《智能控制技术大作业》(神经网络控制部分)

基于神经模糊控制的洗衣机设计
20世纪90年代初期,日本松下电器公司推出了神经模糊控制全自动洗衣机。这种洗衣机能够自动判断衣物的质地软硬程度、洗衣量、脏污程度和性质等,应用神经模糊控制技术,自动生成模糊控制规则和隶属度函数,预设洗衣水位、水流强度和洗涤时间,在整个洗衣过程中实时调整这些参数,以达到最佳的洗衣效果。
一、洗衣机的模糊控制
洗衣机的主要被控变量为洗涤时间和洗涤时的水流强度,而影响输出变量的主要因子是被洗涤物的浑浊程度和浑浊性质,后者可用浑浊度的变化率来描述。在洗涤过程中,油污的浑浊度变化率小,泥污的浑浊度变化率大。因此,浑浊度及其变化率可以作为控制系统的输入变量,而洗涤时间和水流强度可作为控制量,即系统的输出。实际上,洗衣过程中的这类输入和输出之间很难用数学模型进行描述。系统运行过程中具有较大的不确定性,控制过程在很大程度上依赖操作者的经验,这样一来,利用常规的方法进行控制难以奏效。然而,如果利用专家知识进行控制决策,往往容易实现优化控制,这就是在洗衣机中引入模糊控制技术的主要原因之一。
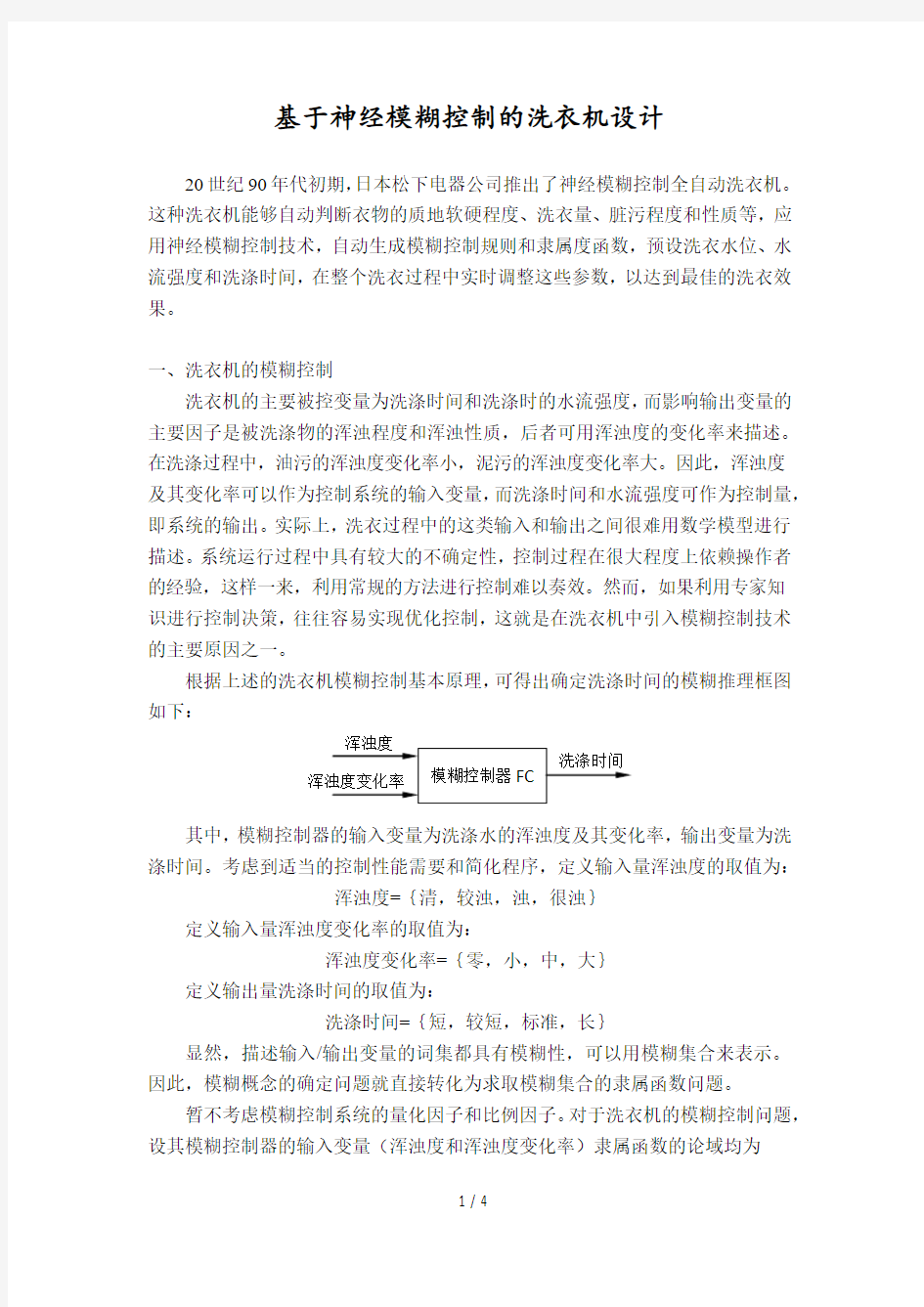
根据上述的洗衣机模糊控制基本原理,可得出确定洗涤时间的模糊推理框图如下:
其中,模糊控制器的输入变量为洗涤水的浑浊度及其变化率,输出变量为洗涤时间。考虑到适当的控制性能需要和简化程序,定义输入量浑浊度的取值为:
浑浊度={清,较浊,浊,很浊}
定义输入量浑浊度变化率的取值为:
浑浊度变化率={零,小,中,大}
定义输出量洗涤时间的取值为:
洗涤时间={短,较短,标准,长}
显然,描述输入/输出变量的词集都具有模糊性,可以用模糊集合来表示。因此,模糊概念的确定问题就直接转化为求取模糊集合的隶属函数问题。
暂不考虑模糊控制系统的量化因子和比例因子。对于洗衣机的模糊控制问题,设其模糊控制器的输入变量(浑浊度和浑浊度变化率)隶属函数的论域均为
输入变量论域={0,1,2,3,4,5,6}
模糊控制器的输出变量(洗涤时间)隶属度函数的论域为
输出变量论域={0,1,2,3,4,5,6,7}
每个模糊变量属于上述论域的模糊子集如表1所示。
根据专家的洗涤操作经验,可以将洗衣机的这些操作经验归纳为16条模糊控制规则,如表2所示。
二、洗衣机的神经网络模糊控制
表2中的模糊控制规则虽然比较合理,但一旦确定后,则只能按照这些规则进行控制,缺乏灵活性,对于复杂多变的衣物情况来说,其适应能力较差,洗衣效果不够理想。而把神经网络与模糊控制结合起来,则能够很好地解决这些问题。
洗衣机的神经网络模糊控制是让神经网络来学习模糊控制规则,利用离线训练好的神经网络,通过在线计算即可得到最佳输出(即最佳洗涤时间)。相对于查表式的模糊控制方式,神经网络控制方式的运算速度要快得多,而且神经网络还具有自学习和联想记忆功能。对于没有学习过的样本,神经网络可以通过联想记忆的方式,按照其记忆的映射关系,快速做出(即计算出)控制决策,具有相
当高的精确性、适应性和灵活性,控制效果比单纯的模糊控制要好得多。
洗衣机的神经网络模糊控制系统结构如下图所示。
其中,输入层的神经元数为14个,71~x x 为输入变量浑浊度的模糊子集,
148~x x 为输入变量浑浊度变化率的模糊子集,81~y y 为输出变量洗涤时间的模糊子集。从模糊控制规则表(表2)可以看出,该模糊控制系统共有16条控制规则,每条规则都是一对样本,则共有16对样本。
例如,根据模糊控制规则表(表2),当浑浊度为“清”,浑浊度变化率为“小”时,洗涤时间为“较短”,这个样本可以表示为:
]0,0,0,5.0,1,5.0,0,0,0,0,0,1.0,6.0,1[=x ,]0,0,0,1.0,6.0,1,6.0,1.0[=y
其中,x 中的各元素为两个输入模糊变量对应的模糊子集(7+7=14个),y 中的各元素为输出模糊变量对应的模糊子集(8个)。用同样的方式可以列出其它15个样本对。将这16个样本对神经网络进行离线学习训练,训练完成后,这个神经网络就记住了上述16条模糊控制规则所隐含的多输入多输出(14个输入8个输出)函数映射关系。训练好的神经网络可用于在线工作,利用神经网络的联想记忆功能,以实时产生模糊控制规则。 三、要求
1. 根据给定的控制对象,设计出模糊控制系统的论域、模糊子集、各变量的隶属度函数、模糊控制规则等;
2. 设计洗衣机神经模糊控制系统的结构;
3. 根据设计好的模糊控制系统,提取训练神经网络用的学习样本;
4. 用Matlab 编程实现神经网络的学习训练,并检验其有效性。其中,训练终止条件:迭代1000次或训练误差为0.001;
5. 当输入样本为:]'0,0,0,48.0,98.0,48.0,0,0,0,0,0,1.0,58.0,98.0[~141=x x 时的控制输出(短,较短,标准,长)是什么?
6. 从基于神经网络的模糊控制的合理性和有效性等方面进行实验结果分析。 注意:
(1) 实验结果分析部分不少于300字;
1
x 2x x 2
y 1
y 8
y
(2)文字表述要规范,尽量少用口语化的表述;(3)matlab代码不能截图;
基于BP神经网络的PID控制器的设计
基于BP神经网络的PID控制器的研究与 实现 课程名称:人工神经网络
目录 前言 (3) 一、BP神经网络 (4) 二、模拟PID控制系统 (5) 三、基于BP神经网络的PID控制器 (6) 四、仿真程序 (10) 五、运行结果 (17) 六、总结 (18) 参考文献 (19)
前言 人工神经网络是以一种简单神经元为节点,采用某种网络拓扑结构构成的活性网络,可以用来描述几乎任意的非线性系统。不仅如此,人工神经网络还具有学习能力、记忆能力、计算能力以及各种智能处理能力,在不同程度和层次上模仿人脑神经系统的信息处理、存储和检索的功能。不同领域的科学家,对人工神经网络有着不同的理解、不同的研究内容,并且采用不同的研究方法。对于控制领域的研究工作者来说,人工神经网络的魅力在于:①能够充分逼近任意复杂的非线性关系,从而形成非线性动力学系统,以表示某种被控对象的模型或控制器模型;②能够学习和适应不确定性系统的动态特性;③所有定量或定性的信息都分布储存于网络内的各神经单元,从而具有很强的容错性和鲁棒性;④采用信息的分布式并行处理,可以进行快速大量运算。对于长期困扰控制界的非线性系统和不确定性系统来说,人工神经网络无疑是一种解决问题的有效途径。正因为如此,把人工神经网络引入传统的PID 控制,将这两者结合,则可以在一定程度上解决传统PID 调节器不易在线实时整定参数、难于对一些复杂过程和参数慢时变系统进行有效控制的不足。
一、BP神经网络 BP神经网络是一种有隐含层的多层前馈网络,其结构如图1-1所示。如果把具有M个输入节点和L个输出节点的BP神经网络看成是从M维欧氏空间到L维欧氏空间的非线性映射,则对于具有一定非线性因数的工业过程被控对象,采用BP网络来描述,不失为一种好的选择。在BP神经网络中的神经元多采用S型函数作为活化函数,利用其连续可导性,便于引入最小二乘学习算法,即在网络学习过程中,使网络的输出与期望输出的误差边向后传播边修正加权系数,以期使误差均方值最小。BP神经网络的学习过程可分为前向网络计算和反向误差传播——连接加权系数修正两个部分,这两个部分是相继连续反复进行的,直至误差满足要求。不论学习过程是否已经结束,只要在网络的输入节点加入输入信号,则这些信号将一层一层向前传播;通过每一层时要根据当时的连接加权系数和节点的活化函数与阈值进行相应计算,所得的输出再继续向下一层传输。这个前向网络计算过程,既是网络学习过程的一部分,也是将来网络的工作模式。在学习过程结束之前,如果前向网络计算的输出和期望输出之间存在误差,则转入反向传播,将误差沿着原来的连接通路回送,作为修改加权系数的依据,目标是使误差减小。
神经网络在PLC控制系统中的应用
神经网络在PLC控制系统中的应用 2010-11-11 18:30:00 来源:中国自动化网浏览:47 网友评论条点击查看 摘要:神经网络具有自学习、自调整、自适应能力。本文介绍了由PLC控制实现的神经网络PID自适应控制器。实验表明,该技术对于提高控制精度是行之有效的。具有在调速系统中推广应用的价值。 关键词:PLC;PID控制器;神经网络;直流调速系统 一、引言 虽然目前的交、直流传动系统都有较成熟的控制方案,采用线性PI或PID 调节器可以取得基本满意的控制效果。但是,常参数的PID调节器只对线形系统有效,它们的控制性能因为系统的非线性而降低。在电力传动系统中,虽可以建立电机模型,但是电机本身和负载的一些参数(如交流电机的转子电阻、拖动负载的转动惯量)是无法确定的、时变的。电气设备的机械饱和特性,开关的失控时间、控制延时都是不能精确建模的非线性因素。然而将模糊与神经网络技术引入电力传动系统设计智能控制器却可以很好地克服电力传动对象变参数、非线性等问题,大大提高系统的鲁棒性。引入模糊与神经网络技术的主要优点是不需要过程的复杂模型,而且适应性强,容易实现。 本文是将PID控制规律融进神经网络[3]之中,实现神经网络与PID控制规律的本质结合,共同完成PID自适应调节,并用PLC实现神经网络PID自适应控制,确保电力传动系统的控制精度和可靠性。 二、PID自适应控制器 常规PID控制算法为: (1) 用求和代替积分,微分用有限差分代替,即上式为: (2) 式中T为采样周期,KP是比例系数,KI=KP/TI是积分比例系数,KD=KPTD是微分比例系数。 根据上式,组成由两层线性神经网络构造的控制器,如图1所示。它是由比例、积分、微分三个单元组成的一种动态前向网络,各层神经元个数、连接方式、连接权值是按PID 控制规律的基本原则和已有的经验确定,能够保证系统的稳定和快速收敛。
智能控制(神经网络)-作业
智能控制作业 学生: 学 号: 专业班级: 7-2 采用BP 网路、RBF 网路、DRNN 网路逼近线性对象 2) 1(1)1(9.0)1()(-+-?--=k y k y k u k y ,分别进行matlab 仿真。 (一)采用BP 网络仿真 网络结构为2-6-1。采样时间1ms ,输入信号)6sin(5.0)(t k u ?=π,权值21,W W 的初值随机取值,05.0,05.0==αη。 仿真m 文件程序为: %BP simulation clear all; clear all; xite=0.5; alfa=0.5; w1=rands(2,6); % value of w1,initially by random w1_1=w1;w1_2=w1; w2=rands(6,1); % value of w2,initially by random w2_1=w2;w2_2=w2_1; dw1=0*w1; x=[0,0]'; u_1=0; y_1=0; I=[0,0,0,0,0,0]'; % input of yinhanceng cell Iout=[0,0,0,0,0,0]'; % output of yinhanceng cell FI=[0,0,0,0,0,0]'; ts=0.001; for k=1:1:1000 time(k)=k*ts;
u(k)=0.5*sin(3*2*pi*k*ts); y(k)=(u_1-0.9*y_1)/(1+y_1^2); for j=1:1:6 I(j)=x'*w1(:,j); Iout(j)=1/(1+exp(-I(j))); end yn(k)=w2'*Iout; %output of network e(k)=y(k)-yn(k); % error calculation w2=w2_1+(xite*e(k))*Iout+alfa*(w2_1-w2_2); % rectify of w2 for j=1:1:6 FI(j)=exp(-I(j))/(1+exp(-I(j))^2); end for i=1:1:2 for j=1:1:6 dw1(i,j)=e(k)*xite*FI(j)*w2(j)*x(i); % dw1 calculation end end w1=w1_1+dw1+alfa*(w1_1-w1_2); % rectify of w1 % jacobian information yu=0; for j=1:1:6 yu=yu+w2(j)*w1(1,j)*FI(j); end dyu(k)=yu; x(1)=u(k); x(2)=y(k); w1_2=w1_1;w1_1=w1; w2_2=w2_1;w2_1=w2; u_1=u(k); y_1=y(k); end figure(1); plot(time,y,'r',time,yn,'b'); xlabel('times');ylabel('y and yn');
神经网络模型预测控制器
神经网络模型预测控制器 摘要:本文将神经网络控制器应用于受限非线性系统的优化模型预测控制中,控制规则用一个神经网络函数逼近器来表示,该网络是通过最小化一个与控制相关的代价函数来训练的。本文提出的方法可以用于构造任意结构的控制器,如减速优化控制器和分散控制器。 关键字:模型预测控制、神经网络、非线性控制 1.介绍 由于非线性控制问题的复杂性,通常用逼近方法来获得近似解。在本文中,提出了一种广泛应用的方法即模型预测控制(MPC),这可用于解决在线优化问题,另一种方法是函数逼近器,如人工神经网络,这可用于离线的优化控制规则。 在模型预测控制中,控制信号取决于在每个采样时刻时的想要在线最小化的代价函数,它已经广泛地应用于受限的多变量系统和非线性过程等工业控制中[3,11,22]。MPC方法一个潜在的弱点是优化问题必须能严格地按要求推算,尤其是在非线性系统中。模型预测控制已经广泛地应用于线性MPC问题中[5],但为了减小在线计算时的计算量,该部分的计算为离线。一个非常强大的函数逼近器为神经网络,它能很好地用于表示非线性模型或控制器,如文献[4,13,14]。基于模型跟踪控制的方法已经普遍地应用在神经网络控制,这种方法的一个局限性是它不适合于不稳定地逆系统,基此本文研究了基于优化控制技术的方法。 许多基于神经网络的方法已经提出了应用在优化控制问题方面,该优化控制的目标是最小化一个与控制相关的代价函数。一个方法是用一个神经网络来逼近与优化控制问题相关联的动态程式方程的解[6]。一个更直接地方法是模仿MPC方法,用通过最小化预测代价函数来训练神经网络控制器。为了达到精确的MPC技术,用神经网络来逼近模型预测控制策略,且通过离线计算[1,7.9,19]。用一个交替且更直接的方法即直接最小化代价函数训练网络控制器代替通过训练一个神经网络来逼近一个优化模型预测控制策略。这种方法目前已有许多版本,Parisini[20]和Zoppoli[24]等人研究了随机优化控制问题,其中控制器作为神经网络逼近器的输入输出的一个函数。Seong和Widrow[23]研究了一个初始状态为随机分配的优化控制问题,控制器为反馈状态,用一个神经网络来表示。在以上的研究中,应用了一个随机逼近器算法来训练网络。Al-dajani[2]和Nayeri等人[15]提出了一种相似的方法,即用最速下降法来训练神经网络控制器。 在许多应用中,设计一个控制器都涉及到一个特殊的结构。对于复杂的系统如减速控制器或分散控制系统,都需要许多输入与输出。在模型预测控制中,模型是用于预测系统未来的运动轨迹,优化控制信号是系统模型的系统的函数。因此,模型预测控制不能用于定结构控制问题。不同的是,基于神经网络函数逼近器的控制器可以应用于优化定结构控制问题。 在本文中,主要研究的是应用于非线性优化控制问题的结构受限的MPC类型[20,2,24,23,15]。控制规则用神经网络逼近器表示,最小化一个与控制相关的代价函数来离线训练神经网络。通过将神经网络控制的输入适当特殊化来完成优化低阶控制器的设计,分散和其它定结构神经网络控制器是通过对网络结构加入合适的限制构成的。通过一个数据例子来评价神经网络控制器的性能并与优化模型预测控制器进行比较。 2.问题表述 考虑一个离散非线性控制系统: 其中为控制器的输出,为输入,为状态矢量。控制
研究生必备的人工神经网络电子书汇总(31本)
研究生必备的人工神经网络电子书汇总(31本) 这些都是我从淘宝和百度文库里面搜集到的电子书,需要的可以联系我 QQ:415295747,或者登录我的博客https://www.360docs.net/doc/4310246919.html,/u/1723697742 1.神经网络在应用科学和工程中的应用——从基础原理到复杂的模式识别 5 译者序 6 前 9 致谢 10 作者简介 11 目录 19 第1章从数据到模型:理解生物学、生态学和自然系统的复杂性和挑战 27 第2章神经网络基础和线性数据分析模型 72 第3章用于非线性模式识别的神经网络 105 第4章神经网对非线性模式的学习 166 第5章从数据中抽取可靠模式的神经网络模型的实现 205 第6章数据探测、维数约简和特征提取 235 第7章使用贝叶斯统计的神经网络模型的不确定性评估 276 第8章应用自组织映射的方法发现数据中的未知聚类 359 第9章神经网络在时间序列预测中的应用 458 附录 2.MATLB 神经网络30个案例分析 第1章BP神经网络的数据分类——语音特征信号分类 23 第2章BP神经网络的非线性系统建模——非线性函数拟合 33 第3章遗传算法优化BP神经网络——非线性函数拟合 48 第4章神经网络遗传算法函数极值寻优——非线性函数极值寻优 57 第5章基于BP_Adsboost的强分类器设计——公司财务预警建模 66 第6章PID神经元网络解耦控制算法——多变量系统控制 77 第7章RBF网络的回归——非线性函数回归的实现 85 第8章GRNN的数据预测——基于广义回归神经网络的货运量预测 93 第9章离散Hopfield神经网络的联想记忆——数字识别 102 第10章离散Hopfield神经网络的分类——高校科研能力评价 112 第11章连续Hopfield神经网络的优化——旅行商问题优化计算 124 第12章SVM的数据分类预测——意大利葡萄酒种类识别 134 第13章SVM的参数优化——如何更好的提升分类器的性能
神经网络控制
人工神经网络控制 摘要: 神经网络控制,即基于神经网络控制或简称神经控制,是指在控制系统中采用神经网络这一工具对难以精确描述的复杂的非线性对象进行建模,或充当控制器,或优化计算,或进行推理,或故障诊断等,亦即同时兼有上述某些功能的适应组合,将这样的系统统称为神经网络的控制系统。本文从人工神经网络,以及控制理论如何与神经网络相结合,详细的论述了神经网络控制的应用以及发展。 关键词: 神经网络控制;控制系统;人工神经网络 人工神经网络的发展过程 神经网络控制是20世纪80年代末期发展起来的自动控制领域的前沿学科之一。它是智能控制的一个新的分支,为解决复杂的非线性、不确定、不确知系统的控制问题开辟了新途径。是(人工)神经网络理论与控制理论相结合的产物,是发展中的学科。它汇集了包括数学、生物学、神经生理学、脑科学、遗传学、人工智能、计算机科学、自动控制等学科的理论、技术、方法及研究成果。 在控制领域,将具有学习能力的控制系统称为学习控制系统,属于智能控制系统。神经控制是有学习能力的,属于学习控制,是智能控制的一个分支。神经控制发展至今,虽仅有十余年的历史,已有了多种控制结构。如神经预测控制、神经逆系统控制等。 生物神经元模型 神经元是大脑处理信息的基本单元,人脑大约含1012个神经元,分成约1000种类型,每个神经元大约与102~104个其他神经元相连接,形成极为错综复杂而又灵活多变的神经网络。每个神经元虽然都十分简单,但是如此大量的神经元之间、如此复杂的连接却可以演化出丰富多彩的行为方式,同时,如此大量的神经元与外部感受器之间的多种多样的连接方式也蕴含了变化莫测的反应方式。 图1 生物神经元传递信息的过程为多输入、单输出,神经元各组成部分的功能来看,信息的处理与传递主要发生在突触附近,当神经元细胞体通过轴突传到突触前膜的脉冲幅度达到一定强度,即超过其阈值电位后,突触前膜将向突触间隙释放神经传递的化学物质,突触有两
神经网络的应用及其发展
神经网络的应用及其发展 [摘要] 该文介绍了神经网络的发展、优点及其应用和发展动向,着重论述了神经网络目前的几个研究热点,即神经网络与遗传算法、灰色系统、专家系统、模糊控制、小波分析的结合。 [关键词]遗传算法灰色系统专家系统模糊控制小波分析 一、前言 神经网络最早的研究20世纪40年代心理学家Mcculloch和数学家Pitts合作提出的,他们提出的MP模型拉开了神经网络研究的序幕。神经网络的发展大致经过三个阶段:1947~1969年为初期,在这期间科学家们提出了许多神经元模型和学习规则,如MP模型、HEBB学习规则和感知器等;1970~1986年为过渡期,这个期间神经网络研究经过了一个低潮,继续发展。在此期间,科学家们做了大量的工作,如Hopfield教授对网络引入能量函数的概念,给出了网络的稳定性判据,提出了用于联想记忆和优化计算的途径。1984年,Hiton教授提出Boltzman机模型。1986年Kumelhart等人提出误差反向传播神经网络,简称BP 网络。目前,BP网络已成为广泛使用的网络;1987年至今为发展期,在此期间,神经网络受到国际重视,各个国家都展开研究,形成神经网络发展的另一个高潮。神经网络具有以下优点: (1) 具有很强的鲁棒性和容错性,因为信息是分布贮于网络内的神经元中。 (2) 并行处理方法,使得计算快速。 (3) 自学习、自组织、自适应性,使得网络可以处理不确定或不知道的系统。 (4) 可以充分逼近任意复杂的非线性关系。 (5) 具有很强的信息综合能力,能同时处理定量和定性的信息,能很好地协调多种输入信息关系,适用于多信息融合和多媒体技术。 二、神经网络应用现状 神经网络以其独特的结构和处理信息的方法,在许多实际应用领域中取得了显著的成效,主要应用如下: (1) 图像处理。对图像进行边缘监测、图像分割、图像压缩和图像恢复。
基于S函数的RBF神经网络PID控制器
基于径向基函数的神经网络的PID控制器 摘要 RBF神经网络在分类问题中得到了广泛的应用,尤其是模式识别的问题。许多模式识别实验证明,RBF具有更有效的非线性逼近能力,并且RBF神经网络的学习速度较其他网络快。本文在具有复杂控制规律的S函数构造方法的基础上,给出了基于MATLAB语言的RBF神经网络PID控制器,及该模型的一非线性对象的仿真结果。 关键词:S函数;RBF神经网络PID控制器;Simulink仿真模型径向基函数(RBF-Radial Basis Function)神经网络是由J.Moody和C.Darken 在20世纪80年代末提出的一种神经网络,它具有单隐层的三层前馈网络。由于它模拟了人脑中局部调整、相互覆盖接受域(或称野-Receptive Field)的神经网络结构,因此,RBF神经网络是一种局部逼近网络,已证明它能以任意精度逼近任意连续函数。 1.S函数的编写方法 S函数是Simulink中的高级功能模块,Simulink是运行在MATLAB环境下用于建模、仿真和分析动态系统的软件包。只要所研究的系统模型能够由MATLAB语言加以描述,就可构造出相应的S函数,从而借助Simulink中的S 函数功能模块实现MATLAB与Simulink之间的沟通与联系,这样处理可以充分发挥MATLAB编程灵活与Simulink简单直观的各自优势。当系统采用较复杂的控制规律时,Simulink中没有现成功能模块可用,通常都要采用MATLAB编程语言,编写大量复杂而繁琐的源程序代码进行仿真,一是编程复杂、工作量较大,二来也很不直观。如果能利用Simulink提供的S函数来实现这种控制规律,就可以避免原来直接采取编程的方法,不需要编写大量复杂而繁琐的源程序,编程快速、简捷,调试方便,则所要完成的系统仿真工作量会大大减少。 RBF神经网络PID控制器的核心部分的S函数为: function [sys,x0,str,ts]=nnrbf_pid(t,x,u,flag,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0) switch flag,
基于神经网络的智能控制系统概述
神经网络的智能控制系统 摘要:介绍了神经网络的基本概念,论述了人工神经网络的产生与发展,以及人工神经网络在控制系统中的应用现状,分析了人工神经网络的特点和监视控制系统的原理,并阐述了几种基于神经网络的控制系统, 最后展望了基于神经网络控制的发展方向。 关键词:人工神经网络;控制系统;监视控制系统;智能控制; 1引言 基于神经网络的控制(NCC).神经网络控制是一门崭新的智能信息处理学科,研究非程序的、适应性的、大脑风格的信息处理的本质和能力。它的发展对人工智能、计算机科学、信息科学、非线性科学、认识科学、自动控制、微电子、模式识别、脑神经科学等产生了重要影响。 人工神经网络是一门发展十分迅速的交叉学科,它是由大量处理单元组成的非线性大规模自适应动力系统,具有学习能力、记忆能力、计算能力以及智能处理能力,并在不同程度和层次上模仿人脑神经系统的信息处理、存储及检索功能。同时,人工神经网络具有非线性、非局域性、非定常性、非凸性等特点,因此在智能控制、模式识别、计算机视觉、自适应滤波和信号处理、非线性优化、自动目标识别、连续语音识别、声纳信号的处理、知识处理、智能传感技术与机器人、生物医学工程等方面都有了长足的发展。 神经网络控制是一种基本上不依赖于模型的控制方法,它适合于具有不确定性或高度非线性的控制对象,并具有较强的自适应和自学习功能,因此是智能控制的一个重要分支领域。人工神经网络利用物理器件来模拟生物神经网络的某些结构和功能,具有并行和分布式的信息处理网络结构,该结构一般由几个神经元组成,每一个神经元有一个单一的输出,但可通过连接的很多其它神经元,获得有多个连接通道的输入,每个连接通道对应一个连接权系数。 2人工神经网络的产生与发展 早在1943年,美国神经生物学家W.S.McCul-loch就与数学家W.Pitts合作,采用数理模型的方法研究脑细胞的动作和结构,以及生物神经元的一些基本生理特征,提出第一个神经计算模型,即神经元的阈值元件模型(MP模型),并指出:即使是最简单的神经网络,从原则上讲也可以进行任意算术或逻辑函数的计算。1949年,D.O.Hebb提出了改变神经元连接强度的Hebb规则,其正确性30年后才得到证实,至今仍在各种神经网络模型中起着重要的作用。 1957年F.Rosenblatt提出并设计制作了著名的感知器(Perceptron),从而掀起第一次研究神经网络的热潮。1960年B.Windrow和M.E.Hoff提出自适应线性单元(Adaline)网络,这与当时占主导地位的以顺序离散符号推理为基本特征的AI途径完全不同,因而引起人们的兴趣,同时也引起符号主义与连接主义的争论。1969年M.Minsky和S.Papert编写了影响很大的《Perceptron》一书。
智能控制(神经网络)作业
智能控制作业 学生姓名: 学 号: 专业班级: 7-2 采用BP 网路、RBF 网路、DRNN 网路逼近线性对象 2 )1(1)1(9.0)1()(-+-?--=k y k y k u k y ,分别进行matlab 仿真。 (一)采用BP 网络仿真 网络结构为2-6-1。采样时间1ms ,输入信号)6sin(5.0)(t k u ?=π,权值21,W W 的初值随机取值,05.0,05.0==αη。 仿真m 文件程序为: %BP simulation clear all; clear all; xite=0.5; alfa=0.5; w1=rands(2,6); % value of w1,initially by random w1_1=w1;w1_2=w1; w2=rands(6,1); % value of w2,initially by random w2_1=w2;w2_2=w2_1; dw1=0*w1; x=[0,0]'; u_1=0; y_1=0; I=[0,0,0,0,0,0]'; % input of yinhanceng cell Iout=[0,0,0,0,0,0]'; % output of yinhanceng cell FI=[0,0,0,0,0,0]'; ts=0.001; for k=1:1:1000 time(k)=k*ts; u(k)=0.5*sin(3*2*pi*k*ts); y(k)=(u_1-0.9*y_1)/(1+y_1^2); for j=1:1:6 I(j)=x'*w1(:,j); Iout(j)=1/(1+exp(-I(j))); end yn(k)=w2'*Iout; %output of network e(k)=y(k)-yn(k); % error calculation w2=w2_1+(xite*e(k))*Iout+alfa*(w2_1-w2_2); % rectify of w2 for j=1:1:6
神经网络分析应用
基于动态BP神经网络的预测方法及其应用来源:中国论文下载中心 [ 08-05-05 15:35:00 ] 作者:朱海燕朱晓莲黄頔编辑:studa0714 摘要人工神经网络是一种新的数学建模方式,它具有通过学习逼近任意非线性映射的能力。本文提出了一种基于动态BP神经网络的预测方法,阐述了其基本原理,并以典型实例验证。 关键字神经网络,BP模型,预测 1 引言 在系统建模、辨识和预测中,对于线性系统,在频域,传递函数矩阵可以很好地表达系统的黑箱式输入输出模型;在时域,Box-Jenkins方法、回归分析方法、ARMA模型等,通过各种参数估计方法也可以给出描述。对于非线性时间序列预测系统,双线性模型、门限自回归模型、ARCH模型都需要在对数据的内在规律知道不多的情况下对序列间关系进行假定。可以说传统的非线性系统预测,在理论研究和实际应用方面,都存在极大的困难。相比之下,神经网络可以在不了解输入或输出变量间关系的前提下完成非线性建模[4,6]。神经元、神经网络都有非线性、非局域性、非定常性、非凸性和混沌等特性,与各种预测方法有机结合具有很好的发展前景,也给预测系统带来了新的方向与突破。建模算法和预测系统的稳定性、动态性等研究成为当今热点问题。目前在系统建模与预测中,应用最多的是静态的多层前向神经网络,这主要是因为这种网络具有通过学习逼近任意非线性映射的能力。利用静态的多层前向神经网络建立系统的输入/输出模型,本质上就是基于网络逼近能力,通过学习获知系统差分方程中的非线性函数。但在实际应用中,需要建模和预测的多为非线性动态系统,利用静态的多层前向神经网络必须事先给定模型的阶次,即预先确定系统的模型,这一点非常难做到。近来,有关基于动态网络的建模和预测的研究,代表了神经网络建模和预测新的发展方向。 2 BP神经网络模型 BP网络是采用Widrow-Hoff学习算法和非线性可微转移函数的多层网络。典型的BP算法采用梯度下降法,也就是Widrow-Hoff算法。现在有许多基本的优化算法,例如变尺度算法和牛顿算法。如图1所示,BP神经网络包括以下单元:①处理单元(神经元)(图中用圆圈表示),即神经网络的基本组成部分。输入层的处理单元只是将输入值转入相邻的联接权重,隐层和输出层的处理单元将它们的输入值求和并根据转移函数计算输出值。②联接权重(图中如V,W)。它将神经网络中的处理单元联系起来,其值随各处理单元的联接程度而变化。③层。神经网络一般具有输入层x、隐层y和输出层o。④阈值。其值可为恒值或可变值,它可使网络能更自由地获取所要描述的函数关系。⑤转移函数F。它是将输入的数据转化为输出的处理单元,通常为非线性函数。
pid神经网络控制器的设计
第三章 PID 神经网络结构及控制器的设计 在控制系统中,PID 控制是历史最悠久,生命力最强的控制方式,具有直观、实现简单和鲁棒性能好等一系列优点。但近年来随着计算机的广泛应用,智能控制被越来越广泛的应用到各种控制系统中。智能控制方法以神经元网络为代表,由于神经网络可实现以任意精度逼近任意函数,并具有自学习功能,因此适用于时变、非线性等特性未知的对象,容易弥补常规PID 控制的不足。将常规PID 控制同神经网络相结合是现代控制理论的一个发展趋势。 3.1 常规PID 控制算法和理论基础 3.1.1 模拟PID 控制系统 PID(Proportional 、Integral and Differential)控制是最早发展起来的控制策略之一,它以算法简单、鲁捧性好、可靠性高等优点而梭广泛应用于工业过程控制中。 PID 控制系统结构如图3.1所示: 图3.1 模拟PID 控制系统结构图 它主要由PID 控制器和被控对象所组成。而PID 控制器则由比例、积分、微分三个环节组成。它的数学描述为: 1() ()[()()]t p D i de t u t K e t e d T T dt ττ=+ +? (3.1) 式中,p K 为比例系数; i K 为积分时间常数: d K 为微分时间常数。 简单说来,PID 控制器各校正环节的主要控制作用如下: 1.比例环节即时成比例地反映控制系统的偏差信号()e t ,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
2.积分环节主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 3.微分环节能反映偏差信号的变化趋势(变化速率),并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。 具体说来,PID 控制器有如下特点: (1)原理简单,实现方便,是一种能够满足大多数实际需要的基本控制器; (2)控制器能适用于多种截然不同的对象,算法在结构上具有较强的鲁棒性,在很多情况下,其控制品质对被控对象的结构和参数摄动不敏感。 3.1.2 数字PID 控制算法 在计算机控制系统中,使用的是数字PID 控制器,数字PID 控制算法通常又分为位置式PID 控制算法和增量式PID 控制算法。 1.位置式PID 控制算法 由于计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量,故对式(3.1)中的积分和微分项不能直接使用,需要进行离散化处理。按模拟PID 控制算法的算式(3.1),现以一系列的采样时刻点kT 代表连续时间t ,以和式代替积分,以增量代替微分,则可以作如下的近似变换: t kT = (0,1,2,3...)k = ()()()k k t j j e t dt T e jT T e j ==≈=∑∑? ()()[(1)]()(1) de t e kT e k T e k e k dt T T ----≈= (3.2) 式中,T 表示采样周期。 显然,上述离散化过程中,采样周期T 必须足够短,才能保证有足够的精度。为了书写方便,将()e kT 简化表示()e k 成等,即省去T 。将式(3.2)代入到(3.1)中可以得到离散的PID 表达式为: 0(){()()[()(1)]}k D p j I T T u k K e k e j e k e k T T ==+ + --∑ (3.3) 或 0 ()()()[()(1)]}k p I D j u k K e k K e j K e k e k ==++--∑ (3.4) 式中,k ——采样序号,0,1,2...k =; ()u k ——第k 次采样时刻的计算机输出值;
基于BP神经网络的PID研究和改进
广东工业大学硕士学位论文 目录 摘要......................................................................................................................................... I ABSTRACT .............................................................................................................................II 目录...................................................................................................................................... IV CONTENTS ........................................................................................................................... VI 第一章绪论 . (1) 1.1 研究的背景和意义 (1) 1.2 国内外研究现状及分析 (3) 1.3 基于BP神经网络的PID控制器的不足 (5) 1.4 论文组织结构 (7) 第二章PID神经网络预备知识 (9) 2.1 人工神经网络的理论基础 (9) 2.2 BP神经网络的概述与介绍 (9) 2.2.1 BP神经网络 (10) 2.2.2 BP算法的数学表示 (10) 2.2.3 算法程序的实现 (12) 2.3 PID控制器介绍 (13) 2.4 PID神经元的算法 (14) 2.5 PIDNN的网络结构和算法 (17) 2.5.1 PIDNN前向算法 (18) 2.5.2 PIDNN的误差反向传播算法 (19) 2.6 PID神经网络控制单变量系统的稳定性分析 (20) 2.7 本章小结 (20) 第三章PID神经网络的动量项的研究与改进 (21) 3.1 常用的动量项类型 (21) 3.2 动量项的改进及仿真 (24) 3.3 本章小结 (27) 第四章PIDNN激励函数的改进 (28) 4.1 激励函数的类型 (28)
神经网络研究的现状
万方数据
万方数据
神经网络研究的现状 刊名: 甘肃科技纵横 英文刊名:SCIENTIFIC & TECHNICAL INFORMATION OF GANSU 年,卷(期):2006,35(4) 本文读者也读过(10条) 1.卢海林.王鑫改进的BP神经网络在单桩竖向承载力预测中的应用[期刊论文]-长江大学学报(自然科学版)2005,2(7) 2.张国栋.彭刚.王钊.朱暾BP神经网络在单桩承载力预测中的应用[期刊论文]-三峡大学学报(自然科学版) 2003,25(1) 3.张永央.陈新朝复合载体夯扩桩单桩竖向极限承载力研究[期刊论文]-资源环境与工程2008,22(z1) 4.王昆明.蒋洪胜.姜千君.WANG Kun-ming.JIANG Hong-sheng.JIANG Qian-jun嵌岩桩竖向承载力预测的遗传BP神经网络模型研究[期刊论文]-山东建筑大学学报2008,23(6) 5.刘世奇.潘冬子.陈静曦.LIU Shi-qi.PAN Dong-zi.Chen Jing-xi小波分析在基桩浅部缺陷检测中的应用[期刊论文]-无损检测2005,27(4) 6.刘曦文.LIU Xi-wen BP神经网络在地基承载力预测中的应用[期刊论文]-山西建筑2010,36(30) 7.蒋洪胜.戚靖骅.万立华.JIANG Hong-sheng.QI Jing-hua.WAN Li-hua基于遗传-BP神经网络预测单桩竖向承载力[期刊论文]-山东建筑工程学院学报2006,21(3) 8.牟粼琳.李卓球.林佳木.MOU Linlin.LI Zhuoqiu.LIN Jiamu低应变桩基检测模拟信号的小波分析系统研究[期刊论文]-武汉理工大学学报(信息与管理工程版)2008,30(3) 9.潘冬子.程升明.唐颖栋.Pan Dongzi.Cheng Shengming.Tang Yingdong小波神经网络在基桩缺陷诊断分析中的应用[期刊论文]-振动、测试与诊断2006,26(3) 10.熊水金基于小波分析的低应变反射波法测桩信号处理中的小波基选取[期刊论文]-内蒙古石油化工2008,34(7)本文链接:https://www.360docs.net/doc/4310246919.html,/Periodical_gskjzh200604024.aspx
智能控制大作业-神经网络
智能控制与应用实验报告神经网络控制器设计
一、 实验内容 考虑一个单连杆机器人控制系统,其可以描述为: 0.5sin()Mq mgl q y q τ+== 其中20.5M kgm =为杆的转动惯量,1m kg =为杆的质量,1l m =为杆长, 29.8/g m s =,q 为杆的角位置,q 为杆的角速度,q 为杆的角加速度, τ为系统的控制输入。具体要求: 1、设计神经网络控制器,对期望角度进行跟踪。 2、分析神经网络层数和神经元个数对控制性能的影响。 3、分析系统在神经网络控制和PID 控制作用下的抗干扰能力(加噪声干扰、加参数不确定)、抗非线性能力(加死区和饱和特性)、抗时滞的能力(对时滞大小加以改变)。 4、为系统设计神经网络PID 控制器(选作)。 二、 对象模型建立 根据公式(1),令状态量121=,x q x x = 得到系统状态方程为: 12121 0.5**sin() x x mgl x x M y x τ=-= = (1) 由此建立单连杆机器人的模型如图1所示。
图1 单连杆机器人模型 三、系统结构搭建及神经网络训练 1.系统PID结构如图2所示: 图2 系统PID结构图 PID参数设置为Kp=16,Ki=10,Kd=8得到响应曲线如图3所示:
01234 5678910 0.2 0.4 0.6 0.8 1 1.2 1.4 t/s a n g l e /r a d 图3 PID 控制响应曲线 采样PID 控制器的输入和输出进行神经网络训练 p=[a1';a2';a3']; t=b'; net=newff([-1 1;-1 1;-1 1],[3 8 16 8 1],{'tansig' 'tansig' 'tansig' 'logsig' 'purelin'}); net.trainparam.epochs=2500; net.trainparam.goal=0.00001; net=train(net,p,t); gensim(net,-1) 产生的神经网络控制器如图4所示:
神经网络控制完整版
神经网络控制 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
人工神经网络控制 摘要: 神经网络控制,即基于神经网络控制或简称神经控制,是指在控制系统中采用神经网络这一工具对难以精确描述的复杂的非线性对象进行建模,或充当控制器,或优化计算,或进行推理,或故障诊断等,亦即同时兼有上述某些功能的适应组合,将这样的系统统称为神经网络的控制系统。本文从人工神经网络,以及控制理论如何与神经网络相结合,详细的论述了神经网络控制的应用以及发展。 关键词: 神经网络控制;控制系统;人工神经网络 人工神经网络的发展过程 神经网络控制是20世纪80年代末期发展起来的自动控制领域的前沿学科之一。它是智能控制的一个新的分支,为解决复杂的非线性、不确定、不确知系统的控制问题开辟了新途径。是(人工)神经网络理论与控制理论相结合的产物,是发展中的学科。它汇集了包括数学、生物学、神经生理学、脑科学、遗传学、人工智能、计算机科学、自动控制等学科的理论、技术、方法及研究成果。 在控制领域,将具有学习能力的控制系统称为学习控制系统,属于智能控制系统。神经控制是有学习能力的,属于学习控制,是智能控制的一个分支。神经控制发展至今,虽仅有十余年的历史,已有了多种控制结构。如神经预测控制、神经逆系统控制等。 生物神经元模型 神经元是大脑处理信息的基本单元,人脑大约含1012个神经元,分成约1000种类型,每个神经元大约与 102~104个其他神经元相连接,形成极为错综复杂而又灵活多变的神经网络。每个神经元虽然都十分简单,但是如此大量的神经元之间、如此复杂的连接却可以演化出丰富多彩的行为方式,同时,如此大量的神经元与外部感受器之间的多种多样的连接方式也蕴含了变化莫测的反应方式。 图1 生物神经元传递信息的过程为多输入、单输出,神经元各组成部分的功能来看,信息的处理与传递主要发生在突触附近,当神经元细胞体通过轴突传到突触前膜的脉
《人工神经网络的发展及其应用》
人工神经网络及其应用 摘要:神经网络是新技术领域中的一个时尚词汇。很多人听过这个词,但很少人真正明白它是什么。本文的目的是介绍关于人工神经网络的基本包括它的背景,发展,发展前景。 关键词:神经网络,发展,背景。 1 人工神经网络产生的背景 自古以来,关于人类智能本源的奥秘,一直吸引着无数哲学家和自然科学家的研究热情。生物学家、神经学家经过长期不懈的努力,通过对人脑的观察和认识,认为人脑的智能活动离不开脑的物质基础,包括它的实体结构和其中所发生的各种生物、化学、电学作用,并因此建立了神经元网络理论和神经系统结构理论,而神经元理论又是此后神经传导理论和大脑功能学说的基础。在这些理论基础之上,科学家们认为,可以从仿制人脑神经系统的结构和功能出发,研究人类智能活动和认识现象。另一方面,19世纪之前,无论是以欧氏几何和微积分为代表的经典数学,还是以牛顿力学为代表的经典物理学,从总体上说,这些经典科学都是线性科学。然而,客观世界是如此的纷繁复杂,非线性情况随处可见,人脑神经系统更是如此。复杂性和非线性是连接在一起的,因此,对非线性科学的研究也是我们认识复杂系统的关键。为了更好地认识客观世界,我们必须对非线性科学进行研究。人工神经网络作为一种非线性的、与大脑智能相似的网络模型,就这样应运而生了。所以,人工神经网络的创立不是偶然的,而是20世纪初科学技术充分发展的产物。 2 人工神经网络的发展 人工神经网络的研究始于40年代初。半个世纪以来,经历了兴起、高潮与萧条、高潮及稳步发展的远为曲折的道路。 1943年,心理学家W.S.Mcculloch和数理逻辑学家W.Pitts 提出了M—P模型,这是第一个用数理语言描述脑的信息处理过程的模型,虽然神经元的功能比较弱,但它为以后的研究工作提供了依据。1949年,心理学家D.O.Hebb提出突触联系可变的假设,根据这一假设提出的学习规律为神经网络的学习算法奠定了基础。1957 年,计算机科学家Rosenblatt 提出了著名的感知机模型,它的模型包含了现代计算机的一些原理,是第一个完整的人工神经网络,第一次把神经网络研究付诸工程实现。由于可应用于模式识别,联想记忆等方面,当时有上百家实验室投入此项研究,美国军方甚至认为神经网络工程应当比“原子弹工程”更重要而给予巨额资助,并在声纳信号识别等领域取得一定成绩。1960年,B.Windrow和E.Hoff提出了自适应线性单元,它可用于自适应滤波、预测和模式识别。至此,人工神经网络的研究工作进入了第一个高潮。 1969年,美国著名人工智能学者M.Minsky和S.Papert编写了影响很大的Perceptron一书,从理论上证明单层感知机的能力有限,诸如不能解决异或问题,而且他们推测多层网络的感知机能力也不过如此,他们的分析恰似一瓢冷水,很多学者感到前途渺茫而纷纷改行,原先参与研究的实验室纷纷退出,在这之后近10年,神经网络研究进入了一个缓慢发展的萧条期。这期间,芬兰学者T.Kohonen 提出了自组织映射理论,反映了大脑神经细胞的自组织特性、记忆方式以及神经细胞兴奋刺激的规律;美国学者S.A.Grossberg的自适应共振理论(ART );日本学者K.Fukushima提出了认知机模型;ShunIchimari则致力于神经网络
神经网络及其控制
第一章 神经网络计算 §1-1神经元模型 一、概述 神经网络的特点 1. 定义:用于模拟人脑神经元活动过程,包括对信息的加工、处理、存贮和搜索过程。 2. 特点 (1) 信息分布式存贮 (2) 信息的并行处理与推理 (3) 信息的自组织、自学习 二、神经元的模型特征 神经元——多输入单输出的信息处理单元 膜电位——细胞内部和外部具有不同的电位,当外部电位为零时,内部电位称为膜电位。 ωi >0 —— 兴奋性神经元的突触 ωi <0 —— 抑制性 ωi =0 —— 第i 个输入信号对该神经元不起任何作用 神经元具有以下特征: 1. 时空整合功能: (1) 空间总和: 定量描述为:整个神经元的膜电位(状态变化)与输入信号与其权重的线性组合: 1 n i i i x ω=∑ 是线性相关的 (2) 时间总和:不同时刻的输入信息对神经元的影响会重叠,加起来,同时起作 用。 (3) 时空整合: 根据空间和时间总和,神经元对不同时刻和不同部位的输入进 行处理,该过程称之为时空整合作用。 定量描述为:设第i 个输入信号t 时间后对膜电位的影响为ωi (t ′(t)),则在t 时刻,神经元膜电位的变化与下式有关: 1 ()()n t i i i t t x t dt ω-∞ =-∑? ’’’ (1—1)
式中 ()i x t ’——第i 个输入在时间t ′时的输入信号 2 阈值特性 神经元的输入输出之间为非线性,如图1—2所示: 图1—2 阈值特性 即: _0y u y u θθ ?? >==?∞时,无论输入信号多强大,也不会有输出信号。 4. 突触结合的可塑性:即权重ωi 是实时变化的。 二、 神经模型