三洋驱动器选型手册
富士伺服电机选型计算资料
附录 ■容量选择计算■电脑编程器■参数表
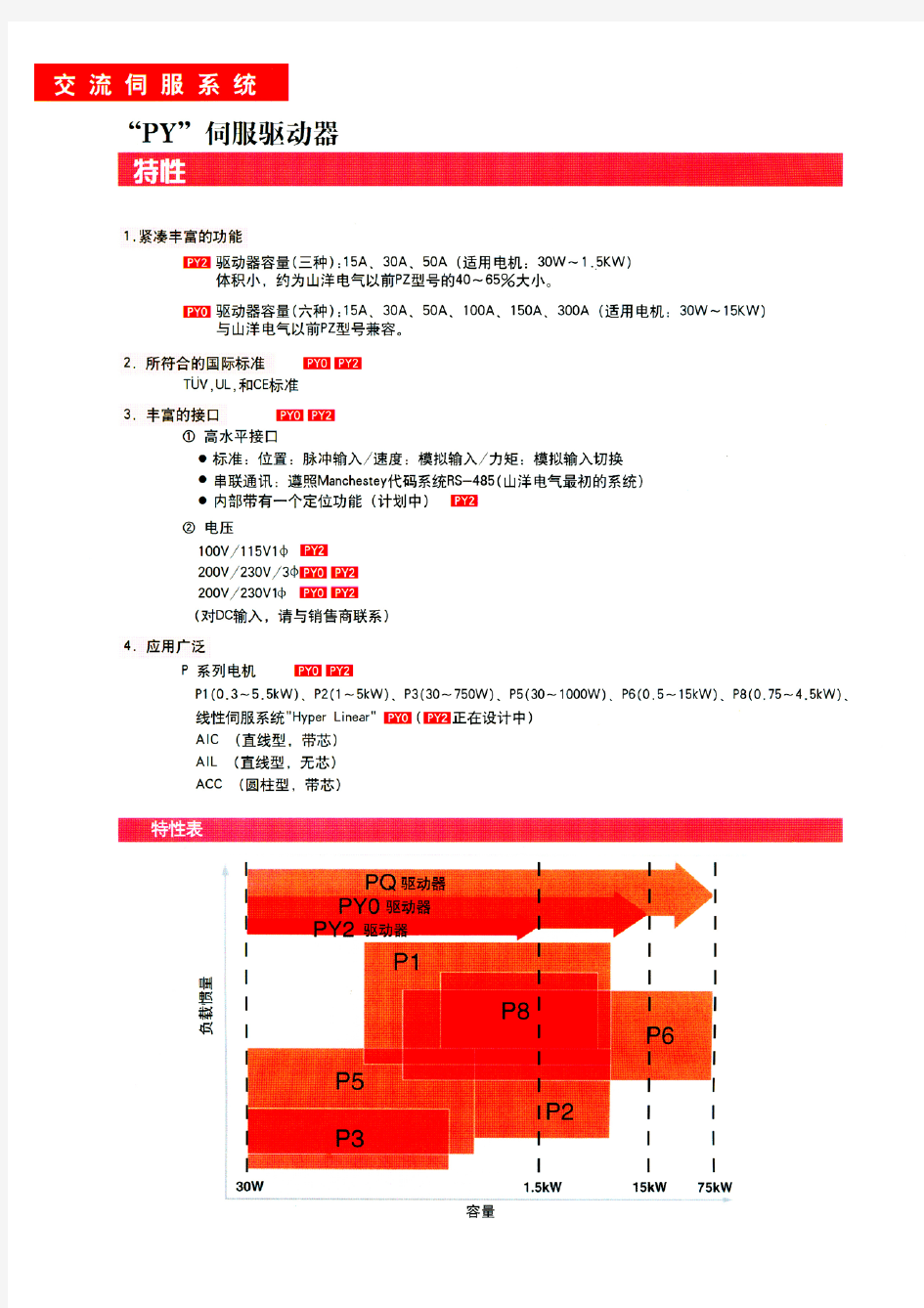
附 附录 容量选择计算 (1) 机械系统的种类 用可变速电机驱动的机械系统,一般有以下几类。 机构特点 滚珠丝杠(直接连接) 用于距离较短的高精度定位。 电机和滚珠丝杠只用联轴节连接,没有间隙。 滚珠丝杠(减速) 选择减速比,可加大向机械系统传递的转矩。 由于产生齿轮侧隙,需要采取补偿措施。 齿条和小齿轮 用于距离较长的(台车驱动等)定位。小齿轮转 动一圈包含了π值,因此需要修正。 同步皮带(传送带) 与链条比较,形态上的自由度变大。 主要用于轻载。皮带轮转动一圈的移动量中包含π 值,因此需要修正。 将伺服系统用于机械系统中时,请注意以下各点。 ①减速比 为了有效利用伺服电机的功率,应在接近电机的额定速度(最高旋转速度)数值的范围使用。在最高旋 转速度下连续输出转矩,还是比额定转矩小。 ②预压转矩 对丝杠加预压力,刚性增强,负载转矩值增大。 由预压产生的摩擦转矩,请参照滚珠丝杠规格书。 ③保持转矩 升降机械在停止时,伺服电机继续输出保持力。 在时间充裕的场合,建议使用保持制动。
附-2
附录附 机构特点 链条驱动 多用于输送线上。必须考虑链条本身的伸长并采取相应的措施。在减速 比比较大的状态下使用,机械系统的移动速度小。 进料辊 将板带上的材料夹入辊间送出。 由于未严密确定辊子直径,在尺寸长的物件上将产生误差,需进行π补 偿。 如果急剧加速,将产生打滑,送出量不足。 转盘分度 转盘的惯性矩大,需要设定足够的减速比。 转盘的转速低,多使用蜗轮蜗杆。 主轴驱动 在卷绕线材时,由于惯性矩大,需要设定够的减速比。 在等圆周速度控制中,必须把周边机械考虑进来研究。
西门子伺服电机选型手册
西门子伺服电机选择手册,SINAMICS S120是一种集V/F、矢量控制和伺服控制于一体的新型驱动控制系统。普通异步电动机不能控制转矩,也不能控制三相异步电动机。 S120系列驱动与伺服电机选型手册第1部分:典型结构的多轴驱动控制单元电机模块与通用直流母线电源模块。带起动机(或scout)和SIMATIC manager软件或s7-300400的书本式柜式PC典型配置图,SIMOTION O/D/P 24 V DL说明:1:主控制模块cu320 2:电源模块SIM 或ALM+24 V电源3:单轴电机模块4:两轴电机模块234电源线终端模块驱动Cliq编码器反馈信号线选项板电抗器功率滤波器传感器模块无编码器电机运动控制,带drivc Cliq接口西门子(中国)自动化传动集团有限公司生产机械SINAMICS S120系列,选自《S120驱动与伺服电机选型手册》第1章多轴传动概述。Sinamics120是一种集V/F、矢量控制和伺服控制于一体的新型驱动控制系统。它不仅可以控制普通的三相异步电动机,还可以控制步进电动机、转矩电动机和直线电动机。其强大的定位功能将实现进给轴的绝对和相对定位。2007年6月发布的DCC(drive control chart)功能将实现逻辑、计算和简单处理功能。SINAMICS S120产品包括:用于普通直流母线的DCAC逆变器和用于单轴的ACAC逆变器。具有公共直流母
线的DC/AC逆变器也称为多轴驱动。它的结构是电源模块和机器模块分开。电源模块将三个交流电整流成540V或600DC,并将电机模块(一个或多个)连接到直流母线。特别适用于多轴控制,特别适用于造纸、包装、纺织、印刷、钢铁等行业。优点是电机轴间能量共享,接线方便简单●单轴控制交流变频器,俗称单轴交流传动,其结构是功率模块和电机模块的组合,特别适合单轴速度和定位控制。本书第一部分包括第1至4章,主要介绍多轴交流传动。第二部分包括第五章至第八章,主要介绍单轴交流传动。第三部分包括第九章,主要介绍电机电缆和信号电缆。第四部分包括第10章,介绍了同步和异步伺服电机的指令数据。第五部分,包括第11章,简要介绍了运动控制系统的指令数据。这本书中的技术资料基本上是英文的。详情请参阅英文原文。西门子(中国)有限公司自动化与传动集团运动控制部生产的机械系列S120系列,源自《S120驱动与伺服电机选型手册》第二章。功率模块是我们通常所说的整流器或整流器/反馈单元。它将三相交流电整流成直流电,并为每个抑制模块(通常称为逆变器)供电。具有反馈功能的模块还可以向电网提供直流电。根据是否有反馈功能和反馈方式,将功率模块分为以下三类:基本线路模块:整流单元,但无反馈功能。智
菲仕伺服电机选型样本
Type U301.20.30.94Nm 1.18Nm 2000Rpm 2500Rpm 0.45A 0.57A 0.20Kw 2.30Nm/A 139V/Krpm 133Hz 118.34Ohm 120.80mH -V 370V 0.13mkgm2 2.2kg 2.9kg U301.60.30.95Nm 1.39Nm 6000Rpm 7400Rpm 1.30A 2.00A 0.60Kw 0.48Nm/A 29V/Krpm 400Hz 10.17Ohm 14.53mH -V 372V 0.13mkgm2 2.2kg 2.9kg U302.20.3 2.00Nm 2.48Nm 2000Rpm 2500Rpm 0.98A 1.19A 0.42Kw 2.30Nm/A 139V/Krpm 133Hz 41.30Ohm 59.20mH -V 371V 0.194mkgm2 2.7kg 3.4kg U302.50.3 2.00Nm 2.60Nm 5000Rpm 6000Rpm 2.00A 2.60A 1.05Kw 1.09Nm/A 66V/Krpm 333Hz 8.51Ohm 14.55mH -V 333V 0.194mkgm2 2.7kg 3.4kg U304.10.3 3.90Nm 3.95Nm 1000Rpm 1500Rpm 1.00A 1.10A 0.41Kw 3.95Nm/A 239V/Krpm 67Hz 87.44Ohm 120.36mH -V 380V 0.156mkgm2 4.5kg 5.2kg U304.20.3 4.18Nm 4.91Nm 2000Rpm 2500Rpm 2.00A 2.36A 0.88Kw 2.29Nm/A 139V/Krpm 133Hz 15.85Ohm 29.58mH -V 371V 0.156mkgm2 4.5kg 5.2kg U304.50.2 3.95Nm 4.00Nm 5000Rpm 7500Rpm 10.00A 10.00A 2.07Kw 0.43Nm/A 26V/Krpm 333Hz 0.48Ohm 1.40mH 201V -V 0.156mkgm2 4.5kg 5.2kg U304.50.3 3.95Nm 4.00Nm 5000Rpm 7500Rpm 5.50A 6.10A 2.07Kw 0.73Nm/A 44V/Krpm 333Hz 1.40Ohm 4.10mH -V 344V 0.156mkgm2 4.5kg 5.2kg U503.20.3 3.80Nm 4.42Nm 2000Rpm 2628Rpm 1.65A 1.80A 0.80Kw 2.28Nm/A 138V/Krpm 133Hz 16.88Ohm 63.67mH -V 338V 0.97mkgm2 4.8kg 5.8kg U503.30.3 3.00Nm 3.50Nm 3000Rpm 3200Rpm 2.20A 2.56A 0.94Kw 1.36Nm/A 82V/Krpm 200Hz 7.01Ohm 31.60mH -V 374V 0.97mkgm2 4.8kg 5.8kg U503.40.3 2.80Nm 3.50Nm 4000Rpm 6000Rpm 3.20A 4.30A 1.17Kw 0.93Nm/A 56V/Krpm 267Hz 3.30Ohm 9.00mH -V 375V 0.97mkgm2 4.8kg 5.8kg U503.50.3 2.00Nm 3.50Nm 5000Rpm 5200Rpm 2.20A 3.80A 1.05Kw 1.00Nm/A 61V/Krpm 333Hz 3.14Ohm 14.30mH -V 376V 0.97mkgm2 4.8kg 5.8kg U505.20.3 5.08Nm 5.30Nm 1500Rpm 2244Rpm 2.00A 2.10A 0.80Kw 2.71Nm/A 164V/Krpm 133Hz 13.96Ohm 56.43mH -V 295V 1.13mkgm2 5.7kg 6.7kg U505.30.2 3.50Nm 5.00Nm 3000Rpm 4000Rpm 6.00A 7.00A 1.10Kw 0.65Nm/A 39V/Krpm 200Hz 0.97Ohm 2.94mH 170V -V 1.13mkgm2 5.7kg 6.7kg U505.40.3 4.00Nm 5.52Nm 4000Rpm 4800Rpm 4.20A 4.30A 1.68Kw 1.36Nm/A 82V/Krpm 267Hz 3.65Ohm 14.05mH -V 372V 1.13mkgm2 5.7kg 6.7kg U506.20.3 6.44Nm 7.34Nm 2000Rpm 2568Rpm 2.90A 3.30A 1.35Kw 2.32Nm/A 141V/Krpm 133Hz 6.92Ohm 31.04mH -V 322V 1.13mkgm2 6.8kg 7.8kg U506.20.2 5.70Nm 7.62Nm 2000Rpm 2500Rpm 4.40A 5.87A 1.19Kw 1.36Nm/A 82V/Krpm 133Hz 2.12Ohm 9.68mH 180V -V 1.13mkgm2 6.8kg 7.8kg U506.30.3 5.50Nm 6.63Nm 3000Rpm 3200Rpm 3.53A 4.24A 1.73Kw 1.56Nm/A 94V/Krpm 200Hz 3.37Ohm 20.60mH -V 349V 1.13mkgm2 6.8kg 7.8kg U506.30.2 5.80Nm 7.62Nm 3000Rpm 4000Rpm 8.53A 13.96A 1.82Kw 0.68Nm/A 41V/Krpm 200Hz 0.65Ohm 2.42mH 175V -V 1.13mkgm2 6.8kg 7.8kg U506.40.3 4.50Nm 5.87Nm 4000Rpm 5000Rpm 3.20A 4.80A 1.88Kw 1.29Nm/A 78V/Krpm 267Hz 2.25Ohm 9.79mH -V 375V 1.13mkgm2 6.8kg 7.8kg U509.30.2 6.60Nm 9.20Nm 3000Rpm 4000Rpm 8.50A 12.40A 2.07Kw 0.85Nm/A 51V/Krpm 200Hz 0.54Ohm 2.03mH 211V -V 1.33mkgm28.8kg 9.8kg U509.20.39.16Nm 10.40Nm 2000Rpm 2378Rpm 3.70A 4.05A 1.92Kw 2.55Nm/A 154V/Krpm 133Hz 4.83Ohm 25.77mH -V 346V 1.33mkgm28.8kg 9.8kg U509.40.3 6.00Nm 9.98Nm 4000Rpm 4200Rpm 4.00A 8.00A 2.51Kw 1.28Nm/A 77V/Krpm 267Hz 1.12Ohm 7.74mH -V 378V 1.33mkgm28.8kg 9.8kg U512.20.311.24Nm 13.18Nm 2000Rpm 2473Rpm 4.80A 5.50A 2.35Kw 2.52Nm/A 153V/Krpm 133Hz 2.97Ohm 17.29mH -V 334V 1.42mkgm210.8kg 11.8kg U512.40.3 6.00Nm 12.84Nm 2500Rpm 4500Rpm 5.00A 11.00A 1.57Kw 1.22Nm/A 74V/Krpm 267Hz 0.80Ohm 5.27mH -V 378V 1.42mkgm210.8kg 11.8kg U710.10.3 6.40Nm 7.80Nm 1000Rpm 1500Rpm 1.50A 1.90A 0.67Kw 4.33Nm/A 262.08V/Krpm 67Hz 18.90Ohm 90.20mH -V 373V 0.73mkgm28.5kg 11.5kg U710.40.39.60Nm 10.50Nm 4000Rpm 4100Rpm 6.70A 6.70A 4.02Kw 1.58Nm/A 95.63V/Krpm 267Hz 1.99Ohm 10.73mH -V 391V 0.73mkgm28.5kg 11.5kg U710.50.3 5.89Nm 8.98Nm 5175Rpm 5300Rpm 5.35A 8.60A 3.19Kw 1.10Nm/A 66.58V/Krpm 333Hz 1.03Ohm 8.10mH -V 375V 0.73mkgm28.5kg 11.5kg U715.35.312.35Nm 12.74Nm 3500Rpm 5000Rpm 7.10A 7.70A 4.53Kw 1.74Nm/A 105.32V/Krpm 233Hz 1.38Ohm 12.08mH -V 394V 1.0mkgm210.2kg 13.2kg U715.50.2 6.00Nm 12.00Nm 4500Rpm 5000Rpm 10.00A 21.60A 2.83Kw 0.62Nm/A 37.53V/Krpm 333Hz 0.14Ohm 1.53mH 174V -V 1.0mkgm210.2kg 13.2kg U720.05.316.80Nm 18.40Nm 500Rpm 800Rpm 2.00A 2.20A 0.88Kw 9.20Nm/A 556.85V/Krpm 33Hz 26.90Ohm 193.60mH -V 330V 1.3mkgm211.9kg 14.9kg U720.15.317.00Nm 19.00Nm 1500Rpm 1800Rpm 5.73A 6.44A 2.67Kw 3.29Nm/A 199.13V/Krpm 100Hz 2.88Ohm 31.24mH -V 371V 1.3mkgm211.9kg 14.9kg U720.20.311.70Nm 16.00Nm 2000Rpm 2500Rpm 5.09A 6.61A 2.45Kw 2.53Nm/A 153.13V/Krpm 133Hz 2.33Ohm 14.88mH -V 322V 1.3mkgm211.9kg 14.9kg U720.30.216.00Nm 19.00Nm 3000Rpm 4000Rpm 16.50A 20.67A 5.03Kw 0.99Nm/A 59.92V/Krpm 200Hz 0.36Ohm 3.96mH 204V -V 1.3mkgm211.9kg 14.9kg U720.30.316.80Nm 16.80Nm 3000Rpm 3700Rpm 11.80A 11.80A 5.28Kw 1.59Nm/A 95.94V/Krpm 200Hz 0.67Ohm 5.70mH -V 291V 1.3mkgm211.9kg 14.9kg U720.40.312.40Nm 17.79Nm 4000Rpm 4800Rpm 10.50A 15.19A 5.19Kw 1.28Nm/A 77.47V/Krpm 267Hz 0.55Ohm 3.90mH -V 319V 1.3mkgm213.6kg 16.6kg U725.50.214.00Nm 23.16Nm 4500Rpm 5000Rpm 20.00A 37.95A 6.60Kw 0.67Nm/A 40.55V/Krpm 333Hz 0.08Ohm 1.03mH 176V -V 1.6mkgm213.6kg 16.6kg U730.15.322.00Nm 23.80Nm 1500Rpm 2000Rpm 7.50A 8.00A 3.46Kw 3.22Nm/A 194.90V/Krpm 100Hz 2.00Ohm 20.06mH -V 317V 1.9mkgm215.2kg 18.2kg U730.20.322.00Nm 23.00Nm 2000Rpm 2150Rpm 8.50A 9.70A 4.61Kw 2.65Nm/A 160.40V/Krpm 133Hz 2.00Ohm 23.20mH -V 345V 1.9mkgm215.2kg 18.2kg U730.30.316.90Nm 26.60Nm 3000Rpm 3200Rpm 11.60A 18.90A 5.31Kw 1.52Nm/A 92.00V/Krpm 200Hz 0.38Ohm 3.50mH -V 287V 1.9mkgm215.2kg 18.2kg U740.05.324.00Nm 42.00Nm 500Rpm 800Rpm 2.50A 5.23A 1.26Kw 9.00Nm/A 544.74V/Krpm 33Hz 10.30Ohm 96.50mH -V 314V 2.4mkgm218.5kg 21.5kg U740.20.324.00Nm 34.00Nm 2000Rpm 2180Rpm 7.08A 13.48A 5.03Kw 2.72Nm/A 164.63V/Krpm 133Hz 0.80Ohm 8.04mH -V 327V 2.4mkgm218.5kg 21.5kg U740.30.321.80Nm 33.00Nm 3000Rpm 3200Rpm 14.00A 21.70A 6.85Kw 1.63Nm/A 98.66V/Krpm 200Hz 0.29Ohm 3.00mH -V 304V 2.4mkgm218.5kg 21.5kg We reserve the right to make technical changes. ULTRACT III Stand-still Weight (without Nominal Inductance Max Nominal Torque power Frequency Constant still speed torque brake)phase Weight (with brake)current Winding Stand-Back EMF between Nominal torque Nominal current Nominal speed Winding Resistance Rotor Inertia 400VAC Nominal Voltage (Supply Voltage)230VAC
新力川伺服驱动使用说明
感谢您使用本产品,本使用操作手册提供LCDA系列伺服驱动器的相关信息。内容包括: ●伺服驱动器和伺服电机的安装与检查 ●伺服驱动器的组成说明 ●试运行操作的步骤 ●伺服驱动器的控制功能介绍与调整方法 ●所有参数说明 ●通讯协议说明 ●检测与保养 ●异常排除 ●应用例解说 本使用操作手册适合下列使用者参考: ●伺服系统设计者 ●安装或配线人员 ●试运行调机人员 ●维护或检查人员 在使用前,请您仔细详读本手册以确保使用上的正确。此外,请将它妥善保存在安全的地点以便随时查阅。下列在您尚未读完本手册时,务必遵守事项: ●安装的环境必须没有水气,腐蚀性气体或可燃性气体。 ●接线时,禁止将三相电源接至马达U、V、W的连接器,因为一旦接错 时将损坏伺服驱动器。 ●接地工程必须确实实施。 ●在通电时,请勿拆解驱动器、马达或更改配线。 ●在通电动作前,请确定紧急停机装置是否随时开启。 ●在通电动作时,请勿接触散热片,以免烫伤。 如果您在使用上仍有问题,请洽询经销商或者本公司客服中心。
安全注意事项 LCDA 系列为一开放型(Open Type )伺服驱动器,操作时须安装于遮蔽式的控制箱内。本驱动器利用精密的回授控制与结合高速运算能力的数字信号处理器(Digital Signal Processor,DSP ),控制IGBT 产生精确的电流输出,用来驱动三相永磁式同步交流伺服马达(PMSM )达到精准定位。 LCDA 系列可使用于工业应用场合上,且建议安装于使用手册中的配线(电)箱环境(驱动器、线材与电机都必须安装于符合环境等级的安装环境最低要求规格)。 在按收检验、安装、配线、操作、维护与检查时,应随时注意以下安全注意事项。 标志[危险]、[警告]与[禁止]代表的含义: ? 意指可能潜藏危险,若未遵守要求可能会对人员造成严 重伤或致命 ? 意指可能潜藏危险,若未遵守可能会对人员造成中度的 伤害,或导致产品严重损坏,甚至故障 ? 意指绝对禁止的行动,若未遵守可能会导致产品损坏, 或甚至故障而无法使用
交流伺服驱动器用户手册2
1.SA系列交流伺服简介 SA系列数字式交流永磁同步电机伺服驱动器(以下简称伺服驱动器)采用了国际上先进的DSP 芯片(数字信号处理器)对电机的位置、转速、转矩进行数字化智能控制。该伺服驱动器不仅可靠性高、性能优异,而且可以通过设定用户参数,对系统进行任意组态。例如:可以组成位置控制系统、速度控制系统、转矩控制系统等。 1.1SA系列交流伺服的使用方法 1.1.1 速度控制方式 速度控制方式的伺服驱动器标准使用方法,如下图所示: 如上图所示,在上位机侧组成位置控制环。在上位机中,进行位置指令和位置反馈的比较操作,即进行位置环调节的计算,输出模拟速度指令给伺服驱动器。 伺服驱动器接收上位机的模拟速度指令,进行速度环控制。 在这种控制方式下,上位机的位置反馈可以是伺服驱动器输出的电机编码器信号,也可以是安装在机械上的直线位置测量信号(例如光栅尺、磁栅尺、感应同步器等),即可以组成位置全闭环系统。 1.1.2 位置控制方式 位置控制方式的伺服驱动器标准使用方法,如下图所示: 1
上位机进行完定位及插补计算后,将位置指令以脉冲串的形式传送给伺服驱动器,由伺服驱动器进行位置指令和位置反馈的比较操作,即进行位置环调节的计算。这种形式的伺服驱动器包含了位置控制环。 作为位置指令的脉冲串,可以是下面的任一种,在伺服驱动器侧可以通过设定用户常数进行选择: 1)符号位+脉冲列 2)具有90°相位差的两相脉冲序列 3)正转脉冲序列+ 反转脉冲序列 1.2 SA系列交流伺服驱动器的内置功能 SA系列伺服控制器的内置功能说明如下: 1)控制方式转换 通过数字操作器设定用户常数,可以使伺服驱动器工作于位置控制方式或速度控制方式。为了防止误操作,在伺服电机运行时(伺服使能状态),不能改变控制方式。2)再生能量处理功能 伺服驱动器内置再生能量处理电路和再生制动电阻。当伺服电机起制动频繁或负载惯量过大时,则必须使用外置再生制动电阻。 3)能耗制动功能 在伺服驱动器断电、伺服驱动器故障时,电机处于不受控状态。能耗制动功能可以使电机处于能耗制动状态,使电机马上停止,避免机械部件受损。 4)双电子齿轮功能 为满足机械加工的需要,伺服驱动器内置有双电子齿轮功能,即通过外部触点信号来切换第一电子齿轮比和第二电子齿轮比。 5)位置信号输出功能 伺服驱动器将光电编码器信号经长线驱动器输出,可以用作上位机的位置反馈信号。 6)内部速度指令功能 伺服驱动器可以通过外部接点选择内部预置的四种速度。
交流伺服电机选型手册范本
ST系列交流伺服电机型号编号说明 1: 表示电机外径,单位:mm。 2:表示电机是正弦波驱动的永磁同步交流伺服电机。 3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。 4:表示电机零速转矩,其值为三位数×,单位:Nm。 5:表示电机额定转速,其值为二位数×100,单位:rpm。 6:表示电机适配的驱动器工作电压,L—AC220V,H—AC380V。 7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T),R—1对极旋转变压器。 8:表示电机类型,B—基本型。 9:表示电机安装了失电制动器。 SD系列交流伺服驱动器型号编号说明 1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器 2:表示IPM模块的额定电流(15/20/30/50/75A) 3:表示功能代码(M:数字量与模拟量兼容) ●交流伺服电机与伺服驱动器适配表 ST系列电机主要参数 适配驱动器 ST系列电机ST系列电机 电机型号额定转矩: 额定转速 额定功率外形尺寸零售价(元) 110ST-M02030 2 Nm3000rpm SD15M SD20MN SD30MN SD50MN SD75MN 】 110×110×158 1500 110ST-M04030 4 Nm3000rpm110×110×1851700 110ST-M05030@ 5 Nm 3000rpm110×110×2001800 110ST-M06020 6 Nm2000rpm110×110×2171900 110ST-M06030 6 Nm3000rpm110×110×2171900 & 130ST-M04025 4 Nm2500rpm130×130×1631800 130ST-M0502 5 5 Nm2500rpm< 130×130×1712100 130ST-M06025 6 Nm2500rpm130×130×181( 2400
DA98伺服驱动器说明书
第一章概述 1.1 产品简介: 交流伺服技术自九十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷馐机械、纺织机械、自动化生产线等自动化领域。 DDA98交流伺服系统系国产第一代全数字交流伺服系统,采用国际最新数字信号处理DSP)、大规模可编程门阵列(CPLD)和MISUBISHI智能化功率模块(IPM),集成度高、体积小、保护完善、可靠性好、彩最何必PID算法完成PWM控制,性能已达到国外同类产品的水平。 与步进系统相比,DA98交流伺服系统具有以下优点 ●避免失步现象 伺服电机自带编码器,位置信号反馈至伺服 驱动器,与开环位置控制器一起构成半闭环 控制系统。 ●宽速比、恒转矩 调速比为1:5000,从低速到高速都具有稳 定的转矩特性。 ●高速度、高精度 伺服电机最高转速可达3000rpm,回转定位 精度1/10000r。 〖注〗不同型号伺服电机最高转速不同。 ●控制简单、灵活 通过修改参数可对伺服系统的工作方式、运 行特性作出适当的设置,以适应不同的要求。
1.2 到货检查 1)收货后,必须进行以下检查: (1) 包装箱是否完好,货物是否因运输受损? (2) 核对伺服驱动器和伺服电机铭牌,收到货物是否确系所订货物? (3) 核对装箱单,附件是否齐全? 2)型号意义: (1) 伺服驱动器型号 (示出华中理工大学电机厂STZ 系列) ※1 (04、06……23)对应0.4~2.3KW ※2 ※1:可选配其它国产、进口伺服电机,需订货。驱动器缺省参数仅适配STZ 系列伺服电机, 选配其它伺服电机时,出厂参数已备份在EEPROM 区。恢复出厂参数时应执行恢复备份,不可执行恢复缺省参数操作。 ※2:中小功率(小于等于1.5KW )为标准配置,中功率(大于1.5KW 、小于等于2.3KW )采用 加厚散热器。 〖注〗产品出厂时,上面填写框已按产品型号填写好,请用户与产品铭牌核对。 (2) 伺服电机型号 DA98交流伺服驱动器可与国内外多款伺服电机配套,由用户订货时选择。本手册按华中电机厂生产的伺服电机进行描述,其它型号伺服电机有关资料随伺服电机提供。 光电编码器反馈 电机工作电压H :300V L :200V 额定转速级别 1:低速(1500/2000rpm ) 2:高速(2500/3000rpm ) 零速转矩2、4、5、6、7.5、10…N.m 正弦波驱动伺服电机 电机外径 110:110×110mm 130:130×130mm
伺服电机选型手册
博美德乮广州乯数控设备有限公司联系人丗付先生电话丗134******** BONMET SA Smart & Accurate BONMET SERVO SYSTEM 性能卓越●多合一控制方式 利用参数切换可分别使用:①位置控制;②速 度控制;③转矩控制;④JOG控制;⑤点对点 控制。 ●单轴定位功能
SA系列伺服驱动器内置了16节点的单轴定位功能,用户可以通过伺服驱动器的RS-232通 讯接口直接与触摸屏连接,从而省却了中间的PLC单元。 ●伺服系统分析功能 博美德伺服驱动器专用计算机软件Servofly,能对所有参数进行编辑、传送、比 较以及初始化,监控所有信号、报警、系统状态等,功能强大,操作便捷。 种类齐全●与机器匹配的伺服电机种类齐全 博美德伺服电机现在拥有27种不同型号,适 用面广泛,并且我们仍在不断开发新型产品。 ●多种配套类型伺服驱动器 博美德伺服驱动器拥有SA系列和SL系列2 个系列,现已涵盖0.4KW至5.5KW的多种类型驱动器,广泛运用于各种工业环境。 质量保证●伺服电机 选用高工作温度、高磁能积优质的永磁材料做成,使用优化的电磁参数设计,电机长期运行
时仍能保持优良的工作状态,IP65的防护等 级,特别适用于工业环境。 ●伺服驱动器 采用德国进口模块,专业的系统设计,先进的 PID控制算法,能与电机参数实现无缝联接, 使产品性能达到最佳效果。●控制软件 ●型号说明 ●适配类型 ●SM系列伺服电机●ML系列一体机 ●伺服驱动器规格●伺服驱动器连接图●伺服产品选件Contents ● 控制软件—Servofly Servofly 是Bonmet Motion GmbH 独立研 发的 SA
KINCO ED系列伺服驱动器使用手册
KINCO? ED系列伺服驱动器 使用手册 2005年10月 深圳市步进科技有限公司 Step Servo (Shenzhen) Ltd.
目录 目 录 第一章 ED系列伺服驱动器功能及构成 (5) 1.1功能 (5) 1.2构成 (6) 第二章 安装与使用事项 (7) 2.1使用环境 (7) 2.2安装间距和方向 (7) 2.3防止异物进入 (7) 2.4编码器电缆安装 (7) 2.5使用事项 (7) 2.5.1 使用原则 (7) 2.5.2 使用环境 (8) 2.5.3 安装要求 (8) 2.5.4 电气连接前要求 (8) 2.5.5 操作 (8) 第三章 接口信号与接线 (9) 3.1ED系列驱动器型号 (9) 3.2ED系列驱动器接口 (9) 3.2.1 ED100系列驱动器 (9) 3.2.2 ED200/ED216/ECOLIN200/ECOLIN216系列驱动器 (11) 3.2.3 驱动器接口功能介绍 (12) 3.3驱动器内部接线 (12) 3.3.1 ED100驱动器内部接线 (12) 3.3.2 ED200驱动器内部接线 (15) 3.4接线 (17) 3.4.1 电源模块P200 AA/BA接线 (17) 3.4.2 ED驱动器和电源模块P200 AA/BA接线 (18) 3.4.3 EMC安装 (19) 3.4.4 ED驱动器和PLC接口接线 (20) 3.4.5 ED驱动器最小配置硬件接线 (21) 3.4.6 ED 驱动器和电机连线 (22) 第四章 ECO2WIN软件使用说明 (24) 4.1软件安装 (24) 4.2快速入门 (26) 4.2.1 ED运行所需的最低硬件要求 (26) 4.2.2建立一个新的工程文件 (26) 4.2.3 打开一个工程文件 (31) 4.2.4 主窗体介绍 (31) 4.2.5 导入和导出系统文件 (35) 第五章 ECO2WIN基本功能介绍 (36)
伺服电机和减速机选型
1)确认你的负载额定扭矩要小于减速机额定输出扭矩。 2)伺服电机额定扭矩(乘以)x减速比要大于负载额定扭矩。 3)负载通过减速机转化到伺服电机的转动惯量,要在伺服电机允许的范围内。 4)确认减速机精度能够满足您的控制要求。 5)减速机结构形式,外型尺寸既能满足设备要求,同时能与所选用的伺服电机连接。 除了减速机传动比,输出转矩,输出轴的轴向力,径向力校核;还要看减速机的传动精度,根据工作条件选择。因为传动精度高价格高,只要电机和减速机配套后满足你的要求(功能和性能),就可以了。 配减速机可以提高扭矩,但是速度下降,所以是否配减速机要综合考虑速度及扭矩两个方面,如移载机上,常见的有以下两种驱动方式:(通过计算得到伺服电机的功率大致合理的范围,不能造成浪费,所以两种驱动方式的电机功率相差不大) A:靠滚珠丝杆传动,伺服电机不配减速机的情况下扭矩就可以满足要求,速度也能满足;配减速机后扭矩的就更大了(造成浪费),但是速度却不能满足,所以一般不配减速机; 伺服电机选型: 转速(根据需要选择) 转矩(根据负载结构和重量以及转速计算需要伺服电机需要输出的力矩) 转动惯量(此参数关系伺服在机械结构上的运行精度,通过负载结构重量计算) 一般都要留有一定余量,即安全系数。 通过此三个参数结合选型样本来选择伺服电机的型号。 减速机选型: 减速比(根据电机的转速与最终需要输出的转速之比以及最终需要输出的转矩与电机转矩之比以及机械转动惯量与电机的转动惯量之比的开方来最终确定) 额定承载扭矩(最终的输出扭矩不要大于减速机的额定扭矩,与减速机寿命有关) 精度(根据用户需要选择适当的精度要求) 安装配合尺寸(负载与减速机之间的配合安装以及电机与减速机之间的配合安装等根据产品图纸来确定) 上述便是如何选伺服电机和减速机的一般要确定的参数。希望帮助到你。 减速机扭矩=9550×电机功率÷电机功率输入转数×速比×使用系数 这里的使用系数怎么确定,大概的怎么确定,选的值与实际偏离的不会太多! D KF系列精密伺服减速机 时间: 2016-08-16 16:21 点击: 4132 次
天虹伺服驱动器说明书.
永磁同步电机驱动器用户手册 THSR-A/B系列
永磁同步电机驱动器用户手册 -I-目录 一.安装 (1) 1.装时注意事项 (1) 2.环境条件 (1) 二.产品型号对照 (2) 1.伺服驱动器铭牌说明 (2) 2.驱动器型号说明 (2) 三.驱动器外观及面板说明 (3) 四.伺服驱动器尺寸图 (6) 五.伺服电机尺寸图 (8) 六.伺服驱动器与伺服电机搭配对照表 (10) 七.驱动器使用电线规格 (11) 八.控制信号标准接线图 (12) 九.驱动器端子说明 (14) 十.伺服驱动器信号输入输出回路图 (17) 十一.驱动器接线方式 (18) 1.绣花机主轴 (19) 2.绣花机移框 (20) 3.绣花机D轴 (21) 4.绣花机H轴 (22) 十二.参数表 (23) 十三.驱动器异常报警 (24) 附录:主轴/移框参数快速设置 (26) 主轴参数快速设置 (26) 移框参数快速设置 (26)
永磁同步电机驱动器用户手册一. 安装 1.装时注意事项 1)驱动器与电机连线勿拉紧;电源线与控制信号线分开走线,有 30cm的间距,这样可以减小电源对信号线的干扰; 2)接线时,禁止将三相电源接至U、V、W端子上; 3)确保接地良好; 4)电机轴心必须与设备轴心对心良好; 5)通电时,请勿拆卸驱动器、电机、或更改配线; 6)通电运行时,请勿接触散热片,以免烫伤 2.环境条件 本产品驱动器使用环境温度为0°C ~ 50°C。若环境温度超过45°C 以上时,请置于条件通风良好的场所。长时间的运转建议在45°C 以下的环境温度,以确保产品的可靠性能。如果本产品装在配电箱里,那配电箱的大小及通风条件必须让所有内部使用的电子装置没有过热的危险。而且也要注意机器的震动是否会影响配电箱的电子装置。除此之外,使用的条件也包括: ▲无发高热装置的场所; ▲无水滴、蒸气、灰尘及油性灰尘的场所; ▲无腐蚀、易燃性的气、液体的场所; ▲无漂浮性的尘埃及金属微粒的场所; ▲坚固无振动的场所; ▲无电磁噪声干扰的场所。 第1页
伺服驱动器使用说明书
MMT- 直流伺服驱动器使用手册济南科亚电子科技有限公司
直流伺服驱动器使用说明书 一、概述: 该伺服驱动器采用全方位保护设计,具有高效率传动性能:控制精度高、线形度好、运行平稳、可靠、响应时间快、采用全隔离方式控制等特点,尤其在低转速运行下有较高的扭矩及良好的性能,在某些场合下和交流无刷伺服相比更能显示其优异的特性,并广泛应用于各种传动机械设备上。 二、产品特征: ◇PWM控制H桥驱动 ◇四象限工作模式 ◇全隔离方式设计 ◇线形度好、控制精度高 ◇零点漂移极小 ◇转速闭环反馈电压等级可选 ◇标准信号接口输入0--±10V ◇开关量换向功能 ◇零信号时马达锁定功能 ◇上/下限位保护功能 ◇使能控制功能 ◇上/下限速度设定 ◇输出电流设定功能 ◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能
三、主要技术参数 ◇控制电源电压AC: 110系列:AC :110V±10% 220系列:AC :220V±10% ◇主电源电压AC: 110系列:AC 40----110V 220系列:AC50---- 220V ◇输出电压DC: 110系列:0—130V或其它电压可设定 220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最大输出电流10A) DC 10A(最大输出电流15A) DC 20A(最大输出电流25A)◇控制精度:0.1% ◇输入给定信号:0—±10V ◇测速反馈电压: 7V/1000R 9.5V/1000R 13.5V/1000R 20V/1000R 可经由PC板内插片选定并可接受其它规格订制四、安装环境要求: ◇环境温度:-5oC ~ +50oC ◇环境湿度:相对湿度≤80RH。(无结露) ◇避免有腐蚀气体及可燃性气体环境下使用
伺服电机的选型计算方法
伺服电机的选型计算方法
2012-4-17 10:51:00 来源:kingservo
1、
伺服电机和步进电机的性能比较
步进电机作为一种开环控制的系统, 和现代数字控制技术有着本质的联系。 在目前国 内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交 流伺服电机也越来越多地应用于数字控制系统中。 为了适应数字控制的发展趋势, 运动控 制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。 虽然两者在控制方 式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。现就二 者的使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为 1.8°、0.9°,五相混合式步进电机步距角一般 为 0.72 °、0.36°。也有一些高性能的步进电机通过细分后步距角更小。如山洋公司 (SANYO DENKI)生产的二相混合式步进电机其步距角可通过拨码开关设置为 1.8°、 0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合 式步进电机的步距角。 交流伺服电机的控制精度由电机轴后端的旋转编码器保证。以京伺服(KINGSERVO) 全数字式交流伺服电机为例,对于带标准 2500 线编码器的电机而言,由于驱动器内部采 用了四倍频技术,其脉冲当量为 360°/10000=0.036°。对于带 17 位编码器的电机而言, 驱动器每接收 131072 个脉冲电机转一圈,即其脉冲当量为 360°/131072=0.0027466°, 是步距角为 1.8°的步进电机的脉冲当量的 1/655。 二、低频特性不同 步进电机在低速时易出现低频振动现象。 振动频率与负载情况和驱动器性能有关, 一 般认为振动频率为电机空载起跳频率的一半。 这种由步进电机的工作原理所决定的低频振 动现象对于机器的正常运转非常不利。 当步进电机工作在低速时, 一般应采用阻尼技术来 克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。 交流伺服电机运转非常平稳, 即使在低速时也不会出现振动现象。 交流伺服系统具有 共振抑制功能,可涵盖机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检 测出机械的共振点,便于系统调整。 三、矩频特性不同 步进电机的输出力矩随转速升高而下降, 且在较高转速时会急剧下降, 所以其最高工 作转速一般在 300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为 2000RPM 或 3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。 四、过载能力不同 步进电机一般不具有过载能力。交流伺服电机具有较强的过载能力。以京伺服 (KINGSERVO)交流伺服系统为例, 它具有速度过载和转矩过载能力。 其最大转矩为额定转 矩的三倍, 可用于克服惯性负载在启动瞬间的惯性力矩。 步进电机因为没有这种过载能力, 在选型时为了克服这种惯性力矩, 往往需要选取较大转矩的电机, 而机器在正常工作期间 又不需要那么大的转矩,便出现了力矩浪费的现象。 五、运行性能不同
维控VD2系列伺服驱动器使用手册
序言 本手册适用于维控VD2系列的伺服驱动器。 为正确使用本系列伺服驱动器设备,请事先认真阅读本手册,并妥善保存以备后用。 在使用过程中,若对本设备的功能及性能方面有存疑的情况,请联系我司的技术人员,以获得相关帮助,顺利的使用本设备。 本公司的产品都在不断的完善和升级中,本手册内容若有变更,恕不另行通知。 本书适用于初、中级读者的入门及使用参考书。同时,本书所有解释权归本公司所有。 由于没有按要求操作造成的危险,可能导致重伤,甚至死亡的情况。 由于没有按要求操作造成的危险,可能导致中度伤害或轻伤,及设备损坏的情况。
目录 第1章安全提醒 (1) 1.1安全注意事项 (1) 1.2保存及搬运的注意事项 (2) 1.3安装时的注意事项 (2) 1.4配线时的注意事项 (3) 1.5运行时的注意事项 (4) 1.6维护和检查时的注意事项 (4) 第2章产品信息 (5) 2.1伺服驱动器产品 (5) 2.1.1伺服驱动器型号命名 (5) 2.1.2伺服驱动器的组成 (7) 2.1.3伺服驱动器的电气规格 (9) 2.2伺服电机产品 (9) 2.2.1伺服电机型号命名 (9) 2.2.2伺服电机的组成 (10) 2.2.3伺服电机的电气规格 (11) 第3章伺服驱动器及电机的安装 (12) 3.1伺服驱动器的安装 (12) 3.1.1尺寸(单位:mm) (12) 3.1.2安装场所 (12) 3.1.3安装环境 (13) 3.1.4安装事项 (13) 3.2伺服电机的安装 (17) 3.2.1尺寸(单位:mm) (17) 3.2.2安装场所 (18) 3.2.3安装环境 (18) 3.2.4安装注意事项 (19) 第4章配线 (20) 4.1主电路配线 (20) 4.1.1伺服驱动器的端子 (20) 4.1.2电源配线的示例图 (22) 4.1.3伺服驱动器与伺服电机动力线连接 (24)
DA 伺服驱动器说明书
第一章 概述 1.1 产品简介: 交流伺服技术自九十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷馐机械、纺织机械、自动化生产线等自动化领域。 DDA98交流伺服系统系国产第一代全数字交流伺服系统,采用国际最新数字信号处理DSP )、大规模可编程门阵列(CPLD )和MISUBISHI 智能化功率模块(IPM ),集成度高、体积小、保护完善、可靠性好、彩最何必PID 算法完成PWM 控制,性能已达到国外同类产品的水平。 与步进系统相比,DA98交流伺服系统具有以下优点 ● 避免失步现象 伺服电机自带编码器,位置信号反馈至伺服 驱动器,与开环位置控制器一起构成半闭环 控制系统。 ● 宽速比、恒转矩 调速比为1:5000,从低速到高速都具有稳 定的转矩特性。 ● 高速度、高精度 伺服电机最高转速可达3000rpm , 回转定位 精度1/10000r 。 〖注〗不同型号伺服电机最高转速不同。 ● 控制简单、灵活 通过修改参数可对伺服系统的工作方式、运 行特性作出适当的设置,以适应不同的要求。 1.2 到货检查 1)收货后,必须进行以下检查: (1) 包装箱是否完好,货物是否因运输受损? (2) 核对伺服驱动器和伺服电机铭牌,收到货物是否确系所订货物? (3) 核对装箱单,附件是否齐全? 2)型号意义: (1) 伺服驱动器型号 DA98 (示出华中理工大学电机厂STZ 系列) ※1
输出功率:两位数字(04、06……23)对应0.4~2.3KW ※2 系列代号 ※1:可选配其它国产、进口伺服电机,需订货。驱动器缺省参数仅适配STZ 系列伺服电机,选 配其它伺服电机时,出厂参数已备份在EEPROM 区。恢复出厂参数时应执行恢复备份,不可执行恢复缺省参数操作。 ※2:中小功率(小于等于1.5KW )为标准配置,中功率(大于1.5KW 、小于等于2.3KW )采用加厚 散热器。 〖注〗产品出厂时,上面填写框已按产品型号填写好,请用户与产品铭牌核对。 (2) 伺服电机型号 DA98交流伺服驱动器可与国内外多款伺服电机配套,由用户订货时选择。本手册按华中电机厂生产的伺服电机进行描述,其它型号伺服电机有关资料随伺服电机提供。 STZ —— HM 3(1DA98伺服驱动器标准附件安装使用手册(本书)1本 安装支架 2个 ×8沉头螺钉 4个 插头(DB25孔) 1套 (注1) 插头(DB25针) 1套 (注2) 〖注1〗 配套我厂位置控制器时,与信号电缆(3)米配套提供。 〖注2〗 我厂提供伺服电机时,用户可选择反馈电缆(3米)配套提供。 (2)伺服电机标准附件按伺服电机说明书提供 1.3 产品外观 1) 伺服驱动器外观 2) 伺服电机外观 第二章 安装 光电编码器反馈 电机工作电压H :300V L :200V 额定转速级别 1:低速(1500/2000rpm ) 2:高速(2500/3000rpm ) 零速转矩2、4、5、6、7.5、10…N.m 正弦波驱动伺服电机 电机外径 110:110×110mm 130:130×130mm