基于虚拟仪器的图像采集处理及仪器控制
第32卷增刊2006年8月光学技术
O PT I C A L T E C H N I Q U E
V01.32Sup pl.
A u gust2006
文章编号:1002—1582(2006)S-0422.03
基于虚拟仪器的图像采集处理及仪器控制+
周秀荣,尚凯文,崔小虹,邢冀川
(北京理工大学光电工程系,北京100081)
摘要:针对激光测距机三光轴平行度调校,提出了由C C D摄像机摄取激光光斑图像,然后用图像采集与处理方法计算白光十字线中心与光斑中心偏差的方法,并对选用的图像处理算法进行了论述。此外,采用可变固定衰减片方法测量激光测距机接收系统的灵敏度。以LabV I E W为软件平台,开发出检测激光光轴中心及控制衰减器的虚拟仪器系统。该系统具有直观形象,使用方便,可移植性强等优点。
关键词:虚拟仪器;L abV l E W;图像采集;数字图像处理;仪器控制
中图分类号:TN911.72文献标识码:A
I m age acqui s i t i on and pr ocessi ng a nd i nst r um e nt
cont r ol ba se d on vi r t ual i ns t r um ent
Z H O U X i u—r ong,S H A N G K ai.w e n,C U I X i ao-hong,X l N G Ji.chua n
(D e par t m e nt of O pt o-el ec t r oni c E nge nee r i ng,Bei j i ng I ns t i t ut e of T e chnol ogy,Bei j i ng100081,C hi na)
A b st r act:I n or der t O m ea sure t he t hree-l ight.axi s paral l el it y of l as er t e l e m e t er,w e u s e C C D t o get l as er s pot i m a ge a nd t h en cap t ur e and pr o cess t he i m a ge t o cal cu l at e t he pos i ti on er r or bet w e en t he cent er of w hi t e l i ght cr os s l i ne and t hat of t he spot
and exp l ai n s el ect ed i m a ge pr oces si ng ar i t hm et i cs.B esi des,di f f er ent at t enu at or s ar e appl i e d t o m ea s u r e t he s en s i t i vit y of re e ei v—el".W e s el e ct LabV l E W as so f t w ar e t O de vel op vi rt ual i nst r um ent s ys t e m s t o gai n t he cent er of l as er axi s and cont r o l t he a t te nu—at o r.T h i s s yst e m i s i ntui t i o ni s ti c a nd conve ni ent t o l i s a and ca n be r eu sed i n di f f er ent appl i cat ions.
K e y w or ds:vi r t u al i nst r um ent;LabV I EW;i m age acqui si t i o n;di gi t al i m a ge pr oces si ng;i nst r um en t cont r ol
1激光测距机三轴平行度调校系统整体方案
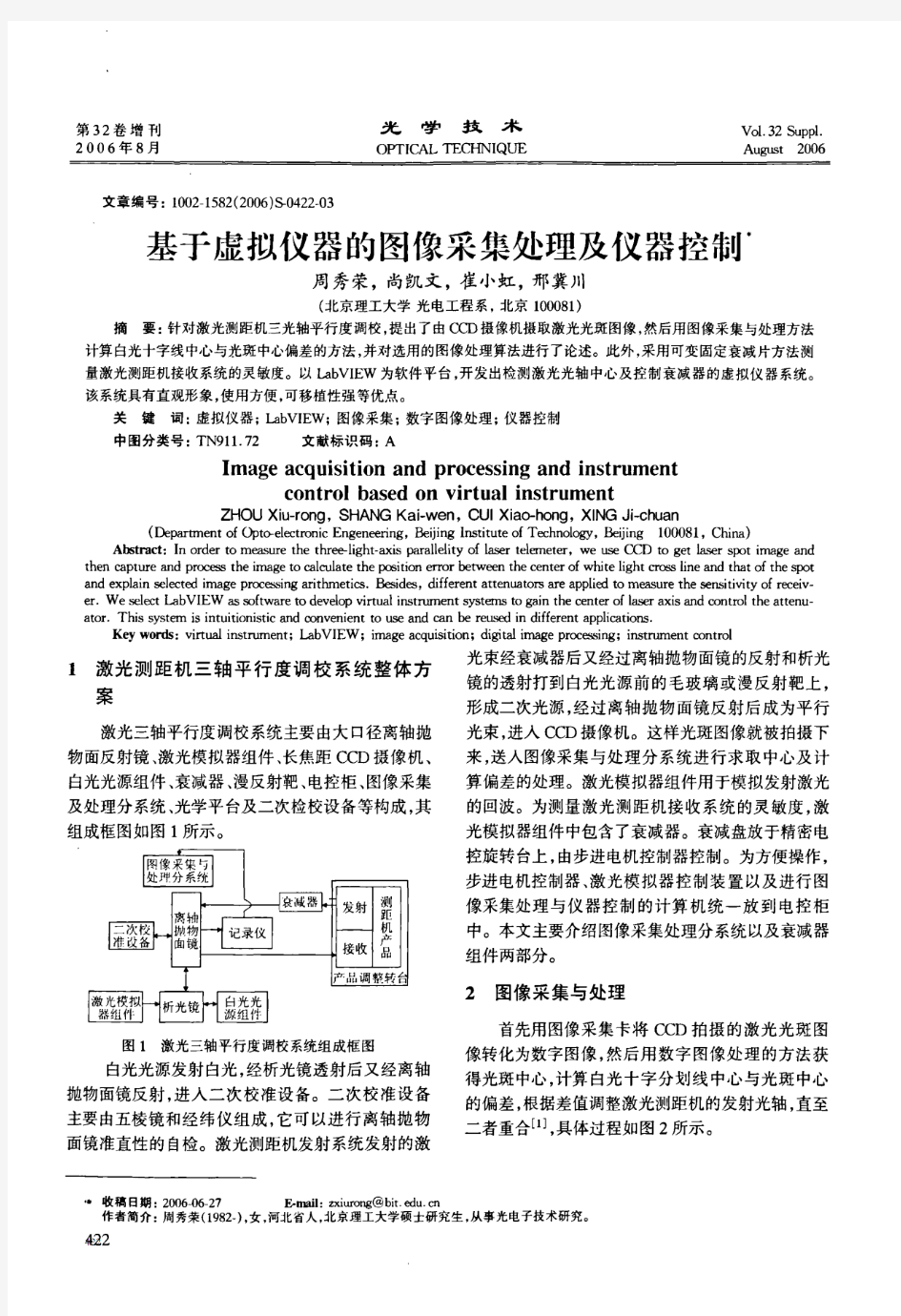
激光三轴平行度调校系统主要由大口径离轴抛物面反射镜、激光模拟器组件、长焦距C CD摄像机、白光光源组件、衰减器、漫反射靶、电控柜、图像采集及处理分系统、光学平台及二次检校设备等构成,其组成框图如图1所示。
图1激光三轴平行度调校系统组成框图
白光光源发射白光,经析光镜透射后又经离轴抛物面镜反射,进入二次校准设备。二次校准设备主要由五棱镜和经纬仪组成,它可以进行离轴抛物面镜准直性的自检。激光测距机发射系统发射的激光束经衰减器后又经过离轴抛物面镜的反射和析光镜的透射打到白光光源前的毛玻璃或漫反射靶上,形成二次光源,经过离轴抛物面镜反射后成为平行光束,进入C C D摄像机。这样光斑图像就被拍摄下来,送人图像采集与处理分系统进行求取中心及计算偏差的处理。激光模拟器组件用于模拟发射激光的回波。为测量激光测距机接收系统的灵敏度,激光模拟器组件中包含了衰减器。衰减盘放于精密电控旋转台上,由步进电机控制器控制。为方便操作,步进电机控制器、激光模拟器控制装置以及进行图像采集处理与仪器控制的计算机统一放到电控柜中。本文主要介绍图像采集处理分系统以及衰减器组件两部分。
2图像采集与处理
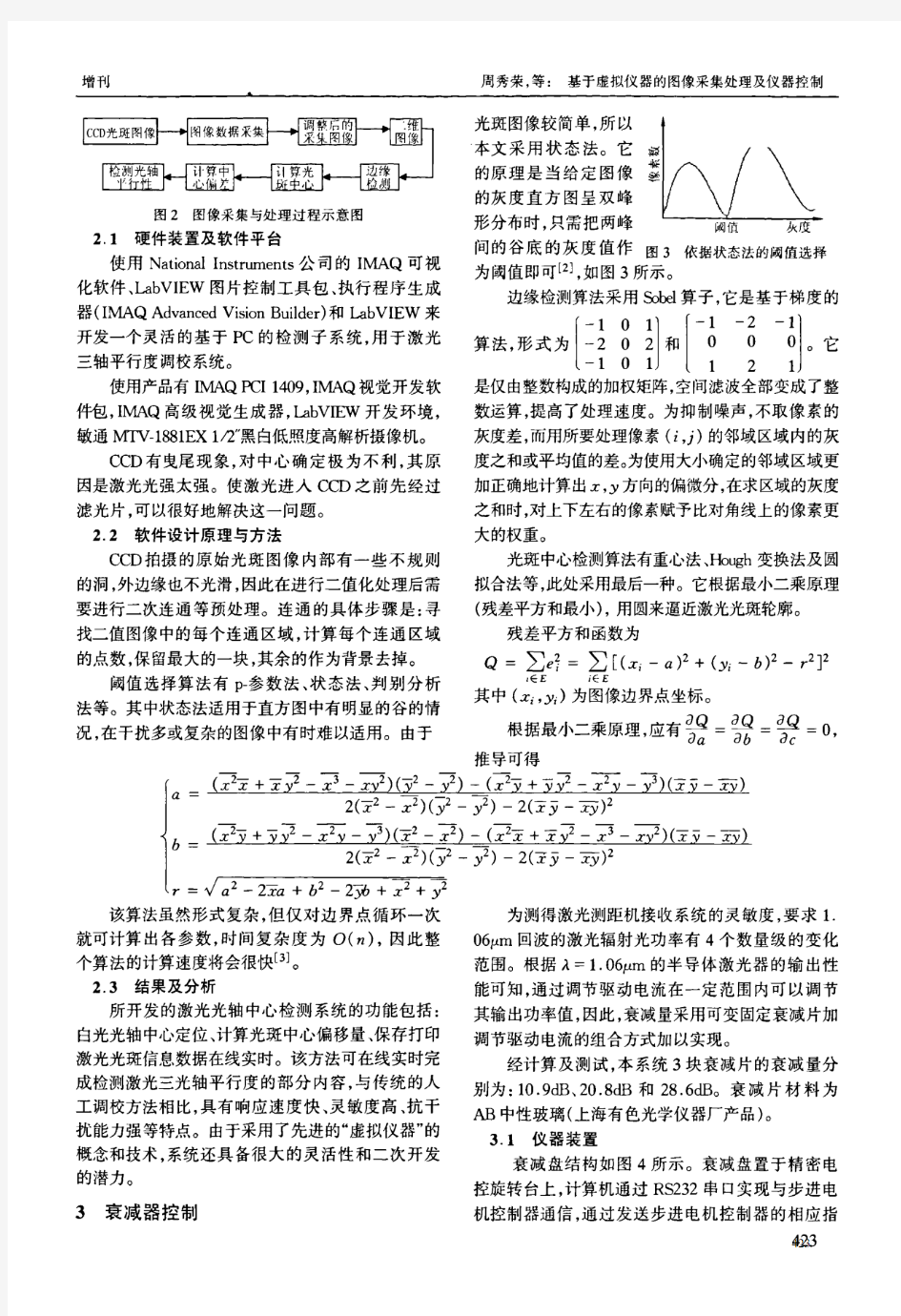
首先用图像采集卡将C C D拍摄的激光光斑图像转化为数字图像,然后用数字图像处理的方法获得光斑中心,计算白光十字分划线中心与光斑中心的偏差,根据差值调整激光测距机的发射光轴,直至二者重合‘l I,具体过程如图2所示。
_收稿日期:2006—06—27E-m a i l:zx i ur ong@bi t edu.cn
作者简介:周秀荣(1982一),女,河北省人,北京理工大学硕士研究生,从事光电子技术研究。422
增刊周秀荣,等:基于虚拟仪器的图像采集处理及仪器控制
图2图像采集与处理过程不意图
2.1硬件装置及软件平台
使用N at i ona l I ns t r um ent s公司的I M A Q可视化软件、hbV I Ew图片控制工具包、执行程序生成器(I M A Q A dva nce d V i si on B ui l der)和L abV I E W来开发一个灵活的基于P C的检测子系统,用于激光三轴平行度调校系统。
使用产品有I M A Q P C I1409,I M A Q视觉开发软件包,I M A Q高级视觉生成器,L abvI EW开发环境,敏通MⅣ-1881Ex1/2”黑白低照度高解析摄像机。
C C D有曳尾现象,对中心确定极为不利,其原因是激光光强太强。使激光进入C C D之前先经过滤光片,可以很好地解决这一问题。
2.2软件设计原理与方法
C C D拍摄的原始光斑图像内部有一些不规则的洞,外边缘也不光滑,因此在进行二值化处理后需要进行二次连通等预处理。连通的具体步骤是:寻找二值图像中的每个连通区域,计算每个连通区域的点数,保留最大的一块,其余的作为背景去掉。
阈值选择算法有p一参数法、状态法、判别分析法等。其中状态法适用于直方图中有明显的谷的情况,在干扰多或复杂的图像中有时难以适用。由于光斑图像较简单,所以
本文采用状态法。它彝的原理是当给定图像篓的灰度直方图呈双峰
f。一(兰!至±至.型!二兰!二互芏12(互!二型!)二(墨互±夏.芏!二羔:.型二型12(至至二至夏! I口一2(i2一一X2)(了2一一y2)一2(Y y一‘3r y)2
_{^一(兰!豆±互型!二兰!.型二型12(至!=墨12二(羔!至±至.型!二墨!二型:2(至歪二至夏) I口一2(i2一≯)(了2—7)一2(了歹一面)2
【r:以万忑i_万ji了丽
该算法虽然形式复杂,但仅对边界点循环一次就可计算出各参数,时间复杂度为O(咒),因此整个算法的计算速度将会很快【3J。
2.3结果及分析
所开发的激光光轴中心检测系统的功能包括:自光光轴中心定位、计算光斑中心偏移量、保存打印激光光斑信息数据在线实时。该方法可在线实时完成检测激光三光轴平行度的部分内容,与传统的人工调校方法相比,具有响应速度快、灵敏度高、抗干扰能力强等特点。由于采用了先进的“虚拟仪器”的概念和技术,系统还具备很大的灵活性和二次开发的潜力。
3衰减器控制
为测得激光测距机接收系统的灵敏度,要求1.06肛m回波的激光辐射光功率有4个数量级的变化范围。根据A=1.06#m的半导体激光器的输出性能可知,通过调节驱动电流在一定范围内可以调节其输出功率值,因此,衰减量采用可变固定衰减片加调节驱动电流的组合方式加以实现。
经计算及测试,本系统3块衰减片的衰减量分别为:10.9dB、20.8dB和28.6ci Ej。衰减片材料为A B中性玻璃(上海有色光学仪器厂产品)。
3.1仪器装置
衰减盘结构如图4所示。衰减盘置于精密电控旋转台上,计算机通过R S232串口实现与步进电机控制器通信,通过发送步进电机控制器的相应指
423
光学技术第32卷
令,控制精密电控旋转台带动衰减片转动,仪器装置示意图如图5所示。此装置中采用的步进电机控制器为北京光学仪器厂生产的208dB//一、\PI:28.6dI 内畎蛔裂’10.9dB\~—78两图4衰减盘结构示意图
SC l00型步进电机控制器,它具有一个R S232口和三个与电控旋转台的接口(X轴、y轴、Z轴三个方向),本项目中用一个方向的控制即可,选择X轴。
图5衰减器控制装置示意图
3.2软件设计
根据需要,步进电机控制器的控制旋钮有四个档位,对应三个衰减片和一个空档,选择不同的档位就有不同的衰减片进入光路。实际上,SC l00步进电机控制器本身自带控制面板,可以实现速度设置、位移量设置等功能,但是位移以步为单位,而此处要求每次旋转的位移量对应的角度为90。、180。或270。,为达到此要求,每次设定位移量之前还要进行计算转换,操作起来不够简便,也不够形象直观。所以,开发虚拟仪器控制面板十分必要。
编写L吣V I Ew程序,实现了衰减片选择、紧急情况停止精密电控旋转台、速度设置及查询功能,图6为精密电控旋转台控制程序流程图。
程序中,首先查询步进电机控制器是否处于联机状态,只有处于联机状态,才能用虚拟面板实现控制。接下来,查询控制器的当前位置,此操作是为了计算并记录下次转动的目标位置,以便处理紧急停止旋转台的情况。然后,设定串口通信的参数,如波特率、奇偶位、停止位等。之后,把相应指令放人串口进行发送,循环监控串口返回的指令,一旦确定串口正确接收到指令或超时或紧急停止按钮按下,就退出循环,关闭串口。如果是紧急停止按钮按下退出的情况,则计算距目标位置的剩余位移量,以供下
图6衰减器控制程序流程图
次选择档位后使用。
3.3结果与分析
衰减片选择旋钮拨到某一档,可以使相应的衰减片进入光路;按下停止按钮可以停止正在旋转的精密电控旋转台;速度查询和速度设置按钮分别对应设置和查询旋转台速度的功能。该面板使操作变得简便、直观。
4结论
设计出的激光光轴中心检测系统与精密电控旋转台控制面板就像传统仪器的实际面板一样,可以完成所需的计算、控制等任务。使用虚拟仪器技术开发出的应用系统体积小,结构简单,成本低,灵活性好,可移植性强,易于与计算机协同工作。
LabV I E W编程简单直观,具有众多源码级的设备驱动程序和丰富实用的分析表达功能,使开发者能快速地构建出自己的测量仪器系统。
参考文献:
[1]安海忠,苏美开,高稚允,等.激光测距机光轴误差的自动测试
与校正[J].激光杂志,2003.24(1):54—55.
[2]田村秀行.计算机图像处理[M].北京:科学出版社。2003.117—
169.
[3]孔兵,王昭,谭玉山.基于圆拟合的激光光斑中一t l,检测算法[J].
红外与激光工程.2002.31(3):275—279.
(上接第421页)
参考文献:
[1]J am e s D F V.Spect r a l change s pr oduced i n Y oun g’s exper i m ent
[J].O pt C o m m un,1991,81:150~154.
[2]K andpa l H C,V ai shya J S,C haod er M.et a1.S pe ct r al changes due
t O s ourc e c or re l at ion i n Y oung’s i n t e rf e re nce exp er i m e nt[J].Ph ys
I et t,1992,A167:114~119.
[3]Ja m e s D F V,W ol f E.SO ITI e nevl,a spec t s of Y oun g’s i nt erf erence
exper i m ent[J].Phys Let t,1991,A157:6~10.
[4]K andr)al H C,V ai sh ya J S,C h aode r M,e t a1.Fi el d oor re l at ion
f r om spe ct r a l m e asu r em ent i n Y oung’S i nt erf erence exper i m ent[J J.
P h ys L et t.1992.A167:120~122.
[5]Ponom ar enko S A,W off E.C o her enc e proper t i es of l i ght i n
424
Y oun g’s i n t e rf e re nce pat t e rn f or m ed w i t h part i al l y eoher朗t l i ght [J].O pt C or nm un.1999,170:l~8.
[6]JJor ge G ar ei a—Suce r gui a,R om an C as t an eda.FuI l r et ri e v i n g of t he
com pl ex degr ee of spa t i a l coh er ence:t heor et i cal anal ys i s[J J.O pt
C o m m,2003。228:9~19.
[7]Sant a r si er o M,G or i F,Spect r al change s i n Y oun g’s i nt erf erence
panem[J J.Phys L e n,1992,A167:123~128.
[8]M ar k G or khl er,J os eph R os en.Gener al con f i gur at i on for us ing t he
l o ngit ud i ual spa t i a l coher ence ef f eet[J].Phys L_et t,2005,252:22~28.
[9]Sh i r al T.A.s aku r a T.Spat i al coher ence O f l i ght generat ed f r om a
s pat i al l y eoher ent,s our ce and i t s con t r ol us ing as our ce f il ter[J].op—t ik.1993,94:l~5.
[10]B om M,W ol f E.Pri nci pl es of opt i cs(2nd edi t i on)[M].Per ga—
m on Pr es s,O xf or d.1964.