高超声速飞行器乘波体构型及其设计
高超声速飞行器乘波体构型及其设计
摘要:高超声速飞行器由于具有高空高速、巡航距离远以及突防能力强的特点而备受追捧,而乘波体构型正能满足这些要求。在欧拉方程的基础上,国际上提出了多种基于楔形流动和锥形流动的乘波体构造方法。此外,也提出了考虑如粘性效应等其他因素的优化方法。这些方法都将乘波体飞行器不断向工程应用推进。
关键词:乘波体附体激波自由流线追踪流线
1 引言
高超声速飞行器由于具有速度快、高度高、巡航距离远以及突防能力强的特点,近年来逐渐受到追捧。而相应的,为实现以上特点,对于其机体必须采用一种高升阻比和强机动性的气动外形。目前比较适合的气动外形有旋成体、翼身融合体、升力体和乘波体等[1]。
旋成体在Ma<1时升阻比较高,结构简单,但高马赫数飞行时机动性较差,比较适用于各种型号的导弹;翼身融合体机身机翼相融合,亦在Ma<1时升阻比较高,气动阻力小,内部容积大,但外形复杂,适用于超声速战斗机、战略轰炸机等;升力体没有机翼结构,Ma>1时升阻比都比较高,大迎角下和高超声速时有较好气动特性,内部体积利用率高,但外形复杂,比较适用于航天飞机和空天飞机等[2]。
而乘波体则是指一种外形是流线型,其所有的前缘都具有浮体激波的超声速或高超声速的飞行器。它的设计与常规的由外形决定流场再去求解的方法相反,而是先有流场,然后再推导出外形[3]。乘波体构型在高马赫数下具有更高升阻比,特别是对于Ma>5的高超声速飞行器。它具有以下四个显著的优点:
(1)乘波体外形的最大优点是低阻、高升力、高升阻比,其上表面没有流场干扰,没有流线偏转,激波限制在外形的前缘,使得在可压区中下表面上的高压同向上倾斜的外形一起组合,获得整个外形上的推力分量。
(2)乘波体外形在偏离设计条件下,仍能保持有利的气动性能。
(3)乘波体外形更适合使用喷气发动机或冲压发动机。
(4)乘波体外形因为是用已知的可以得到精确解的流场设计而成,所以更易于进
行优化设计以寻求最优构型。目前,考虑粘性的最优乘波体的研究也已取得了较大进展[4]。
因此,乘波体布局的飞行器有着十分广阔的应用前景。既可用作高超音速吸气发动机、气动构形一体化飞行器、单级入轨飞行器,双级入轨飞行器的第一级, 也可用作能够穿越大气层的可重复使用的高超音速飞行器。乘波飞行器还可作为高超音速导弹,在大气层内作低空高速飞行,用于低空突防。此外,乘波飞行器可作为高超音速侦察机或略巡航飞机。在民用面,乘波飞行器可设计成一种洲际高超音速客机,主要飞行段的巡航速度可达M5、M 6,甚至更高,4h可绕地球一圈[5]。
2 乘波体构型的生成
2.1 源于楔形流动的Λ型乘波体构型
1959年,Nonweiler[6]提出了由已知得流场构造三维高超音速飞行器的观点。Nonweiler 选择平面斜激波后的流场来生成有∧型横截面和三角翼平面的构型。Λ乘波构型的生成过程如下[7]:
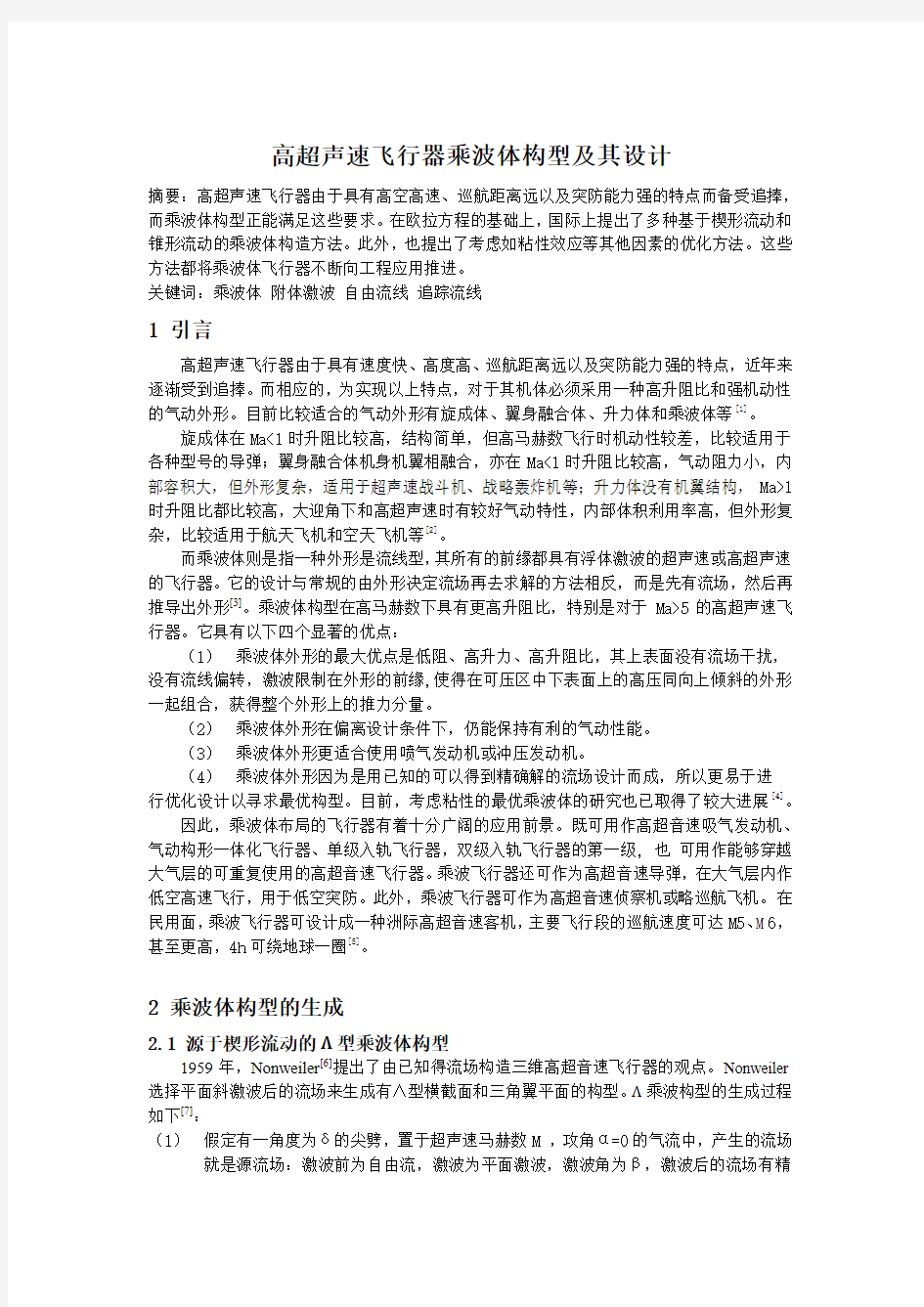
(1)假定有一角度为δ的尖劈,置于超声速马赫数M ,攻角α=0的气流中,产生的流场就是源流场:激波前为自由流,激波为平面激波,激波角为β,激波后的流场有精
确解,如图2.1.1所示。 图2.1.1 尖劈及其生产的源流场
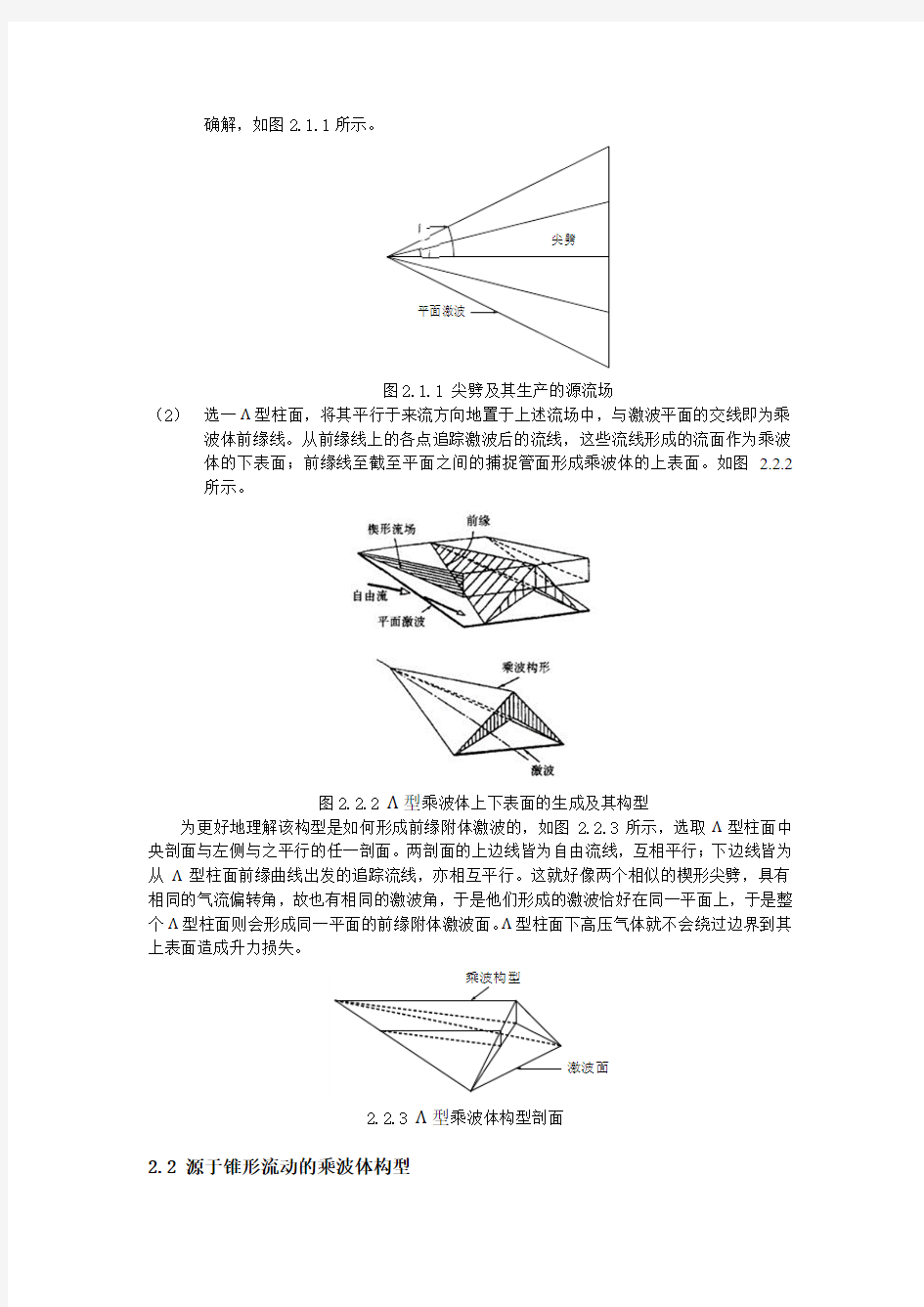
(2) 选一Λ型柱面,将其平行于来流方向地置于上述流场中,与激波平面的交线即为乘
波体前缘线。从前缘线上的各点追踪激波后的流线,这些流线形成的流面作为乘波体的下表面;前缘线至截至平面之间的捕捉管面形成乘波体的上表面。如图 2.2.2所示。
图2.2.2 Λ型乘波体上下表面的生成及其构型
为更好地理解该构型是如何形成前缘附体激波的,如图2.2.3所示,选取Λ型柱面中
央剖面与左侧与之平行的任一剖面。两剖面的上边线皆为自由流线,互相平行;下边线皆为从Λ型柱面前缘曲线出发的追踪流线,亦相互平行。这就好像两个相似的楔形尖劈,具有相同的气流偏转角,故也有相同的激波角,于是他们形成的激波恰好在同一平面上,于是整个Λ型柱面则会形成同一平面的前缘附体激波面。Λ型柱面下高压气体就不会绕过边界到其上表面造成升力损失。
2.2.3 Λ型乘波体构型剖面
2.2 源于锥形流动的乘波体构型
尖劈
平面激波
激波面
乘波构型
这种方法是Rasmussen[8]在1980 年根据高超声速小扰动理论提出的。他还对这些乘波构型进行了马赫数3 ~5范围的实验研究,证实了乘波体的设计理论,试验测量的压力分布表明所构造乘波体下表面流动是锥形的[9]。
当超音速气流流经一个圆锥时,会产生一道圆锥形激波。若在这个锥形流场内选择一个流面作为下表面,再选取一个如图 2.2(a)所示标有斜线和竖线的表面形成一个乘波体构型,则超音速气流也会在此升力体下方形成一个由紧贴在构型前缘的圆锥激波面,在激波面后也是一个高压区。
具体的生成步骤为:
首先,生成无粘锥形流场,然后,选择自由捕捉面,它与锥体激波相交的交线即为前缘曲线,通过前缘曲线到锥体底部向下游追踪流线,即可生成乘波构型的下表面,通过前缘曲线向后跟踪自由流流线直到锥体底部就可生成乘波构型的上表面,乘波构型上表面上的压力等于自由流压力。上表面的设计也可以采用其它技术,如将上表面设计为膨胀面或压缩面。乘波构型上表面平行于来流,其上面的压力等于自由流压力,下表面与圆锥激波之间的气流经过激波压力升高。
图2.2源于锥形流动的乘波构型的生成原理
2.3 源于倾斜圆锥和椭圆锥体流动的乘波体构型
假定有一圆锥体,自由流与圆锥体的轴线有一定的夹角α,如图2.3.1所示。自由流中通过圆锥顶点的流线即自由流轴线,它与与圆锥体轴是倾斜的,夹角为α,这样生成的激波及流场可以通过数值求解获得。同样,如果是椭圆锥体,其轴线与自由流的夹角为零,所生成的激波和波后流场也可以由数值解法求出。
图2.3.1 倾斜圆锥流动示意图
任何通过自由流轴的平面都平行于自由流。在通过自由流轴线的平面中选择一对成任意夹角的平面A、B,这对平面与激波面的交线形成乘波体前缘线。平面A、B在前缘线与截至平面之间的部分形成乘波体上表面。从前缘线上的各点开始追踪流线,流线形成的流面形成乘波体的下表面。
因此,上表面是通过自由流轴线的一对自由流平面,下表面是锥体流场的弯曲流面。乘波体的上表面、下表面和激波面相交于前缘线上。图 2.3.2(a)是源于倾斜圆锥流动的乘波构型,图2.3.2(b)是源于椭圆锥体流动的乘波构型,图2.3.2(c)是源于倾斜-椭圆锥体流动的乘波构型。
图2.3.2 源于倾斜圆锥流动和椭圆锥体流动导出的乘波构型
2.4 源于楔形-锥形混合流动的乘波体构型
选择楔形—锥形混合流动是为了使乘波构形既有平面楔形乘波构形的特性,也有源于锥体流动乘波构形的特性,即来自楔形乘波构形下表面的均匀流动和来自锥体乘波构形的高L /D及更大的体积[5]。
楔型-锥形混合流流场的乘波构型生成的具体步骤是:
首先,选择楔-锥形组合体作为生成体。该生成体的上面部分为圆锥体的一部分,半锥顶角给定;下面部分为一楔面,给定半楔角;将上述生成体置于超声速自由流中,给定马赫数M,和攻角等于零,然后求解出激波位置和形状以及激波后的流场,如图4.1所示,上部激波为圆锥激波,下部激波较为扁平,因此下部气流较为均匀;
图 2.4.1 楔-锥组合体及其激波生成
根据进气道的要求,在截至平面上的生成体与激波之间选取任意形状的曲线作为乘波构型下表面的尾缘线,从尾缘上的各点向上游追踪流线,这些流线与激波面的形成乘波构型的前缘线,前缘线至尾缘线之间的流面即为乘波构型的下表面。
图2.4.2 源于楔形-锥形流动的乘波构型
2.5 源于吻切锥理论生成的乘波体构型
考虑到乘波体构型末端截面放置发动机我的进气道进口,锥导乘波体锥形流的均匀性并不好。此外,在进行前体与发动机的一体化设计时,结构上往往要求位于“末端截面”处的进气口形状作成扁平的,这就反过来要求激波形状不是圆锥面[10]。而Sobieczky[11]的吻切锥OC( Osculating Cone)理论。他证明了在流场上的任何一点一般的三维超音速流运动方程都可以在二级精度范围内用一个轴对称流的运动方程来逼近。这个轴对称流的轴线位于通过该点的流线的吻切平面)内。这种方法大大节省了计算时间,既能满足进气口的形状要求又能快速生成激波形状和乘波机外形。
现在, 在外形设计中预先设定好进气道进口曲线ICC ( Inlet Capture Curve)和流动捕捉管FCT的母线FCC的形状, 如图2.5.1所示。这个ICC曲线就是进气道进口截面上的激波形状曲线,它可以是圆弧,也可以是其它的任意曲线,只要保证该曲线没有折点,曲率中心曲线连续即可,由设计员给定。FCC曲线是进气道进口截面的上部型线,亦即乘波机下表面与进气道进口截面的交线,其位置由它与ICC的法线距离好h(s)确定。也由设计员给定。为了确定激波形状和乘波机外形,将所给定的ICC曲线分成若干个小段,把每一小段曲线看成一小段圆弧,而这个“ 圆弧”又是一个圆锥激波与“末端截面”的交线的一部分。这个圆锥激波就是“吻切锥”,其锥顶位置由这一小段“圆弧”的曲率中心和给定的激波角确定。这个吻切锥和FCT 柱面的交点就是前缘点,由该点出发向下游追踪即可得到一条流线。依此类推,对每段ICC曲线都应用上述吻切锥方法, 得到许多小段激波和许多个前缘点以及由这些点向下游拖出去的流线. 这些小段激波的包络面形成一个新的激波面,也称为斜率面激波,而那些流线所形成的流面就组成乘波机外形的下表面,如图2.5.3所示。在吻切锥方法中,圆锥激波角的大小是不变的,即激波强度不变。当然,圆锥的顶点位置是在变的。由于仅需计算一个锥型流场,所以这种方法的计算速度很快。
图2.5.1 ICC 、FCC 及h( s)之间的关系
图2.5.2进气道进口截面曲线图
图2.5.3吻切锥方法示意图
2.6 生成乘波构型的定常和变楔角方法
这种方法的具体步骤如下[12]:
使用确定翼平面和上表面曲率的二维幂函数方程生成了有二维(平面)激波的乘波构型,如图2.6所示,参数A和B是正的比例常数,指数n在0~1之间变化。为了保证是平面激波,即源于楔形流场,构型的楔形角θ必须为常数。通过控制着5个变量(A,B,n,L,θ)可生成各种乘波构型。在假定有附着前缘激波时设计乘波构型,并不是所有变量与这一几何形状的混合都会得到有附着激波的、实用的乘波构型。对有附着激波的下表面曲率,θ必须小于最大的激波附着角。图2.6给出了由此生成的乘波构型,附着激波的要求将变量的数量减少为4个:(A, n,L,θ)。因此,这种方法称为定常楔形角方法(the constant wedge angle method,CW A)。
图2.6定常楔形角乘波构形
上述方法开展到非平面激波(三维时),称为变楔形角方法(the variable wedge angle method,VMA),其中翼平面和上表面的生成与定常楔形角方法相同,只是增加了第3个幂函数以确定下表面的弯曲。通过控制6 个变量(n,m,w,l,θ.δ)可生成各种乘波构型。
图2.7变楔形角下表面凸起乘波构形
2.6 生成乘波构型的其他方法
Jones等人通过Eular方程求解任意激波后的流场,提出基于任意激波形状生成乘波构
型的方法。而Marcus Lobia等人则将容积率以及载荷效率引入到乘波构型的优化设计中,将乘波构型向实际应用推进了一步。在马里兰大学,Corda,Bowcutt等在Anderson教授的带领下,最早把粘性效应考虑到乘波体构型的优化当中。他们把圆锥轴对称流场用于乘波构型的设计,在粘性条件通过工程估算,有效地估算了乘波飞行器的性能,并在此条件下运用单纯形优化算法进行了简单的优化工作,取得了不错的研究结果。
3 结语
乘波体构型经过数十年的发展,基于无粘流动欧拉方程的生成方法已十分完善,再要提出新的方法难度较大。而为了早日将乘波体构型成功运用在以高超声速飞行器为目的工程实际上,考虑粘性效应、湍流转捩、稀薄气体动力学、乘波体-发动机-机身一体化设计及容积率等问题的乘波体优化设计应当成为研究的重点,而此基础则是对于上述几类乘波体构型的评估与综合运用。此外,相应的数值计算方法与软件也应当大力发展,如马里兰大学的MAXWARP和科罗拉多大学的WIPAR等。
高超声速飞行器是未来飞行器的发展趋势,而随着飞行马赫数的提高,乘波体构型将是最有应用前景的气动布局。在这个方面取得领先的研究与应用水平,必将获得先发制人的优势。
参考文献
[1].郭迪龙. 高超声速飞行器的气动外形. 航空知识,2007(10):33~34.
[2].许志,唐硕,闫晓东. 高超声速飞行器气动外形选择.中国飞行力学学术年会,2005.
[3].蔡国飙,徐大军. 高超声速飞行器技术. 北京:科学出版社,2012.
[4].牛东兵. 乘波体气动外形设计综述. 飞航导弹,1998(8):5~8.
[5].赵桂林,胡亮,闻洁. 乘波构型和乘波飞行器研究综述. 力学进展,2003,33(3).
[6].Nonweiler T R F. Aerodynamic problems of of manned space vehicles. Journal of
the Royal Aeronautical Society, 1959, 62:521~530.
[7].杨海江.乘波体气动外形设计与计算. 南京航空航天大学,2008.
[8].Rasmussen M L. Waverider configurations derived from inclined circular and
elliptic cones. Journal of Spacecraft and Rockets, 1980, 17(5), 537~545. [9].Rasmussen M L, Jischke M C, Daniel D C. Experimental forces and moments on
Cone-derived waveriders for M∞ = 3 to 5. Journal of Spacecraft and Rockets, 1982, 20(6):539~545.
[10].王卓,钱翼稷. 乘波机外形设计. 北京航空航天大学学报, 1999, 25(2):180-183.
[11].Sobieczky H, Doughterty F C, Jones K. Hypersonic waverider design from given
shock waves. In:1st International Hypersonic Waverider Symposium, University of Maryland, 17~19, 10, 1990.
[12].Starkley R P, Lewis M J. Simple analytical model for parametric studies of
hypersonic waveriders. Journal of Spacecraft and Rockets, 1999, 36(4): 516~523.
[13].Starkley R P, Lewis M J. Analytical off design lift-to-drag-ratio analysis
for hypersonic waveriders. Journal of Spacecraft and Rockets, 2000, 37(5): 684~691.
[14].KD Jones, H Sobieczky, AR Seebass, FC Dougherty. Waverider design for
generalized shock geometries. Journal of Spacecraft & Rockets, 1971, 32(6):957-963.
[15].M Lobbia,K Suzuki. Design and analysis of payload-optimized waveriders.
AIAA2001-1849.
[16].Bowcutt K G, Anderson J D. Viscous Optimized Hypersonic Waveriders. AIAA
1987-0272.
[17].陈小庆. 高速乘波飞行器气动布局设计研究. 国防科学技术大学, 2006.
X-51及高超声速飞行器简介
美国X-51A飞行器及总体设计及其关键技术简介 Xxx 摘要:从计划的背景、飞行器的构造、热防护材料研发测试以及实际飞行试验等方面对X-51A 的发展计划作了较为详细的介绍,并据此对美国发展高超声速飞行技术的研究流程和理念有个一定的了解与认识。 关键词:X-51A 高超声速导弹热防护系统结构材料飞行器 引言:美国自二十世纪九十年代启动“全球敏捷打击”计划以来,一直处于低速发展过程中,该计划近期开始迅速升级,从改造“三叉戟”导弹开始,美国正推出一系列先进攻击武器概念,包括飞机、无人机和导弹。其中,X-51高超声速巡航导弹是美国武器库目前速度最快的全球打击武器,可以在一小时内攻击地球上任一目标。 1项目概况 巡航导弹在美国武器系统中具有特殊的地位,在未来信息化战争中,巡航导弹不要要成为首选的打击武器,也是美军实行远程军事打击的必备武器。 美国于20世纪90年代启动的“全球敏捷打击”计划自推出以来一直处于低速发展过程中,直至近年该计划开始迅速发展。美国从改造三叉戟导弹开始,陆续推出一系列的先进攻击武器概念,包括新一代的飞机、无人机和导弹。 X-51A计划是由美国空军研究试验室(AFRL)、国防高级研究计划局(DARPA)、NASA、波音公司和普惠公司联合实施的旨在验证高超声速飞行能力的计划。终极目标是发展一种马赫数达到5~7的可以在1 h内进行全球打击的武器,包括快速响应的空间飞行器和高超声速巡航导弹。X-51A于2010年2月中旬进行了首次高超声速飞行试验。 X-51A的首飞创造了又一个人类历史记录———超燃冲压发动机推进的历时最长的高超声速飞行,刷新了X2 43创造的12 s的记录。X2 51A首飞的成功意味着, 超燃冲压发动机将提供一种全新的快速全球打击能力。据称,该高超声速导弹将能够在60 min内实施全球打击。美国国防部/NASA的X2 51A项目则是这一新型武器系统方案的关键部分。X2 51A 的飞行试验对于空间进入、侦察、打击、全球到达以及商业运输等都有重要意义。 2 X-51A计划的背景 美国空军认为,高超声速推进技术是美国亟须发展的关键领域之一,为了达到这一目的,必须走“阶梯式发展”的道路。1979年首次发射的先进战略空射导弹(ASLAM)是早期的高超声速导弹,它使用高速冲压发动机实现了马赫数为5. 5的飞行,虽然达到了高超声速,但由于冲压发动机的燃烧是在亚声速状态下进行,效率非常低。解决这一问题的方法是使用超燃冲压动机,于是X-51A计划应运而生。 20世纪90年代中期,国家空天飞机(NASP,NationalAerospace Plane)计划终止后,美国空军转而投资HyTech(Hypersonic Technology)计划以延续其对高超声速技术的研究。2004年1月, AFRL选择波音公司与普惠公司共同制造SED-WR的验证机,由波音公司制造机身,普惠公司
高超声速飞行器鲁棒控制系统的设计
高超声速飞行器鲁棒控制系统的设计 Christopher I. Marrison and Robert F. Stengel Princeton University, Princeton, New Jersey 08544 本文设计了高超声速飞行器纵向平面鲁棒控制系统。飞行器纵向平面的非线性数学模型包含了28个不确定参数。利用遗传算法搜索每个控制器的系数设计空间;利用蒙特卡洛算法检验每个搜索点处的稳定性和鲁棒性。补偿器的鲁棒性用概率函数来表示,该函数表示在参数可能变动范围内,闭环系统的稳定性等性能指标落入允许范围的概率。设计了一性能指标函数,使其最小,从而产生可能控制器系数空间。这种设计方法综合考虑了不同的设计目标,辨识了鲁棒性指标下的系数的不确定性。这种方法有效利用了计算工具,广泛考虑了工程知识,设计出了能够应用于实际的控制系统。 本文中用到的符号: a ——声速,ft/s D C ——阻力系数 L C ——升力系数 ()M C q ——俯仰角速率引起的俯仰力矩系数 ()M C α——攻角引起的俯仰力矩系数 ()M C E δ——舵偏引起的俯仰力矩系数 T C ——发动机推力系数 c ——参考长度,80ft D ——阻力,lbf h ——高度,ft yy I ——俯仰转动惯量,6710?slug-ft 2 L ——升力,lbf M ——马赫数 yy M ——绕俯仰轴的转动力矩,lbf-ft m ——质量,9375slugs q ——俯仰速率,rad/s E R ——地球半径,20 903 500 ft r ——距地心距离,ft S ——参考面积,3603ft 2 T ——推力,lbf V ——速度,ft/s α——攻角,rad
高超声速飞行器结构材料与热防护系统
本文2010201222收到,作者分别系中国航天科工集团三院310所助工、高级工程师 高超声速飞行器结构材料与热防护系统 郭朝邦 李文杰 图1 挂载在B 252H 机翼的X 251A 摘 要 随着人类对高超声速飞行器的不断探索,结构材料和热防护系统已成为高超技术发展的瓶颈。首先介绍了X 251A 和X 243A 的项目概况、结构材料和热防护系统,然后分别从高超声速试飞器超高温热防护材料、大面积热防护材料和热防护系统等几方面对X 251A 和X 243A 试飞器进行了分析,最后提出了结构材料和热防护系统发展的关键技术。 关键词 X 251A X 243A 结构材料 热防护 系统 飞行器 高超 引 言 随着高超声速飞行器飞行速度的不断提高,服役环境越来越恶劣,飞行器的热防护问题成为限制飞行器发展的瓶颈。而高超声速结构材料和热防护系统的研究与开发是高超声速飞行器热防护的基础,因此,各国都大力开展了高超声速飞行器热防护材料与结构的相关研究。尤其是以美国为代表的X 251A 和X 243A 高超声速飞行器在结构材料和热防护方面的研究比较突出,本文对这两种试飞器的结构材料和热防护技术分别进行详细介绍。1 X 251A 高超声速飞行器1.1 项目概况 X 251A 计划是由美国空军研究试验室(AFRL )、国防高级研究计划局(DARP A )、NAS A 、波音公司 和普惠公司联合实施的旨在验证高超声速飞行能力 的计划。终极目标是发展一种马赫数达到5~7的可以在1h 内进行全球打击的武器,包括快速响应的空间飞行器和高超声速巡航导弹。试验方式是使 用B 252H 轰炸机挂载X 251A 飞行,达到预定的飞 行条件,释放X 251A 进行飞行试验。图1是挂载在B 252H 机翼下的X 251A 。美国空军在2003年开始研 制试飞器,2004年12月完成初始设计评估,2005年1月开始详细设计,2005年9月27日被正式赋予X 251A 的代号,2007年5月该项目通过关键设计评审。2009年12月9日在加利福尼亚州爱德华兹空军基地进行了首次系留挂载飞行试验,X 251A 挂载在B 252H 重型轰炸机的机翼下向北起飞后爬升至15.24km 高空,随后该机携载X 251A 做了较柔和的机动动作。按计划,X 251A 将于2010年2月中旬进行了首次高超声速飞行试验。1.2 结构材料与热防护系统1.2.1 总体结构 X 251A 整个飞行器长7.62m ,质量1780kg,
高超声速飞行器动力技术介绍及部分国家发展现状
一、高超声速飞行器技术发展路径及动力技术介绍 1.1 高超声速飞行器技术发展路径 高超声速飞行器区别与其他飞行器最大的特点是高度一体化,使得飞行器机身与推进系统密不可分,从某种意义上来说是无法划分出一个所谓的“发动机”进行研制的,这样的“发动机”也只有在与机身合二为一才能发挥其真实的性能,也才能真正的运行起来。因此,高超声速飞行器首先是“自顶而下”地分解研究对象和研究阶段,随着技术的发展再逐步地整合各部分的研究,逐级、逐步形成一个完整的飞行器研究对象。从总体方案设计的完整的飞行器作为研究对象可划分为四个层次的研究:气动/推进一体化研究、全流动通道推进系统研究、超然冲压模型发动机研究、超然冲压发动机部件研究,将高超声速飞行器自顶而下分解后就,再从分解出来的底层部件逐步发展“自下而上”到顶层飞行器。同时“自顶而下”的技术分解和“自下而上”的技术集成这两条路线又是有交互的,在试验研究的任何阶段发现问题,都应当反馈到飞行器总体的设计,重新定义部件、子系统的研究对象。 图1.1 1.2 高超声速飞行器动力技术介绍 气动/推进一体化研究 全流动通道推进系统研究 超然冲压模型发动机研究 超然冲压发动机部件研究
高超声速飞行器的核心关键技术包括超燃冲压发动机技术、高超声速飞行器组合推进系统技术、高超声速飞行器机身推进一体化设计技术、高超声速飞行器热防护技术、高超声速飞行器导航制导与控制技术、高超声速飞行器风洞实验技术。下面的篇幅分别对超燃冲压发动机和组合推进系统技术做简要介绍: (1)超然冲压发动机概念介绍 超燃冲压发动机是高超声速飞行器推进技术的核心技术,超然冲压发动机与亚燃冲压发动机同属于吸气式喷气发动机,由进气道、燃烧室和尾喷管构成,没有压气机和涡轮等旋转部件,高速迎面气流经进气道减速增压,直接进入燃烧室和燃料混合燃烧,产生高温燃气经尾喷管加速后排出,从而产生推力。 超燃冲压发动机通常可以分为双模态冲压发动机和双燃烧室冲压发动机。双模态冲压发动机是指发动机根据不同的来流速度,其燃烧室分别工作于亚声速燃烧状态、超声速燃烧状态、超声速燃烧/亚声速燃烧/超声速燃烧状态。双燃烧室冲压发动机是指同一发动机同时具有亚燃冲压和超燃冲压双循环的超燃冲压发动机,采用双循环的主要目的是用亚燃冲压发动机点燃超然冲压发动机来解决煤油燃料的点火和稳定燃烧问题。 (2)超声速燃烧概念 在一定的压缩和膨胀效率的条件下,进入发动机的空气有一最佳压缩量,使得发动机的效率最高。燃料的热值和过程的效率越高,其
A280-飞机总体设计-matlab-SRR-DT12-新型高超声速飞行器
飞机总体设计 新一代高超声速无人机——“赤隼” 第一阶段SRR总结报告 学院名称:航空科学与工程学院 专业名称:飞行器设计与工程 组号:DT12 组长:殷海鹏 2013 年 4月 1日
目录 一、任务陈述 (4) 二、市场需求 (4) 三、相关竞争实施方案 (5) 1. 天基信息系统 (5) 2. 空基侦查系统 (5) 四、运行理念 (6) 1. 潜在运用对象 (6) 2. 载荷能力 (6) 3. 典型任务剖面 (6) (1)任务剖面1(侦查过程中发现重要作战目标) (6) (2)任务剖面2(侦查过程中未发现重要作战目标) (6) 五、系统设计需求 (6) 1. 设计要求 (6) (1)X-43A (7) (2)X-51A (7) (3)HTV-2 (7) (4)HTV-3X (8) 六、新技术与新概念 (8) 1. 激光雷达 (8) 2. 气动布局 (8) 3.热防护 (8) 七、初始参数 (9) 方案一 (9) 方案二 (10) 八、人员分工 (10) 九、本阶段总结及下阶段任务计划 (11) 十、参考资料 (12)
图表目录 图1 天基信息系统 (5) 图2 空基侦察系统 (5) 图 3 X-43A (7) 图 4 X-51A (7) 图 5 HTV-2 (7) 图 6 方案一概念草图 (9) 图7 方案二概念草图 (10) 表 1 方案一初始参数 (9) 表 2 方案二初始参数 (10) 表 3 小组人员分工表 (10)
一、任务陈述 在新世纪的战争中,高超声速飞行器的优势主要体现在以下三个方面:首先是可以迅速打击数千或上万公里外的各类军事目标,大大地拓展了战场的空间。其次,突防能力更加强大,防空系统的拦截概率因反应时间太短而大幅度下降,具有较高的突防成功率。第三,超高速的飞行可以使得雷达难以探测,是一种新型的隐身方案。在新的战争形态中,信息战变得越发重要,侦查机是获取信息的重要来源,同时针对重要目标,在侦查同时具有一定攻击能力会使侦查起到意想不到的效果。从目前中国的空军机种来看,急需一款高超声速无人侦查机,此机最好还能有一定的攻击力,在侦查到重要目标时给予高效打击,对增强我国国防力量有重要作用。 二、市场需求 臭鼬工厂曾预测飞行器的下一场革命将来自于‘速度’,其速度优势会让各国现役防空导弹统统变成废铜烂铁。高超声速飞行器具有广阔的应用前景和巨大的军事价值。纵观21世纪的战场需求,高超声速飞行器已是不可缺少的攻击型和防御型兵器,世界各国都在加速这方面的研究工作,美国当前Ma为8-10的飞行器正在试验,而在2025年计划装备Ma为12-15的飞行器。澳、俄、法、德、日等很多国家对于高超声速飞行器的相关技术、功能、应用价值展开了积极的探讨与研究,并制定了一系列技术发展计划。从市场规模的角度来看,此类飞行器各国都有投入,但由于技术原因,规模较小而成功率偏低,在这种情况下,能率先设计生产出超高声速无人机的国家必能在错综复杂的国际环境下争取到先机,对于现在的世界态势和中国的防御性国防策略来说,我国对超高声速无人机有着极其重要的需求,比如马航失事后,如果能出动10Ma的侦察机进行快速侦查,必可得到最新最真实的情报,在新的战争理念中,被发现就是被消灭,侦察机与其他飞机相比必将会有着更高的军事地位。
高超声速飞行器乘波体构型及其设计
高超声速飞行器乘波体构型及其设计 摘要:高超声速飞行器由于具有高空高速、巡航距离远以及突防能力强的特点而备受追捧,而乘波体构型正能满足这些要求。在欧拉方程的基础上,国际上提出了多种基于楔形流动和锥形流动的乘波体构造方法。此外,也提出了考虑如粘性效应等其他因素的优化方法。这些方法都将乘波体飞行器不断向工程应用推进。 关键词:乘波体附体激波自由流线追踪流线 1 引言 高超声速飞行器由于具有速度快、高度高、巡航距离远以及突防能力强的特点,近年来逐渐受到追捧。而相应的,为实现以上特点,对于其机体必须采用一种高升阻比和强机动性的气动外形。目前比较适合的气动外形有旋成体、翼身融合体、升力体和乘波体等[1]。 旋成体在Ma<1时升阻比较高,结构简单,但高马赫数飞行时机动性较差,比较适用于各种型号的导弹;翼身融合体机身机翼相融合,亦在Ma<1时升阻比较高,气动阻力小,内部容积大,但外形复杂,适用于超声速战斗机、战略轰炸机等;升力体没有机翼结构,Ma>1时升阻比都比较高,大迎角下和高超声速时有较好气动特性,内部体积利用率高,但外形复杂,比较适用于航天飞机和空天飞机等[2]。 而乘波体则是指一种外形是流线型,其所有的前缘都具有浮体激波的超声速或高超声速的飞行器。它的设计与常规的由外形决定流场再去求解的方法相反,而是先有流场,然后再推导出外形[3]。乘波体构型在高马赫数下具有更高升阻比,特别是对于Ma>5的高超声速飞行器。它具有以下四个显著的优点: (1)乘波体外形的最大优点是低阻、高升力、高升阻比,其上表面没有流场干扰,没有流线偏转,激波限制在外形的前缘,使得在可压区中下表面上的高压同向上倾斜的外形一起组合,获得整个外形上的推力分量。 (2)乘波体外形在偏离设计条件下,仍能保持有利的气动性能。 (3)乘波体外形更适合使用喷气发动机或冲压发动机。 (4)乘波体外形因为是用已知的可以得到精确解的流场设计而成,所以更易于进 行优化设计以寻求最优构型。目前,考虑粘性的最优乘波体的研究也已取得了较大进展[4]。 因此,乘波体布局的飞行器有着十分广阔的应用前景。既可用作高超音速吸气发动机、气动构形一体化飞行器、单级入轨飞行器,双级入轨飞行器的第一级, 也可用作能够穿越大气层的可重复使用的高超音速飞行器。乘波飞行器还可作为高超音速导弹,在大气层内作低空高速飞行,用于低空突防。此外,乘波飞行器可作为高超音速侦察机或略巡航飞机。在民用面,乘波飞行器可设计成一种洲际高超音速客机,主要飞行段的巡航速度可达M5、M 6,甚至更高,4h可绕地球一圈[5]。 2 乘波体构型的生成 2.1 源于楔形流动的Λ型乘波体构型 1959年,Nonweiler[6]提出了由已知得流场构造三维高超音速飞行器的观点。Nonweiler 选择平面斜激波后的流场来生成有∧型横截面和三角翼平面的构型。Λ乘波构型的生成过程如下[7]: (1)假定有一角度为δ的尖劈,置于超声速马赫数M ,攻角α=0的气流中,产生的流场就是源流场:激波前为自由流,激波为平面激波,激波角为β,激波后的流场有精
PID高超声速飞行器姿态控制中的应用展望
Oct.2010航天控制 v。1.28,N。.5AerospaceContr。1 。93?分数阶肼A∥在高超声速飞行器 姿态控制中的应用展望 齐乃明秦昌茂宋志国 哈尔滨工业大学,哈尔滨150001 摘要高超声速飞行器的发展是一个必然的趋势,但是其具有强耦合、严重非 线性、大范围气动环境变化的特点,这对飞行器的姿态控制系统提出了更高的要 求。本文简述了现代控制及智能控制在姿态控制器中的应用,回顾了传统PID 及其改进控制技术,针对新的被控对象特点,介绍了分数阶P,1矿及其发展。由 于分数阶PPIY"具有比传统PID更好的鲁棒性和控制性能,展望分数阶川1矿 控制在高超声速飞行器姿态控制中得到更广泛的应用。 关键词高超声速飞行器;姿态控制;传统PID;分数阶P,1矿 中图分类号:V448.2文献标识码:A 文章编号:1006.3242(2010)05-0093-06 ProspectofFractional-OrderPIADpController forHypersonicMissileAttitudeControl QINaimingQINChangmaoSONGZhiguo HarbinInstituteofTechnology,Harbin150001,China AbstractThe developmentofhypersonicmissileisaninevitabletrend.Therequirementofattitudecontrols弘temforaerocrafiishigherbecausethecharacteristicsofastrongcoupling,seriousnonlinearandlarge—scaleenvironmentalparametersarechangedinaerodynamic.Inthispaper,themoderncontrolandintelli—gent controlthatappliedtoattitudecontrolarebriefed,andclassicalPIDcontroltechnologyanditsim—provementarereviewed.thefractionalorderPI、D“controlleranddevelopmentforfknell3objectfeaturesarealsointroduced.Asaresult,fractionalorderPI、D“controlisbetterthanclassicalPIDcontrolinrobustnessandcontrolperformance.Therefore,fkfractionalorderP11D“controlwillbe埘池矽usedinhypersonicmissileattitudecontr01. KeywordsHypersonicmissile;Attitudecontrol;ClassicalPIDcontrol;FractionalorderP11D9controller 高超声速飞行器以美国的超一x计划飞行器及通用航空飞行器(CAV)[13为代表,计划实施对全球的快速打击,俄罗斯、日本等国也在积极研制高超声速飞行器,而我国尚处于起步阶段。 高超声速飞行器的飞行速度和高度变化大,可全空域机动飞行但其大范围气动环境的变化引起系统参数变化范围大,各通道间耦合影响也变大,使其成为具有强耦合、严重非线性并带有不确 收稿日期:2009-07-26 作者简介:齐乃明(1962一),男,哈尔滨人,教授,博士生导师,主要研究方向为航天器飞行动力学控制与仿真;秦昌茂(1985一),男,江西人,博士,主要研究方向为高超声速飞行器制导与控制;宋志国(1987一),男,黑龙江人,硕士, 主要研究方向为高超声速飞行器制导与控制。
高超声速飞行器发展现状
高超声速飞行器 一、国内外高超声速飞行器研制现状 高超声速飞行器技术是21世纪航空航天技术的新制高点,是航空史上继发明飞机、突破声障飞行之后第三个划时代的里程碑,同时也将开辟进入太空的新方式。高超声速飞行器技术的突破,将对国际战略格局、军事力量对比、科学技术和经济社会发展以及综合国力提升等产生重大和深远的影响。因此,世界主要国家一直把高超声速飞行器研制作为科技发展的最前沿阵地,从人力、物力、财力等各方面给予大力支持。自20世纪50年代末开始探索超声速燃烧冲压发动机技术以来,经过几十年的探索,美国、俄罗斯、法国、德国、日本、印度和澳大利亚等国在20世纪90年代初陆续取得了技术上的重大突破,并相继进行了地面试验和飞行试验。这表明高超声速技术从进行概念和原理探索的基础研究阶段,进入了以某种高超声速飞行器为应用背景的先期技术开发阶段。各国技术开发的主要应用目标近期为高超声速巡航导弹,中期为高超声速飞机,远期为吸气式推进的跨大气层飞行器、空天飞机。高超声速飞行器技术是21世纪航空航天技术的制高点,也是重要的军民两用技术。虽然目前仍存在不少技术难题,而且耗费巨大,但从世界各研制国目前的发展势头来看,以超燃冲压发动机为动力的高超声速巡航导弹有可能在2010年前后问世。预计到2025年,以超燃冲压发动机为动力的高超声速飞机和空天飞机也有可能投入使用,并将在军事、政治和经济等领域产生重大影响。 1 美国 1.1 Hyper2X计划 经过较长时间的研究和实践,美国在高超声速飞行器的设计研制方面积累了丰富的经验。作为试验性高超声速飞行研究计划,Hyper2X计划是对以往所做工作的一次检验。Hyper2X计划是美国国家航空航天局(NASA)近年来重点开展的高超声速技术研究计划,主要目的是研究并验证可用于高超声速飞机和可重复使用的天地往返系统的超燃冲压发动机技术,并验证高超声速飞行器的设计方法和试验手段。1997年1月,NASA与兰利研究中心、德莱顿飞行研究中心签订合同,Hyper2X计划正式启动。Hyper2X计划的试验飞行器代号为X243,根据演示验证的任务不同分为X243A、X243B、X243C和X243D,共4个型号。 1.1.1 X243A X243A技术由位于弗吉尼亚州汉普顿的NASA兰利研究中心和位于加利福尼亚州爱德华的NASA德莱顿飞行研究中心负责开发。其中机身和发动机由位于田纳西州塔拉荷马的ATKGASL公司(原微型飞行器公司)制造,位于加利福尼亚州亨亭顿的波音公司鬼怪工厂负责部分系统工程、热防护、操纵、导航和控制设计以及飞行控制软件、内部布局和结构设计。X243A的助推器是经过改装的飞马座运载火箭的第一级,该系统由位于亚利桑那州昌德勒的轨道科学公司提供X243A机身长3.66m,高660mm,翼展1.53m,质量1360kg,由采用液氢燃料的双模态超燃冲压发动机推进。1997年3月,NASA选定ATKGASL公司为飞行研究任务装配X243A无人驾驶研究飞行器。1997年12月,轨道科学公司对飞马座运载火箭成功进行了关键的设计审查。1998年,1台超燃冲压发动机作为第一部硬件交付NASA,随后这台发动机在兰利研究中心的2.44m八支点高温风洞中进行了一系列测试。1999年10月,第一架X243A交付德莱顿飞行研究中心。2000年,X243A在ATKGASL公司的
高超声速飞行器一体化优化设计
高超声速飞行器一体化优化设计 摘要 高超声速飞行器是二十一世纪航空航天领域的研究重点之一,其在军事和民用领域都有广泛的应用前景。相比于传统的低速飞行器,高超声速飞行器涉及的流动更加复杂,对飞行器设计的要求也越高。飞行器设计是多个学科的综合化系统设计,相关研究表明,对于一个单一的乘波体飞行器,其升阻比可达到8,但是匹配发动机后的飞行器其升阻比不超过4,即单纯的机体与发动机叠加并不能达到最佳效果。因此,飞行器的一体化设计和优化设计尤为重要。本文概述了高超声速飞行器一体化/优化设计的主要研究进展,并对相关技术进行了展望。 1. 引言 随着航空航天技术的发展,高超声速飞行器的研究如今如火如荼。以美国为例,在过去的半个世纪里,美国开展了多个吸气式高超声速飞行器研制项目,取得了众多有价值的成果。同时需要注意到,飞行器是一个十分复杂的系统,飞行器设计是一个不断寻优的过程,最终完整的飞行器应该是一个综合性能最优的系统。 图1 美国主要的高超声速飞行器项目 乘波体构型由于具有升阻比高、下表面流场均匀以及有利于机体/机身一体化设计而受到人们的重视。1990年在马里兰大学召开的第一届乘波体国际会议将将其推向了一个新的研究高潮。如今,各种类型乘波飞行器层出不穷。
图2 各种类型的乘波体飞行器 升力体构型高超声速飞行器往往采用超燃冲压发动机作为动力,飞行器前体下壁面作为进气道外压缩段,后体下壁面作为喷管膨胀。因而,这类飞行器具有显著的机体/推进一体化特征,飞行器机体与发动机形成的流场存在强烈的耦合作用,包括:飞行器前体形状、积薄结构和边界层发展直接影响进气道气动性能、捕获流量和压力恢复系数;发动机位置、几何形状对飞行器力/力矩产生影响;尾喷口燃气既可产生力/力矩,也会和控制舵面发生相互作用,影响飞行姿态、稳定性。 图3 典型高超声速飞行器流场示意图 2. 国外发展情况 气动外形与发动机一体化设计思想源于不断的高超声速技术和超燃冲压发动机技术的研究实践,国外在这方面已经做了大量的研究工作。图4为美国高超声速技术的项目型号项目概况,图5为法国的LEA飞行试验项目,图6为日本的高超声速运输机项目。
高超声速飞行器技术研究中心
高超声速飞行器技术研究中心 来源:国防科技大学更新时间:2010-6-28 8:56:26 点击:11502次高超声速飞行器技术研究中心成立于2009年10月,中心下设高超声速飞行器总体技术研究室、高超声速推进技术研究室、燃气引射技术研究室、燃烧流动与传热研究室四个研究室。中心共有研究人员33名,具有高级专业技术职务的教师19名,具有博士学位的教师31名。高超声速推进技术团队2008年成为国家教育部“长江学者和创新团队发展计划”的创新团队。 近年来,依托“航空宇航推进理论与工程”国家重点学科和“飞行器设计”国家重点(培育)学科,结合流体力学、固体力学、材料学等相关学科,在保持火箭发动机研究特色与优势的基础上,在高超声速飞行器总体设计、超燃冲压发动机、地面模拟试验、超声速流动燃烧机理等方面研究取得了重大进展。2009年获得国家技术发明二等奖1项。 在国家、教育部以及军队相关计划的支持下,中心已建成占地120亩、建筑面积11000平方米的高超声速飞行器技术试验基地,拥有系列化的超燃冲压发动机直连式试验台和自由射流试验系统,配备了激光光谱燃烧流动诊断PLIF系统、Malven激光测粒仪、PDA粒子动态分析仪、高速纹影仪、PIV、CVI/CVD等先进观测设备和多机并行计算集群系统,为高超声速飞行器关键技术攻关和基础研究奠定了坚实基础。 中心承担了本科、硕士、博士学员的多门课程教学和基础研究条件建设任务。新建了基础研究试验大楼,建成了多个基础研究实验平台,并配备了先进试验仪器和测量设备。这些基础研究试验平台完全向学员开放,对于学员进行高水平论文研究、实验能力的培养以及综合素质的提高提供了有力的支撑和保障。 中心的主要研究方向有: ●飞行器总体技术 本研究方向重点开展高超声速飞行器总体一体化设计、飞行器布局优化设计及应用等方面的研究。 ●高超声速推进技术 本研究方向主要开展超燃冲压发动机、发动机地面试验与飞行试验技术、高超声速飞行器机体/推进系统一体化设计、超声速燃烧与流动机理等方面的研究。 ●燃气引射技术 本研究方向主要开展航空航天发动机高空模拟试验系统等方面的研究。 ●发动机燃烧、流动与传热机理研究
高超声速飞行器若干问题研究进展_陈予恕
国家自然科学基金重点项目(编号:10632040) 本文2009-03-10收到,陈予恕、郭虎伦分别系哈尔滨工业大学院士、博士生,钟顺系天津大学航空航天研究院博士生 高超声速飞行器若干问题研究进展 陈予恕 郭虎伦 钟 顺 摘 要 介绍了国外高超声速飞行器的发展现状,并 总结了未来一段时期高超声速飞行器的发展方向和趋势。分析了高超声速飞行器的外形选择及其气动问题,发动机的选取与机体一体化问题和气动加热及防热问题。最后提出了未来高超声速飞行技术发展的几个方向。 关键词 高超声速飞行器 气动弹性 机体一体 化 气动加热 防热 引 言 高超声速飞行器是指飞行马赫数大于5.0的远程巡航飞行器,它综合了航空航天领域众多学科的新技术,代表了未来航空航天领域的研究发展方向,被认为是继隐身技术之后的又一重点技术领域。 按采用的动力装置不同,高超声速飞行器可分为火箭推进高超声速飞行器(Rocke-t Po w eredH yper -sonic Vehicle ,RP HV )和吸气式高超声速飞行器(A ir -B reath i n g H yperson ic V ehic l e ,AB HV )两类。早期的高超声速飞行器,如X-15和X-20,均以火箭发动机为动力,属于RPHV 。由于其性能不佳,后 续研究几乎没有开展。随着对超燃冲压发动机研究的深入,AB HV 成为各航空航天大国的发展重点。AB HV 包括吸气式运载器(A ir -Breath i n g Launch V e -h icle ,ABLV )和高超声速巡航飞行器(H yperson ic C r u ise V ehic le ,HCV )。ABLV 又称为空天飞机(A erospace Plane ),主要执行入轨任务,可分为单级入轨和多级入轨系统。H CV 主要指在大气层内飞行、执行巡航任务的飞行器,可用作高超声速飞机、战略攻击机和巡航导弹,均采用超燃冲压发动机作为动力系统。 高超声速飞行器具有以下优点[1] : 1)高超声速飞行可有效缩短对目标的反应时间,因此突防概率高; 2)射程相同时飞行时间短,目标位置变化小,故飞行器的抗干扰能力强,命中目标的概率高; 3)飞行器在高超声速飞行时动能大,若设计与亚声速飞行器相当破坏力的战斗部,高超声速飞行器战斗部的质量可以减轻,从而减小了飞行器的设计载荷; 4)射程远,如国外正在研究的高超声速导弹射程都在几百千米甚至几千千米以上。 1 高超声速飞行器国外发展现状 基于高超声速飞行器的上述优点,美、俄、法、德、日、印度等国都在进行这方面的研究,并制订了许多研制高超声速飞行器的计划[1-3] ,有些已经 做了大量的试验。 美国高超声速飞行器的研制在20世纪曾有过两次高潮:第一次是在20世纪60年代,当时研制了飞行器速度超过M a =6的X-15,但是由于使用 和经费上的困难以及技术上的难度,取消了该计划。而后对高超声速技术的研究一直处于小规模的水平。1986年,美国提出了国家空天飞机计划(NASP),当时人们称之为/高超声速技术复苏0,然而在1994年,由于在执行过程中遇到了技术、经费和管理上的一系列困难,对该计划进行了调整,但它却引发了一系列与高超声速飞行相关的研究计划。美国的高超声速技术研究重点围绕高超声速飞行器试验(H yper -X)计划、高超声速技术(H y Tech)计划和高超声速飞行(H yF l y )计划等技术验证计划
美国X-43高超声速飞行器调研
美国X-43高超声速飞行器调研 一、高超声速飞行器背景 (1) 1.1美国在高超声速技术领域独占鳌头 (1) 1.2 欧洲国家积极推进高超声速技术开发 (3) 1.3 日本实施高超声速飞行器发展计划 (4) 二、高超声速飞行器特点 (4) 2. 1 推进技术 (4) 2. 2 材料技术 (5) 2. 3 空气动力学技术 (5) 2. 4 飞行控制技术 (6) 2.5 X-43在技术方面有如下特显 (7) 三、气动外形设计方法 (8) 四、高超声速飞行器制导原理 (9) 五、执行机构的选择及配置 (12) 5.1 推进系统 (12) 5.2 控制系统的执行机构 (14) 六、X—43控制原理 (16) 6.1 高超声速控制技术发展 (16) 6.2 高超声速控制分析 (16) 6.3 X-43A控制方法及分析 (17) 6.4 高超声速控制技术新技术 (18) (1)非线性控制方法 (18) (2)鲁棒自适应控制方法 (19) 七、总结 (19)
一、高超声速飞行器背景 高超声速飞行器是指在大气层内飞行速度达到M a = 5以上的飞行器。自20世纪60年代以来, 以火箭为动力的高超声速技术已广泛应用于各类导弹和空间飞行器, 而目前世界各国正在积极发展另一类以吸气式发动机为动力的高超声速飞行器技术, 它的航程更远、结构质量轻、性能更优越。 实际上, 吸气式高超声速技术的发展始于20世纪50 年代,通过几十年的发展, 美国、俄罗斯、法国、德国、日本、印度、澳大利亚等国自20世纪90年代以来已在高超声速技术方面陆续取得了重大进展, 并相继进行了地面试验和飞行试验。高超声速技术实际上已经从概念和原理探索阶段进入了以高超声速巡航导弹、高超声速飞机和空天飞机等为应用背景的先期技术开发阶段。 1.1美国在高超声速技术领域独占鳌头 从1985 年至1994 年的10年间, 美国国家空天飞机计划(NASP)大大推动了高超声速技术的发展。通过试验设备的大规模改造和一系列试验, 仅美国NASA 兰利研究中心就进行了包括乘波体和超燃发动机试验在内的近3 200次试验。通过这些试验掌握了M a < 8的超燃发动机设计技术, 并建立了数据库, 从而为实际飞行器打下了牢固的技术基础。实际上, 30多年来, 兰利研究中心一直在进行这方面的研究, 曾经在2. 44 m高温风洞中研制和试验过22个发动机。在此基础上, 美国于1996 年开始, 针对高超声速导弹、高超声速飞机和空天飞机的研制工作调整高超声速技术的研究目标, 在发展和应用高超声速技术方面采取了更为稳妥的循序渐进策略,提出了更为现实的全方位的高超声速武器和先进航天器研制计划。NASA和美国空军在2000年12月达成协议, 将联合进行高超声速技术的发展和验证。 2001年, NASA和美国国防部联合提出了国家航空航天倡议(NAI) , 重申了美国高超声速飞行器的发展战略:近期发展高超声速巡航导弹;中期重点发展全球到达的高超声速飞机;远期发展廉价、快速、可重复使用的航天运载器。2001 年6 月到2004 年11月, NASA Hyper2X计划的X43A进行了3次飞行试验,除第一次以失败告终外, 第二次飞行试验实现了7倍声速飞行, 第三次在大约33. 5 km 高度飞行时以M a= 9. 8 (11 270 km /h)的惊人速度载入世界飞行速度记录。X43A 的成功飞行试验, 验证了高超声速飞行器的设计概念、设计方法和地面试验结果。但2006年年初NASA表示, 将把航空领域的研究重点从之前的飞行演示验证重新转向基础研究和设计工具开发, 同时, NASA对其组织结构进行调整,将高超声速研究纳入基础航空部分。X43高超声速研究小组的项目重点将进行基础性的技术研究而不是飞行试验。
国外吸气式高超声速飞行器发展现状
情报交流 本文2008 09 29收到,作者分别系中国航天科工集团第三研究院三一〇所工程师、助工、助工 国外吸气式高超声速飞行器发展现状 陈英硕 叶 蕾 苏鑫鑫 摘 要 以美国H yT ech 、H yF ly 、 X 51A 、猎鹰(FALCON )计划为重点,介绍了世界上几个主要的吸气式高超声速技术计划和飞行器研究情况,并对当前国外吸气式高超声速飞行器的发展现状进行了简要分析。 关键词 吸气式 高超声速 H yF ly X 51A FA LCON 引 言 高超声速飞行器是指在大气层内飞行速度达到M a =5以上的飞行器。自20世纪60年代以来,以火箭为动力的高超声速技术已广泛应用于各类导弹和空间飞行器,而目前世界各国正在积极发展另一类以吸气式发动机为动力的高超声速飞行器技术,它的航程更远、结构质量更轻、性能更优越。 实际上,吸气式高超声速技术的发展始于20世纪50年代,通过几十年的发展,美国、俄罗斯、法国、德国、日本、印度、澳大利亚等国自20世纪90年代以来已在高超声速技术方面陆续取得了重大进展,并相继进行了地面试验和飞行试验。高超声速技术实际上已经从概念和原理探索阶段进入了以高超声速巡航导 弹、高超声速飞机和空天飞机等为应用背景的先期技术开发阶段。 1 美国在高超声速技术领域独占鳌头 从1985年至1994年的10年间,美国国家空天飞机计划(NASP)大大推动了高超声速技术的发展。通过试验设备的大规模改造和一系列试验,仅美国NASA 兰利研究中心就进行了包括乘波体和超燃发动机试验在内的近3200次试验。通过这些试验掌握了M a <8的超燃发动机设计技术,并建立了数据库,从而为实际飞行器打下了牢固的技术基础。实际上,30多年来,兰利研究中心一直在进行这方面的研究,曾经在2.44m 高温风洞中研制和试验过22个发动机。在此基础上,美国于1996年开始,针对高超声速导弹、高超声速飞机和空天飞机的研制工作调整高超声速技术的研究目标,在发展和应用高超声速技术方面采取了更为稳妥的循序渐进策略,提出了更为现实的全方位的高超声速武器和先进航天器研制计划。NASA 和美国空军在2000年 12月达成协议,将联合进行高超声速技术的发展和验证。2001年,NASA 和美国国防部联合提出了国家航空航天倡议(NA I),重申了美国高超声速飞行器的发展战略:近期发展高超声速巡航导弹;中期重点发展全球到达的高超声速飞机;远期发展廉价、快速、可重复使用的航天运载器。 2001年6月到2004年11月,NAS A H yper X 计划的X 43A 进行了3次飞行试验,除第一次以失败告终外,第二次飞行试验实现了7倍声速飞行,第三次在大约33.5km 高度飞行时以M a =9.8(11270k m /h)的惊人速度载入世界飞行速度记录。X 43A 的成功飞行试验,验证了高超声速飞行器的设计概念、设计方法和地面试验结果。但2006年年初NASA 表示,将把航空领域的研究重点从之前的飞行演示验证重新转向基础研究和设计工具开发,同时,NASA 对其组织结构进行调整,将高超声速研究纳入基础航空部分。X 43高超声速研究小组的项目重点将进行基础性的技术研究而不是飞行试验。 下面就简要介绍一下美国开 25 飞航导弹 2008年第12期
高超声速空天飞行器研究现状汇总
高超声速空天飞行器研究现状 摘要 高超声速飞行器一般是指飞行马赫数大于5且能够在大气层和跨大气层中实现远程飞行的飞行器。这种飞行器在高度和速度上都具有相当大的优势,在军民领域具有巨大的应用潜力。高超声速飞行器是21世纪航空航天技术新的制高点,是航空史上继发明飞机、突破声障飞行之后第三个划时代的里程碑,同时也将开辟人类进入太空的新方式。本文首先阐述了高超声速空天飞行器的概念,强调了其主要的军事用途。其次,分析了空天飞行器的主要气动布局形式和特点。最后,对国外航空航天大国的空天飞行器相关发展情况进行了综述,包括美国、俄罗斯、澳大利亚和法国等国家。 1. 引言 未来的高超声速飞行器能够在2个小时之内到达地球任何地方,能够像普通的飞机一样水平起飞水平降落,并以廉价的成本完成天地往返的运输任务,从而可在空间控制和空间作战中发挥重要的作用,而这些要求的实现从根本上都取决于高超声速飞行器技术的发展。高超声速飞行器所具有的全球实时侦查、快速部署和远程精确打击能力,将改变未来战争的作战样式,对国家安全产生战略性的影响。高超声速飞行器还具有显著的军民两用性,能为民用运输和航天运载等领域提供全新的途径,进而对社会进步及国民经济产生带动作用。 2. 空天飞行器 随着现代科学技术的进步和未来战场的不断拓展,世界各国正在逐步把航空和航天飞行器朝着有机结合成一体的方向推进。空天飞行器是指既能够进入太空飞行,又能较长时间在大气层内飞行的一种飞行器。空天飞机是在航空和航天技术相结合方面的初步尝试,可实现航天运载系统的部分重复使用、提高操作效率和大幅度降低航天运输费用的目的,同时更具有广阔的军事运用前景。虽然目前单级入轨或多级入轨的空天飞机还处于探索研究阶段,但它可望成为世纪最先进、最经济有效的航天运载工具,代表了今后数十年内航天运载技术的发展方向,并且将成为未来控制空间、争夺制天权的关键武器装备之一。 空天飞行器的飞行过程可分成三段:一是发射上升段,二是轨道飞行段,三是再入返回段。对于发射上升段,从目前和未来相当长一段时间的技术水平来看,比较可行的方式还是依靠液体火箭或固体火箭。空天飞行器只是作为火箭的“乘
超高声速飞行器
超高声速飞行器 摘要:高超声速飞行器一般是指飞行速度超过5倍音速的飞机、导弹、炮弹之类的有翼或无翼飞行器,具有较高的突防成功率和侦查效能,能大大扩展战场空间。高超声速飞行器潜在的巨大军事和经济价值使得当前世界各军事大国纷纷投巨资到该领域,成为21世纪世界航空航天事业发展的一个主要方向。近年来,各军事大国在推进技术、结构材料、空气动力和飞行控制等关键技术研究方面积累了丰富经验,对高超声速飞行器未来的发展奠定了基础。 关键字:超高声速、飞行器、推进技术。 一、飞行器的发展历程 人类向往飞行的理想几乎伴随这整个人类的历史。最初,人们受到鸟类的启发而使用人造翅膀,但是发现这并不现实。人类的身体对于人造翅膀而言过于的沉重。并且在探索的早期人类并不了解鸟类飞行的空气动力学原理。 经过一系列的探索,到了18世纪后期,人类发明了热气球。1783年热气球首次载人升空。随后出现了飞艇。相比于热气球,带有推进装置、载重更大的飞艇更具实用性。 飞艇的出现并未宣告飞行器的发展并未就此停歇。人类还是研制机动性更好的飞行器。1903年,由莱特兄弟制造的人类第一架飞机——飞行者1号,并成功升空。莱特兄弟总共制造了三架“飞行者”号飞机。“飞行者”三号是其中最成功的一架,其飞行成绩为38分钟
飞行38.6km。“飞行者”三号飞机的成功宣布飞机终于具有了实用性。至此人类迎来的飞机时代。 自飞行者之后活塞式螺旋桨飞机得到了极大的发展,飞行时速不断地提高。但是螺旋桨式飞机存在着速度上限。当螺旋桨尖端线速度接近声速时,空气会被极具压缩,而这部分压缩空气来不及散开,在桨端形成一个巨大的阻力,称为激波阻力。此时桨端的空气将粘滞在桨叶表面,使螺旋桨的效率降低。这便是螺旋桨飞机不能飞得更快的原因。 为了克服螺旋桨飞机的这一速度上限,人们研制了喷气发动机。喷气发动机构造不同于活塞式螺旋桨,因此飞机可以飞得更快。随着发动机性能的提升以及飞行器气动外形的升级,飞机的速度已经能达到2马赫。性能与早期的飞机相比,现在的飞机已经将其远远的抛在了身后。 随着新的技术、新材料的不断应用,人造飞行器的性能还在不断的提升。 二、高超声速飞行器技术难点 在高超声速飞行器的研制过程中遇到许多困难,主要是飞行器的动力系统以及热防护等方面。这些方面直接关系到飞行器的性能和安全。 1、动力系统 1)喷气式发动机 战斗机动力装置的设计,总是追求更高的推重比;大型飞机自重
国外高超声速飞行器的发展及关键技术
国外高超声速飞行器的发展及关键技术 高超声速一般是指流动或飞行的速度超过5倍声速,即马赫数(Ma)大于或等于5。自20世纪60年代以来,以火箭为动力的高超声速技术已广泛应用于各类导弹和空间飞行器,而目前世界各国正在积极发展另一类以吸气式发动机为动力的高超声速飞行器技术。吸气式高超声速飞行器飞行时不需要像火箭那样自身携带氧化剂,可以直接从大气中吸取氧气,因而它的航程更远、结构重量更轻、性能更优越。实际上,吸气式高超声速技术的发展始于20世纪50年代,通过几十年的发展,美国、俄罗斯、法国、德国、日本、印度、澳大利亚等国自20世纪90年代以来已在高超声速技术方面陆续取得了重大进展,并相续进行了地面试验和飞行试验。高超声速技术已经从概念和原理探索阶段进入了以高超声速巡航导弹、高超声速飞机、跨大气层飞行器和空天飞机为应用背景的先期技术开发阶段。 一、国外高超声速飞行器的发展 1.美国 美国自20世纪50年代开始研究吸气式高超声速技术。20世纪80年代中期,美国实施了采用吸气式推进、单级入轨(马赫数25)的国家空天飞机计划(NASP),由于在技术、经费和管理方面遇到了一系列的困难,NASP计划于1995年停止。尽管如此,NASP计划仍然大大推动了美国高超声速技术的发展,仅美国航空航天局(NASA)兰利研究中心就进行了包括乘波外形一体化和超燃冲压发动机试验在内的近3200次试验。通过这些试验,美国已经基本上掌握了马赫数小于8的超燃冲压发动机设计技术,并建立了大规模的数据库,从而为实际飞行器的工程设计打下了牢固的技术基础。从1996年开始,美国对高超声速飞行器技术的发展进行了调整,确立了分阶段逐步发展的思路,降低了近期的发展目标。 目前,美国正在全方位发展高超声速飞行器技术,主要目标是研制马赫数小于8的高超声速巡航导弹(包括海军的高速打击导弹、空军的高超声速巡航导弹和国防高级研究计划局的“可负担得起的快速反应导弹”),同时实施以高超声速飞机为应用背景的高超声速飞行试验计划(Hyper一X)。此外,美国还正在开展高超声速轰炸机和单级入轨的吸气式航天运载器的研究。 2.俄罗斯 俄罗斯在高超声速技术领域仍处于世界领先地位。俄罗斯有多家机构长期致力于高超声速技术基础理论研究,在亚/超燃冲压发动机、C/H燃料、耐高温材料、CFD技术及一体化设计技术等方面取得了重大突破,并且已经进入了高超声速技术飞行验证阶段,1991~1998年,俄罗斯曾进行过5次轴对称超燃冲压发动机的验证性飞行试验,最大飞行速度达到6.5马赫,由于轴对称亚/超燃冲压发动机在工程应用上会带来较多问题,为了研究更接近于实际的飞行器布局,俄罗斯研制了先进的“彩虹”(RADUGA)高超声速试验飞行器(即D一2飞行器),其设计飞行速度为2.5~6马赫,飞行高度为15~30km。此外,俄罗斯还正在研制IGLA高超声速试验飞行器,飞行速度为6~14马赫,全长7.9m,翼展3.6m。氢燃料超燃冲压发动机由3个模块组成,总长1.9m,质量为200kg。IGLA飞行器已做了大量的地面试验和风洞吹风试验,但尚未进行飞行试验。 3.法国 自20世纪60年代以来,法国从未间断过高超声速技术研究。1992年,在国防部等单位领导下,法国制定了国家高超声速研究与技术(PREPHA)计划。PREPHA计划历时6年,最后研制了Chamois超燃冲压发动机,并在6马赫的速度下进行了反复试验。此外,法国还研制了另一种超燃冲压发动机,并于1999年成功地进行速度为7.5马赫的地面试验。目前,法国正在实施的高超声速技术发展计划主要有两个,即高超声速技术综合演示与超燃冲压发动机计划和Promethee空射型高超声速巡航导弹计划。前者是法国宇航公司与俄罗斯合作的研究计划,目的是研制一个高超声速技术综合演示器(Edith)和1台速度可达12马