基于混合逻辑动态模型的三相逆变电路有限控制集模型预测控制策略

第38卷第2期电网技术V ol. 38 No. 2 2014年2月Power System Technology Feb. 2014 文章编号:1000-3673(2014)02-0375-06 中图分类号:TM 721 文献标志码:A 学科代码:470·4051
基于混合逻辑动态模型的三相逆变电路
有限控制集模型预测控制策略
李宁,李颖晖,韩建定,朱喜华
(空军工程大学航空航天工程学院,陕西省西安市710038)
FCS-MPC Strategy for Inverters Based on MLD Model
LI Ning, LI Yinghui, HAN Jianding, ZHU Xihua
(Aeronautics and Astronautics Engineering Institute, Air Force Engineering University, Xi’an 710038, Shaanxi Province, China)
ABSTRACT: Since the conventional switch function model of inverters can only describe the controlled transition, while ignore the conditional transition of inverters, this study builds a mixed logical dynamical (MLD) model for inverters and treats it as a predictive model to work out a finite control set model predictive control (FCS-MPC) strategy for inverters. The FCS-MPC strategy takes full account of the discreteness of inverters, and selects the switch state that minimizes the objective function as the control signal for inverters to control the output voltage, which simplifies the optimization of MPC without any modulators. In addition, a load current observer is designed based on the full state observer, which enhances the robust of the controller. The simulation and test results validate the proposed method.
KEY WORDS:inverter; mixed logical dynamical model; model predictive control; observer; finite control set model predictive control
摘要:逆变电路传统开关函数模型只能描述电路的控制变迁而忽略了电路的条件变迁,为此,建立了三相逆变电路混合逻辑动态(mixed logical dynamical,MLD)模型。在此基础上,将其作为预测模型,提出了电路的有限控制集模型预测控制(finite control set model predictive control,FCS-MPC)策略。FCS-MPC充分考虑了电路的离散特性,选择有限控制集中使目标函数值最小的开关状态作为电路开关管的控制信号,从而控制电路的输出电压,无需任何调制器,可简化MPC 的优化问题。此外,基于全维状态观测器设计了电路负载电流观测器,增强了控制器的鲁棒性。仿真和实验结果验证了所提方法的有效性。
关键词:逆变电路;混合逻辑动态模型;模型预测控制;状态观测器;有限控制集模型预测控制
DOI:10.13335/j.1000-3673.pst.2014.02.016
基金项目:国家自然科学基金项目(61074007);陕西省自然科学基金资助项目(2012JM8016)。
Project Supported by National Natural Science Foundation of China (61074007). 0 引言
带输出LC滤波器的逆变电路被广泛应用于分布式发电、储能系统及不间断电源,这些系统对电路输出电压及总谐波含量具有较高要求[1-3],电路准确的数学模型是实现精确控制的关键。由于逆变电路是一种典型的混杂系统[4-5],而混合逻辑动态(mixed logical dynamical,MLD)建模作为混杂系统建模方法中的一种,是将系统整个当作一个微分方程组来处理,离散事件以条件的方式嵌入微分方程组中,兼顾了电路的控制变迁和条件变迁,因而可以用MLD建模来建立逆变电路精确的数学模型,并将其用于电路的控制。
近年来,MPC由于具有快速的动态响应特性而被大量用于电力电子电路的控制。文献[6]建立了单相逆变电路的一种混杂模型,并基于此模型研究了电路的MPC,有效降低了输出电压的总谐波含量。文献[7-8]研究了DC-DC变换器基于MLD模型的MPC,降低了混合整数二次规划(mixed integer quadratic programming,MIQP)问题的求解难度。文献[9-10]在建立对象混杂模型的基础上研究了三相电机驱动系统MPC,提出了一种求解MIQP问题的改进方法。MPC能够充分考虑系统的约束条件和非线性因素,并且可以通过改变目标函数的形式、范数、权数和变量个数来达到控制要求[11]。但为了提高控制精度,将MLD模型作为MPC的预测模型将面临MIQP的求解问题,目前已有大量文献[12-14]对MIQP 的求解算法进行了研究。而对于电力电子电路,由于开关频率较大,要求系统具有很小的采样周期,要在极短的采样周期内求解MIQP问题具有很大的困难,这是电力电子电路基于MLD模型设计在线MPC所面临的最大障碍。
376 李宁等:基于混合逻辑动态模型的三相逆变电路有限控制集模型预测控制策略 V ol. 38 No. 2
本文以带输出LC 滤波器的三相逆变电路为例,研究了基于MLD 模型的FCS-MPC 策略,在每个采样时刻,通过预测下一时刻输出电压值,选择使目标函数值最小的开关状态作为电路输入,无需任何控制环和调制器,避免了求解MIQP 问题。
1 电路的数学模型
1.1 MLD 预测模型
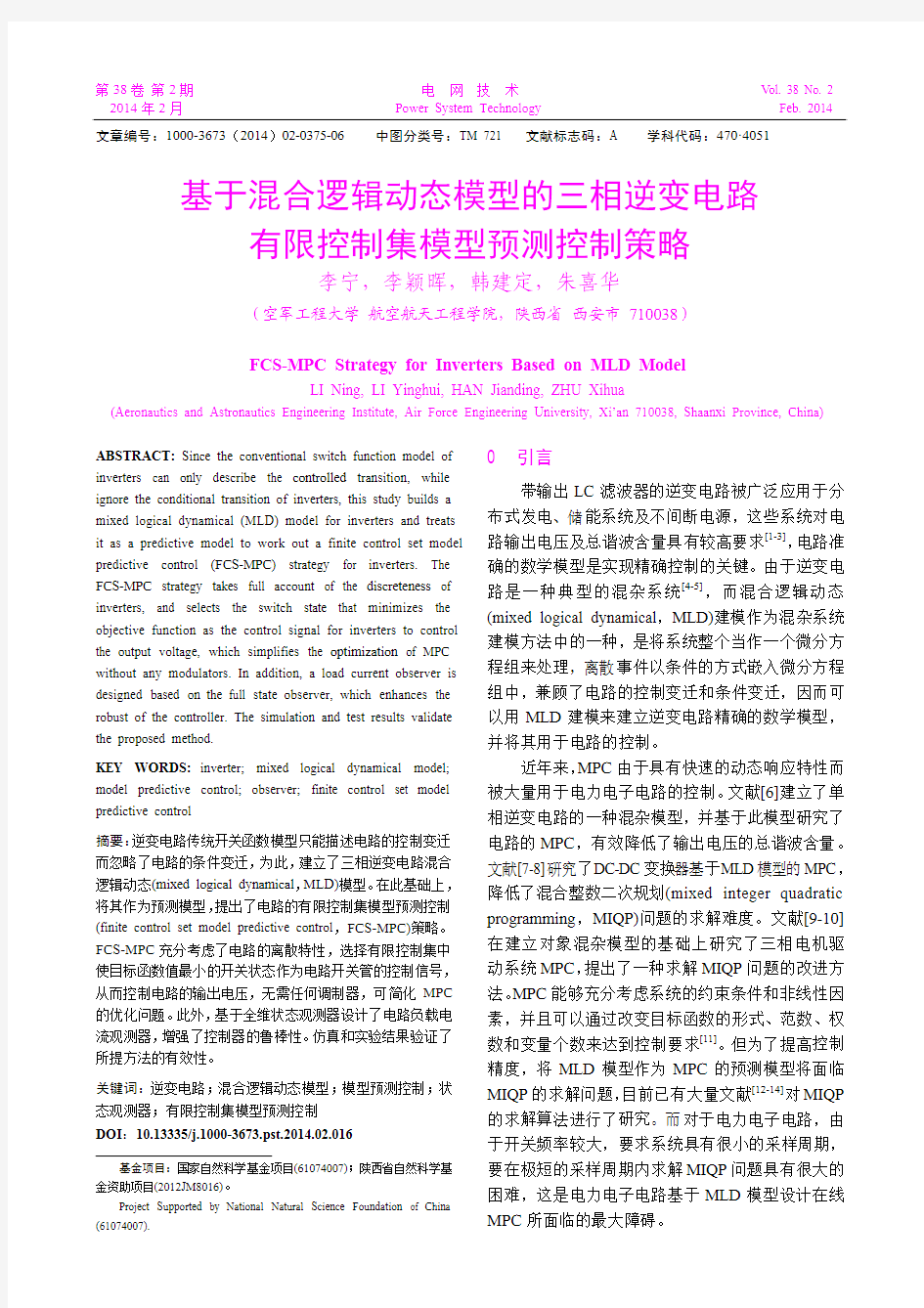
图1为本文所要研究的带输出LC 滤波器的三相逆变电路拓扑结构,设定电路开关管S a1~S a6的控制信号为s 1~s 6(控制信号为1时表示开关管导通,0表示关断)。图1中:U dc 为直流电源电压;L 为滤波电感;i f 为电感电流;C 为滤波电容;i c 为电容电流;i 0为输出电流。
图1 电路拓扑结构
Fig. 1 Inverter topological structure
引入逻辑运算符,“ú表示析取”、“ù表示合取”、“-表示取非”、“?表示等价”
[15]
,以电路a
臂(b 、c 两臂类似)为例,定义电流i a 流入滤波电感的方向为正,将离散事件i a >0和i a <0分别用逻辑变量s a =1和s a =0表示,有
a a a
a [1][0]
[0][0]i i s s =?>ì?í
=?
14a 14a 14a a01
4a 14a 14a a0dc [0,1,1][0,0,1] [0,1,0][0]
[1,0,1][0,0,0] [1,0,0][]s s s s s s u s s s s s s u V s s s s s s ===ú===úì?
===?=?í
===ú===ú??===?=?
(2) 式中u a0为电路a 点与0点位点0之间的电压。 由上述逻辑关系得电压u a0的数学描述为
a0dc 411a ()u U s s s s =+ (3)
式中上标-表示对逻辑变量取非。
同理可以得到电压u b0、u c0的数学描述,结合式(3)表示为
a0dc 411a b0dc 633b c0
dc 255c ()()()
u U s s s u U s s s u U s s s s s s =+ì?
=+í?=+? (4) 考虑到电压u a0、u b0、u c0与u an 、u bn 、u cn (u an 、
u bn 、u cn 分别表示电路a 、b 、c 三点与电路中性点n 点之间的电压)存在如下关系:
an a0n0bn b0n0cn
c0n0u u u u u u u u u
=-ì?
=-í?=-? (5) u n0表示电路中性点n 与零电位点0之间的电压。
n0a0b0c0(1/3)()u u u u =++ (6)
结合式(5)(6)可得
an a0b0c0bn a0b0c0cn a0b0c0(1/3)(2)
(1/3)(2)(1/3)(2)
u u u u u u u u u u u u =--ì?
=-+-í?
=--+? (7) 将式(7)转换为空间向量形式,得
2n an bn cn (2/3)()u u u u a a =++ (8)
式中()j 2/3=e a p 。
同理,利用向量概念,将电路三相的电感电流i af 、i bf 、i cf ,电容电压u ac 、u bc 、u cc ,输出电流i a0、
i b0、i c0分别表示为空间向量的形式,即
2f af bf cf 2
c ac bc cc 20
a0b0c0(2/3)()(2/3)()(2/3)()
i i i i u u u u i i i i a a a a a a ì=++?=++í?=++? (9) 从而,将电路的电感动态特性以向量形式表示为
f
n c d (1/)()d i L u u t
=- (10) 电容动态特性的向量表达式为
c
f 0d (1/)()d u C i i t
=- (11) 结合式(10)(11),可得电路的MLD 模型的向量表达式为
1n 20u i =++ìí
=?
&x
Ax B B y Cx (12) 式中:f c i u éù=êú??x ;1010L C éù-êú
=êúêúêú??
A ;110L éùêú=êú??
B ;
201C éù
êú=êú-êú??
B ;[01]=
C 。
将式(12)离散化可得到电路的MLD 预测模型
*1n 20(1)()()()
()()k k u k i k k k **
ì+=++?í
=??
x A x B B y Cx (13) 式中:A *、B 1*、B 2*表示系统离散化后的系数矩阵,
s *e T =A A ,s
110
e d T t t *=òA B B ,s
220
e d T t t *
=òA B B ;T s
为采样周期。
第38卷 第2期 电 网 技 术 377
1.2 参考输出的预测模型
根据预测控制的基本原理,为使系统实际输出能够准确、快速地跟踪参考输出,系统k +1时刻的参考输出与预测输出误差就要尽可能地趋近于0,其中预测输出由式(13)得到,而k +1时刻的参考输出主要由以下2种方法求解[16]:
1)利用线性拉格朗日外推公式,得到系统k +1时刻的参考输出。
c c c (1)3(1)2(2)u k u k u k ***+=--- (14)
2)二阶拉格朗日外推法,本文将此方法作为参考输出的预测模型。
c c c c (1)3()3(1)(2)u k u k u k u k ****
+=--+- (15)
2 负载电流观测器的设计
为利用式(13)预测电路的输出,还需要知道电路的输出电流i 0,但i 0通常不便于测量,一种简单的方法是通过测量滤波电流和输出电压来估计输出电流,即
0f s C C (1)(1)(/)(()(1))i k i k C T U k U k -=----(16) 式中U C (k )为k 时刻电容电压。
但利用(16)式进行估计,估计结果对测量噪声特别敏感,因为它是基于输出电压的导数,因此文章设计了一种全维状态观测器用于估计输出电流i 0。
21n
000000[0]u i i i ìéùéùéùéù=+?êúêúêúêú?êúêúêúê
ú?????????í
éù?
=êú
?êú????
&&x x A B B x y C (17) 设计全维状态观测器估计系统的状态向量[x i 0]T ,则
21n 000?d ?d ?()??000d d ??0?t u J i i t i ìéù?êúéùéùéù?êú=++-êúêúêú?êú???????
íêú??
?
?éù=?êú????
[]x
x A B B y y x
y C (18) 式中:J 为观测器系数;上标^表示估计值。 将式(18)整理得
n obs 100?d ?d [0]???d d u t J i i t éùêúéùéù
=+êúêúêúêú????
êú??x x A B x (19)
式中2obs 00J éù
=-êú??
A B A C 。 观测器输出为输出电流的估计值,即
00??[001]?i i éù=êú??
x (20)
由此可见,通过测量滤波电流i f ,输出电压u c
以及中性点电压u n ,由式(19)(20)即可得到输出电
流i o 的估计值0?i
。 3 有限控制集模型预测控制策略
3.1 目标函数的选取
将MPC 用于逆变电路的控制,其重要优势是:能够充分考虑控制过程中电路的约束条件、非线性特性,将电路期望的控制参数(如电路输出电压、输出电流或开关频率等)以目标函数的形式表示,通过优化目标函数达到控制目标[17-18]。
由于逆变电路只有8种不同的电压矢量,文章利用这一特征设计了电路在线有限控制集模型预测控制(finite control set model predictive control ,FCS-MPC)策略。为选出最优的电压矢量作为电路的控制,分别计算8种矢量的u c (k +1),并比较目标函数值,选择使目标函数值最小的矢量作为电路的控制。
本文以控制输出电压为例,选择目标函数为
22cαcαcβcβ()()g u u u u **=-+- (21)
式中:cαu *、cβu *
为参考输出电压的实部和虚部;u cα、
u cβ为预测电压的实部和虚部。 3.2 控制策略的系统结构
图2为FCS-MPC 策略框图,应用电路是图1所示的带输出LC 滤波器的三相逆变电路拓扑。其中,S a 、S b 、S c 分别为逆变电路a 、b 、c 三臂的控制信号,其与功率管S a1~S a6的控制信号s 1~s 6之间的关系为
1a 4a
3b 6b 5
c 2c ,,,s S s S s S s S s S s S
ì==?
==í?==? (22) 图2控制框图实现的重要功能如下:1)参考
图2 FCS-MPC 策略框图 Fig. 2 Block diagram of FCS-MPC
378 李宁等:基于混合逻辑动态模型的三相逆变电路有限控制集模型预测控制策略V ol. 38 No. 2
输出预测模块由式(15)预测k+1时刻电路的参考输出电压,并将其送入目标函数模块。2)负载电流估计模块根据式(18)(19)输出负载电流估计值。3)预测模块由式(13)预测k+1时刻电路的输出电压。4)目标函数模块根据k+1时刻电路的参考输出电压和预测输出电压值,选择使式(20)最小的开关模式用于电路的控制。
3.3 控制流程
控制流程如图3所示。首先采集k时刻电路的参数,包括输出电压u c、滤波电流i f、中性点电压u n及参考输出电压u c*(k),并对负载电流进行估计;给目标函数g赋予一个初始值g初始,j=0,1,2, (7)
表电路的8种开关矢量,比较不同开关矢量的目标函数值,其中g(j)为第j个开关矢量所对应的目标函数值,选取最小目标数值对应的开关矢量S最优作为电路下一刻的输入,从而使电路输出电压的总谐波含量满足要求。
图3控制流程
Fig. 3 Flow chart of control
4 仿真与实验验证
利用图1所示逆变电路拓扑,基于Matlab/ Simulink对文章所提方法进行验证,仿真参数如下:U dc=270 V,滤波电感L=2 mH,滤波电容C=40 m F,采样周期为T s=10 m s,额定频率为400 Hz。
建立电路传统开关函数模型,并将其作为预测模型代替图2中的预测模块,按照图2中的FCS-MPC框图进行仿真,其结果如图4,其中R= 200 W,a相总谐波畸变率T HD=1.65%。图5为以MLD模型代替开关函数模型,将电路MLD模型作
-200
-100
100
200
t/s
输
出
电
压
/
V
图4基于开关函数模型的FCS-MPC的电路输出电压
Fig. 4 Inverter output voltage of FCS-MPC based on
switch function model
-200
-100
100
200
t/s
输
出
电
压
/
V
图5 基于MLD模型的FCS-MPC的电路输出电压
Fig. 5 Inverter output voltage of FCS-MPC based on
MLD model
为预测模型的控制结果,a相T HD=0.54%。由图4、5可见,MLD模型能够提高控制精度。将输出电压的参考值设为200 V,其控制结果如图6所示,a 相T HD=0.82%;可见,FCS-MPC策略能够较好地控制电路输出不同幅值的电压,从而满足不同场合的需要,因而该控制方法具有良好的通用性。当电路为阻感负载时,其中R=200 W,L=2.7 mH,控制效果如图7所示,a相T HD=0.59%;可见,FCS-MPC 策略在非线性负载条件下性能良好,从而证明了该控制策略具有实际应用价值。
-300
-100
100
300
t/s
输
出
电
压
/
V
图6输出电压参考值为200 V的控制效果
Fig. 6 Control results when the output voltage
reference value is 200 V
负载电流观测器的估计值与电路实际值的相量图如图8所示,其中,i a、i b纵坐标分别表示电路负载电流矢量的实部和虚部。可见,稳态时观测器能够很好地跟踪电路实际值。
电路从空载到满载的暂态特性如图9所示,0.002 s将200 W的电阻接入电路,从结果可以看
第38卷 第2期 电 网 技 术 379
-200
t /s
输出电压/V
-1000100200
图7 阻感负载的控制效果
Fig. 7 Control results with resistance and inductance load
-2
-1
0 1
2
--i b
i a
估计值
实际值
图8 负载电流观测器的估计值与实际值比较 Fig. 8 Comparison of estimated value of observer and
practical value
0.004 -250
-150-5050t /s 输出电压/V
0.010
0.002 0.006 0.008 150
图9 电路从空载到满载时的输出电压
Fig. 9 Output voltage of inverter from no-load to full-load 出,输出电压基本不受到负载变化的影响,满载后输出电压a 相T HD =0.74%。图10为0.005 s 电路负载从200 W 变为100 W 时,负载电流观测器的估计值与电路实际值的相量图,电路负载变化前后,观测器均能够很好地跟踪电路的实际值,具有很好的鲁棒性。
实验控制基于TMS320C6713,三相整流电路作为直流电源,流程如图3所示。滤波电感L =2 mH ,
-4
-4
i b
i a
-2
0 2 4
-2024估计值 实际值
图10 电路从空载到满载时观测器的性能
Fig. 10 Performance of observer from no-load to full-load
滤波电容C =40 m F ,采样周期为T s =10 m s 。实验结果见图11。图11(a)为稳态时输出电压波形,T HD = 2.44%;图11(b)为电路0.005 s 从空载到满载时输出电压的暂态特性,满载后T HD =2.56%;图11(c)为稳态时观测器的跟踪电路实际电流结果;图11(d)为负
载从200 W 变为100 W 时观测器的跟踪结果。
t (1 ms/格) 电压(50 V /格)
(a) 稳态输出电压
t (1 ms/格)
电压(50 V /格)
(b) 输出电压暂态特性
t (1 ms/格)
电流(0.5 A /格)
估 计 值
实际值
(c) 稳态时观测器跟踪结果
t (1 ms/格)
电流(0.5 A /格)
估计值
实际值
(d) 负载突变时观测器结果
图11 实验结果 Fig. 11 Test results
由图8、10、11可以看出,负载电流观测器的估计值与电路电流的实际值之间存在一定的误差;由图2可知,负载电流观测器的估计值作为预测模块的一个输入,其与实际值之间的误差将直接决定预测模块输出的准确性,从而影响控制效果,因而文章将从以下几个方面对其进行分析说明。
1)误差产生的原因:①采样单元的延迟会影响观测器输入的实时性;②电路模型的准确性;③用一个采样周期内状态变量的平均变化率代替其瞬时变化率。
2)误差的解决方法。通过对误差原因的分析,观测器误差虽然无法彻底消除,但可通过以下方法尽量减小:①建立电路准确的数学模型是减低误差的主要办法;②适当增大采样频率,而频率过大会
增加开关损耗,因此折衷的采样频率也可有效降低
估计误差。
3)误差的评估。由图2可知,估计误差直接
380 李宁等:基于混合逻辑动态模型的三相逆变电路有限控制集模型预测控制策略V ol. 38 No. 2
影响预测精度,而预测直接决定控制结果,因而本文采用输出电压总谐波畸变率作为估计误差的评估标准,根据相关标准,输出电压波形的总谐波畸变率不超过5%。
此外,由图5、9、11的结果可以看出,与仿真分析相比,在实验研究中电路输出电压波形的T HD 较大,文章对这一情况的原因及改善措施说明如下。
与仿真相比,实验中输出电压PHD较大的主要原因有:1)干扰。与仿真相比,实验中干扰明显增大,导致状态估计、预测模型的理论参数发生漂移,从而影响控制效果。2)测量。测量仪器本身的误差会给采样单元的输出数据造成较大的误差及延迟;而采样单元的误差经过状态估计模块、预测模块的放大,最后会反映在控制结果中。
改进措施有:1)改进实验设备;2)改善实验环境;3)反复多次调试,优化模型参数。随着实验室条件的不断完善,相信实验结果会得到不断的改进。
5 结论
本文分析建立了三相逆变电路的MLD模型,并将其作为电路的预测模型,为带输出LC滤波器的三相逆变电路研究了一种简单的FCS-MPC策略,使电路的输出电压具有较好的品质,并保证电路无论在线性负载还是非线性负载下均拥有良好的稳态和暂态特性。此外,考虑到负载电流不易于检测,基于全维状态观测器设计了负载电流的全维观测器,具有较强的鲁棒性,仿真和实验验证了控制策略的可行性和有效性。
参考文献
[1] Cortes P,Ortiz G,Y uz J L.Model predictive control of an inverter
with output LC filter for UPS application[J].IEEE Transactions on Industrial Electronics,2009,56(6):1875-1883.
[2] 王恒利,付立军,肖飞,等.三相逆变器不平衡负载条件下双环
控制策略[J].电网技术,2013,37(2):398-404.
Wang HengLi,Fu LiJun,Xiao Fei,et al.A double-loop control strategy for three-phase inverter with unbalanced load[J].Power System Technology,2013,37(2):398-404(in Chinese).
[3] Carrasco J M,Franquelo L G,Bialasiewicz J T.Power-electronic system
for the grid integration of renewable energy sources:a survey[J].IEEE Transactions on Industrial Electronics,2006,53(6):1398-1409.[4] 郑雪生,李春文,戎袁杰.DC/AC变换器的混杂系统建模及预测
控制[J].电工技术学报,2009,24(7):87-92.
Zheng Xuesheng,Li Chunwen,Rong Y uanjie.Hybrid dynamic modeling and model predictive control for DC/AC converter[J].Transactions of China Electrotechical Society,2009,24(7):87-92(in Chinese).
[5] 宋嘉婧,郭创新,张金江,等.山火条件下的架空输电线路停运
概率模型[J].电网技术,2013,37(1):100-105.
Song Jiajing,Guo Chuangxin,Zhang Jinjiang,et al.A probabilistic
model of overhead transmission line outage due to forest fire[J].Power System Technology,2013,37(1):100-105(in Chinese).[6] Almer S,Mariethoz S,Morari M.Sampled data model predictive
control of a voltage source inverter for reduced harmonic distortion [J].IEEE Transactions on Control Systems Technology,2012,20(8):198-209.
[7] Hejri M,Giua A.Hybrid modeling and control of switching DC-DC
converter via MLD systems[C]//IEEE International Conference on Automation Science and Engineering Trieste.Trieste,Italy:IEEE,2011:714-719.
[8] Almer S,Mariethoz S,Morari M.Piecewise affine modeling and
control of a step-up DC-DC converter [C]//2010 American Control Conference Marriott Waterfront.Baltimore,MD,USA:2010 American Control Conference Marriott Waterfront,2010:3299-3304.[9] 周林,张林强,廖波,等.单相光伏逆变器控制技术研究[J].电
网技术,2012,36 (9):25-30.
Zhou Lin,Zhang Linqiang,Liao Bo,et al.Research on control strategy of single-phase photovoltaic inverter[J].Power System Technology,2012,36(9):25-30(in Chinese).
[10] Papafotiou G,Geyer T,Morari M.A hybrid model predictive control
approach to the direct torque control problem of induction motors[J].International Journal of Robust and Nonlinear Control,2007,44(10):1572-1589.
[11] Cortes P,Kazmierkowski M P,Kennel R M.Predictive control in
power electronics and drives[J].IEEE Transactions on Industrial Electronics,2008,55(12):4312-4324.
[12] 刘东冉,陈树勇,马敏,等.光伏发电系统模型综述[J].电网技
术,2011,35 (8):47-52.
Liu Dongran,Chen Shuyong,Ma Min,et al.A review on models for photovoltaic generation system[J].Power System Technology,2011,35(8):47-52(in Chinese).
[13] Axehill D,Morari M.Improved complexity analysis of branch and
bound for hybrid MPC[C]//49th IEEE Conference on Decision and Control.USA:IEEE,2010:4216-4222.
[14] Bemporad A,Giorgetti N.Logic-based solution methods for optimal
control of hybrid system[J].IEEE Transactions on Automatic Control,2006,51(6):963-976.
[15] Sreekumar C,Vivek A.A hybrid control algorithm for voltage
regulation in DC-DC boost converter[J].IEEE Transactions on Industrial Electronics,2008,55(6):2530-2538.
[16] Baek Y,Lee K J,Hyun D S.Improved predictive current control for grid
connected inverter applications with parameter estimation[J].IEEE Transactions on Industrial Electronics,2009,56(6):1-6.
[17] 王宝诚,郭小强,梅强,等.三相并网逆变器脱网运行电压控制
技术[J].电网技术,2011,35(7):91-95.
Wang Baocheng,Guo Xiaoqiang,Mei Qiang,et al.Intentional islanding voltage control for three-phase grid-connected inverters[J].Power System Technology,2011,35(7):91-95(in Chinese).[18] Cortes P,Rodriguez J,Quevedo D E.Predictive current control
strategy with imposed load current spectrum[J].IEEE Trans on Power Electron,2008,23(2):612-618.
收稿日期:2013-08-28。
作者简介:
李宁(1985),男,博士研究生,从事电路拓扑及
控制研究,E-mail:dorisyu423@https://www.360docs.net/doc/376087360.html,;
李颖晖(1966),女,博士生导师,首批空军高层
次科技人才,享受军队高科技人才津贴,从事电力
电子技术及其控制研究。
李宁
(责任编辑徐梅)
基于混合逻辑动态模型的三相逆变电路有限控制集模型预测控制策略
作者:李宁, 李颖晖, 韩建定, 朱喜华, LI Ning, LI Yinghui, HAN Jianding, ZHU Xihua 作者单位:空军工程大学航空航天工程学院,陕西省西安市,710038
刊名:
电网技术
英文刊名:Power System Technology
年,卷(期):2014(2)
本文链接:https://www.360docs.net/doc/376087360.html,/Periodical_dwjs201402016.aspx
逻辑回归模型分析见解
1.逻辑回归模型 1.1逻辑回归模型 考虑具有p个独立变量的向量,设条件概率为根据观测量相对于某事件发生的概率。逻辑回归模型可表示为 (1.1) 上式右侧形式的函数称为称为逻辑函数。下图给出其函数图象形式。 其中。如果含有名义变量,则将其变为dummy变量。一个具有k个取值的名义变量,将变为k-1个dummy变量。这样,有 (1.2) 定义不发生事件的条件概率为 (1.3) 那么,事件发生与事件不发生的概率之比为 (1.4) 这个比值称为事件的发生比(the odds of experiencing an event),简称为odds。因为0
得到的概率。在同样条件下得到的条件概率为。于是,得到一个观测值的概率为 (1.6) 因为各项观测独立,所以它们的联合分布可以表示为各边际分布的乘积。 (1.7) 上式称为n个观测的似然函数。我们的目标是能够求出使这一似然函数的值最大的参数估计。于是,最大似然估计的关键就是求出参数,使上式取得最大值。 对上述函数求对数 (1.8) 上式称为对数似然函数。为了估计能使取得最大的参数的值。 对此函数求导,得到p+1个似然方程。 (1.9) ,j=1,2,..,p. 上式称为似然方程。为了解上述非线性方程,应用牛顿-拉斐森(Newton-Raphson)方法进行迭代求解。 1.3牛顿-拉斐森迭代法 对求二阶偏导数,即Hessian矩阵为 (1.10) 如果写成矩阵形式,以H表示Hessian矩阵,X表示 (1.11) 令
最优控制理论课程总结
《最优控制理论》 课程总结 姓名:肖凯文 班级:自动化1002班 学号:0909100902 任课老师:彭辉
摘要:最优控制理论是现代控制理论的核心,控制理论的发展来源于控制对象的要求。尽50年来,科学技术的迅速发展,对许多被控对象,如宇宙飞船、导弹、卫星、和现代工业设备的生产过程等的性能提出了更高的要求,在许多情况下要求系统的某种性能指标为最优。这就要求人们对控制问题都必须从最优控制的角度去进行研究分析和设计。最优控制理论研究的主要问题是:根据已建立的被控对象的时域数学模型或频域数学模型,选择一个容许的控制律,使得被控对象按预定要求运行,并使某一性能指标达到最优值[1]。 关键字:最优控制理论,现代控制理论,时域数学模型,频域数学模型,控制率Abstract: The Optimal Control Theory is the core of the Modern Control Theory,the development of control theory comes from the requires of the controlled objects.During the 50 years, the rapid development of the scientific technology puts more stricter requires forward to mang controlled objects,such as the spacecraft,the guide missile,the satellite,the productive process of modern industrial facilities,and so on,and requests some performance indexes that will be best in mang cases.To the control problem,it requests people to research ,analyse,and devise from the point of view of the Optimal Control Theory. There are mang major problems of the Optimal Control Theory studying,such as the building the time domain’s model or the frenquency domain’s model according to the controlled objects,controlling a control law with admitting, making the controlled objects to work according to the scheduled requires, and making the performance index to reseach to a best optimal value. Keywords: The Optimal Control Theroy, The Modern Control Theroy, The Time Domaint’s Model, The Frequency domain’s Model,The Control Law
完整版逻辑回归模型分析见解
1.逻辑回归模型 1.1 逻辑回归模型 考虑具有p个独立变量的向量■',设条件概率卩;上二?丨门二广为根据观测 量相对于某事件发生的概率。逻辑回归模型可表示为 :「( 1.1) 上式右侧形式的函数称为称为逻辑函数。下图给出其函数图象形式。 其中-" I' 1 c' ■-..【?。如果含有名义变量,则将其变为dummy 变量。一个具有k个取值的名义变量,将变为k-1个dummy 变量。这样,有 — I ( 1.2) 这个比值称为事件的发生比(the odds of experie ncing an event), 0
得到I 的概率。在同样条件下得到-- 的条件概率为丨:一"。 得到一个观测值的概率为 因为各项观测独立,所以它们的联合分布可以表示为各边际分布的乘积。 (1.7) 上式称为n个观测的似然函数。我们的目标是能够求出使这一似然函数的值最大的参数估 譏备心)( 」' (1.10 是, ◎ )*(1 ¥严(1.6 ) i-l 计。于是,最大似然估计的关键就是求出参数:- ,使上式取得最大值。 对上述函数求对数 — (1.8) 上式称为对数似然函数。为了估计能使亠取得最大的参数的值。 对此函数求导,得到p+1个似然方程。 Ei 片 n:—E L尹—心肿一时 (1.9 ) ^叶切迄尸,j=1,2,..,p. 上式称为似然方程。为了解上述非线性方程,应用牛顿-拉斐森 进行迭代求解。 (Newto n-Raphs on) 方法1.3 牛顿-拉斐森迭代法 对-八?求二阶偏导数,即Hessian矩阵为 如果写成矩阵形式,以H表示Hessian矩阵,X表示 (1.11 )
最优控制课程介绍
最优控制 先修课程:常微分方程,最优化方法最优控制问题是具有特殊数学结构的一类最优化问题,在科学、工程和管理乃至人文领域都存在大量的最优控制问题。最优控制研究动态系统在各种约束条件下,寻求目标泛函取极值的最优控制函数与最优状态轨线的数学理论和方法,它是静态最优化在无穷维空间的扩展。希望学生通过本课程的学习,能够结合实际背景,建立最优控制的模型,理解求解最优控制的三大类基本方法的数学思想,灵活地掌握这些方法的基本过程,并能解释计算结果的意义。主要内容如下:最优控制问题及其建模;数学基础;变分法及其在最优控制的应用;极小值原理及其应用;动态规划方法及其应用;应用。 最优控制 一、课程基本信息 1.先修课程:数学系本科包括到大三的全部课程 2.面向对象:理学院数学系各专业 3.推荐教学参考书:吴沧浦,《最优控制的理论与方法》,国防工业出版社,2000 王朝珠等,《最优控制理论》,科学出版社,2003 邢继祥等,《最优控制应用基础》,科学出版社,2003 W. L. Brogan, Modern C ontrol Theor y, (3th eidition), Prentice-Hall, Englew ood C liffs,1991 二、课程的性质和任务本课程是数学与应用数学专业本科生高年级选修课程之一。从数学的角度,最优控制问题是最优化问题中具有特殊结构的一类问题。就问题的来源看,它又是控制问题。最优控制研究动态系统在各种约束条件下寻求使目标泛函取极值的最优控制函数和最优状态轨线的数学理论和方法。最优控制问题涉及范围广跨度大,几乎理工医农,管理军事乃至人文经法领域,都存在着大量此类问题。最优化已是寻求最优系统和结构,挖掘系统潜力的有力武器,学会求解最优控制问题,是应用数学工作者的最基本素养之一。通过本课程的主要任务是,从各个教学环节引导学生认识不同数学问题的特点和相应数学模型的结构,自己学会分析实际问题,建立各种数量之间的联系,写出正确的合理的最优控制的模型;领会求解最优控制问题解法是如何提出的数学思想,并学会如何根据这些思想来构成相应方法的技巧;学会能正确地解释计算结果的物理意义的能力。最根本的是学会和培养系统地、动态地、综合地考虑,认识和处理问题的思想方法和动手能力。这样,通过本课程的各个教学环节,提高学生的数学素质,加强学生开展科研工作和解决实际问题的能力。三、教学内容和要求基本要求:期望学生能够结合工程背景认识最优控制问题的数学结构的特点,从而能灵活地建立实际问题的数学模型,深刻领会求解它们的三大类方法的数学思想,熟练地掌握这些方法的运用步骤,能正确地解释求解结果的意义,并学会最优控制问题的数值解法。第一章最优控制与最优化问题 1.1 最优化问题的源和流 1.2 最优控制问题的例子和数学描述 1.3 最优控制问题求解的基本思想第二章数学基础 2.1 向量与矩阵的求导法则 2.2 函数极值的几个条件 2.3 线性微分方程的解第三章变分法 3.1 泛函的变分与极值 3.2 Euler方程 3.3 等式约束条件下泛函极值问题的必要条件 3.4 几类可用变分方法求解的最优控制问题 3.5 应用实例第四章极小值原理 4.1 极值曲线场与充分条件 4.2 有控制变量不等式约束的极小值原 理 4.3 含有状态变量不等式的极小值原理 *4.4 极小值原理的证明 4.5 极小值原理的应用实例 4.6 离散极小值原理第五章极小值原理的几类应用 5.1 时间最短最优控制问题 5.2 燃料最省最优控制问题 5.3 线性二次型最优控制问题第六章动态规划 6.1 多阶段决策问题与动态规划思想 6.2 用动态规划思想解最优化问题 6.3 离散系统最优控制问题的动态规划解法 6.4 离散线性二次型问题的动态规划解 6.5 连续系统做优控制问题的动态规划解和HJB方程 6.6 连续二次型问题的动态规划解 6.7 Riccatti方程的求解第七章最优控制的新发展 7.1 对策论和微分对策 7.2 随机最优控制四.实验(上机)内容和基本要求本课程无实验和上机的教学安排,但要求学生结合本专业的特点和所研究的课题,选择部分算法自己上机实现。要求学生熟悉至少一门数学软件平台(Mathematica/ matleb/Maple)和至少一种编程语言。教学实验就是编程解决实际问题。至少做有求解
神经网络模型预测控制器
神经网络模型预测控制器 摘要:本文将神经网络控制器应用于受限非线性系统的优化模型预测控制中,控制规则用一个神经网络函数逼近器来表示,该网络是通过最小化一个与控制相关的代价函数来训练的。本文提出的方法可以用于构造任意结构的控制器,如减速优化控制器和分散控制器。 关键字:模型预测控制、神经网络、非线性控制 1.介绍 由于非线性控制问题的复杂性,通常用逼近方法来获得近似解。在本文中,提出了一种广泛应用的方法即模型预测控制(MPC),这可用于解决在线优化问题,另一种方法是函数逼近器,如人工神经网络,这可用于离线的优化控制规则。 在模型预测控制中,控制信号取决于在每个采样时刻时的想要在线最小化的代价函数,它已经广泛地应用于受限的多变量系统和非线性过程等工业控制中[3,11,22]。MPC方法一个潜在的弱点是优化问题必须能严格地按要求推算,尤其是在非线性系统中。模型预测控制已经广泛地应用于线性MPC问题中[5],但为了减小在线计算时的计算量,该部分的计算为离线。一个非常强大的函数逼近器为神经网络,它能很好地用于表示非线性模型或控制器,如文献[4,13,14]。基于模型跟踪控制的方法已经普遍地应用在神经网络控制,这种方法的一个局限性是它不适合于不稳定地逆系统,基此本文研究了基于优化控制技术的方法。 许多基于神经网络的方法已经提出了应用在优化控制问题方面,该优化控制的目标是最小化一个与控制相关的代价函数。一个方法是用一个神经网络来逼近与优化控制问题相关联的动态程式方程的解[6]。一个更直接地方法是模仿MPC方法,用通过最小化预测代价函数来训练神经网络控制器。为了达到精确的MPC技术,用神经网络来逼近模型预测控制策略,且通过离线计算[1,7.9,19]。用一个交替且更直接的方法即直接最小化代价函数训练网络控制器代替通过训练一个神经网络来逼近一个优化模型预测控制策略。这种方法目前已有许多版本,Parisini[20]和Zoppoli[24]等人研究了随机优化控制问题,其中控制器作为神经网络逼近器的输入输出的一个函数。Seong和Widrow[23]研究了一个初始状态为随机分配的优化控制问题,控制器为反馈状态,用一个神经网络来表示。在以上的研究中,应用了一个随机逼近器算法来训练网络。Al-dajani[2]和Nayeri等人[15]提出了一种相似的方法,即用最速下降法来训练神经网络控制器。 在许多应用中,设计一个控制器都涉及到一个特殊的结构。对于复杂的系统如减速控制器或分散控制系统,都需要许多输入与输出。在模型预测控制中,模型是用于预测系统未来的运动轨迹,优化控制信号是系统模型的系统的函数。因此,模型预测控制不能用于定结构控制问题。不同的是,基于神经网络函数逼近器的控制器可以应用于优化定结构控制问题。 在本文中,主要研究的是应用于非线性优化控制问题的结构受限的MPC类型[20,2,24,23,15]。控制规则用神经网络逼近器表示,最小化一个与控制相关的代价函数来离线训练神经网络。通过将神经网络控制的输入适当特殊化来完成优化低阶控制器的设计,分散和其它定结构神经网络控制器是通过对网络结构加入合适的限制构成的。通过一个数据例子来评价神经网络控制器的性能并与优化模型预测控制器进行比较。 2.问题表述 考虑一个离散非线性控制系统: 其中为控制器的输出,为输入,为状态矢量。控制
SPSS操作方法:逻辑回归
SPSS操作方法之五 SPSS操作方法:逻辑回归 例证8.3: 在一次关于公共交通的社会调查中,一个调查项目是“乘公交车上下班,还是骑自行车上下班”因变量Y=1表示乘车,Y=0表示骑车。自变量X1表示年龄;X2表示表示月收入;X3表示性别,取1时为男性,取0时为女性。调查对象为工薪族群体。数据见下表:试建立Y与自变量之间的Logistic回归。 逻辑回归SPSS操作方法的具体步骤: 1.选择Analyze→Regreessin→Binary Logistic,打开对话框如图1所示:
图1 主对话框Logistic回归。 2.选择因变量Y进入Dependent框内,将自变量选择进入Convariates框。也可以将不同的自变量组放在不同的块(block)中,可以分析不同的自变量组对因变量的贡献。 3.在Mothed框内选择自变量的筛选策略: Enter表示强行进入法;(本例选择) Forword和Bacword都表示逐步筛选策略;Forword 为自变量逐步进入,Bacword是自变量逐步剔出。Conditional ;LR; Wald分别表示不同的检验统计量,如Forword Wald表示自变量进入方程的依据是Wald统计量。 4.在Selection中选择一个变量作为条件变量,只有满足条件的变量数据才能参与回归分析。 5.单击Categorical打开Categorical对话框如图2所示:对定性变量的自变量选择参照类。常用的方法是Indicator,即以某个特定的类为参照类,Last表示以最大值对应的类为参照类(系统默认),First表示以最小值对应的类为参照类。选择后点击Continue按钮返回主对话框。(本例不作选择性) 图2 Categorical对话框 6.单击Option按钮,打开Option对话框如图3所示
最优控制理论的发展与展望
最优控制理论的发展与展 望 Last revision on 21 December 2020
最优控制理论的发展与展望 摘要:回顾最优控制的基本思想、常用方法及其应用,并对其今后的发展方向和面临的困难提出一些看法。 关键词:最优控制:最优化技术;遗传算法;预测控制 Abstract: The basic idea, method and application of optimal control are reviewed, and the direction of its development and possible difficulties are predicted. Keywords: optimal control; optimal Technology;Genetic Algorithm;Predictive Control 1引言 最优控制理论是本世纪60年代迅速发展的现代控制理论中的主要内容之一,它研究和解决如何从一切可能的方案中寻找一个最优的方案。1948年维纳等人发表《控制论一关于动物和机器中控制与通信的科学》论文,引进信息、反馈和控制等概念,为最优控制理论诞生和发展奠定了基础。我国着名学者钱学森在1954年编着的《工程控制论》直接促进了最优控制理论的发展与形成。在最优控制理论的形成和发展过程中,具有开创性的研究成果和开辟求解最优控制问题新途径的工作,主要是美国着名学者贝尔曼的“动态规划”和原苏联着名学者庞特里亚金的“最大值原理”。此外,构成最优控制理论及现代最优化技术理论基础的代表性工作,还有库恩和图克共同推导的关于不等式约束条件下的非线性最优必要条件(库恩一图克定理)及卡尔曼的关于随机控制系统最优滤波器等口 2最优控制理论的几个重要内容 最优控制理论的基本思想 最优控制理论是现代控制理论中的核心内容之一。其主要实质是:在满足一定约束条件下,寻求最优控制规律(或控制策略),使得系统在规定的性能指标(目标函数)下具有最优值,即寻找一个容许的控制规律使动态系统(受控对象、从初始状态转移到某种要求的终端状态,保证所规足的性能指标达到最小(大)值。
模型预测控制
云南大学信息学院学生实验报告 课程名称:现代控制理论 实验题目:预测控制 小组成员:李博(12018000748) 金蒋彪(12018000747) 专业:2018级检测技术与自动化专业
1、实验目的 (3) 2、实验原理 (3) 2.1、预测控制特点 (3) 2.2、预测控制模型 (4) 2.3、在线滚动优化 (5) 2.4、反馈校正 (5) 2.5、预测控制分类 (6) 2.6、动态矩阵控制 (7) 3、MATLAB仿真实现 (9) 3.1、对比预测控制与PID控制效果 (9) 3.2、P的变化对控制效果的影响 (12) 3.3、M的变化对控制效果的影响 (13) 3.4、模型失配与未失配时的控制效果对比 (14) 4、总结 (15) 5、附录 (16) 5.1、预测控制与PID控制对比仿真代码 (16) 5.1.1、预测控制代码 (16) 5.1.2、PID控制代码 (17) 5.2、不同P值对比控制效果代码 (19) 5.3、不同M值对比控制效果代码 (20) 5.4、模型失配与未失配对比代码 (20)
1、实验目的 (1)、通过对预测控制原理的学习,掌握预测控制的知识点。 (2)、通过对动态矩阵控制(DMC)的MATLAB仿真,发现其对直接处理具有纯滞后、大惯性的对象,有良好的跟踪性和较强的鲁棒性,输入已 知的控制模型,通过对参数的选择,来获得较好的控制效果。 (3)、了解matlab编程。 2、实验原理 模型预测控制(Model Predictive Control,MPC)是20世纪70年代提出的一种计算机控制算法,最早应用于工业过程控制领域。预测控制的优点是对数学模型要求不高,能直接处理具有纯滞后的过程,具有良好的跟踪性能和较强的抗干扰能力,对模型误差具有较强的鲁棒性。因此,预测控制目前已在多个行业得以应用,如炼油、石化、造纸、冶金、汽车制造、航空和食品加工等,尤其是在复杂工业过程中得到了广泛的应用。在分类上,模型预测控制(MPC)属于先进过程控制,其基本出发点与传统PID控制不同。传统PID控制,是根据过程当前的和过去的输出测量值与设定值之间的偏差来确定当前的控制输入,以达到所要求的性能指标。而预测控制不但利用当前时刻的和过去时刻的偏差值,而且还利用预测模型来预估过程未来的偏差值,以滚动优化确定当前的最优输入策略。因此,从基本思想看,预测控制优于PID控制。 2.1、预测控制特点 首先,对于复杂的工业对象。由于辨识其最小化模型要花费很大的代价,往往给基于传递函数或状态方程的控制算法带来困难,多变量高维度复杂系统难以建立精确的数学模型工业过程的结构、参数以及环境具有不确定性、时变性、非线性、强耦合,最优控制难以实现。而预测控制所需要的模型只强调其预测功能,不苛求其结构形式,从而为系统建模带来了方便。在许多场合下,只需测定对象的阶跃或脉冲响应,便可直接得到预测模型,而不必进一步导出其传递函数或状
Logistic回归模型
Logistic 回归模型 1 Logistic 回归模型的基本知识 1.1 Logistic 模型简介 主要应用在研究某些现象发生的概率p ,比如股票涨还是跌,公司成功或失败的概率,以及讨论概率 p 与那些因素有关。显然作为概率值,一定有10≤≤p ,因此很难用线性模型描述概率p 与自变量的关 系,另外如果p 接近两个极端值,此时一般方法难以较好地反映p 的微小变化。为此在构建p 与自变量关系的模型时,变换一下思路,不直接研究p ,而是研究p 的一个严格单调函数)(p G ,并要求)(p G 在p 接近两端值时对其微小变化很敏感。于是Logit 变换被提出来: p p p Logit -=1ln )( (1) 其中当p 从10→时,)(p Logit 从+∞→∞-,这个变化范围在模型数据处理上带来很大的方便, 解决了上述面临的难题。另外从函数的变形可得如下等价的公式: X T X T T e e p X p p p Logit βββ+= ?=-=11ln )( (2) 模型(2)的基本要求是,因变量(y )是个二元变量,仅取0或1两个值,而因变量取1的概率 )|1(X y P =就是模型要研究的对象。而T k x x x X ),,,,1(21 =,其中i x 表示影响y 的第i 个因素,它可以 是定性变量也可以是定量变量,T k ),,,(10ββββ =。为此模型(2)可以表述成: k x k x k x k x k k e e p x x p p βββββββββ+++++++=?+++=- 1101 1011011ln (3) 显然p y E =)(,故上述模型表明) (1) (ln y E y E -是k x x x ,,,21 的线性函数。此时我们称满足上面条件 的回归方程为Logistic 线性回归。 Logistic 线性回归的主要问题是不能用普通的回归方式来分析模型,一方面离散变量的误差形式服从伯努利分布而非正态分布,即没有正态性假设前提;二是二值变量方差不是常数,有异方差性。不同于多元线性回归的最小二乘估计法则(残差平方和最小),Logistic 变换的非线性特征采用极大似然估计的方法寻求最佳的回归系数。因此评价模型的拟合度的标准变为似然值而非离差平方和。 定义1 称事件发生与不发生的概率比为 优势比(比数比 odds ratio 简称OR),形式上表示为 OR= k x k x e p p βββ+++=- 1101 (4) 定义2 Logistic 回归模型是通过极大似然估计法得到的,故模型好坏的评价准则有似然值来表征,称 -2?ln ()L β 为估计值β?的拟合似然度,该值越小越好,如果模型完全拟合,则似然值?()L β为1,而拟合似然度达到最小,值为0。其中?()lnL β 表示β?的对数似然函数值。 定义3 记)?(β Var 为估计值β?的方差-协方差矩阵,2 1 )]?([)?(ββVar S =为β?的标准差矩阵,则称 k i S w ii i i ,,2,1,]?[ 2 ==β (5) 为i β?的Wald 统计量,在大样本时,i w 近似服从)1(2 χ分布,通过它实现对系数的显著性检验。
MATLAB模型预测控制工具箱函数
M A T L A B模型预测控制 工具箱函数 TTA standardization office【TTA 5AB- TTAK 08- TTA 2C】
M A T L A B模型预测控制工具箱函数 系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2 模型建立与转换函数 模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型; ⑤MPC传递函数模型。
在上述5种模型格式中,前两种模型格式是MATLAB通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC状态空间模型和MPC传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC状态空间模型之间的转换 MPC状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod()和mod2ss()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC状态空间模型函数ss2mod() 该函数的调用格式为 pmod= ss2mod(A,B,C,D) pmod= ss2mod(A,B,C,D,minfo) pmod= ss2mod(A,B,C,D,minfo,x0,u0,y0,f0) 式中,A, B, C, D为通用状态空间矩阵; minfo为构成MPC状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆minfo(1)=dt,系统采样周期,默认值为1; ◆minfo(2)=n,系统阶次,默认值为系统矩阵A的阶次; ◆minfo(3)=nu,受控输入的个数,默认值为系统输入的维数; ◆minfo(4)=nd,测量扰的数目,默认值为0; ◆minfo(5)=nw,未测量扰动的数目,默认值为0; ◆minfo(6)=nym,测量输出的数目,默认值系统输出的维数; ◆minfo(7)=nyu,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o,则取默认值。 x0, u0, y0, f0为线性化条件,默认值均为0; pmod为系统的MPC状态空间模型格式。 例8-5将如下以传递函数表示的系统模型转换为MPC状态空间模型。 解:MATLAB命令如下:
对线性回归逻辑回归各种回归的概念学习以与一些误差等具体含义
对线性回归、逻辑回归、各种回归的概念学习回归问题的条件/前提: 1)收集的数据 2)假设的模型,即一个函数,这个函数里含有未知的参数,通过学习,可以估计出参数。然后利用这个模型去预测/分类新的数据。 1. 线性回归 假设特征和结果都满足线性。即不大于一次方。这个是针对收集的数据而言。 收集的数据中,每一个分量,就可以看做一个特征数据。每个特征至少对应一个未知的参数。这样就形成了一个线性模型函数,向量表示形式: 这个就是一个组合问题,已知一些数据,如何求里面的未知参数,给出一个最优解。一个线性矩阵方程,直接求解,很可能无法直接求解。有唯一解的数据集,微乎其微。 基本上都是解不存在的超定方程组。因此,需要退一步,将参数求解问题,转化为求最小误差问题,求出一个最接近的解,这就是一个松弛求解。 求一个最接近解,直观上,就能想到,误差最小的表达形式。仍然是一个含未知参数的线性模型,一堆观测数据,其模型与数据的误差最小的形式,模型与数据差的平方和最小: 这就是损失函数的来源。接下来,就是求解这个函数的方法,有最小二乘法,梯度下降法。 https://www.360docs.net/doc/376087360.html,/wiki/%E7%BA%BF%E6%80%A7%E6%96%B9%E7%A8%8B%E7%BB%84 最小二乘法 是一个直接的数学求解公式,不过它要求X是列满秩的, 梯度下降法 分别有梯度下降法,批梯度下降法,增量梯度下降。本质上,都是偏导数,步长/最佳学习率,更新,收敛的
问题。这个算法只是最优化原理中的一个普通的方法,可以结合最优化原理来学,就容易理解了。 2. 逻辑回归 逻辑回归与线性回归的联系、异同? 逻辑回归的模型是一个非线性模型,sigmoid函数,又称逻辑回归函数。但是它本质上又是一个线性回归模型,因为除去sigmoid映射函数关系,其他的步骤,算法都是线性回归的。可以说,逻辑回归,都是以线性回归为理论支持的。只不过,线性模型,无法做到sigmoid的非线性形式,sigmoid可以轻松处理0/1分类问题。 另外它的推导含义:仍然与线性回归的最大似然估计推导相同,最大似然函数连续积(这里的分布,可以使伯努利分布,或泊松分布等其他分布形式),求导,得损失函数。 逻辑回归函数 表现了0,1分类的形式。 应用举例: 是否垃圾分类? 是否肿瘤、癌症诊断? 是否金融欺诈? 3. 一般线性回归 线性回归是以高斯分布为误差分析模型;逻辑回归采用的是伯努利分布分析误差。 而高斯分布、伯努利分布、贝塔分布、迪特里特分布,都属于指数分布。 而一般线性回归,在x条件下,y的概率分布p(y|x) 就是指指数分布.
模型预测控制快速求解算法
模型预测控制快速求解算法 模型预测控制(Model Predictive Control,MPC)是一种基于在线计算的控制优化算法,能够统一处理带约束的多参数优化控制问题。当被控对象结构和环境相对复杂时,模型预测控制需选择较大的预测时域和控制时域,因此大大增加了在线求解的计算时间,同时降低了控制效果。从现有的算法来看,模型预测控制通常只适用于采样时间较大、动态过程变化较慢的系统中。因此,研究快速模型预测控制算法具有一定的理论意义和应用价值。 虽然MPC方法为适应当今复杂的工业环境已经发展出各种智能预测控制方法,在工业领域中也得到了一定应用,但是算法的理论分析和实际应用之间仍然存在着一定差距,尤其在多输入多输出系统、非线性特性及参数时变的系统和结果不确定的系统中。预测控制方法发展至今,仍然存在一些问题,具体如下: ①模型难以建立。模型是预测控制方法的基础,因此建立的模型越精确,预测控制效果越好。尽管模型辨识技术已经在预测控制方法的建模过程中得以应用,但是仍无法建立非常精确的系统模型。 ②在线计算过程不够优化。预测控制方法的一大特征是在线优化,即根据系统当前状态、性能指标和约束条件进行在线计算得到当前状态的控制律。在在线优化过程中,当前的优化算法主要有线性规划、二次规划和非线性规划等。在线性系统中,预测控制的在线计算过程大多数采用二次规划方法进行求解,但若被控对象的输入输出个数较多或预测时域较大时,该优化方法的在线计算效率也会无法满足系统快速性需求。而在非线性系统中,在线优化过程通常采用序列二次优化算法,但该方法的在线计算成本相对较高且不能完全保证系统稳定,因此也需要不断改进。 ③误差问题。由于系统建模往往不够精确,且被控系统中往往存在各种干扰,预测控制方法的预测值和实际值之间一定会产生误差。虽然建模误差可以通过补偿进行校正,干扰误差可以通过反馈进行校正,但是当系统更复杂时,上述两种校正结合起来也无法将误差控制在一定范围内。 模型预测控制区别于其它算法的最大特征是处理多变量多约束线性系统的能力,但随着被控对象的输入输出个数的增多,预测控制方法为保证控制输出的精确性,往往会选取较大的预测步长和控制步长,但这样会大大增加在线优化过程的计算量,从而需要更多的计算时间。因此,预测控制方法只能适用于采样周
航天器的姿态与轨道最优控制
航天器的姿态与轨道最优控制 董丽娜唐晓华吴朝俊司渭滨(第八小组) (西安交通大学电气工程学院,陕西省,西安市 710049) 【摘要】从航天器的轨道运动学方程出发, 运用线性离散系统最优控制理论, 提出了一种用于航天器轨道维持与轨道机动的最优控制方法, 建立了相关的最优控制模型并给出了求解该模型的算法。仿真计算结果表明, 本文提出的最优控制方法是正确和可行的。 【关键词】航天器轨道保持轨道机动最佳控制 Optimal Control of Spacecraft State and Orbit Dong LiNa,Tang XiaoHua,Wu ChaoJun,Si WeiBin (EE School of Xi’an Jiaotong university,Xi’an, Shannxi province, 710049)【Abstract】This paper provides a new optimal control method for orbital maintenance and maneuver ,which begins with the kinetics equation of spacecraft and is based on the linear discrete optimal control theory , establishes the relative optimal control model and gives its solution. The simulation results show that the given optimal control method in this paper is correct and feasible. 【Key word】Spacecraft ,Orbital keeping ,Orbital maneuver ,Optimal control 1 引言 一般地,常见的航天器有:运载火箭、人造卫星、载人飞船、宇宙飞船、空间站等。宇宙飞船也称太空飞船,它和航天飞机都是往返于地球和在轨道上运行的航天器(如空间站) 。
MATLAB模型预测控制工具箱函数
MATLAB模型预测控制工具箱函数 8.2 系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2 模型建立与转换函数 8.2.1 模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型;
⑤ MPC 传递函数模型。 在上述5种模型格式中,前两种模型格式是MATLAB 通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC 状态空间模型和MPC 传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC 状态空间模型之间的转换 MPC 状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod ()和mod2ss ()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC 状态空间模型函数ss2mod () 该函数的调用格式为 pmod= ss2mod (A,B,C,D) pmod = ss2mod (A,B,C,D,minfo) pmod = ss2mod (A,B,C,D,minfo,x0,u0,y0,f0) 式中,A, B, C, D 为通用状态空间矩阵; minfo 为构成MPC 状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆ minfo(1)=dt ,系统采样周期,默认值为1; ◆ minfo(2)=n ,系统阶次,默认值为系统矩阵A 的阶次; ◆ minfo(3)=nu ,受控输入的个数,默认值为系统输入的维数; ◆ minfo(4)=nd ,测量扰的数目,默认值为0; ◆ minfo(5)=nw ,未测量扰动的数目,默认值为0; ◆ minfo(6)=nym ,测量输出的数目,默认值系统输出的维数; ◆ minfo(7)=nyu ,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o ,则取默认值。 x0, u0, y0, f0为线性化条件,默认值均为0; pmod 为系统的MPC 状态空间模型格式。 例8-5 将如下以传递函数表示的系统模型转换为MPC 状态空间模型。 1 2213)(232+++++=s s s s s s G 解:MATLAB 命令如下:
逻辑回归模型
?博客园首页 逻辑回归模型 作者:zgw21cn来源:博客园发布时间:2008-08-29 17:21 阅读:7161 次原文链接[收 藏] 1.逻辑回归模型 1.1逻辑回归模型 考虑具有p个独立变量的向量,设条件概率为根据观测量相对于某事件发生的概率。逻辑回归模型可表示为 (1.1) 上式右侧形式的函数称为称为逻辑函数。下图给出其函数图象形式。 其中。如果含有名义变量,则将其变为dummy变量。一个具有k个取值的名义变量,将变为k-1个dummy变量。这样,有 (1.2) 定义不发生事件的条件概率为 (1.3) 那么,事件发生与事件不发生的概率之比为 (1.4)
这个比值称为事件的发生比(the odds of experiencing an event),简称为odds。因为0
最优控制理论课程总结
最优控制理论课程总结 姓名: 肖凯文班级: 自动化1002班学号: 0909100902 任课老师: 彭辉摘要: 最优控制理论是现代控制理论的核心,控制理论的发展来源于控制对象的要求。尽50年来,科学技术的迅速发展,对许多被控对象,如宇宙飞船、导弹、卫星、和现代工业设备的生产过程等的性能提出了更高的要求,在许多情况下要求系统的某种性能指标为最优。这就要求人们对控制问题都必须从最优控制的角度去进行研究分析和设计。最优控制理论研究的主要问题是:根据已建立的被控对象的时域数学模型或频域数学模型,选择一个容许的控制律,使得被控对象按预定要求运行,并使某一性能指标达到最优值[1]。关键字:最优控制理论,现代控制理论,时域数学模型,频域数学模型,控制率Abstract: The Optimal Control Theory is the core of the Modern Control Theory,the development of control theory comes from the requires of the controlled objects、During the50 years, the rapid development of the scientific technology puts more stricter requires forward to mang
controlled objects,such as the spacecraft,the guide missile,the satellite,the productive process of modern industrial facilities,and so on,and requests some performance indexes that will be best in mang cases、To the control problem,it requests people to research ,analyse,and devise from the point of view of the Optimal Control Theory、 There are mang major problems of the Optimal Control Theory studying,such as the building the time domain’s model or the frenquency domain’s model according to the controlled objects,controlling a control law with admitting, making the controlled objects to work according to the scheduled requires, and making the performance index to reseach to a best optimal value、 Keywords: The Optimal Control Theroy, The Modern Control Theroy,The Time Domaint’s Model,The Frequency domain’s Model,The Control Law 一、引言最优控制理论的形成和发展和整个现代自动控制理论的形成和发展分不开的。在20世纪50年代初期,就有人开始发表从工程观点研究最短时间控制问题的文章,尽管其最优性的证明多半借助于几何图形,仅带有启发性质,但毕竟为发展现代控制理论提供了第一批实际模型。由于最优控制问题引人注目的严格表述形式,特别是空间技术的迫切需求,从而吸引了大批科