实验力学实验报告
实验力学实验报告
姓名:耿臻岑
学号:130875
指导老师:郭应征
实验一薄壁圆管弯扭组合应力测定实验
一、实验目的
1、用应变花测定薄壁圆管在弯扭条件下一点处的主应力和主方向
2、测定薄壁圆管在弯扭组合条件下的弯矩、扭矩和剪力等内力
3、进一步熟悉和掌握不同的桥路接线方法
4、初步了解在组合变形情况下测量某一内力对应应变的方法
二、实验设备
1、电阻应变仪YJ-28
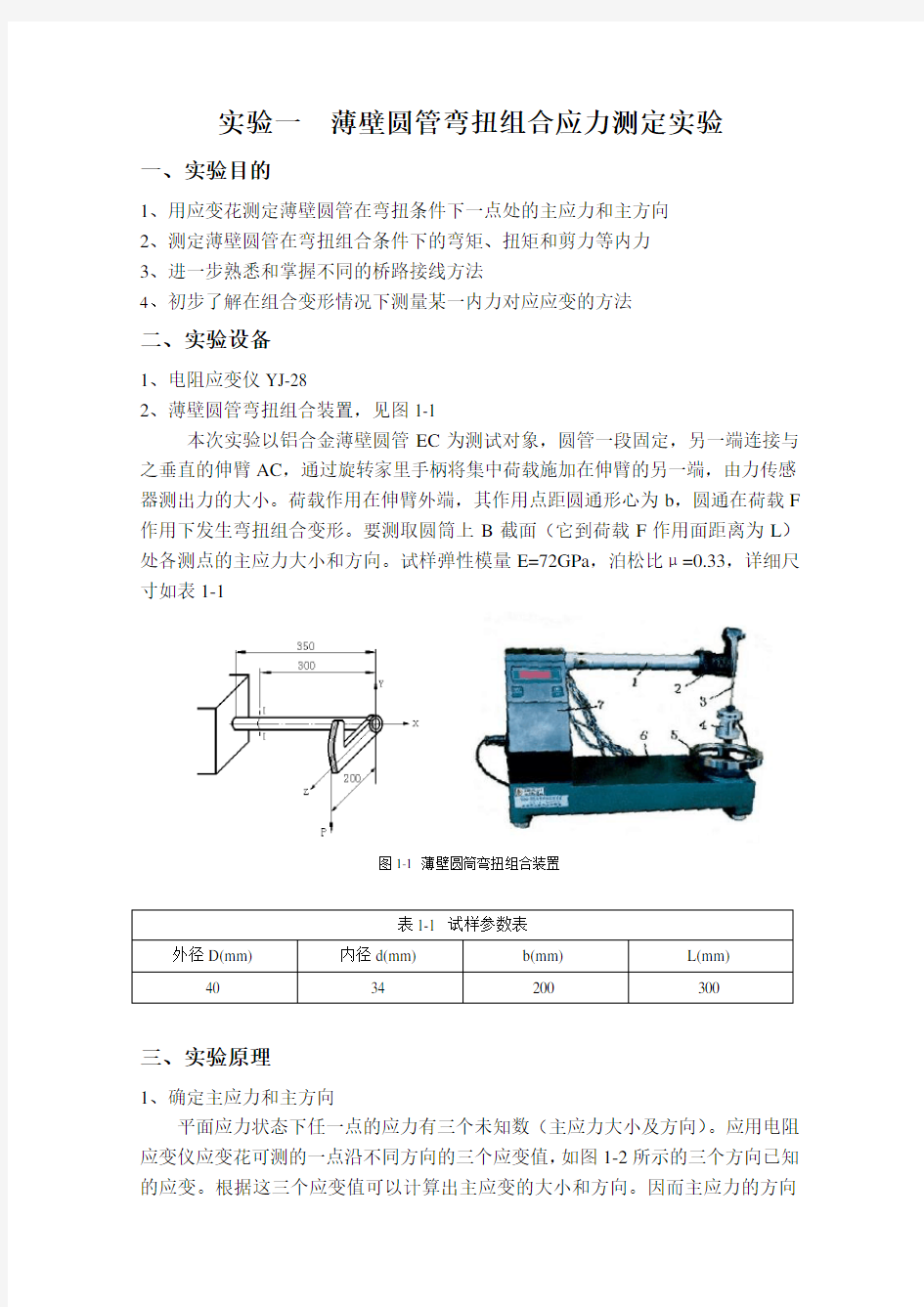
2、薄壁圆管弯扭组合装置,见图1-1
本次实验以铝合金薄壁圆管EC为测试对象,圆管一段固定,另一端连接与之垂直的伸臂AC,通过旋转家里手柄将集中荷载施加在伸臂的另一端,由力传感器测出力的大小。荷载作用在伸臂外端,其作用点距圆通形心为b,圆通在荷载F 作用下发生弯扭组合变形。要测取圆筒上B截面(它到荷载F作用面距离为L)处各测点的主应力大小和方向。试样弹性模量E=72GPa,泊松比μ=0.33,详细尺寸如表1-1
图1-1 薄壁圆筒弯扭组合装置
表1-1 试样参数表
外径D(mm) 内径d(mm) b(mm) L(mm)
40 34 200 300
三、实验原理
1、确定主应力和主方向
平面应力状态下任一点的应力有三个未知数(主应力大小及方向)。应用电阻应变仪应变花可测的一点沿不同方向的三个应变值,如图1-2所示的三个方向已知的应变。根据这三个应变值可以计算出主应变的大小和方向。因而主应力的方向
也可确定(与主应变方向重合)
()(
)
()()
4545045452
2
4545
1,2450450
4545
0045451122
2212
22
2
tan 2211x y xy E
E
εεεεεεγεεεεεεεεεεεαεεεσεμεμσεμεμ------==+-=-+=
±-+--=
--=
+-=+-
图1-2 应变花示意图 图1-3 B 、D 点贴片位置示意图
2、测定弯矩
在靠近固定端的下表面D 上,粘一个与点B 相同的应变花,如图1-3所示。将B 点的应变片和D 点的应变片,采用双臂测量接线法(自补偿半桥接线法),得:
()()()00004422
64r T T r
r
E E E D d M D
εεεεεεεσεπε=+--+===
-=
图1-4 测点A 贴片位置示意图
3、测定扭矩
当圆管受扭转时,A 点的应变片和C 点的应变片中45°和-45°都沿主应力方向,示意图如图1-4,但两点的主应力大小却不相同,由于圆管是薄壁结构,不能忽略由剪力产生的弯曲切应力。A 点的应变片扭转切应力与弯曲切应力的方向相
同,故切应力相加;C 点的应变片扭转切应力与弯曲切应力的方向相反,故切应力相减。由应力-应变关系(按四臂测量接线法)可以得到:
()
()()
4
4
414116T E
D d
E T D
τε
μπε
μ=
+-=
+
4、测定剪力
原理与测扭矩相同,也采用A 、C 点的应变片,由应力-应变关系得到:
()()0412412
Q r E
R t E Q τε
μπεμ=
+?=
+
四、实验数据
1、A 点的主应力测量
2、C 点的主应力测量
3、测定弯矩、扭矩和剪力
五、实验数据处理
1、A 点主应力计算
)()
)()
224545
145045022454524504504545004545276.8872.25
76.88222276.8872.2572.25
222
7tan 22εεεεεεεεεεεεεεαεεε--
--+-=
+
-+
-=≈+-=--+-=
---==-
-()()()()096
1122296
22122
2.2576.88
91.5
2 1.576.8872.25
44.97
72101076.880.3372.25 4.29110.3372101072.250.3376.88 3.79110.33E Mpa E Mpa ασεμεμσεμεμ---≈?-+≈??=+=
?-?≈--??=+=
?-+?≈---2、C 点主应力计算
)()
)()
224545
145045022454524504504545004545241.644.8
44.83222241.644.8
41.63
222
41.644.8
tan 222044εεεεεεεεεεεεεεαεεε----+-+=
+
-+-=+-+=--+-=≈----==--?-()()()()096
1122296
22122
27
.841.6
43.94
72101044.830.3341.63 2.51110.3372101041.630.3344.83 2.17110.33E Mpa E Mpa ασεμεμσεμεμ--≈+≈??=+=
?-?≈--??=+=
?-+?≈---3、弯矩、扭矩和剪力计算
()()()()()()()
449126
3
444412
963
96
07210 3.1410265.51028.6964644010 3.144034107210235.751019.164116410.331640102721062.510 3.14310412410.33r
r r E D d M N m
D D d
E T N m D R t E Q πεπεμπεμ--------??????==≈??-?-?????==?≈+?+??????==???+?+3318.510147.4N
--??≈ 六、误差分析
1、理论解
()43
394
631000.3301000.220100 3.1440103411310323240M FL N m T Fb N m Q F N
D W m πα--==?===?===??????=-=?-≈??? ???????
()43
394
6366
333.144010341161016164030
1031020 3.3361022100
0.5742 3.1431018.510n M n n Q D W m M Mpa W T Mpa
W Q Mpa A πασττ------??????=-=?-≈??? ???????
=
==?==≈??=
=≈?????
A 点:
13 3.330.574 3.9043.904n Q Mpa Mpa
τττσστ=+=+==-==
C 点:
13 3.330.574 2.7562.756n Q Mpa Mpa
τττσστ=-=-==-==
B 点:
131011210 1.012Mpa
Mpa σσ=+≈=
≈-
D 点:
1310 1.01210112Mpa
Mpa σσ=-≈=-
≈-
2、实验值与理论值比较
经计算发现,主应力、弯矩和扭矩的测量结果与理论值相近,误差较小。而
剪力的误差较大,误差可能由以下几个方面的原因引起:
(1)加载不均匀,造成读书误差
(2)实验前电桥不平衡,仪器长时间使用,使电桥电压稳定性下降,影响精度(3)贴片角度偏差和位置偏差
(4)系统误差,如应变片灵敏系数误差等。
串级控制系统研究 仿真
本科学生毕业论文 2011年5月20日 论文题目: 串级控制系统研究学院: 电子工程学院年级: 2007级专业: 自动化姓名: 陈曦学号: 20075199指导教师: 赵建华
摘要 随着现代工业生产过程向着大型、连续和强化方向发展,对控制系统的控制品质提出了日益增长的要求。在这种情况下,简单的单回路控制已经难以满足一些复杂的控制要求。串级控制系统是过程控制中的一种多回路控制系统,是为了提高单回路控制系统的控制效果而提出来的一种控制方案。串级控制系统把两个单回路控制系统以一定的结构形式串联在一起,它不仅具有单回路控制系统的全部功能,而且还具有许多单回路控制系统所没有的优点。串级控制系统采用了两个调节器,因此它的调节器的参数整定更复杂一些。 本论文论述了一个液位——流量串级控制系统的设计方法和步骤,介绍了它的参数整定方法。在此过程中,介绍了对液位和流量进行检测和转换的常用元件,应用阶跃响应曲线推导了广义对象的传递函数,简单地论述了串级控制系统的优点,讨论了它对控制效果的改善作用,并使用仿真软件对该系统进行了仿真。 关键词 串级控制系统;液位;流量;仿真
Abstract Along with the modern industry production process to large-scale,continuously is developing with the strengthened direction,proposed to the control system control quality day by day grows request.In this kind of situation,the simple single return route control already with difficulty satisfied some complex control requests.The cascade control system is in the process control more than one kind of return routes control system,is for enhance one kind of control plan which the single return route control system the control effect proposes.The cascade control system two single return routes control system by the certain structural style connects in together,it not only has the single return route control system the complete function,moreover also has many single return routes control system no merit.The cascade control system has used two regulators,therefore it is more complex to set its regulator parameter. The present paper elaborated a fluid position—current capacity cascade control system design method and the step,introduced its parameter set method.In this process,introduced carries on the examination and the transformation commonly used part to the fluid position and the current capacity,has inferred the generalized object transfer function using the step leap response curve,simply elaborated the cascade control system merit,discussed it to control the effect the improvement function,and use simulation software has carried on the simulation to this system. Key words Cascade control system;fluid position;current capacity;simulation
控制系统仿真与设计实验报告
控制系统仿真与设计实验报告 姓名: 班级: 学号: 指导老师:刘峰 7.2.2控制系统的阶跃响应 一、实验目的 1.观察学习控制系统的单位阶跃响应; 2.记录单位阶跃响应曲线; 3.掌握时间相应的一般方法; 二、实验内容 1.二阶系统G(s)=10/(s2+2s+10)
键入程序,观察并记录阶跃响应曲线;录系统的闭环根、阻尼比、无阻尼振荡频率;记录实际测去的峰值大小、峰值时间、过渡时间,并与理论值比较。 (1)实验程序如下: num=[10]; den=[1 2 10]; step(num,den); 响应曲线如下图所示: (2)再键入: damp(den); step(num,den); [y x t]=step(num,den); [y,t’] 可得实验结果如下:
记录实际测取的峰值大小、峰值时间、过渡时间,并与理论计算值值比较 实际值理论值 峰值 1.3473 1.2975
峰值时间 1.0928 1.0649 过渡时间+%5 2.4836 2.6352 +%2 3.4771 3.5136 2. 二阶系统G(s)=10/(s2+2s+10) 试验程序如下: num0=[10]; den0=[1 2 10]; step(num0,den0); hold on; num1=[10]; den1=[1 6.32 10]; step(num1,den1); hold on; num2=[10]; den2=[1 12.64 10]; step(num2,den2); 响应曲线:
(2)修改参数,分别实现w n1= (1/2)w n0和w n1= 2w n0响应曲线试验程序: num0=[10]; den0=[1 2 10]; step(num0,den0); hold on; num1=[2.5]; den1=[1 1 2.5]; step(num1,den1); hold on; num2=[40]; den2=[1 4 40]; step(num2,den2); 响应曲线如下图所示:
过程控制系统课程设计报告报告实验报告
成都理工大学工程技术学院《过程控制系统课程设计实验报告》 名称:单容水箱液位过程控制 班级:2011级自动化过程控制方向 姓名: 学号:
目录 前言 一.过程控制概述 (2) 二.THJ-2型高级过程控制实验装置 (3) 三.系统组成与工作原理 (5) (一)外部组成 (5) (二)输入模块ICP-7033和ICP-7024模块 (5) (三)其它模块和功能 (8) 四.调试过程 (9) (一)P调节 (9) (二)PI调节 (10) (三)PID调节 (11) 五.心得体会 (13)
前言 现代高等教育对高校大学生的实际动手能力、创新能力以及专业技能等方面提出了很高的要求,工程实训中心的建设应紧紧围绕这一思想进行。 首先工程实训首先应面向学生主体群,建设一个有较宽适应面的基础训练基地。通过对基础训练设施的 集中投入,面向全校相关专业,形成一定的规模优势,建立科学规范的训练和管理方法,使训练对象获得机械、 电子基本生产过程和生产工艺的认识,并具备一定的实践动手能力。 其次,工程实训的内容应一定程度地体现技术发展的时代特征。为了适应现代化工业技术综合性和多学科交叉的特点,工程实训的内容应充分体现机与电结合、技术与非技术因素结合,贯穿计算机技术应用,以适应科学技术高速发展的要求。应以一定的专项投入,建设多层次的综合训练基地,使不同的训练对象在获得对现代工业生产方式认识的同时,熟悉综合技术内容,初步建立起“大工程”的意识,受到工业工程和环境保护方面的训练,并具备一定的实用技能。 第三,以创新训练计划为主线,依靠必要的软硬件环境,建设创新教育基地。以产品的设计、制造、控制乃至管理为载体,把对学生的创新意识和创新能力的培养,贯穿于问题的观测和判断、创造和评价、建模和设计、仿真和建造的整个过程中。
实验四 串级控制系统
实验四 加热炉温度串级控制系统 (实验地点:程控实验室,崇实楼407) 一、实验目的 1、熟悉串级控制系统的结构与特点。 2、掌握串级控制系统临界比例度参数整定方法。 3、研究一次、二次阶跃扰动对系统被控量的影响。 二、实验设备 1、MATLAB 软件, 2、PC 机 三、实验原理 工业加热炉温度串级控制系统如图4-1所示,以加热炉出口温度为主控参数,以炉膛温度为副参数构成串级控制系统。 图4-1 加热炉温度串级控制系统工艺流程图 图4-1中,主、副对象,即加热炉出口温度和炉膛温度特性传递函数分别为 主对象:;)130)(130()(18001++=-s s e s G s 副对象:2 1802)1)(110()(++=-s s e s G s 主控制器的传递函数为PI 或PID ,副控制器的传递函数为P 。对PI 控制器有 221111)(),/(, 1 11)(c c I c I I c I c c K s G T K K s K K s T K s G ==+=???? ? ?+= 采用串级控制设计主、副PID 控制器参数,并给出整定后系统的阶跃响应曲线和阶跃扰动响应曲线,说明不同控制方案控制效果的区别。 四、实验过程 串级控制系统的设计需要反复调整调节器参数进行实验,利用MATLAB 中的Simulink 进行仿真,可以方便、快捷地确定出调节器的参数。 1.建立加热炉温度串级控制系统的Simulink 模型 (图4-2) 在MATLAB 环境中建立Simulink 模型如下:)(01s G 为主被控对象,)(02s G 为副被控对象,Step 为系统的输入,c 为系统的输出,q1为一次阶跃扰动,q2为二次阶跃扰动,可以用示波器观察输出波形。PID1为主控制器,双击PID 控制器可设置参数:(PID 模块在
实验报告格式
重庆工商大学 《统计学》实验报告 实验课程:统计学 _ 指导教师:陈正伟 _ 专业班级: 08 经济学 学生姓名:程剑波 学生学号: 2008011133 __
实验项目 实验日期实验地点80608 实验目的掌握统计学的基本计算方法和分析方法。 实验内容一、统计图绘制;二、动差、偏度系数、峰度系数的计算;三、趋势性的绘制; 四、相关分析与回归分析;五、时间数列的动态指标分析;六、循环变动的测 算分析。 通过统计学(2009.9.10-2009.12.15)实验报告如下: 一、统计图绘制; (一)过程: (二)结果: (三)分析: 二、动差、偏度系数、峰度系数的计算; (一)过程: (二)结果: (三)分析: 三、趋势性的绘制; (一)过程: (二)结果: (三)分析: 四、相关分析与回归分析; (一)过程: (二)结果: (三)分析:
五、时间数列的动态指标分析 (一)过程: (二)结果: (三)分析: 六、循环变动的测算分析。 (一)过程: (二)结果: (三)分析: 体会: 参考实验报告: 重庆工商大学数学与统计学院 综合评价方法及应用 实验报告
实验课程:非参数统计 _ 指导教师:陈正伟 _ 专业班级: 06市调2班 学生姓名:何春 学生学号: 2006004151 _
实验报告一 实验项目变异系数法相关系数法熵值发坎蒂雷法 实验日期2009-4-30 实验地点80608 实验目的 通过本实验本要求掌握综合评价指标体系中各个指标重要性权数的重要意义;掌握权数确定的定性和定量技术和技能;解决实际综合评价中重要性权数确定的处理技能。 实验内容 根据资料使用变异系数法、相关系数法、熵值法和坎蒂雷方法分别确定各个指标的权数。并进行权数比较分析。 检验方法的选择及实验步骤及结果: 1用变异系数求各个指标的权数: 基本步骤:(1)先求各个指标的均值Xi 和标准差 Si (2)接着求各个指标的变异系数Vi=Si/Xi (3)对Vi作作归一化处理,及得各个指标的权数 结果如下: 从这个表中可以看到最后一列的权数最大,即人均创造总收入这个指标在这项评价上的分辨信息丰富,这个指标的数值能明确区分开各个评价被评价对象差异。同理,第四列的权数最小,也就是说各个被评价对象在某项指标上的数值差异较小,那么这项指标区分开各评价对象的能力较弱。 2 用相关系数法求各个指标的权数: 基本步骤:(1)计算各个指标之间的相关系数矩阵 (2)构造分块矩阵 R1(去掉相关系数矩阵的第一行和第一列)R2 R3 R4 R5 R6 同理可得
哈工大_控制系统实践_磁悬浮实验报告
研究生自动控制专业实验 地点:A区主楼518房间 姓名:实验日期:年月日斑号:学号:机组编号: 同组人:成绩:教师签字:磁悬浮小球系统 实验报告 主编:钱玉恒,杨亚非 哈工大航天学院控制科学实验室
磁悬浮小球控制系统实验报告 一、实验内容 1、熟悉磁悬浮球控制系统的结构和原理; 2、了解磁悬浮物理模型建模与控制器设计; 3、掌握根轨迹控制实验设计与仿真; 4、掌握频率响应控制实验与仿真; 5、掌握PID控制器设计实验与仿真; 6、实验PID控制器的实物系统调试; 二、实验设备 1、磁悬浮球控制系统一套 磁悬浮球控制系统包括磁悬浮小球控制器、磁悬浮小球实验装置等组成。在控制器的前部设有操作面板,操作面板上有起动/停止开关,控制器的后部有电源开关。 磁悬浮球控制系统计算机部分 磁悬浮球控制系统计算机部分主要有计算机、1711控制卡等; 三、实验步骤 1、系统实验的线路连接 磁悬浮小球控制器与计算机、磁悬浮小球实验装置全部采用标准线连接,电源部分有标准电源线,考虑实验设备的使用便利,在试验前,实验装置的线路已经连接完毕。 2、启动实验装置 通电之前,请详细检察电源等连线是否正确,确认无误后,可接通控制器电源,随后起动计算机和控制器,在编程和仿真情况下,不要启动控制器。 系统实验的参数调试
根据仿真的数据及控制规则进行参数调试(根轨迹、频率、PID 等),直到获得较理想参数为止。 四、实验要求 1、学生上机前要求 学生在实际上机调试之前,必须用自己的计算机,对系统的仿真全部做完,并且经过老师的检查许可后,才能申请上机调试。 学生必须交实验报告后才能上机调试。 2、学生上机要求 上机的同学要按照要求进行实验,不得有违反操作规程的现象,严格遵守实验室的有关规定。 五、系统建模思考题 1、系统模型线性化处理是否合理,写出推理过程? 合理,推理过程: 由级数理论,将非线性函数展开为泰勒级数。由此证明,在平衡点)x ,(i 00对 系统进行线性化处理是可行的。 对式2x i K x i F )(),(=作泰勒级数展开,省略高阶项可得: )x -)(x x ,(i F )i -)(i x ,(i F )x ,F(i x)F(i,000x 000i 00++= )x -(x K )i -(i K )x ,F(i x)F(i,0x 0i 00++= 平衡点小球电磁力和重力平衡,有 (,)+=F i x mg 0 |,δδ===00 i 00 i i x x F(i,x) F(i ,x )i ;|,δδ===00x 00i i x x F(i,x)F (i ,x )x 对2 i F(i,x )K()x =求偏导数得:
过程控制系统仿真实验指导
过程控制系统Matlab/Simulink 仿真实验 实验一 过程控制系统建模 ............................................................................................................. 1 实验二 PID 控制 ............................................................................................................................. 2 实验三 串级控制 ............................................................................................................................. 6 实验四 比值控制 ........................................................................................................................... 13 实验五 解耦控制系统 . (19) 实验一 过程控制系统建模 指导内容:(略) 作业题目一: 常见的工业过程动态特性的类型有哪几种?通常的模型都有哪些?在Simulink 中建立相应模型,并求单位阶跃响应曲线。 作业题目二: 某二阶系统的模型为2 () 22 2n G s s s n n ?ζ??= ++,二阶系统的性能主要取决于ζ,n ?两个参数。试利用Simulink 仿真两个参数的变化对二阶系统输出响应的影响,加深对二阶 系统的理解,分别进行下列仿真: (1)2n ?=不变时,ζ分别为0.1, 0.8, 1.0, 2.0时的单位阶跃响应曲线; (2)0.8ζ=不变时,n ?分别为2, 5, 8, 10时的单位阶跃响应曲线。
过程控制系统实验报告
实验一过程控制系统的组成认识实验 过程控制及检测装置硬件结构组成认识,控制方案的组成及控制系统连接 一、过程控制实验装置简介 过程控制是指自动控制系统中被控量为温度、压力、流量、液位等变量在工业生产过程中的自动化控制。本系统设计本着培养工程化、参数化、现代化、开放性、综合性人才为出发点。实验对象采用当今工业现场常用的对象,如水箱、锅炉等。仪表采用具有人工智能算法及通讯接口的智能调节仪,上位机监控软件采用MCGS工控组态软件。对象系统还留有扩展连接口,扩展信号接口便于控制系统二次开发,如PLC控制、DCS控制开发等。学生通过对该系统的了解和使用,进入企业后能很快地适应环境并进入角色。同时该系统也为教师和研究生提供一个高水平的学习和研究开发的平台。 二、过程控制实验装置组成 本实验装置由过程控制实验对象、智能仪表控制台及上位机PC三部分组成。 1、被控对象 由上、下二个有机玻璃水箱和不锈钢储水箱串接,4.5千瓦电加热锅炉(由不锈钢锅炉内胆加温筒和封闭外循环不锈钢锅炉夹套构成),压力容器组成。 水箱:包括上、下水箱和储水箱。上、下水箱采用透明长方体有机玻璃,坚实耐用,透明度高,有利于学生直接观察液位的变化和记录结果。水箱结构新颖,内有三个槽,分别是缓冲槽、工作槽、出水槽,还设有溢流口。二个水箱可以组成一阶、二阶单回路液位控制实验和双闭环液位定值控制等实验。 模拟锅炉:锅炉采用不锈钢精致而成,由两层组成:加热层(内胆)和冷却层(夹套)。做温度定值实验时,可用冷却循环水帮助散热。加热层和冷却层都有温度传感器检测其温度,可做温度串级控制、前馈-反馈控制、比值控制、解耦控制等实验。 压力容器:采用不锈钢做成,一大一小两个连通的容器,可以组成一阶、二阶单回路压力控制实验和双闭环串级定值控制等实验。 管道:整个系统管道采用不锈钢管连接而成,彻底避免了管道生锈的可能性。为了提高实验装置的使用年限,储水箱换水可用箱底的出水阀进行。 2、检测装置 (液位)差压变送器:检测上、下二个水箱的液位。其型号:FB0803BAEIR,测量范围:0~1.6KPa,精度:0.5。输出信号:4~20mA DC。 涡轮流量传感器:测量电动调节阀支路的水流量。其型号:LWGY-6A,公称压力:6.3MPa,精度:1.0%,输出信号:4~20mA DC 温度传感器:本装置采用了两个铜电阻温度传感器,分别测量锅炉内胆、锅炉夹套的温度。经过温度传感器,可将温度信号转换为4~20mA DC电流信号。 (气体)扩散硅压力变送器:用来检测压力容器内气体的压力大小。其型号:DBYG-4000A/ST2X1,测量范围:0.6~3.5Mpa连续可调,精度:0.2,输出信号为4~20mA DC。 3、执行机构 电气转换器:型号为QZD-1000,输入信号为4~20mA DC,输出信号:20~100Ka气压信号,输出用来驱动气动调节阀。 气动薄膜小流量调节阀:用来控制压力回路流量的调节。型号为ZMAP-100,输入信号为4~20mA DC或0~5V DC,反馈信号为4~20mA DC。气源信号 压力:20~100Kpa,流通能力:0.0032。阀门控制精度:0.1%~0.3%,环境温度:-4~+200℃。 SCR移相调压模块:采用可控硅移相触发装置,输入控制信号0~5V DC或4~20mA DC 或10K电位器,输出电压变化范围:0~220V AC,用来控制电加热管加热。 水泵:型号为UPA90,流量为30升/分,扬程为8米,功率为180W。
串级控制系统整定实验报告
学院 过程控制系统实验报告书 实验名称串级控制系统整定 专业自动化专业 班级 指导教师 姓名 学号 实验日期
串级控制系统整定 一、实验目的 (1)掌握动态模型的创建方法.。 (2)掌握串级控制系统整定方法。 (3)了解控制系统的特点。 (4)了解串联控制系统的特点。 二、实验器材 计算机一台,MATLAB软件 三、实验原理 .串级控制系统:就是由两个调节器串联在一起,控制一个执 行阀,实现定值控制的控制系统。 .串级控制系统的通用方框图: .串级控制系统特点:(1)改善了被控过程的动态特性。 (2)提高了系统的工作频率。 (3)具有较强的抗扰动能力。 (4)具有一定的自适应能力。 .两步整定法
(1)工况稳定时,闭合主回路,主、副调节器都在纯比例作用的条件下,主调节器的比例度置于100%,用单回路控制系统的衰减曲线法整定,求取副调节器的比例度s δ和操作周期s T 。 (2)将副调节器的比例度置于所求得的数值上,把副回路作为主回路中的一个环节,用同样方法整定主回路,求取主调节器的比例度和操作周期。 四、实验步骤 (1)启动计算机,运行MATLAB 应用程序。 (2)在MATLAB 命令窗口输入Smulink,启动Simulink 。 (3)在Simulink 库浏览窗口中,单击工具栏中的新建窗口快捷按钮或在Simulink 库窗口中选择菜单命令File New Modeel,打开一个标题为“Untitled ”的空白模型编辑窗口。 (4)设被控对象的传递函数为: 24 21 (110)(120)s s ?++,要求被调量始 终维持在设定值。设计一个串级控制系统,并且要求控制系统的衰减率为75%,静态误差为零。用MATLAB 创建仿真模型。 (5)按两步整定法整定调节器参数。 (6)按步骤(5)的结果设置调节器参数,启动仿真,通过示波器模块观测并记录系统输出的变化曲线。 (7)施加内扰,观测系统运行情况。 . 衰减曲线法整定参数计算表:
实验报告范本
学生实验报告书 实验课程名称 开课学院 指导教师姓名 学生姓名 学生专业班级 200-- 200学年第学期
实验教学管理基本规范 实验是培养学生动手能力、分析解决问题能力的重要环节;实验报告是反映实验教学水平与质量的重要依据。为加强实验过程管理,改革实验成绩考核方法,改善实验教学效果,提高学生质量,特制定实验教学管理基本规范。 1、本规范适用于理工科类专业实验课程,文、经、管、计算机类实验课程可根据具体情况参 照执行或暂不执行。 2、每门实验课程一般会包括许多实验项目,除非常简单的验证演示性实验项目可以不写实验 报告外,其他实验项目均应按本格式完成实验报告。 3、实验报告应由实验预习、实验过程、结果分析三大部分组成。每部分均在实验成绩中占一 定比例。各部分成绩的观测点、考核目标、所占比例可参考附表执行。各专业也可以根据具体情况,调整考核内容和评分标准。 4、学生必须在完成实验预习内容的前提下进行实验。教师要在实验过程中抽查学生预习情况, 在学生离开实验室前,检查学生实验操作和记录情况,并在实验报告第二部分教师签字栏签名,以确保实验记录的真实性。 5、教师应及时评阅学生的实验报告并给出各实验项目成绩,完整保存实验报告。在完成所有 实验项目后,教师应按学生姓名将批改好的各实验项目实验报告装订成册,构成该实验课程总报告,按班级交课程承担单位(实验中心或实验室)保管存档。 6、实验课程成绩按其类型采取百分制或优、良、中、及格和不及格五级评定。
实验课程名称:__通信原理_____________ 图1 AMI/HDB3码型变换电路原理图 含有丰富的时钟分量,因此输出数据直接送到位同步提取锁相环(PLL) 编译码系统组成电原理图见图1。
自动控制系统实验报告
自动控制系统实验报告 学号: 班级: 姓名: 老师:
一.运动控制系统实验 实验一.硬件电路的熟悉和控制原理复习巩固 实验目的:综合了解运动控制实验仪器机械结构、各部分硬件电路以及控制原理,复习巩固以前课堂知识,为下阶段实习打好基础。 实验内容:了解运动控制实验仪的几个基本电路: 单片机控制电路(键盘显示电路最小应用系统、步进电机控制电路、光槽位置检测电路) ISA运动接口卡原理(搞清楚译码电路原理和ISA总线原理) 步进电机驱动检测电路原理(高低压恒流斩波驱动电路原理、光槽位置检测电路)两轴运动十字工作台结构 步进电机驱动技术(掌握步进电机三相六拍、三相三拍驱动方法。) 微机接口技术、单片机原理及接口技术,数控轮廓插补原理,计算机高级语言硬件编程等知识。 实验结果: 步进电机驱动技术: 控制信号接口: (1)PUL:单脉冲控制方式时为脉冲控制信号,每当脉冲由低变高是电机走一步;双 脉冲控制方式时为正转脉冲信号。 (2)DIR:单脉冲控制方式时为方向控制信号,用于改变电机转向;双脉冲控制方式 时为反转脉冲信号。
(3)OPTO :为PUL 、DIR 、ENA 的共阳极端口。 (4)ENA :使能/禁止信号,高电平使能,低电平时驱动器不能工作,电机处于自由状 态。 电流设定: (1)工作电流设定: (2)静止电流设定: 静态电流可用SW4 拨码开关设定,off 表示静态电流设为动态电流的一半,on 表示静态电流与动态电流相同。一般用途中应将SW4 设成off ,使得电机和驱动器的发热减少,可靠性提高。脉冲串停止后约0.4 秒左右电流自动减至一半左右(实际值的60%),发热量理论上减至36%。 (3)细分设定: (4)步进电机的转速与脉冲频率的关系 电机转速v = 脉冲频率P * 电机固有步进角e / (360 * 细分数m) 逐点比较法的直线插补和圆弧插补: 一.直线插补原理: 如图所示的平面斜线AB ,以斜线起点A 的坐标为x0,y0,斜线AB 的终点坐标为(xe ,ye),则此直线方程为: 00 00Y Ye X Xe Y Y X X --= -- 取判别函数F =(Y —Y0)(Xe —Xo)—(X-X0)(Ye —Y0)
串级控制系统
过程控制 实验报告实验名称:串级控制班级: 姓名: 学号:
实验二 串级控制系统 一、实验目的 1) 通过本实验,了解串级控制系统的基本结构以及主、副回路的性能特点。 2) 掌握串级控制系统的设计思想和主、副回路控制器的参数整定方法。 二、 实验原理 串级控制系统由两个或两个以上的控制器、相应数量的检测变送器和一个执行器组成。控制器相串联,副控制器的输入由主控制器的输出设定。主回路是恒值控制系统,对主控制器的输出而言,副回路是随动系统,对二次扰动而言,副回路是恒值控制系统。 串级控制的主要优点可概括如下: 1) 由于副回路的存在,改善了对象的部分特性,使系统的工作频率提高,加快了调节过程。 2) 由于副回路的存在,串级控制系统对二次扰动具有较强的克服能力。 3) 串级控制系统提高了克服一次扰动的能力和回路参数变化的自适应能力。 串级控制系统副回路的设计原则: 1) 副回路应尽量包含生产过程中主要的、变化剧烈、频繁和幅度大的扰动。在可能的情况下力求包含尽可能多的扰动。 2) 当对象具有较大纯滞后时,在设计时应使副回路尽量少包括或不包括纯滞后。 3) 当对象具有非线性环节时,在设计时应使非线性环节于副环之中。 4) 副回路设计时应考虑主、副对象时间常数的匹配,以防共振。 5) 所设计的副回路需考虑到方案的经济性和工艺的合理性。 串级控制系统常用的控制器参数整定方法有逐步逼近法、两步法、一步法等。 ? 逐步逼近法 1) 在主回路断开的情况下,求取副控制器的整定参数; 2) 将副控制器的参数设置在所求的数值上,使串级控制系统主回路闭合,以求取主调节器的整定参数值; 3) 将主调节器参数设置在所求值上,再次整定副控制器的参数值。 4) 如控制品质未达到指标,返回2)继续。 三、实验内容 某系统的主、副对象传递函数分别为: 122 11 (),()301(101)(1)P P G s G s s s s = = +++
控制系统仿真实验报告
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
实验报告格式
实验报告格式
社会实践报告
课程名称: 社会实践 班级与班级代码: 082503061 专业: 税务 指导教师:赵永坚 学号:0825******* 姓名:杨顺 提交日期:2010 年9月 6 日 广东商学院教务处制 姓名实验报告成绩 评语:
指导教师(签名) 年月日 说明:指导教师评分后,实验报告交院(系)办公室保存 报关员之初体验 财税学院杨顺 摘要: 自从走入了大学,就业问题似乎总是围绕在我们的身边,成了说不完的话题。在现今社会上,招聘会上的大字报总是写着:“有经验者优先。”可还在校园里的我们这班学子又能有多少经验呢?为了拓展自身的知识面,扩大与社会的接触面,增加个人在社会竞争中的经验,锻炼和提高自己的能力,以便毕业后能真正的进入社会,能够适应国内外经济形势的变化,并且在生活中和工作中能够很好的处理各方面的问题,在7月22日到8月22日这一个月里,我走进了一家民营企业,开始了我这个暑假的社会实践。我主要的任务是做报关员刘先生的下手,跟着他到处跑,帮他整理资料,学习着怎样成为一个合格的报关员。我的专业是税务,所以对出口货物的报税和退税我着重了解了。通过这次实践,我受益匪浅。
正文: 首先介绍一下我的实习单位:广州市意华塑料包装有限公司。广州市意华塑料包装有限公司位于广东省从化市石海工业区,主营塑料餐具制作和包装,货物主要销往香港和欧洲。 在实践的一个月时间里,我跟着报关员到处跑,帮他整理资料,准备各种证件等,感受着工作的氛围。这些都是在学校里没法感受到的。在学校里,老师会说今天做什么,明天做什么,但在这里,不一定会有人告诉你这些,你必须自觉地去做,并尽自己的能力做到最好。学校是一个象牙塔,只有学习的氛围,但这里是工作场所,每个人都为了获得更高的报酬而努力,无论是学习还是工作,都存在竞争,在竞争中就要不断学习其他人先进的地方,也要学习别人怎么做人。在职场,人际关系的好坏非常重要。走进企业,每天我都会接触到不用的人,同事、上司等,关系复杂,我得去面对我从来未面对过的一切。在大学很多人都会说这样一个问题,学生的实际操作能力和在校理论水平存在差距。这一点我在实践中感受特深。在学校,理论的学习很多,几乎面面俱到;而在实际工作中,可能会遇到书本上没有学到的,又或者是跟书本上的知识一点联系都没有的,甚至还有书本理论繁复,但实际操作非常简单的情况。只懂得纸上谈兵是远远不够的,以后的人生路漫漫,必须锻炼自己成为一名合格的、对社会有用的人。 在为期一个月的实践中,我不但巩固了旧知识还学到了很多新知识。首先我知道了海关的基本性质和任务、海关的权力、海关的组织机构和管理体制、报关的概念和分类、报关的范围和基本内容等内容;掌握
《流体力学》课程实验(上机)指导书及实验报告格式
《流体力学》课程实验指导书袁守利编 汽车工程学院 2005年9月
前言 1.实验总体目标、任务与要求 1)学生在学习了《流体力学》基本理论的基础上,通过伯努利方程实验、动量方程实 验,实现对基本理论的验证。 2)通过实验,使学生对水柱(水银柱)、U型压差计、毕托管、孔板流量计、文丘里流量计等流体力学常用的测压、测流量装置的结构、原理和使用有基本认识。 2.适用专业 热能与动力工程 3.先修课程 《流体力学》相关章节。 4.实验项目与学时分配 5. 实验改革与特色 根据实验内容和现有实验条件,在实验过程中,采取学生自己动手和教师演示相结合的方法,力求达到较好的实验效果。
实验一伯努利方程实验 1.观察流体流经实验管段时的能量转化关系,了解特定截面上的总水头、测压管水头、压强水头、速度水头和位置水头间的关系,从而加深对伯努利方程的理解和认识。 2.掌握各种水头的测试方法和压强的测试方法。 3.掌握流量、流速的测量方法,了解毕托管测速的原理。 二、实验条件 伯努利方程实验仪 三、实验原理 1.实验装置: 图一伯努利方程实验台 1.水箱及潜水泵 2.上水管 3.电源 4.溢流管 5.整流栅 6.溢流板 7.定压水箱 8.实验 细管9. 实验粗管10.测压管11.调节阀12.接水箱13.量杯14回水管15.实验桌 2.工作原理 定压水箱7靠溢流来维持其恒定的水位,在水箱下部装接水平放置的实验细管8,水经实验细管以恒定流流出,并通过调节阀11调节其出水流量。通过布置在实验管四个截面上的四组测压孔及测压管,可以测量到相应截面上的各种水头的大小,从而可以分析管路中恒定流动的各种能量形式、大小及相互转化关系。各个测量截面上的一组测压管都相当于一组毕托管,所以也可以用来测管中某点的流速。 电测流量装置由回水箱、计量水箱和电测流量装置(由浮子、光栅计量尺和光电子
北京化工大学过程控制工程串级控制系统实验报告
实验名称:串级控制实验 班级:自控 实验设备编号: 2 实验日期:年月 同组人: 年月日
实验名称:串级控制系统 实验的目的:正确认识串级控制系统,理解和熟练串级控制系统的特点和操作要求。 实验的要求:正确理解串级控制系统的特点,结合本实验装置的情况,构建一个以下水箱液位H2为主被控参数,上水箱液位H1为副被控参数,进水流量为控制手段的液位-液位串级控制系统。 实验过程的主要步骤: 1、构建串级控制系统,在软件中组态。 2、对串级控制系统进行正确的设置,确保系统的连接方式正确,正反作用正确。 3、系统启动后将调节阀CV101,CV102的开度设置在50%,80%左右。 4、待系统达到稳定,按照先副后主的顺序将串级控制系统投入自动,投运过程无扰动串级控制系统参数整定,使用一步法 1、系统流程图: 系统方框图:
串级控制系统因为具有主副两个控制回路,从传递方式来看,是串联的进行工作,主回路的输出是通过副回路起作用;按照回路闭合向来看,副回路被包括在主回路中,可以看成一个具有一定跟踪能力的控制环节,它以主回路的输出作为跟踪目标。由于副回路的存在,分担了系统中的部分容量滞后和部分干扰的镇定作用,使系统的整体放大倍数、静态控制精度、系统抗干扰能力和工作频率等指标都提高到一个新的高度。 2、为了主变量的稳定,主控制器必须具有积分作用;副环是一个随动系统,它的给定值随主控制器输出的变化而变化为了能快速跟踪,一般只需采取比例式。 主副控制器的正反作用确定应遵循先副后主的原则。为了使副回路构成一个稳定的系统,副环内所有放大倍数各环节放大倍数的乘积应是负号;主控制器的正反作用也是根据主环内各个环节的乘积为负来确定,一般,主变送器为正,副回路为正,主控制器的正反作用只取决于主对象放大倍数的符号。 投运时要按照先副后主的顺序进行,先投运副回路,再投运主回路。无扰动投运的步骤:(1)、主副控制器均放于手动位置。主控制器放于内给定,副控制器放于外给定;将主副控制器正反作用开关置于正确位置;主副控制器参数放于预定数值。 (2)、用副控制器的手操器进行手操作。 (3)、当遥控使主变量接近或等于给定值而副变量也较平稳时,调节主控制器的手操旋钮,使副控制器的偏差表指示为零,这时副控制器的自动电流将跟踪等于手动电流,于是可将副控制器切入自动。由于切换前控制器的自动电流等于手动电流,自动电流信号等于手动电流信号就意味着切换时刻不会造成控制阀阀位变化,因此切换是无扰动的。 (4)、当副环切入自动后控制稳定,主变量接近或等于给定值时,调整主控制器的内给定旋钮,使主控制器偏差表指示为零。此时主控制器的自动输出电流跟踪等于手动输出电流,于是可将主控制器切入自动。至此,系统则处于串级工作状态,而切换是无扰动的。 3、串级系统的参数整定: 与单回路的情况相同,串级控制系统也是在控制系统器投入自动后,通常并不能保证控
自动控制原理及系统仿真课程设计
自动控制原理及系统仿 真课程设计 学号:1030620227 姓名:李斌 指导老师:胡开明 学院:机械与电子工程学院
2013年11月
目录 一、设计要求 (1) 二、设计报告的要求 (1) 三、题目及要求 (1) (一)自动控制仿真训练 (1) (二)控制方法训练 (19) (三)控制系统的设计 (23) 四、心得体会 (27) 五、参考文献 (28)
自动控制原理及系统仿真课程设计 一:设计要求: 1、 完成给定题目中,要求完成题目的仿真调试,给出仿真程序和图形。 2、 自觉按规定时间进入实验室,做到不迟到,不早退,因事要请假。严格遵守实验室各项规章制度,实验期间保持实验室安静,不得大声喧哗,不得围坐在一起谈与课程设计无关的空话,若违规,则酌情扣分。 3、 课程设计是考查动手能力的基本平台,要求独立设计操作,指导老师只检查运行结果,原则上不对中途故障进行排查。 4、 加大考查力度,每个时间段均进行考勤,计入考勤分数,按照运行的要求给出操作分数。每个人均要全程参与设计,若有1/3时间不到或没有任何运行结果,视为不合格。 二:设计报告的要求: 1.理论分析与设计 2.题目的仿真调试,包括源程序和仿真图形。 3.设计中的心得体会及建议。 三:题目及要求 一)自动控制仿真训练 1.已知两个传递函数分别为:s s x G s x G +=+= 22132)(,131)(
①在MATLAB中分别用传递函数、零极点、和状态空间法表示; MATLAB代码: num=[1] den=[3 1] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) num=[2] den=[3 1 0] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) 仿真结果: num =2 den =3 1 0 Transfer function: 2 --------- 3 s^2 + s
实验一电力拖动自动控制系统实验报告
第五章仿真及实验 第一节晶闸管直流调速系统参数和环节特性的测定 一、实验目的 1 熟悉晶闸管直流调速系统的组成及其基本结构。 2掌握晶闸管直流调速系统参数及反馈环节测定方法。 二、实验原理 晶闸管直流调速系统由整流变压器、晶闸管整流跳水装置、平波电抗器、电动机-发电机组等组成。 在本实验中,整流装置的主电路喂三相桥式电路,控制电路可直接由给定电压Ug作为触发器的移相控制电压Ua。改变Ug的大小即可改变控制角a,从而获得可调的直流电压,以满足实验要求。实验系统的组成原理如图5.1所示。 三.实验内容 1测定晶闸管直流调速系统主电路总电阻值R。 2测定晶闸管直流系统电路电感值L.. 3测定直流电机-直流发电机-测速发电机的飞轮惯量GD的平方。 4测定晶闸管直流调速系统主电路电磁时间常数Td。
5测定直流电动机电势常数Ce和转矩常数Cm。 6测定晶闸管直流调速系统机电时间常数Tm。 7测定晶闸管触发及整流装置特性Ud=f(Ue)。 8测定测速发电机特性Utg=f(n)。 四.实验仿真 晶闸管直流调速系统的原理如图5.1所示。该系统由给定信号、同步脉冲触发器、晶闸管整流桥、平波电抗器、直流电动机等部分组成。图5.2势采用面向电气原理图方法构成的晶闸管直流系统的仿真模型。下面介绍各部分建模与参数设置过程。 1.系统的建模和模型参数设置 系统的建模包括主电路的建模和控制电路的建模俩部分。 1)主电路的建模和参数设置 由图5.2可见,开环直流调速系统的主电路由三相对称交流电压器、晶闸管整流桥、平波电抗器、直流电动机等部分组成。由于同步脉冲与晶闸管整流桥是不可分割的两个环节,通常作为一个组合体讨论,所以将触发器归到主电路进行建模。 2)三相整流桥时,桥臂数取3,A,B,C三相交流电源接到整流桥的输入端,