机械控制工程基础试题和答案5
一、 填空题(每空1分,共20分)
1. 传递函数的定义是对于线性定常系统,在初始条件为零的条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。
2. 瞬态响应是系统受到外加作用激励后,从初始状态到最终或稳定状态的响应过程。
3. 判别系统稳定性的出发点是系统特征方程的根必须为负实根或负实部的复数根,即系统的特征根必须全部在复平面的左半平面是系统稳定的充要条件。
4. I 型系统G s K
s s ()()
=
+2在单位阶跃输入下,稳态误差为 0 ,在单位加速度输入下,
稳态误差为 ∞ 。
5. 频率响应是系统对正弦输入稳态响应,频率特性包括幅频和相频两种特性。
6. 如果系统受扰动后偏离了原工作状态,扰动消失后,系统能自动恢复到原来的工作状态,这样的系统是(渐进)稳定的系统。
7. 传递函数的组成与输入、输出信号无关,仅仅决定于系统本身的结构和参数,并且只适于零初始条件下的线性定常系统。
8. 系统的稳态误差与输入信号的形式及系统的结构和参数或系统的开环传递函数有关。 9. 如果在系统中只有离散信号而没有连续信号,则称此系统为离散(数字)控制系统,其输入、输出关系常用差分方程来描述。
10. 反馈控制系统开环对数幅频特性三频段的划分是以ωc (截止频率)附近的区段为中频段,该段着重反映系统阶跃响应的稳定性和快速性;而低频段主要表明系统的稳态性能。 11. 对于一个自动控制系统的性能要求可以概括为三个方面:稳定性、快速 性和精确或准确性。
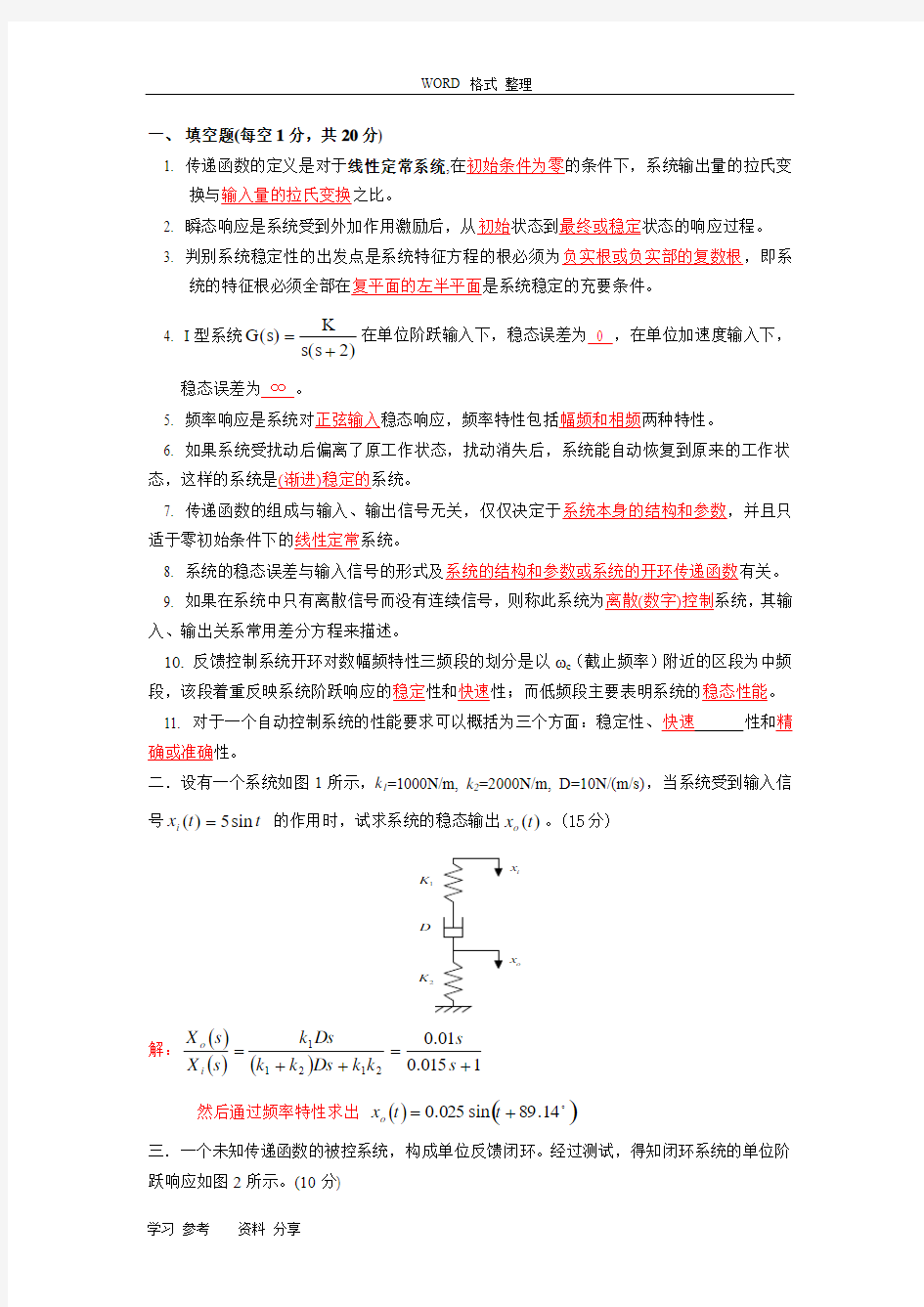
二.设有一个系统如图1所示,k 1=1000N/m, k 2=2000N/m, D=10N/(m/s),当系统受到输入信号t t x i sin 5)(= 的作用时,试求系统的稳态输出)(t x o 。(15分)
i
x o
x K K D
解:
()()()1
015.001.021211+=++=s s
k k Ds k k Ds k s X s X i o 然后通过频率特性求出 ()()
14.89sin 025.0+=t t x o
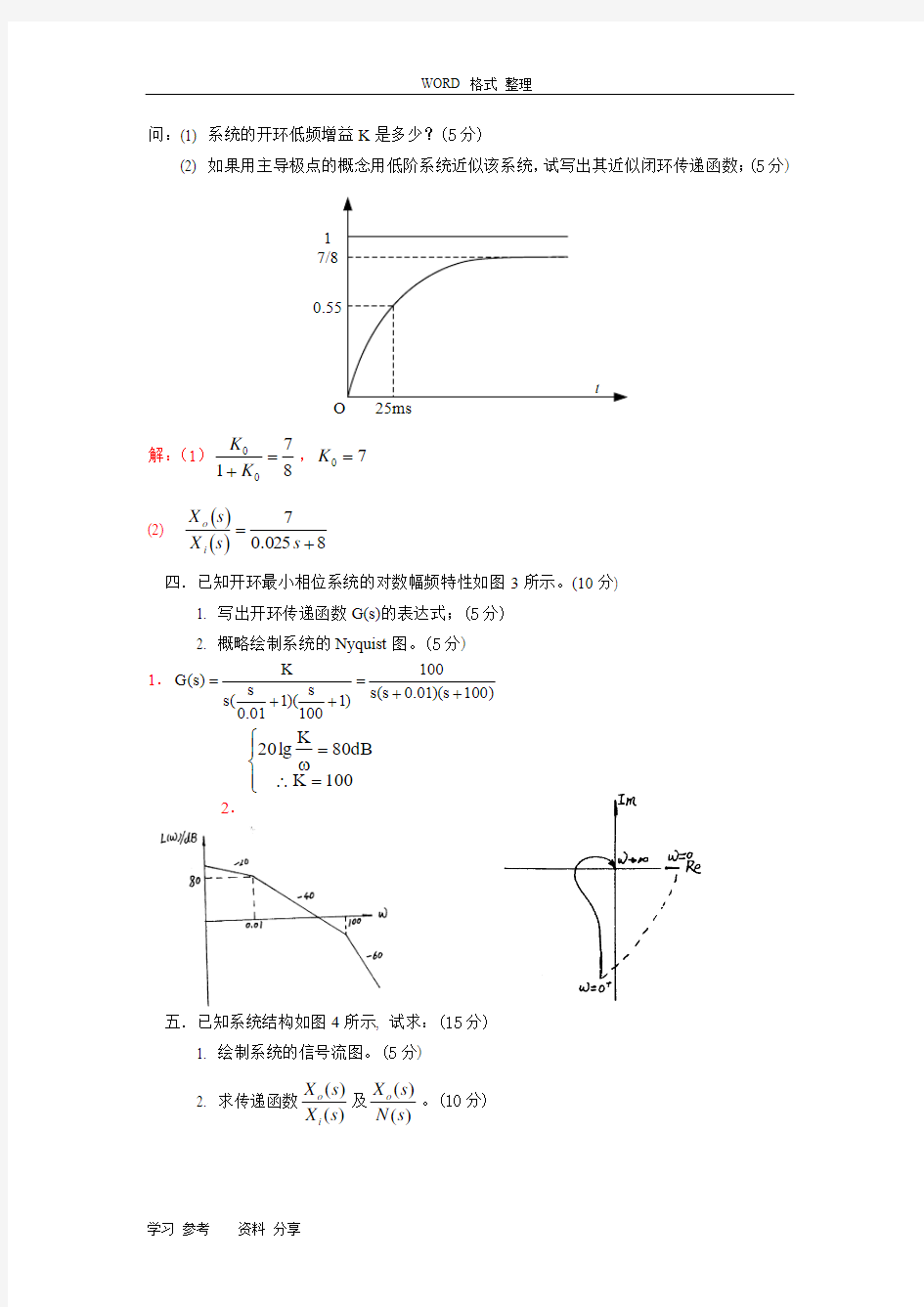
三.一个未知传递函数的被控系统,构成单位反馈闭环。经过测试,得知闭环系统的单位阶跃响应如图2所示。(10分)
问:(1) 系统的开环低频增益K 是多少?(5分)
(2) 如果用主导极点的概念用低阶系统近似该系统,试写出其近似闭环传递函数;(5分)
1
7/8
解:(1)
007
18
K K =+,07K =
(2)
()()8
025.07
+=s s X s X i o 四.已知开环最小相位系统的对数幅频特性如图3所示。(10分)
1. 写出开环传递函数G(s)的表达式;(5分)
2. 概略绘制系统的Nyquist 图。(5分) 1.)
100s )(01.0s (s 100
)1100
s )(101.0s (
s K
)s (G ++=
++=
?????
=∴=ω
100
K dB
80K lg 20 2.
五.已知系统结构如图4所示, 试求:(15分)
1. 绘制系统的信号流图。(5分)
2. 求传递函数
)()(s X s X i o 及)
()
(s N s X o 。(10分)
2212121H G G L ,H G L -=-=
1G G P 1211=?=
2
21122
11)()(H G G H G G G s X s X i o ++= 1211H G 11
P +=?=
2
21121
211)()(H G G H G H G s N s X o +++= 六.系统如图5所示,)(1)(t t r =为单位阶跃函数,试求:(10分) 1. 系统的阻尼比ξ和无阻尼自然频率ωn 。(5分)
2. 动态性能指标:超调量M p 和调节时间%)5(=?s t 。(5分)
1.)
2s (s )2S (S 4n 2n
ξω+ω=+
???
?
?=ξω=ξ→=ω
∴2
25.02n n 2.%5.16%100e
M 2
1p =?=ξ-ξπ
-
)s (32
5.033t n s =?=ξω=
七.如图6所示系统,试确定使系统稳定且在单位斜坡输入下e ss ≤225.时,K 的数值。(10分)
0K s 9s 6s K )3s (s )s (D 232=+++=++=
由劳斯判据:
K
s 0
6K 54s K
6s 91s 0123- 第一列系数大于零,则系统稳定得54K 0<<
又有:K
9
e ss =≤2.25
可得:K ≥4 ∴ 4≤K <54
八.已知单位反馈系统的闭环传递函数3
2
)(+=Φs s ,试求系统的相位裕量γ。(10分) 解:系统的开环传递函数为1
s 2
)s (W 1)s (W )s (G +=
-=
11
2
|)j (G |2c
c =+ω=
ω,解得3c =ω
?=?-?=ω-?=ω?+?=γ-12060180tg 180)(180c 1c
一. 填空题(每小题2分,共20分)
1. 对控制系统的基本要求一般可以归纳为稳定性、快速性 和准确性。
2. 按系统有无反馈,通常可将控制系统分为 开环控制系统 和 闭环控制系统 。 3. 在控制工程基础课程中描述系统的数学模型有微分方程 、传递函数等。
4. 稳态误差反映出稳态响应偏离系统希望值的程度,它用来衡量系统控制精度的程度。 5. 一阶系统
1
1
Ts +的单位阶跃响应的表达是/1t T e --。 6. 有系统的性能指标按照其类型分为时域性能指标和频域性能指标。 7. 频率响应是线性定常系统对正弦输入的稳态响应。
8. 稳态误差不仅取决于系统自身的结构参数,而且与输入信号的类型有关。 9. 脉冲信号可以用来反映系统的抗冲击能力。 10. 阶跃信号的拉氏变换是 1/s 。
二. 图1为利用加热器控制炉温的反馈系统(10分)
炉温控制系统
图1 炉温控制结构图
试求系统的输出量、输入量、被控对象和系统各部分的组成,且画出原理方框图,说明其工作原理。
解答:输出量:炉温。输入量:给定电压信号。被控对象:电炉。
系统包括:电位器、放大器、电机、减速器以及自藕调压器、热电偶。 原理方框图:
三.如图2为电路。求输入电压i u 与输出电压0u 之间的微分方程,并求出该电路的传递函数。(10分)
图2
解答:跟据电压定律得
R
u 0
u i
L C u 0
u i (a)
(b)
(c)
2
2002211i
i u dt u u RC
d u du d u +=+=?
四、求拉氏变换与反变换 1. 求[0.5]t
te -
解答:
2
112(1)s s -- 2. 求
1
3[
](1)(2)
s
s s -++
解答:=t
236t e te ---+
六、 化简框图,并求出闭环传递函数
图4
解:
七、图示机械系统由质量m 、阻尼系数C 、弹簧刚度K 和外力)(t f 组成的机械动力系统。图(a)中)(t x o 是输出位移。当外力)(t f 施加3牛顿阶跃力后,记录仪上记录质量m 物体的时间响应曲线如(b )图所示。试求:
1)该系统的微分方程数学模型和传递函数;(4分)
2)该系统的弹簧刚度质量m 、阻尼系数C 、弹簧刚度k ;(3分)
3)时间响应性能指标:上升时间s t 、调整时间r t 、振荡频数N 、稳态误差ss e (5分)。
1.0
x 0
图(a) 机械系统 图(b )响应曲线
解答:
解:1)对于该系统有:
()()()()t f t kx t x c t x m =++000
故
()k
cs ms s G ++=
21
2)求k 由Laplace 变换的终值定理可知:
()()()s X s t x x s t 00
00lim lim ?==∞→∞
→
s
k cs ms s s 3
1lim 20
?
++=→ k
3= 而()∞0x =1.0,因此k=3. 求m , 由()()()
%100000?∞∞-=x x t x M p p 得:
%5.9%1000
.1095
.0=?=
p M 又由式%1002
1?=--ξξπ
e
M p 求得ξ=0.6
将==ξ,2p t 0.6代入21ξ
ωπ
ωπ-=
=n d p t 中,得n ω=1.96。 再由2n m
k
ω=求得m=0.78。
求c 由m
c
n =ξω2,求得c=1.83.
3)求s t
==
n
s t ξω3
2.55 (取?=0.05时)
==n
s t ξω4
3.40 (取?=0.02时)
求r t
=-=ξ
ξβ2
1arctan
0.91
=-=
d
r t ωβ
π 2.323 求N
取?=0.05时,πξ
ξ2
15.1-=
N =0.64
取?=0.02时,πξ
ξ2
12-=N =0.85
求ss e
当输入为阶跃信号时,系统的稳态误差为: p
ss K e +=
11
对于0型系统 1==K K p ,代入式中求得: ss e =0.5
八、已知某系统是单位负反馈系统,其开环传递函数1
510
+=
s G k ,则该系统在单位脉冲、单位阶跃和单位恒速信号作用下的ss e 分别是多少?(8分)
解答:该系统为单位负反馈且为0型系统,k=11, 所以该系统在单位阶跃和单位恒速信号作用下的ss e 分别是
11
1
、∞。 在单位脉冲信号作用下的稳态误差为
011
51011
lim )()]
()(1)[(1
lim 00
=?++
?
=?+?
=→→s s s X s H s G s H s e s i s ss
九、设有如图所示的反馈控制系统,试求根据劳斯判据确定传递函数k 值的取值范围
)
()
X s 1
Ts +
解答:k
()(s 1)(s 5)k
G s s =
+++
系统的特征方程:(s 1)(s 5)k 0s +++= 可展开为:3
2
s 5s k 0s +++= 列出劳斯数列:
3210
15s 6k
30-k s 6s k
s
k>0,30-k>0 <0k<30
(完整版)机械控制工程基础习题及答案考试要点
1-3 题1-3图为工业炉温自动控制系统的工作原理图。分析 系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。 题1-3图 炉温自动控制系统原理图 解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比, c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流 电动机驱动。炉子的实际温度用热电偶测量,输出电压f u 。f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。 在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压 r u 。此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停 留在某个合适的位置上,使c u 保持一定的数值。这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。 当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程: 控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。 ?→T C ?→↑→↑→↑→↑→↑→↓→↓T u u u u u c a e f θ1C ↑ 系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压r u (表征炉温的希望值)。系统方框图见图解1-3。
1-5采用离心调速器的蒸汽机转速控制系统如题1-5图所示。其工作原理是:当蒸汽机带动负载转动的同时,通过圆锥齿轮带动一对飞锤作水平旋转。飞锤通过铰链可带动套筒上下滑动,套筒内装有平衡弹簧,套筒上下滑动时可拨动杠杆,杠杆另一端通过连杆调节供汽阀门的开度。在蒸汽机正常运行时,飞锤旋转所产生的离心力与弹簧的反弹力相平衡,套筒保持某个高度,使阀门处于一个平衡位置。如果由于负载增大使蒸汽机转速ω下降,则飞锤因离心力减小而使套筒向下滑动,并通过杠杆增大供汽阀门的开度,从而使蒸汽机的转速回升。同理,如果由于负载减小使蒸汽机的转速ω增加,则飞锤因离心力增加而使套筒上滑,并通过杠杆减小供汽阀门的开度,迫使蒸汽机转速回落。这样,离心调速器就能自动地抵制负载变化对转速的影响,使蒸汽机的转速ω保持在某个期望值附近。 指出系统中的被控对象、被控量和给定量,画出系统的方框图。 题1-5图蒸汽机转速自动控制系统 解在本系统中,蒸汽机是被控对象,蒸汽机的转速ω是被控量,给定量是设定的蒸汽机希望转速。离心调速器感受转速大小并转换成套筒的位移量,经杠杆传调节供汽阀门,控制蒸汽机的转速,从而构成闭环控制系统。 系统方框图如图解1-5所示。
化学教学论试题5及标准答案
《化学教学论》试题5 一、对下列说法的合理性做出判断,在()中填入正确或错误,并在必要时予以文字修正。 1. 21世纪初化学新教材的内容特别体现化学与社会、科学、技术和环境的联系。()1.正确 2. 从科学教育的功能考察,其广域目标是知识、技能和方法。() 错误(2分)修正:其广域目标是知识、技能、过程、态度。 3. 中学化学新课程标准提出的课程目标有三方面,知识、技能和情感。() 错误(2分)修正:三方面是知识与技能,过程与方法,情感态度与价值观。 4. 化学学习能力是指学生在解题过程中表现出的熟练程度和准确性。() 错误(2分)修正:化学学习能力主要是指学生应用化学知识和科学方法。研究具体化学问题的行为与表现。(1分 5.化学问题解决就是学习与某一化学命题相关内容的知识。() 错误(2分)修正:化学问题解决可以理解为克服化学问题的起始状态与目标状态之间的障碍,填补其间的空隙,使问题状态转变为目标状态的过程。 6.化学教学改革中关于课堂教学过程的本质论述正确的是教师起主导作用。 错误(2分)修正:正确的是师生互动。( 二、简答题 1. 某青年教师按照本校著名化学特级教师“苯的结构和性质”的课堂教学过程,模仿他的内容和方法进行教学,但实际教学效果并不佳。请你从理论上分析可能导致这一结果的原因。 可能性分析:没有了解学生已有的生活经验(2分);对教材的地位和内容不熟悉,不会应用教学策略与方法(2分);缺乏教学经验,教师应变能力差(2分);师生互动少,学生主动探究活动少。( 2. 以“电解质”为例具体说明概念图的制作过程。 上图的制作过程,“电解质”这个核心概念是与“溶液”和“电离”逐个两个概念形成了概念图的中心内容。(1分)
机械控制工程基础第五章练习习题及解答
题型:选择题 题目:关于系统稳定的说法错误的是【】 A.线性系统稳定性与输入无关 B.线性系统稳定性与系统初始状态无关 C.非线性系统稳定性与系统初始状态无关 D.非线性系统稳定性与系统初始状态有关 分析与提示:线性系统稳定性与输入无关;非线性系统稳定性与系统初始状态有关。 答案:C 习题二 题型:填空题 题目:判别系统稳定性的出发点是系统特征方程的根必须为或为具有负实部的复数,即系统的特征根必须全部在是系统稳定的充要条件。 分析与提示:判别系统稳定性的出发点是系统特征方程的根必须为负实数或为具有负实部的复数,即系统的特征根必须全部在复平面的左半平面是系统稳定的充要条件。 答案:负实数、复平面的左半平面 习题三 题型:选择题 题目:一个线性系统稳定与否取决于【】 A.系统的结构和参数 B.系统的输入 C.系统的干扰 D.系统的初始状态 分析与提示:线性系统稳定与否取决于系统本身的结构和参数。 答案:A 习题四 题型:填空题 题目:若系统在的影响下,响应随着时间的推移,逐渐衰减并回到平衡位置,则称该系统是稳定的 分析与提示:若系统在初始状态的影响下(零输入),响应随着时间的推移,逐渐衰减并趋向于零(回到平衡位置),则称该系统是稳定的;反之,若系统的零输入响应发散,则系统是不稳定的。 答案:初始状态 习题五 题型:填空题 题目:系统的稳定决定于的解。 分析与提示:系统的稳定决定于特征方程的解。 答案:特征方程
题型:填空题 题目:胡尔维兹(Hurwitz )判据、劳斯(Routh )判据又称为 判据。 分析与提示:胡尔维兹(Hurwitz )判据、劳斯(Routh )判据,又称为代数稳定性判据。 答案:代数稳定性 习题二 题型:填空题 题目:利用胡尔维兹判据,则系统稳定的充要条件为:特征方程的各项系数均为 ;各阶子行列式都 。 分析与提示:胡尔维兹判据系统稳定的充要条件为:特征方程的各项系数均为正;各阶子行列式都大于零。 答案:正、大于零 习题三 题型:计算题 题目:系统的特征方程为 010532234=++++s s s s 用胡尔维兹判据判别系统的稳定性。 分析与提示:利用胡尔维兹判据,其各阶系数均大于零,计算子行列式。 答案:(1)特征方程的各项系数为 10,5,3,1,201234=====a a a a a 均为正值。 (2) 0131>==?a 0714232 4 132<-=-== ?a a a a a a a a 不满足胡尔维兹行列式全部为正的条件,所以系统不稳定 习题四 题型:计算题 题目:单位反馈系统的开环传递函数为 ()()() 125.011.0++= s s s K s G 利用胡尔维兹判据求使系统稳定的K 值范围。 分析与提示:利用胡尔维兹判据,其各阶系数均大于零,计算子行列式,反求出K 的范围。 答案:系统的闭环特征方程为 ()()0125.011.0=+++K s s s
南理工机械院控制工程基础实验报告
实验1模拟控制系统在阶跃响应下的特性实验 一、实验目的 根据等效仿真原理,利用线性集成运算放大器及分立元件构成电子模拟器, 以干电池作为输入信号,研究控制系统的阶跃时间响应。 二、实验内容 研究一阶与二阶系统结构参数的改变,对系统阶跃时间响应的影响。 三、实验结果及理论分析 1.一阶系统阶跃响应 a. 电容值1uF,阶跃响应波形: b. 电容值2.2uF,阶跃响应波形:
c. 电容值4.4uF,阶跃响应波形: 2?—阶系统阶跃响应数据表 U r= -2.87V R°=505k? R i=500k? R2=496k 其中
T = R2C U c C:)=「(R/R2)U r 误差原因分析: ①电阻值及电容值测量有误差; ②干电池电压测量有误差; ③在示波器上读数时产生误差; ④元器件引脚或者面包板老化,导致电阻变大; ⑤电池内阻的影响输入电阻大小。 ⑥在C=4.4uF的实验中,受硬件限制,读数误差较大3?二阶系统阶跃响应 a.阻尼比为0.1,阶跃响应波形: b.阻尼比为0.5,阶跃响应波形:
4.二阶系统阶跃响应数据表 E R w ( ?) 峰值时间 U o (t p ) 调整时间 稳态终值 超调(%) 震荡次数 C. d. 阻尼比为0.7,阶跃响应波形: 阻尼比为1.0,阶跃响应波形: CHI 反相 带宽限制 伏/格
四、回答问题 1.为什么要在二阶模拟系统中 设置开关K1和K2 ,而且必须 同时动作? 答:K1的作用是用来产生阶跃信号,撤除输入信后,K2则是构成了C2的 放电回路。当K1 一旦闭合(有阶跃信号输入),为使C2不被短路所以K2必须断开,否则系统传递函数不是理论计算的二阶系统。而K1断开后,此时要让 C2尽快放电防止烧坏电路,所以K2要立即闭合。 2.为什么要在二阶模拟系统中设置 F3运算放大器? 答:反相电压跟随器。保证在不影响输入和输出阻抗的情况下将输出电压传递到输入端,作为负反馈。 实验2模拟控制系统的校正实验 一、实验目的 了解校正在控制系统中的作用
2机械控制工程基础第二章答案
习 题 2.1 什么是线性系统其最重要的特性是什么下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统 (1) x x x x x i o o o o 222=++&&& (2) x tx x x i o o o 222=++&&& (3) x x x x i o 222o o =++&&& (4) x tx x x x i o o o 222o =++&&& 解: 凡是能用线性微分方程描述的系统就是线性系统。线性系统的一个最重要特性就是它满足叠加原理。该题中(2)和(3)是线性系统。 2.2 图(题2.2)中三同分别表示了三个机械系统。求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。 图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有 即 x c x c c x m i &&&&1 2 1 o o )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有 消除中间变量有 (3)对图(c)所示系统,由牛顿定律有 即 x k x c x k k x c i i o o 1 2 1 )(+=++&& 2.3求出图(题2.3)所示电系统的微分方程。 图(题2.3) 解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有 消除中间变量,并化简有
u R C u C C R R u R C u R C u C C R R u R C i i i o o o 1 2 2 1 1 2 2 1 2 2 2 1 2 1 2 1 1)()1(1+++=-+ ++&&&&&&& (2)对图(b)所示系统,设i 为电流,则有 消除中间变量,并化简有 2.4 求图(题2.4)所示机械系统的微分方程。图中M 为输入转矩,C m 为圆周阻尼,J 为转动惯量。 解:设系统输入为M (即),输 出θ(即),分别对圆盘和质块进行动力学分析,列写动力学方程如下: 消除中间变量 x ,即可得到系统动力学方程 KM M c M m C R c k KJ c C km R cJ mC mJ m m m ++=++-++++&&&&&&&&&θ θθθ)(2 2 )()() 4(2.5 输出y(t)与输入x(t)的关系为y(t)= 2x(t)+0.5x 3(t)。 (1)求当工作点为x o =0,x o =1,x o =2时相应的稳态时输出值; (2)在这些工作点处作小偏差线性化模型,并以对工作的偏差来定
5-普通话试卷标准答案
国家普通话水平测试试卷答案 编号:I/II-20071205 一、读单音节字词(100个音节,共10分,限时3.5分钟) zòu qīnɡkuǎpínɡjìhénɡpài quán chuīcì揍卿垮评忌恒派全吹次xuétiěhuānɡduǒbèn shuǎnɡzhéɡōuái shā穴铁荒躲笨爽辙钩癌砂líkǎo tánɡsǎhánɡɡēn rónɡshuìér lǚ梨烤糖洒航根融税儿旅bōdéān zuàn wǒfùcǎn xùnɡuǎi ná波德庵攥我妇惨训拐拿ruǎn hōnɡmièzhēn tián yāshǐzhuāwèi qiāo 软烘灭臻田鸭始抓位跷mǐchuān miǎo xiàkōu bǎi juān sìcuōzhànɡ米穿秒下抠摆捐四搓帐kuánɡwènɡdiūqìyǔlènɡnínɡǔpín tān 狂瓮丢泣语愣您谷贫摊qǔjuēchírùn yān xìn sāi mòFénɡdào 取撅迟润焉信腮莫冯稻wēn léi nèn yún jiǔpáo yònɡzúfǎnɡliánɡ瘟镭嫩云灸袍用族访梁bǎzhuōbǎo cènɡmínɡfěi kuài jiǎnɡxiōnɡpǔ靶桌饱蹭明匪快奖胸圃
编号:I/II-20071205 二、读多音节词语(100个音节,共20分,限时2.5分钟) piēkāi qúnzhònɡ jiǒnɡpò tíchéngr rìyì kuīsǔn huáiniàn 撇开 群众 窘迫 提成儿 日益 亏损 怀念 wādì nánnǚ xǐ·huɑn jūnfá xiàoɡuǒ shé·tou bànɡwǎn 洼地 男女 喜欢 军阀 效果 舌头 傍晚 shēnhuà xiànzhóur xiézuò dìnɡ’é suíbiàn fēnpèi niúzǎikù 深化 线轴儿 协作 定额 随便 分配 牛仔裤 miánqiǎnɡ qiónɡrén cuīhuǐ dàɡuàr rénɡrán shuàilǐnɡ mǔ·qīn 勉强 穷人 摧毁 大褂儿 仍然 率领 母亲 ánɡyánɡ zhà·lɑn fósì xuánzhuǎ yuányīn jiàɡé chánɡjǐnɡlù 昂扬 栅栏 佛寺 旋转 原因 价格 长颈鹿 zhuānɡbèi jù·zi cāozònɡ dòulèr shóuɡǎo cáiliào ɡuānchá 装备 句子 操纵 逗乐儿 手稿 材料 观察 qiàhǎo wánɡfǎn miùlùn biāozhì nüèdài bùyuē’értónɡ 恰好 往返 谬论 标志 虐待 不约而同 三、 朗读短文(400个音节,共30分,限时4分钟)作品26号 《落花生》 我w ǒ 们men 家ji ā 的de 后h òu 园yu án 有y ǒu 半b àn 亩m ǔ 空k òn ɡ 地d ì ,母m ǔ 亲q īn 说shu ō :“让r àn ɡ 它t ā 荒hu ɑn ɡ 着zhe 怪ɡu ài 可k ě 惜x ī 的de ,你n ǐ 们men 那n à 么me 爱ài 吃ch ī 花hu ā 生sh ēn ɡ ,就ji ù 开k āi 辟p ì 出ch ū 来l ái 种zh ǒn ɡ 花hu ā 生sh ēn ɡ 吧b ɑ 。”我w ǒ 们men 姐ji ě 弟d ì 几j ǐ 个ɡè 都d ōu 很h ěn 高ɡāo 兴x ìn ɡ ,买m ǎi 种zh ǒn ɡ ,翻f ān 地de ,播b ō 种zh ǒng , 浇ji āo 水shu ǐ ,没m éi 过ɡu ò 几j ǐ 个ɡè 月yu è ,居j ū 然r án 收sh ōu 获hu ò 了le 。 母m ǔ 亲q īn 说shu ō :“今j īn 晚w ǎn 我w ǒ 们men 过ɡu ò 一y ī 个ɡè 收sh ōu 获hu ò 节ji é ,请q ǐn ɡ 你n ǐ 们men 父f ù 亲q īn 也y ě 来l ái 尝ch án ɡ 尝ch án ɡ我w ǒ 们men 的de 新x īn 花hu ā 生sh ēn ɡ ,好h ǎo 不b ù 好h ǎo ?”我w ǒ 们men 都d ōu 说shu ō 好h ǎo 。母m ǔ
西安交通大学17年3月课程考试《机械控制工程基础》作业考核试题
西安交通大学17年3月课程考试《机械控制工程基础》作业考核试题 一、单选题(共30 道试题,共60 分。) 1. 一个系统稳定的充要条件是系统的全部极点都在[S]平面的() A. 右半平面内 B. 上半平面内 C. 左半平面内 D. 下半平面内 正确答案: 2. 拉氏变换将时间函数变换成() A. 正弦函数 B. 单位阶跃函数 C. 单位脉冲函数 D. 复变函数 正确答案: 3. 一阶系统的阶跃响应,( ) A. 当时间常数T较大时有振荡 B. 当时间常数T较小时有振荡 C. 有振荡 D. 无振荡 正确答案: 4. 系统稳定的必要和充分条件是其特征方程的所有的根都必须为() A. 负实数或为具有负实部的复数 B. 正实数 C. 具有正实数的复数 D. 具有负实数的复数 正确答案: 5. 一个线性系统稳定与否取决于() A. 系统的结构和参数 B. 系统的输入 C. 系统的干扰 D. 系统的初始状态 正确答案: 6. 关于系统模型的说法,正确的是() A. 每个系统只有一种数据模型 B. 动态模型在一定条件下可简化为静态模型 C. 动态模型比静态模型好
D. 静态模型比动态模型好 正确答案: 7. 最小相位系统的定义为:系统开环传递函数G(s)的所有零点和极点均在s平面的() A. 左半平面 B. 左半平面 C. 上半平面 D. 下半平面 正确答案: 8. 二阶欠阻尼系统的上升时间为() A. 阶跃响应曲线第一次达到稳定值的98%的时间 B. 阶跃响应曲线达到稳定值的时 C. 阶跃响应曲线第一次达到稳定值的时间 D. 阶跃响应曲线达到稳定值的98%的时间 正确答案: 9. 系统的传递函数() A. 与外界无关 B. 反映了系统、输出、输入三者之间的关系 C. 完全反映了系统的动态特性 D. 与系统的初始状态有关 正确答案: 10. 线性定常系统的传递函数,是在零初始条件下() A. 系统输出信号与输入信号之比 B. 系统输入信号与输出信号之比 C. 系统输入信号的拉氏变换与输出信号的拉氏变换之比 D. 系统输出信号的拉氏变换与输入信号的拉氏变换之比 正确答案: 11. 某线性定常系统,当输入为单位阶跃函数时,该系统的传递函数为( ) A. sY(s) B. s+Y(s) C. s-Y(s) D. ssY(s) 正确答案: 12. 二阶系统的阻尼比ζ,等于( ) A. 系统的粘性阻尼系数 B. 临界阻尼系数与系统粘性阻尼系数之比 C. 系统粘性阻尼系数与临界阻尼系数之比 D. 系统粘性阻尼系数的倒数 正确答案: 13. 关于反馈的说法,正确的是() A. 反馈实质上就是信号的并联 B. 反馈都是人为加入的 C. 正反馈就是输入信号与反馈相加 D. 反馈就是输出以不同方式作用于系统 正确答案:
机械控制工程基础复习题及参考答案
一、单项选择题: 1. 某二阶系统阻尼比为0,则系统阶跃响应为 A. 发散振荡 B. 单调衰减 C. 衰减振荡 D. 等幅振荡 2. 一阶系统G(s)=1 +Ts K 的时间常数T 越小,则系统的输出响应达到稳态值的时间 A .越长 B .越短 C .不变 D .不定 3. 传递函数反映了系统的动态性能,它与下列哪项因素有关? A.输入信号 B.初始条件 C.系统的结构参数 D.输入信号和初始条件 4.惯性环节的相频特性)(ωθ,当∞→ω时,其相位移)(∞θ为 A .-270° B .-180° C .-90° D .0° 5.设积分环节的传递函数为G(s)= s 1 ,则其频率特性幅值M(ω)= A. ωK B. 2K ω C. ω1 D. 21ω 6. 有一线性系统,其输入分别为u 1(t)和u 2(t)时,输出分别为y 1(t)和y 2(t)。当输入为a 1u 1(t)+a 2u 2(t)时(a 1,a 2为常数),输出应为 A. a 1y 1(t)+y 2(t) B. a 1y 1(t)+a 2y 2(t) C. a 1y 1(t)-a 2y 2(t) D. y 1(t)+a 2y 2(t) 7.拉氏变换将时间函数变换成 A .正弦函数 B .单位阶跃函数 C .单位脉冲函数 D .复变函数 8.二阶系统当0<ζ<1时,如果减小ζ,则输出响应的最大超调量%σ将 A.增加 B.减小 C.不变 D.不定 9.线性定常系统的传递函数,是在零初始条件下 A .系统输出信号与输入信号之比 B .系统输入信号与输出信号之比 C .系统输入信号的拉氏变换与输出信号的拉氏变换之比 D .系统输出信号的拉氏变换与输入信号的拉氏变换之比 10.余弦函数cos t ω的拉氏变换是 A.ω+s 1 B.2 2s ω+ω C.22s s ω+ D. 2 2s 1ω + 11. 微分环节的频率特性相位移θ(ω)= A. 90° B. -90° C. 0° D. -180° 12. II 型系统开环对数幅频渐近特性的低频段斜率为 A. -40(dB/dec) B. -20(dB/dec) C. 0(dB/dec) D. +20(dB/dec) 13.令线性定常系统传递函数的分母多项式为零,则可得到系统的
2机械控制工程基础第二章答案
习 题 2.1 什么是线性系统?其最重要的特性是什么?下列用微分方程表示的系统中,x o 表示系统输出,x i 表示系统输入,哪些是线性系统? (1) x x x x x i o o o o 222=++ (2) x tx x x i o o o 222=++ (3) x x x x i o 222o o =++ (4) x tx x x x i o o o 222o =++ 解: 凡是能用线性微分方程描述的系统就是线性系统。线性系统的一个最重要特性就是它满足叠加原理。该题中(2)和(3)是线性系统。 2.2 图(题2.2)中三同分别表示了三个机械系统。求出它们各自的微分方程,图中x i 表示输入位移,x o 表示输出位移,假设输出端无负载效应。 图(题2.2) 解: (1)对图(a)所示系统,由牛顿定律有
x m x c x x c i o o 2 o 1 )(=-- 即 x c x c c x m i 1 2 1 o o )(=++ (2)对图(b)所示系统,引入一中间变量x,并由牛顿定律有 )1()()(1 x x c k x x o i -=- )2()(2 x k x x c o o =- 消除中间变量有 x ck x k k x k k c i o 1 2 1 o 2 1 )(=-- (3)对图(c)所示系统,由牛顿定律有 x k x x k x x c o o i o i 2 1 )()(=-+- 即 x k x c x k k x c i i o o 1 2 1 )(+=++ 2.3求出图(题2.3)所示电系统的微分方程。 图(题2.3) 解:(1)对图(a)所示系统,设i 1为流过R 1的电流,i 为总电流,则有 ?+=idt C i R u o 12 2 i R u u o i 1 1=-
教育学第五章试题及标准答案
教育学第五章试题及答案
————————————————————————————————作者:————————————————————————————————日期: 2
一、单项选择题(下列各题所给选项中只有一个符合题意的正确答案,答错、不答或多答均不得分) 1.学生具有发展的可能性和()。 A.潜在性 B.现实性 C.特殊性 D.可塑性 2.“师者,所以传道、授业、解惑也”出自()。 A.《学记》 B.《师说》 C.《论语》 D.《春秋》 3.社会环境对个体的客观要求所引起的需要与个体的发展水平之间的矛盾运动,是推动个体由自然人向社会人转变的( A.动力 B.动机 C.条件 D.基础 7.《中华人民共和国教师法》颁布于()。 A.1978年 B.1985年 C.1993年 D.1995年 8.当代教师素质能力的集中体现是()。 A.教师的个人修养 B.教师的专业素养 C.教师的品质 D.师生关系 9.教师的教育素养基本上包括两个方面,一是(),二是教育技巧。 A.教育理论 B.教育手段 C.教育思想 D.思想品质 10.教师胜任教学工作的基础性要求是,必须具有()。 A.学科专业素养 B.教育专业素养 C.品德专业素养 D.职业道德素养 11.教师职业的特殊要求是,必须具有()。 A.管理能力B.控制能力 C.教育能力 D.研究能力 12.“为人师表”是说教师必须具备()。 A.专业意识 B.专业态度 C.专业技能 D.专业品质 13.学生主体性的形成,既是教育的目的,也是教育成功的()。 A.条件 B.任务 C.途径 D.结果 17.提出“教师一方面要贡献出自己的东西,另一方面又要像海绵一样,从人民中生活中和科学中吸取一切优良的东西后再把这些优良的东西贡献给学生”的教育家是()。 A.列宁 B.加里宁 C.苏霍姆林斯基 D.陶行知 18.教师最基本的权利是()。 A.管理学生权 B.科研学术活动权 C.民主管理权 D.教育教学权 19.教师专业发展的阶段性表明,教师任职期间应接受()。 A.高等教育 B.在职培训 C.继续教育 D.终身教育 20.一位教育工作者的真正威信在于他的()。 A.权利 B.威严 C.权威 D.人格力量 21.“以身立教”,“为人师表”体现了教师劳动的()特点。 A.示范性 B.复杂性 C.创造性 D.劳动方式个体性 22.教师的工作目的和使命是()。 A.热爱教育事业 B.热爱学生 C.教书育人 D.创新开拓 23.教师专业化的尝试始于()。 A.教师职业的出现 B.师资培训机构的建立 C.教育立法的规定 D.国民教育制度的确立 27.教师的最基本条件是()。 A.承担教育教学职责 B.以教书育人为使命 C.专门从事某一学科的教学 D.具备相应的专业知识 28.每年的9月10日定为“教师节”的决定颁布始于()。 A.1985年 B.1989年 C.1993年 D.1995年
机械控制工程基础试题及答案
一、单项选择题(在每小题的四个被选答案中,选出一个正确的答案,并将其 答案按顺序写在答题纸上,每小题2分,共40分) 1. 闭环控制系统的特点是 A 不必利用输出的反馈信息 B 利用输入与输出之间的偏差对系统进行控制 C 不一定有反馈回路 D 任何时刻输入与输出之间偏差总是零,因此不是用偏差来控制的 2.线性系统与非线性系统的根本区别在于 A 线性系统有外加输入,非线性系统无外加输入 B 线性系统无外加输入,非线性系统有外加输入 C 线性系统满足迭加原理,非线性系统不满足迭加原理 D 线性系统不满足迭加原理,非线性系统满足迭加原理 3. 2 22 )]([b s b s t f L ++=,则)(t f A bt b bt cos sin + B bt bt b cos sin + C bt bt cos sin + D bt b bt b cos sin + 4.已知 ) (1 )(a s s s F += ,且0>a ,则 )(∞f A 0 B a 21 C a 1 D 1 5.已知函数)(t f 如右图所示,则 )(s F A s s e s e s --+2211 B s s e s s 213 212+-- C )22121(1332s s s s se e e se s ------+ D )221(1s s s e e s e s ----+ 6.某系统的传递函数为 ) 3)(10() 10()(+++= s s s s G ,其零、极点是 A 零点 10-=s ,3-=s ;极点 10-=s B 零点 10=s ,3=s ;极点 10=s
C 零点 10-=s ;极点 10-=s ,3-=s D 没有零点;极点 3 =s
机械控制工程基础复习题及复习资料
机械控制工程基础复习题1 1、 选择填空(30分,每小题2分) (下列各题均给出数个答案,但只有一个是正确的,请将正确答案的序号写在空白 处) 1.1在下列典型环节中,属于振荡环节的是 。 (A) 101.010)(2++= s s s G (B) 1 01.01)(2 ++=s s s G (C) 101 )(+=s s G 1.2系统的传递函数定义为在零初始条件下输出量的Laplace 变换与输入量的Laplace 变换之比,其表达式 。 (A )与输入量和输出量二者有关 (B )不仅与输入量和输出量二者有关,还与系统的结构和参数有关 (C )只与系统的结构和参数有关,与输入量和输出量二者无关 1.3系统峰值时间p t 满足 。 (A ) 0)(=p p o dt t dx (B ))()(∞=o p o x t x (C ))()()(∞??≤∞-o o p o x x t x 其中,)(t x o 为系统的单位阶跃响应。 1.4开环传递函数为G (s )的单位反馈系统的静态速度误差系数的计算式为 。 (A) )(lim 0 s G K s v →= (B) )(lim 2 s G s K s v →= (C) )(lim 0 s sG K s v →= 1.5最大百分比超调量(%)p M 的定义式为 。 (A ))()(max (%)∞-=o o p x t x M (B) %100) () ()(max (%)∞∞-= o o o p x x t x M (C )) () (max (%)t x t x M i o p = 其中,)(t x i 为系统的输入量,)(t x o 为系统的单位阶跃响应,)(max t x o 为)(t x o 的最大值。 1.6给同一系统分别输入)sin()(11t R t x i ω=和)sin()(2t R t x r i ω=这两种信号(其中, r ω是系统的谐振频率,1ω是系统正常工作频率范围内的任一频率),设它们对应的稳态输出分别为)sin()(1111?ω+=t C t x o 和)sin()(222?ω+=t C t x r o ,则 成立。 (A )21C C > (B )12C C > (C )21C C = 1.7 若一单位反馈系统的开环传递函数为) ()(1220 a s a s a s G += , 则由系统稳定的必 要条件可知, 。 (A )系统稳定的充分必要条件是常数210,,a a a 均大于0
机械控制工程基础实验报告
中北大学机械与动力工程学院 实验报告 专业名称__________________________________ 实验课程名称______________________________ 实验项目数_______________总学时___________ 班级______________________________________ 学号______________________________________ 姓名______________________________________ 指导教师__________________________________ 协助教师__________________________________ 日期______________年________月______日____
实验二二阶系统阶跃响应 一、实验目的 1.研究二阶系统的特征参数如阻尼比ζ和无阻尼自然频率ω n 对系统动态性能 的影响;定量分析ζ和ω n 与最大超调量Mp、调节时间t S 之间的关系。 2.进一步学习实验系统的使用方法。 3.学会根据系统阶跃响应曲线确定传递函数。 二、实验仪器 1.EL-AT-II型自动控制系统实验箱一台 2.PC计算机一台 三、实验原理 1.模拟实验的基本原理: 控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。若改变系统的参数,还可进一步分析研究参数对系统性能的影响。 2.时域性能指标的测量方法:超调量% σ: 1)启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。 2)测试计算机与实验箱的通信是否正常,通信正常继续。如通信不正常查 找原因使通信正常后才可以继续进行实验。 3)连接被测量典型环节的模拟电路。电路的输入U1接A/D、D/A卡的DA1 输出,电路的输出U2接A/D、D/A卡的AD1输入。检查无误后接通电源。 4)在实验课题下拉菜单中选择实验二[二阶系统阶跃响应] 。 5)鼠标双击实验课题弹出实验课题参数窗口。在参数设置窗口中设置相应 的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果。 6)利用软件上的游标测量响应曲线上的最大值和稳态值,带入下式算出超 调量: Y MAX - Y ∞ % σ=——————×100% Y ∞ t P 与t s :利用软件的游标测量水平方向上从零到达最大值与从零到达95%稳 态值所需的时间值,便可得到t P 与t s 。 四、实验内容 典型二阶系统的闭环传递函数为 ω2 n ?(S)= (1) s2+2ζω n s+ω2 n
机械控制工程基础
机械控制工程基础(专升本) 多选题 1. 微分环节的特点和作用是_______.(5分) (A) 输出提前于输入 (B) 干扰噪声放大 (C) 高通滤波 (D) 作为反馈环节,可改善系统的稳定性 (E) 作为校正环节,使系统的剪切频率增大 标准答案是:A,B,C,D,E 2. 闭环控制系统必不可少的环节有_______.(5分) (A) 输入输出 (B) 被控对象 (C) 测量环节 (D) 校正环节 (E) 比较环节 标准答案是:A,B,C,D,E 3. 若系统的传递函数为G(s)=10(s+5)/[s2(s+2)(s2+0.2s+100)],则其特性是_______.(5分) (A) 其奈奎斯特曲线在频率趋于零时的起点处,应平行于负实轴 (B) 其奈奎斯特曲线在频率趋于无穷大的终点处,应平行于正实轴,并进入坐标原点 (C) 其Bode图的转折频率依次为2,3.14,10,50 (D) 其Bode图的幅频特性的斜率依次为[-40],[-60],[-100],[-80]dB/Dec (E) 系统的增益为5/2 标准答案是:A,B,C,D 4. 工程实际中常用的典型测试信号有________.(5分) (A) 脉冲信号 (B) 阶跃信号 (C) 斜坡信号 (D) 抛物线信号 (E) 正弦信号 标准答案是:A,B,C,D,E 5. PID调节器与无源器件的相位滞后-超前校正器在原理上的区别有_______.(5分) (A) PID调节器在低频段的斜率为-20dB/Dec,相位滞后-超前校正器的低频段斜率为0dB/Dec (B) PID 调节器的高频段的斜率为+20dB/Dec,相位滞后-超前校正器的高频段斜率为0dB/Dec (C) PID调节器对高频噪声敏感,无源器件的相位滞后超前校正器则不放大高频噪声 (D) PID调节器构成带阻滤波器 (E) PID调节器是带通滤波器 标准答案是:A,B,C 6. 单位负反馈系统的闭环传递函数为G(s)=9(0.2s+1)(0.5s+1)/[s2(0.1s+1)],则系统特性为_______.(5分) (A) 它是II型系统 (B) 闭环系统包含的典型环节有六个 (C) 闭环系统跟踪斜坡信号的稳态误差为零 (D) 闭环系统跟踪阶跃信号的稳态误差为零 1
初三数学期末测试题5套及标准答案模板
初三数学模拟试题1 (满分:100分,时间:100分钟) 一、填空题(每题2分,共24分) 1.计算:2-1+0)13(4 1 =_________. 2.函数y =2x /(x 2-4)中自变量取值范围是______________. 3.若x 2-xy-2y 2=0,且xy ≠0,则y x 的值是_________. 4.已知方程2x2-4x-1=0的两根为x 1、x 2,则以1/x 1、1/x 2为根的一元二次 方程是_________. 5.某问题的两个变量y 、x有如下关系:y=-x 3,并且x 的取值范围是1≤x ≤3,则变量y 的最大值是_________. 6.圆内接正十二边形中心角的度数等于_________. 7.如图△A BC 中,AD =1,DC =2,AB=4,点D 在AC 上,请你在A B上取点E ,且使△DEC 的面积等于△ABC 的面积的一半,则点E 到点B 的距离是_________. 8.如图,△ABC 中,A B>AC,过AC 上一点D 作直线DE,使△AD E和原三角形相似,这样的直线可作_________条. 9.若把矩形沿它的一个内角平分线折叠,把另一分成2 cm 和3 cm 两部分,则这个矩形的周长为_________cm. 10.扇形的圆心角是150°,半径是12 c m,这个扇形的面积是_________. 11.某二次函数y=ax 2+bx+c 的图象如图所示,则一次函数y=-acx +b的图象不经过_________象限.
12.若|x -2|+(y -3)2=0,则代数式:62++-x y x y 的值是_________. 二、选择题(每小题3分,共18分) 13.下列计算正确的是( ) A .a 3·a 2=a 6 B .552332=+ C .2x2-3xy 2=-xy 2 D.(-a)4/(-a)3=-a 14.若正比例函数y=k x(k>0)与反比例函数y=x 2的图象相交于A 、C 两点,过A 作x轴的垂线交x轴于B,连结BC ,若△ABC 的面积为S,则( ) A.S=1 B.S=2 C.S =3 D .S=4 15.Rt △ABC 中,∠C =90°,如果sinA=5 4,那么tanB 的值是( ) A .53 B.45 C.4 3 D .3 4 16.两圆半径相等,当这两个圆的位置关系变化时,它们的公切线的条数最小是( ) A.0 B.1 C .2 D.3 17.若太阳光线与地面成37°角,一棵树的影长为10米,则树高h的范围是(取3=1.7)( ) A.3
机械控制工程基础_习题集含答案
《机械控制工程基础》课程习题集 西南科技大学成人、网络教育学院 所有 习题 【说明】:本课程《机械控制工程基础》(编号为09010)共有单选题,计算题, 填空题等多种试题类型,其中,本习题集中有[ 填空题]等试题类型未进入。 一、单选题 1. t e 2-的拉氏变换为( )。 A. s 21; B. 15 .0+s ; C. 21+s ; D. 2 1s e 2- 2. )(t f 的拉氏变换为) 2(6 ][+= s s s F ,则)(t f 为( )。 A. t e 23-; B. t e 21--; C. )1(32t e --; D. t e 26- 3. 脉冲函数的拉氏变换为( )。 A. 0 ; B. ∞; C. 常数; D. 变量 4. ()t t f δ5)(=,则=)]([t f L ( )。 A. 5 ; B. 1 ; C. 0 ; D. s 5 5. 已知) 52)(2(3 3)(22+++++=s s s s s s s F ,其原函数的终值=∞→t t f )(( )。 A. ∞ ; B. 0 ; C. 0.6 ; D. 0.3
6. 已知) 45(3 2)(22++++=s s s s s s F ,其原函数的终值=∞→t t f )(( )。 A. 0 ; B. ∞ ; C. 0.75 ; D. 3 7. 已知s n e s a s F τ-= 2 )(其反变换f (t)为( )。 A. )(ττa t n a -?; B. )(τn t a -?; C. τn te a -?; D. )(1 τn t a -? 8. 已知) 1(1 )(+= s s s F ,其反变换f (t)为( )。 A. t e -1; B. t e -+1; C. t e --1; D. 1--t e 9. 已知t e t f t 2sin )(-=的拉氏变换为( )。 A. s e s 224 2-+ ; B. 4)4(22++s ; C. 4)1(2 ++s s ; D. s e s s 22 4 -+ 10. 图示函数的拉氏变换为( )。 a 0 τ t A. )1(12s e s a ττ--; B. )1(12s e s a ττ--; C. )1(1s e s a ττ--;D. )1(12 s e s a ττ- 11. 若)(∞f =0,则][s F 可能是以下( )。 A. 91-s ; B. 9 2+s s ; C. 91+s ; D. 9 1 2+s 12. 开环与闭环结合在一起的系统称为( )。 A.复合控制系统; B.开式控制系统; C.闭和控制系统; D.正反馈控制系统
机械控制工程基础实验指导书(07年)
中北大学 机械工程与自动化学院 实验指导书 课程名称:《机械工程控制基础》 课程代号:02020102 适用专业:机械设计制造及其自动化 实验时数:4学时 实验室:数字化实验室 实验内容:1.系统时间响应分析 2.系统频率特性分析 机械工程系 2010.12
实验一 系统时间响应分析 实验课时数:2学时 实验性质:设计性实验 实验室名称:数字化实验室 一、实验项目设计内容及要求 1.试验目的 本实验的内容牵涉到教材的第3、4、5章的内容。本实验的主要目的是通过试验,能够使学生进一步理解和掌握系统时间响应分析的相关知识,同时也了解频率响应的特点及系统稳定性的充要条件。 2.试验内容 完成一阶、二阶和三阶系统在单位脉冲和单位阶跃输入信号以及正弦信号作用下的响应,求取二阶系统的性能指标,记录试验结果并对此进行分析。 3.试验要求 学习教材《机械工程控制基础(第5版)》第2、3章有关MA TLAB 的相关内容,要求学生用MA TLAB 软件的相应功能,编程实现一阶、二阶和三阶系统在几种典型输入信号(包括单位脉冲信号、单位阶跃信号、单位斜坡信号和正弦信号)作用下的响应,记录结果并进行分析处理:对一阶和二阶系统,要求用试验结果来分析系统特征参数对系统时间响应的影响;对二阶系统和三阶系统的相同输入信号对应的响应进行比较,得出结论。 4.试验条件 利用机械工程与自动化学院数字化试验室的计算机,根据MA TLAB 软件的功能进行简单的编程来进行试验。 二、具体要求及实验过程 1.系统的传递函数及其MA TLAB 表达 (1)一阶系统 传递函数为:1 )(+= Ts K s G 传递函数的MA TLAB 表达: num=[k];den=[T,1];G(s)=tf(num,den) (2)二阶系统 传递函数为:2 2 2 2)(n n n w s w s w s G ++= ξ 传递函数的MA TLAB 表达: num=[2n w ];den=[1,ξ2wn ,wn^2];G(s)=tf(num,den) (3)任意的高阶系统 传递函数为:n n n n m m m m a s a s a s a b s b s b s b s G ++++++++= ----11 101110)( 传递函数的MA TLAB 表达: num=[m m b b b b ,,,110- ];den=[n n a a a a ,,,110- ];G(s)=tf(num,den)