel;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void DMA_Configuration(void)
{
DMA_InitTypeDef DMA_InitStructure;
DMA_DeInit(DMA1_Channel6);
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)SRC_Const_Buffer;
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)DST_Buffer;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = BufferSize;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Enable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Word;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Enable;
DMA_Init(DMA1_Channel6, &DMA_InitStructure);
DMA_ITConfig(DMA1_Channel6, DMA_IT_TC, ENABLE);
CurrDataCounter= DMA_GetCurrDataCounter(DMA1_Channel6);
}
嵌入式系统实验报告
实验报告 课程名称:嵌入式系统 学院:信息工程 专业:电子信息工程 班级: 学生姓名: 学号: 指导教师: 开课时间:学年第一学期
实验名称:IO接口(跑马灯) 实验时间:11.16 实验成绩: 一、实验目的 1.掌握 STM32F4 基本IO口的使用。 2.使用STM32F4 IO口的推挽输出功能,利用GPIO_Set函数来设置完成对 IO 口的配置。 3.控制STM32F4的IO口输出,实现控制ALIENTEK 探索者STM32F4开发板上的两个LED实现一个类似跑马灯的效果。 二、实验原理 本次实验的关键在于如何控制STM32F4的IO口输出。IO主要由:MODER、OTYPER、OSPEEDR、PUPDR、ODR、IDR、AFRH和AFRL等8个寄存器的控制,并且本次实验主要用到IO口的推挽输出功能,利用GPIO_Set函数来设置,即可完成对IO口的配置。所以可以通过了开发板上的两个LED灯来实现一个类似跑马灯的效果。 三、实验资源 实验器材: 探索者STM32F4开发板 硬件资源: 1.DS0(连接在PF9) 2.DS1(连接在PF10) 四、实验内容及步骤 1.硬件设计 2.软件设计 (1)新建TEST工程,在该工程文件夹下面新建一个 HARDWARE文件夹,用来存储以后与硬件相关的代码。然后在 HARDWARE 文件夹下新建一个LED文件夹,用来存放与LED相关的代码。 (2)打开USER文件夹下的test.uvproj工程,新建一个文件,然后保存在 LED 文件夹下面,保存为 led.c,在led.c中输入相应的代码。
(3)采用 GPIO_Set 函数实现IO配置。LED_Init 调用 GPIO_Set 函数完成对 PF9 和 PF10 ALIENTEK 探索者 STM32F407 开发板教程 119 STM32F4 开发指南(寄存器版) 的模式配置,控制 LED0 和 LED1 输出 1(LED 灭),使两个 LED 的初始化。 (4)新建一个led.h文件,保存在 LED 文件夹下,在led.h中输入相应的代码。 3.下载验证 使用 flymcu 下载(也可以通过JLINK等仿真器下载),如图 1.2所示: 图1.2 运行结果如图1.3所示:
嵌入式系统设计大作业
嵌入式系统设计大作业 学号:14020520009 姓名:罗翔 1、叙述JTAG接口在嵌入式开发中的作用。 答: (1)用于烧写FLASH 烧写FLASH的软件有很多种包括jatg.exe fluted flashpgm等等,但是所有这些软件都是通过jtag接口来烧写flash的,由于pc机上是没有jtag接口的,所以利用并口来传递信息给目标板的jtag接口。所以就需要并口转jtag接口的电路。 (2)用于调试程序 同时应该注意到jtag接口还可以用来调试程序。而调试程序(如ARM开发组件中的AXD)为了通过jtag接口去调试目标板上的程序,同样是使用pc的并口转jtag接口来实现与目标板的通信。这样,并口转jtag接口的电路就有了两种作用。 (3)仿真器 根据(1)和(2)的总结,并口转jtag接口的电路是两种应用的关键,而这种电路在嵌入式开发中就叫仿真器。并口转jtag接口的电路有很多种,有简单有复杂的,常见的仿真器有Wigger,EasyJTAG,Multi-ICE等。这些所谓的仿真器的内部电路都是并口转jtag接口,区别只是电路不同或使用的技术不同而已。 2、叙述嵌入式平台的搭建过程,以linux为例。 答: 1) 一:建立宿主机开发环境 建立交叉编译的环境即在宿主机上安装与开发板相应的编译器及库函数,以便能够在宿主机上应用开发工具编译在目标板上运行的Linux引导程序,内核,文件系统和应用程序 交叉编译:在特殊的环境下,把嵌入式程序代码编译成不同的CPU所对应的机器代码。
开发时使用宿主机上的交叉编译,汇编及链接工具形成可执行的二进制代码(该代码只能在开发板上执行),然后下载到开发板上运行 2) 下载和安装arm-Linux-gcc编译工具链下载最新的arm-Linux-gcc并解压至当前目录下 在系统配置文件profile中设置环境变量方法:直接在profile文件中加入搜索路径立即使新的环境变量生效:运行source命令,检查是否将路径加入到path,测试是否安装成功, 编译程序,测试交叉工具链 3) 配置超级终端minicom minicom是宿主机与目标板进行通信的终端:在宿主机Linux终端中输入:minicom-s或输入minicom然后按ctrl+A+O对超级终端minicom进行配置,再选择串口并配置串口,最后保存即可 4) 建立数据共享服务:NFS服务是Linux系统中经常使用的数据文件共享服务 5) 编译嵌入式系统内核:内核配置,建立依存关系,建立内核 6) 制作文件系统 3、给出现今有哪些用于嵌入式开发的芯片名称,他们分别是哪些公司的产品? 体系结构是什么? S3C2410X基于ARM的Sumsang; XscalePXA255/PXA270基于ARM的Intel; 摩托罗拉MC基于68k; Power 601基于Power PC; MIPS32Kc基于MIPS 4、现今较流行的嵌入式操作系统有哪些? 答: (1) VxWorks (2)wince (3)linux (4)android
嵌入式系统调研报告
VxWorks的版本与开发 姓名:李贻鹏 班级:软工12级5班 学号:U201217489
VxWorks简介 VxWorks 是美国Wind River System 公司推出的一个实时操作系统。Tornado 是WRS 公司推出的一套实时操作系统开发环境,类似MicrosoftVisual C,但是提供了更丰富的调试、仿真环境和工具。VxWorks 是美国Wind River System 公司(以下简称风河公司,即WRS 公司)推出的一个实时操作系统。Tornado 是WRS 公司推出的一套实时操作系统开发环境,类似MicrosoftVisual C,但是提供了更丰富的调试、仿真环境和工具。
VxWorks以其良好的可靠性和卓越的实时性被广泛地应用在通信、军事、航空、航天等高精尖技术及实时性要求极高的领域中,如卫星通讯、军事演习、弹道制导、飞机导航等。在美国的F-16、FA-18战斗机、B-2 隐形轰炸机和爱国者导弹上,甚至连1997年4月在火星表面登陆的火星探测器、2008年5月登陆的凤凰号,和2012年8月登陆的好奇号也都使用到了VxWorks上。 VxWorks特点与优点 广泛的连接性:连接性是物联网的关键要求,VxWorks支持行业领先的标准和协议,提供创新的高性能网络能力。VxWorks也可以增加连接协议,比如:USB、CAN、蓝牙、Continua以及模块性,该模块性有利于连接之前断开的设备,而无需重做其嵌入软件的核心系统。 完整的安全性:物联网要求普遍连接,而这种普遍连接会将设备与系统暴露在比以往更多的风险下。通过使用VxWorks,您可以利用一整套综合的内置安全功能,为您的内置系统设计必要的安全级别,这些安全功能适用于开发、启动与执行、运行、传输和空程/关机阶段。 可扩展与可升级结构:VxWorks具备的模块化和永不过时的结构将主内核与协议、应用和其他程序包分离开来。随着市场需求与标准的发展,您可以利用该结构为产品添加新的功能,而无需重新测试或检定整个系统。 风险更低的快速集成第三方技术:VxWorks具有无与伦比的第三方技术生态系统,提供经过验证、现成可用的各种解决方案。利用该生态系统,您可以开发出具有先进功能与性能的差异化产品,缩短上市时间、降低风险与开发成本。 升级更容易、检测更简单:新型模块化VxWorks结构可以让您瞬间完成程序包和编译程序的升级与漏洞修补,无需更换或重新检测包括操作系统核心在内的整个系统。 保证实时性能与可靠性:VxWorks是一套同时具备确定性与响应性的高性能实时操作系统,适用于最严格的时间限制。比如:美国国家航空航天局价值25亿美元的好奇号火星车成功着陆于距离地球3.52亿英里远的星球上,他们选择的控制系统就是VxWorks。 多核利益最大化:VxWorks提供综合多核处理器支持,其中包括非对称多处理(AMP)与对称多处理(SMP)操作系统配置与硬件优化多核加速性能。增加VxWorks微内核与风河(Wind River)管理程序技术,可以让您的内置系统硬件拥有更大灵活性。强大且灵活的多核性能与可伸缩性,让VxWorks成为了下一代智能内置连接系统优化体积、重量、功率和性能的最佳选择。
大作业设计报告书(嵌入式系统原理与开发)
大作业设计报告书 题目:嵌入式系统原理与开发 院(系):物联网工程学院 专业: 班级: 姓名: 指导老师: 设计时间: 10-11 学年 2 学期 20XX年5月
目录 1.目的和要求 (3) 2.题目内容 (3) 3.设计原理 (4) 4.设计步骤 (5) 4.1 交通指示灯设计 (5) 4.2 S3C44B0X I/O 控制寄存器 (6) 4.3 红绿灯过渡代码: (8) 4.4 电源电路设计 (10) 4.5 系统复位电路设计 (11) 4.6 系统时钟电路设计 (11) 4.7 JTAG 接口电路设计 (12) 4.8串口电路设计 (12) 5.引脚分类图 (13) 6.参考文献 (13)
1.目的和要求 ARM技术是目前嵌入式应用产业中应用十分广泛的先进技术,课程开设的目的在于使学生在了解嵌入式系统基础理论的前提下能够掌握ARM处理器的汇编语言和c语言的程序设计方法,掌握S3C44B0X芯片的基本硬件结构特点和接口设计方法,同时熟悉ARM开发环境,学习ARM的硬件设计和软件编程的基本方法,为今后从事相关的应用与研究打下基础。通过大作业要达到如下目的: 一、掌握ARM的开发工具使用和软件设计方法。 二、掌握ARM处理器S3C44B0X的原理和GPIO接口设计原理。 三、掌握C语言与的ARM汇编语言的混合编程方法; 四、培养学生选用参考,查阅手册及文献资料的能力。培养独立思考,深入研 究,分析问题、解决问题的能力。 五、通过课程设计,培养学生严肃认真的工作作风。 2.题目内容 题目:交通指示灯系统设计 功能描述: 1.用S3C44B0X的GPIO设计相关电路; 2.设计相关的软件并注释; 3.实现十字路口2组红、黄、绿交通灯交替显示。 编程提示: 1.交通灯可用发光二极管代替; 2.电路可部分参照实验电路; 3.时间控制可以使用软件循环编程解决。
详解嵌入式系统的发展特点及架构
详解嵌入式系统的发展特点及架构 随着电子产品的发展,嵌入式系统已经广泛地应用我们的生活的各个领域,例如:计算机、汽车、航天飞机等等。提到嵌入式系统首先联想到单片机,是的,MCU是最基础和常用的嵌入式系统。嵌入式系统与模拟电路或其他功能电路组成的SoC(System on Chip,片上系统)或SiP(System in Package,系统级封装)在手机、机顶盒等功能复杂的产品中的应用也越来越多。 嵌入式系统发展呈现如下特点:·由8位处理向32位过渡·由单核向多核过渡·向网络化功能发展·MCU、FPGA、ARM、DSP等齐头并进·嵌入式操作系统呈多元化趋势所有的嵌入式处理器都是基于一定的架构的,即IP核(Intellectual Property,知识产权),生产处理器的厂家很多,但拥有IP核的屈指可数。有自己的IP核,光靠卖IP核即可坐拥城池。嵌入式系统的架构有专有架构和标准架构之分,在MCU(微控制器)产品上,像瑞萨(Renesas)、飞思卡尔(Freescale)、NEC都拥有自己得专有IP核,而其他嵌入式处理器都是基于标准架构。 标准的嵌入式系统架构有两大体系,目前占主要地位的是所谓RISC(Reduced Instruction Set Computer,精简指令集计算机)处理器。RISC体系的阵营非常广泛,从ARM、MIPS、PowerPC、ARC、Tensilica等等,都是属于RISC处理器的范畴。不过这些处理器虽然同样是属于RISC体系,但是在指令集设计与处理单元的结构上都各有不同,因此彼此完全不能兼容,在特定平台上所开发的软件无法直接为另一硬件平台所用,而必须经过重新编译。 其次是CISC(Complex Instruction Set Computer,复杂指令集计算机)处理器体系,我们所熟知的Intel的X86处理器就属于CISC体系,CISC体系其实是非常低效率的体系,其指令集结构上背负了太多包袱,贪大求全,导致芯片结构的复杂度被极大的提升。过去被应用在嵌入式系统的X86处理器,多为旧世代的产品,比如说,工业计算机中仍可常见数年前早已退出个人计算机市场的Pentium3处理器。由于此世代的产品效能与功耗比可以说是过去X86体系的甜蜜点,加上已经被市场长久验证,稳定性高,故常被应用于效能需求不高,但稳定性要求高的应用中,如工控设备等产品。 1、RISC家族之ARM处理器 ARM 公司于1991年成立于英国剑桥,主要出售芯片设计技术的授权。目前,采用ARM技术智能财产(IP)核心的处理器,即我们通常所说的ARM处理器,已遍及工业控制、消费类电子产品、通信系统、网络系统、无线系统等各类产品市场,基于ARM技术的处理器应用约占据了32位RISC微处理器75%以上的市场,ARM技术不止逐步渗入到我们生活的各个方面,我们甚至可以说,ARM 于人类的生活环境中,已经是不可或缺的一环。 目前市面上常见的ARM处理器架构,可分为ARM7、ARM9以及ARM11,新推出的Cortex系列尚在进行开发验证,市面上还未有相关产品推出。ARM也是嵌入式处理器中首先推出多核心架构的厂商。ARM 首个多核心架构为ARM11 MPCore,架构于原先的ARM11处理器核心之上。ARM11核心是发布于2002年10月份,为了进一步提升效能,其管线长度扩展到8阶,处理单元则增加为预取、译码、发送、转换/MAC1、执行/MAC2、内存存取/MAC3和写入等八个单元,体系上属于ARM V6指令集架构。ARM11采用当时最先进的0.13μm制造制程,运行频率最高可达500到700MHz。如果采用90nm制程,ARM11核心的工作频率能够轻松达到1GHz以上—对于嵌入式处理器来说,这显然是个相当惊人的程度,不过显然1GHz在ARM11体系中不算是个均衡的设定,因此几乎没有厂商推出达到1GHz的ARM11架构处理器。 ARM11的逻辑核心也经过大量的改进,其中最重要的当属“静/动态组合转换的预测功能”。ARM11的执行单元包含一个64位、4种状态的地址转换缓冲,它主要用来储存最近使用过的转换地址。当采用动态转换预测机制而无法在寻址缓冲内找到正确的地址时,静态转换预测功能就会立刻接替它的位置。在实际测试中,单纯采用动态预测的准确率为88%,单纯采用静态预测机制的准确率只有77%,而ARM11的静/动态预测组合机制可实现92%的高准确率。针对高时脉速度带来功耗增加的问题,ARM11采用一项名为“IEM (Intelligent Energy Manager)”的智能电源管理技术,该技术可根据任务负荷情况动态调节处理器的电压,进而有效降低自身的功耗。这一系列改进让ARM11的功耗效能比得以继续提高,平均每MHz只需消耗0.6mW(有快取时为0.8mW)的电力,处理器的最高效能可达到660 Dhrystone MIPS,远超过上一代产品。至于ARM11 MPCore,其在架构上与ARM11同样属于V6指令体系。根据不同应用的需要,MPCore可以被配置为1-4个处理器的组合方式,根据官方资料,其最高性能约可达到2600 Dhrystone MIPS的程度。MPCore是标准的同质多核心处理器,组成MPCore的是4个基于ARM11架构的处理器核心,由于多核心设计的优点是在频率不变的情况下让处理器的性能获得明显提升,因此可望在多任务应用中拥有良好的表现,这一点很适合未来家庭消费电子的需要。例如,机顶盒在录制多个频道电视节目的同时,还可通过互联网收看数字视频点播节目、车内导航系统在提供导航功能的同时,仍然有余力可以向后座乘客播放各类视频码流等。 2、RISC家族之MIPS处理器 MIPS是美国历史悠久的RISC处理器体系,其架构的设计,也如美国人的性格一般,相当的大气且理想化。MIPS架构起源,可追溯到1980年代,斯坦福大学和伯克利大学同时开始RISC架构处理器的研究。MIPS公司成立于1984年,随后在1986年推出第一款R2000处理器,在1992年时被SGI所并购,但随着MIPS架构在桌面市场的失守,后来在1998年脱离了SGI,成为MIPS技术公司,并且在1999年重新制定公司策略,将市场目标导向嵌入式系统,并且统一旗下处理器架构,区分为32-bit以及64-bit两大家族,以技术授权成为主要营利模式。 MIPS除了在手机中应用得比例极小外,其在一般数字消费性、网络语音、个人娱乐、通讯、与商务应用市场有着相当不错的成绩,不过近年来因为其它IP授权公司的兴起,其占有比率稍有衰退。MIPS应用最为广泛的应属家庭视听电器(包含机顶盒)、网通产品以及汽车电子方面。对于MIPS,其核心技术强调的是多执行绪处理能力(Multiple issue,国内也通常称作多发射核技术,以下以此称谓)。一般来说,多核心与多发射是两个并不是互斥的体系,可以彼此结合,然而在嵌入式领域,ARM与MIPS这两大处理器IP厂商对这两个架构的态度不同,造成这两个架构在嵌入式市场上对抗的结果。 MIPS 的多发射体系为MIPS34K系列,此为32位架构处理器,从架构上来看,其实多发射核技术只是为了尽量避免处理单元闲置浪费而为的折衷手段,就是将处理器中的闲置处理单元,分割出来虚拟为另一个核心,以提高处理单元的利用率。在技术上,为了实现硬件多重处理,多核心与多发射两者对于软件最佳化的复杂度方面同样都比单核心架构来得复杂许多。34K核心能执行现有的对称式二路SMP操作系统(OSes)与应用软件,通过操作系统的主动管理,现有的应用软件也能善用多发射处理能力。它亦能应用在多个执行线程各自有不同角色的(AMP或非对称式多重处理)环境下。此外,34K核心能设定一或两个虚拟处理组件(VPE)以及多至5个线程内容(Thread Content),提供相当高的设计弹性。MIPS的多发射在任务切换时,有多余的硬件缓存器可以记录执行状态,避免切换任务时,因为必须重新加载指令,或者是重新执行某部分的工作,造成整个执行线程的延迟。不过即便能够达到同时执行多个任务的能力,多发射处理器本质上仍然是单核心处理器,在单一执行绪
(完整版)2014完整ARM嵌入式系统实验报告
郑州航空工业管理学院 嵌入式系统实验报告 (修订版) 20 – 20第学期 赵成,张克新编著
院系: 姓名: 专业: 学号: 电子通信工程系 2014年3月制
实验一ARM体系结构与编程方法 一、实验目的 了解ARM9 S3C2410A嵌入式微处理器芯片的体系结构,熟悉ARM微处理器的工作模式、指令状态、寄存器组及异常中断的概念,掌握ARM指令系统,能在ADS1.2 IDE中进行ARM汇编语言程序设计。 二、实验内容 1.ADS1.2 IDE的安装、环境配置及工程项目的建立; 2.ARM汇编语言程序设计(参考附录A): (1)两个寄存器值相加; (2)LDR、STR指令操作; (3)使用多寄存器传送指令进行数据复制; (4)使用查表法实现程序跳转; (5)使用BX指令切换处理器状态; (6)微处理器工作模式切换; 三、预备知识 了解ARM嵌入式微处理器芯片的体系结构及指令体系;熟悉汇编语言及可编程微处理器的程序设计方法。 四、实验设备 1. 硬件环境配置 计算机:Intel(R) Pentium(R) 及以上; 内存:1GB及以上; 实验设备:UP-NETARM2410-S嵌入式开发平台,J-Link V8仿真器; 2. 软件环境配置
操作系统:Microsoft Windows XP Professional Service Pack 2; 集成开发环境:ARM Developer Suite (ADS) 1.2。 五、实验分析 1.安装的ADS1.2 IDE中包括和两个软件组件。在ADS1.2中建立类型的工程,工程目标配置为;接着,还需要对工程进行、及链接器设置;最后,配置仿真环境为仿真方式。 2.写出ARM汇编语言的最简程序结构,然后在代码段中实现两个寄存器值的加法运算,给出运算部分相应指令的注释。 ; 文件名:
2016年下学期嵌入式系统设计大作业
嵌入式系统设计大作业 1、叙述嵌入式系统开发过程中所要解决的两个问题。 2、叙述嵌入式平台的搭建过程,以linux为例。 3、给出现今有哪些用于嵌入式开发的芯片名称,他们分别是哪些公司的产品? 体系结构是什么? 4、现今较流行的嵌入式操作系统有哪些? 5、PXA270嵌入式开发板的接口有哪些? 6、请写出Nor Flash和Nand Flash的区别。 7、冯。诺依曼架构与哈佛架构的区别。 8、单周期3级流水的情况下,第10个指令周期时,第几条指令执行结束? 9、下面是linux下的一个简单的设备驱动程序,写出linux设备驱动常用的数据结构,同时阅读下面代码,请给出测试程序中的每条语句加以注释。 设备驱动程序Keypad.c的源代码: #include
《嵌入式操作系统》实验报告
《嵌入式操作系统》实验报告 班级计算机 学号 姓名 指导教师庄旭菲
内蒙古工业大学信息工程学院计算机系 2018年6月 实验一Linux内核移植与编译实验 1. 实验目的 了解Linux 内核相关知识与内核结构 了解Linux 内核在ARM 设备上移植的基本步骤和方法 掌握Linux 内核裁剪与定制的基本方法 2. 实验内容 分析Linux 内核的基本结构,了解Linux 内核在ARM 设备上移植的一些基本步骤及常识。 学习Linux 内核裁剪定制的基本配置方法,利用UP-Magic210 型设备配套Linux 内核进行自定义功能(如helloworld 显示)的添加,并重新编译内核源码,生成内核压缩文件zImage,下载到UP-Magic210 型设备中测试。 3. 实验步骤 实验目录:/UP-Magic210/SRC/kernel/编译内核:在宿主机端为UP-Magic210 设备的Linux 内核编写简单的测试驱动(内核)程序并修改内核目录中相关文件,添加对测试驱动程序的支持。 (1)、使用vim 编辑器手动编写实验代码
内如如下: #include
嵌入式系统概论讲解
第一章嵌入式系统概论 参考习题 1、嵌入式系统本质上是什么系统? 答:从本质上讲,嵌入式系统中的计算机总是处于一种实时计算模式,也可以认为嵌入式计算机应具有某种实时性。也就是说,从嵌入式系统的广义概念考虑,嵌入式系统都可以看成是实时系统。 2、嵌入式系统开发与PC机软件开发的区别是什么? 答:嵌入式开发就是设计特定功能的计算机系统,形象的说就是开发一种嵌入在一个机器上实现特定功能的一个系统。PC的开发往往是上层应用程序,会更多的和业务流程,数据库,UI打交道。嵌入式的开发主要是和底层打交道,例如内存,NAND, 各种控制器,中断调度等等。当然现在也有很多需要在嵌入式设备上开发上层应用程序的需求了。 3、嵌入式系统基本概念? 答:嵌入式系统是以应用为中心,以计算机技术为基础,软硬件可配置,对功能、可靠性、成本、体积、功耗有严格约束的专用系统。这类系统一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统(可选择)以及应用程序等四个部分组成的。 4、嵌入式系统分类?
答:(1)按微处理器位数划分 按所采用的处理器位数,可以分为4位、8位、16位、32位和64位系统。 (2)按应用类别划分 可以简单地划分为信息家电、通信、汽车电子、航空航天、移动设备、军用电子、工业控制、环境监控等各种类型。 (3)按系统的实时性划分 硬实时系统、软实时系统和自适应实时。 (4)按工业界应用的复杂程度划分 简单单处理器系统 可扩展单处理器系统 复杂嵌入式系统 制造或过程控制中使用的计算机系统 第二章ARM嵌入式微处理器技术基础 参考习题 1、ARM32位指令、16位指令的特点。 答:ARM微处理器支持32位的ARM指令集和16位Thumb指令集,每种指令集各有自己的优点和缺点:ARM指令集效率高,但代码密度低;Thumb指令集具有较高的代码密度,却仍保持ARM的大多数性能上的优势,可看做ARM指令集的子集。
嵌入式系统实验报告
嵌入式系统实验报告文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]
大连理工大学 本科实验报告 课程名称:嵌入式系统实验 学院(系):电子信息与电气工程学部 专业:自动化 班级: 0804 学号: 学生姓名:何韬 2011年 11月 18日 大连理工大学实验报告 学院(系):电信专业:自动化班级: 0804 姓名:何韬学号:组: ___ 实验时间: 2011-11-12 实验室: d108 实验台: 指导教师签字:成绩: 实验二ARM的串行口实验 一、实验目的和要求 见预习报告 二、实验原理和内容 见预习报告 三、主要仪器设备
硬件:ARM嵌入式开发平台、用于ARM7TDMI 的JTAG 仿真器、PC机Pentium100 以上、串口线。 软件:PC 机操作系统win98、Win2000 或WinXP 、ARM SDT 或集成开发环境、仿真器驱动程序、超级终端通讯程序。 四、实验步骤 见预习报告 五、核心代码 在主函数中实现将从串口0接收到的数据发送到串口0() int main(void) { char c1[1]; char err; ARMTargetInit(); 通过调用OSTaskCreate()或OSTaskCreateExt()创建至少一个任务; . OSStart(); /ucos-ii/" /* uC/OS interface */ #include "../ucos-ii/add/" #include "../inc/" #include "../inc/sys/" #include "../src/gui/" #include <> #include <>
嵌入式系统项目报告
嵌入式系统项目报告 项目名称:基于DM3730的Android系统 启动过程分析和Logo移植
本次项目研究和开发的主要目的如下: (1)基于DM3730处理器研究Android系统的启动过程及其主要流程; (2)基于Android系统的启动流程init进程深入理解。 (3)移植Android系统启动过程中的Logo和相关动画; (4)修改Android系统的指定桌面,让系统启动后直接跳入自己的开发的应用程序。 2.项目开发内容 本次项目需要完成的主要内容有如下几点: (1)在Ubuntu11.04上下载Android专用源码,完成Android系统的软件开发环境的搭建; (2)在EVM37x开发板上搭建Android系统的硬件开发环境; (3)Android系统的init进程和init.rc文件简单解析; (4)Android系统启动的动画和Logo的修改; (5)Android系统桌面源码的修改,实现直接调入自己的应用程序。3.项目开发软硬件设备 (1)硬件平台:TI高性能处理器DM3730,TI核心开发板EM/AM37xx EVM板 (2)操作系统:Android ICS4.0.3 (3)PC端的开发平台:Ubuntu11.04 (4)开发所需的IDE :TI集成开发环境CCS5.1
4.1 项目开发前期准备 4.1.1 Android源码下载和编译 本项目是在Ubuntu宿主机上完成Android源码的下载和编译。在此之前需要完成以下工作,主要包括各种Android开发所需的插件,编译时所需的基础库以及开发调试的minicom终端等。 下载Android源码的过程和命令: Android源码的编译:包括环境变量的设定,x-loader、u-boot、Linux Kernel 以及Android文件系统。 环境变量: x-loader编译:
嵌入式系统基础作业
一、简要说明嵌入式系统产品的基本组成、嵌入式系统特点、嵌入式系统开发流程; 答:基本组成:可分为硬件和软件两个组成部分。其中硬件组成结构以嵌入式微处理机为中心,配置存储器I/O设备、通信模块以及电源等必要的辅助借口;软件组成结构包括应用层、OS层、BSP等。 特点:“专用”计算机系统;运行环境差异大;比通用PC系统资源少;功耗低、体积小、集成度高、成本低;具有完整的系统测试和可靠性评估体系;具有较长的生命周期;需要专用开发工具和方法进行设计;包含专用调试电路;多科学知识集成系统。 开发流程:(1)系统定义与需求分析阶段。(2)方案设计阶段。(3)详细设计阶段。(4)软硬件集成测试阶段。(5)系统功能性及可靠性测试阶段。 二、写出教材图1-1嵌入式系统的组成结构中各英文缩写的中文释义; 答:.OS:操作系统 API:应用程序接口 BSP:板级支持包 Boot:启用装载 HAL:硬件抽象层 SoC/SoPC:片上系统/片上可编程系统 GPIO:控制处理器输出接口 USB:通用串行总线 LCD:液晶显示器 ADC/DAC:模数转换和数模转换 FPGA/CPLD:现场可编程门阵列/复杂可编程逻辑器件 UART/IrDA:通用异步收发传输器/红外线接口 DMA:直接内存访问 CAN:控制器局域网络 Timer/RTC:定时器/实时时钟 MMU/Cache:内存管理单元/高速缓冲存储器
三、比较说明FLASH存储器中NOR型和NAND型FLASH的主要区别;比较说明RAM 存储器中SRAM和SDRAM的主要区别; 答:NORFlash的读取和我们常见的SDRAM的读取是一样,用户可以直接运行装载在NORFLASH里面的代码,这样可以减少SRAM的容量从而节约了成本。NANDFlash没有采取内存的随机读取技术,它的读取是以一次读取一块的形式来进行的,通常是一次读取512个字节,采用这种技术的Flash比较廉价。SRAM是靠双稳态触发器来记忆信息的;SDRAM是靠MOS电路中的栅极电容来记忆信息的。由于电容上的电荷会泄漏,需要定时给与补充,所以动态RAM需要设置刷新电路。但动态RAM比静态RAM集成度高、功耗低,从而成本也低,适于作大容量存储器。所以主内存通常采用SDRAM,而高速缓冲存储器(Cache)则使用SRAM,在存取速度上,SRAM>SDRAM。 四、说明嵌入式系统常见硬件平台种类、典型处理器型号; 答:典型的型号有MIPS处理器、PowerPC处理器、Sparc处理器、ARM处理器、Xtensa系列可配置处理器。 五、嵌入式系统中常用的接口或通信方式有RS232、RS485、BlueTooth、CAN、IrDA、GPRS、SPI、GSM、802.11、SPI、IIC、Ethernet、JTAG等,请根据通信介质是否无线或有线对其进行分类;请根据通信距离从近至远依次排序;请根据通信速度从慢至快依次排序; 答:无线:RS485、BlueTooth、CAN、IrDA、GPRS、GSM、802.11、Ethernet 有线:RS232、SPI、IIC、JTAG 传输距离:RS232、SPI、IIC、JTAG、BlueTooTh、IrDA、RS485、CAN、802.11、GSM、GPRS、Ethernet 传输速度:GSM、GPRS、Blueteeth、IrDA、802.11、CAN、RS232、RS485、Ethernet、IIC、SPI、JTAG 六、列举常见嵌入式操作系统及其特点; 答:源代码公开并且遵循GPL协议 有大量的免费的优秀的开发工具,且都遵从GPL,是开放源代码的。
归纳嵌入式系统概论习题
第一题单项选择题 1、ADDS R0,R1,R2执行完成后,不会对CPSR中的哪一位产生影响( B)? A、N B、C C、V D、F 2、FD表示( B )。 A、满递增堆栈 B、满递减堆栈 C、空递增堆栈 D、空递减堆栈 3、已知R0=0xFFFFFC0F,则执行MVN R1,R0后,R1的值为(C )。 A、0xFFFFFFFF B、0xFFFFFFF0 C、0x3F0 D、0x3F 4、在Linux中使用ls命令显示当前目录的所有内容应使用(A)参数? A、-l B、-a C、-d D、-i 5、在EMBEST IDE开发环境中,程序的默认入口地址为( C )。 A、0x C000 B、0x 1C00 C、0x 8000 D、0x 0 6、已知R0=0x1000,R1=0x2000则执行CMP R0,R1后,R0的值为(B) A、0x2000 B、0x1000 C、0xFFFFF000 D、0xFFFFEFFF 7、已知R1=0x2F,则执行mov R0,R1,ASL #2后,R0的值为(D )。 A、0xBC B、0xBF C、0x2F0 D、0x2F 8、在Linux中查看文件前10行内容的命令是( D)。 A、less B、cat C、tail D、head 9、已知R0=0xFC,则执行BIC R0,#0x3C后,R0的值为( D )。 A、0x18 B、0x24 C、0xC0 D、0x30 10、已知R0*R1=0x1C2F3E4D5C6B,则执行SMULL R2,R3,R0,R1后,R2和R3的值分别为(D)。 A、R2=0x1C2F3E4D R3=0x5C6B B、R2=0x5C6B R3=0x1C2F3E4D C、R2=0x1C2F R3=0x3E4D5C6B D、R2=0x3E4D5C6B R3=0x1C2F 11、EMPU是( B )。 A、嵌入式微控制器 B、嵌入式微处理器 C、片上系统 D、嵌入式数字信号处理器 12、以下不属于CPSR的条件码标志位的是(A)。 A、F B、N C、Z D、C 13、S3C44B0X的内核工作电压是( B )。 A、3.0V B、2.5V C、3.5V D、 1.5V 14、Linux中删除目录的命令是(B)。 A、rm B、 rmdir C、mkdir D、del 15、能实现ARM处理器在两种工作状态之间进行切换的命令是( D )。 A、B B、 BL C、 BLX D、BX 16、若CPSR寄存器的低5位(4-0)的值为10010,则ARM处理器工作于(B) 模式。 A、FIQ B、IRQ C、USER D、SVC
嵌入式系统论文报告
华东理工大学2005—2006学年第1学期 《嵌入式系统及实验》课程读书报告 2005.10 班级:学号:姓名: 开课学院:任课教师:成绩:
一.嵌入式系统的定义 根据IEEE(国际电气和电子工程师协会)的定义,嵌入式系统是控制、监视、或者辅助设备机器和车间运行的装置(原文为devices used to control,monitor,or assist the operation of equipment machinery or plants),这主要是从应用上加以定义的,从中可以看出嵌入式系统是软件和硬件的综合体,还可以涵盖机械等附属装置。不过,上述定义并不能充分体现出嵌入式系统的精髓。目前国内一个普遍被认同的定义是:以应用为中心,以计算机技术为基础,软件硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。同时还应该看到,嵌入式系统本身还是一个外延极广的名词。凡是与产品结合在一起的具有嵌入式特点的控制系统都可以叫嵌入式系统,而且有时很难给它下一个准确的定义。现在人们讲嵌入式系统时,某种程度上是指近些年来比较热的具有操作系统的嵌入式系统. 嵌入式系统已经深入到我们生活的每一个角落,应该肯定地讲我们每一位在现代生活中无时无刻不在使用着嵌入式系统有关的产品,它所涉及的领域广泛到我们的想象力能及的任何地方,如下图所示,嵌入式系统的产品部分分布图。ARM ( AdvancedRISCMachines)公司是全球领先的16/32位嵌入式系统微处理器知识产权设计供应商,它通过转让高性能、低成本、低功耗的RISC微处理器、外围和系统芯片设计技术给合作伙伴,使他们能用这些技术来生产各具特色的芯片,目前,我国也有几家科研单位和企业开始购买ARM的知识产权来生产ARM芯片,通过这种途径,使我国迅速掌握IC 核心技术,加快我国IC技术的发展。ARM已成为移动通信、手持设备、多媒体数字消费嵌入式解决方案的RISC标准,据统计,在移动通信中,80%的微处理器是ARM. ARM处理器有三大特点:小体积、低功耗、低成本而高性能;16/32位双指令集;全球众多的合作伙伴。ARM所有这些优点使ARM的应用越来越普及。继 PC 产业之后,嵌入式系统领域显然已经成为了另一种科学,也由于网络与通讯的高速发展,带动了信息家电,信息工业的潮流,嵌入式系统己经成为不可或缺的产品,而且,它的发展方向是功能越来越强大,综合数字处理能力、管理能力、控制能力、通讯能力为一体的系统。因此,基于ARM 的嵌入式系统的研究具有重要的目的和意义.
嵌入式系统大作业
嵌入式系统大作业-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
基于嵌入式系统的车载GPS导航系统的设计 1 设计目的与功能 1.1 设计目的 随着人们经济基础增强,安全意识增强的基础上,很多人都会选择车载GPS 导航设备,所以制造功能强大,价格低廉的车载GPS导航设备是有很大市场和发展前景的。由于导航仪投入小,外壳模块、芯片等材料市场供应量大,这也是我选择设计车载GPS导航设备的理由。为了满足不同用户的不同需求,我想设计一款内置四维地图系统。 1.2设计功能 1提供准确无误的全3D实景导航; 2附带全国沿途咨询; 3具有视频、音乐播放等娱乐功能。 2.需求分析调研 2.1 产品的硬件组成(型号、类型、电气特性、选择的理由等) (1)处理器:S3C2440A 400MHz,S3C2440A 是三星公司生产推出的基于ARM920T的32位RISC嵌入式微处理器,S3C2440A采用了ARM920T的内核,0.13um的CMOS标准宏单元和存储器单元。 采用ARM920T CPU内核支持ARM调试体系结构。 (2)储存模块:SDRAM , K4M561633-75 , 64MByte Nand FLASH, K9F1208G 64MByte同步动态随机存储器,工作需要同步时钟,内部的命令的发送与数据的传输都以它为基准;存储阵列需要不断的刷新来保证数据不丢失;数据不是线性依次存储,而是自由指定地址进行数据读写。 (3)音频模块:PHILIPS公司的UDA1341TS是一块功能强大的专用语音处理芯片。本设计使用的AT91RM9200处理器具有一个IIS音频接口,此接口
嵌入式系统架构发展趋势及比较分析
嵌入式系统架构发展趋势及比较分析 范虎 嵌入式系统已经广泛地应用到当今各个领域,与我们的生活息息相关,小到掌上的数字产品,大到汽车、航天飞机。提到嵌入式系统我们很快会联想到单片机,不错,MCU是最基础和常用的嵌入式系统,但是目前像FPGA、ARM、DSP、MIPS 等其他嵌入式系统应用也越来越广泛。 总的来说,嵌入式系统发展呈现如下特点:·由8位处理向32位过渡·由单核向多核过渡·向网络化功能发展·MCU、FPGA、ARM、DSP等齐头并进·嵌入式操作系统呈多元化趋势,所有的嵌入式处理器都是基于一定的架构的,即IP 核(IntellectualProperty,知识产权),生产处理器的厂家很多,但拥有IP 核的屈指可数。嵌入式系统的架构有专有架构和标准架构之分,在MCU(微控制器)产品上,像瑞萨(Renesas)、飞思卡尔(Freescale)、NEC等都拥有自己的专有IP核,而其他嵌入式处理器都是基于标准架构。 标准的嵌入式系统架构有两大体系,目前占主要地位的是所谓RISC (ReducedInstructionSetComputer,精简指令集计算机)处理器。RISC体系的阵营非常广泛,从ARM、MIPS、PowerPC、ARC、Tensilica等等,都是属于RISC 处理器的范畴。不过这些处理器虽然同样是属于RISC体系,但是在指令集设计与处理单元的结构上都各有不同,因此彼此完全不能兼容,在特定平台上所开发的软件无法直接为另一硬件平台所用,而必须经过重新编译。 其次是CISC(ComplexInstructionSetComputer,复杂指令集计算机)处理器体系,我们所熟知的Intel的X86处理器就属于CISC体系,CISC体系其实是比较低效率的体系,但由于其已经被市场长久验证,稳定性高,故常被应用于效能需求不高,但稳定性要求高的应用中,如工控设备等产品。 下面将简单介绍一下几种比较常见的RISC和CISC嵌入式系统架构。 1、RISC家族之ARM处理器 ARM公司于1991年成立于英国剑桥,主要出售芯片设计技术的授权。目前,采用ARM技术(IP)核心的处理器,即我们通常所说的ARM处理器,已遍及工业控制、消费类电子产品、通信系统、网络系统、无线系统等各类产品市场,基于ARM技术的处理器应用约占据了32位RISC微处理器75%以上的市场。 目前市面上常见的ARM处理器架构,可分为ARM7、ARM9,ARM11以及Cortex 系列。ARM也是嵌入式处理器中首先推出多核心架构的厂商。ARM首个多核心架构为ARM11MPCore,架构于原先的ARM11处理器核心之上。ARM11采用当时最先进的0.13μm制造制程,运行频率最高可达500到700MHz。如果采用90nm制程,ARM11核心的工作频率能够轻松达到1GHz以上—对于嵌入式处理器来说,这显然是个相当惊人的程度。