汽车自巡航系统方案
汽车自动巡航控制系统(上)
随着社会的发展与进步,人们对汽车行驶安全性、舒适性的要求越来越高。为了满足人们的需求,汽车电子化程度也越来越高,特别是微处理器进入汽车控制领域后,给汽车发展带来了划时代的变化,汽车的动力性、操作稳定性、安全性、燃油经济性及尾气的排放都得到了大幅改善。
随着汽车工业和公路运输业的发展,以及非专业司机的不断增加,车辆驾驶的自动化己成为汽车发展的主要趋势之一。人们需要更加舒适、简便和安全的交通工具,以适应快速的生活节奏,因此对汽车智能化的要求更加迫切,汽车自动巡航控制系统可以有效地减轻长途驾驶的疲劳,是提高舒适性和趣味性的重要方法之一。
1 汽车自动巡航控制系统概述
1.1 国外汽车自动巡航技术发展现状
汽车自动巡航控制系统(Autonomous cruise Control System,Accs)是当汽车在高速公路上行驶时,驾驶员即使不踏加速踏板,汽车仍可以按驾驶员所希望的车速自动保持行驶功能。汽车自动巡航控制系统根据驾驶员设定的目标车速和车辆行驶阻力的变化,自动调节节气门开度,以使车辆达到按目标车速自动行驶的目的。汽车自动巡航控制系统除了维持车辆按驾驶员所希望的车速行驶外,还具备加速、减速和恢复的功能。在汽车自动巡航控制状态下,如果踏下制动踏板或操纵巡航控制取消开关,则可自动解除巡航功能,如果重新按下恢复开关,则恢复解除前的固定的车速。在巡航控制期间,随着道路坡度的变化以及汽车行驶所可能遇到的阻力,车辆自动变换节气门开度或自动进行档位转换,以按存储在微处理器的最佳燃料经济性规律或动力性规律稳定行驶。运用该系统可以减轻驾驶员因长时间控制节气门而产生的疲劳,从而减少或避免交通事故的发生;同时可避免不必要的节气门振动,从而改善了汽车的经济性;提高车流量和运输生产率,并在一定程度上提高了汽车的动力性和乘坐舒适性。
国外研发汽车自动巡航控制系统起步很早,其发展过程主要经历了三个阶段:
第一阶段是20世纪60~70年代中期,早期的汽车巡航控制系统主要是机械式和气动机械式巡航控制系统。例如,日本丰田公司从1965年起就开始在车上装用机械式巡航控制系统。之后,德国的VD0公司也研制出了气动机械式巡航控制系统。而1968年德国奔驰公司开发了晶体管控制的巡航控制系统,并在莫克利汽车上装用,这期间美国和日本相继出现了以模拟电路为基础的汽车巡航控制系统。
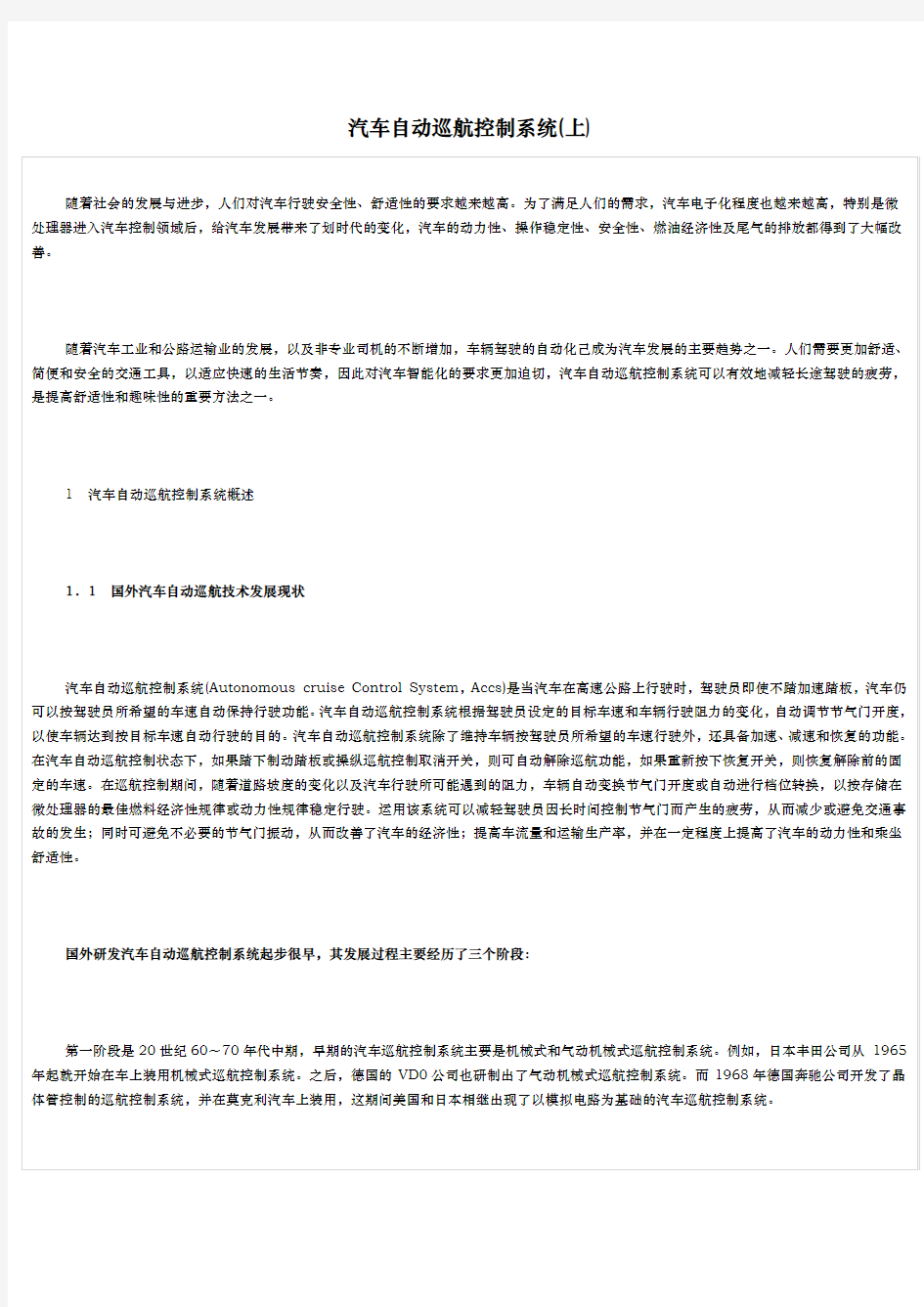
第二阶段是20世纪70年代中后期~80年代中后期,以数字信号为主的控制系统。随着单片机技术的发展,特别是大规模集成电路及单片机的应用,出现了以数字技术为基础的巡航控制系统。如1974年美国鲁卡斯汽车研究中心研究出了性能完善的运用卫星雷达的数字车速/车距控制系统,该系统可以更好地适应路面状况的变化。日本日野(Hino)公司于1985年投放市场一种基于燃油经济性的车速控制系统,其控制框图如图8-l所示。其控制部分的核心是微处理器。美国摩托罗拉公司也研制了一种采用微处理器控制的巡航控制系统,这种系统的所有输入指令以数字形式直接存储和处理,微处理器根据指令车速、实际车速以及其他输入信号,按给定程序完成所有数据处理,并产生步进电动机的驱动信号输出,改变节气门开度,每种车型的最佳加速度和减速度由编程人员决定。从安全上考虑,将制动开关与节气门执行器直接相连,这样当踩下制动踏板时,在断开巡航控制系统的同时,将执行器的动力源断开,从而使节气门迅速脱离巡航控制系统的控制。
与模拟技术相比,数字系统的突出特点是系统的信号量以数字表示,受工作温度和湿度的影响较小,因
此数字控制系统具有更高的稳定性。对于汽车自动巡航控制系统可采用先进的大规模或超大规模集成电路技
术做成专用模块,也可在微处理器上编程来实现。当汽车上其他系统已有控制微处理器时,只要修改一下程
序便可将此功能附加上去,因而可节省昂贵的硬件开支。
第三阶段,从20世纪90年代开始,国外又开始发展以智能化为核心的汽车自动巡航控制系统和以定距
离控制为主的自适应巡航控制系统。
1990年美国鲁卡斯公司研制出一种自动恒速智能控制系统,该系统采用了连续调频波雷达,通过雷达
旗轿车等均装有巡航控制系统。
由于国汽车起步较晚,并且就目前我国公路状况和实际应用来说,对汽车巡航控制系统的研究应用主要是以单车定速控制为主。目前,模拟汽车恒速控制器在我国已经投人生产和使用。例如:由省某巡航设备厂生产的XD-1型汽车定速系统是一种机电式汽车巡航控制系统。该系统用汽车发动机工作时产生的真空度作为动力,通过简单的机电结构来稳定发动机的转速,使其产生的真空度保持最小的变化。然而该机电式巡航控制装置虽然结构简单,却有控制精度不高、稳定性不强等缺点。
国有多所高校和科研单位从事汽车自动巡航控制系统的研究,控制系统的硬件核心部件采用不同型号的单片机,控制策略多采用PID调节方式,也有人将模糊控制算法应用于巡航控制系统,模仿驾驶员驾驶汽车的情况,根据目标车速与实际车速之间的偏差及路面情况,利用自己的经验,决定加速踏板的变化量,从而使汽车车速趋近于目标车速。用于汽车巡航控制的模糊控制器输入量一般可选择设定车速和实际车速的偏差以及偏差的变化率,模糊控制是不依赖系统的精确数学模型,因而对系统的参数不太敏感。其不足之处是模糊控制规则的获取和模糊隶属函数形状的确定,一旦系统确定,其规则和隶属函数就确定了,不能随外界和车辆参数变化进行调整。
1.2汽车自动巡航控制技术
为了使汽车巡航控制系统达到车速控制的要求,在单片机实时控制系统总体方案确定后,控制方案的选择非常关键,目前用于汽车巡航控制的控制方案主要有PID控制、模糊控制、迭代学习控制、自适应控制等,它们都有各自的特点。
控制的模糊控制器的输入量一般可选择设定车速与实际车速的偏差以及偏差的变化率。
模糊控制不依赖系统的精确数学模型,因而对系统的参数变化不敏感,其不足之处是模糊控制规则的获取和模糊隶属函数形状的确定是一项费力的工作,而且系统一旦确定,其规则和隶属函数就确定而不能随外界和车辆参数变化进行调整。
汽车自动巡航控制系统(下)
3.迭代学习控制
因为汽车巡航行驶中存在着严重的非线性和不确定性,特别是巡航控制参数在不同车速下其值是不确定的,并且运动载体对控制的实时性要求较高,所以有人将迭代学习算法应用到了汽车巡航控制系统中。基于迭代学习技术的汽车巡航控制原理如图8-3所示。利用实际车速与设定车速的偏差,通过多次的迭代计算得出一个修正量,进一步修正控制器输出的控制量,从而使实际车速更趋近于设定车速。
迭代学习控制可以对参数是未知的但是变化的或不变的系统实施有效控制。相对于其他控制技术,迭代学习控制的适应性更广,实时性更强。但其算法复杂,计算机编程困难。
4.自适应控制
由于汽车自动巡航控制系统是一个本质非线性系统,并且汽车在行驶过程中受到路面坡度、空气阻力等外界干扰,因而基于时不变系统得到的控制方法就难以在各种工况下取得良好的效果,解决的办法是加入自适应环节,其控制方法能随各种因素的变化而实时地加以调整,以适应复杂多变的行驶工况。
自适应控制是针对具有一定不确定性的系统而设计的。自适应控制方法可以自动监测系统的参数变化,从而时刻保持系统的性能指标为最优。目前用于汽车巡航控制的自适应控制主要为模型参考自适应控制。基于自适应控制的汽车巡航控制原理如图8-4所示。设定车速同时加到控制器和参考模型上,由于参考模型的理想车速和实际车速不一致,产生偏差,自适应机构检测到这一偏差后,经过一定的运算,产生适当的调整信号改变控制器参数,从而使实际车速迅速趋近于理想车速,当偏差趋于零时,自适应调整过程就停止,控制参数也就调整完毕。当汽车在行驶过程中遇到上下坡或是由于风力而使车速发生变化时,系统也如上述过
程一样,对控制器参数进行调整。
鉴于自适应控制的上述特点,自适应控制非常适合像汽车这样的一类非线性系统的控制。在控制过程中,系统能够自动调整控制参数,使得控制效果更好。
1.3汽车自动巡航控制系统的发展趋势
汽车自动巡航控制系统自20世纪70年代起各大汽车厂家都争相研制并装在较高级的轿车上,到了80年代中末期,由于微处理器在汽车上的广泛应用和高速公路建设的迅速发展,使得它更加完善。到20世纪末起以及目前展出的21世纪汽车,该系统真可谓日臻完善,系统电路集成化水平提高,控制模块体积精巧,多路传输系统日渐成熟,自检系统更准确有效。
但是若使该系统步人普通家用轿车家族,还存在着一些问题,即虽然系统多用模块控制,但造价昂贵;限速太高,一般系统都必须在40km/h以上才起作用;检修虽方便,但需较高的技术水平。
2)走停控制。现在对ACCS的研制和开发主要是针对在高速公路上高速行驶的车辆,而不适用于城市中低速、高车流密度情况下使用,走停控制正是ACCS针对车速低、车距近的行驶情况所做的功能扩展,这要求ACCS具有更好的近距离探测能力,更快的信号处理功能,更迅速的系统响应,同时还向ACCS提出了增加车辆的自动起步功能。这样即使在堵车情况下也无须驾驶员参与,只需操纵车辆的转向即可。驾驶员可以完全从烦琐的驾驶操作中解放出来;
3)随着近几年智能公路概念的提出以及卫星导航系统的开发与应用,未来的ACCS将同其他的汽车电控系统相互融合,形成智能汽车电子控制系统,驾驶这种汽车只需在显示器中指明所要到达的目的地,汽车就会在卫星导航系统的指引下,借助公路两旁的电子标志牌无需人为参与就可安全驶达目的地,实现完全的自动驾驶功能。
4)通过采用CAN总线技术,可实现信号资源的共享,减少硬件开支,提高系统的灵活性。
1.4汽车自动巡航控制系统的工作环境
人们知道,汽车的行驶是在发动机产生动力以后,借助于地面对车轮的反作用力行驶的。车速的变化情况非常复杂,会受到路面滚动阻力,汽车行驶时风的阻力,以及道路坡度等时变因素的影响而变化,而且也受到发动机工况、负荷情况等的影响。坡道的阻力是随着道路坡度大小而变化的,即使在高速公路上也不可能避免爬坡或下坡行驶,车重越大时,坡道的阻力就越大,下坡时的惯性力也就越大,而路面的滚动阻力系数也随路面的情况、轮胎形状、温度、气压、行车速度等变化而随机地变化,风阻与车速的二次方成正比,