结构力学知识点总结
1.关于∞点和∞线的下列四点结论:
(1) 每个方向有一个∞点(即该方向各平行线的交点)。
(2) 不同方向上有不同的∞点。
(3) 各∞点都在同一直线上,此直线称为∞线。
(4) 各有限远点都不在∞线上。
2.多余约束与非多余约束是相对的,多余约束一般不是唯一指定的。一个体系中有多个约束时,应当分清多余约束和非多余约束,只有非多余约束才对体系的自由度有影响。
3.W>0, 缺少足够约束,体系几何可变。W=0, 具备成为几何不变体系所要求 的最少约束数目。W<0, 体系具有多余约束。
4.一刚片与一结点用两根不共线的链杆相连组成的体系内部几何不变且无多余约束。 两个刚片用一个铰和一根不通过此铰的链杆相联,组成无多余约束的几何不变体系。 两个刚片用三根不全平行也不交于同一点的链杆相联,组成无多余约束的几何不变体系。 三个刚片用不在同一直线上的三个单铰两两相连,组成无多余约束的几何不变体系。
5.二元体规律:
在一个体系上增加或拆除二元体,不改变原体系的几何构造性质。
6.形成瞬铰(虚铰)的两链杆必须连接相同的两刚片。
7.w=s-n ,W=0,但布置不当几何可变。自由度W >0 时,体系一定是可变的。
但W ≤0仅是体系几何不变的必要条件。S=0,体系几何不变。
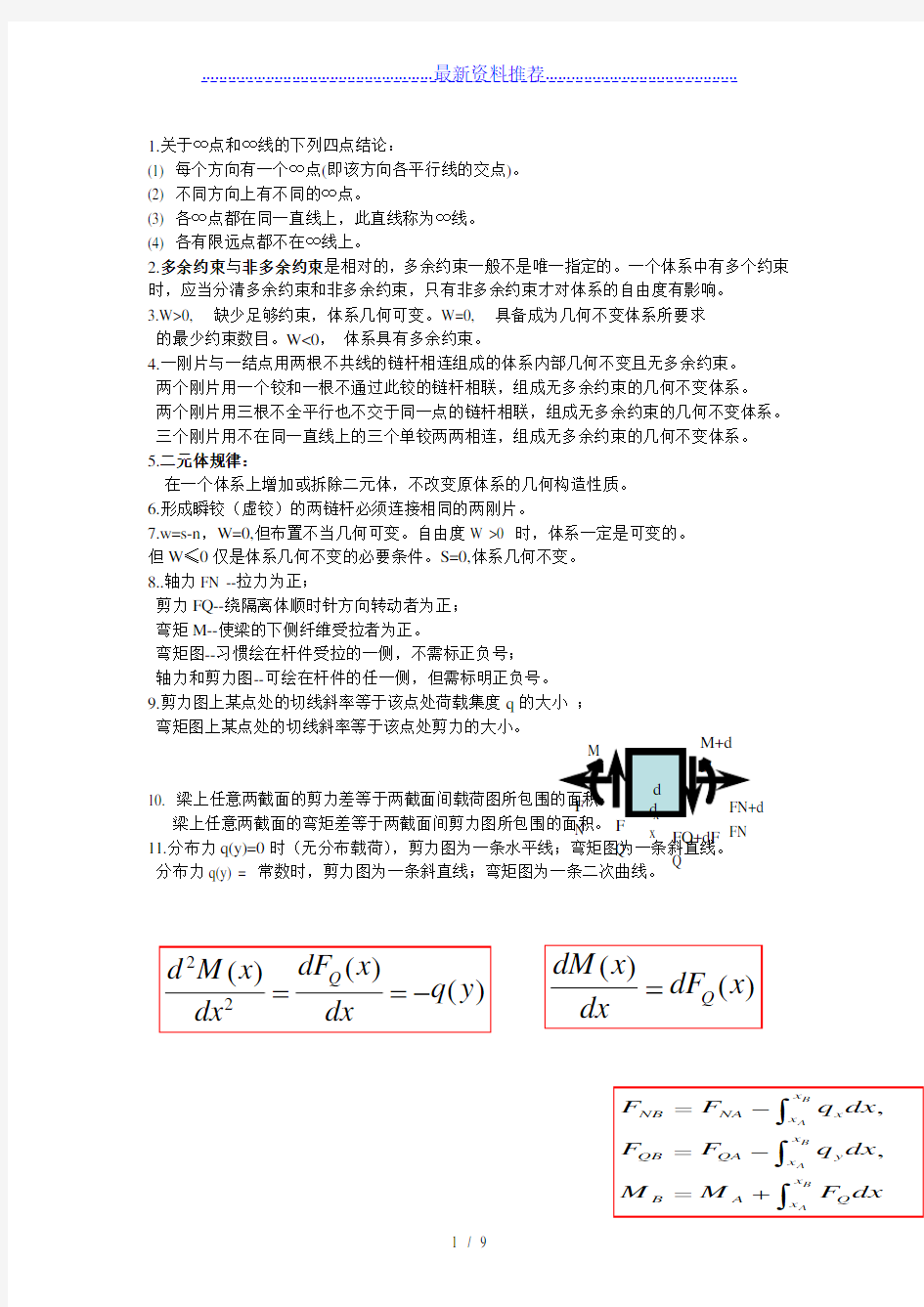
8..轴力FN --拉力为正;
剪力FQ--绕隔离体顺时针方向转动者为正;
弯矩M--使梁的下侧纤维受拉者为正。
弯矩图--习惯绘在杆件受拉的一侧,不需标正负号;
轴力和剪力图--可绘在杆件的任一侧,但需标明正负号。
9.剪力图上某点处的切线斜率等于该点处荷载集度q 的大小 ;
弯矩图上某点处的切线斜率等于该点处剪力的大小。 10.
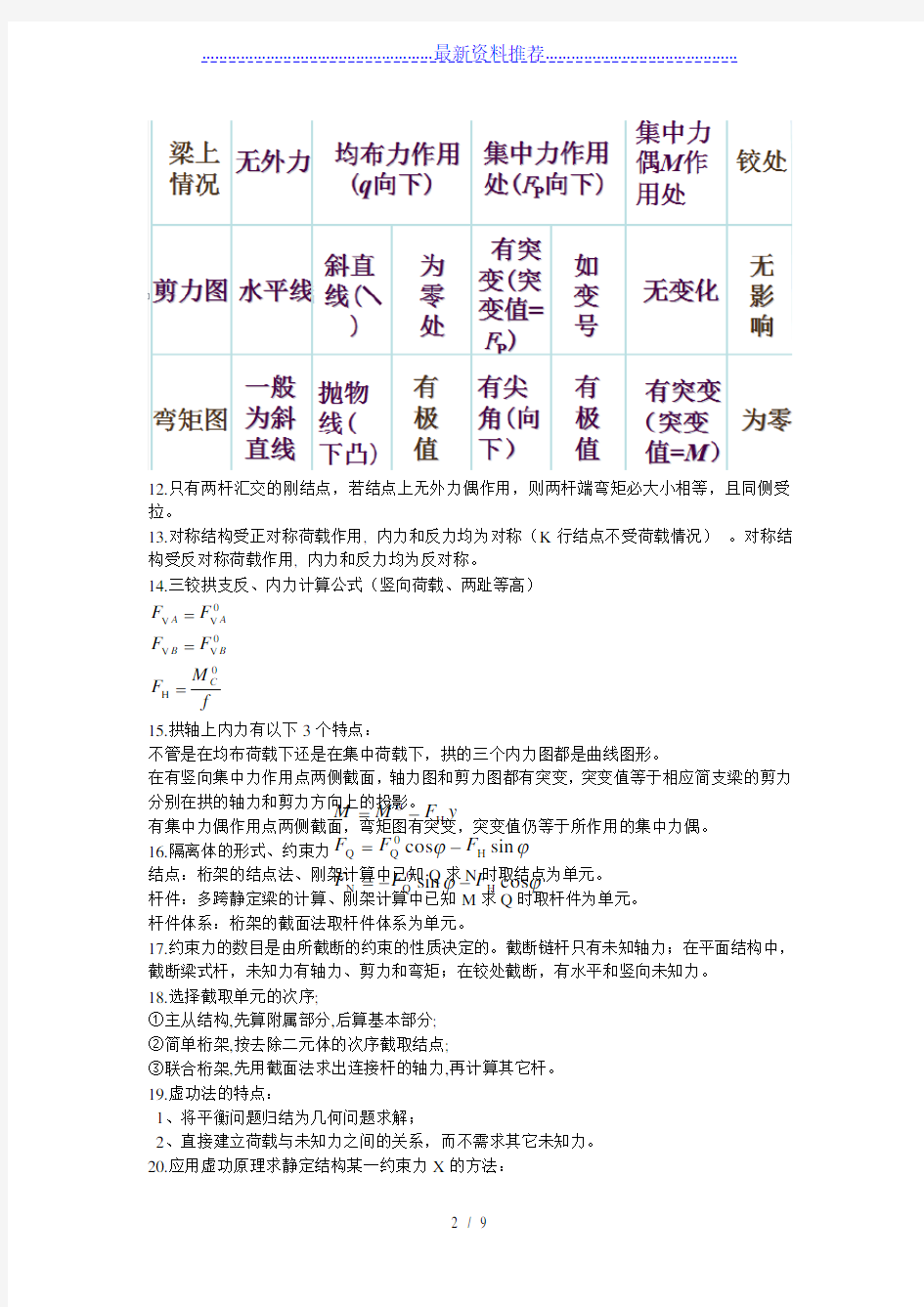
11.分布力q(y)=0时(无分布载荷),剪力图为一条水平线;弯矩图为一条斜直线。 分布力q(y) = 常数时,剪力图为一条斜直线;弯矩图为一条二次曲线。
()()Q dM x dF x dx
=22()()()Q dF x d M x q y dx dx ==-FN N FQ+dF Q Q x ,,B A B A B A
x NB NA x x x QB QA y x x B A Q x F F q dx F F q dx M M F dx =-
=-
=+???
12.只有两杆汇交的刚结点,若结点上无外力偶作用,则两杆端弯矩必大小相等,且同侧受拉。
13.对称结构受正对称荷载作用, 内力和反力均为对称(K 行结点不受荷载情况) 。对称结构受反对称荷载作用, 内力和反力均为反对称。
14.三铰拱支反、内力计算公式(竖向荷载、两趾等高)
f M F F F F F C B
B A
A 0H 0V V 0V V ===
15.拱轴上内力有以下3个特点:
不管是在均布荷载下还是在集中荷载下,拱的三个内力图都是曲线图形。
在有竖向集中力作用点两侧截面,轴力图和剪力图都有突变,突变值等于相应简支梁的剪力分别在拱的轴力和剪力方向上的投影。 有集中力偶作用点两侧截面,弯矩图有突变,突变值仍等于所作用的集中力偶。 16.隔离体的形式、约束力 结点:桁架的结点法、刚架计算中已知Q 求N 时取结点为单元。 杆件:多跨静定梁的计算、刚架计算中已知M 求Q 时取杆件为单元。
杆件体系:桁架的截面法取杆件体系为单元。
17.约束力的数目是由所截断的约束的性质决定的。截断链杆只有未知轴力;在平面结构中,截断梁式杆,未知力有轴力、剪力和弯矩;在铰处截断,有水平和竖向未知力。
18.选择截取单元的次序;
①主从结构,先算附属部分,后算基本部分;
②简单桁架,按去除二元体的次序截取结点;
③联合桁架,先用截面法求出连接杆的轴力,再计算其它杆。
19.虚功法的特点:
1、将平衡问题归结为几何问题求解;
2、直接建立荷载与未知力之间的关系,而不需求其它未知力。
20.应用虚功原理求静定结构某一约束力X 的方法:
???
?cos sin sin cos H 0Q N H 0Q Q H 0F F F F F F y F M M --=-=-=
1)撤除与X 相应的约束。使静定结构变成具有一个自由度的机构,使原来的约束力X 变成主动力。
2)沿X 方向虚设单位虚位移。作出机构可能发生的刚体虚位移图;利用几何关系求出其它3)建立虚功方程,求未知力。 21.临界荷载判别式
22.虚力原理:
虚功原理的关键是位移与力系是独立无关的。因此,可以把位移看成是虚设的,也可以把力系看成是虚设的,本部分正是把力系看作是虚设的,求刚体体系的位移。
步骤:
1.在拟求位移的方向上虚设单位荷载,利用平衡条件求支反力。
2.利用虚力原理列出虚力方程进行求解,由于是在所求位移处设置单位荷载,因此,这种解法又称单位荷载法。
23.虚位移原理:一个力系平衡的充分必要条件是:对任意协调位移,虚功方程成立; 虚力原理:一个位移是协调的充分必要条件是:对任意平衡力系,虚功方程成立。 24.支座位移时静定结构的位移计算 (1)沿所求位移方向加单位力,求出虚反力;
(2)建立虚功方程 (3)解方程得 定出方向。 25.
式中,R 为虚拟状态中由单位荷载引起的与支座位移相应的支座反力,c 为实际状态中与相应的已知的支座位移。为反力虚功总和,当与c 方向一致时,其乘积取正;相反时,取负。须注意,式中S 前面的负号,系原来推导公式时所得,不可漏掉。
26.结构位移计算的一般公式
当截面B 同时产生三种相对位移时,在i -i 方向所产生的位移,即是三者的叠加,有:
27.
这里的积分号表示沿杆件长度积分,总和号表示对结构中各杆求和。其中最后一项表示给定支座位移Ck 的影响。结构位移计算的一般公式还可用变形体的虚功原理导出:外虚功=内虚功。
28.变形体虚功原理:各微段内力在应变上所作的内虚功总和Wi ,等于荷载在位移上以及支座反力在支座位移上所作的外虚功总和We 。
29.荷载作用下的位移计算公式
30.(1)梁与刚架:由于梁和刚架是以弯曲为主要变形 (2)桁架:桁架中杆件只受轴力作用,且每根杆件的截面面积、轴力均为常数
(3)组合结构:桁梁混合结构中,一些杆件以弯曲为主,一些杆件只受轴力
(4)拱:对于拱结构,当压力线与拱轴线相近时,应考虑弯曲变形和轴向变形 0cr i i P R tg α∑?≥在顶点左 0cr i i P R tg α∑?≤在顶点右 0cr i i P R tg α∑?≤在顶点左 0cr i i P R tg α∑?≥在顶点右 01=?∑+??k k c R k k c R ?∑-=?k k ΔR c =-∑
ληθ????d N d Q d M N Q M ++=++=k k c R ds )Q N M (∑-++∑=? γεκ?外虚功: k
k e c R 1W ?∑+?=?内虚功: ()?++∑=ds Q N M W i εκP P P MM NN kQQ ds ds ds EI EA GA ?=∑+∑+∑???
31.剪切变形和轴向变形引起的位移与弯曲变形引起的位移相比可以忽略不计。
32.图乘法应用条件:a )EI=常数;等截面直杆; b ) 两个弯矩图至少有一个是直线。 c )竖标yC 应取自直线图中,对应另一图形的形心处。
面积A 与竖标yC 在杆的同侧,AyC 取正号,否则取负号。
33.当图乘法的适用条件不满足时的处理方法
a)曲杆或EI=EI (x )时,只能用积分法求位移; b)b)当EI 分段为常数或M 、Mp 均非直线时,应分段图乘再叠加。 35.应用图乘法时的几个具体问题 1.如果两个图形都是直线图形,则标距可任取自其中一个图形。 2,如果一个图形为曲线,另一个图形为折线,则应分段考虑。
3.如图形较复杂,可分解为简单图形。
36.静
37.定结构温度变形的特征静定结构当温度发生变化时,各杆件均能自由变形(但不产生内力),同样可采用单位荷载法。
温度沿杆长度均匀分布,杆件不可能出现剪切变形(即微段d η=0)
,同时注意到实际状态
的支座位移为零。 38.温度引起位移公式
dq 和du 为实际温度状态下,因材料热胀冷缩所引起的各微段的弯曲变形和轴向变形。只要能求出dq 和du 的表达式,即可利用上式求得结构的位移。
39.温度引起的变形代入公式 上下边缘温差
38.类似。设各杆长度的误差为Dl (伸长为正,缩短为负),则位移计算公式为
40.超静定结构特征:
超静定结构则是有多余约束的几何不变体系;
超静定结构的支座反力和截面内力不能完全由静力平衡条件唯一地加以确定 。
41.确定结构超静定次数最直接的方法是解除多余约束法,即将原结构的多余约束移去,使其成为一个(或几个)静定结构,则所解除的多余约束数目就是原结构的超静定次数。 42.1)移去一根支杆或切断一根链杆,相当于解除一个约束。
2)移去一个不动铰支座或切开一个单铰,相当于解除两个约束。
3)移去一个固定支座或切断一根梁式杆,相当于解除三个约束。
4)将固定支座改为不动铰支座或将梁式杆中某截面改为铰结,相当于解除一个转动约束。
43.力法的计算步骤
1)确定基本未知量数目。力法基本未知量数=结构的多余约束数=结构的超静定次数
2)选择力法基本体系。(去多余约束)
3)建立力法基本方程。
4)求系数和自由项。(图乘法,互乘,自乘) d d d d ΔM N u Qd M N u θη
θ=++=+∑∑∑???∑∑??00()d d d d d Ky t M N u Qd t s N t s M h M s t N s t h θηαααα?=++?=+=+?∑∑∑???∑∑??∑∑??N M t A α?+0()Ky t N M t t A A h αα??=+∑∑12t t t -=?2210t t t +=