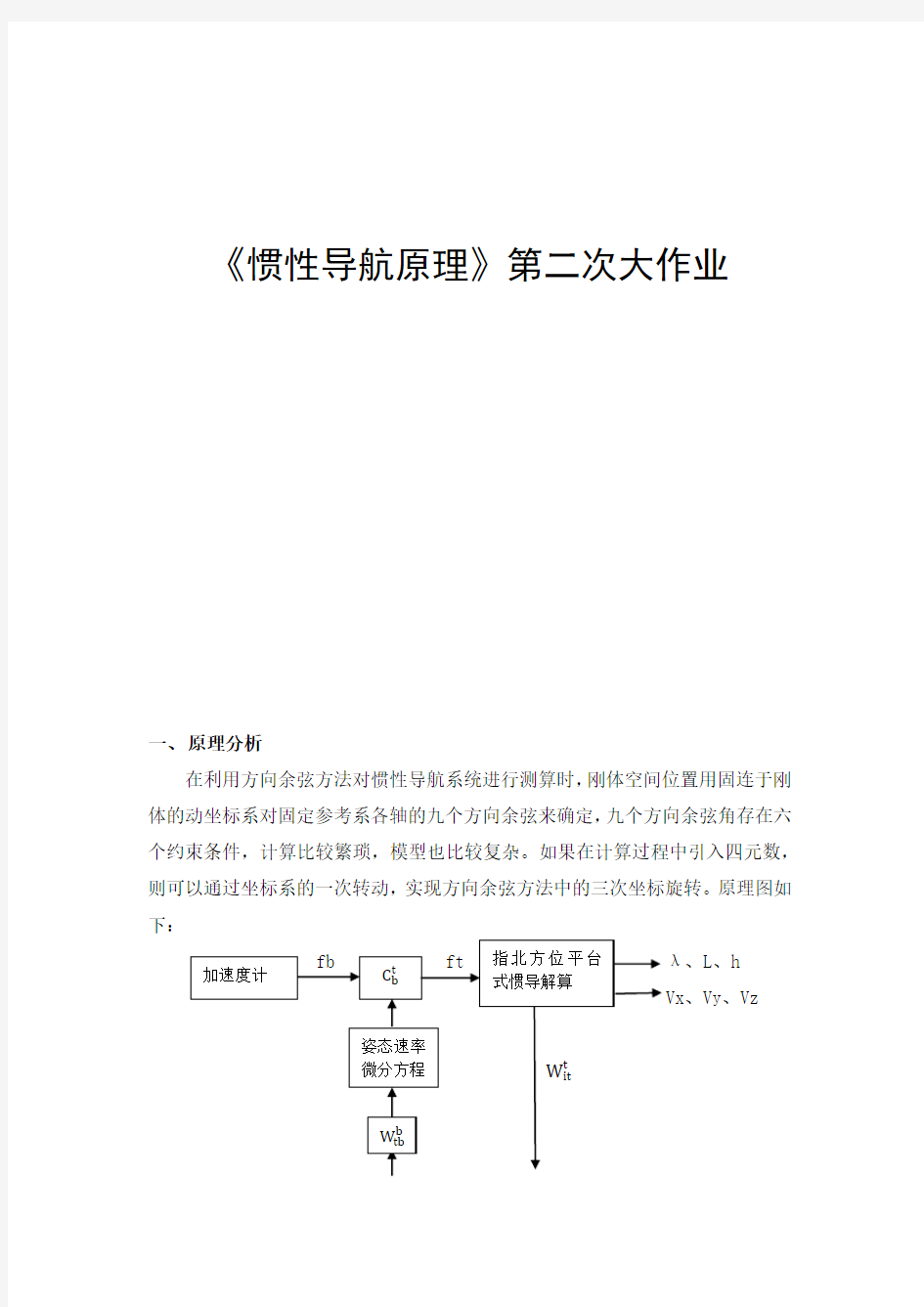
惯导第二次大作业

(完整版)离散数学作业答案一
离散数学作业7 离散数学数理逻辑部分形成性考核书面作业 本课程形成性考核书面作业共3次,内容主要分别是集合论部分、图论部分、 数理逻辑部分的综合练习,基本上是按照考试的题型(除单项选择题外) 安排练习题目,目的是通过综合性书面作业,使同学自己检验学习成果,找出掌握的薄弱知识点,重点复习,争取尽快掌握。本次形考书面作业是第三次作业,大家要认真及时地完成数理逻辑部分的综合练习作业。 要求:将此作业用A4纸打印出来,手工书写答题,字迹工整,解答题要有解答过程,要求本学期第17周末前完成并上交任课教师(不收电子稿)。并在07任务界面下方点击“保存”和“交卷”按钮,以便教师评分。 一、填空题 1 .命题公式P (Q P)的真值是T或1 ______ . 2?设P:他生病了,Q:他出差了. R:我同意他不参加学习.则命题“如果他生病或出差了,我就同意他不参加学习”符号化的结果为(P V Q)-R 3. ____________________________________________________________ 含有三个命题变项P,Q,R的命题公式P Q的主析取范式是__________________ _(P Q R) (P Q R)_ 4. 设P(x): x是人,Q(x): x去上课,则命题“有人去上课.” 可符号化为— x(P(x) Q(x))_ 5. 设个体域D = {a, b},那么谓词公式xA(x) yB(y)消去量词后的等值式为 (A(a) A(b)) (B(a) B(b))_ 6 .设个体域D = {1,2, 3},A(x)为“x大于3”,则谓词公式(x)A(x)的真值为F 或0 ________________ . 7.谓词命题公式(x)((A(x) B(x)) C(y))中的自由变元为 ________ . 8 .谓词命题公式(x)(P(x) Q(x) R(x,y))中的约束变元为x _______ . 三、公式翻译题 1 .请将语句“今天是天晴”翻译成命题公式
第二次作业
1 Divide and Conquer A group of n Ghostbusters is battling n ghosts. Each Ghostbuster is armed with a proton pack, which shoots a stream at a ghost, eradicating it. A stream goes in a straight line and terminates when it hits the ghost. The Ghostbusters decide upon the following strategy. They will pair off with the ghosts, forming n Ghostbuster-ghost pairs, and then simultaneously each Ghostbuster will shoot a stream at his chosen ghost. As we all know, it is very dangerous to let streams cross, and so the Ghostbusters must choose pairings for which no streams will cross. Assume that the position of each Ghostbuster and each ghost is a fixed point in the plane and that no three positions are collinear. i Argue that there exists a line passing through one Ghostbuster and one ghost such the number of Ghostbusters on one side of the line equals the number of ghosts on the same side. Describe how to find such a line in O(n log n) time. ii Give an O(n2 log n)-time algorithm to pair Ghostbusters with ghosts in such a way that no streams cross. Answer: i -ii: We assume that all the points in the plane are not in same X or Y axis using mark to stand for ghostbuster or ghosts(mark 0 stand for ghostbuster and mark 1 stand for ghosts).(This can not affect the problem because when we get the same X or Y , we can add or minus a very little value to let all points’ X or Y are not same). First we get the deepest point (in other word, the minimum Y value). Also we compute the other points with this point ‘s angle in X axis and sort these other points with this angle. Then we iterate in this order, and get another mark which is different from the deepest point's mark also we line this two point ,and compute the bottom mark 0 's number and mark 1's number, they are the same , then we find the pair which is the deepest point and the iterate point. So we use this line to divide all points into two parts and recursive do the same above operation until the points' number is only 2 then we only get the line to connect this two points. Algorithm: Get_Pair(points[1-2N]) if N>1 initial a array points[1-2N] stand for the points of ghostbusters and ghosts find the deepest point min_Point in the array points initial the pair_Point and the index with 0 get the other 2N-1 points with this min_Point 's angle in X axis and sort these angles initial num1 with 0 stand for the number of the other 2N-1 points which's mark is same with min_Point initial num2 with 0 stand for the number of the other 2N-1 points which's mark is not same with min_Point for i=1 to 2N-1 if min_Point's mark is same with points[i]'s mark num1++ else num2++ endif if num1+1==num2
惯性导航作业
惯性导航作业
一、数据说明: 1:惯导系统为指北方位的捷连系统。初始经度为116.344695283度、纬度为39.975172度,高度h为30米。初速度 v0=[-9.993908270;0.000000000;0.348994967]。 2:jlfw中为600秒的数据,陀螺仪和加速度计采样周期分别为为1/100秒和1/100秒。 3:初始姿态角为[2 1 90](俯仰,横滚,航向,单位为度),jlfw.mat中保存的为比力信息f_INSc(单位m/s^2)、陀螺仪角速率信息wib_INSc(单位rad/s),排列顺序为一~三行分别为X、Y、Z向信息. 4: 航向角以逆时针为正。 5:地球椭球长半径re=6378245;地球自转角速度wie=7.292115147e-5;重力加速度g=g0*(1+gk1*c33^2)*(1-2*h/re)/sqrt(1-gk2*c33^2); g0=9.7803267714;gk1=0.00193185138639;gk2=0.00669437999013;c33=sin(lat纬度); 二、作业要求: 1:可使用MATLAB语言编程,用MATLAB编程时可使用如下形式的语句读取数据:load D:\...文件路径...\jlfw,便可得到比力信息和陀螺仪角速率信息。用角增量法。 2:(1) 以系统经度为横轴,纬度为纵轴(单位均要转换为:度)做出系统位置曲线图; (2) 做出系统东向速度和北向速度随时间变化曲线图(速度单位:m/s,时间单位:s); (3) 分别做出系统姿态角随时间变化曲线图(俯仰,横滚,航向,单位转换为:度,时间单位:s); 以上结果均要附在作业报告中。 3:在作业报告中要写出“程序流程图、现阶段学习小结”,写明联系方式。
机械原理大作业
机械原理大作业 This model paper was revised by the Standardization Office on December 10, 2020
机械原理大作业三 课程名称:机械原理 设计题目:齿轮传动设计 院系: 班级: 设计者: 学号: 指导教师: 设计时间: 1、设计题目 机构运动简图 机械传动系统原始参数
2、传动比的分配计算 电动机转速min /745r n =,输出转速m in /1201r n =,min /1702r n =, min /2303r n ,带传动的最大传动比5.2max =p i ,滑移齿轮传动的最大传动比4m ax =v i ,定轴齿轮传动的最大传动比4m ax =d i 。 根据传动系统的原始参数可知,传动系统的总传动比为: 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为5.2max =p i ,滑移齿轮的传动比为321v v v i i i 、、,定轴齿轮传动的传动比为f i ,则总传动比 令 4max 1==v v i i 则可得定轴齿轮传动部分的传动比为 滑移齿轮传动的传动比为 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9和10为角度变位齿轮,其齿数: 35,18,39,14,43,111098765======z z z z z z ;它们的齿顶高系数1=* a h ,径向间 隙系数25.0=*c ,分度圆压力角020=α,实际中心距mm a 51'=。
小学四年级寒假作业答案完整版
精心整理 小学四年级寒假作业答案完整版 【练习一】 1.判断题 ) (10)√(没有空气传播) 2.不能溶解的物质是:面粉、油菜、土块 3.小实验
提示:做小实验时尽量多放点食盐,选择的瓶子也尽量小瓶口,这样观察结果会明显些。 结果说明:食盐量多,瓶口小,则水面上升明显些;食盐量少,瓶口大,则水面上升不明显,但原理上也是增加的,水面也是会上升的。 3.小实验 (1)自制吹管乐器原理说明 试管:水位低,试管震动快,发出声音高。反之,水位高,试管震动慢,发出声音低。(图上所示应该是音高音低)
吸管:空气柱短,振动快,发出声音高;空气柱长,振动慢,发出声音低。(图上所示应该是音高音低) (2)小活动 盐水升温灯泡变亮,盐水降温灯泡变暗。原因是盐水升温加快分 (3)×好吃的食物营养不一定丰富。比如:肯德基 (4)√ (5)√ 2.选择题
(1)A(2)C(3)B(4)A 3.小资料:跟日常饮食很有关系,希望多去了解了解。 4.调查生活中岩石的用途 如铺路;筑坝;筑成石屋、围墙或做其它建材;做摆设或配饰; 这里提供的5条浙江民间气象谚语读读背背默默。 语文书三年级下册语文园地六P104,四年级下册语文园地三P50,共有11条学过的气象谚语,翻翻看看,读读背背,默写整理在表格中。
【练习五】 1.判断题 (1)√ (2)√ 成。 ) 燕草,霞草等等。 表格举例如下:荷花粉红叶盾圆形香大17112 忍冬白或黄合瓣二唇形清香中515 野百合白离瓣清香中613
4.小实验观察记 记录说明: 植物的叶子具有向阳性,后来的几天观察应该会发现:幼苗向着开口处生长。 3.观察与比较 蝴蝶和蜘蛛在身体特征上的异同点 蝴蝶①身体分头、胸、腹三部分 ②头上有两对触角,虹吸式口器
完整版上海交大统计学原理第二次作业及答案
1.同时抛两枚不同的硬币,恰有一枚正面朝上的概率是()(单选) 选择一项: 炒a. 1 炒b. 1/8 O c. 1/4 同d. 1/2 2.对于连续型数据的分组()选择一项: a.水平法 b.累计法 c.推算法 d.直接法 ) 4.各变量值与其算术平均数的离差值和等于(选择一 项: a.最小值 C b.取大值 c.各变量值的算术平均数 d.零 ) 5.下列统计指数,不属于数量指标指数的有(选择一 项: a.零售价格指数
b. 产量指数 诃c?收购量指数 因d.工资总额指数 6. 以下分组标志中属于品质标志的是()(多选) 选择一项或多项: * a.性别 □ b.年龄 "c.职业 d.月收入 门e.职称 7. 我国2003年国内生产总值比上年增长了9.1%,这个指标是() (单选)选择一项: U a.发展速度 拥b.增长速度 目c.发展水平 d.增长量 8. 统计指数区分数量指标指数与质量指标指数,是依据()(单选) 选择一项: 炒a.对比基期的不同 °b.对象范围的大小 ⑥c.统计指标的性质不同 d.同度量因素的固定与否 9. 我国财政收入,2003年比上年增加2787亿元,这是()(单选)选择一项: 炒a.发展水平 b.增长量
炒a.两个数列的平均数代表性相同 °b.平均数的代表性甲数列高于乙数列 同c.平均数的代表性乙数列高于甲数列 口d.平均数的代表性无法判断 11.全年12个月的季节比率之和应是()(单选) 选择一项: 」a.标准差系数 b.平均差系数 ‘ c.全距 * d.平均差
」a.是不同情况下同一指标对比的比率 □ b.反映现象的强度、密度和普遍程度 巫c. 一般有正指标与逆指标之分 門d.是两个性质不同而有密切联系的总量指标对比的结果 "e. 一般是以有名数表示的,但也有采用千分数等形式表示的 15.下列现象的相关密切程度最高的是()(单选)选择一项: a. 某商店的职工人数与商品销售额之间的相关系数0.87 * b.流通费用水平与利润率之间的相关关系为-0.94 口c.商品销售额与利润率之间的相关系数为0.51 口d.商品销售额与流通费用水平的相关系数为-0.81 16在实验中,两个事件有一个发生时,另一个就不发生,称这两个事件()(单选)选择一项: ⑥a.互斥事件 口b.必然事件 c. 独立事件 d. 不可能事件 17. 两组数据的均值不等,但标准差相等,则()(单选) 选择一项:
北航惯性导航综合实验五实验报告
惯性导航技术综合实验 实验五惯性基组合导航及应用技术实验
惯性/卫星组合导航系统车载实验 一、实验目的 ①掌握捷联惯导/GPS组合导航系统的构成和基本工作原理; ②掌握采用卡尔曼滤波方法进行捷联惯导/GPS组合的基本原理; ③掌握捷联惯导 /GPS组合导航系统静态性能; ④掌握动态情况下捷联惯导 /GPS组合导航系统的性能。 二、实验内容 ①复习卡尔曼滤波的基本原理(参考《卡尔曼滤波与组合导航原理》第二、五章); ②复习捷联惯导/GPS组合导航系统的基本工作原理(参考以光衢编著的《惯性导航原理》第七章); 三、实验系统组成 ①捷联惯导/GPS组合导航实验系统一套; ②监控计算机一台。 ③差分 GPS接收机一套; ④实验车一辆; ⑤车载大理石平台; ⑥车载电源系统。 四、实验内容 1)实验准备 ①将IMU紧固在车载大理石减振平台上,确认IMU的安装基准面紧靠实验平台; ②将IMU与导航计算机、导航计算机与车载电源、导航计算机与监控计算
机、GPS 接收机与导航计算机、GPS 天线与GPS 接收机、GPS 接收机与GPS 电池之间的连接线正确连接; ③ 打开GPS 接收机电源,确认可以接收到4颗以上卫星; ④ 打开电源,启动实验系统。 2) 捷联惯导/GPS 组合导航实验 ① 进入捷联惯导初始对准状态,记录IMU 的原始输出,注意5分钟内严禁移动实验车和IMU ; ② 实验系统经过5分钟初始对准之后,进入导航状态; ③ 移动实验车,按设计实验路线行驶; ④ 利用监控计算机中的导航软件进行导航解算,并显示导航结果。 五、 实验结果及分析 (一) 理论推导捷联惯导短时段(1分钟)位置误差,并用1分钟惯导实验数据验证。 1、一分钟惯导位置误差理论推导: 短时段内(t<5min ),忽略地球自转0ie ω=,运动轨迹近似为平面1/0R =,此时的位置误差分析可简化为: (1) 加速度计零偏?引起的位置误差:2 10.88022t x δ?==m (2) 失准角0φ引起的误差:2 02 0.92182g t x φδ==m (3) 陀螺漂移ε引起的误差:3 30.01376 g t x εδ==m 可得1min 后的位置误差值123 1.8157m x x x x δδδδ=++= 2、一分钟惯导实验数据验证结果: (1)纯惯导解算1min 的位置及位置误差图:
专业点题北航机械原理
一、齿轮传动的基本概念 渐开线齿轮的啮合特点:(1)渐开线齿廓能够保证定传动比;(2)渐开线齿廓之间的正压力方向不变;(3)渐开线齿廓传动具有可分性。 齿轮机构的特点是:传动平稳、适用范围广、效率高、结构紧凑、工作可靠、寿命长。但制造和安装精度高、制造费用大,且不适合于距离较远的两轴之间的传动。齿轮传动可以用来传递任意轴间的运动和动力。 齿轮传动按照一对齿轮传递的相对运动分为平面齿轮传动和空间齿轮传动,平面齿轮传动又分为直齿圆柱齿轮传动、斜齿圆柱齿轮传动和人字齿轮传动;按照工作条件可以分为开式传动、半开式传动和闭式传动。 齿轮传动的基本要求是:传动准确、平稳;承载能力强。 二、齿轮传动的设计与计算 齿廓曲线与齿廓啮合基本定律:在啮合传动的任一瞬时,两轮齿廓曲线在相应接触点的功法线必须通过按给定传动比确定的该瞬时的节点。 渐开线齿轮啮合的正确条件:啮合轮齿的工作侧齿廓的啮合点必须总是在啮合线上,即两齿轮的模数和压力角应该分别相等。 齿轮传动的无侧隙啮合及标准齿轮的安装:一个齿轮节圆上的齿厚等于另一个齿轮节圆上的齿槽宽是无侧隙啮合的条件;外啮合齿轮的标准中心距为,内啮合是标准中心距为。
齿轮及其变位的相关计算:相关参数为齿数、模数、分度圆压力角、齿顶高系数和顶隙系数及标准直齿轮的几何尺寸计算,包括分度圆直径、齿顶高、齿根高、齿全高、齿顶圆直径、齿根圆直径、基圆直径、齿距、齿厚、齿槽宽、中心距、顶隙以及变位齿轮的变位系数等。 渐开线齿轮的根切现象:用展成法加工齿轮式,若刀具的齿顶线或齿顶圆与啮合线的焦点超过被切齿轮的极限点,则刀具的齿顶会将被切齿轮的齿根的渐开线齿廓切去了一部 分。避免根切的最小齿数,用标准齿条刀具切制标准齿轮时,因为 ,最少齿数为17。 三、机构的组成 构件指独立的运动单元,两个构件直接接触组成仍能产生某些相对运动的连接叫运动副。运动副按照相对运动的范围可以分为平面运动副和空间运动副;按运动副元素分为:低副-面接触、应力低;高副-点接触或线接触,应力高。其中运动副元素是只形成运动副的组建之间直接接触的部分。 四、机构自由度的计算 机构相对于机架所具有的独立运动的数目,叫机构的自由度。设一个平面机构由N个构件组成,其中必定有一个构件为机架,其活动构件数为n=N-1.设机构共有个低副、 个高副,因为在平面机构中每个低副和高副分别限制两个自由度和一个自由度,故平面机构的自由度为。在计算平面机构的自由度时,应该注意三种特殊情况:(1)复合铰链:三个或更多的构件在同一处联接成同轴线的两个或更多个转动副,就构成了复合铰链,计算自由度时应该按照两个或更多个运动副计算。(2)局部自由度:在有些机构中,为了其他一些非运动的原因,设置了附加机构,这种附加机构的运动是完全独立的,对整个
大学英语作业答案完整版
Exercises 1.When and where shall we ___A____. A.meet B. met C. to meet D. meeting A.You __D_____show more respect for your elders. A.can B. could C. would D. must 3. It is necessary that I ___D____ return the books to him tomorrow. A. will B. can C. may D. should 4. She __B_____ to school by school bus at eight in the morning. A. go B. goes C. went D. gone 5. What __C_____the notice say? A. is, say B. is, said C. did, say D. does, say 6. I’ll tell her after Ruby __B____. A. leave B. leaves C. left D. is leaving 7. We __D_____ the result tomorrow. A. know B. knew C. has known D. will know 8. On November 1 we __D_____ in this house for thirty years. A. live B. will have C. are living D. will have been living 9. It __B_____ to rain soon. A. is B. is going C. will D. shall 10. Mary ___C_____ a dress when she cut her finger.
(完整版)南大网院投资学概论第二次作业答案
作业名称:投资学概论第2次作业出卷人:SA作业总分:100通过分数:60 学员成绩:100标准题总分:100标准题得分:100详细信息: 题号:1题型:多选题(请在复选框中打勾,在以下几个选项中选择正确答案,答案可以是多个)本题分数:2.08内容: 基础分析包括了()A、宏观分析B、行业分析C、公司分析D、股票价格分析 学员答案:ABC本题得分:2.08 题号:2题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:2.08内容: 下列哪项不是上市公司主要财务报表()A、存货表B、损益表C、现金流量表D、资产负债表 学员答案:A本题得分:2.08 题号:3题型:判断题本题分数:2.08内容: K线图是把每个交易日某个证券的开盘价、收盘价、最高价、最低价的所有变动情况全部记录下来,然后绘成的像蜡烛状的图形1、错2、对 学员答案:2本题得分:2.08 题号:4题型:判断题本题分数:2.08内容: 进行基本分析的假设前提是市场尚未达到半强势有效1、错2、对 学员答案:2本题得分:2.08 题号:5题型:多选题(请在复选框中打勾,在以下几个选项中选择正确答案,答案可以是多个)本题分数:3.12内容: 关于信用交易,下面说法正确的是()A、信用交易包括了买空交易和卖空交易 B、买空交易是指投资者向证券公司借资金去购买比自己投入资本量更多的证券 C、卖空是指投资者交纳一部分保证金,向经纪商借证券来出售,待证券价格下跌后再买回证券交给借出者 D、投资者进行信用交易时完全不必使用自有资金 学员答案:ABC本题得分:3.12 题号:6题型:多选题(请在复选框中打勾,在以下几个选项中选择正确答案,答案可以是多个)本题分数:2.08内容: 下列哪些是证券市场上禁止的交易行为()A、套利B、欺诈C、内幕交易D、操纵市场 学员答案:BCD本题得分:2.08 题号:7题型:多选题(请在复选框中打勾,在以下几个选项中选择正确答案,答案可以是多个)本题分数:2.08内容: 在指令驱动市场中,包括了下列哪些指令类型()A、市价指令B、限价指令C、止损指令D、止损限价指令 学员答案:ABCD本题得分:2.08 题号:8题型:多选题(请在复选框中打勾,在以下几个选项中选择正确答案,答案可以是多个)本题分数:3.12内容: 市场监管的原则包括()A、公开原则 B、保护投资者利益原则 C、公平原则 D、公正原则 学员答案:ACD本题得分:3.12 题号:9题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:2.08内容: 1月1日,某投资者向经纪商借1000元,购买40元/股的股票100股,保证金率为75%。在1月15日时,若股票价格为30元/股,则保证金率为()A、50%B、75%C、66.7%D、80% 学员答案:C本题得分:2.08
北航惯性导航综合实验四实验报告
基于运动规划的惯性导航系统动态实验 二零一三年六月十日
实验4.1 惯性导航系统运动轨迹规划与设计实验 一、实验目的 为进行动态下简化惯性导航算法的实验研究,进行路径和运动状态规划,以验证不同运动状态下惯导系统的性能。通过实验掌握步进电机控制方法,并产生不同运动路径和运动状态。 二、实验内容 学习利用6045B 控制板对步进电机进行控制的方法,并控制电机使运动滑轨产生定长运动和不同加速度下的定长运动。 三、实验系统组成 USB_PCL6045B 控制板(评估板)、运动滑轨和控制计算机组成。 四、实验原理 IMU安装误差系数的计算方法 USB_PCL6045B 控制板采用了USB 串行总线接口通信方式,不必拆卸计算机箱就可以在台式机或笔记本电脑上进行运动控制芯片PCL6045B 的学习和评估。 USB_PCL6045B 评估板采用USB 串行总线方式实现评估板同计算机的数据交换,由评估板的FIFO 控制回路完成步进电机以及伺服电机的高速脉冲控制,任意2 轴的圆弧插补,2-4 轴的直线插补等运动控制功能。USB_PCL6045B 评估板上配置了全部PCL6045B 芯片的外部信号接口和增量编码器信号输入接口。由 USB_PCL6045B 评估测试软件可以进行PCL6045B 芯片的主要功能的评估测试。
图4-1-1USB_PCL6045B 评估板原理框图 如图4-1-1 所示,CN11 接口主要用于外部电源连接,可以选择DC5V 单一电源或DC5V/24V 电源。CN12 接口是USB 信号接口,用于USB_PCL6045B 评估板同计算机的数据交换。 USB_PCL6045B 评估板已经完成对PCL6045B 芯片的底层程序开发和硬件资源与端口的驱动,并封装成156 个API 接口函数。用户可直接在VC 环境下利用API 接口函数进行编程。 五、实验内容 1、操作步骤 1)检查电机驱动电源(24V) 2)检查USB_PCL6045B 控制板与上位机及电机驱动器间的连接电缆 3)启动USB_PCL6045B 控制板评估测试系统检查系统是否正常工作。 4)运行编写的定长运动程序,并比较实际位移与设定位移。
哈工大机械原理大作业凸轮机构第四题
Harbin Institute of Technology 机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 姓名:李清蔚 学号:1140810304 班级:1408103 指导教师:林琳
一.设计题目 设计直动从动件盘形凸轮机构,其原始参数见表 1 表一:凸轮机构原始参数 升程(mm ) 升程 运动 角(o) 升程 运动 规律 升程 许用 压力 角(o) 回程 运动 角(o) 回程 运动 规律 回程 许用 压力 角(o) 远休 止角 (o) 近休 止角 (o) 40 90 等加 等减 速30 50 4-5-6- 7多 项式 60 100 120
二.凸轮推杆运动规律 (1)推程运动规律(等加速等减速运动) 推程F0=90° ①位移方程如下: ②速度方程如下: ③加速度方程如下: (2)回程运动规律(4-5-6-7多项式) 回程,F0=90°,F s=100°,F0’=50°其中回程过程的位移方程,速度方程,加速度方程如下:
三.运动线图及凸轮线图 本题目采用Matlab编程,写出凸轮每一段的运动方程,运用Matlab模拟将凸轮的运动曲线以及凸轮形状表现出来。代码见报告的结尾。 1、程序流程框图 开始 输入凸轮推程回 程的运动方程 输入凸轮基圆偏 距等基本参数 输出ds,dv,da图像 输出压力角、曲率半径图像 输出凸轮的构件形状 结束
2、运动规律ds图像如下: 速度规律dv图像如下: 加速度da规律如下图:
3.凸轮的基圆半径和偏距 以ds/dfψ-s图为基础,可分别作出三条限制线(推程许用压力角的切界限D t d t,回程许用压力角的限制线D t'd t',起始点压力角许用线B0d''),以这三条线可确定最小基圆半径及所对应的偏距e,在其下方选择一合适点,即可满足压力角的限制条件。 得图如下:得最小基圆对应的坐标位置O点坐标大约为(13,-50)经计算取偏距e=13mm,r0=51.67mm.
第二次作业完整版
【15-16(1)】第十一章 稳恒电流的磁场(二) 姓名________序号____________ 一. 选择题 1、【 】基础训练 2、三条无限长直导线等距地并排安放,导线Ⅰ、Ⅱ、Ⅲ分别载有1 A ,2 A ,3 A 同方向的电流.由于磁相互作用的结果,导线Ⅰ,Ⅱ,Ⅲ单位 长度上分别受力F 1、F 2和F 3,如图所示.则F 1与F 2的比值是: (A) 7/16. (B) 5/8. (C) 7/8. (D) 5/4. 2、【 】基础训练6、两个同心圆线圈,大圆半径为R ,通有电流I 1;小圆半径为r ,通有电流I 2,方向如图.若r << R (大线圈在小线圈处产生的磁场近似为均匀磁场),当它们处在同一平面内时小线圈所受磁力矩的大小为 (A) R r I I 22 210πμ. (B) R r I I 22 210μ. (C) r R I I 22 210πμ. (D) 0. 3、【 】自测提高2、一电子以速度v 垂直地进入磁感强度为B 的均匀磁场中,此电子在磁场中运动轨道所围的面积内的磁通量将 (A) 正比于B ,反比于 v 2. (B) 反比于B ,正比于v 2. (C )正比于B ,反比于v . (D) 反比于B ,反比于v . 4、【 】自测提高3、有两个半径相同的圆环形载流导线A 、B ,它们可以自由转动和移动,把它们放在相互垂直的位置上,如图 所示,将发生以下哪一种运动? (A) A 、B 均发生转动和平动,最后两线圈电流同方向并紧靠一起. (B) A 不动,B 在磁力作用下发生转动和平动. (C) A 、B 都在运动,但运动的趋势不能确定. (D) A 和B 都在转动,但不平动,最后两线圈磁矩同方向平行. 5、【 】自测提高4、一个动量为p 的电子,沿图所示方向入射并能穿 过一个宽度为D 、磁感应强度为B (方向垂直纸面向外)的均匀磁场区域, F 1F 2F 3 1 A 2 A 3 A ⅠⅡⅢ
北航惯性导航大作业
惯性导航基础课程大作业报告(一)光纤陀螺误差建模与分析 班级:111514 姓名: 学号 2014年5月26日
一.系统误差原理图 二.系统误差的分析 (一)漂移引起的系统误差 1. εx ,εy ,εz 对东向速度误差δVx 的影响 clc;clear all; t=1:0.01:25; g=9.8; L=pi/180*39; Ws=2*pi/84.4*60; Wie=2*pi/24; R=g/(Ws)^2; e=0.1*180/pi; mcVx1=e*g*sin(L)/(Ws^2-Wie^2)*(sin(Wie*t)-Wie*sin(Ws*t)/Ws); mcVx2=e*((Ws^2-(Wie^2)*((cos(L))^2))/(Ws^2-Wie^2)*cos(Ws*t)-(Ws^2)*((sin(L))^2)*cos(Wi e*t)/(Ws^2-Wie^2)-(cos(L))^2); mcVx3=(sin(L))*(cos(L))*R*e*((Ws^2)*cos(Wie*t)/(Ws^2-Wie^2)-(Wie^2)*cos(Ws*t)/(Ws^2-Wi e^2)-1); plot(t,[mcVx1',mcVx2',mcVx3']); title('Ex,Ey,Ez 对Vx 的影响'); xlabel('时间t'); ylabel('Vx(t)'); 0,δλδL ,v v δδ
legend('Ex-mcVx1','Ey-mcVx2','Ez-mcVx3'); grid; axis square; 分析:εx,εy,εz对东向速度误差δVx均有地球自转周期的影响,εx,εy还会有舒勒周期分量的影响,其中,εy对δVx的影响较大。 2.εx,εy,εz对东向速度误差δVy的影响 clc;clear all; t=1:0.01:25; g=9.8; L=pi/180*39; Ws=2*pi/84.4*60; Wie=2*pi/24; R=g/(Ws)^2; e=0.1*180/pi; mcVy1=e*g*(cos(Wie*t)-cos(Ws*t))/(Ws^2-Wie^2); mcVy2=g*sin(L)*e/(Ws^2-Wie^2)*(sin(Wie*t)-Wie/Ws*sin(Ws*t)); mcVy3=g*cos(L)*e/(Ws^2-Wie^2)*(sin(Wie*t)-Wie/Ws*sin(Ws*t)); plot(t,[mcVy1',mcVy2',mcVy3']); title('Ex,Ey,Ez对Vy的影响'); xlabel('时间t'); ylabel('Vy(t)'); legend('Ex-mcVy1','Ey-mcVy2','Ez-mcVy3'); grid; axis square;
(完整版)机织学作业答案
4.什么是投梭力、投梭时间? 答:投梭力一般用投梭动程表示,投梭动程是指织机由静止状态被人工缓缓转动其主轴,皮结推动梭子移过的距离。 投梭时间指的是:织机运转中,投梭转子与投梭鼻开始接触时主轴的位置角。 5. 有梭织机制梭的要求是什么?制梭有哪几个阶段? 答:答:有梭织机制梭的要求是:(1)梭子定位良好,不宜紧贴皮结,也不宜远离皮结;(2)制梭动作要缓和,以免产生脱纬;(3)制梭装置各部件负荷均匀,减少机物料消耗;(4)制梭噪音低。 制梭过程可分为三个阶段: (1)梭子进梭箱,与制梭铁斜碰撞制梭:斜碰撞使梭子速度下降1%,但制梭铁获得能量,向外甩出,与梭子脱离,对摩擦制梭,吸收梭子动能不利,这一制梭过程的作用是极有限。 (2)制梭铁及梭箱前板对梭子摩擦制梭:制梭铁外甩后重新压紧梭子,梭子移动受到摩擦制动,吸收梭子动能。 (3)皮圈在皮圈架上滑行的摩擦制梭及三轮缓冲装置制梭:一方面,梭子撞击皮结,皮结撞击投梭棒,投梭棒撞击皮圈,使皮圈产生拉伸变形吸收梭子动能;另一方面,投梭棒带动三轮缓冲装置,产生扭转和扭簧变形吸收梭子动能。 制梭过程起主要作用的是第三阶段,梭子的大部分动能为皮结、皮圈和三轮缓冲装置所吸收。 7.常见的无梭引纬的方式有哪几种? 答:片梭、剑杆、喷气、喷水引纬。 10.剑杆引纬的品种适应性及特点如何? 答: ?最高入纬率:1000m/min; ?最大织机幅宽:4600(mm); ?多色纬功能:8-16色; ?积极引纬,对纬纱握持良好,低张力引纬,适合强捻纬纱织造,抑制纬 缩疵点。
?适用纱线:多种纤维的长丝及短纤纱,适用于花式纱,变形纱及弱捻低 强纬纱(运动规律的可设计性)。 ?适用织物:细布,府绸,卡其类,多色纬织物,花式纱,复合纱的厚重 织物,特种工业用,精纺毛织物,毛圈织物,劳动布,割绒,双层,多 层织物。 14.何谓喷气接力引纬?单喷嘴引纬系统与多喷嘴引纬系统的工作原理有何不同? 答: ?接力引纬:在喷气引纬中,除主喷嘴外,在筘座上增设一系列辅助喷嘴,沿纬纱方向相继喷气,纬纱头端气流不断得到补充,这种引纬方式称为接力引纬。 ?单喷嘴与多喷嘴的不同: ?单喷嘴:完全只靠一只喷嘴喷射气流来牵引纬纱,气流和纬纱是在若干 片管道片组成的管道中行进的,从而大大减少了气流扩散。但纬纱飞行 一段时间后,气流头端速度减慢,而尾端喷嘴处仍很快,纬纱经一段距 离后浮动、成圈,纬纱前端速度小于后端速度,造成“前拥后挤”现象。 ?主喷嘴+辅助喷嘴:在筘座上增设了一系列辅助喷嘴,沿纬纱方向相继喷 气,补充高速气流,实现接力引纬,纬纱头端始终收到高速气流的牵引 (避免弯曲)。 16.对比管道片和异性筘多喷嘴引纬系统的应用性能有何不同? 答:管道片引纬系统采用管道片组成管道防止气流扩散,在管道片的径向开有脱纱槽,以便引纬完成后,纬纱从管道片中脱出留在梭口中,管道片之间还要留有间隙以容纳经纱。管道片防气流扩散效果好,节约能源,使用的是常规钢筘,但管道片在经纱中反复作用,对经纱干扰重,限制了纬纱飞行时间,布面质量差;因其筘座动程大,不适应高速织机。由于管道片具有一定厚度,且为有效地防止气流扩散紧密排列,这就难以适应高经密织物的织造。 异形筘是一种带有凹槽的特殊筘齿的钢筘,引纬时筘槽必须位于梭口中央,打纬时织口接触筘槽上部。异形筘防气流扩散效果不如管道片好,耗能较大,使
第二次作业及参考答案
第二次作业及参考答案 1如何设计实验条件使欲了解的电极基本过程(如电化学反应过程)成为电极系统的受控过程? 答:设计实验条件使欲了解的电极基本过程成为电极系统的受控过程,需要了解该电极过程在电极总过程中的具体位置。例如对于简单电极过程,电极过程等效电路为: 要使电化学反应过程(等效电路元件为Rct)成为电化学测量过程中电极过程的受控步骤,即要使得电极过程的等效电路简化为 则应该设计如下实验条件: (1)采用鲁金毛细管、高导电率的支持电解质或断电流法、恒电位仪正反馈法等措施,以减小或补偿掉电解液欧姆电阻,电极的电子导体选用高导电率材料作电子导电物质,以减小或忽略掉电子导体的欧姆电阻; (2)电化学测量时采用小幅值外加激励信号,当外加激励作用于电极一段时间、双电层充(放)电结束但浓差极化还没出现时进行测量,以忽略双电层充放电过程和浓差极化的影响。 (3)当电化学反应物可溶时,可采用旋转圆盘电极、在适宜的高转速下对电极进行测量,以忽略浓差极化对电极过程研究的干扰。 2什么是支持电解质?作用是什么? 答:支持电解质:电导率强、浓度大、在电化学测量过程中承担溶液电迁移任务而不参与电化学反应的物质。可以使溶液的离子强度和电导率在测量过程中保持稳定,获得重现性良好的可靠数据。作用:(1)增强溶液导电性,减小溶液欧姆压降;(2)承担溶液电迁移任务,消除反应物或产物的电迁移传质;(3)支持电解质浓度大,离子迁移数大,溶液离子强度主要取决于支持电解质,可以忽略测量过程中因反应物或产物离子消耗引起的离子强度的变化,电极反应各物种扩散系数可近似视为常数;(4)有利于紧密双电层电容的构建,减小分散层电势(1电势)的影响;(5)加入支持电解质后溶液密度大,可以忽略因电活性物质浓度梯度引起的溶液密度差,从而减小或忽略界面附近的对流传质。 3 工作电极分类? 答:按电极是否作为反应物参与电极反应,工作电极分为两类:第一类工作电极和第二类工作电极。第一类工作电极可称为活性工作电极,电极既承担电子导电的任务,又作为反应物参与电极反应。第二类工作电极又称为惰性工作电极,
北航惯性导航综合实验四实验报告
基于运动规划的惯性导航系统动态实验 GAGGAGAGGAFFFFAFAF
二零一三年六月十日 实验4.1 惯性导航系统运动轨迹规划与设计实验一、实验目的 为进行动态下简化惯性导航算法的实验研究,进行路径和运动状态规划,以验证不同运动状态下惯导系统的性能。通过实验掌握步进电机控制方法,并产生不同运动路径和运动状态。 二、实验内容 学习利用6045B 控制板对步进电机进行控制的方法,并控制电机使运动滑轨产生定长运动和不同加速度下的定长运动。 三、实验系统组成 USB_PCL6045B 控制板(评估板)、运动滑轨和控制计算机组成。 四、实验原理 IMU安装误差系数的计算方法 GAGGAGAGGAFFFFAFAF
USB_PCL6045B 控制板采用了USB 串行总线接口通信方式,不必拆卸计算机箱就可以在台式机或笔记本电脑上进行运动控制芯片PCL6045B 的学习和评估。 USB_PCL6045B 评估板采用USB 串行总线方式实现评估板同计算机的数据交换,由评估板的FIFO 控制回路完成步进电机以及伺服电机的高速脉冲控制,任意 2 轴的圆弧插补,2-4 轴的直线插补等运动控制功能。USB_PCL6045B 评估板上配置了全部PCL6045B 芯片的外部信号接口和增量编码器信号输入接口。由 USB_PCL6045B 评估测试软件可以进行PCL6045B 芯片的主要功能的评估测试。 GAGGAGAGGAFFFFAFAF
图4-1-1USB_PCL6045B 评估板原理框图如图4-1-1 所示,CN11 接口主要用于外部电源连接,可以选择DC5V 单一电源或DC5V/24V 电源。CN12 接口是USB 信号接口,用于USB_PCL6045B 评估板同计算机的数据交换。 USB_PCL6045B 评估板已经完成对PCL6045B 芯片的底层程序开发和硬件资源与端口的驱动,并封装成156 个API 接口函数。用户可直接在VC 环境下利用API 接口函数进行编程。 五、实验内容 GAGGAGAGGAFFFFAFAF