机器视觉高速相机镜头焦距

机器视觉高速相机镜头焦距的计算
关键字:高速相机,机器视觉,镜头焦距
机器视觉系统是用机器代替人眼来做测量和判断。机器视觉系统的一般组成是:光源,镜头,高速工业相机,通讯单元,采集卡,存储系统,图像处理软件。图像传感器将被摄目标的光信号转换成电信号,再转换成数字化信号,图像系统对这些信号进行处理,获取目标的特征,根据判别的结果来控制现场的设备动作。为了能清楚的成像选择一个合适的镜头是必不可少的,然而焦距的确定又是重要的一环。下面介绍几种镜头焦距的计算方法。
图1:机器视觉系统
1、一般焦距的计算
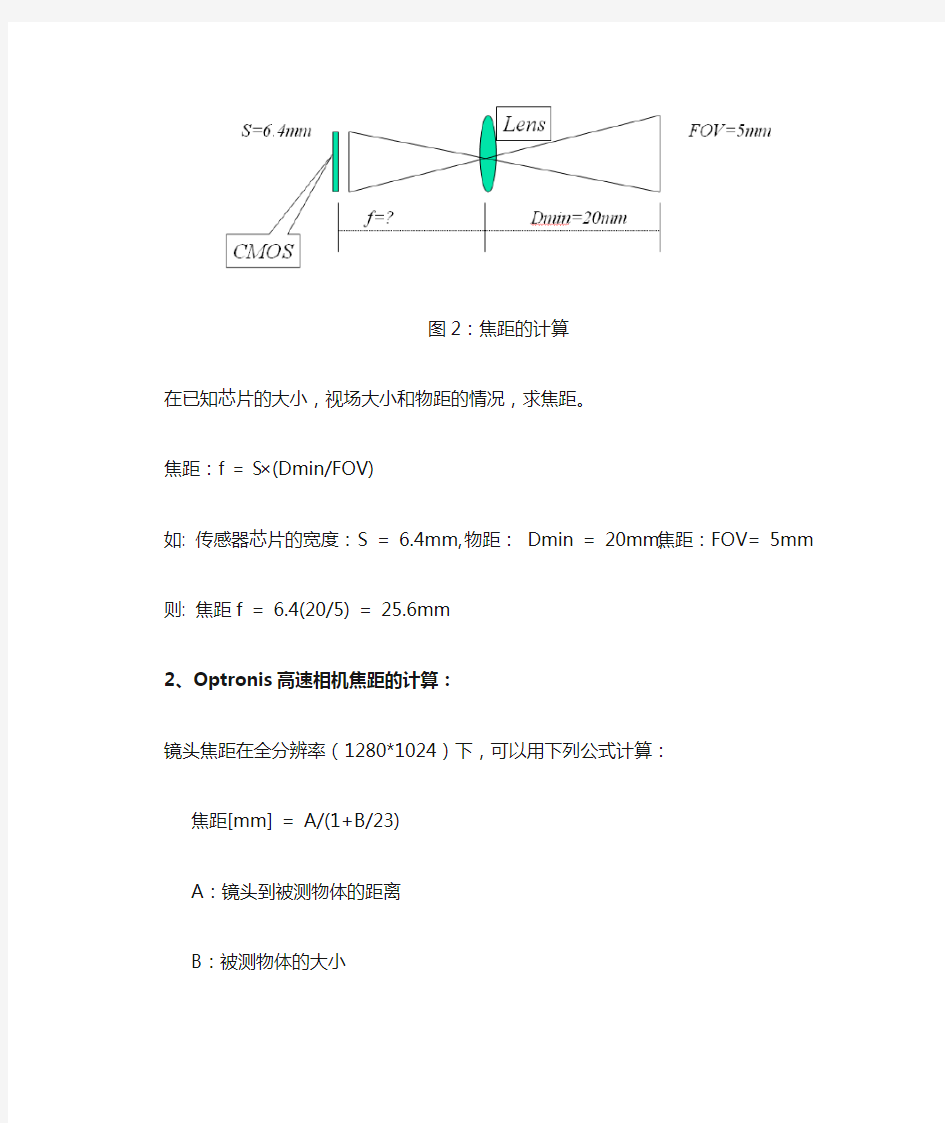
图2:焦距的计算
在已知芯片的大小,视场大小和物距的情况,求焦距。
焦距:f = S×(Dmin/FOV)
如: 传感器芯片的宽度:S = 6.4mm, 物距:Dmin = 20mm,焦距:FOV= 5mm 则: 焦距f = 6.4(20/5) = 25.6mm
2、Optronis高速相机焦距的计算:
镜头焦距在全分辨率(1280*1024)下,可以用下列公式计算: 焦距[mm] = A/(1+B/23)
A :镜头到被测物体的距离
B :被测物体的大小
例如:
A :镜头到北侧物体的距离 = 300 mm
B :被测物体大小 = 100 mm
则,焦距 = (300:(1+(100:23)))
因此选择焦距 = 50mm
3、Optronis 高速工业相机开窗后的镜头焦距计算
在开窗的情况下(比如:800*600)焦距的计算如下:
传感器大小[mm] = 0.01422D C
焦距[mm] = A/(1+B/传感器大小[mm])
A :镜头到被测物体的距离(mm )
B :被测物体的大小(mm )
C :水平方向像素数
D :垂直方向像素数
例如:
C :水平方向像素数 = 800
D :垂直方向像素数 = 600
A :镜头到物体的距离 = 300 mm
B :物体的大小 = 100 mm
计算出焦距 = (300:(1+(100:14)))= 36.8mm
详细情况请参考湖南科天健光电技术有限公司,网站:https://www.360docs.net/doc/3f13087822.html,
相机基本使用方法
相机基本使用方法 基本可调参数设置 我们在照相时,可调整的参数主要有光圈F值、曝光时间、ISO感光度、白平衡、曝光补偿值等。由于根据现场实际情况的差异,下面介绍的设置方法并非是一成不变地适用,仅仅是一种经验与规律性的总结,实际操作时还需进行相应改进处理。 1.光圈值 光圈值与光圈大小成反比,决定通过镜头进入感光元件的光线的多少光圈越大,亮度越高。 (1)在室外夜晚、较暗的阴天或阴暗室内的暗弱照明条件下,F值可设置为f/2、f/2.8; (以获得足够的曝光量。由于景深浅,有助于使背景离开焦点,从而把注意力集中到被摄主体上。) (2)在多云天气,阴影下或是较明亮的室内,F值可设置为f/4、f/5.6; (可以具有该镜头最佳的结像质量。具有稍大的景深。提供有限的清晰聚焦的范围,以便当照明情况较最佳状态稍差时获得合适的曝光量。) (3)在户外日光充足或室内明亮照明情况下,F值可设置为f/8、f/11及以上; (具有很大的景深与极好的结像质量。) 2.快门速度(曝光时间) 相机曝光时间是指从快门打开到关闭的时间间隔,在这一段时间内,物体在底片上留下影像。曝光时间越短,景深越短,抓拍效果越好。 (1)暗淡照明情况下拍摄静景:1秒、1/2秒,需要相机支架; (使用小光圈获得大景深和足够的曝光量,可用现场光或摄影灯照明) (2)暗淡照明情况下的人物肖像:1/4秒,1/8秒,需要相机支架; (使用小光圈以获得大景深和足够的曝光量) (3)多云天气或阴影处:1/30秒、1/60秒; (使用小光圈以增大景深,相机意外地受到震动而使拍摄失败的情况可能较明显。适用于单反相机的闪光灯同步。) (4)户外较充足日光下:1/125秒; (使用中等大小的光圈到小光圈能产生很好的景深来自相机本身的微弱震动减到最小。适合用于某些单镜头反光照相机使用闪光灯拍摄。) (5)抓拍一般速度运动体:1/250秒; (当你并不需要大景深,而主要是想抓住动作的时候,可以在户外日光照明情况下用这档快门速度,以使相机的震动程度减至最小。适合于手持相机安装上250mm焦距镜头进行拍摄。) (6)抓拍速度较快物体:1/500秒、1/1000秒; (因为使用该快门速度时需用比其它快门速度时更大的光圈,因此它的景深最小。这是手持相机400mm以内焦距的长焦距镜头进行拍摄时极好的快门速度。) 3.光圈与快门的组合 在摄影过程中,相机的光圈值和快门速度设置相当重要。光圈值主要用来控制光线穿过孔的大小,而快门速度则是控制光线投射到胶卷上的时间。只有将二者都设置得恰到好处,才能达到最令人满意的曝光效果。 光圈与快门的最佳组合表:
浅谈机器视觉的应用——智能车牌识别系统
浅谈机器视觉的应用——智能车牌识别系统 随着科学技术的迅猛发展,现在已进入一个智能时代,越来越多的智能产品面世,智能化不仅仅体现在手机方面,还有机器视觉。机器视觉就是用机器代替人眼来做测量和判断,常用机器视觉来替代人工视觉。因为机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。而机器视觉的运用也较为广泛,像嵌入式车牌识别摄像机就是其很好的代表。尤其是车牌识别摄像机运用在停车场,因停车场的外在影响因素颇多,要想实现车牌识别系统在机器视觉方面全方位提升就必须能识别各式各样的车牌,还要能在各种极端环境下识别各式车牌。 车牌做为车辆身份的唯一标识当仁不让的被选作车牌识别结果的一个判断标准。但是车牌看似是一固有物体,但是其中也深藏着很多的奥妙,为车牌识别系统增加了不少识别难度,其难度可以分为4大方面。 (1)车牌颜色:就车牌颜色而言也具有多样性,不同领域的车辆有不同的颜色表示,比如蓝底白字、黄底黑字、黑底白字等等。到目前为止车牌识别系统对常见的蓝牌,黄牌的识别效果还不错,但是对多样车牌的完善程度还是有待提升的。对于车牌颜色的识别火眼臻睛车牌识别系统运用了车辆牌照字符和颜色联合识别方法,其最大的特征是将车牌区域划分为字符区域和背景区域,再而对背景区域进行颜色识别。下图列出的是多样车牌不同背景颜色、字体颜色的代表。
(2)字符:为了区分不同地域,每个地区都有自己独特的代表汉字。汉字也称为字符,字符识别属于模式识别领域,因汉字的笔画较多,字符点阵分辨率低,字符所占的像素比较少,给识别效果增加了一定的难度。 (3)数字:组成车牌的另两个因素是字母和数字,简单的阿拉伯数字、英文字母放在一起处理,识别算法复杂。尤其是字线和数字相似度大且经常成像不清晰,使得一些仅仅依靠形体特征识别的算法不适用。 (4)形态:多样车牌也存在着别外一个因素——双层、单层。双层黄牌,双层军牌就是典型的代表,因为单层和双层车牌的大小尺寸不统一,加之成像角度的不同,又给车牌定位算法增加了难度。 对车牌识别系统而言除了解决多样车牌还有环境的复杂度。每一个停车场都有着自己独特的样貌,车牌识别摄像机必须适用于每一个停车场并能做到识别率高且稳定、成像清晰,就不得不考虑车牌识别系统对每个停车场的识别度也就是优异的成像,比如在逆光下,顺光等等环境下怎么能更好的识别车牌,目前对于强光环境用到了双重宽动态有效的抑制强光;对于光线不足的环境可以调动智能补光灯来补充光照使车牌识别效果达到最佳。
机器视觉系统中常用工业相机的种类
机器视觉系统中常用工业相机的分类 根据不同感光芯片划分 我们知道感光芯片是摄像机的核心部件,目前摄像机常用的感光芯片有CCD和CMOS 两种: 1.CCD摄像机,CCD称为电荷耦合器件,CCD实际上只是一个把从图像半导体中出 来的电子有组织地储存起来的方法。 称为互补金属氧化物半导体,CMOS实际上只是将晶体管2.CMOS摄像机,CMOS“” 放在硅块上的技术,没有更多的含义。 表示互补金属氧化物半导体,但是不论CCD 表示电荷耦合器件而CMOS“” 尽管CCD“” 对于图像感应都没有用,真正感应的传感器称做图像半导体,CCD和CMOS 或者CMOS“” 传感器实际使用的都是同一种传感器图像半导体,图像半导体是一个P N结合半导体,能 “” 够转换光线的光子爆炸结合处成为成比例数量的电子。电子的数量被计算信号的电压,光线进入图像半导体得越多,电子产生的也越多,从传感器输出的电压也越高。 1 因为人眼能看到Lux照度(满月的夜晚)以下的目标,CCD传感器通常能看到的照度 传感器感光度的到倍,所以目前一般CCD摄像机的图像质范围在Lux,是CMOS310 0.1~3 量要优于CMOS摄像机。CMOS可以将光敏元件、放大器、A/D转换器、存储器、数字 信号处理器和计算机接口控制电路集成在一块硅片上,具有结构简单、处理功能多、速度快、耗电低、成本低等特点。CMOS摄像机存在成像质量差、像敏单元尺寸小、填充率低等问题,年后出现了有源像敏单元结构,不仅有光敏元件和像敏单元的寻址开关,而且还1989“” 有信号放大和处理等电路,提高了光电灵敏度、减小了噪声,扩大了动态范围,使得一些参数与CCD摄像机相近,而在功能、功耗、尺寸和价格方面要优于CCD,逐步得到广泛的应用。CMOS传感器可以做得非常大并有和CCD传感器同样的感光度,因此非常适用于特殊 应用。CMOS传感器不需要复杂的处理过程,直接将图像半导体产生的电子转变成电压信号,因此就非常快,这个优点使得CMOS传感器对于高帧摄像机非常有用,高帧速度能达 到到帧秒。 400100000/ 按输出图像信号格式划分 模拟摄像机 模拟摄像机所输出的信号形式为标准的模拟量视频信号,需要配专用的图像采集卡才能 转化为计算机可以处理的数字信息。模拟摄像机一般用于电视摄像和监控领域,具有通用性好、成本低的特点,但一般分辨率较低、采集速度慢,而且在图像传输中容易受到噪声干扰,导致图像质量下降,所以只能用于对图像质量要求不高的机器视觉系统。常用的摄像机输出信号格式有: 中国电视标准,行,场 PAL(黑白为CCIR),62550
机器视觉基础知识详解模板
机器视觉基础知识详解 随着工业4.0时代的到来,机器视觉在智能制造业领域的作用越来越重要,为了能让更多用户获取机器视觉的相关基础知识,包括机器视觉技术是如何工作的、它为什么是实现流程自动化和质量改进的正确选择等。小编为你准备了这篇机器视觉入门学习资料。 机器视觉是一门学科技术,广泛应用于生产制造检测等工业领域,用来保证产品质量,控制生产流程,感知环境等。机器视觉系统是将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉优势:机器视觉系统具有高效率、高度自动化的特点,可以实现很高的分辨率精度与速度。机器视觉系统与被检测对象无接触,安全可靠。人工检测与机器视觉自动检测的主要区别有:
为了更好地理解机器视觉,下面,我们来介绍在具体应用中的几种案例。 案例一:机器人+视觉自动上下料定位的应用: 现场有两个振动盘,振动盘1作用是把玩偶振动到振动盘2中,振动盘2作用是把玩偶从反面振动为正面。该应用采用了深圳视觉龙公司VD200视觉定位系统,该系统通过判断玩偶正反面,把玩偶处于正面的坐标值通过串口发送给机器人,机器人收到坐标后运动抓取产品,当振动盘中有很多玩偶处于反面时,VD200视觉定位系统需判断反面玩偶数量,当反面玩偶数量过多时,VD200视觉系统发送指令给振动盘2把反面玩偶振成正面。 该定位系统通过玩偶表面的小孔来判断玩偶是否处于正面,计算出玩偶中心点坐标,发送给机器人。通过VD200视觉定位系统实现自动上料,大大减少人工成本,大幅提高生产效率。 案例二:视觉检测在电子元件的应用: 此产品为电子产品的按钮部件,产品来料为料带模式,料带上面为双排产品。通过对每个元器件定位后,使用斑点工具检测产品固定区域的灰度值,来判断此区域有无缺胶情况。 该应用采用了深圳视觉龙公司的DragonVision视觉系统方案,使用两个相机及光源配合机械设备,达到每次检测双面8个产品,每分钟检测大约1500个。当出现产品不良时,立刻报警停机,保证了产品的合格率和设备的正常运行,提高生产效率。
(完整版)手机拍照技巧大全(绝对值得收藏)
手机拍照技巧大全(绝对值得收藏) 手机摄影技巧大全 手机拍照技巧大全(绝对值得收藏)1、了解手机照相机的特点 为了更好的使用手机照相机拍好照片,有必要了解手机照相机的特点,以便在使用过程中,能扬长避短,发挥好手机照相机的功能。无论是拥有专业的高端照相机,还是只有一部形影不离的拍照手机,想要拍出很有Feeling的照片或者很棒的摄影作品,基本的摄影常识是需要了解和掌握的!手机照相机不完全等同于大家理解的数码相机【业界又简称DSC,英文全称Digital Still Camera】,虽然照相实现的原理是一样的,但它们的区别还是很明显的,下面通过看看手机照相机与DSC的一些区别来认识并掌握好拍照手机的正确使用。1. 变焦功能的区别手机照相机与数码相机最明显的区别之一就是光学变焦功能,拍照手机由于整机轻薄设计的要求,和手机电池续航的要求,基本上都没有实现光学变焦功能,仅支持数码变焦功能。但光学变焦和数码变焦的区别却相差非常大。光学变焦是通过移动镜片位置来改变放大倍率,达到望远放大的功能。是不会影响实际照片的细节的;但数码变焦则相反,其实现是通过软件方式截取成像面上的一部分进行
软件插值放大,以达到变焦的效果。就像一张固定尺寸的图片,用软件不断放大某个局部,就会越来越模糊并产生马赛克(锯齿状)现象,照片放大倍数最大,其画质损失越严重。因此,我们就了解了为什么绝大部分手机上使用变焦放大后拍照效果不好(变焦倍数越大,效果越差)。而具有光学变焦功能的数码相机却没有这个问题。 CMOS手机未变焦CMOS手机3倍变焦 CCD数码相机未变焦CCD数码相机3倍变焦 ★拍照手机的这个特点告诉我们,要酌情使用手机上的数码变焦功能,尽量不要使用数码变焦功能,如果确实需要放大拍摄,根据自己手机数码变焦的实际情况采用适当的放大倍数,减少画质的损失。 2. 闪光灯的区别使用过数码相机后都观察到,拍照手机对比数码相机另一个明显的区别就是配置的闪光灯有所不同。除了极少数手机上配置了相机上大功率的氙气闪光灯(Xenon),其他的基本上都是配置LED闪光灯,这两种灯的主要区别是在发光强度和照射范围上,由此影响夜间和低光场景的拍照效果。在相机行业里,闪光灯涉及一个参数,术语叫Guide Number(闪光灯指数,又称简GN
浅谈企业视觉标识系统
浅谈企业的视觉识别系统 企业视觉识别系统是企业识别系统的重要组成部分。它是在理念识别(MIS)和行为识别(BIS)的基础上,通过一系列形象设计,将企业经营理念、行为规范等,即企业文化内涵,传达给社会公众的系统策略,是企业全部视觉形象的总和。企业视觉识别系统将企业的品牌理念与核心价值通过视觉传播形式,有组织有计划地传递给客户、公众和企业员工,从而树立起统一的企业形象。 企业视觉识别系统是企业形象最直观的表现。企业的VIS系统需要保持内在的一致性和外在的差异性,即企业所有视觉设计都要严格地遵循统一的标准,同时要与其他企业保持鲜明的差异,以便促进客户产生强烈的共鸣。一个优秀的视觉识别系统可以使人们快速理解企业希望传递的信息。 企业视觉识别系统是企业识别系统CIS的视觉符号,是企业形象的视觉传递形式,它是CIS最有效、最直接的的表达。企业视觉识别系统是由体现企业理念和业务性质、行为特点的各种视觉设计符号及其各种应用因素所构成。是企业理念系统和行为识别系统在视觉上的具体化、形象化。企业通过形象系统的视觉识别符号将企业经营信息传达给社会公众,从而树立良好的企业形象。 根据心理学理论,人们日常接受外界刺激所获得的信息量中,以视觉感官所占的比例最高。而且视觉传播最为直观具体,感染力最强。因而,采取某种一贯的、统一的视觉符号,并通过各种传播媒体加以推广,可使社会公众能够一目了然地掌握所接触的信息,造成一种持久的、深刻的视觉效果。从而对宣传企业的基本精神及其独特性起到很好的效果。 一、企业视觉识别系统的基本内容 VIS所涉及的项目最多、层面最广、效果最直接,与社会公众的联系最为广泛、密切。归纳起来,可分为基本要素和应用要素两部分。 (一)企业视觉识别系统的基本要素。VIS设计的基本要素系统严格规定了标志图形标识、中英文字体形、标准色彩、企业象征图案及其组合形式,从根本上规范了企业的视觉基本要素,基本要素系统是企业形象的核心部分,包括:企业名称、企业标志、企业标准字、标准色彩、象征图案、组和应用和企业标语口号等。 1,.企业名称。企业名称和企业形象有着紧密的联系,是CIS设计的前提条件,是采用文字来表现识别要素。企业名称的确定,必须要反映出企业的经营思想,体现企业理念;要有独特性,发音响亮并易识易读,注意谐音的念义,以避免引起不佳的理想。名字的文字要简洁
众多摄影小技巧
众多摄影小技巧 摄影小技巧1.如何摇拍 摇拍是一种拍摄移动中被摄体的技法。其特点是把摄影重点放在了静态的部分,以摇动镜头的方式跟随被摄体,表现其速度感。要使用此种拍摄技法,需要把相机设置到快门优先的模式上,然后使用较慢的快门速度,一般采用1/30s或者1/60s。相机要紧随被摄体,跟随其运动而移动,达到被摄体清晰,背景模糊的效果。当然采用连拍的模式捕捉更锐利的照片的机会更大。 摄影小技巧2.在斜坡上如何放置三脚架 如果在斜坡上用三脚架辅助拍摄,有一个方法可以让相机远离突发危险。如果我们是在一块岩石或者小山上的斜坡上拍摄,让三脚架的一条腿对着自己,这样的话,三脚架的三条腿就可以稳定地支撑住相机,防止坠落。 摄影小技巧3.如何避免曝光不足 摄影者在拍照时经常会曝光不足,打开闪光灯拍摄又怕会过亮,牺牲了现场环境的自然光线。遇到此种情况,最佳方法就是利用相机的曝光补偿功能。只要将曝光补偿功能推高一至两级,一般偏暗的情况就会有所改善。 摄影小技巧4.如何先对焦后构图 先将画面中央的对焦点对准想拍摄的人物面部,半按快门按钮完成对焦及测光程序,按着快门按钮不放,横向移动相机重新构图。 摄影小技巧5.光圈优先什么用途 数码单反相机往往带有较大光圈数的镜头,在自动模式下相机的程序也倾向于使用较大的光圈以缩短快门时间,减少因震动而造成的不良拍摄效果。但是,相机镜头一般是在从最大光圈收缩两级左右时拍摄的图像效果最好,所以如果要拍摄高质量的图像,可以使用光圈优先自动曝光,把光圈从最大往下调小一些。另外,大光圈可以实现小景深,这有利于突出主体。 摄影小技巧6.如何避免眩光 直接拍摄太阳,会在镜头内产生眩光,从而使画面的反差严重失调,同时会产生入射光线被镜头表面反射到CCD上而形成光斑线条。高质量的遮光罩有助于限制眩光,同时使用最小光圈可减少这些光斑。 摄影小技巧7.如何使灯光产生星状效果
机器视觉应用有哪些 浅谈机器视觉软件的介绍与选择
机器视觉应用有哪些浅谈机器视觉软件的介绍与选择 本文主要是关于机器视觉的相关介绍,并着重对机器视觉的应用场景进行了详尽的阐述。 机器视觉机器视觉是人工智能正在快速发展的一个分支。简单说来,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是通过机器视觉产品(即图像摄取装置,分CMOS 和CCD两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉是一项综合技术,包括图像处理、机械工程技术、控制、电光源照明、光学成像、传感器、模拟与数字视频技术、计算机软硬件技术(图像增强和分析算法、图像卡、I/O 卡等)。一个典型的机器视觉应用系统包括图像捕捉、光源系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块。[2]机器视觉系统最基本的特点就是提高生产的灵活性和自动化程度。在一些不适于人工作业的危险工作环境或者人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉。同时,在大批量重复性工业生产过程中,用机器视觉检测方法可以大大提高生产的效率和自动化程度。 一个典型的工业机器视觉系统包括:光源、镜头(定焦镜头、变倍镜头、远心镜头、显微镜头)、相机(包括CCD相机和COMS相机)、图像处理单元(或图像捕获卡)、图像处理软件、监视器、通讯/ 输入输出单元等。 系统可再分为 一、采集和分析分开的系统。 主端电脑(Host Computer) 影像撷取卡(Frame Grabber)与影像处理器 影像摄影机 定焦镜头镜头 显微镜头
单反相机的一些基本常识
第一章:相机的基本构造 简单来说,你手里的相机其实基本上就是一个身体上带洞并且内部装有感光器的盒子。如果,我们能够使合适的光线透过洞投射到感光器上面的话,我们就能够得到一张正确曝光的照片。 首先,是单反相机的基本原理图:
1、P档和自动档的区别 刚接触到数码相机,一定会发现除了表示自动曝光的P档之外,还有一个全自动档。其实这两者之间还是有很大的区别的。 实际上P档是在TV和A V这两种半自动曝光模式之后出现的全自
动曝光模式,P档和绿区自动挡的区别就在于P档之下,你可以自由的设定光圈、ISO、测光模式、连拍模式以及对焦点等等。而一旦我们拨到绿区的自动挡之后,也就是相当于把所有的控制权完全交给了相机了。用户一个选项都不能调节,这个时候你手里的相机就是完全的傻瓜自动式。至于其他的场景模式,比如:运动、夜景之类的则是绿区全自动的变种,是已经设定好的曝光模式。其他我们常见的模式,还包括:人像模式、运动模式、风景模式和微距模式等。其中,人像模式在设定曝光参数时会偏向大光圈,而运动模式则会偏向高速运动快门,而其他两种则是偏向于小光圈的使用。 2、光学防抖 最近这几年,从相机的发展来看,防抖技术的使用已经从高端机向低端机慢慢地普及。其实,从原理上来看,防抖技术主要可以划分为三大类:一种是依靠ISO增大来实现的电子防抖,一种是以牺牲有效象素为代价的数码防抖。除此之外,真正有意义的是光学防抖技术。光学防抖技术,目前看来,主要有佳能IS为代表的镜身防抖技术,以及以美能达AS为代表的机身防抖技术。 下面我们为大家剖析一下,光学防抖的基本原理。镜身防抖系统的作用原理是在镜头内部搭载了加速传感器,感知镜头的运动状况之后移动镜头中某一片或一组镜片来补偿镜头运动而造成的图像位移。 机身防抖技术则是从加速度传感器感受机身运动状态来补偿图像位移。
机器视觉入门知识详解
机器视觉入门知识详解 随着工业4.0时代的到来,机器视觉在智能制造业领域的作用越来越重要,为了能让更多用户获取机器视觉的相关基础知识,包括机器视觉技术是如何工作的、它为什么是实现流程自动化和质量改进的正确选择等。小编为你准备了这篇机器视觉入门学习资料。 机器视觉是一门学科技术,广泛应用于生产制造检测等工业领域,用来保证产品质量,控制生产流程,感知环境等。机器视觉系统是将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉优势:机器视觉系统具有高效率、高度自动化的特点,可以实现很高的分辨率精度与速度。机器视觉系统与被检测对象无接触,安全可靠。人工检测与机器视觉自动检测的主要区别有:
为了更好地理解机器视觉,下面,我们来介绍在具体应用中的几种案例。 啤酒厂采用的填充液位检测系统为例来进行说明: 当每个啤酒瓶移动经过检测传感器时,检测传感器将会触发视觉系统发出频闪光,拍下啤酒瓶的照片。采集到啤酒瓶的图像并将图像保存到内存后,视觉软件将会处理或分析该图像,并根据啤酒瓶的实际填充液位发出通过-未通过响应。如果视觉系统检测到一个啤酒瓶未填充到位,即未通过检测,视觉系统将会向转向器发出信号,将该啤酒瓶从生产线上剔除。操作员可以在显示屏上查看被剔除的啤酒 瓶和持续的流程统计数据。
机器人视觉引导玩偶定位应用: 现场有两个振动盘,振动盘1作用是把玩偶振动到振动盘2中,振动盘2作用是把玩偶从反面振动为正面。该应用采用了深圳视觉龙公司VD200视觉定位系统,该系统通过判断玩偶正反面,把玩偶处于正面的坐标值通过串口发送给机器人,机器人收到坐标后运动抓取产品,当振动盘中有很多玩偶处于反面时,VD200视觉定位系统需判断反面玩偶数量,当反面玩偶数量过多时,VD200视觉系统发送指令给振动盘2把反面玩偶振成正面。 该定位系统通过玩偶表面的小孔来判断玩偶是否处于正面,计算出玩偶中心点坐标,发送给机器人。通过VD200视觉定位系统实现自动上料,大大减少人工成本,大幅提高生产效率。 视觉检测在电子元件的应用:
机器视觉检测的基础知识[大全]
机器视觉检测的基础知识~相机 容来源网络,由“机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在机械展. 相机都有哪些种类?我们常说的CCD就是相机么?除了2D平面相机,是否还有其他种类的相机,原理又是什么?下面这篇文章给您一一道来。 一,相机就是CCD么? 通常,我们把所有相机都叫作CCD,CCD已经成了相机的代名词。正在使用被叫做CCD的很可能就是CMOS。其实CCD和CMOS都称为感光元件,都是将光学图像转换为电子信号的半导体元件。他们在检测光时都采用光电二极管,但是在信号的读取和制造方法上存在不同。两者的区别如下: 二,像素。 所谓像素,是指图像的最小构成单位。电脑中的图像,是通过像素(或者称为PIXEL)这一规则排列的点的集合进行表现的。每一个点都拥有色调和阶调等色彩信息,由此就可以描绘出彩色的图像。 ▼例如:液晶显示器上会显示「分辨率:1280×1024」等。这表示横向的像素数为1280,纵向的像素数为1024。这样的显示器的像素总数即为1280×1024=1,310,720。由于像素数越多,则越可以表现出图像的细节,因此也可以说「清晰度更高」。
三,像素直径。 所谓像素直径,是指每个CCD元件的大小,通常使用μm作为单位。严谨的说,这个大小中包含了受光元件与信号传送通路。(=像素间距,即某个像素的中心到邻近一个像素的中心的距离。)。也就是说,像素直径与像素间距的值是一样的。如果像素直径较小,则图像将通过较小的像素进行描绘,因此可以获得更加精细的图像。可以通过像素直径和有效像素数,求出CCD元件的受光部的大小。 假设某个 CCD 元件的条件如下所示: ·有效像素数…768 × 484 ·像素直径…8.4 μm× 9.8μm 则受光部的大小为 ·横向768 × 8.4μm= 6.4512 mm ·纵向484 × 9.8μm= 4.7432 mm 四,CCD的大小。 ▼CCD感光元件的大小,一般分为采用英寸单位表示和采用APS-C大小等规格表示这2种方式。采用英寸表示时,该尺寸并不是拍摄的实际尺寸,而是相当于摄像管的对角长度。例如,1/2英寸的CCD表示「拥有相当于1/2英寸的摄像管的拍摄围」。为什么如此计算呢,这是由于当初制造CCD的目的就是用来代替电视机录像机的摄像管的。当时,由于想要继续使用镜头等光学用品的需求比较强烈,由此就诞生了这种奇怪的规格。主要的英寸规格的尺寸如下表所示。
5DMarkIII相机拍摄设置基本技巧
5D Mark III相机拍摄设置基本技巧 菜单是单反最主要的设置界面。怎样的设置才是最优化的设置呢?来看看吧 一、菜单中的基本设置: 1、画质:RAW。这种格式细节更丰富,后期可随意调整白平衡、清晰度、色彩饱和度、亮度、对比 度等,对片质的影响很小。后期调整软件可以选择随机附带的DPP软件,关于此软件如何使用,请 参见说明书! 2、提示音:启用。声音的提醒挺好的。 3、未装储存卡释放快门:禁止。 4、图像确认:2秒。新手可以设置5秒,高手可以关闭。 5、周边光量校正:关闭,这个要根据自己的镜头来设置,我设置为关闭。包括以下很多项设置为关 闭,主要是要求速度快,因为开启的调整项目越多,相机的图片处理速度越慢,不利于抓拍。 6、减轻红眼:开。目的是怕拍夜景人像的时候忘记打开。 7、闪光灯闪光:启用。快门同步:前帘同步。闪光曝光补偿:暂设正负零,根据拍摄的具体情况适 时调整。E-TTL II测光:评价测光。 8、曝光补偿:我感觉我的机器测光稍有偏差,正常时我设置为-0.3,拍摄时根据情况适时调整。 9、自动亮度优化:禁用。目的也是为了提高速度。 10、测光模式:多用评价测光,特写的拍摄采用局部测光,更精细的拍摄、逆光等特殊拍摄使用点 测光、光比比较大的场景拍摄使用中央重点平均测光。测光模式需要根据拍摄的具体场景适时选择 最佳的方式。 11、自定义白平衡:遇到可能出好片的场景时可以自己设置,一般的片子就别费那个劲了,留给后 期调整吧。 12、白平衡偏移/包围:操作过,拍片时没有正式用过,很重要的片子用了也不错,设置偏移和包围 以后,再将驱动模式设置为连拍,按下快门,就会出来几张不同白平衡的片子。不过拍完了一定要 记得将此次白平衡偏移/包围的设置清除,不然你下一次的连拍会变得五花八门了。 13、色彩空间:sRGB。关于色彩空间不是一两句话能说明白的,忠告新手及中手就设置sRGB吧,设置为Adode RGB也是没有意义的,用于商业印刷的高手自然就知道怎么设置了。需要注意的是,在 色彩管理上,要保持相机、电脑、图像浏览和处理软件均应保持同一色彩空间,否则就会很惨。 14、照片风格:中性。我经历了“风光”、“自定义”等过程,最后还是选择了0,0,0,0的中性。其目的也是为了减少相机软件处理速度,清晰度采用批量调整,色彩等不满意的个别调整。 15、除尘数据:取消。 16、ISO自动:最高400。这个设置是为基本拍摄区准备的,我几乎不用基本拍摄区。创意拍摄区的 ISO可以根据现场实际随时拨盘设置。 17、保护图像、旋转、删除图像、打印指令、幻灯片播放都不重要,随你怎么设置。 18、显示柱状图:亮度。亮度最重要,直观、简洁。 19、实时显示功能:启用。测光定时器:30秒。自动对焦模式:实时模式。
浅谈机器人视觉技术
浅谈机器人视觉技术 摘要 机器人视觉是使机器人具有视觉感知功能的系统,是机器人系统组成的重要部分之一。机器人视觉可以通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置。机器人视觉广义上称为机器视觉,其基本原理与计算机视觉类似。计算机视觉研究视觉感知的通用理论,研究视觉过程的分层信息表示和视觉处理各功能模块的计算方法。而机器视觉侧重于研究以应用为背景的专用视觉系统,只提供对执行某一特定任务相关的景物描述。机器人视觉硬件主要包括图像获取和视觉处理两部分,而图像获取由照明系统、视觉传感器、模拟-数字转换器和帧存储器等组成。本文介绍了机器人的发展以及视觉计算理论和视觉的关键技术。 关键词:机器人、视觉、计算、关键技术 一、机器人发展概述 科学技术的发展,诞生了机器人。社会的进步也提出要求,希望创造出一种能够代替人进行各种工作的机器,甚至从事人类不能及的事情。自从1959年诞生第一台机器人以来,机器人技术取得了很大的进步和发展,至今已成为一门集机械、电子、计算机、控制、传感器、信号处理等多学科门类为一体的综合性尖端科学。当今机器人技术的发展趋势主要有两个突出的特点:一个是在横向上,机器人的应用领域在不断扩大,机器人的种类日趋增多;另一个是在纵向上,机器人的性能不 断提高,并逐步向智能化方向发展。前者是指应用领域的横向拓宽,后者是在性能及水平上的纵向提高。机器人应用领域的拓宽和性能水平的提高,二者相辅相成、相互促进。 智能机器人是具有感知、思维和行动功能的机器,是机构学、自动控制、计算机、人工智能、微电子学、光学、通讯技术、传感技术、仿生学等多种学科和技术的综合成果阎。智能机器人可获取、处理和识别多种信息,自主地完成较为复杂的操作任务,比一般的工业机器人具有更大的灵活性、机动性和更广泛的应用领域。要使机器人拥有智能,对环境变化做出反应,首先,必须使机器人具有感知
机器视觉检测系统的最经典结构
机器视觉检测系统的最经典结构一个典型的机器视觉系统主要包括五大块,分别是照明、镜头、相机、图像采集和视觉处理器。 下面,我们就来认识一下这五个结构的用途、特点与工作情况。 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。 照明系统可以将被测物特征最大化,并减少相应的背景中对比物的影响,使高速相机可以清晰地“看见”被测物。 高对比的图像可以降低系统难度并提高系统的稳定性;反之,低对比的图像会增加系统的处理时间并使加大系统的复杂度。 机器视觉应用的成功很大一部分取决于照明设置,一个合适的照明系统可以使整个视觉检测系统更具有效率和准确性。 由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。
光源可分为可见光和不可见光。常用的几种可见光源是白炽灯、日光灯、水银灯和钠 光灯。 可见光的缺点是光能不能保持稳定。如何使光能在一定的程度上保持稳定,是实用化过程中急需要解决的问题。 另一方面,环境光有可能影响图像的质量,所以可采用加防护屏的方法来减少环境光的影响。
照明系统按其照射方法可分为:背向照明、前向照明、结构光和频闪光照明等。 其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像。 前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装。 结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解调出被测物的三维信息。 频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。 机器视觉照明要点有使用强光检测缺失的材料、使用合适的波长进行精确定位、使用非散射照明检测玻璃裂缝、使用扩散光检查透明包装、使用颜色来创建对比度等。 相机镜头由多个透镜、可变(亮度)光圈和对焦环组成。使用时由操作者观察相机显示屏来调整可变光圈和焦点,以确保图像的明亮程度及清晰度。 在选择镜头时需要考虑多个方面的因素如焦距、目标高度、影像高度、放大倍数、影像至目标的距离等。 在实际应用中“选择与视场相符的透镜”及“以大景深聚焦图像”是选择镜头时非常重要的两个方面。 机器视觉相机的目的是将通过镜头投影到传感器的图像传送到能够储存、分析和(或者)显示的机器设备上。
数码相机拍摄技巧
1.传统傻瓜相机那样只管按快门就拍照的方式来使用的话,会失去很多使用数码相机的乐趣,因此写出本文的目的就是给大家介绍一下数码相机的主要拍摄模式,以便大家在使用数码相机的过程中能够充分发挥自己的创意,拍出更加漂亮的照片。 2.说到数码相机的拍摄模式,大家可以很直观地在相机的顶上看到一个“模式拨盘”,从这个拨盘上大家就可以看到这款相机的基本拍摄模式。 3.接下来,我们再来看看这个模式拨盘上面所提供的模式,如上图所示,模式拨盘可以分为“基本拍摄区”、“创意拍摄区”和一个全自动拍摄模式(在许多相机上被标注为“Auto”)三部分。
4.人像和夜景人像模式:这两个模式都是适合于人像拍摄,相机自动会使用加强背景虚化的参数设定,使用上非常方便。其中夜景人像模式主要是要采用内置闪光灯照亮被摄物体,而其它方面与人像模式没有什么区别。 5.风光模式:这种模式下,相机会自动使用景深较大的参数,以便拍摄风景。微距模式:这种模式是数码相机最常使用的模式之一,比如拍摄产品等需要很近距离拍摄的情况。运动模式:在运动模式下,相机一般会自动提高ISO感光度,以保证足够快的快门速度,同时还会采取连续自动对焦的方式,保证被摄物体的清晰。 6.创意拍摄区:创意拍摄区顾名思义就是用来搞摄影创作的,不过对于广大数码相机影用户来说,这里的创作并非是要求像专业摄影师那样的创作,更多的是一种自我发挥,也就是想怎么玩就怎么玩,再加上数码相机的即拍即得特性,用好了创意拍摄区的功能,你一定会体会到数码相机的无穷乐趣。 7.P 程序自动AE(程序自动曝光):这个模式粗看起来与基本拍摄区的Auto全自动模式有些雷同,但实际上P模式的“自动”一般仅仅是对于光圈和快门配合的自动,也就是说光圈和快门的参数由相机自动设置,以保证足够的曝光量,从而保证照片的正确曝光,而对于ISO感光值、自动对焦点选择、曝光补偿、闪光灯的开启/关闭等功能都是可以自己设定的,这些在Auto模式中一般是不能变动的,所以P模式其实应该是稍微有点摄影常识的用户最主要的使用模式,并且这个模式比较适合快速的抓拍情况。
浅谈视觉传感器
浅谈视觉传感技术 王恋 (重庆理工大学,贵州省安顺市561009) 摘要:随着科学技术的发展,传感器的研究和应用变得越来越重要,它成为获取信息的重要技术手段,针对不同的应用传感器技术也分为:光电传感技术、光纤传感技术、视觉传感技术、生表面波传感技术、生物传感技术、化学传感技术、前沿传感技术这七大类传感技术,本文将着重介绍视觉传感技术。视觉传感技术因其硬件成本的显著降低,性能的极大提升以及具备了大规模推广的条件得到了绝大多数研究者和工业生产者的青睐,这为视觉传感技术的发展前景奠定了基础,但同时也存在测量精度问题,视觉传感器对环境的高要求也是视觉传感器需要解决的问题,只有提高了测量精度问题和适应环境变化的问题才能使得视觉传感器更具有竞争力和自身优势。 关键词:信息;传感技术;视觉传感技术;测量精度;适应环境 On visual sensing technology Wang Lian (Chongqing University of technology,Anshun City,Guizhou Province,561009,China) Abstract:With the development of science and technology,research and application of the sensor becomes more and more important,it has become an important technical means to obtain information,according to the application of different sensor technologies are also divided into:photoelectric sensor technology,optical fiber sensing technology,visual sensing technology, surface wave sensor technology,biological sensor technology,chemical sensing technology,the sensor technology frontier seven kinds of sensing technology,this paper will focus on the visual sensing technology.Because the visual sensing technology significantly reduce the hardware cost,greatly enhance the performance and have a large-scale promotion of the conditions have been most researchers and industrial producers favor,which laid the foundation for future vision sensing technology,but there are also problems of measurement accuracy,the problem of the high requirement of visual sensor is also a visual environment the sensor needs to be solved,only to improve the measurement accuracy and to adapt the change of environment problems in order to make the visual sensor has more advantages and competitiveness Key words:Information;sensing technology;vision sensing technology;measurement accuracy;adaptation to the environment 0引言 视觉源于生物界获取外部环境信息的一种方式,是自然界生物获取信息的最有效手段,是生物智能的核心组成之一。人类80%的信息都是依靠视觉获取的,基于这一启发研究人员开始为机械安装“眼睛”使得机器跟人类一样通过“看”获取外界信息,由此诞生了一门新兴学科——计算机视觉,人们通过对生物视觉系统的研究从而模仿制作机器视觉系统,尽管与人类视觉系统相差很大,但是这对传感器技术而言是突破性的进步。视觉传感器技术的实质就是图像处理技术,通过截取物体表面的信号绘制成图像从而呈现在研究人员的面前。视觉传感技术的出现解决了其他传感器因场地大小限制或检测设备庞大而无法操作的问题,由此广受工业制造界的欢迎。本文通过对比视觉传感技术的优缺点以及发展趋势来展示视觉传感技术的兴起和应用。 1视觉传感技术概述 视觉传感技术是传感技术七大类中的一个,视觉传感器是指[1]:通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。视觉传感器具有从一整幅图像捕获光线的数以千计的像素。图像的清晰和细腻程度通常用分辨率来衡量,以像素数量表示。在捕获图像之后,视觉传感器将其与内存中存储的基准图像进行比较,以做出分析。它是基于生物视觉和计算机视觉所提出的。视觉传感器是50年代后期出现的,发展十分迅速,是机器人中最重要的传感器之一。机器人视
单反相机拍摄技巧
作者简介:曾任职于广告摄影工作室、出版社,现为自由摄影师。以杂志为中心,活跃于广告、舞台、美食等广阔的摄影领域。从一般爱好者的角度出发进行撰写的文章受到广泛欢迎。出版了多部关于相机和摄影技术的著作。 前言 自从数码单反相机诞生以来,整个摄影界发生了巨大的变化。我们可以使用数码单反做很多胶片相机所无法胜任的工作,这已经是无可否认的事实。拍摄本身由此变得更加简单。数码单反相机继承了很多胶片单反相机的基本构造,在操作方面也有很多共通点。对于用惯了佳能EOS系列胶片单反相机的用户来说,掌握佳能数码单反相机的操作并不需要太长时间。而对于那些已经能够掌握小型数码相机的人来说,只要学会数码单反相机特有的操作方式和知识,做到随心所欲地拍出自己想要的照片也绝非难事。可以说,任何人都能很容易地学会使用数码单反相机。由于拍完能立刻确认拍摄效果,用户的摄影技术将会进步神速,甚至能够在短时间内进入中级水平。而且,数码单反相机最大的特征就是能够更换镜头,这使得摄影的世界更加广阔。而EOS DIGITAL系列相机能够使用的镜头和其他附件非常丰富,所以使用该系列单反相机学习摄影是再好不过的选择了。各种让人用起来得心应手的机身和60款以上的镜头将会为用户的摄影生涯提供强有力的支持。如果将本书置于手边,边看边学,相信在很短时间内大家都能拍摄出不输给专业摄影师的照片。 目录 第一页:https://www.360docs.net/doc/3f13087822.html,/read.php?tid=3393 01 数码单反相机的魅力 02 牢记相机各部分名称 03 拍摄之前的准备工作 04 首先来尝试进行拍摄 05 数码单反相机的结构原理 06 镜头的结构原理 07 相机的持机方法 08 了解构图的基本知识 09 拍好人物照--人像模式 第二页:https://www.360docs.net/doc/3f13087822.html,/read.php?tid=3393&page=2 10 使风景显得更加鲜明--风光模式 11 放大拍摄微小物体--微距模式 12 拍摄高速运动物体--运动模式 13 同时拍摄夜景与人物--夜景人像模式 14 不使用闪光灯进行拍摄--闪光灯关闭模式 专题学会把握各种被摄体的拍摄时机 15 数码单反相机的结构原理 16 自动曝光Av、Tv、P模式 17 理解光圈 18 掌握快门速度
相机镜头参数知识普及
相机镜头参数知识普及 测光方式:一般为矩阵,中央,点测光。 1.测光不要对着天空,不要对着最暗的地方.要去抓中间值。 2、因为机器为方便后期,自动曝光会欠曝,导致灰蒙蒙的,白的不白,黑的不黑。 所以,遇到白色要加曝光,遇到黑色要减曝光!3.依照你拍的题材,善用测光模式(权衡测光.点测光.中央重点测光...)。 4.若遇到测光抓不准的时候,请用AE lock 对身边灰色的东西曝光锁定后再来拍摄。 5。 对于M档,测光无效,但是会影响液晶屏直方图信息提示。 手动测光:1. 寻找画面中接近18%灰的区块。 当拍摄经验逐渐累积之后.我们就很容易在一个画面中找出接近18%反光率的地方.它可能是监天.可能是大太阳下的柏油路面.可能是青绿的草丛,也可能是没有粉刷过的墙面。 经验可以帮助我们确认进行点测光的地方.应当多多拍摄.然后观察结果并修正自己的判断。 2.使用灰卡或是手掌来测光如果判断中间调的经验不足或是环境混乱.可以直接将灰卡置于环境光源下,直接对着它来测光。 如果没有灰卡.可以用自己的手掌来取代。 人的肤色接近18%的灰调.所以自己的手其实就是一张很好用的灰
卡。 不过要记得别用被太阳晒得很黑的手背.那样会影响测光结果。 曝光的准确:拍摄时,准确的曝光是获取高质量影像的关键。 后期软件来弥补曝光不正确的失误,但很难达到满意的效果。 曝光准确的影像,影调自然,颜色饱和、鲜艳;曝光不足,影像晦暗,暗部层次损失严重;曝光过度,影像的高光部分没有层次。 1、逆光拍摄,但不追求剪影效果可以使用反光板或闪光灯对主体进行补光,如与被摄体距离太远而导致无法使用反光板或闪光灯进行补光时,可以使用点测光功能对主体进行精确测光,也可以使用测光表走近主体进行入射光测量。 2、被摄主体处于大面积白色背景前由于大面积白色或浅色背景会严重影响测光表的准确性,在这种情况下,我们可以选择同方向、同等光线亮度的其它中灰色为主的物体来进行测光,如实在找不到参照物,则可以适当增加曝光补偿,至于增加多少曝光量,要看现场拍摄时白色背景所占比例的大小和光线反差的强弱来确定,一般会在1-2 级之间。 3、拍摄黑色背景前的小物体当被摄体处于黑色或深色背景时,由于黑色或深色的背景会吸收大量的光线,如果使用平均测光模式或多区测光模式都会导致曝光严重过度,应使用点测光模式对主体进行测光,如相机没有点测光功能,则可以使用曝光负补偿来解决问题,一般来说,随光线照射到主体上的强弱来决定曝光补偿值。