2011年山东科技大学820机械原理考研试题
一、填空题(15分) 1、机构具有确定运动的条件是机构的原动件数目应等于机构的 的数目。
2、平面四杆机构的速度瞬心共有 个。
3、曲柄滑块机构若存在死点时,其原动件必须是 。
4、移动副自锁的条件是 。
5、刚性转子静平衡的力学条件是 ,动平衡的力学条件是 。
6、飞轮的作用主要用以调节机械的 速度波动。为了减小转动惯量,应将其安装在 轴上。
7、平面连杆机构处于死点位置时,其压力角为 ,传动角为
8、一对渐开线斜齿轮正确啮合的条件是 , , 。 9、常见的间歇运动机构有 、 等。
二、(15分)
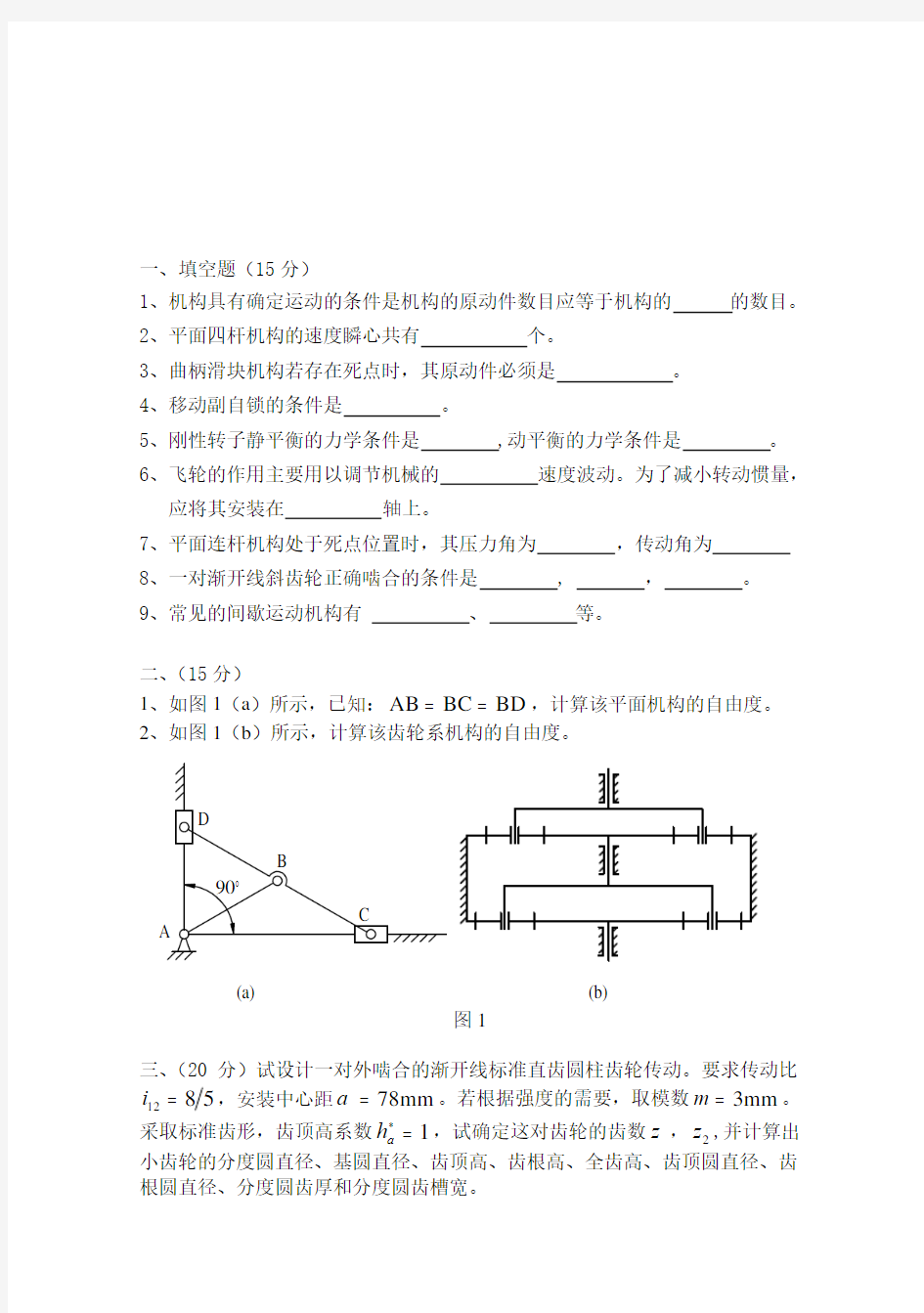
1、如图1(a )所示,已知:BD BC AB ==,计算该平面机构的自由度。
2、如图1(b
)所示,计算该齿轮系机构的自由度。
D
B
90?
C
A (a) (b)
图1
三、(20分)试设计一对外啮合的渐开线标准直齿圆柱齿轮传动。要求传动比5812=i ,安装中心距mm 78=a 1=*
a h 。若根据强度的需要,取模数。采取标准齿形,齿顶高系数,试确定这对齿轮的齿数,,并计算出小齿轮的分度圆直径、基圆直径、齿顶高、齿根高、全齿高、齿顶圆直径、齿根圆直径、分度圆齿厚和分度圆齿槽宽。 mm 3=m 2z z
四、(20分)如图2所示的曲柄摇块机构,已知mm 30=AB l , D 为构件2上的一点,曲柄以等角速度mm 100=AC l mm 40=BD l s rad 10=ω回转。试用矢量方程图解法求机构在位置时,D 点的速度和加速度。
45=??1 B ωD 2
C A 3
4
图2
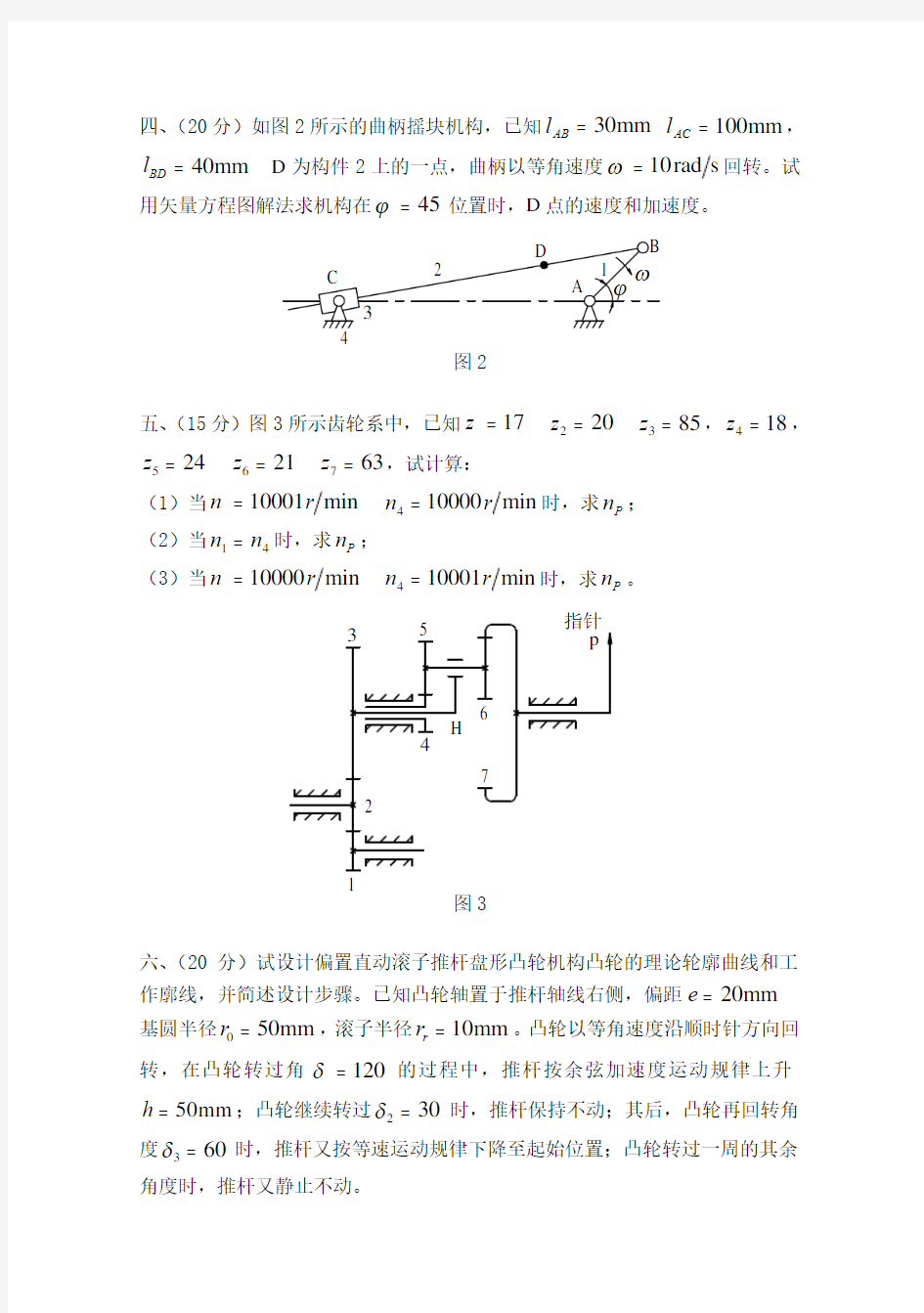
五、(15分)图3所示齿轮系中,已知17=z 202=z 853=z ,,184=z 245=z 216=z 637=z ,试计算: (1)当min 10001r n =min 100004r n =时,求;
P n (2)当时,求; 41n n =P n (3)当min 10000r n =min 100014r n =时,求。
P n p 指针5 3
6 H 4
7
2 1 图3
六、(20分)试设计偏置直动滚子推杆盘形凸轮机构凸轮的理论轮廓曲线和工作廓线,并简述设计步骤。已知凸轮轴置于推杆轴线右侧,偏距基圆半径,滚子半径。凸轮以等角速度沿顺时针方向回转,在凸轮转过角的过程中,推杆按余弦加速度运动规律上升;凸轮继续转过时,推杆保持不动;其后,凸轮再回转角度时,推杆又按等速运动规律下降至起始位置;凸轮转过一周的其余角度时,推杆又静止不动。
mm 20=e mm 500=r δmm 60mm 10=r r 30=120=2δ50=h 3=δ
七、(15分)设计一铰链四杆机构,已知其摇杆CD 的行程速比系数1=K ,摇杆的长度mm l CD 150=,摇杆的极限位置与机架所成的角度和,如图4所示。求曲柄的长度和连杆的长度。
30=?90=''?AB l BC l C 2
?'
A
D B
?''
C 图4
八、(15分)如图5所示的偏心夹具中,已知夹具中心高mm 100=H ,偏心盘外径,偏心距mm 120=D mm 15=e ,轴颈摩擦圆半径mm 5=ρ,摩擦系数。求所能夹持的工件2的最大厚度和最小厚度。 15.0=f max h min h F e ρO
A D F R23?H
3 B h
2
1
图5九、(15分)图6所示为一钢制圆盘,盘厚mm 50=b 。位置I 处有一直径mm 50=φ的通孔,位置II 处有一质量kg 5.02=m 的重块。为了使圆盘平衡,拟在圆盘上mm 200=r 处制一通孔,求孔的直径与位置。(钢的密度为33m kg 108.7?=ρ)
y
135?
210?
r=100m
I
x
m
r II=200mm
II
图6
哈工大机械原理考研-习题
1 例2-10 在例2-10图所示中,已知各构件的尺寸及机构的位置,各转动副处的摩擦圆如图中虚线圆,移动副及凸轮高副处的摩擦角为?,凸轮顺时针转动,作用在构件4上的工作阻力为Q 。试求该图示位置: 1. 各运动副的反力(各构件的重力和惯性力均忽略不计); 2. 需施加于凸轮1上的驱动力矩1M ; 3 . 机构在图示位置的机械效率η。 例2-10 解题要点: 考虑摩擦时进行机构力的分析,关键是确定运动副中总反力的方向。为了确定总反力的方向,应先分析各运动副元素之间的相对运动,并标出它们相对运动的方向;然后再进行各构件的受力分析,先从二力构件开始,在分析三力构件。 解:选取长度比例尺l μ(m/mm)作机构运动简图。 1. 确定各运动副中总反力的方向。如例2-10(a)图,根据机构的运动情况和力的平衡条件,先确定凸轮高副处的总反力12R 的方向,该力方向与接触点B 处的相对速度21B B v 的方向成090?+角。再由51R 应切于运动副A 处的摩擦圆,且对A 之矩的方向与1ω方向相反,同时与12R 组成一力偶与1M 平衡,由此定出51R 的方向;由于连杆3为二力构件,其在D ,E 两转动副受两力23R 及43R 应切于该两处摩擦圆,且大小相等方向相反并共线,可确定出23R 及43R 的作用线,也即已知32R 及34R 的方向线;总反力52R ,应切于运动副C 处的摩擦圆,且对C 之矩的方向应与25ω方向相反,同时构件2受到12R ,52R 及32R 三个力,且应汇交于一点,由此可确定出52R 的方向线;滑块4所受总反力54R 应与45v 的方向成090?+角,同时又受到34R ,54R 及Q 三个力,也应汇交于一点,由此可确定出54R 的方向线。 2. 求各运动副中总反力的大小。 分别取构件2,4为分离体,列出力平衡方程式 构件2 1232520R R R ++= 构件4 34540R R Q ++=
机械设计基础考试题库及答案汇总
一、 名词解释 1.机械: 2.机器: 3.机构: 4.构件: 5.零件: 6.标准件: 7.自由构件的自由度数: 8.约束: 9.运动副: 10.低副: 11.高副: 23.机构具有确定运动的条件: 24.死点位置: 25.急回性质: 26.间歇运动机构: 27.节点: 28.节圆: 29.分度圆: 30.正确啮合条件: 31.连续传动的条件: 32.根切现象: 33.变位齿轮: 34.蜗杆传动的主平面: 35.轮系: 36.定轴轮系: 37.周转轮系: 38.螺纹公称直径:螺纹大径。39.心轴: 40.传动轴: 41.转轴: 二、 填空题 1. 机械是(机器)和(机构)的总称。 2. 机构中各个构件相对于机架能够产生独立运动的数目称为(自由度)。 3. 平面机构的自由度计算公式为:(F=3n-2P L -P H )。 4. 已知一对啮合齿轮的转速分别为n 1、n 2,直径为D 1、D 2,齿数为z 1、z 2,则其传动比i= (n 1/n 2)= (D 2/D 1)= (z 2/ z 1)。 5. 铰链四杆机构的杆长为a=60mm ,b=200mm ,c=100mm ,d=90mm 。若以杆C为机架,则此四杆机构为(双摇杆机构)。 6. 在传递相同功率下,轴的转速越高,轴的转矩就(越小)。 7. 在铰链四杆机构中,与机架相连的杆称为(连架杆),其中作整周转动的杆称为(曲柄),作往复摆动的杆称为(摇杆),而不与机架相连的杆称为(连杆)。 8. 平面连杆机构的死点是指(从动件与连杆共线的)位置。 9. 平面连杆机构曲柄存在的条件是①(最短杆与最长杆长度之和小于或等于其它两杆长度之和)②(连架杆和机架中必有一杆是最短杆)。 10. 平面连杆机构的行程速比系数K=1.25是指(工作)与(回程)时间之比为(1.25),平均速比为(1:1.25)。 11. 凸轮机构的基圆是指(凸轮上最小半径)作的圆。 12. 凸轮机构主要由(凸轮)、(从动件)和(机架)三个基本构件组成。 13. 带工作时截面上产生的应力有(拉力产生的应力)、(离心拉应力)和(弯曲应力)。 14. 带传动工作时的最大应力出现在(紧边开始进入小带轮)处,其值为:σmax=σ1+σb1+σc 。 15. 普通V带的断面型号分为(Y 、Z 、A 、B 、C 、D 、E )七种,其中断面尺寸最小的是(Y )型。 16. 为保证齿轮传动恒定的传动比,两齿轮齿廓应满足(接触公法连心线交于一定点)。 17. 渐开线的形状取决于(基)圆。 18. 一对齿轮的正确啮合条件为:(m 1 = m 2)与(α 1 = α2)。 19. 一对齿轮连续传动的条件为:(重合度1>ε)。 20. 齿轮轮齿的失效形式有(齿面点蚀)、(胶合)、(磨损)、(塑 性变形)和(轮齿折断)。 21. 一对斜齿轮的正确啮合条件为:(m 1 = m 2)、(α 1 = α2) 与(β1=-β2)。 22. 蜗杆传动是由(蜗杆、蜗轮)和(机架)组成。 23. 通过蜗杆轴线并垂直蜗轮轴线的平面称为(中间平面)。 24. 常用的轴系支承方式有(向心)支承和(推力)支承。 25. 轴承6308,其代号表示的意义为(6:深沟球轴承、3:直 径代号,08:内径为Φ40)。 26. 润滑剂有(润滑油)、(润滑脂)和(气体润滑剂)三类。 27. 列举出两种固定式刚性联轴器(套筒联轴器)、(凸缘联轴 器)。 28. 轴按所受载荷的性质分类,自行车前轴是(心轴)。 29. 普通三角螺纹的牙形角为(60)度。 30. 常用联接螺纹的旋向为(右)旋。 31. 普通螺栓的公称直径为螺纹(大)径。 32. 在常用的螺纹牙型中(矩形)形螺纹传动效率最高,(三角) 形螺纹自锁性最好。 33. 减速器常用在(原动机)与(工作机)之间,以降低传速 或增大转距。 34. 两级圆柱齿轮减速器有(展开式)、(同轴式)与(分流式)三种配置齿轮的形式。 35. 轴承可分为(滚动轴承)与(滑动轴承)两大类。 36. 轴承支承结构的基本形式有(双固式)、(双游式)与(固游式)三种。 37. 轮系可分为(平面轮系)与(空间轮系)两类。 38. 平面连杆机构基本形式有(曲柄摇杆机构)、(双曲柄机构)与(双摇杆机构)三种。 39. 凸轮机构按凸轮的形状可分为(盘形凸轮)、(圆柱凸轮) 与(移动凸轮)三种。 40. 凸轮机构按从动件的形式可分为(尖顶)、(滚子)与(平底)三种。 41. 变位齿轮有(正变位)与(负变位)两种;变位传动有(等移距变位)与(不等移距变位)两种。 42. 按接触情况,运动副可分为(高副)与(低副) 。 43. 轴上与轴承配合部分称为(轴颈);与零件轮毂配合部分称为(轴头);轴肩与轴线的位置关系为(垂直)。 44. 螺纹的作用可分为(连接螺纹)和(传动螺纹) 两类。 45. 轮系可分为 (定轴轮系)与(周转轮系)两类。 46. 常用步进运动机构有(主动连续、从动步进)与(主动步进、从动连续)两种。 47. 构件是机械的(运动) 单元;零件是机械的 (制造) 单元。 48. V 带的结构形式有(单楔带)与(多楔带)两种。 三、 判断题 1. 一个固定铰链支座,可约束构件的两个自由度。× 2. 一个高副可约束构件的两个自由度。× 3. 在计算机构自由度时,可不考虑虚约束。× 4. 销联接在受到剪切的同时还要受到挤压。√ 5. 两个构件之间为面接触形成的运动副,称为低副。√ 6. 局部自由度是与机构运动无关的自由度。√ 7. 虚约束是在机构中存在的多余约束,计算机构自由度时应除去。√ 8. 在四杆机构中,曲柄是最短的连架杆。× 9. 压力角越大对传动越有利。× 10. 在曲柄摇杆机构中,空回行程比工作行程的速度要慢。× 11. 偏心轮机构是由曲柄摇杆机构演化而来的。√ 12. 曲柄滑块机构是由曲柄摇杆机构演化而来的。√ 13. 减速传动的传动比i <1。× 14. Y型V带所能传递的功率最大。× 15. 在V带传动中,其他条件不变,则中心距越大,承载能力越大。× 16. 带传动一般用于传动的高速级。× 17. 带传动的小轮包角越大,承载能力越大。√ 18. 选择带轮直径时,直径越小越好。× 19. 渐开线上各点的压力角不同,基圆上的压力角最大。× 20. 基圆直径越大渐开线越平直。√ 21. 设计蜗杆传动时,为了提高传动效率,可以增加蜗杆的头数。 √ 22. 在润滑良好的闭式齿轮传动中,齿面疲劳点蚀失效不会发生。 × 23. 只承受弯矩而不受扭矩的轴,称为心轴。√ 24. 螺钉联接用于被联接件为盲孔,且不经常拆卸的场合。√ 25. 挤压就是压缩。 × 26. 受弯矩的杆件,弯矩最大处最危险。× 27. 仅传递扭矩的轴是转轴。√ 28. 低速重载下工作的滑动轴承应选用粘度较高的润滑油。√ 29. 代号为6310的滚动轴承是角接触球轴承。×
机械设计基础试题试题库及答案
机械设计基础试题库及答案 一、判断(每题一分) 1、一部机器可以只含有一个机构,也可以由数个机构组成。……(√ 2、机器的传动部分是完成机器预定的动作,通常处于整个传动的终端。(×) 4、机构是具有确定相对运动的构件组合。………………………………(√) 5、构件可以由一个零件组成,也可以由几个零件组成。………………(√) 6、整体式连杆是最小的制造单元,所以它是零件而不是构件。……(×) 7、连杆是一个构件,也是一个零件。………………………(√) 8、减速器中的轴、齿轮、箱体都是通用零件。……………………………(×) 二、选择(每题一分) 1、组成机器的运动单元体是什么?( B ) A.机构B.构件C.部件D.零件 2、机器与机构的本质区别是什么?( A ) A.是否能完成有用的机械功或转换机械能B.是否由许多构件组合而成C.各构件间能否产生相对运动D.两者没有区 3、下列哪一点是构件概念的正确表述?( D ) A.构件是机器零件组合而成的。B.构件是机器的装配单元 C.构件是机器的制造单元D.构件是机器的运动单元 4、下列实物中,哪一种属于专用零件?( B ) A.钉B.起重吊钩C.螺母D.键
5、以下不属于机器的工作部分的是( D ) A.数控机床的刀架B.工业机器人的手臂 C.汽车的轮子D.空气压缩机 三、填空(每空一分) 1、根据功能,一台完整的机器是由(动力系统)、(执行系统)、(传动系统)、(操作控制系统)四部分组成的。车床上的主轴属于(执行)部分。 2、机械中不可拆卸的基本单元称为(零件),它是(制造)的单元体 3、机械中制造的单元称为(零件),运动的单元称为(构件),装配的单元称为(机构)。 4、从(运动)观点看,机器和机构并无区别,工程上统称为(机械)。 5.机器或机构各部分之间应具有_相对__运动。机器工作时,都能完成有用的__机械功___或实现转换__能量___。 2 平面机构 一、填空题(每空一分) 2.两构件之间以线接触所组成的平面运动副,称为高副,它产生 1 个约束,而保留 2 个自由度。 3.机构具有确定的相对运动条件是原动件数等于机构的自由度。 4.在平面机构中若引入一个高副将引入___1__个约束,而引入一个低副将引入_2___个约束,构件数、约束数与机构自由度的关系是F=3n-2Pl-Ph 。
2002-2016年中国矿业大学808机械原理考研真题及答案解析 汇编
2017版中国矿业大学《808机械原理》全套考研资料 我们是布丁考研网中国矿大考研团队,是在读学长。我们亲身经历过中国矿大考研,录取后把自己当年考研时用过的资料重新整理,从本校的研招办拿到了最新的真题,同时新添加很多高参考价值的内部复习资料,保证资料的真实性,希望能帮助大家成功考入中国矿大。此外,我们还提供学长一对一个性化辅导服务,适合二战、在职、基础或本科不好的同学,可在短时间内快速把握重点和考点。有任何考中国矿大相关的疑问,也可以咨询我们,学长会提供免费的解答。更多信息,请关注布丁考研网。 以下为本科目的资料清单(有实物图及预览,货真价实): 中国矿业大学《机械原理》全套考研资料 一、中国矿业大学《机械原理》历年考研真题及答案解析 2016年中国矿业大学《机械原理》考研真题(含答案解析)(11月份统一更新)2015年中国矿业大学《机械原理》考研真题(含答案解析) 2014年中国矿业大学《机械原理》考研真题(含答案解析) 2013年中国矿业大学《机械原理》考研真题(含答案解析) 2012年中国矿业大学《机械原理》考研真题(含答案解析) 2011年中国矿业大学《机械原理》考研真题(含答案解析) 2010年中国矿业大学《机械原理》考研真题(含答案解析) 2009年中国矿业大学《机械原理》考研真题(含答案解析) 2008年中国矿业大学《机械原理》考研真题(含答案解析) 2007年中国矿业大学《机械原理》考研真题(含答案解析) 2006年中国矿业大学《机械原理》考研真题(含答案解析) 2005年中国矿业大学《机械原理》考研真题(含答案解析) 2004年中国矿业大学《机械原理》考研真题(含答案解析) 2003年中国矿业大学《机械原理》考研真题(含答案解析) 2002年中国矿业大学《机械原理》考研真题(含答案解析) 二、中国矿业大学《机械原理》期中期末试卷及答案 三、中国矿业大学《机械原理》笔记 1、中国矿业大学《机械原理》复习要点 2、中国矿业大学《机械原理》本科生课件 3、中国矿业大学《机械原理》参考书目、考试大纲、适用专业 四、中国矿业大学《机械原理》习题集 1、中国矿业大学《机械原理》近十年考研真题题型及要点分析 五、赠送(电子版,邮箱发送) 1、机械原理复习经验及流程 2、中国矿业大学机电学院2011-2016年报录比 3、中国矿业大学机电学院2012-2016年复试分数线 4、中国矿业大学机电学院硕士生导师简介及联系方式 以下为截图预览: 2015年真题答案
西安交通大学《机械设计基础》考研题库
西安交通大学《机械设计基础》考研题库 1.填空题: 概论 机构组成及自由度 连杆机构 凸轮机构 轮系 间歇机构 平衡与调速 带传动 链传动 齿轮传动 蜗杆涡轮传动 轴 滚动轴承 滑动轴承 联轴器 螺纹连接及螺旋传动 键连接 2.简答题: 3.计算分析题
一.填空题: 1.机械设计课程主要讨论通用机械零件和部件的设计计算理论和方法。 2.机械零件设计应遵循的基本准则:强度准则、刚度准则、耐磨性准则、震动稳定性准则。 3.强度:零件抵抗破裂(表面疲劳、压溃、整体断裂)及塑性变形的能力。 1.所谓机架是指机构中作为描述其他构件运动的参考坐标系的构件。 2.机构是机器中的用以传递与转换运动的单元体;构件是组成机构的运动单元;零件组成机械的制造单元。 3.两构件组成运动副必须具备的条件是两构件直接接触并保持一定的相对运动。 4.组成转动副的两个运动副元素的基本特征是圆柱面。 5.两构件通过面接触而形成的运动副称为低副,它引入2个约束,通过点线接触而构成的运动副称为高副,它引入1个约束。 6.机构的自由度数等于原动件数是机构具有确定运动的条件。 7.在机构运动简图上必须反映与机构运动情况有关的尺寸要素。因此,应该正确标出运动副的中心距,移动副导路的方向,高副的轮廓形状。 1.铰链四杆机构若最短杆与最长杆长度之和小于等于其余两杆长度之和则可能存在曲柄。其中若最短杆是连架杆,则为曲柄摇杆机构;若最短杆是连杆,则为双摇杆机构;若最短杆是机架,则为双曲柄机构;若最短杆与最长杆长度之和大于其余两杆长度之和则不存在曲柄(任何情况下均为双摇杆机构) 2.最简单的平面连杆机构是两杆机构。 3.为保证连杆机构传力性能良好,设计时应使最小传动角γmin≥[γ] 4.机构在死点位置时的传动角γ=0°. 5.平面连杆机构中,从动件压力角α与机构传动角γ之间的关系是α+γ=90°. 6.曲柄摇杆机构中,必然出现死点位置的原动件是摇杆。 7.曲柄滑块机构共有6个瞬心。
(精选)考研机械原理复习试题(含答案)总结
考研机械原理复习试题(含答案)1 一、填空题: 1.机构具有确定运动的条件是机构的自由度数等于。 2.同一构件上各点的速度多边形必于对应点位置组成的多边形。 3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。 4.机械系统的等效力学模型是具有,其上作用有的等效构件。 5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。 6.平面连杆机构中,同一位置的传动角与压力角之和等于。 7.一个曲柄摇杆机构,极位夹角等于36o,则行程速比系数等于。 8.为减小凸轮机构的压力角,应该凸轮的基圆半径。 9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程 作运动。 10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。 11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。 12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。 13.三个彼此作平面运动的构件共有个速度瞬心,且位于。 14.铰链四杆机构中传动角γ为,传动效率最大。 15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。 16.偏心轮机构是通过由铰链四杆机构演化而来的。 17.机械发生自锁时,其机械效率。 18.刚性转子的动平衡的条件是。 19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。 20.具有急回特性的曲杆摇杆机构行程速比系数k 1。 21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。 22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。 23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。 24.差动轮系是机构自由度等于的周转轮系。 25.平面低副具有个约束,个自由度。 26.两构件组成移动副,则它们的瞬心位置在。
最新机械设计基础考试题库及答案
本文从网络收集而来,上传到平台为了帮 到更多的人,如果您需要使用本文档,请 点击下载,另外祝您生活愉快,工作顺利, 万事如意! 最新机械设计基础考试题库及答案 一、填空题 1.机械是(机器)和(机构)的总称。 2.机构中各个构件相对于机架能够产生 独立运动的数目称为(自由度)。 3.平面机构的自由度计算公式为: (F=3n-2P L-P H)。 4.已知一对啮合齿轮的转速分别为n1、 n2,直径为D1、D2,齿数为z1、z2,则其传 动比i= (n1/n2)= (D2/D1)= (z2/ z1)。 5.铰链四杆机构的杆长为a=60mm, b=200mm,c=100mm,d=90mm。若以杆C为 机架,则此四杆机构为(双摇杆机构)。 6.在传递相同功率下,轴的转速越高, 轴的转矩就(越小)。 7.在铰链四杆机构中,与机架相连的杆 称为(连架杆),其中作整周转动的杆称 为(曲柄),作往复摆动的杆称为(摇杆), 而不与机架相连的杆称为(连杆)。
8.平面连杆机构的死点是指(从动件与连杆共线的)位置。 9.平面连杆机构曲柄存在的条件是①(最短杆与最长杆长度之和小于或等于其它两杆长度之和)②(连架杆和机架中必有一杆是最短杆)。 10.平面连杆机构的行程速比系数K=1.25是指(工作)与(回程)时间之比为(1.25),平均速比为(1:1.25)。11.凸轮机构的基圆是指(凸轮上最小半径)作的圆。 12.凸轮机构主要由(凸轮)、(从动件)和(机架)三个基本构件组成。 13.带工作时截面上产生的应力有(拉力产生的应力)、(离心拉应力)和(弯曲应力)。 14.带传动工作时的最大应力出现在(紧边开始进入小带轮)处,其值为:σmax=σ1+σb1+σc。 15.普通V带的断面型号分为(Y、Z、A、 B、C、D、E)七种,其中断面尺寸最小的是(Y)型。 16.为保证齿轮传动恒定的传动比,两齿轮齿廓应满足(接触公法连心线交于一定点)。 17.渐开线的形状取决于(基)圆。 18.一对齿轮的正确啮合条件为:(m1= m2)与(α 1 = α2)。 19.一对齿轮连续传动的条件为:(重合度1 > ε)。 20.齿轮轮齿的失效形式有(齿面点蚀)、(胶合)、(磨损)、(塑性变形)和(轮齿折断)。 21.一对斜齿轮的正确啮合条件为:(m1= m2)、(α 1 = α2)与(β1=-β2)。 22.蜗杆传动是由(蜗杆、蜗轮)和(机架)组成。 23.通过蜗杆轴线并垂直蜗轮轴线的平面称为(中间平面)。24.常用的轴系支承方式有(向心)支承和(推力)支承。 25.轴承6308,其代号表示的意义为(6:深沟球轴承、3:直径代号,08:内径为Φ40)。 26.润滑剂有(润滑油)、(润滑脂)和(气体润滑剂)三类。 27.列举出两种固定式刚性联轴器(套筒联轴器)、(凸缘联轴器)。 28.轴按所受载荷的性质分类,自行车前轴是(心轴)。 29.普通三角螺纹的牙形角为(60)度。 30.常用联接螺纹的旋向为(右)旋。 31.普通螺栓的公称直径为螺纹(大)径。 32.在常用的螺纹牙型中(矩形)形螺纹传动效率最高,(三角)形螺纹自锁性最好。 33.减速器常用在(原动机)与(工作机)之间,以降低传速或增大转距。 34.两级圆柱齿轮减速器有(展开式)、(同轴式)与(分流式)三种配置齿轮的形式。 35.轴承可分为(滚动轴承)与(滑动轴承)两大类。 36.轴承支承结构的基本形式有(双固式)、(双游式)与(固游式)三种。 37.轮系可分为(平面轮系)与(空间轮系)两类。 38.平面连杆机构基本形式有(曲柄摇杆机构)、(双曲柄机构)与(双摇杆机构)三种。 39.凸轮机构按凸轮的形状可分为(盘形凸轮)、(圆柱凸轮)与(移动凸轮)三种。 40.凸轮机构按从动件的形式可分为(尖顶)、(滚子)与(平底)三种。 41.变位齿轮有(正变位)与(负变位)两种;变位传动有(等移距变位)与(不等移距变位)两种。 42.按接触情况,运动副可分为(高副)
机械原理考研真题(A卷)
姓名 : 报考专业: 准考证号码: 密封线内不要写题 2014年攻读硕士学位研究生入学考试试题 科目名称:机械原理(■A 卷□B 卷)科目代码:819 考试时间:3小时 满分 150 分 可使用的常用工具:□无 √计算器 √直尺 √圆规(请在使用工具前打√) 注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;考完后试题随答题纸交回。 一、单项选择题(本大题10小题,每题2分,共20分,错选、多选均无分) 1.对于机构,下面说法错误的是_____。 A. 由一系列人为的运动单元组成 B. 各单元之间有确定的相对运动 C. 是由构件组成的系统 D. 可以完成机械功或机械能转换 2.平面连杆机构中,同一位置的传动角与压力角的关系为_____。 A .互余 B .互补 C .相等 D .没关系 3.一对齿轮啮合过程中,下面关于节圆的说法错误的是 。 A .始终相切 B .始终通过节点 C .始终和分度圆重合 D .随中心距增大而增大 4.生产工艺要求某机构将输入的匀速单向运动,转变为按照正玄规律变化的移动输出,一种可供选择的机构是 。 A .齿轮齿条机构 B.直动滚子从动件盘形凸轮机构 C.偏置曲柄滑块机构 D.摆动导杆机构 5.图1示转动副在驱动力矩M d 的作用下等速转动,Q 为径向载荷,ρ为摩擦圆半径,则运动副全反力R 21应是图中 所示作用线。 图1 M d Q A B C D R 21 ρ 1 2
p n p p = .一对平行轴斜齿轮传动,其传动比 。 21v v z z B .ω1a r D .
)判断在用齿条型刀具加工这 0.013779 0.014904 0.016092 0.017345 0.018665 0.020054
机械原理考研真题
姓名: 报考专业: 准考证号码: 密封线内不要写题 2014年攻读硕士学位研究生入学考试试题 科目名称:机械原理(■A 卷□B 卷)科目代码:819 考试时间:3小时 满分 150 分 可使用的常用工具:□无 √计算器 √直尺 √圆规(请在使用工具前打√) 注意:所有答题内容必须写在答题纸上,写在试题或草稿纸上的一律无效;考完后试题随答题纸交回。 一、单项选择题(本大题10小题,每题2分,共20分,错选、多选均无分) 1.对于机构,下面说法错误的是_____。 A. 由一系列人为的运动单元组成 B. 各单元之间有确定的相对运动 C. 是由构件组成的系统 D. 可以完成机械功或机械能转换 2.平面连杆机构中,同一位置的传动角与压力角的关系为_____。 A .互余 B .互补 C .相等 D .没关系 3.一对齿轮啮合过程中,下面关于节圆的说法错误的是 。 A .始终相切 B .始终通过节点 C .始终和分度圆重合 D .随中心距增大而增大 4.生产工艺要求某机构将输入的匀速单向运动,转变为按照正玄规律变化的移动输出,一种可供选择的机构是 。 A .齿轮齿条机构 B.直动滚子从动件盘形凸轮机构 C.偏置曲柄滑块机构 D.摆动导杆机构 5.图1示转动副在驱动力矩M d 的作用下等速转动,Q 为径向载荷,为摩擦圆半径,则运动副全反力R 21应是图中 所示作用线。 图1 M d Q A B C D R 21 1 2
6.渐开线直齿圆柱齿轮中,齿距p ,法向齿距n p ,基圆齿距b p 三者之间的关系为: 。 A .b n p p p =p B .b n p p p p p C.b n p p p f f D .b n p p p =f 7.一对平行轴斜齿轮传动,其传动比12i 等于 。 A .21v v z z B .21ωω C .21a a r r D .21f f r r 8.在蜗杆传动中,引入特性系数q 的目的是 。 A .便于蜗杆尺寸参数的计算 B .容易实现蜗杆传动中心距的标准化 C .提高蜗杆传动的 D .减少蜗轮滚刀的数量,有利于刀具的标准化 9.平衡的目的在于确定 。 A.不平衡质量的大小和方位 B.不平衡质径积 C.不平衡偏心距 D.转子的质心 10.在机器稳定运转的一个运动循环中,应有 A.惯性力和重力所作的功均为零 B.惯性力所做之功为零,重力所做之功不为零 C.惯性力和重力所做之功均不为零 D.惯性力所做之功不为零,重力所做之功为零 二、判断题(本大题10小题,每题2分,共20分。正确的打√,错误的打。) 1、机构的级别是由机构中包含最多的杆组的级别决定的。 ( ) 2、四杆铰链机构中最短杆与最长杆之和<(或=)其它两杆之和时,一定有曲柄。( ) 3、为减小直动尖顶从动件盘状凸轮机构压力角,凸轮的偏心距与推程时凸轮、推杆间的相对瞬心应位于凸轮转轴的异侧。 ( ) 4、 组成正传动的齿轮应该是正变位齿轮。 ( ) 5、直动平底从动件盘状凸轮机构压力角,与凸轮机构的基圆半径无关。 ( ) 6、两直齿圆柱齿轮的齿数和模数各不相等时,其渐开线的形状不一定不一样。( ) 7、直齿圆柱齿轮传动中节圆与分度圆总是重合的。 ( ) 8、理论上讲,可采用飞轮把周期性速度波动的机器的速度调节为匀速运动。 ( ) 9、 斜齿轮的当量齿数大于实际齿轮的齿数。 ( ) 10、静平衡的刚性转子不一定是动平衡的,但是动平衡的刚性转子一定是静平衡的 。
机械设计基础—考试题库及答案
机械设计基础 单选 锥齿轮传动用于传递两相交轴之间的运动和动力。 收藏 错误 正确 回答错误!正确答案: A 直齿圆柱齿轮减速器,当载荷平稳、转速较高时,应选用_____轴承收藏 A. 深沟球 B. 角接触球 C. 推力球 回答错误!正确答案: A 带传动正常工作时不能保证准确的传动比是因为 收藏 A. 带在带轮上打滑 B. 带的材料不符合胡克定律 C. 带容易变形和磨损 D. 带的弹性滑动 回答错误!正确答案: D 常用来传递空间两交错轴运动的齿轮机构是 收藏 A. 直齿圆锥齿轮 B. 蜗轮蜗杆 C. 直齿圆柱齿轮 D. 斜齿圆锥齿轮 回答错误!正确答案: B 不属于非接触式密封。
收藏 A. 曲路密封 B. 间隙密封 C. 毛毡圈密封 D. 挡油环密封 回答错误!正确答案: C 下列4种类型的联轴器中,能补偿两轴的相对位移以及缓和冲击、吸收振动的是。 收藏 A. 弹性柱销联轴器 B. 齿式联轴器 C. 万向联轴器 D. 凸缘联轴器 回答错误!正确答案: A 不均匀系数δ对机械速度的影响是_____。 收藏 A. δ与机械速度的波动无关 B. δ越小,机械速度的波动越小 C. δ越小,机械速度的波动越大 回答错误!正确答案: B 需要进行静平衡的回转件,不论有几个不平衡质量,都必须加上_____校正质量才能平衡。 收藏 A. 2个 B. 有几个不平衡质量,就要加几个校正质量 C. 1个 回答错误!正确答案: C
在平面机构中,每增加一个高副将引入 收藏 A. 2个约束 B. 3个约束 C. 1个约束 D. 0个约束 回答错误!正确答案: C 在链传动中,链速的不均匀性主要取决于 收藏 A. 主动链轮齿数 B. 链的节距 C. 从动链轮齿数 D. 链的长度 回答错误!正确答案: B 对于圆柱螺旋压缩弹簧,在轴向载荷F2 的作用下,弹簧丝将产生_____的变形。 收藏 A. .剪切与扭转组合变形 B. 压缩与扭转组合变形 C. 侧向弯曲 回答错误!正确答案: A 生产实践中,一般电动机与减速器的高速级的连接常选用_____类型的联轴器。 收藏 A. 弹性套柱销联轴器 B. 十字滑块联轴器 C. 凸缘联轴器 回答错误!正确答案: A
武汉理工 机械原理考研试题及答案
武汉理工大学考研教育课程考试复习题及参考答案 机械原理 一、填空题: 1.机构具有确定运动的条件是机构的自由度数等于。 2.同一构件上各点的速度多边形必于对应点位置组成的多边形。 3.在转子平衡问题中,偏心质量产生的惯性力可以用相对地表示。 4.机械系统的等效力学模型是具有,其上作用有的等效构件。 5.无急回运动的曲柄摇杆机构,极位夹角等于,行程速比系数等于。 6.平面连杆机构中,同一位置的传动角与压力角之和等于。 7.一个曲柄摇杆机构,极位夹角等于36o,则行程速比系数等于。 8.为减小凸轮机构的压力角,应该凸轮的基圆半径。 9.凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程 作运动。 10.增大模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。 11.平行轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。 12.轮系运转时,如果各齿轮轴线的位置相对于机架都不改变,这种轮系是轮系。 13.三个彼此作平面运动的构件共有个速度瞬心,且位于。 14.铰链四杆机构中传动角γ为,传动效率最大。 15.连杆是不直接和相联的构件;平面连杆机构中的运动副均为。 16.偏心轮机构是通过由铰链四杆机构演化而来的。 17.机械发生自锁时,其机械效率。 18.刚性转子的动平衡的条件是。 19.曲柄摇杆机构中的最小传动角出现在与两次共线的位置时。 20.具有急回特性的曲杆摇杆机构行程速比系数k 1。 21.四杆机构的压力角和传动角互为,压力角越大,其传力性能越。 22.一个齿数为Z,分度圆螺旋角为β的斜齿圆柱齿轮,其当量齿数为。 23.设计蜗杆传动时蜗杆的分度圆直径必须取值,且与其相匹配。 24.差动轮系是机构自由度等于的周转轮系。 25.平面低副具有个约束,个自由度。
2017年山东科技大学研究生入学考试211翻译硕士英语考研真题
Part I Reading Comprehension(2*2.5=50 points) Derections: There are five passages in this section.Each passage is followed by some questions or unfinished statemens. For each of them, there are four choices marked A, B, C and D. Decide on the best choice. Passage 1 What might driving on an automated highway be like? The answer depends on what kind of system is ultimately adopted. Two distinct types are on the drawing board. The first is a special-purpose lane system, in which certain lanes are reserved for automated vehicles. The second is a mixed traffic system: fully automated vehicles would share the road with partially automated or manually driven cars. A special-purpose land system would require more extensive physical modifications to existing highways, but it promises the greatest gains in freeway capacity. Under either scheme, the driver would specify the desired destination, furnishing this information to a computer in the car at the beginning of the trip or perhaps just before reaching the automated highway. If a mixed traffic system was in place, automated driving could begin whenever the driver was on suitably equipped roads. If special-purpose lanes were available, the car could enter them and join existing traffic in two different ways. One method would use a special onramp. As the driver approached the point of entry for the highway, devices installed on the roadside would electronically check the vehicle to determine its destination and to ascertain that it had the proper automation equipment in good working order. Assuming it passed such tests, the driver would then be guided through a gate and toward an automated lane. In this case, the transition from manual to automated control would take place on the entrance ramp. An alternative technique could employ conventional lanes, which would be shared by automated and regular vehicles. The driver would steer onto the highway and move in normal fashion to a “transition” lane. The vehicle would then shift under computer control onto a lane reserved for automated traffic. (The limitation of these lanes to automated traffic would presumably be well respected, because all trespassers could be swiftly identified by authorities.) Either approach to joining a lane of automated traffic would
机械设计基础考试题库及答案
《机械设计基础》考试题库 一、 填空题 1. 机械是(机器)和(机构)的总称。 2. 机构中各个构件相对于机架能够产生独立运动的数目称为(自由度)。 3. 平面机构的自由度计算公式为:(F=3n-2P L -P H )。 4. 已知一对啮合齿轮的转速分别为n 1、n 2,直径为D 1、D 2,齿数为z 1、z 2,则其传动比i= (n 1/n 2)= (D 2/D 1)= (z 2/ z 1)。 5. 在传递相同功率下,轴的转速越高,轴的转矩就(越小)。 6. 在铰链四杆机构中,与机架相连的杆称为(连架杆),其中作整周转动的杆称为(曲柄),作往复摆动的杆称为(摇杆),而不与机架相连的杆称为(连杆)。 7. 平面连杆机构的死点是指(从动件与连杆共线的)位置。 8. 平面连杆机构曲柄存在的条件是①(最短杆与最长杆长度之和小于或等于其它两杆长度之和)②(连架杆和机架中必有一杆是最短杆)。 9. 凸轮机构主要由(凸轮)、(从动件)和(机架)三个基本构件组成。 10. 带工作时截面上产生的应力有(拉力产生的应力)、(离心拉应力)和(弯曲应力)。 11. 带传动工作时的最大应力出现在(紧边开始进入小带轮)处,其值为:σmax=σ1+σb1+σc 。 12. 渐开线的形状取决于(基)圆。 13. 一对齿轮的正确啮合条件为:(m 1 = m 2)与(α 1 = α2)。 14. 一对齿轮连续传动的条件为:(重合度1>ε)。 15. 齿轮轮齿的失效形式有(齿面点蚀)、(胶合)、(磨损)、 (塑性变形)和(轮齿折断)。 16. 蜗杆传动是由(蜗杆、蜗轮)和(机架)组成。 17. 常用的轴系支承方式有(向心)支承和(推力)支承。 18. 轴承6308,其代号表示的意义为(6:深沟球轴承、3:直 径代号,08:内径为Φ40)。 19. 润滑剂有(润滑油)、(润滑脂)和(气体润滑剂)三类。 20. 轴按所受载荷的性质分类,自行车前轴是(心轴)。 21. 在常用的螺纹牙型中(矩形)形螺纹传动效率最高,(三角) 形螺纹自锁性最好。 22. 轴承可分为(滚动轴承)与(滑动轴承)两大类。 23. 轴承支承结构的基本形式有(双固式)、(双游式)与(固 游式)三种。 24. 平面连杆机构基本形式有(曲柄摇杆机构)、(双曲柄机构) 与(双摇杆机构)三种。 25. 按接触情况,运动副可分为(高副)与(低副) 。 26. 轴上与轴承配合部分称为(轴颈);与零件轮毂配合部分 称为(轴头);轴肩与轴线的位置关系为(垂直)。 27. 螺纹的作用可分为(连接螺纹)和(传动螺纹) 两类。 28. 轮系可分为 (定轴轮系)与(周转轮系)两类。 29. 构件是机械的(运动) 单元;零件是机械的 (制造) 单 元。 二、 判断题 1. 一个固定铰链支座,可约束构件的两个自由度。× 2. 一个高副可约束构件的两个自由度。× 3. 在计算机构自由度时,可不考虑虚约束。× 4. 销联接在受到剪切的同时还要受到挤压。√ 5. 两个构件之间为面接触形成的运动副,称为低副。√ 6. 局部自由度是与机构运动无关的自由度。√ 7. 虚约束是在机构中存在的多余约束,计算机构自由度时应除 去。√ 8. 在四杆机构中,曲柄是最短的连架杆。× 9. 压力角越大对传动越有利。× 10. 在曲柄摇杆机构中,空回行程比工作行程的速度要慢。× 11. 减速传动的传动比i <1。× 12. 在V带传动中,其他条件不变,则中心距越大,承载能力越 大。× 13. 带传动一般用于传动的高速级。× 14. 带传动的小轮包角越大,承载能力越大。√ 15. 选择带轮直径时,直径越小越好。× 16. 渐开线上各点的压力角不同,基圆上的压力角最大。× 17. 基圆直径越大渐开线越平直。√ 18. 在润滑良好的闭式齿轮传动中,齿面疲劳点蚀失效不会发生。 × 19. 只承受弯矩而不受扭矩的轴,称为心轴。√ 20. 螺钉联接用于被联接件为盲孔,且不经常拆卸的场合。√ 21. 受弯矩的杆件,弯矩最大处最危险。× 22. 仅传递扭矩的轴是转轴。√ 23. 用联轴器时无需拆卸就能使两轴分离。× 24. 用离合器时无需拆卸就能使两轴分离。 √ 三、 简答题: 1. 机器与机构的主要区别是什么? 2. 构件与零件的主要区别是什么? 3. 蜗杆传动的正确啮合条件是什么? 4. 如何判断四杆机构是否有急回性质?极位夹角θ与急回性质有何关系? 5. 何谓带传动的弹性滑动和打滑?能否避免? 6. 一对相啮合齿轮的正确啮合条件是什么? 7. 一对相啮合齿轮的连续传动条件是什么? 8. 齿轮为什么会发生根切现象? 9. 何谓定轴轮系,何谓周转轮系? 10. 为什么大多数螺纹联接必须防松?防松措施有哪些? 11. 机器有哪些特征?机构与机器的区别何在? 五、单项选择题: 1. (B )是构成机械的最小单元,也是制造机械时的最小单元。 A. 机器;B.零件;C.构件;D.机构。 2. 两个构件之间以线或点接触形成的运动副,称为(B )。 A. 低副;B.高副;C. 移动副;D. 转动副。 3. 一端为固定铰支座,另一端为活动铰支座的梁,称为(B )。 A. 双支梁;B.外伸梁;C. 悬臂梁。 4. 一端为固定端,另一端为自由的梁,称为(C )。 A. 双支梁;B.外伸梁;C. 悬臂梁。 5. 一般飞轮应布置在转速(B )的轴上。 A. 较低;B. 较高;C. 适中。 6. 在下列平面四杆机构中,有急回性质的机构是(C )。 A. 双曲柄机构;B. 对心曲柄滑块机构;C. 摆动导杆机构; D. 转动导杆机构。 7. 带传动是借助带和带轮间的(B )来传递动力和运动的。 A. 啮合;B.磨擦;C. 粘接。 8. 曲柄摇杆机构的死点发生在(C )位置。 A. 主动杆与摇杆共线;B. 主动杆与机架共线;C.从动杆与连杆共线;D. 从动杆与机架共线。 9. 在带传动中(减速传动) ,带的应力最大值发生在带(C )。 A. 进入大带轮处;B. 离开大带轮处;C. 进入小带轮处;D. 离开小带轮处。 10. 一对渐开线直齿圆柱齿轮正确啮合的条件是(D )。 A. 两齿轮的模数和齿距分别相等; B. 两齿轮的齿侧间隙为零; C. 两齿轮的齿厚和齿槽宽分别相等;D. 两齿轮的模数和压力角分别相等。 D. 蜗杆圆周速度提高。
机械设计基础考试题库及答案
《机械设计基础》考试题库 一、 名词解释 1.机械: 2.机器: 3.机构: 4.构件: 5.零件: 6.标准件: 7.自由构件的自由度数: 8.约束: 9.运动副: 10.低副: 11.高副: 23.机构具有确定运动的条件: 24.死点位置: 25.急回性质: 26.间歇运动机构: 27.节点: 28.节圆: 29.分度圆: 30.正确啮合条件: 31.连续传动的条件: 32.根切现象: 33.变位齿轮: 34.蜗杆传动的主平面: 35.轮系: 36.定轴轮系: 37.周转轮系: 38.螺纹公称直径:螺纹大径。39. 心轴: 40.传动轴: 41.转轴: 二、 填空题 1. 机械是(机器)和(机构)的总称。 2. 机构中各个构件相对于机架能够产生独立运动的数目称为(自由度)。 3. 平面机构的自由度计算公式为:(F=3n-2P L -P H )。 4. 已知一对啮合齿轮的转速分别为n 1、n 2,直径为D 1、D 2,齿数为z 1、z 2,则其传动比i= (n 1/n 2)= (D 2/D 1)= (z 2/ z 1)。 5. [ 6. 铰链四杆机构的杆长为a=60mm ,b=200mm ,c=100mm ,d=90mm 。若以杆C为机架,则此四杆机构为(双摇杆机构)。 7. 在传递相同功率下,轴的转速越高,轴的转矩就(越小)。 8. 在铰链四杆机构中,与机架相连的杆称为(连架杆),其中作整周转动的杆称为(曲柄),作往复摆动的杆称为(摇杆),而不与机架相连的杆称为(连杆)。 9. 平面连杆机构的死点是指(从动件与连杆共线的)位置。 10. 平面连杆机构曲柄存在的条件是①(最短杆与最长杆长度之和小于或等于其它两杆长度之和)②(连架杆和机架中必有一杆是最短杆)。 11. 平面连杆机构的行程速比系数K=是指(工作)与(回程)时间之比为(),平均速比为(1:)。 12. 凸轮机构的基圆是指(凸轮上最小半径)作的圆。 13. 凸轮机构主要由(凸轮)、(从动件)和(机架)三个基本 构件组成。 14. 带工作时截面上产生的应力有(拉力产生的应力)、(离心 拉应力)和(弯曲应力)。 15. 带传动工作时的最大应力出现在(紧边开始进入小带轮) 处,其值为:σmax=σ1+σb1+σc 。 16. 、 17. 普通V带的断面型号分为(Y 、Z 、A 、B 、C 、D 、E )七种,其 中断面尺寸最小的是(Y )型。 18. 为保证齿轮传动恒定的传动比,两齿轮齿廓应满足(接触 公法连心线交于一定点)。 19. 渐开线的形状取决于(基)圆。 20. 一对齿轮的正确啮合条件为:(m 1 = m 2)与(α1 = α2)。 21. 一对齿轮连续传动的条件为:(重合度1>ε)。 22. 齿轮轮齿的失效形式有(齿面点蚀)、(胶合)、(磨损)、(塑 性变形)和(轮齿折断)。 23. 一对斜齿轮的正确啮合条件为:(m 1 = m 2)、(α 1 = α2) 与(β1=-β2)。 24. 蜗杆传动是由(蜗杆、蜗轮)和(机架)组成。 25. 通过蜗杆轴线并垂直蜗轮轴线的平面称为(中间平面)。 26. 常用的轴系支承方式有(向心)支承和(推力)支承。 27. [ 28. 轴承6308,其代号表示的意义为(6:深沟球轴承、3:直径 代号,08:内径为Φ40)。 29. 润滑剂有(润滑油)、(润滑脂)和(气体润滑剂)三类。 30. 列举出两种固定式刚性联轴器(套筒联轴器)、(凸缘联轴 器)。 31. 轴按所受载荷的性质分类,自行车前轴是(心轴)。 32. 普通三角螺纹的牙形角为(60)度。 33. 常用联接螺纹的旋向为(右)旋。 34. 普通螺栓的公称直径为螺纹(大)径。 35. 在常用的螺纹牙型中(矩形)形螺纹传动效率最高,(三角)形螺纹自锁性最好。 36. 减速器常用在(原动机)与(工作机)之间,以降低传速或增大转距。 37. 两级圆柱齿轮减速器有(展开式)、(同轴式)与(分流式)三种配置齿轮的形式。 38. 《 39. 轴承可分为(滚动轴承)与(滑动轴承)两大类。 40. 轴承支承结构的基本形式有(双固式)、(双游式)与(固游式)三种。 41. 轮系可分为(平面轮系)与(空间轮系)两类。 42. 平面连杆机构基本形式有(曲柄摇杆机构)、(双曲柄机构)与(双摇杆机构)三种。 43. 凸轮机构按凸轮的形状可分为(盘形凸轮)、(圆柱凸轮)与(移动凸轮)三种。 44. 凸轮机构按从动件的形式可分为(尖顶)、(滚子)与(平底)三种。 45. 变位齿轮有(正变位)与(负变位)两种;变位传动有(等移距变位)与(不等移距变位)两种。 46. 按接触情况,运动副可分为(高副)与(低副) 。 47. 轴上与轴承配合部分称为(轴颈);与零件轮毂配合部分称为(轴头);轴肩与轴线的位置关系为(垂直)。 48. 螺纹的作用可分为(连接螺纹)和(传动螺纹) 两类。 49. : 50. 轮系可分为 (定轴轮系)与(周转轮系)两类。 51. 常用步进运动机构有(主动连续、从动步进)与(主动步进、从动连续)两种。 52. 构件是机械的(运动) 单元;零件是机械的 (制造) 单元。 53. V 带的结构形式有(单楔带)与(多楔带)两种。 三、 判断题 1. 一个固定铰链支座,可约束构件的两个自由度。× 2. 一个高副可约束构件的两个自由度。× 3. 在计算机构自由度时,可不考虑虚约束。× 4. ' 5. 销联接在受到剪切的同时还要受到挤压。√ 6. 两个构件之间为面接触形成的运动副,称为低副。√ 7. 局部自由度是与机构运动无关的自由度。√ 8. 虚约束是在机构中存在的多余约束,计算机构自由度时应除去。√ 9. 在四杆机构中,曲柄是最短的连架杆。× 10. 压力角越大对传动越有利。× 11. 在曲柄摇杆机构中,空回行程比工作行程的速度要慢。× 12. 偏心轮机构是由曲柄摇杆机构演化而来的。√ 13. 曲柄滑块机构是由曲柄摇杆机构演化而来的。√ 14. 减速传动的传动比i <1。× 15. \ 16. Y型V带所能传递的功率最大。× 17. 在V带传动中,其他条件不变,则中心距越大,承载能力越大。× 18. 带传动一般用于传动的高速级。× 19. 带传动的小轮包角越大,承载能力越大。√ 20. 选择带轮直径时,直径越小越好。× 21. 渐开线上各点的压力角不同,基圆上的压力角最大。× 22. 基圆直径越大渐开线越平直。√ 23. 设计蜗杆传动时,为了提高传动效率,可以增加蜗杆的头数。 √ 24. 在润滑良好的闭式齿轮传动中,齿面疲劳点蚀失效不会发生。 ×