微动工作台的分类和组成
1.2 微动工作台的类型及主要组成
微动工作台根据其工作原理和驱动方式的不同可分为以下几种。
1.2.1 扭轮摩擦传动式微位移平台
扭轮摩擦传动式微位移机构是利用扭轮摩擦传动机构实现微位移
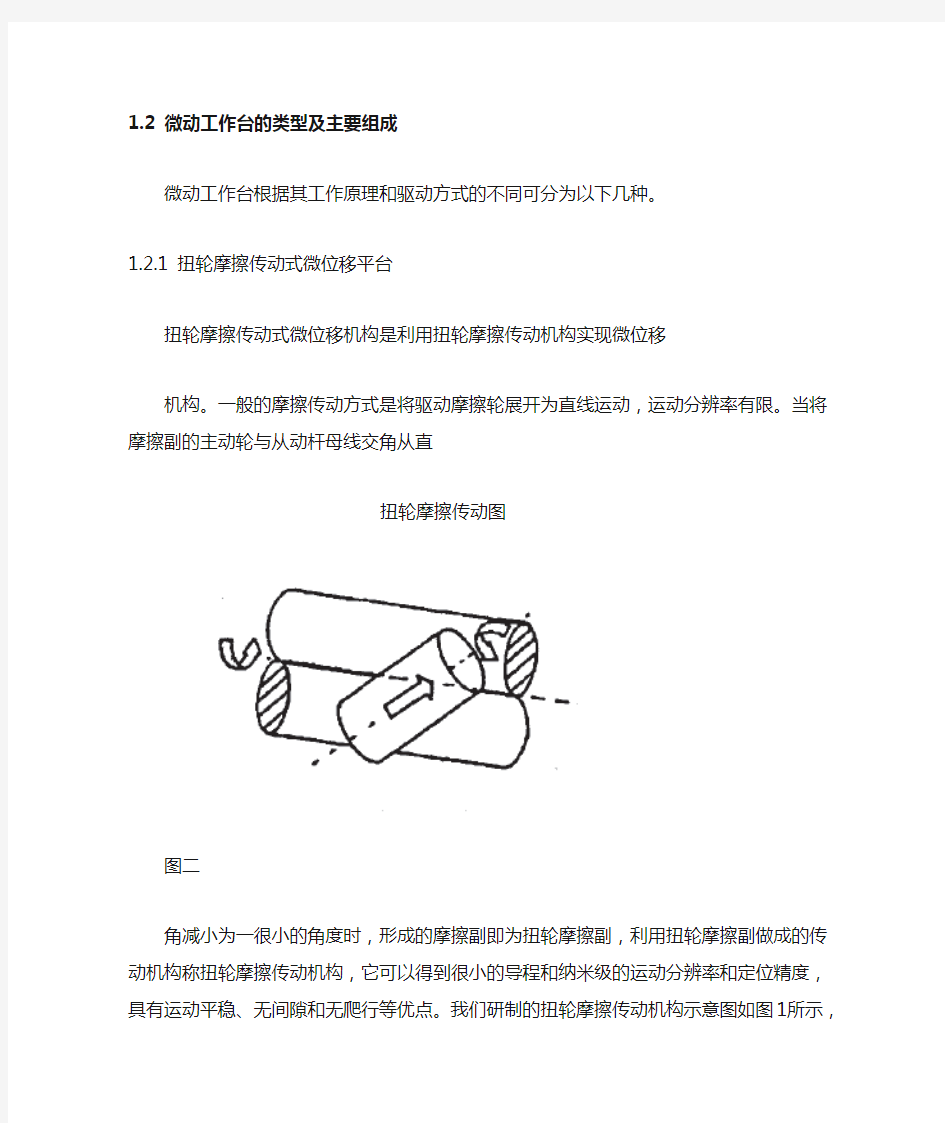
机构。一般的摩擦传动方式是将驱动摩擦轮展开为直线运动,运动分辨率有限。当将摩擦副的主动轮与从动杆母线交角从直
扭轮摩擦传动图
图二
角减小为一很小的角度时,形成的摩擦副即为扭轮摩擦副,利用扭轮摩擦副做成的传动机构称扭轮摩擦传动机构,它可以得到很小的导程和纳米级的运动分辨率和定位精度,具有运动平稳、无间隙和无爬行等优点。我们研制的扭轮摩擦传动机构示意图如图1所示,其导程小于0.2mm,若选用高运动分辨率的电机,则可达在250mm范围内得到纳米级的运动分辨率和
定位精度。它可应用于许多超精密传动领域。
1.2.2 机械传动式微位移平台
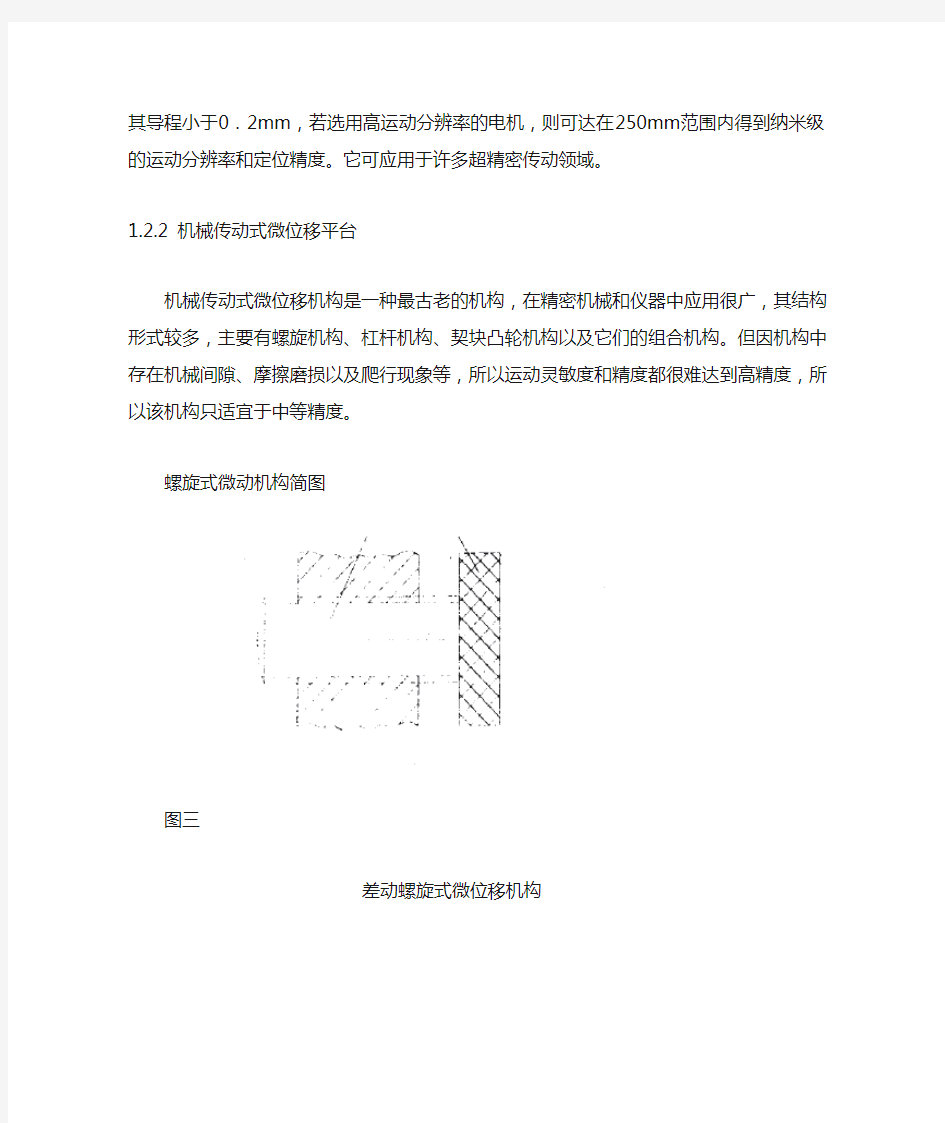
机械传动式微位移机构是一种最古老的机构,在精密机械和仪器中应用很广,其结构形式较多,主要有螺旋机构、杠杆机构、契块凸轮机构以及它们的组合机构。但因机构中存在机械间隙、摩擦磨损以及爬行现象等,所以运动灵敏度和精度都很难达到高精度,所以该机构只适宜于中等精度。
螺旋式微动机构简图
图三
差动螺旋式微位移机构
图四
1.2.3 螺旋式微位移平台
螺旋式微位移机构的结构简图如图2所示,其结构简单、制造维修方便,它是利用螺旋传动原理米获得微小直线位移,转动手轮l转动经螺杆2将螺旋运动转换为直线运动。运动件的直线位移J与手轮转角中关系为:J=±—}·≯因此,若螺杆螺距f已定,在螺杆与螺母配研和传动平稳时,控制妒的大小即可得到微位移,其精度可达l 0 u m。它广泛应用于微调和测量机构,如千分尺等。为了得到更高精度的微位移,就采用如图3所示的差动螺旋式微位移机构。它的螺杆l有两段螺距分别为,2和f,的螺纹,f2大于,。且螺旋方向相同,则螺母2的微位移(即输出位移)s为:
s=(f2一f1)/(2)
式中西为手轮转角,若屯和f】分别为0.75mm和0.7mm,其差值为O.05mm,手轮的圆周刻度分划为50格,则手轮转动1格时,在螺杆与螺母配研和传动平稳以及零件达到加工精度时,运动件的位移量为1 u m。差动螺旋式微位移机构除此之外还有采用差动螺母的形式,其工作原理类似,结构相对紧凑,但相对而言,其加工精度稍难保证,因差动螺母较难保证加工精度。
1.2.4 组合式机械传动式微位移平台
凸轮式微位移机构是利用凸轮曲线的微小变化来实现运动件的微位移,其传动链短、刚性好。螺旋一斜面微位移机构是利用螺旋微位移机构推动一斜块运动以使斜块在某一方向产生微位移。蜗轮一凸轮式微位移机构,其原理是:主动杆蜗轮转动,经蜗轮蜗杆副减速,带
动凸轮转动,再通过滚轮使运动件产生微位移。齿轮一杠杆式微位移机构是利用手轮轴的转动,经过几级齿轮减速,变成扇形齿轮的微小转动,再通过杠杆机构将其微小转动转化为运动件的直线微位移。此外,还有齿轮一摩擦式微位移机构和螺旋一锥轮式微位移机构等等。但组合式微位移机构相对复杂些,一般应用于特定场合。
1.2.5 热变形式微位移平台
热变形式微位移机构的微动原理是:如下图4所示,传动杆l的一端固定在机架上,另一端固定在沿导轨作微位移的零部件2上,当线圈通电加热时,使传动杆受热伸长,其伸长量为:
△£=a£(t1一t0)=a£△t
式中a——传动杆材料的线膨胀系数;
£传动杆的长度:t1、t0——分别为被加热达到的温度和加热前的温度。改变通入电流或者电压的值
电热式微位移机构原理图
图五
使传动杆温度改变。即可得到不同的微位移量d热变形式微位移机构结构、操作控制方便,与大降速比的机械传动式微位移机构相比,它的刚度高且无间隙。但因传动杆与周围介质之间有热交换,因而影响位移精度且由于热惯性的存在以及对传动杆的冷却速度难以准确调节。因此限制了微位移的速度,故不适宜于行程较长、频率较高的微位移。
1.2.6 弹性变形传动式微位移平台
弹性变形传动式微位移机构的结构示意图及其动力学模型如图5所示,其原理是利用两个串联在一起的主动弹簧的刚度差,实现输出位移相对于输入位移的大幅度缩小,以提高输出位移的分辨率。设主动弹簧和从动弹簧的刚度分别为K1、k2,且K2远大于L1,主动弹簧的位移(即输入位移)和从动弹簧的位移(即输出位移)分别为△X1、△X2,则:
)/(*21112k k k x x +?=?
弹性变形式微位移机构如下图
图六 弹性变形式微位移机构动力学模型如下图
图七 如果主动弹簧由千分尺驱动,其精度为10um ,K2=9K1,理想情况下其输出精度微1um ,如果K2与K1相差更大,则分辨率、精度更高。该机构传动链短、摩擦力小、易获得精确
位移,且其精度高、稳定性好,可用于扫描隧道显微技术(STM),及需达到原子级分辨率的高精度测量技术和光学零件的精密调整机构。但当该机构的运动件受到为例或存在摩擦力时,这将直接影响精度,而且对于步进状态态的输入位移,容易产生过渡性震荡,所以不适宜于动态响应的情况。
1.2.7 磁致伸缩式微位移平台
磁致伸缩式微位移机构的工作原理如图6所示,磁致伸缩棒1的一端固定在机座上,另一端与运动件相连,绕在伸缩棒外的线圈通电激磁后,在磁场的作用下,伸缩棒产生变形而使运动件实现微量位移,改变磁场强度可得到不同的微位移量,其精度可达亚微米。该机构具有结构简单紧凑、重复精度高、无间隙、刚性好、转动惯量小、工作稳定性好等优点。但其磁场强度与磁致伸缩量之间不严格成线性关系,磁场作用下还伴有发热,故微动精度不高。它适用于精确位移调整、切削刀具的磨损补偿、温度变形补偿及自动调节系统等。
磁致伸缩式微位移机构如下图
图八磁致伸缩式微位移机构
1.2.8压电陶瓷式微位移平台
该机构利用压电陶瓷的逆压电效应来实现微位移,改变输入电压的大小即可得到不同的微位移,它从而避免了机械结构造成的误差,所以具有结构简单、尺寸小、分辨率极高(可达纳米级)、发热少、无杂散电磁场和便于遥控等优点。它已成功勇于高科技领域,如机器人微位移定位器、磁头、喷墨打印、扬声器和光跟踪系统以及压电式刀具补偿机构
等等。
1.2.9 柔性铰链式微位移平台
柔性铰链式微位移机构是今年来发展起来的一种新型的微位移机构。种新型的微位移机构。它是利用压电或电致伸缩器件或螺旋测微仪驱动,然后通过杠杆机构将驱动位移缩小,以实现微小位移。如图7为螺旋测微仪驱动的柔性铰链式微位移机构,是用于微调超精密电容传感器测头与被测对象的初始间距,如果螺旋测微仪的输入位移为Ⅸ,则运动件的输出位移咒为:X0=Mx1=(1+L1/L0)(1+L3/L2)Xi式中m为杠杆机构缩小倍数,可通过改变L0、L1、L2、和L3来调节m,以得到不同的分辨率。
该类机构结构紧凑、体积很小、无机械摩擦、无间隙、无爬行、机械谐振频率高、抗振动干扰能力强、具有较高的位移分辨率(可达1纳米)。若使用压电或电致伸缩件驱动,不仅控制简单,而且可以很容易实现亚微米甚至纳米级的精度,同时不产生噪音和发热,可适宜于各种介质环境工作,是精密机械中理想的微位移机构。已在航空、宇航、微电子:[业部门、精密测量和微调以及生物一r程领域获得重要的应用
柔性铰链式微位移平台简图
图九
1.2.10 直线电机式微位移平台
该微位移机构直接利用直线电机作为驱动件产生微位移的机构。直线电机具有任意的调节行程,无限的位移分辨率,所产生的力小于1000N。采用该机构作为进给驱动系统,快速进给速度可达76m/min,进给加速度可达9.8m/S2以上。直线电机式微位移机构不需要用机械辅助方法将旋转运动转化为直线运动,因此简化了系统的结构,从而避免了由于中间环节的弹性变形、间隙、磨损和发热等因素带来的运动误差。其最明显的优点是响应快,可达到瞬时的高加速度和减速度。它已在异型内圆工件的计算机控制精密车削和磨削加工中得到成功应用。但是直线电机的成本较高、发热较严重、组成的控制系统比较复杂且存在隔磁和防磁问题,所以其应用还不很广泛。不过随着科技的发展,直线电机的这些问题得到解决,直线电机式微位移机构将得到越来越广泛的应用。
1.2.11 其它微位移平移台
此外,还有形状记忆合金(SMA)式、电致伸缩式和滚珠导轨式微位移机构等。SMA微位移机构是利用在低温相态无论它怎样变形,只要加热到一定温度就会马上恢复到原来在高温下的形状的特点来实现微位移。于是通过电流控制SMA的温度即可实现微位移。它已广泛应用于机械化、电气、医疗以及高精度控制等领域。电致伸缩式微位移机构是利用电致伸缩材料在电场作用下发生变形以实现微位移。该机构具有施加电压低、滞后小、位移量度大、重复性好以及无老化等优点,它已广泛应用丁计量设备、微机械手、超精密加工中的误差测量和补偿。滚珠导轨式微位移机构的结构简单、运动灵活、工艺性好、行程大、易实现较高定位精度,可用于微动台和定位装置等。
微位移机构种类很多,它们各有自己的优缺点和主要应用范围。随着微电子技术、宇航、材料、生物工程等学科的发展,它的研究越来越受国内外的重视,且得到了迅速发展和广泛应用,但因机械加工精度、机构的复杂性、相关参数的控制精度、电磁屏蔽等目前技术水平的制约,它的应用还受到一定的限制。不过随着相关科学的不断发展和微位移机构的深入研究,人类将研究出结构简单、高分辨率、高精度、高性能以及调试简便的微位移机构以服务于人类社会。
二维精密数控工作台设计
目录 1.序论 (1) 1.1设计的目的 (1) 1.2设计的意义 (1) 1.3设计的任务 (1) 2.总体方案设计 (2) 2.1二维数控精密工作台的原理 (2) 2.2设计的整体方案 (3) 2.2.1工作台总体结构的确定 (3) 2.2.2传动方案的确定 (3) 2.2.2.1丝杆螺母副的选用 (3) 2.2.2.2导轨副的选用 (4) 2.2.2.3联轴器的选用 (4) 2.2.2.4伺服电动机的选用 (4) 2.3绘制总体方案图 (4) 3.机械系统的设计计算 (5) 3.1滚珠丝杆选择 (5) 3.1.1滚珠丝杆工作长度计算 (5) 3.1.2计算载荷 (6) 3.2.3额定动载荷计算 (7) 3.1.4稳定性校核 (8) 3.1.5滚珠丝杆副的刚度计算 (9) 3.2滚动直线导轨选择 (9) 3.2.1导轨额定寿命计算 (10) 3.2.2导轨工作载荷计算 (11) 3.3联轴器的选择 (11) 3.3.1联轴器传递功率确定 (12) 3.3.2联轴器的选定 (12) 3.4轴承选择 (13) 3.5步进电机的计算与选型 (14) 3.6系统整体性能计算 (15) 3.6.1步进电机轴上总当量负载转动惯量计算 (15) 3.6.2系统刚度计算 (16) 3.6.3系统固有频率计算 (16) 3.6.4系统死区误差计算 (17) 3.6.5由系统刚度变化引起的定位误差计算 (17) 4工作台整体装配图及零件图 (20) 5总结 (20) 6参考文献
1.序论 1.1设计的目的 “精密机械设计基础”课程设计作为实践环节对于整个课程具有非常重要的意义。在这次课程设计中不仅仅是完成一项指定的任务,更重要的是实际走过一个完整的设计过程。学生在课程设计中定位为设计者,对方案进行筛选论证,考虑结构工艺性和选材。整个设计采用AutoCAD和Solidworks完成,从3D建模到2D 图纸。要求学生至少做出一张可用于加工的图纸,图纸的尺寸标注要合理,要有尺寸公差和行为公差,要正确选择材料,要有技术要求。总之,通过本次课程设计使学生知道,设计过程包括哪些步骤,能够投放生产的加工图纸是什么样子的。其目的是: (1)具体应用、巩固加深和扩大课程及有关先修课程的理论知识、生产知识,了解精密机械设计的一般设计方法和步骤,培养学生的实际设计能力,为以后进行毕业设计打下基础。 (2)掌握正确的设计思想,并通过本次课程设计使同学们掌握仪表的设计思想。 1.2设计的意义 精密机械课程设计是一次比较完整的精密机械设计,它是理论联系实际、培养初步设计能力的重要教学环节。对于学生能力的培养具有重大意义。 1.3设计的任务 设计一个数控X-Y工作台,该工作台可用于铣床上坐标的加工和塑料、铝合金零件的二维曲线加工。其实际结构如下图1.3所示:
机械格栅说明书
机械格栅 一、机械格栅用途: GSHZ型回转式格栅除污机(又称“固液分离器”),广泛应用于城市污水处理厂、自来水厂、泵站、电厂进水口,自动拦截并清除水中的漂浮物,保证下道工序的正常运行;也可用作纺织、印染、屠宰、制革、造纸、制糖、酿酒、食品加工中的固液分离。 二、机械格栅型号表示方法: 三、机械格栅主要特点: 该设备的最大优点是自动化程度高、分离效率高、动力消耗小、无噪音、耐腐蚀性能好,在无人看管的情况下可保证连续稳定工作,全过水断面清污。 每2米一道齿耙,齿耙线速度6米/分钟,清污效率高。栅体过梁支撑于混凝土基础之上,使清污机整机运行平稳,工作可靠。 齿耙插入栅条一定深度,把附着在栅条上的污物带到清污机顶部,完成翻转卸污动作,保持过水断面清洁无污物。 牵引链条一般为全不锈钢材质保证水下工作无锈蚀,免维护。 设置了过载安全保护装置,在设备发生故障时,会产生声光报警并自动停机,可以避免设备超负荷工作。 本设备可以根据用户需要任意调节设备运行间隔,实现周期性运转;可以根据格栅前后液位差自动控制;并且有手动控制功能,以方便检修。用户可根据不同的工作需要任意选用。由于该设备结构设计合理,在设备工作时,自身具有很强的自净能力,不会发生堵塞现象,所以日常维修工作量很少。 四、机械格栅结构及工作原理: 机械格栅主要由拦污栅体,回转齿耙,驱动传动机机构,过载保护机构和不锈钢牵引链条等。该设备是由ABS工程塑料、尼龙或不锈钢制成的特殊形耙齿,按一定的排列次序装在耙齿轴上形成封闭式耙齿链,其下部装在进水渠水中。当传动系统带动链轮作匀速定向旋转时,整个耙齿链便自上而下运动,并携带固体杂物从液体中分离出来,流体通过耙齿间隙流出去,
高精度摆动式回转工作台的设计论文
高精度摆动式回转工作台的设计 The design of high-precision Swing rotary table 作者姓名:龚英 专业:机械设计制造及其自动化 学号:成125315 指导教师:元生、宋宏潮 完成日期: 2014.11.30
电机学院继续教育学院
摘要 随着球形零件在机械行业中应用的比例越来越大,由此对加工球面的回转工作台的要求也越来越多,越来越严格。采用球面磨床能精密磨削加工球面体零件,其回转工作台是金属切削加工中用于精密定位的装置,操作人员能够在保持精度的情况下加工零件。有一些回转工作台允许使用分度装置的分度操作,也有些可以根据加工情况,采用回转工作台上的分度头来分度。但是整体来说,普通回转工作台精度不高,适用围小,一般只能加工二维面,如加工圆柱面、腰形孔。 本次设计的高精度摆动式工作台是一种精密机械,可以将工件定位其上(T型槽一般被用于工作台上)。不同于普通工作台,高精度摆动式工作台主要用于三维面的加工,它主要是为加工超硬球面而设计的,解决了普通回转工作台精度不高,适用围小的缺点,能够加工出高精度、超硬度的球面。高精度摆动式回转工作台可以自由旋转及摆动,高精度回转工作台的转动是由蜗轮驱动的,蜗杆蜗轮不仅用于传动还用于分度。它的进给、分度转位都是由给定的指令进行控制的。工作台的摆动是由减速器带动的齿轮传递到摇臂而摇臂带动工作台的摆动。 关键词:蜗杆蜗轮;摆动机构;球面加工
The design of high-precision Swing rotary table Abstract As the proportion of spherical parts in the machinery industry applications is growing, thereby spherical rotary table processing requirements have become more and more and more stringent. Using spherical grinder can precision grinding spherical body parts, which rotary table is a device used for metal cutting precision positioning, the operator can be processed while maintaining the accuracy of parts. Some allow the use of indexing rotary table indexing device operation, but some can be processed according to the situation, the use of indexing the rotary indexing head workbench. But overall, the general is not high precision rotary table, a small scope, generally only processing two-dimensional surface, such as machining cylindrical surface, kidney-shaped holes. The design of high-precision Swing rotary table is a precision machine table,the workpiece can be positioned on (T-slot table is generally used). Unlike ordinary table, the table is mainly used for high-precision machining swinging three-dimensional surface, it is primarily designed for the processing of super-hard sphere, the solution to a common high precision rotary table, the small scope of the shortcomings can be processed high-precision, ultra-hard sphere. High-precision rotary table can swing freely rotate and swing, turn-precision rotary table is driven by a worm gear, worm gear is also used not only for indexing. It feed indexing bits are transferred by a given control instruction. Swing table is delivered by a gear reducer drive to drive the swing arm and rocker table. Key Words:Worm;Swing Mechanism;Spherical processing
CUBIC精密定位工作台CT系列
CUBIC 精密定位平台CT系列 产品型号:精密定位平台型号表示法 一、例如:CT22020C-R500 (1)CT系列工作平台分为120;220系列; (2)20:滚珠丝杠导程分为5mm、10mm;20mm和40mm; (3)C:普通级平台,C7级丝杆、C级导轨组装; (4)R500:平台有效行程; 注:可根据客户需求选配各品牌联轴器、感应器及伺服马达。 以上为公司标准库存产品与IKO的LH、TX同样长度完全互换 CT120系列标配400W伺服马达,导程为5、10、16、20; CT220系列标配750W伺服马达,导程分为5、10、16、20、25、32、40、50;所有导程价格相同; CT系列产品介绍: CUBIC精密定位工作台CT系列是由高刚性振动衰减性好的高强度铝合金滑动台和底座构成的高精度、高刚性定位工作台。 工作台内部和进给机构装有5年或20000公里免维护的精密直线导轨和滚珠丝杠,既保持了原来的性能又实现了长期免维护。 实现了稳定的高行走精度、定位精度和大搭载质量,该结构承受力矩及复合负荷较强。并可选择滑动台的长度。此外, 还可选择滚珠丝杠的种类、导程、电机的种类、传感器的安装等各种规格,可根据用途组合成最优定位工作台。 由全闭环控制实现了极高精度的定位工作台。最适合于以前无法使用滚动导向、需要高精度定位的用途。 CT系列工作台尺寸从120mm到420mm的超大型尺寸,共有有四种尺寸,CT120/CT220铝合金材质; CT320/CT420材质为球墨铸铁;由它们搭配成的双轴规格的滑动台也已系列化。 一、产品特长: 1、结构简单轻量紧凑 在高强度铝合金滑台和底座上装入双列抗力矩宽幅强的直线导轨,高刚性,高精度,体积小,重量轻,安装使用简便。 2、客制化工作台零部件 用户可根据用途指定电机种类、滚珠丝杠种类、导程、带制动功能电机等,选择定位工作台的构成部件。 3、安装简洁方便 系统结构简洁,能节省空间和降低设备成本。安装于底座时,无需拆开防护盖板,底座与滑动台的安装孔尺寸相同,易于多轴系统构成。 4、多轴台式系列化 多轴台式已系列化,能作为高功能多轴机械手使用。CT系列列精密定位工作台备有AC伺服电机和步电机;可根据用途自由选择。
精密回转工作台设计
精密回转工作台设计 目录 前言 (1) 第一章:精密回转工作台的原理与应用 (3) 1.1 精密回转工作的原理 (3) 1.2 设计准则 (4) 1.3 主要技术参数 (4) 1.4 本章小结 (4) 第二章:精密回转工作台的结构设计 (5) 2.1 传动方案的确定 (5) 2.2齿轮传动的设计 (6) 2.3 蜗杆与蜗轮的主要参数与几何尺寸 (9) 2.4 直流伺服电动机的选择及运动参数的计算 (11) 2.5 轴承的选用 (12) 2.6 加紧机构的计算 (13) 2.7 本章小结 (14) 第三章控制系统硬件设计 (16) 3.1 CPU板 (16) 3.2 驱动系统 (17) 3.3 传感器和人机界面 (17) 3.4 本章小结 (17) 第四章控制系统软件设计 (18) 4.1 总体方案 (18) 4.2 键盘扫描的程序 (18) 4.3 数码管显示程序 (19) 4.4 智能化新一代PCNC精密系统 (19) 第五章精密技术发展趋势 (20) 5.1 性能发展方向 (20) 5.2 功能发展方向 (20)
5.3 体系结构的发展 (21) 5.4 智能化新一代PCNC精密系统 (21) 第六章总结 (22) 参考文献 (22)
前言 这次毕业设计主要是培养学生综合应用所学专业的基础理论、基本技能和专业知识的能力,培养学生建立正确的设计思想,掌握工程设计的一般程序、规范和方法。通过机电一体化毕业设计设计,可树立正确的生产观点、经济观点和全局观点,实现由学生向工程技术人员的过渡。 使学生进一步巩固和加深对所学的知识,使之系统化、综合化。 培养学生独立工作、独立思考和综合运用所学知识的技能,提高解决本专业范围内的一般工程技术问题的能力,从而扩大、深化所学的专业知识和技能。 培养学生的设计计算、工程绘图、实验研究、数据处理、查阅文献、外文资料的阅读与翻译、计算机应用、文字表达等基本工作实践能力,使学生初步掌握科学研究的基本方法和思路。 使学生学会初步掌握解决工程技术问题的正确指导思想、方法手段,树立做事严谨、严肃认真、一丝不苟、实事求是、刻苦钻研、勇于探索、具有创新意识和团结协作的工作作风。 本次毕业设计设计主要是解决精密回转工作台的工作原理和机械机构的设计与计算部分,设计思路是先原理后结构,先整体后局部。 目前精密回转工作台已广泛应用于精密机床和加工中心上,它的总的发展趋势是: 1.在规格上将向两头延伸,即开发小型和大型转台; 2.在性能上将研制以钢为材料的蜗轮,大幅度提高工作台转速和转台的承载能力; 3.在形式上继续研制两轴联动和多轴并联回转的精密转台。 精密转台的市场分析:随着我国制造业的发展,加工中心将会越来越多地被要求配备第四轴或第五轴,以扩大加工范围。估计近几年要求配备精密转台的加工中心将会达到每年600台左右。 预计未来5年,虽然某些行业由于产能过剩、受到宏观调控的影响而继续保持着较低的行业景气度外,部分装备制造业将有望保持较高的增长率,特别是那些国家产业政策鼓励振兴和发展的装备子行业。作为装备制造业的母机,普通加工机床将获得年均15%-20%左右的稳定增长。
机械格栅机的分类
机械格栅机的分类 预处理也称初步处理,通常是指在污水处理厂或给水处理厂的进口处,通过一些专用处理设备或构筑物对污水进行简单的处理,去除水中所含有的会影响后续设备正常运行的大块状杂质及长纤维,如漂浮物、砂粒、果壳、纤维物,所涉及的技术包括格栅、筛网、沉砂等。对于水质和水量变化较大的工业废水,在处理之前还需要进行水量和水质的均和调节。 生活污水、工业废水、河流湖泊中常含有一些大块的固体悬浮物和漂浮物,如塑料瓶、塑料袋、破布、棉纱、木棍、树枝、水草等。格栅的基本结构石油一组平行的金属栅条按一定的间距制成的框架,斜放在废水流经的渠道或泵站集水池的进口处,以截留水中较大的悬浮物和漂浮物,防止水泵、管道以及处理设备的堵塞。 格栅的分类: 根据格栅的栅距(栅条之间的净距),可以把格栅细分为粗格栅、中格栅、细格栅三类。一般采用粗细格栅结合使用。 粗格栅 粗格栅的栅距(栅条之间的净距)范围为40~150mm,常采用100mm。栅条结构采用金属直栅条,垂直排列,一般不设清渣机械,必要时人工清渣,主要用于隔除粗大的漂浮物。 此类格栅主要用于地表水取水构筑物、城市排水合流制管道的提升泵房、大型污水处理设备厂等,隔除水中粗大漂浮物,如树干等。在此类格栅后一般需要设置栅距较小的格栅,进一步拦截杂物。 中格栅 在污水处理中,有时格栅也被作为粗格栅,其栅距范围为10~40mm,常用栅距为16~25mm,用于城市污水处理和工业废水处理。除个别小型工业废水处理采用人工清渣外,一般都为机械清渣。 在早期的设计中,格栅的栅距以不堵塞水泵叶轮为选择依据,较大的水泵可以选用较大的格栅,近年来,城市污水处理厂设计中均采用较小的栅距,以尽可能多的去除漂浮杂物。 细格栅
数控回转工作台的设计
引言 对数控回转工作台的设计主要是培养学生综合应用所学专业的基础理论、基本技能和专业知识的能力,培养学生建立正确的设计思想,掌握工程设计的一般程序、规范和方法。而工科类学生更应侧重于从生产的第一线获得生产实际知识和技能,获得工程技术经用性岗位的基本训练,通过毕业设计,可树立正确的生产观点、经济观点和全局观点,实现由学生向工程技术人员的过渡。 使学生进一步巩固和加深对所学的知识,使之系统化、综合化。 培养学生独立工作、独立思考和综合运用所学知识的能力,提高解决本专业范围内的一般工程技术问题的能力,从而扩大、深化所学的专业知识和技能。 培养学生的设计计算、工程绘图、实验研究、数据处理、查阅文献、外文资料的阅读与翻译、计算机应用、文字表达等基本工作实践能力,使学生初步掌握科学研究的基本方法和思路。 使学生学会初步掌握解决工程技术问题的正确指导思想、方法手段,树立做事严谨、严肃认真、一丝不苟、实事求是、刻苦钻研、勇于探索、具有创新意识和团结协作的工作作风。 本次毕业设计主要是解决数控回转工作台的工作原理和机械机构的设计与计算部分,设计思路是先原理后结构,先整体后局部。 目前数控回转工作台已广泛应用于数控机床和加工中心上,它的总的发展趋势是: 1.在规格上将向两头延伸,即开发小型和大型转台; 2.在性能上将研制以钢为材料的蜗轮,大幅度提高工作台转速和转台的承载能力; 3.在形式上继续研制两轴联动和多轴并联回转的数控转台。 数控转台的市场分析:随着我国制造业的发展,加工中心将会越来越多地被要求配备第四轴或第五轴,以扩大加工范围。估计近几年要求配备数控转台的加工中心将会达到每年600台左右。 预计未来5年,虽然某些行业由于产能过剩、受到宏观调控的影响而继续保持着较低的行业景气度外,部分装备制造业将有望保持较高的增长率,特别是那些国家产业政策鼓励振兴和发展的装备子行业。作为装备制造业的母机,普通加工机床将获得年均15%-20%左右的稳定增长。
精密工作台光栅定位测量系统方案
课程设计说明书 设计题目:精密工作台的光栅定位测量系 统设计
目录 第一章.国内外现状概述 (3) 第二章.总体方案设计 (7) 第三章.测量方法设计 (10) 第四章.控制方法设计 (11) 第五章.总结 (16) 第六章.参考文献 (17)
第一章.国内外现状概述 随着数控技术在机床制造领域的普及,现代机床在加工速度,加工精度和可靠性方面都有了巨大的进步。作为数控机床核心技术之一的光栅测量技术对保障现代机床的各项性能指标起着决定性的作用。清楚了解现代光栅测量技术的发展趋势,正确选择适合自身需求的光栅测量系统对机床设计师和机床用户有着重要的意义。 全闭环控制逐渐成为标准,由精密丝杠和编码器构成的半闭环控制系统对于机床热变形导致的加工误差无法进行补偿。在过去的十余年中,采用数学建模预测变形或通过实时测量温度变化来计算变形等尝试在技术上和经济性上都未能取得令人满意的结果。 采用全闭环控制结构的机床,机床传动部件的热变形处于位置控制环之内,误差自动得到补偿。与半闭环系统不同,全闭环系统的补偿效果几乎不随机床工况,磨损状况及加工程序的不同而发生变化,机床可以长期保持初始加工精度。这对于机床生产厂家和用户来说,都意味着巨大的经济效益。 绝对式光栅正成为趋势,所谓绝对式光栅是相对于增量式光栅而言的,增量式光栅通过对光栅探头扫描过的栅线进行计数来获得相对运动的距离数据。为了获得绝对位置,增量式光栅在开机后须执行过参考点动作。 绝对式光栅以不同宽度,不同间距的栅线将绝对位置数据以编
码形式直接制作到光栅上,光栅开机后立刻可以提供绝对位置信息,无需执行过参考点动作。 通常绝对式光栅在绝对轨之外还同时配备有增量轨,用以进一步提高光栅的精度与分辨率。 当今世界,提高运营效率已成为整个制造行业面临的重大课题,因此,测控技术也随之掀起了不断革新的浪潮。在这种注重经营和技术创新的前提下,对测量仪器行业也提出了更高的要求,即量仪产品必须实现高速、高精度和系统化,而且必须与IT产业的发展相对应,同时应进一步加强质量管理测量技术是现代工业中的一个重要组成部分,它是进行生产活动的依据,它支撑着社会的技术进步,为众多领域的科学探索活动提供实验和观测手段,为人类有序的生产活动提供必需的技术保障。测量技术已经成为工业生产设备、安全装置、社会技术保障体系、大型高速交通运载工具、医疗系统和国防工程的核心技术。作为精密机械与精密仪器的关键技术之一的微位移技术,近年来随着微电子术、宇航、生物工程等学科的发展而迅速地发展起来。而定位与测量技术的水平几乎左右着位移技术的发展,因此直接影响到微电子技术等高精度工业的发展。 目前,光栅位移测量技术已经相当成熟,但随着现代工业技术的发展,对光栅位移测量的要求也会随之提高。为了满足更高的要求,光栅位移测量技术不但要达到更高的分辨率,还要适应更复杂的工作环境。在长度量检测系统中,光栅测量系统占有明显优势,有着
格栅除污机选择
机械格栅该怎么选择 机械格.是污水处理厂中污水处理的第一道工序一预处理的主要设备,对后道工序有着举足轻重的作用,要给排水工程的水处理构筑物中,其重要性日盖被人们所认识。其主要用途是拦截、清除水中粗大的飘浮物,如杂草、树枝、垃圾、纤维、塑料物等,保护水泵叶轮,同时减轻后续工序的处理负荷。 实践证明,格栅选择的是否合适,直接影响整个水处理实施的运行。例如:取水泵房进水格栅被飘浮物堵塞,以至将格栅挤跨或挤坏,造成停泵断水;也的格栅间隙太大,造成后续处理构筑物运行困难。如某污水处理厂,格栅间隙口144,运行中,污水内的大量杂物,如尼龙条、塑料制品的碎片、树叶等,大量流进沉浪池,造成水泵叶轮经常堵塞。 格栅除污机,格栅的选择主要包括如下几点 1 进水水质、过栅流量、格栅位置。 2 格栅井深度、宽度、过栅流速。 3 安装角度、排渣高度根据进水水质、水深可以确定格栅的材质、种类。根据流量及过栅流速、安装角度可以计算出格栅的宽度。根据格栅使用位置确定栅条间隙。 4.施工安装要点: 4.1主控项目:(1)格栅除污机安装在基础上应牢固。(2)格栅栅条对称中心与导轨的对称中心应符合要求格栅栅条的纵向面与导轨侧面应平行。(3)耙齿与栅条的啮合应无卡阻间隙应不大于0.5mm啮合深度应不小于35mm。(4)栅片运行位置应正确无卡阻、突跳现象。过载装置应动作灵敏可靠。栅片上的垃圾不应有回落渠内现象。(5)其他类型除污机的安装应满足设计要求。 4.2一般项目:(1)格栅除污机应定位准确。安装角度偏差应符合产品随机技术文件规定。各机架的连接应牢固。(2)机身较长的格栅除污机应按要求采取加固措施。(3)格栅除污机两侧与沟渠壁间隙应不大于格栅栅条间隙。(4)格栅除污机安装允许偏差应符合产品规定。 5.技术经济性能分析 市场上的格栅种类繁多价格各异。就小区生活污水处理来说常用的为人工格栅或回转式机械格栅。人工格栅造价很低人工格栅造价基本上在几百至几千元浮
OFD LFMMIMO雷达中旋转目标微多普勒效应分析及三维微动特征提取
第33卷第1期电子与信息学报Vol.33No.1 2011年1月 Journal of Electronics & Information Technology Jan. 2011 OFD-LFM MIMO雷达中旋转目标微多普勒效应分析及三维微动特征提取罗迎*①张群①②封同安①李松③梁贤姣① ①(空军工程大学电讯工程学院西安 710077) ②(复旦大学波散射与遥感信息国家教育部重点实验室上海 200433) ③(空军工程大学导弹学院三原 713800) 摘要:该文将微多普勒效应引入到多输入多输出(MIMO)雷达技术研究,以旋转运动目标为例,分析了雷达辐射正交频分线性调频信号(OFD-LFM)时目标的微多普勒效应,给出了其参数化表达。在此基础上,进一步将微多普勒理论从目前的雷达视线方向上的微动分量提取扩展到微动部件3维运动和结构特征提取,利用MIMO雷达的多视角特性,提出了构建多元非线性方程组求解旋转部件的3维运动参数的算法,实现了目标3维微动特征的提取。 仿真实验验证了算法的有效性和鲁棒性。 关键词:多输入多输出雷达;微多普勒;旋转目标;目标识别 中图分类号:TN958 文献标识码: A 文章编号:1009-5896(2011)01-0008-06 DOI: 10.3724/SP.J.1146.2010.00234 Micro-Doppler Effect Analysis of Rotating Target and Three-dimensional Micro-motion Feature Extraction in OFD-LFM MIMO Radar Luo Ying①Zhang Qun①② Feng Tong-an① Li Song③ Liang Xian-jiao① ①(Telecommunication Engineering Institute, Air Force Engineering University, Xi’an 710077, China) ②(Key Laboratory of Wave Scattering and Remote Sensing Information (Ministry of Education), Fudan University, Shanghai 200433, China) ③(Missile Institute, Air Force Engineering University, Sanyuan 713800, China) Abstract: The micro-Doppler (m-D) effect is introduced for the Multi-Input Multi-Output (MIMO) radar techniques in the paper. Taking rotating target for an example, the m-D effect is analyzed and the parameterized expression is deduced in MIMO radar which transmits OFD-LFM (Orthogonal Frequency Division Linear Frequency Modulation) signals. An algorithm for three-dimensional micro-motion feature extraction is proposed, which extends the m-D signature extraction from the micro-motion projection in Line-Of-Sight (LOS) to the three-dimensional micro-motion feature. By taking advantage of the multi-view of MIMO radar, the three-dimensional micro-motion features are obtained by solving nonlinear multivariable equation systems. Simulation results validate the effectiveness and robustness of the algorithm. Key words:MIMO radar; micro-Doppler (m-D); Rotating target; Target recognition 1引言 自从2004年Fishler等人[1]提出“多输入多输出(MIMO)雷达”概念以来,MIMO雷达引起了相关研究人员的广泛关注[26]?。MIMO雷达在弱目标检测能力、目标运动参数估计精度和目标分辨率等方面较传统雷达有着明显优点[13]?,特别是MIMO雷达具有空间分集优势,可完成对目标散射分布信息的空域并行采样,从而减少时域的脉冲采样数量,实现目标的快速ISAR成像,因此MIMO雷达成像 2010-03-12收到,2010-06-15改回 国家自然科学基金(60971100)资助课题 *通信作者:罗迎 luoying2002521@https://www.360docs.net/doc/368432446.html, 技术近年来开始得到深入研究[46]?。 但由于受到现有技术的限制,目前直接利用ISAR像进行目标识别较为困难。近几年来,从激光雷达中引入的微多普勒概念为特殊目标的精确识别提供了新的技术途径[710] ?。微多普勒现象可被视为目标结构部件与主体之间相互作用的结果,它是该目标所具有的独特特征,可为完成对特殊目标的分类、识别、成像提供重要信息[11]。由于MIMO ISAR 具有空间分集优势,因而可以提取目标更多的空间特征以用于目标识别。特别是由于目标微动在不同视角上有着不同的投影分量,各个接收阵元上接收到的微多普勒信号将有着不同的相位变化,利用该变化可望提取目标微动部件的空间3维运动和结构特征,大大提高雷达的目标识别能力。基于这种考
最新500X500方台面数控回转工作台设计汇总
500X500方台面数控回转工作台设计
(500X500)方台面数控回转工作台设计 绪论 毕业设计主要是培养学生综合应用所学专业的基础理论、基本技能和专业知识的能力,培养学生建立正确的设计思想,掌握工程设计的一般程序、规范和方法。而高职类学生更应侧重于从生产的第一线获得生产实际知识和技能,获得工程技术经用性岗位的基本训练,通过毕业设计,可树立正确的生产观点、经济观点和全局观点,实现由学生向工程技术人员的过渡。 使学生进一步巩固和加深对所学的知识,使之系统化、综合化。 培养学生独立工作、独立思考和综合运用所学知识的技能,提高 解决本专业范围内的一般工程技术问题的能力,从而扩大、深化所学的专业知识和技能。 培养学生的设计计算、工程绘图、实验研究、数据处理、查阅文献、外文资料的阅读与翻译、计算机应用、文字表达等基本工作实践能力,使学生初步掌握科学研究的基本方法和思路。 使学生学会初步掌握解决工程技术问题的正确指导思想、方法手段,树立做事严谨、严肃认真、一丝不苟、实事求是、刻苦钻研、勇于探索、具有创新意识和团结协作的工作作风。 本次毕业设计主要是解决数控回转工作台的工作原理和机械机构的设计与计算部分,设计思路是先原理后结构,先整体后局部。
目前数控回转工作台已广泛应用于数控机床和加工中心上,它的总的发展趋势是: 1.在规格上将向两头延伸,即开发小型和大型转台; 2.在性能上将研制以钢为材料的蜗轮,大幅度提高工作台转速和转台的承载能力; 3.在形式上继续研制两轴联动和多轴并联回转的数控转台。 数控转台的市场分析:随着我国制造业的发展,加工中心将会越来越多地被要求配备第四轴或第五轴,以扩大加工范围。估计近几年要求配备数控转台的加工中心将会达到每年600台左右。 预计未来5年,虽然某些行业由于产能过剩、受到宏观调控的影响而继续保持着较低的行业景气度外,部分装备制造业将有望保持较高的增长率,特别是那些国家产业政策鼓励振兴和发展的装备子行业。作为装备制造业的母机,普通加工机床将获得年均15%-20%左右的稳定增长。 第一章数控回转工作台的原理与应用
二维精密工作台设计
精密机械与仪器设计 课程设计说明书 二维数控精密工作台 设计题目:二维数控工作台精密工作台 班级:测控08-3班 姓名:徐斌 指导教师:闫勇刚
摘要 数控机床是一种高度自动化的机床,随着社会生产和科学技术的迅速发展,机械产品的性能和质量不断提高,改型频繁。机械加工中,多品种、小批量加工约占80%。这样,对机床不仅要求具有高的精度和生产效率,而且还要具备“柔性”,即灵活通用,能迅速适应加工零件的变更。数控机床较好地解决了形状复杂、精密、小批、多变的零件加工问题,具有适应性强、加工精度高、工质量稳定和生产效率高等优点,是一种灵活而高效的自动化机床。二维数控精密工作台采用滚珠丝杠和直线导轨副传动,具有精度高,效率高,寿命长,磨损小,节能降耗,结构紧凑,通用性较强.工作台材料一般为HT400,也可以根据用户要求,设计加工,铝合金,钢板,大理石均可以加工;数控工作台系列产品可以配置步进电机或伺服电机.数控精密工作台可广泛应用于激光焊接机,激光切割机,插线机,打孔机,涂胶机,机械手,搬运或运输生产线上,检测装置,射线探伤分析,应力分析等数控机床和实验设备上。随着电子、自动化、计算机和精密测试等技术的发展,数控机床在机械制造业中的地位将更加重要,二维数控工作台是设备实现高精密加工的核心部件,对于提高产品的加工质量起着尤为重要作用。 关键字:数控工作台步进电机控制滚珠导轨丝杠
目录 绪论 (4) 课程设计的设计要求 (4) 本课题设计的背景 (5) 本课题设计内容 (5) 1.1. 本课题设计的目的和意义 (5) 1.2. 总体方案 (6) 机械系统设计 (8) 2.1工作台外形尺寸及重量估算 (8) 滚动导轨的参数确定 (9) 滚珠丝杠的设计计算 (12) 步进电机的选用 (17) 联轴器的选用 (21) 步进电机惯性负载的计算 (22) 二维数控精密工作台的误差来源与分析 (26) 丝杠误差分析与补偿: (26) 结论 (27) 致谢 (29) 参考文献: (30)
格栅设计与选型
环科0801 陈得者200806660101 格栅设计与选型 格栅的工艺参数: 过栅流速:v=0.6~1.0m/s 栅前水深:h=0.4m 安装角度:a=45~75° 格栅间隙b:一般15~30mm,最大为40 mm 栅条宽度bs:细格栅3~10mm 中格栅10~40mm 粗格栅50~100mm 进水渠宽:B1=0.65m 渐宽部分展开角度a1=20° 栅前渠道超高h2=0.3m 由于流量非常大,为防止垃圾堵塞格栅,达到去除粗大物质、保护处理厂的机械设备的目的,故选用一粗一细两个格栅。 主要设计参数: 粗格栅
1. 栅条的间隙数n 取栅前水深h=0.4m 过栅流速v=0.7m/s 间隙宽度b=0.04m 安装角度a=60° Q=50000m 3/d= 0.579 m 3/s=579L/s 总变化系数根据流量Q=579L/s ,查下表内插得K z =1.38 Q max =1.38Q=1.38×0.579m 3/s=0.799 m 3/s n=Q max ×sina b ×h ×v =0.799×sin60° 0.04×0.4×0.7 =66.4 取n=67 2.栅槽宽度B 取栅条宽b s =0.02m B=b s (n-1)+b ×n=0.02×(67-1)+0.04×67=4m 3.进水渠道至栅槽渐宽部分长l 1 进水渠宽B 1=0.65m 渐宽部分展开角度a 1=20° l 1=B-B 12tga 1 =4-0.652tg20° =4.60m 4.栅槽至出水渠道间渐缩部分长l 2 l 2=l 12 =2.30m 5.通过格栅的水头损失h 1 选用锐边矩形栅条断面
有机物的分类
有机化合物: 狭义上的有机化合物主要是指由碳元素、氢元素组成,一定是含碳的化合物,但是不包括碳的氧化物和硫化物、碳酸、碳酸盐、氰化物、硫氰化物、氰酸盐、碳化物、碳硼烷、羰基金属、不含M-C键的金属有机配体配合物,部分金属有机化合物等主要在无机化学中研究的含碳物质。 定义: “有机物”原意是来自生物体的物质,因为早期发现的有机物都是从生物体内分离出来的。随着有机合成的发展,许多有机物在实验室可由无机物合成得到。“有机物”这一词已失去了原来的含义。 《IUPAC有机化学命名原则》则规定:“基于命名目的,将至少含有一个碳原子,同时不包含任何来自1-12族的元素(氢除外),且可以用本书提到的原则命名的结构视为有机物。” 有机物是生命产生的物质基础。无机化合物很多为不含碳元素的化合物;但某些含碳元素的化合物,如二氧化碳、碳硼烷等,属于无机化学的研究领域,因此这类物质也属于无机物。 有机化合物除含碳元素外,还可能含有氢、氧、氮、氯、磷和硫等元素。而碳元素在无机化学中也具有几乎不可替代的作用,其中金属羰基原子簇更是占据了当今无机化学的半壁江山。因此,有机化合物都是含碳化合物,但是含碳化合物不一定是有机化合物。 最简单的有机化合物是甲烷(CH4),在自然界的分布很广,是天然气,沼气,煤矿坑道气等的主要成分,俗称瓦斯,也是含碳量最
小(含氢量最大)的烃。它可用来作为燃料及制造氢气(H2)、炭黑(C)、一氧化碳(CO)、乙炔(C2H2)、氢氰酸(HCN)及甲醛(HCHO)等物质的原料。 特点: 除含碳元素外,绝大多数有机化合物分子中含有氢元素,有些还含氧、氮、卤素、硫和磷等元素。已知的有机化合物近8000万种。早期,有机化合物系指由动植物有机体内取得的物质。自1828年维勒人工合成尿素后,有机物和无机物之间的界线随之消失,但由于历史和习惯的原因,“有机”这个名词仍沿用。有机化合物对人类具有重要意义,地球上所有的生命形式,主要是由有机物组成的。有机物对人类的生命、生活、生产有极重要的意义。地球上所有的生命体中都含有大量有机物。 与无机物相比较,有机物的主要特点是:①大多为共价型化合物,固态是分子晶体,有较低的熔点(一般在300℃以下) 、沸点,极性较小,属于非电解质。② 大多易燃,受热易分解。③ 多数难溶于水,易溶于乙醇、乙醚、丙酮、苯、汽油等有机溶剂。④ 有机物的反应多为分子反应,反应速度较慢,常需要加热、光照或催化剂。⑤ 有机反应的副反应多,产率较低,产物往往是混合物。⑥ 普遍存在同分异构现象。
本科毕业设计---高精度摆动式回转工作台的设计
上海电机学院继续教育学院毕业设计(论文) 高精度摆动式回转工作台的设计The design of high-precision Swing rotary table 作者姓名:龚英 专业:机械设计制造及其自动化 学号:成125315 指导教师:张元生、宋宏潮 完成日期:2014.11.30 上海电机学院继续教育学院
上海电机学院继续教育学院毕业设计(论文) 摘要 随着球形零件在机械行业中应用的比例越来越大,由此对加工球面的回转工作台的要求也越来越多,越来越严格。采用球面磨床能精密磨削加工球面体零件,其回转工作台是金属切削加工中用于精密定位的装置,操作人员能够在保持精度的情况下加工零件。有一些回转工作台允许使用分度装置的分度操作,也有些可以根据加工情况,采用回转工作台上的分度头来分度。但是整体来说,普通回转工作台精度不高,适用范围小,一般只能加工二维面,如加工圆柱面、腰形孔。 本次设计的高精度摆动式工作台是一种精密机械,可以将工件定位其上(T型槽一般被用于工作台上)。不同于普通工作台,高精度摆动式工作台主要用于三维面的加工,它主要是为加工超硬球面而设计的,解决了普通回转工作台精度不高,适用范围小的缺点,能够加工出高精度、超硬度的球面。高精度摆动式回转工作台可以自由旋转及摆动,高精度回转工作台的转动是由蜗轮驱动的,蜗杆蜗轮不仅用于传动还用于分度。它的进给、分度转位都是由给定的指令进行控制的。工作台的摆动是由减速器带动的齿轮传递到摇臂而摇臂带动工作台的摆动。 关键词:蜗杆蜗轮;摆动机构;球面加工
高精度摆动式回转工作台的设计 The design of high-precision Swing rotary table Abstract As the proportion of spherical parts in the machinery industry applications is growing, thereby spherical rotary table processing requirements have become more and more and more stringent. Using spherical grinder can precision grinding spherical body parts, which rotary table is a device used for metal cutting precision positioning, the operator can be processed while maintaining the accuracy of parts. Some allow the use of indexing rotary table indexing device operation, but some can be processed according to the situation, the use of indexing the rotary indexing head workbench. But overall, the general is not high precision rotary table, a small scope, generally only processing two-dimensional surface, such as machining cylindrical surface, kidney-shaped holes. The design of high-precision Swing rotary table is a precision machine table,the workpiece can be positioned on (T-slot table is generally used). Unlike ordinary table, the table is mainly used for high-precision machining swinging three-dimensional surface, it is primarily designed for the processing of super-hard sphere, the solution to a common high precision rotary table, the small scope of the shortcomings can be processed high-precision, ultra-hard sphere. High-precision rotary table can swing freely rotate and swing, turn-precision rotary table is driven by a worm gear, worm gear is also used not only for indexing. It feed indexing bits are transferred by a given control instruction. Swing table is delivered by a gear reducer drive to drive the swing arm and rocker table. Key Words:Worm;Swing Mechanism;Spherical processing - II -