自动控制原理线性系统的频域分析实验四
武汉工程大学实验报告专业电气自动化班号指导教师
姓名同组者无
M a g n i t u d e (d B )
10
1010101010P h a s e (d
e g )Frequency (rad/sec)
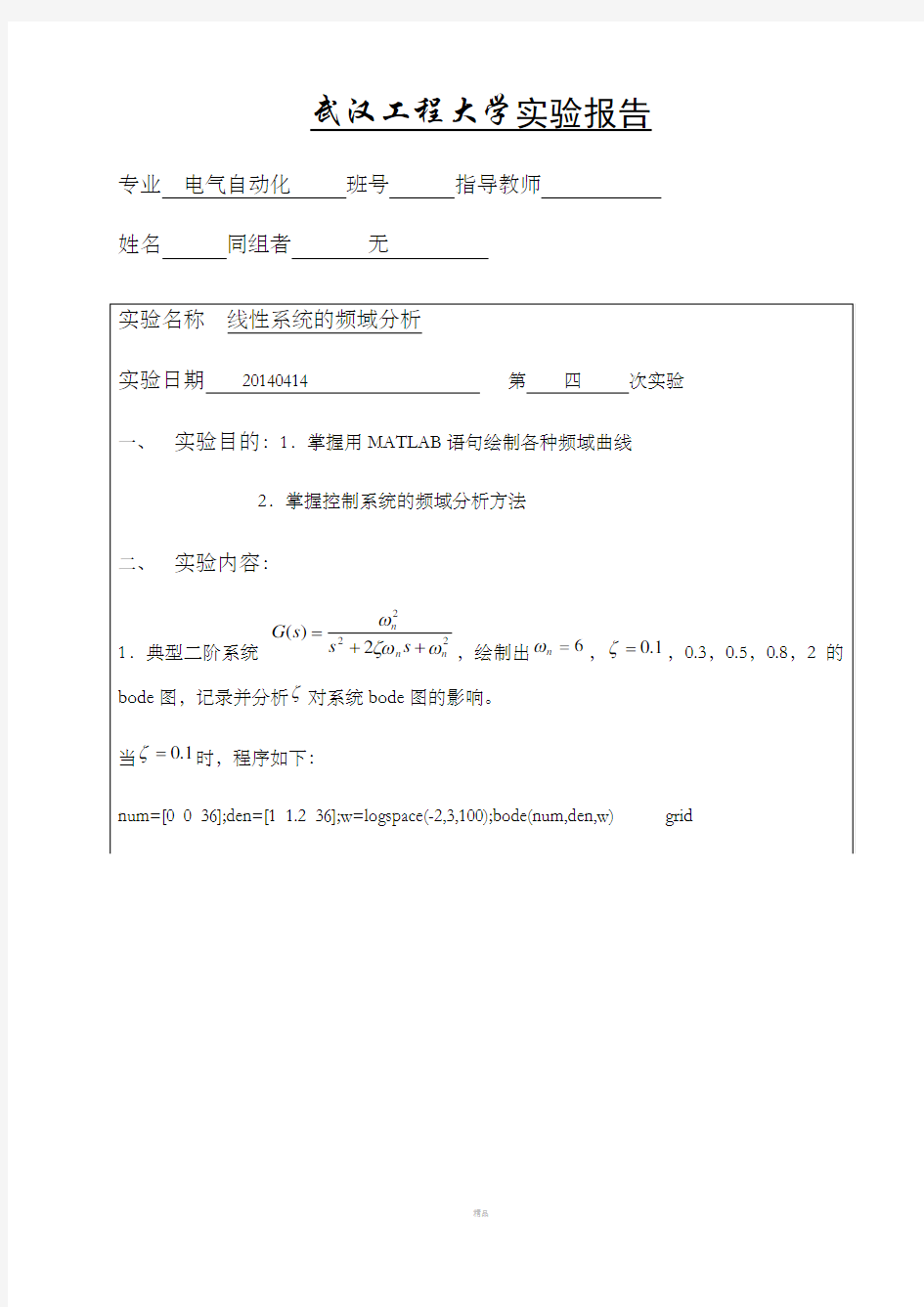
当3.0=ζ时,程序如下:
num=[0 0 36];den=[1 3.6 36];w=logspace(-2,3,100);bode(num,den,w) grid
M a g n i t u d e (d B )
10
1010101010P h a s e (d
e g )Bode Diagram
Frequency (rad/sec)
当5.0=ζ时,程序如下:
num=[0 0 36];den=[1 6 36];w=logspace(-2,3,100);bode(num,den,w) grid
M a g n i t u d e (d B )
10
1010101010P h a s e (d
e g )Frequency (rad/sec)
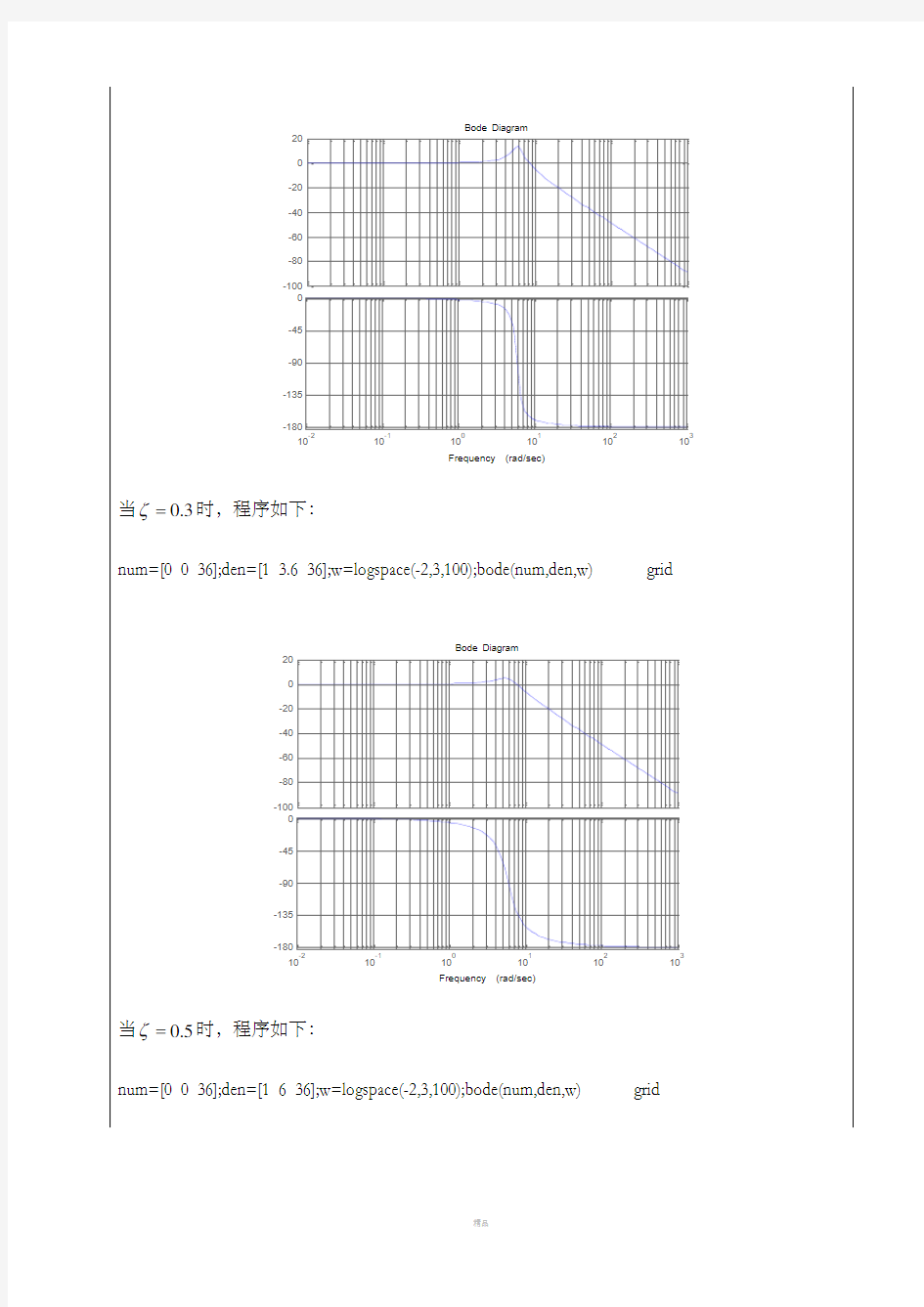
当8.0=ζ时,程序如下:
num=[0 0 36];den=[1 9.6 36];w=logspace(-2,3,100);bode(num,den,w) grid
M a
g n i
t u d e
(d B
)
10
1010101010P h
a
s e (d e g )
Bode Diagram
Frequency (rad/sec)
当2=ζ时,程序如下:
num=[0 0 36];den=[1 24 36];w=logspace(-2,3,100);bode(num,den,w) grid
M a g n i t u d e (d B )
10
1010101010P h a s e (d e g )Frequency (rad/sec)
分析:阻尼比ζ在0.707和1之间的话,伯德图是在横轴下面。阻尼比在0和0.707之间时,
伯德图有一部分在横轴上面,且有峰值。ζ越大系统稳定性越好。
2.系统的开环传递函数为
)5)(15(10)(2+-=s s s s G 、)106)(15()1(8)(22++++=s s s s s s G 、
)11.0)(105.0)(102.0()
13/(4)(++++=s s s s s s G ,绘制系统的Nyquist 曲线、Bode 图和Nichols 图,说
明系统的稳定性,并通过绘制阶跃响应曲线验证。
(1)
)5)(15(10
)(2+-=s s s s G Bode 图程序如下:
num=[0 0 0 0 10];den=[5 24 -5 0 0];bode(num,den) grid
M a g n i t u d e (d B )
10
101010
10P h a s e
(d
e g )Frequency (rad/sec)
Nyquist 曲线程序如下:
num=[0 0 0 0 10];den=[5 24 -5 0 0];[z,p,k]=tf2zp(num,den); p nyquist(num,den)
结果:p =0 0 -5.0000 0.2000
Nyquist Diagram
Real Axis I m a g i n a r y
A x i
s
Nichols 图程序如下:
num=[0 0 0 0 10];den=[5 24 -5 0 0];[mag,phase]=nichols(num,den);
plot(phase,20*log10(mag)) ngrid
)
106)(15()
1(8)(22++++=s s s s s s G
分析:由奈氏图中逆时针包围(-1,j0)点的圈数0和有正实部的开环极点数1可知,系统
不稳定。
阶跃响应验证程序:num=[0 0 0 0 10];den=[5 24 -5 0 0]; step(num,den) grid xlabel('t/s'),ylabel('c(t)')
8Step Response
t/s (sec)c (t )
(2)
Bode 图程序如下:
num=[0 0 0 0 8 8];den=[1 21 100 150 0 0];bode(num,den) grid
M a g n i t u d e (d B )
10
101010
10P
h a s e
(d e g )Bode Diagram
Frequency (rad/sec) Nyquist 曲线程序如下:
num=[0 0 0 0 8 8];den=[1 21 100 150 0 0];[z,p,k]=tf2zp(num,den); p nyquist(num,den) 结果:p =0 0 -15.0000 -3.0000 + 1.0000i -3.0000 - 1.0000i
Nyquist Diagram
Real Axis I m a g i n a r y
A x i s