控制工程基础2010试题A卷
控制工程基础
一、 填空题(每空1分,15题共20分)
1. 控制系统由 控制对象和控制器 两部分组成。
2. 建立系统数学模型的方法有 分析法 和 实验法 两种。
3. 按其数学模型是否满足 叠加性 ,控制系统可分为线性系统和非线性系统。 4.
随动系统是指 在外界作用下,系统的输出能相应于输入在广阔范围内按任意规律变化的系统
5. 经典控制理论采用的数学模型主要 传递函数 以为基础;现代控制理论采用的数学模型主要以为 状态空间方程 基础。
6. 工程上常用的线性化方法是 将非线性函数在平衡点附近展开成Taylor 级数,然后去掉高次项以得到线性函数 。
7. 广义误差平方积分性能指标特点 既不允许大的动态误差e(t)长期存在,又不允许大的误差变化率长期存在 。
8. 校正元件按在系统中的连接方式可分为串联校正、 反馈校正 和 顺馈校正 等。
9. 系统频率特性指标中的谐振频率是指 幅频特性A(ω)出现最大值Amax 时的频率 。
10.系统传递函数与其单位脉冲响应函数的关系是 拉氏反变换 。 11.系统稳定的充要条件是 闭环系统特征根具有负实部 。 12.某线性定常系统的单位斜坡响应为t
e
t t y 2)(-+=,0≥t 。其单位阶跃响应为
t e 221=- 。
13.在工程控制实践中,为使系统有满意的稳定性储备,一般其幅值裕度应满足 大于6dB 或大于2 。
14.最小相位系统是指 传递函数所有零点和极点均在复平面s 的左半平面内 。 15.已知系统开环传递函数为)
1(9
)(+=
s s s G K ,则系统的固有频率、阻尼比以及单位
斜坡输入所引起的稳态误差分别为 3 、 61 、 91 。 二、单项选择题(每题2分,10题共20分)
1.下面关于微分环节的控制作用描述中正确的是: ( D ) (A)使相位滞后 (B)减小系统的阻尼 (C)抗高频干扰 (D)使相位超前 2.稳态误差除了与系统的型别、传递函数有关外,还与下述哪一项有关? ( D ) (A) 阶次 (B) 振荡频率 (C) 阻尼比 (D) 输入信号类型
3.二阶振荡系统幅值衰减的快慢取决于: ( C ) (A) d ω (B)n ξω (C) 特征根实部绝对值 (D) 特征根虚部的分布情况 4.系统输出的拉氏变换完全取决于: ( B ) (A)系统的传递函数的极点位置 (B)系统的初始状态、输入及其传递函数 (C)系统的传递函数 (D)系统的固有特性
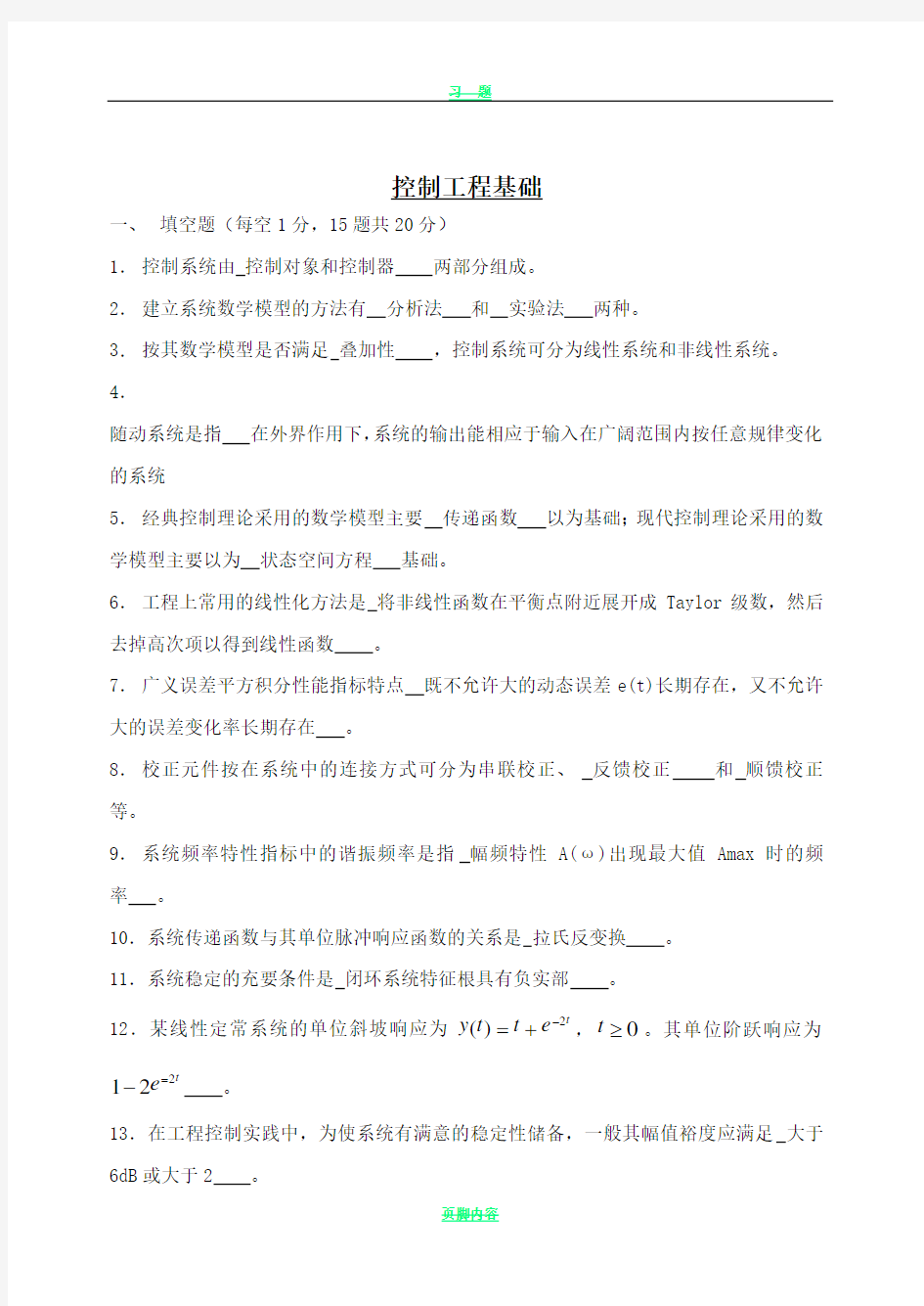
5.相位滞后校正环节相当于: ( A ) (A )低通滤波器 (B )高通滤波器 (C )带通滤波器 (D ) 带阻滤波器 6.下图为一阶系统单位脉冲响应曲线,则下列说明正确的是: ( B )
(A) 系统的输出为0,2)(2≥=-t e
t t
ω (B) 系统的输出为0,)(≥=-t e t t ω
(C) 系统传递函数为)12(1)(+=s s G (D) 系统单位脉冲响应调整时间为2s 7. PI 控制类似于: ( C )
(A) 增益调整 (B) 相位超前校正 (C) 相位滞后校正 (D) 相位滞后-超前校正 8.某单位反馈系统的闭环传递函数为)2(1)(+=s s G ,则输入t t r 2sin 2)(=时稳态输出的
幅
值
为
:
( D )
(A )2 (B )2/2 (C )2 (D )1 9.已知下列系统的开环传递函数为)
1)(1)(1)(1()
1)(1()(432165++++++=
s T s T s T s T s s T s T K s G (所有参
数均大于0),则下图中所给幅相曲线中正确的是: ( A )
10.用Nyquist 稳定判据判断上面第9小题所给开环系统所对应的闭环系统的稳定性,所得结论正确的是: ( D ) (A)0=P ,1=Z ;不稳定 (B)0=P ,2=Z ;不稳定 (C)0=P ,1=Z ;稳定 (D) 0=P ,0=Z ;稳定三、简答题(2题共10分)
1、简述系统开环对数频率特性曲线中三频段分析法及其适用范围。
答: 系统开环对数频率特性曲线可分为低频段、中频段和高频段:低频段通常指幅频特性曲线在第一个转折频率以前的区段(11T <ω),其特性由积分环节和开环增益决定,反映了系统的稳态精度;中频段通常指幅频特性曲线在系统转折频率附近的区段(C C ωωω101.0<<),反映了系统的平稳性和快速性;高频段通常指幅频特性曲线在中频段以后的区段(C ωω10>),反映了系统的抗干扰能力。三频段分析法适用范
围:单位负反馈的最小相位系统且其闭环稳定。
2、相位超前校正与相位滞后校正在应用方面有何不同?
答:相位超前校正常用于系统稳态特性已经满足,响应速度较快,但动态指标如相角裕量过小,超调量过大,调节时间过长的情况。特点:特点:增大了相位裕度,加大了带宽,从而提高了系统的响应速度,动态过程得到了显著改善,但由于系统的增益和型次不变,稳态精度提高较少。
相位滞后校正利用滞后网络的高频衰减特性,使系统校正后截止频率下降,从而获得足够的相角裕度。特点:可以加大低频段和增益,而对高频段影响不大。对于高精度,而快速性要求不高的系统常采用滞后校正,如恒温控制等。
(为了满足严格的稳态性能要求,在采用无源校正网络时,超前校正要求一定的附加增益,而滞后校正一般不需要附加增益;对于同一系统,采用超前校正系统的带宽大于采用滞后校正时的带宽。当输入端电平噪声较高时,一般不宜选用超前网络补偿。)
四、计算题(4题共30分)
1.(4分)系统传递函数方框图如下所示,求其传递函数,要求写出结果即可。
解
:
)
()()()()()()()()()()()(1)
()()()()()(15432134323254321s H s G s G s G s G s G s H s G s G s H s G s G s G s G s G s G s G s G +++=
2.(6分)已知单位反馈系统开环传函为)
15.0(20
)(+=
s s s G 。利用matlab 分别绘制开
环系统N 氏图、bode 图、稳定性图,给出稳定性表示值,并利用单位脉冲响应进行稳定性验证。
解:只要符合要求即可。参考答案如下: clear,
s1=zpk([],[0,-2],40); sb1=feedback(s1,1) figure(1)
subplot(2,2,1);nyquist(s1),grid subplot(2,2,2);bode(s1),grid subplot(2,2,3);margin(s1),grid subplot(2,2,4); impulse (sb1),grid [Gm,Pm,Wcg,Wcp]=margin(s1)
3.(10分)控制系统如图所示,输入信号为2
2
1)(1)(t t t t r ++=,0≥t 。试分析系统稳定性及误差。
解:⑴系统的闭环特征方程:0112
3=+++m m m K K s K K s s T τ (2分)
由劳斯判据可得系统稳定条件: m T ,1K ,m K ,τ均大于零且m T >τ。(3分)
⑵稳态误差分析
系统的开环传递函数为 )
1()
1()(2
1++=
s T s s K K s G m m K τ,为II 型系统,对加速度输入有差。
(2分)
对输入信号2
2
1)(1)(t t t t r ++=,0≥t ,由叠加原理可得统在上述信号作用下的稳态误差为: m
ss K K e 11
=
。(3分)
增大PD 控制器的增益K 1,可以减小对于加速度信号的跟踪误差。 4.(10分)已知最小相位系统开环对数幅频特性曲线如下图所示。 ⑴试给出系统开环传递函数)(s G ,并计算其相位裕量。
⑵若上图为校正后的系统对数幅频特性曲线图,而原有系统的开环传递函数为
2
0)
1.01(100)(s
s s G +=
,求串联校正装置的传递函数)(s G c 。 解:
①12221
(1)
(1)4()1(1)(1)100
K K s K T s W s s T s s s ++==
++。(2分) 120lg 40lg |40k ωω=-=,所以100K =。
2
100(0.251)
()(0.011)
K s W s s s +=
+ 。(2分) 法一---近拟计算:2
1004()1251
c
c c
c A ωωωω?
=
=?=? (2分)
0110009.662501.0tan 2525.0tan 180180)25(180=?-?+-=+=--?γ(2分) (法二---较准确计算: 由图知当100=ω时有:
dB A 05.152
41lg
201
)10001.0(1001)10025.0(100lg
20)100(2
2
2-==+??+?=
68.1740
05
.151lg 100lg lg 100lg =?=--c c ωω
011022.6768.1701.0tan 68.1725.0tan )68.17(180=?-?=+=--?γ)
②2
100(10.1)
s W s +前=,2100(0.251)(0.011)s W s s ++后
=,得: 0.251
(0.011)(0.11)
s W s s +++c =
2分)
)
05.15-
填空
一.填空(每题2分,共30分)
1. 对于控制系统的基本要求表现为三个方面,分别是:稳定性,快速性,准确性。
2. 影响一阶系统响应快速性的主要参数为:时间常数T ,影响二阶系统响应快速性的主要参数为: 无阻尼自然频率ωn 、阻尼比ζ 。
3. 若串联校正环节的传递函数为
1
1
++Ts s τ,当 τ > T 时该环节为相位超前校正。
4. 控制系统的稳态误差大小与系统的类型λ,开环增益K 和 输入信号r (t )有关。
5. 某线性定常系统,当输入为单位阶跃函数时,其输出)(t y 的拉氏变换为)(s Y ,则该系统的传递函数为:sY(s) 。当输入为单位脉冲函数时,其输出为 脉冲响应函数g (t )=y’(t) 。
6. 在系统开环伯德图上,低频段反映了闭环系统的 稳态 特性,中频段反映了闭环系统的 动态 特性,高频段闭环系统的 抗干扰能力 特性。
7. 最小相位系统的定义为:系统开环传递函数G (s )的所有零点和极点均在s 平面的左半平面,若最小相位系统具有4个极点,2个零点,当∞→ω 时,其相位角为:
?-180 。
8. 一系统的开环传递函数为G(s),则其相位裕量γ为:在开环奈奎斯特图上,从原点到奈奎斯特图与单位圆的交点连一直线,该直线与负实轴的夹角 。
9. 系统的稳定性与结构参数 有 关,与外作用 无 关。
10. 若对某系统增加一个靠近虚轴的零点,则该系统的超调量会 增大 。
11. 系统的开环传递函数为G(s)=
1
501
50+-s .s .,则其 =)(ωj G 1 ,
=∠)(ωj G ω5.0arctan 2180-?- 。
12. 截至频率b ω的定义为:系统闭环频率特性的对数幅值下降到其零频率幅值以下3 dB 时的频率,系统的频宽是指:由0至ωb 的频率范围。
13. 闭环系统的谐振峰值定义为 闭环频率特性的幅值M (ω)的最大值M r 。
14. 若已知单位负反馈系统的闭环传递函数为)(s φ,则其开环传递函数)(s G 等于
()()()
s s s G φφ-=
1 。 15. 系统稳定的必要和充分条件是其特征方程的所有的根 都必须为负实数或为具有负实部的复数 。
1. 传递函数的定义是对于线性定常系统,在初始条件为零的条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。
2. 瞬态响应是系统受到外加作用激励后,从初始状态到最终或稳定状态的响应过程。
3. 判别系统稳定性的出发点是系统特征方程的根必须为负实根或负实部的复
数根,即系统的特征根必须全部在复平面的左半平面是系统稳定的充要条
件。 4. I 型系统G s K
s s ()()
=
+2在单位阶跃输入下,稳态误差为 0 ,在单位加速
度输入下,稳态误差为 ∞ 。
5. 频率响应是系统对正弦输入稳态响应,频率特性包括幅频和相频两种特性。
6. 如果系统受扰动后偏离了原工作状态,扰动消失后,系统能自动恢复到原来的工作状态,这样的系统是(渐进)稳定的系统。
7. 传递函数的组成与输入、输出信号无关,仅仅决定于系统本身的结构和参
数,并且只适于零初始条件下的线性定常系统。
8. 系统的稳态误差与输入信号的形式及系统的结构和参数或系统的开环传递函
数有关。
9. 如果在系统中只有离散信号而没有连续信号,则称此系统为离散(数字)控
制系统,其输入、输出关系常用差分方程来描述。
10. 反馈控制系统开环对数幅频特性三频段的划分是以ωc (截止频率)附近的区段为中频段,该段着重反映系统阶跃响应的稳定性和快速性;而低频段主要表明系统的稳态性能。
11. 对于一个自动控制系统的性能要求可以概括为三个方面:稳定性、快速
性和精确或准确性。
二.设有一个系统如图1所示,k 1=1000N/m, k 2=2000N/m, D=10N/(m/s),当系统受到输入信号t t x i sin 5)(= 的作用时,试求系统的稳态输出)(t x o 。(15分)
i
x o
x K K D
解:
()()()1
015.001.021211+=++=s s
k k Ds k k Ds k s X s X i o 然后通过频率特性求出 ()()
14.89sin 025.0+=t t x o
三.一个未知传递函数的被控系统,构成单位反馈闭环。经过测试,得知闭环系统的单位阶跃响应如图2所示。(10分) 问:(1) 系统的开环低频增益K 是多少?(5分)
(2) 如果用主导极点的概念用低阶系统近似该系统,试写出其近似闭环传递函数;(5分)
17/8
解:(1)
007
18
K K =+,07K =
(2)
()
()8
025
.0
7
+
=
s
s
X
s
X
i
o
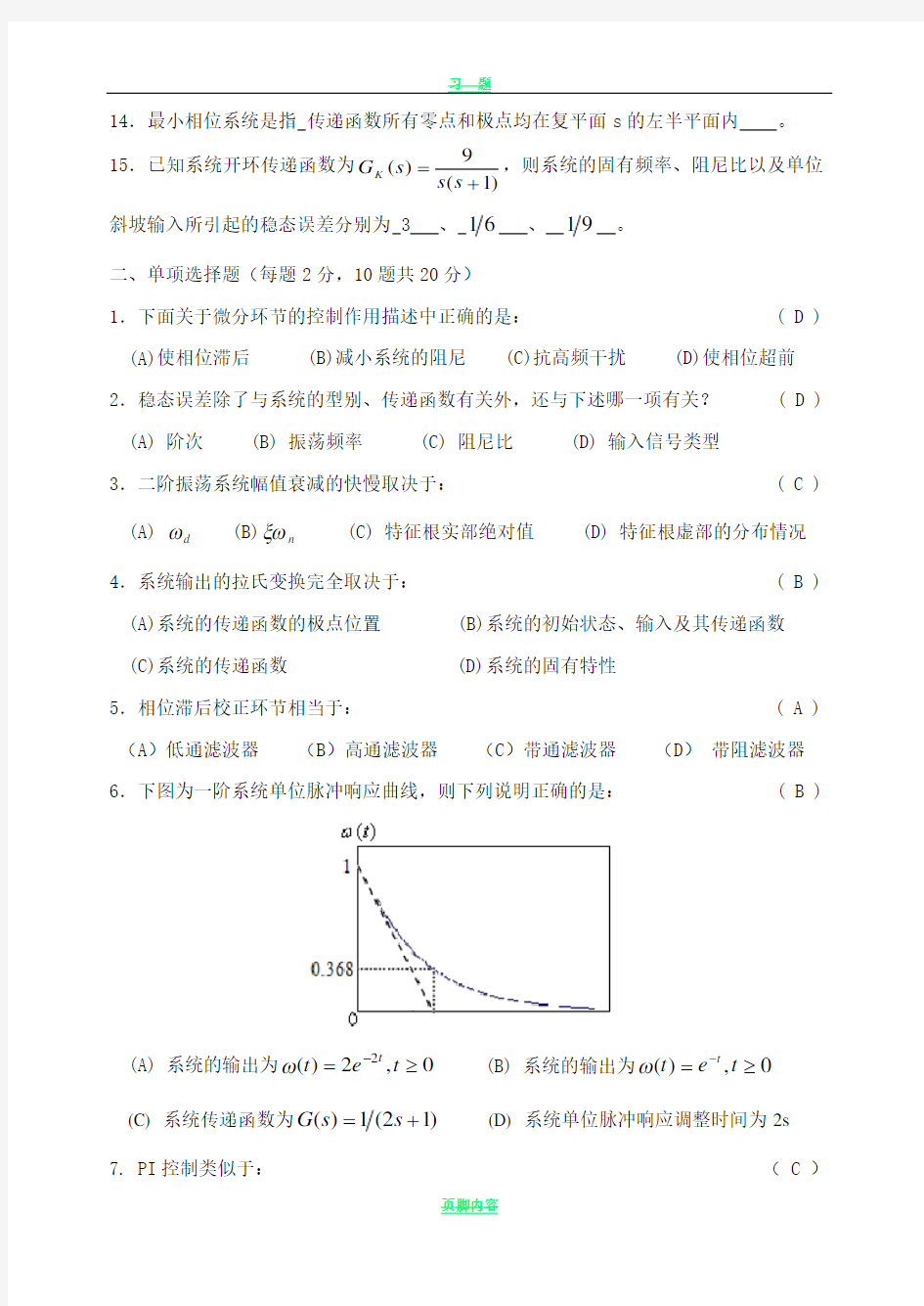
四.已知开环最小相位系统的对数幅频特性如图3所示。(10分)
1. 写出开环传递函数G(s)的表达式;(5分)
2. 概略绘制系统的Nyquist图。(5分)
1.
)
100
s)(
01
.0
s(s
100
)1
100
s
)(
1
01
.0
s
(s
K
)s(
G
+
+
=
+
+
=
??
?
?
?
=
∴
=
ω
100
K
dB
80
K
lg
20
2.
五.已知系统结构如图4所示, 试求:(15分)
1. 绘制系统的信号流图。(5分)
2. 求传递函数
)
(
)
(
s
X
s
X
i
o及
)
(
)
(
s
N
s
X
o。(10分)
G1(s)
X i(s)
+
-
G2(s)
H1(s)
+
-
+ +
N(s)
X o(s)
H2(s)
2
2
1
2
1
2
1
H
G
G
L,
H
G
L-
=
-
=
1
G
G
P
1
2
1
1
=
?
=
2
2
1
1
2
2
1
1
)
(
)
(
H
G
G
H
G
G
G
s
X
s
X
i
o
+
+
=
1
2
1
1
H
G
1
1
P+
=
?
=
2
2
1
1
2
1
2
1
1
)
(
)
(
H
G
G
H
G
H
G
s
N
s
X
o
+
+
+
=
六.系统如图5所示,)(1
)
(t
t
r=为单位阶跃函数,试求:(10分)
1. 系统的阻尼比ξ和无阻尼自然频率ω
n
。(5分)
2. 动态性能指标:超调量M p和调节时间%)
5
(=
?
s
t。(5分)
1.
)
2
s(s
)2
S(S
4
n
2
n
ξω
+
ω
=
+
??
?
?
?
=
ξω
=
ξ
→
=
ω
∴
2
2
5.0
2
n
n
2.%
5.
16
%
100
e
M2
1
p
=
?
=ξ-
ξπ
-
)s(3
2
5.0
3
3
t
n
s
=
?
=
ξω
=
七.如图6所示系统,试确定使系统稳定且在单位斜坡输入下
e
ss
≤225
.时,K的数值。(10分)
K
s9
s6
s
K
)3
s(s
)s(
D2
3
2=
+
+
+
=
+
+
=
由劳斯判据:
K
s 0
6K 54s K
6s 91s 012
3-
第一列系数大于零,则系统稳定得54K 0<<
又有:K
9
e ss =≤2.25
可得:K ≥4
∴ 4≤K <54
八.已知单位反馈系统的闭环传递函数3
2
)(+=Φs s ,试求系统的相位裕量γ。(10分)
解:系统的开环传递函数为1
s 2
)s (W 1)s (W )s (G +=
-=
11
2
|)j (G |2c
c =+ω=
ω,解得3c =ω
?=?-?=ω-?=ω?+?=γ-12060180tg 180)(180c 1c