高分辨率遥感影像中建筑物3D信息的提取
基于Barista 软件的高分辨率遥感影像中建筑物3D 信息的提取*
张培峰1,2
胡远满
1**
贺红士
1,3
(1中国科学院沈阳应用生态研究所,沈阳110016;2
中国科学院研究生院,北京100049;
3
密苏里大学自然资源学院,美国
哥伦比亚65211)
摘 要 城市建筑物空间信息的获取对城市规划二环境保护等社会各行业越来越重要,高分辨率商业卫星的出现为提取建筑物3D 信息提供了可能性.本文基于Barista 软件,利用Quick?Bird 数据提取了建筑物的3D 信息并进行了精度验证.结果表明:基于Barista 软件从高分辨率卫星影像中提取建筑物3D 信息,具有专业水平要求低二普适性强二操作简单二精度高等优点;当数字高程模型(DEM )和传感器定位模型精度较高二影像偏天底角较理想时,3D 信息提取的水平定位精度和高度测量精度可达到1个像素水平.关键词 Barista 软件 高分辨率遥感影像 3D 信息提取
文章编号 1001-9332(2010)05-1190-06 中图分类号 Q149;TP75 文献标识码 A Extraction of buildings three?dimensional information from high?resolution satellite imagery based on Barista software.ZHANG Pei?feng 1,2,HU Yuan?man 1,HE Hong?shi 1,3(1Institute of Applied Ecology ,Chinese Academy of Sciences ,Shenyang 110016,China ;2Graduate University of Chinese Academy of Sciences ,Beijing 100049,China ;3School of Natural Resources University of Missouri ,Columbia 65211,USA ).?Chin.J.Appl.Ecol .,2010,21(5):1190-1195.
Abstract :The demand for accurate and up?to?date spatial information of urban buildings is becom?ing more and more important for urban planning,environmental protection,and other vocations.Today’s commercial high?resolution satellite imagery offers the potential to extract the three?dimen?sional information of urban buildings.This paper extracted the three?dimensional information of ur?ban buildings from QuickBird imagery,and validated the precision of the extraction based on Baris?ta software.It was shown that the extraction of three?dimensional information of the buildings from high?resolution satellite imagery based on Barista software had the advantages of low professional level demand,powerful universality,simple operation,and high precision.One pixel level of point positioning and height determination accuracy could be achieved if the digital elevation model (DEM)and sensor orientation model had higher precision and the off?Nadir View Angle was rela?tively perfect.
Key words :Barista software;high?resolution satellite imagery;three?dimensional information ex?traction.
*中国科学院沈阳应用生态研究所知识创新工程项目(06LYQY1001)资助.
**通讯作者.E?mail:Huym@https://www.360docs.net/doc/4413728168.html, 2009?11?18收稿,2010?03?06接受.
城市3D 信息广泛应用于制图二城市规划与设计二城市污染控制二环境保护与建设二通信二交通二能源与财产管理二旅游二城市可视化二城市进程监测以及城市现代化管理[1-2],在城市噪声扩散二空气污染
分析和房地产税收评估等方面也具有一定的应用潜力[3].建筑物3D 信息的获取对城市规划者二地理学者二建筑设计者等非常重要.高分辨率卫星影像(high?resolution satellite imagery,HRSI)的出现使制图及建筑物3D 信息提取成为可能[4-5],从高分辨率影像中获取建筑物3D 信息已得到广泛应用.
目前,空间3D 信息的获取方法主要有航空摄
影测量二卫星遥测以及机载激光扫描(light detection
and ranging,LiDAR)三大类[6].Ameri 等[7]应用平面屋顶结构自动提取了建筑物的3D 结构,从简单的
应用生态学报 2010年5月 第21卷 第5期 Chinese Journal of Applied Ecology,May 2010,21(5):1190-1195
图像区域到复杂的实物几何特征自下而上建立粗略的建筑物虚拟框架,再自上而下将虚拟的建筑物模型投影到影像上.Rottensteiner等[8]从雷达传感器影像的点云中提取3D信息,将影像中雷达点从建筑物点和其他事物点中区分出来,利用偏正态分布的强力插值计算出数字地面模型,通过分析点与雷达初始点以及数字地面模型高度的差别,从其他非地面点分离出建筑物点,利用曲率分割技术建立了建筑物3D模型.Suveg等[9]将立体像对影像与2D地图信息以及基于自建知识库系统三者结合起来,从影像中自动提取建筑物3D信息.此外,基于IKO?
NOS二SPOT等高分辨率影像,利用太阳二卫星二图像阴影与建筑物高度的几何关系,通过测量建筑物的阴影[10-12]以及采用面向对象的 自下而上”的多尺度分割方法与掩膜操作相结合[13]提取建筑物3D信息也有广泛应用.上述3D数据获取方法各有优点,又各有局限性,如航空摄影测量和卫星遥感获取的主要是建筑物顶面及其轮廓的信息;机载激光扫描技术通过多次回波探测虽然可同时获得地面和地表的高程信息,但也存在对二维特征表现较差的缺点.目前自动和半自动化3D信息的提取存在专业水平要求高二操作复杂二精度偏低等不足.Barista软件是2001年10月由墨尔本大学测绘学院与空间信息合作研究中心[5]共同开发,主要应用于高分辨率商业遥感影像空间信息提取的摄影测量软件[14],软件中嵌入了推扫式成像传感器的通用传感器模型[15]二光束平差法(修正传感器定位模型RPC与Affine的系统误差)及有理函数模型(RFM)解算精度评价方法,该软件有影像的融合二校正二增强二拼接[16-17]二特征地物的自动提取与分类二投影和坐标的相互转换等功能,其中主要功能是空间3D信息提取[18-19].本文对Barista软件应用于高分辨率影像3D信息提取的原理进行了分析,旨在为高分辨率遥感影像应用于城市规划二城市景观变化二城市扩张等研究提供新的思路与方法.
1 研究方法
1.1 Barista提取3D信息的前提条件Barista软件主要应用Monoplotting测量工具进行3D信息的提取,Monoplotting是一种基于数字高程模型(digital elevation model,DEM)从航空影像中提取3D空间信息的摄影测量技术[5].在3D信息的提取中,数据主要是研究区的DEM二卫星影像及相应的传感器定位模型.
Monoplotting包括3D点二线二建筑物及高度的测量,对于3D点二线和高度的测量只需要DEM二影像及其传感器定位模型等数据源即可完成.建筑物3D 信息的提取,除了具备3D点二线和高度的测量条件外,影像上的建筑物至少有一个地面点需可见,可测量,且所有屋顶点均需可见,可测量[5].
1.2 传感器模型及其误差校正原理
传感器定位模型用来表示图像点二维坐标与其物方空间三维坐标之间的转化关系[5].传感器模型主要分为严格物理传感器模型和通用传感器模型[20].对于高分辨率影像而言,为了成像技术的保密,影像商家不提供任何关于传感器内方位参数信息,只提供通用传感器模型,即有理多项式系数(RPC)二仿射变换二多项式二直接线性变换等成像模型.随着RPCs从卫星参数中获取后,有理函数模型可与严格物理传感器模型达到同样的定位精度,使有理函数模型广泛应用于遥感领域[21].
然而,卫星影像在成像的过程中,受到透视投影二摄影轴倾斜二大气折光二地形起伏等因素影响,使影像中像点产生不同程度的几何变形而失真.因此,需要修正传感器定位模型的误差,以提高信息提取精度.
RPC模型可表示为图像点行列坐标(l n,s n)的标准化值与地面经度二纬度二高程(U,V,W)坐标标准化值的三次多项式[22]:
l=l n l s+l0
s=s n s s+s0
U=(φ-φ0)/φs
V=(λ-λ0)/λs
W=(h-h0)/h s
l n=Num l
(U,V,W)
Den l(U,V,W)
s n=Num s
(U,V,W)
Den s(U,V,W)
Num l(U,V,W)=a1+a2V+a3U+a4W+a5UV +a6VW+a7UW+a8V2+a9U2+a10W2+a11UVW+ a12V3+a13VU2+a14VW2+a15V2U+a16U3+a17UW2 +a18V2W+a19U2W+a20W3
Num s(U,V,W)=b1+b2V+b3U+b4W+b5UV+ b6VW+b7UW+b8V2+b9U2+b10W2+b11UVW+b12V3 +b13VU2+b14VW2+b15V2U+b16U3+b17UW2+ b18V2W+b19U2W+b20W3
Den l(U,V,W)=c1+c2V+c3U+c4W+c5UV+ c6VW+c7UW+c8V2+c9U2+c10W2+c11UVW+c12V3
1911
5期 张培峰等:基于Barista软件的高分辨率遥感影像中建筑物3D信息的提取
+c 13VU 2+c 14VW 2+c 15V 2U +c 16U 3+c 17UW 2+c 18V 2W +c 19U 2W +c 20W 3
Den s (U ,V ,W )=d 1+d 2V +d 3U +d 4W +d 5UV +
d 6VW +d 7UW +d 8V 2+d 9U 2+d 10W 2+d 11UVW +d 12V 3+d 13VU 2+d 14VW 2+d 15V 2U +d 16U 3+d 17UW 2+d 18V 2W +d 19U 2W +d 20W 3
式中:l 二s 分别为图像上点的行列坐标;l s 二l 0分别为行比例尺和行偏移量;s s 二s 0分别为列比例尺和列偏移量;φ二λ二h 分别为经度二纬度和高程;φs 二λs 二h s 和φ0二λ0二h 0分别为经二纬度和高程的比例尺和偏移量;Num l 二Den l 二Num s 和Den s 分别为地面点三维坐标关于图像点二维行列坐标的三次函数表达式.通过上述公式可计算RPC 模型的80个系数a i 二b i 二c i 和d i [22].
RPC 模型是严格物理传感器模型的再参数化,
模型生成时将外方位元素的系统误差转换为RPC
的内在定位误差[23],为提高RPC 模型的定位精度,需要对传感器模型的系统误差进行修正.对RPC 模型误差的校正方法包括直接改正法和间接改正法,
直接改正法指不改动RPC 定位模型本身,而是选用不同的数学计算模型和步骤,直接作用于80个参数,得到一组更新后的RPC 系数;间接改正法指在RPC 成像模型中加入额外的误差改正项,产生基于RPC 的区域网平差.RPC 区域网平差需要的控制点少,RPC 的后处理改正方便,根据补偿对象的不同,RPC 模型的间接改正方法包括像方改正和物方改正两种,像方改正不仅能体现物理成像模型的几何特征,且修正后精度较高,所以,像方改正的应用较广泛.平移补偿二平移与偏移补偿和仿射变换补偿是像方改正的3种方法,其误差补偿公式[22]如下:
l +A 0+A 1l +A 2s =
Num l (UV ,W )
Den l (U ,V ,W )L s
+L 0
S +B 0+B 1l +B 2s =
Num s (U ,V ,W )
Den s (U ,V ,W )S s
+S 0
式中:A 0二A 1二A 2二B 0二B 1二B 2为仿射补偿参数;A 0二A 1二B 0二B 1为平移与漂移补偿参数;A 0二B 0为平移补偿参数.
1.3 3D 信息提取原理
Barista 软件中3D 信息的提取包括点二线二建筑
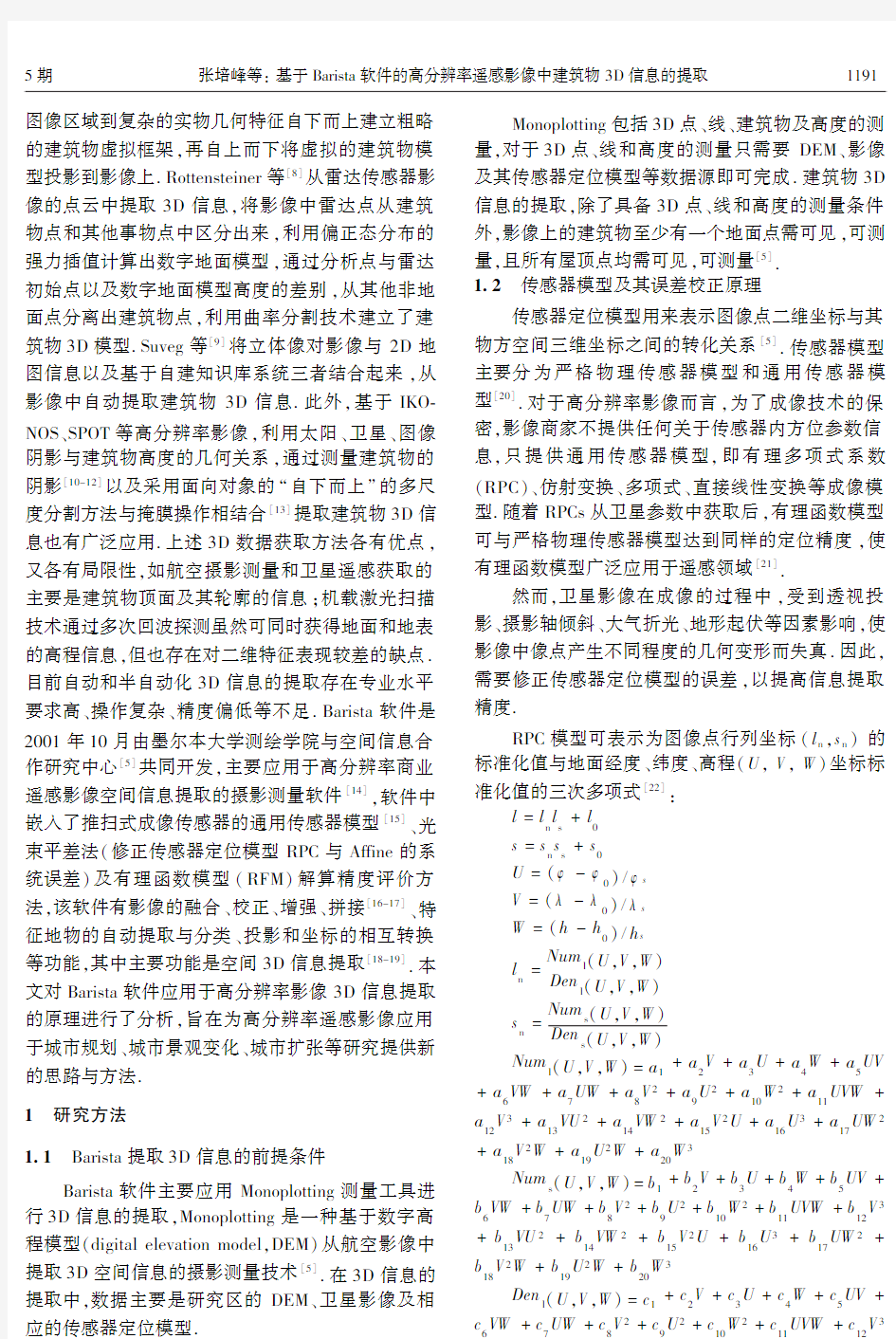
物的三维测量以及对建筑物高度的测量.在3D 点和线的测量中,3D 点的平面位置和高度值分别通过最小二乘迭代法估算和DEM 插值得到,3D 线的测量原理与点相同,测量2个及2个以上连续的点就可以得到线状地物.3D 点的平面位置的初始高程值为数字高程模型(digital elevation model,DEM)高程
最大与最小的平均值,从该初始点开始,新的高程值通过DEM 插值得到,当该点的高程值小于一定的收敛极限时,迭代插值过程完成了对新高程值的确定.在三维点测量中,点的迭代插值过程见图1[5]. 建筑物高度测量过程中假设水平位置高度相同,先测量建筑物拐角地面上一点,再测量垂直于该点的建筑物的屋顶点,应用最小二乘法计算出建筑物高度(图2),函数表达式为:
(l ,s )=F (X ,Y ,Z )
式中:F 为在测量过程中使用的传感器定位模型;(l ,s )为建筑物屋顶的二维坐标值;(X ,Y )为地面点的坐标;Z 为建筑物高度.
基于高度测量完成建筑物3D 信息的提取.在测量建筑物高度的基础上分别量测建筑物所有屋顶点,对于顶部复杂的建筑物,在测量中假设建筑物的屋顶各点位于同一个高度,与每个建筑物屋顶测量点对应的地面点通过DEM 自动插值获得,从而得到建筑物的3D 信息
.
图1 基于DEM 的3D 点测量
Fig.1 3D point measurement based on DEM.
(l ,s )为影像上点的二维坐标值(l ,s )represented planar coordinate value in image;(X ,Y ,Z )为相应地面点的三维坐标值(X ,Y ,Z )re?presented three?dimensional coordinate value on the ground accordingly.下同The same
below.
图2 基于DEM 的建筑物高度测量
Fig.2 Measurement of building height based on DEM.
θ为影像的偏天底角θrepresented off?nadir angle of image;σpixel 为影像上的点测量误差(像素)σpixel represented measurement error of points in image (pixel);σΔh 为对应于影像上点测量误差引起的高程误差σΔh 为represented vertical error caused by measurement error;ΔH 为地面点高程值与屋顶点测量高程值的差值ΔH represented ele?vation difference between roof point and ground point.
2911 应 用 生 态 学 报 21卷
1.4 数据源
在应用Barista软件提取建筑物3D信息的实例研究中,数据源为沈阳市铁西区2008年10月27号
QuickBird假彩色影像,偏天底角(θ)为13.7°,传感器模型为RPB,DEM为1∶1万,研究区面积39.48 km2.
实例中的影像质量达到了利用Barista软件进行3D信息提取的要求,建筑物拐角至少有一个地面点可见可测量,该建筑物所有屋顶点均可见可测量(图3).
为了提高建筑物三维信息提取的精度,在Bar?ista软件中通过Bundle Adjustment菜单对卫星商家提供的RPB模型误差进行修正.Hanley等[24]实践证明:用Bundle Adjustment方法对RPB模型误差进行修正时,只需一个高精度的地面控制点(GCP)就可获得亚像素水平的定位精度.本文用GPS外测了21个高精度GCP,其中2个控制点为地物圆盘中心,定位精度较高,为误差修正过程中的控制点(GCP),其余19个控制点为道路的交叉点,可作为误差修正的检测点(GKP).
2 结果与分析
2.1 基于Barista软件的建筑物3D信息提取
通过RPC模型将21个地面控制点转为图像的二维坐标,并量测与各地面控制点所对应的图像坐标点.运行软件的Bundle Adjustments菜单,调整地面控制点和图像测量点的sigma值,选择平移补偿参数作为RPC误差修正的参数(平移补偿参数用最少的地面控制点就可以达到1个像素的定位精度).误差修正的结果表明,图像点均方差为0.
025,
图3 影像质量示意图
Fig.3 Sketch map of quality of satellite imagery.经度二纬度和高度的监测点均方差分别为0.539二0.849和0.187,说明用较少的地面控制点即可对RPC模型进行误差修正,且修正后的模型在3D信息提取中能达到亚米级的定位精度[24].基于修正后RPC模型的影像上道路的提取结果表明,道路的3D 线可以是开放曲线也可以是闭合曲线,每条道路线除具有2D线的特点外,还记录了相应的高程值(图4).基于修正后RPC模型的影像上3D建筑物的提取结果表明,提取的建筑物显示了建筑物的真实性状,并记录了建筑物的高度信息(图5).
2.2 测量精度分析Monoplotting对建筑物高度测量的精度取决于DEM的精度二传感器定位模型(RPC)的精度二图像量测的精度及影像的偏天底角(θ).在DEM的精度二传感器定位模型的精度一定以及图像测量为1个像素精度时,高度测量误差(Δh)与θ的关系为
:
图4 基于Barista的线提取
Fig.4 Extraction of lines based on
Barista.
图5 基于Barista的3D建筑物提取
Fig.5 Extraction of3D buildings based on Barista.
3911
5期 张培峰等:基于Barista软件的高分辨率遥感影像中建筑物3D信息的提取
Δh=cotθpixels
式中:pixel为图像的测量精度(像素).
实例研究中θ引起的高度测量误差(Δh)为0.012个像素.在DEM二传感器定位模型和图像量测精度一定条件下,随着卫星影像成像过程中偏天底角的增大,高度测量误差逐渐减小.此外,DEM精度二传感器定位模型精度二测量过程中产生的误差及建筑物地面点与屋顶点的错误识辨都会对建筑物的高度产生影响[25].
实例研究表明,当有高精度的DEM二传感器定位模型及理想的影像偏天底角时,基于Barista软件从高分辨率卫星影像(IKONOS,QUICKBIRE等)中提取建筑物3D信息的水平定位精度(0.539<1, 0.849<1)和高度测量精度(0.187<1)都可以达到1个像素.
3 结 语
在Barista软件中,要提高建筑物3D信息提取的精度,关键在于采用高精度的GPS外测地面控制点对传感器定位模型(RPC)做误差修正.模型的误差修正可以直接通过软件中的Bundle Adjustment菜单来实现.
与自动与半自动化3D信息提取方法相比,Bar?ista软件提取3D信息的优点在于:专业水平要求低,精度高,操作简单,普适性更强,是自动化与半自动化3D信息提取的有力补充.随着摄影测量技术的迅速发展,未来Barista将成为建筑物3D信息提取的主要工具,也将为城市规划二城市景观变化二城市扩张等研究提供新的思路与方法.但是,目前基于Barista提取3D信息也存在一些不足,如对卫星影像的质量要求较高二信息提取过程中费时费力二仅适于小尺度范围的信息提取等,还有待深入探讨.
参考文献
[1] Suveg I,Vosselman G.Reconstruction of3D building
models from aerial images and maps.ISPRS Journal of
Photogrammetry and Remote Sensing,2004,58:202-
224
[2] Meng Y(蒙 印).Building height extration from sin?
gle imagery.Second Session of the Ninth Plenary Coun?
cil Meeting and Acadimic Annual Meeting of Chinese
Society for Geodesy Photogrammetry and Cartography,
Shenzhen,2006:504-510(in Chinese) [3]Vosselman G,Dijkman S.3D building model recon?
struction from point clouds and ground plans.Interna?
tional Archives of Photogrammetry,Remote Sensing and
Spatial Information Sciences,2001,34:37-44 [4] Baltsavias E,Mason S,Stallmann https://www.360docs.net/doc/4413728168.html,e of DTMs/
DSMs and orthoimages to support building extraction.
Workshop on Automatic Extraction of Man?made Objects
from Aerial and Space Images,Switzerland,1995:199
-210
[5] Willneff J,Poon J,Fraser C.Single?image high?resolu?
tion satellite data for3D information extraction.Interna?
tional Archives of the Photogrammetry,Remote Sensing
and Spatial Information Sciences,2005,36:1-6 [6] Zhang X?F(张小飞),Wang Y?L(王仰麟),Li Z?G
(李正国),et al.Preliminary theory of three?dimen?
sional urban landscape ecology.Acta Ecologica Sinica
(生态学报),2007,27(7):2972-2982(in Chinese) [7] Ameri B,Fritsch D.Automatic3D building reconstruc?
tion using plane?roof structures.Proceeding of American
Society for Photogrammetry and Remote Sensing Annual
Conference,Washington DC,2000:1-12 [8] Rottensteiner F,Briese C.A new method for building
extraction in urban areas from high?resolution Lidar da?
ta.International Archives of Photogrammetry,Remote
Sensing and Spatial Information Sciences,2002,34:
295-301
[9] Suveg I,Vosselman G.Automatic3D building recon?
struction.Proceeding of International Society for Optical
Engineering,San Jose,California,2002:59-69 [10] Xie J?F(谢军飞),Li Y?M(李延明).The extractinon
of building distribution information of different heights in
a city from the shadows in a Ikonos image.Remote Sens?
ing for Land&Resources(国土资源遥感),2004(4):
4-6(in Chinese)
[11] He G?J(何国金),Chen G(陈 刚),He X?Y(何晓
云),et al.Extracting buildings distribution information
of different heights in a city from the shadows in a pan?
chromatic spot image.Journal of Image and Graphics
(中国图象图形学报),2001,6(5):425-428(in
Chinese)
[12] Song X?Y(宋晓宇),Shan X?J(单新建).Preliminary
application of high?resolution satellite image in city
building classification.Remote Sensing Information(遥
感信息),2002(1):27-31(in Chinese) [13] Qiao C(乔 程),Luo J?C(骆剑承),Wu Q?Y(吴
泉源),et al.Object?oriented method based urban
building extraction from high?resolution remote sensing
image.Geography and Geo?Information Science(地理
与地理信息科学),2008,24(5):36-39(in Chi?
nese)
[14] Fraser C,Rottensteiner F,Willneff J,et al.Barista Us?
er Manual[EB/OL].(2008?05?05)[2009?03?21].
4911 应 用 生 态 学 报 21卷
https://www.360docs.net/doc/4413728168.html,.au
[15] Fraser CS,Rottensteiner F,Weser T,et al.Application
of a generic sensor orientation model to Spot5,Quick?
bird and Alos https://www.360docs.net/doc/4413728168.html, Conference and Remote
Sensing,Kuala Lumpur,2007:1-7 [16]Rottensteiner F,Weser T,Fraser CS.Georeferencing
and orthoimage generation from long strips of Alos Im?
agery.Advanced Land Observing Satellite2008Sympo?
sium,Rhodes,Greece,2008:1-7
[17] Fraser CS,Weser T,Rottensteiner F.Image Merging to
Support Georeferencing and Orthoimage Generation from
Alos Imagery[EB/OL].(2008?12?08)[2009?03?
21].https://www.360docs.net/doc/4413728168.html,/scholar?q=Image+
merging+to+support+georeferencing+and+orthoimage+
&hl=zh?CN&btnG=%E6%90%9C%E7%B4%A2&lr
=lang_en
[18]Barista.Barista Product Information Webpage[EB/
OL].(2008?05?05)[2009?03?21].http://www.bar?
https://www.360docs.net/doc/4413728168.html,.au
[19] Willneff J,Poon J.Georeferencing from Orthorectified
and Non?orthorectified High?resolution Satellite Imagery
[EB/OL].(2006?11?08)[2009?03?21].http://
https://www.360docs.net/doc/4413728168.html,/search?hl=zh?CN&source=hp&q=
Georeferencing+from+orthorectified+and+non?orthorecti?
fied+high?resolution+satellite+imagery&btnG=Google
+%E6%90%9C%E7%B4%A2
[20] Zhang Y?S(张永生),Liu J(刘 军).The positio?
ning algorithm based on RPC model and its optimizing of
stereoimages from high?resolution remote sensing satel?
lites.Engineering of Surveying and Mapping(测绘工
程),2004,13(1):1-4(in Chinese) [21] Wu W?Y(巫婉瑜).RFM?based Block Adjustment for
Satellite Images with Weakly Convergent Geometry.
Master Thesis.Taibei:Civil Engineering Institute,
2008(in Chinese)
[22] Fraser CS,Dial G,Grodecki J.Sensor orientation via
RPCs.ISPRS Journal of Photogrammetry and Remote
Sensing,2006,60:182-194
[23] Zhan Y(展 昀).Geropositionning Accuracy Analysis
of Physical Model and RPC Model in QuickBird High?
resolution Imagery.Master Thesis.Shanghai:Tongji
University,2008(in Chinese)
[24] Hanley HB,Fraser CS.Sensor orientation for high?reso?
lution satellite imagery further insights into bias?compen?
sated RPCs.International Archives of the Photogramme?
try,Remote Sensing and Spatial Information Sciences,
2004,35:24-29
[25]Croitoru A,Hu Y,Tao V,et al.Single and stereo
based3D metrology from high?resolution imagery:Meth?
odologies and accuracies.International Archives of Pho?
togrammetry and Remote Sensing,2004,20:12-23
作者简介 张培峰,女,1983年生,博士研究生.主要从事城市景观生态研究,发表论文6篇.E?mail:windzpf@https://www.360docs.net/doc/4413728168.html, 责任编辑 杨 弘
5911
5期 张培峰等:基于Barista软件的高分辨率遥感影像中建筑物3D信息的提取
常见国产卫星遥感影像数据的简介
北京揽宇方圆信息技术有限公司 常见国产卫星遥感影像数据的简介 本文介绍了常见国产卫星数据的简介、数据时间、传感器类型、分辨率等情况。 中国资源卫星应用中心产品级别说明 ◆1A级和1C级产品均为相对辐射校正产品,只是不同卫星选用的生产参数不同。 ◆2级,2A级和2C级产品均为系统几何校正产品,只是不同卫星选用的生产参数不同。 其中: ■GF-1卫星和ZY3卫星归档产品为1A级,ZY1-02C卫星数据归档产品级别为1C级,其他卫星归档级别为2级! ◆归档产品是指:该类产品已经存在于系统中,仅需要从存储系统中迁移出来.即可供用户下载的数据。 ◆生产产品是指:该类产品不是已经存在的产品,需要对原始数据产品进行生产,然后再提供给用户下载的数据。
■当用户需要的产品级别是上述归档的级别,直接选择相应的产品级别,然后查询即可! ■当用户需要的产品级别不是上述归档的级别,就需要进行生产.本系统提供GF-1卫星和ZY3卫星2A级的生产产品,ZY1-02C卫星2C级的生产产品,在选择需要的级别查询后,无论有没有数据,在查询结果页上方有一个“查询0级景”按钮,点击此按钮后,进行数据查询,如果有数据,选择需要的产品直接订购,即可选择需要的产品级别。 国产卫星 一、GF-3(高分3号) 1.简介 2016年8月10日6时55分,高分三号卫星在太原卫星发射中心用长征四号丙运载火箭成功发射升空。 高分三号卫星是中国高分专项工程的一颗遥感卫星,为1米分辨率雷达遥感卫星,也是中国首颗分辨率达到1米的C频段多极化合成孔径雷达(SAR)成像卫星,由中国航天科技集团公司研制。 2.数据时间 2016年8月10日-现在 3.传感器 SAR:1米 二、ZY3-02(资源三号02星) 1.简介 资源三号02星(ZY3-02)于2016年5月30日11时17分,在我国在太原卫星发射中心用长征四号乙运载火箭成功将资源三号02星发射升空。这将是我国首次实现自主民用立体测绘双星组网运行,形成业务观测星座,
遥感影像的分类处理
摘要 在面向对象的影像分类方法中,首先需要将遥感影像分割成有意义的影像对象集合,进而在影像对象的基础上进行特征提取和分类。本文针对面向对象影像分类思想的关键环节展开讨论和研究,(1) 采用基于改进分水岭变换的多尺度分割算法对高分辨率遥感影像进行分割。构建了基于高斯尺度金字塔的多尺度视觉单词,并且通过实验证明其表达能力优于经典的词包表示。最后,在词包表示的基础上,利用概率潜在语义分析方法对同义词和多义词较强的鉴别能力对影像对象进行分析,找出其最可能属于的主题或类别,进而完成影像的分类。 近些年来,随着航空航天平台与传感器技术的高速发展,获取的遥感影像的分辨率越来越高。高分辨率遥感影像在各行业部门的应用也越来越广泛,除了传统的国土资源、地质调查和测绘测量等部门,还涉及到城市规划、交通旅游和环境生态等领域,极大地拓展了遥感影像的应用范围。因此,对高分辨率遥感影像的处理分析成为备受关注的领域之一。高分辨率遥感影像包括以下三种形式:高空间分辨率(获取影像的空间分辨率从以前的几十米提高到1 至5 米,甚至更高);高光谱分辨率(电磁波谱被不断细分,获取遥感数据的波段数从几十个到数百个);高时间分辨率(遥感卫星的回访周期不断缩短,在部分区域甚至可以连续观测)。本文所要研究的高分辨率遥感影像均是指“高空间分辨率”影像。 相对于中低分辨率的遥感数据,高空间分辨率遥感影像具有更加丰富的空间结构、几何纹理及拓扑关系等信息,对认知地物目标的属性特征更加方便,如光谱、形状、纹理、结构和层次等。另外,高分辨率遥感影像有效减弱了混合像元的影响,并且能够在较小的空间尺度下反映地物特征的细节变化,为实现更高精度的地物识别和分类提供了可能。 然而,传统的遥感影像分析方法主要基于“像元”进行,它处于图像工程中的“图像处理”阶段(见图1-1),已然不能满足当今遥感数据发展的需求。基于“像元”的高分辨率遥感影像分类更多地依赖光谱特征,而忽视影像的纹理、形状、上下文和结构等重要的空间特征,因此,分类结果会产生很严重的“椒盐(salt and pepper)现象”,从而影响到分类的精度。虽然国内外的很多研究人员针对以上缺陷提出了很多新的方法,如支持向量机(Support Vector Machine,SVM) 、纹理聚类、分层聚类(Hierarchical Clustering) 、神经网络(Neural Network, NN)等,但仅依靠光谱特征的基于像元的方法很难取得更好的分类结果。基于“像元”的传统分类方法还有着另一个局限:无法很好的描述和应用地物目标的尺度特征,而多尺度特征正是遥感信息的基本属性之一。由于在不同的空间尺度上,同样的地表空间格局与过程会表现出明显的差异,因此,在单一尺度下对遥感影像进行分析和识别是不全面的。为了得到更好的分类结果,需要充分考虑多尺度特征。 针对以上问题,面向对象的处理方法应运而生,并且逐渐成为高空间分辨率遥感影像分析和识别的新途径。所谓“面向对象”,即影像分析的最小单元不再是传统的单个像元,而是由特定像元组成的有意义的同质区域,也即“对象”;因此,在对影像分析和识别的过程
遥感信息智能化提取方法
遥感信息智能化提取方法 目前,大部分遥感信息的分类和提取,主要是利用数理统计与人工解译相结合的方法。这种方法不仅精度相对较低,效率不高,劳动强度大,而且依赖参与解译分析的人,在很大程度上不具备重复性。尤其对多时相、多传感器、多平台、多光谱波段遥感数据的复合处理,问题更为突出。在遥感影像相互校正方面,一些商业化的遥感图像处理软件,虽然提供了简单的影像相互校正和融合功能,但均是基于纯交互式的人工识别选取同名点,不仅效率非常低,而且精度也难于达到实用要求。因此,研究遥感信息的智能化提取方法对于提高遥感信息的提取精度和效率具有重要意义。 1.遥感图像分类 遥感图像分类是遥感图像处理系统的核心功能之一,它实现了基于遥感数据的地理信息提取,主要包括监督分类,非监督分类,以及分类后的处理功能。非监督分类包括等混合距离法分类(Isodata)等。监督分类包括最小距离(Minimum Distance)分类、最大似然(Maximum Likehood)分类、贝叶斯(Bayesian)分类、以及波谱角分类、二进制编码分类、AIRSAR散射机理分类等。 自动分类是计算机图像处理的初期便涉及的问题。但作为专题信息提取的一种方法,则有其完全不同的意义,是从应用的角度赋予其新的内容和方法。传统的遥感自动分类,主要依赖地物的光谱特性,采用数理统计的方法,基于单个像元进行,如监督分类和非监督分类方法,对于早期的MSS这样较低分辨率的遥感图像在分类中较为有效。后来人们在信息提取中引入了空间信息,直接从图像上提取各种空间特征,如纹理、形状特征等。其次是各种数学方法的引进,典型的有模糊聚类方法、神经网络方法及小波和分形。 近年来对于神经网络分类方法的研究相当活跃。它区别于传统的分类方法在于:在处理模式分类问题时,并不基于某个假定的概率分布,在无监督分类中,从特征空间到模式空间的映射是通过网络自组织完成的,在监督分类中,网络通过对训练样本的学习,获得权值,形成分类器,且具备容错性。人工神经网络 (ANN) 分类方法一般可获得更高精度的分类结果,因此 ANN方法在遥感分类中被广泛应用,特别是对于复杂类型的地物类型分类,ANN 方法显示了其优越性。如 Howald(1989)、McClellad(1989)、 Hepner(1990)、T.Yosh ida(1994)、K.S.Chen(1995)、J.D.Paola(1997) 等利用 ANN 分类方法对 TM 图像进行土地覆盖分类,在不同程度上提高了分类精度;Kanellopoulos(1992) 利用 ANN方法对 SPOT 影像进行了多达20类的分类,取得比统计方法更精确的结果;G.M.Foody(1996)用ANN对混合像元现象进行了分解;L.Bruzzone 等 (1997) 在 TM-5 遥感数据、空间结构信息数据、辅助数据(包括高程、坡度等)等空间数据基础下,用 ANN 方法对复杂土地利用进行了分类,比最大似然分类法提高了 9% 的精度。与统计分类方法相比较,ANN 方法具有更强的非线性映射能力,因此,能处理和分析复杂空间分布的遥感信息。2.基于知识发现的遥感信息提取
高分辨率遥感卫星介绍
北京揽宇方圆信息技术有限公司 高分辨率遥感卫星有哪些 高分辨率遥感可以以米级甚至亚米级空间分辨率精细观测地球,所获取的高空间分辨率遥感影像可以清楚地表达地物目标的空间结构与表层纹理特征,分辨出地物内部更为精细的组成,地物边缘信息也更加清晰,为有效的地学解译分析提供了条件和基础。随着高分辨率遥感影像资源日益丰富,高分辨率遥感在测绘制图、城市规划、交通、水利、农业、林业、环境资源监测等领域得到了飞速发展。 北京揽宇方圆信息技术有限公司是国内的领先遥感卫星数据机构,而且是整合全球的遥感卫星数据资源,分发不同性能、技术应用上可以互补的多种卫星影像,包括光学、雷达卫星影像、历史遥感影像等各种卫星数据服务,各种专业应用目的的图像处理、解译、顾问服务以及基于卫星影像的各种解决方案等。遥感卫星影像数据贯穿中国1960年至今的所有卫星影像数据,是中国遥感卫星数据资源最多的专业遥感卫星数据服务机构,提供多尺度、多分辨率、全覆盖的遥感卫星影像数据服务,最大限度的保证了遥感影像数据获取的及时性和完整性。 一、卫星类型 (1)光学卫星:worldview1、worldview2、worldview3、worldview4、quickbird、geoeye、ikonos、pleiades、deimos、spot1、kompsat系例、spot2、spot3、spot4、spot5、spot6、spot7、landsat5(tm)、Sentinel-卫星、landsat(etm)、rapideye、alos、kompsat系例卫星、planet卫星、北京二号、高景一号、资源三号、高分一号、高分二号、环境卫星。 (2)雷达卫星:terrasar-x、radarsat-2、alos雷达卫星、高分三号卫星、哨兵卫星 (3)侦查卫星:美国锁眼卫星全系例(1960-1980) 二、卫星分辨率 (1)0.3米:worldview3、worldview4 (2)0.4米:worldview3、worldview2、geoeye、kompsat-3A (3)0.5米:worldview3、worldview2、geoeye、worldview1、pleiades
遥感专题讲座——影像信息提取(四、面向对象特征提取)
面向对象的影像分类技术 “同物异谱,同谱异物”会对影像分类产生的影响,加上高分辨率影像的光谱信息不是很丰富,还有经常伴有光谱相互影响的现象,这对基于像素的分类方法提出了一种挑战,面向对象的影像分类技术可以一定程度减少上述影响。 本小节以ENVI中的面向对象的特征提取FX模块为例,对这种技术和处理流程做一个简单的介绍。 本专题包括以下内容: ??●面向对象分类技术概述 ??●ENVI FX简介 ??●ENVI FX操作说明 1、面向对象分类技术概述 面向对象分类技术集合临近像元为对象用来识别感兴趣的光谱要素,充分利用高分辨率的全色和多光谱数据的空间,纹理,和光谱信息来分割和分类的特点,以高精度的分类结果或者矢量输出。它主要分成两部分过程:影像对象构建和对象的分类。
影像对象构建主要用了影像分割技术,常用分割方法包括基于多尺度的、基于灰度的、纹理的、基于知识的及基于分水岭的等分割算法。比较常用的就是多尺度分割算法,这种方法综合遥感图像的光谱特征和形状特征,计算图像中每个波段的光谱异质性与形状异质性的综合特征值,然后根据各个波段所占的权重,计算图像所有波段的加权值,当分割出对象或基元的光谱和形状综合加权值小于某个指定的阈值时,进行重复迭代运算,直到所有分割对象的综合加权值大于指定阈值即完成图像的多尺度分割操作。 影像对象的分类,目前常用的方法是“监督分类”和“基于知识分类”。这里的监督分类和我们常说的监督分类是有区别的,它分类时和样本的对比参数更多,不仅仅是光谱信息,还包括空间、纹理等信息。基于知识分类也是根据影像对象的熟悉来设定规则进行分类。 目前很多遥感软件都具有这个功能,如ENVI的FX扩展模块、易康(现在叫Definiens)、ERDAS的Objective模块、PCI的FeatureObjeX(新收购)等。 表1为三大类分类方法的一个大概的对比。 类型基本原理影像的最小单元适用数据源缺陷 传统基于光谱的分类方 法地物的光谱信息 特征 单个的影像像元 中低分辨率多光谱 和高光谱影像 丰富的空间信息利 用率几乎为零 基于专家知识决策树根据光谱特征、空 间关系和其他上 下文关系归类像 元 单个的影像像元多源数据知识获取比较复杂 面向对象的分类方法几何信息、结构信 息以及光谱信息 一个个影像对象 中高分辨率多光谱 和全色影像 速度比较慢
遥感图像分类方法的国内外研究现状与发展趋势
遥感图像分类方法的国内外研究现状与发展趋势
遥感图像分类方法的研究现状与发展趋势 摘要:遥感在中国已经取得了世界级的成果和发展,被广泛应用于国民经济发展的各个方面,如土地资源调查和管理、农作物估产、地质勘查、海洋环境监测、灾害监测、全球变化研究等,形成了适合中国国情的技术发展和应用推广模式。随着遥感数据获取手段的加强,需要处理的遥感信息量急剧增加。在这种情况下,如何满足应用人员对于大区域遥感资料进行快速处理与分析的要求,正成为遥感信息处理面临的一大难题。这里涉及二个方面,一是遥感图像处理本身技术的开发,二是遥感与地理信息系统的结合,归结起来,最迫切需要解决的问题是如何提高遥感图像分类精度,这是解决大区域资源环境遥感快速调查与制图的关键。 关键词:遥感图像、发展、分类、计算机 一、遥感技术的发展现状 遥感技术正在进入一个能够快速准确地提供多种对地观测海量数据及应用研究的新阶段,它在近一二十年内得到了飞速发展,目前又将达到一个新的高潮。这种发展主要表现在以下4个方面: 1. 多分辨率多遥感平台并存。空间分辨率、时间分辨率及光谱分辨率普遍提高目前,国际上已拥有十几种不同用途的地球观测卫星系统,并拥有全色0.8~5m、多光谱3.3~30m的多种空间分辨率。遥感平台和传感器已从过去的单一型向多样化发展,并能在不同平台
上获得不同空间分辨率、时间分辨率和光谱分辨率的遥感影像。民用遥感影像的空间分辨率达到米级,光谱分辨率达到纳米级,波段数已增加到数十甚至数百个,重复周期达到几天甚至十几个小时。例如,美国的商业卫星ORBVIEW可获取lm空间分辨率的图像,通过任意方向旋转可获得同轨和异轨的高分辨率立体图像;美国EOS卫星上的MOiDIS-N传感器具有35个波段;美国NOAA的一颗卫星每天可对地面同一地区进行两次观测。随着遥感应用领域对高分辨率遥感数据需求的增加及高新技术自身不断的发展,各类遥感分辨率的提高成为普遍发展趋势。 2. 微波遥感、高光谱遥感迅速发展微波遥感技术是近十几年发展起来的具有良好应用前景的主动式探测方法。微波具有穿透性强、不受天气影响的特性,可全天时、全天候工作。微波遥感采用多极化、多波段及多工作模式,形成多级分辨率影像序列,以提供从粗到细的对地观测数据源。成像雷达、激光雷达等的发展,越来越引起人们的关注。例如,美国实施的航天飞机雷达地形测绘计划即采用雷达干涉测量技术,在一架航天飞机上安装了两个雷达天线,对同一地区一次获取两幅图像,然后通过影像精匹配、相位差解算、高程计算等步骤得到被观测地区的高程数据。高光谱遥感的出现和发展是遥感技术的一场革命。它使本来在宽波段遥感中不可探测的物质,在高光谱遥感中能被探测。高光谱遥感的发展,从研制第一代航空成像光谱仪算起已有二十多年的历史,并受到世界各国遥感科学家的普遍关注。但长期以来,高光谱遥感一直处在以航空为基础的研究发展阶段,且主要
高分辨率遥感影像数据一体化测图系统PixelGrid
高分辨率遥感影像数据一体化测图系统PixelGrid 北京四维空间数码科技有限公司 一、概况介绍 高分辨率遥感影像数据一体化测图系统PixelGrid(以下简称“PixelGrid”)是由中国测绘科学研究院自主研发的“十一五”重大科技成果,获得2009年度国家测绘科技进步一等奖。 为将这一重大科技成果实现产业化,2008年开始,由中国测绘科学研究院参股单位北京四维空间数码科技有限公司进行成果转化和产品化,并开展销售。 该软件是我国西部1:5万地形图空白区测图工程以及第二次全国土地调查工程的主力软件, 被誉为国产的“像素工厂”。 PixelGrid以其先进的摄影测量算法、集群分布式并行处理技术、强大的自动化业务化处理能力、高效可靠的作业调度管理方法、友好灵活的用户界面和操作方式,全面实现了对卫星影像数据、航空影像数据以及低空无人机影像数据的快速自动处理,可以完成遥感影像从空中三角测量到各种比例尺的DEM/DSM、DOM等测绘产品的生产任务。 PixelGrid软件主界面。 二、主要特点 PixelGrid系统以现代摄影测量与遥感科学技术理论为基础,融合计算机技术和网络通讯技术,采用基于RFM通用成像模型的大范围遥感影像稀少或无控制区域网平差、基于旋转/缩放不变性特征多影像匹配的高精度航空影像自动空三、基于多基线/多重特征的高精度DEM/DSM自动提取、等高线数据半自动采集及网络分布式编辑、基于地理信息数据库等多源控制信息的高效影像地图制作、基于松散耦合并行服务中间件的集群分布式并行计算等一系列核心关键技术,是中国测绘科学研究院研制的一款类似“像素工厂”(ISTAR PixelFactoryTM)的新一代多源航空航 天遥感数据一体化高效能处理系统。
IKONOS卫星遥感影像解译数据分辨率是多少
IKONOS卫星遥感影像解译数据分辨率是多少? IKONOS卫星简介 IKONOS为美国DigitalGlobe公司的高分辨率遥感卫星,于1999年09月24日发射,其影像分辨率达0.82米,为全球首颗提供1米以下分辨率的商用光学卫星,揭开了高分辨率卫星影像的时代。--广西善图科技。 IKONOS卫星基本参数
IKONOS卫星影像样片 IKONOS卫星影像 IKONOS卫星影像 卫星遥感数据分类: 一、卫星分辨率 1.0.3米:worldview3、worldview4 2.0.4米:worldview3、worldview2、geoeye、kompsat-3A 3.0.5米:worldview3、worldview2、geoeye、worldview1、pleiades、高景一号 4.0.6米:quickbird、锁眼卫星 5.1米:ikonos、高分二号、kompsat、deimos、北京二号 6.1.5米:spot6、spot7、锁眼卫星 7.2.5米:spot5、alos、资源三号、高分一号(4颗)、高分六号、锁眼卫星 8.5米:spot5、rapideye、锁眼卫星、planet卫星4米
9.10米:spot5、spot4、spot3、spot2、spot1、Sentinel-卫星 10.15米:landsat5(tm)、landsat(etm)、landsat8、高分一号16米 二、卫星类型 1.光学卫星:spot2、spot3、spot4、spot5、spot6、spot7、worldview1、worldview2、worldview3、worldview4、quickbird、geoeye、ikonos、pleiades、deimos、spot1、kompsat系例、landsat5(tm)、Sentinel-卫星、landsat(etm)、rapideye、alos、kompsat系例卫星、planet卫星、高分一号、高分二号、高分六号、北京二号、高景一号、资源三号、环境卫星。 2.雷达卫星:terrasar-x、radarsat-2、alos雷达卫星、高分三号卫星、哨兵卫星 3.侦查卫星:美国锁眼卫星全系例(1960-1980) 4.高光谱类卫星:高分五号、环境小卫星、ASTER卫星、EO-1卫星 三、卫星国籍 1.美国:worldview1、worldview2、worldview3、quickbird、geoeye、ikonos、landsat5(tm)、landsat(etm)、锁眼卫星、planet卫星 2.法国:pleiades、spot1、spot2、spot3、spot4、spot5、spot6 3.中国:高分一号、高分二号、高分六号、高景卫星、北京二号、资源三号等 4.德国:terrasar-x、rapideye 5.加拿大:radarsat-2 四、卫星发射年份 1.1960-1980年:锁眼卫星(0.6米分辨率至10米) 2.1980-1990年:landsat5(tm)、spot1 3.1990-2000年:spot2、spot3、spot4、landsat(etm)、ikonos 4.2000-2010年:quickbird、worldview1、worldview2、spot5、rapideye、radarsat-2、alos 5.2010-至今:高分一号、高分二号、高分三、高分四、高分五、高分六号、高分七、spot6、spot7、资源三号、worldview3、worldview4、pleiades、高景卫星、planet卫星
遥感卫星影像数据信息提取.
北京揽宇方圆信息技术有限公司 、 遥感卫星影像数据信息提取 北京揽宇方圆信息技术有限公司中科院企业,卫星影像数据服务全国领先。业务包括遥感数据获取与分发、遥感数据产品深加工与处理。按照遥感卫星数据一星多用、多星组网、多网协同的发展思路,根据观测任务的技术特征和用户需求特征,重点发展光学卫星影像、雷达卫星影像、历史卫星影像三个系列,构建由 26个星座及三类专题卫星组成的遥感卫星系统,逐步形成高、中、低空间分辨率合理配置、多种观测技术优化组合的综合高效全球观测和数据获取能力形成卫星遥感数据全球接收与全球服务能力。 (1光学卫星影像系列。 面向国土资源、环境保护、防灾减灾、水利、农业、林业、统计、地震、测绘、交通、住房城乡建设、卫生等行业以及市场应用对中、高空间分辨率遥感数据的需求,提供 worldview1、worldview2、worldview3、worldview4、quickbird、geoeye、 ikonos、pleiades、spot1、spot2、spot3、spot4、spot5、spot6、spot7、landsat5(tm、 landsat(etm、 rapideye、alos、Kompsat 卫星、北京二号、资源三 号、高分一号、高分二号等高分辨率光学观测星座。围绕行业及市场应用对基础地理信息、土地利用、植被覆盖、矿产开发、精细农业、城镇建设、交通运输、水利设施、生态建设、环境保护、水土保持、灾害评估以及热点区域应急等高精度、高重访观测业务需求,发展极轨高分辨率光学卫星星座,实现全球范围内精细化观测的数据获取能力。像国产的中分辨率光学观测星座。围绕资源调查、环境监测、防灾减灾、碳源碳汇调查、地质调查、水资源管理、农情监测等对大幅宽、快速覆盖和综合观测需求,建设高、低轨道合理配置的中分辨率光学卫星星座,实现全球范围天级快速动态观测以及全国范围小时级观测。
高分辨率遥感影像分类实验报告
高分辨率遥感影像分类实验报告 班级:___________________ 姓名:___________________ 学号:___________________ 指导老师:_______________ 地球科学与环境工程学院 二?一四年六月
目录 1 实验方法——面向对象方法 (1) 2 实验内容 (1) 2.1 影像预处理 (1) 2.1.1 影像数据融合 (1) 2.1.2 影像增强处理 (2) 2.2 创建工程 (2) 2.3 分割处理 (3) 2.4 分类 (4) 2.4.1 水体 (4) 2.4.2 陆地 (5) 2.4.3 植被 (6) 2.4.4 裸土 (7) 2.4.5 建筑物 (8) 2.4.6 道路 (9) 2.4.7 阴影 (10) 2.4.8 总体分类图 (12) 3 结语 (13)
1实验方法——面向对象方法 面向对象方法是一个模拟人类大脑认知的过程,将图像分割为不同均质的对 象,充分利用对象所包含的信息,将知识库转换为规则特征,从而提取影像信息。 因为分析的是对象而不是像元,因此我们可以利用对象丰富的语义信息, 结合各 种地学概念,如面积、距离、光谱、尺度、纹理等进行分析。 面向对象的遥感影像分析方法与传统的面向像元的影像分析方法不同。 首先 需要使用一定方法对遥感影像进行分割, 在提取分割单元(图像分割后所得到的 内部属性相对一致或均质程度较高的图像区域) 的各种特征后,在特征空间中进 行对象识别和标识,从而最终完成信息的分类与提取。 2实验内容及详细过程 2.1影像预处理 2.1.1影像数据融合 实验数据为QuickBird 影像,包括4个多光谱波段以及一个全色波段。 QuickBird 影像星下点分辨率:全色为 0.61m ,多光谱为2.44m 。对于面向对象 影像分类 来说,越高的高空间分辨率越好,但在对对象进行分类时,光谱信息同 样重要,因此,可将高分辨率的全色影像和多光谱影像进行数据融合。 使用 ERDAS 进行数据融合: Interprete u spatialenchancemen ^resolution mergeo 图1 全色影像与多光谱影像融合 Ib^pul Fh (*.网| MJitiMewl lf 高分辨率遥感影像分类实验报告 班级: 姓名: 学号: 指导老师: 地球科学与环境工程学院 二〇一四年六月 目录 1实验方法——面向对象方法 (1) 2实验内容 (1) 2.1 影像预处理 (1) 2.1.1影像数据融合 (1) 2.1.2 影像增强处理 (2) 2.2 创建工程 (2) 2.3 分割处理 (3) 2.4 分类 (4) 2.4.1 水体 (4) 2.4.2陆地 (5) 2.4.3 植被 (6) 2.4.4 裸土 (7) 2.4.5 建筑物 (8) 2.4.6 道路 (9) 2.4.7 阴影 (10) 2.4.8 总体分类图 (12) 3 结语 (13) 1实验方法——面向对象方法 面向对象方法是一个模拟人类大脑认知的过程,将图像分割为不同均质的对象,充分利用对象所包含的信息,将知识库转换为规则特征,从而提取影像信息。因为分析的是对象而不是像元,因此我们可以利用对象丰富的语义信息,结合各种地学概念,如面积、距离、光谱、尺度、纹理等进行分析。 面向对象的遥感影像分析方法与传统的面向像元的影像分析方法不同。首先需要使用一定方法对遥感影像进行分割,在提取分割单元(图像分割后所得到的内部属性相对一致或均质程度较高的图像区域)的各种特征后,在特征空间中进行对象识别和标识,从而最终完成信息的分类与提取。 2实验内容及详细过程 2.1 影像预处理 2.1.1影像数据融合 实验数据为QuickBird影像,包括4个多光谱波段以及一个全色波段。QuickBird影像星下点分辨率:全色为0.61m,多光谱为2.44m。对于面向对象影像分类来说,越高的高空间分辨率越好,但在对对象进行分类时,光谱信息同样重要,因此,可将高分辨率的全色影像和多光谱影像进行数据融合。 使用ERDAS进行数据融合:Interpreter→spatialenchancement→resolution merge。 图 1 全色影像与多光谱影像融合 中国突破高分辨率遥感卫星测绘关键技术 卫星测图是一个国家对地观测水平的重要标志。长期以来,中国卫星影像精度不高,一直依靠航空影像和国外卫星影像进行测图。 在10日举行的国家科技奖励大会上,“国产民用高分辨率立体测图卫星测绘和应用关键技术”项目获得国家科技进步一等奖。这一项目结束了中国遥感卫星难以测图的历史,打破了国外的技术封锁和数据垄断,使中国成为国际上少数几个掌握成套卫星测绘技术的国家。 2012年1月9日,中国首颗民用高分辨率立体测图卫星资源三号发射成功,随后不到一个月时间内,资源三号卫星应用系统的第一幅地形图就产生了,并且平面与高程精度都优于3米,测绘精度超过了国外同类卫星。 “此前,中国1:5万卫星测绘数据源基本依赖国外卫星。”资源三号卫星工程应用系统总设计师、国家测绘地理信息局卫星测绘应用中心副主任唐新明介绍说,这个项目实现了国产遥感卫星从“有”到“好用”、从示范应用到业务化运行的根本性转变。项目实现了五项第一,将无地面控制卫星测图的精度提高了近百倍。 唐新明说,这一项目突破了困扰中国高分辨率遥感数据长期依赖进口的瓶颈。资源三号成功应用不久,国外同类卫星数据的价格就大幅下降,从每平方公里40元降至6元。更重要的是,这一技术跨越对维护国家安全具有重大意义。 目前资源三号应用系统基本实现规模化、业务化生产,能实现当 天接收数据、当天完成处理,业务化生产水平也已完全与国际接轨。为测绘、国土、地矿、水利等众多行业提供了5000万平方公里的影像,为全国1:5万基础地理信息数据库更新工程、全国首次地理国情普查等国家重大项目提供了1500万平方公里的影像,同时还向美国、澳大利亚等30多个国家、地区提供了450万平方公里的影像数据。 在资源三号之后,中国计划用10年至15年时间建立测绘遥感卫星体系。目前3颗资源三号后续测绘卫星已纳入国家相关规划,2014年力争发射资源三号02星,实现两颗资源三号测绘卫星组网运行。 二○一一届毕业设计 面向对象的高分辨率遥感影像分类Object-oriented Classification of high Resolution Remote Sensing images 学院:地质工程与测绘学院 专业:遥感科学与技术 姓名: 学号: 指导教师: 完成时间:2011年6月17日 二〇一一年七月 摘要 高空间分辨率遥感影像使得在较小的空间尺度上观察地表细节变化,进行大比例尺遥感制图,以及监测人为活动对环境的影响成为可能。随着高分辨率影像的应用越来越普及,迫切要求人们对高分辨率遥感信息提取进行研究,以满足高分辨率影像信息不断增长的应用和研究需要 高分辨率遥感影像光谱信息有限,空间信息丰富,地物的尺寸、形状及相邻地物间的关系都得到很好的反映。面向对象的分类方法与传统的基于像素的分类相比,不仅仅是依靠光谱信息,而且还充分利用影像的空间信息,分类时也克服了基于像元的逐点分类无法对相同语义特征的像素集合进行识别的缺点,是一种目前最适合于高分辨率遥感影像的分类方法。 本文采用面向对象的分类方法对高分辨率影像进行分类,该方法首先对影像进行多尺度分割获得同质区域对象,在此基础上利用模糊分类思想对分割后的对象进行分类。该方法不仅充分利用了高分辨率影像的空间信息,还将基于像素的分类提升到了基于对象的分类。 多尺度分割采用的是区域生长合并算法,通过对尺度阈值、光谱因子及形状因子等参数的控制,可以获得不同尺度下有意义的对象。分割后的对象不仅包含了原始的光谱信息,还可以提供大量辅助特征,如纹理、形状、拓扑等特征。综合利用这些特征以及模糊分类的思想,使得高分辨率影像分类在减少分类不确定性的同时,还提高了分类的精度。 最后将面向对象分类结果与传统的基于像素分类结果进行对比分析,发现其分类精度要明显高于传统法,且具有较强的抗噪声的功能,分类所得的地物结果相对较为完整,具有更丰富的语义信息,更加符合客观现实情形。 关键词:高分辨率遥感影像,面向对象的分类,影像分割,多尺度,最近邻分类 北京揽宇方圆信息技术有限公司 表1:商业光学高分辨率卫星参数一览表 北京揽宇方圆信息技术有限公司是国内的领先遥感卫星数据机构,而且是整合全球的遥感卫星数据资源,分发不同性能、技术应用上可以互补的多种卫星影像,包括光学、雷达卫星影像、历史遥感影像等各种卫星数据服务,各种专业应用目的的图像处理、解译、顾问服务以及基于卫星影像的各种解决方案等。遥感卫星影像数据贯穿中国1960年至今的所有卫星影像数据,是中国遥感卫星数据资源最多的专业遥感卫星数据服务机构,提供多尺度、多分辨率、全覆盖的遥感卫星影像数据服务,最大限度的保证了遥感影像数据获取的及时性和完整性。 优势: 1:北京揽宇方圆国内老牌卫星数据公司,经营时间久,行业口碑相传,1800个行业用户选择的实力见证。 2:北京揽宇方圆遥感数据购买专人数据查询一对一服务,数据查询网址是卫星公司网。 3:北京揽宇方圆拥有大型正版遥感处理软件,遥感数据处理工程师有10年以上遥感处理工作经验,并有国家大型项目工作经验自主卫星数据处理软件著作权,最大限度保持遥感卫星影像处理的真实度。 4:北京揽宇方圆国家高新技术企业,通过ISO900认证的国际质量管理操作体系,无论是遥感卫星品质和遥感数据处理质量,都能得到保障。 5:影像数据官方渠道:所有的卫星数据都是卫星公司授权的原始数据,全球公众数据查询网址公开查询,影像数据质量一目了然,数据反应客观公正实事求是,数据处理技术团队国标规范操作,提供的是行业优质的专业化服务。 6:签定正规合同:影像数据服务付款前,买卖双方须签订服务合同,提供合同相应的正规发票,发票国家税网可以详细查询,有增值税普通发票和增值税专用发票两种发票类型可供选择。以最有效的法律手段来保障您的权益。 7:对公帐号转款:合同约定的对公帐号,与合同主体名发票上面的帐号名称一致,是由工商行政管理部门核准的公司银行账户,所有交易记录均能查询,保障资金安全。 8:售后服务:完善的售后服务体制,全国热线,登陆官网客服服务同步。 技术能力说明 北京揽宇方圆拥有大型正版遥感处理软件,遥感数据处理工程师有10年以上遥感处理工作经验,并有国家大型项目工作经验自主卫星数据处理软件著作权,最大限度保持遥感卫星影像处理的真实度。 第53卷第4期华中师范大学学报(自然科学版) Vol.53No.4 2019年8月JOURNAL OF CENTRAL CHINA NORMAL UNIVERSITY(Nat.Sci.)Aug .2019收稿日期:2019-03- 04.基金项目:十三五科技部国家重点研发计划项目(2016YFC0803107,2016YFB052601,2017YFB0504103). *通讯联系人.E-mail:duanxuelin@w hu.edu.cn.DOI:10.19603/j.cnki.1000-1190.2019.04.017文章编号:1000-1190(2019)04-0568- 07基于DCNN的高分辨率遥感影像场景分类孟庆祥,段学琳 (武汉大学遥感信息工程学院,武汉430000 )摘 要:针对传统场景分类方法不能准确地表达高分辨率遥感影像丰富的语义信息问题,提出了一种基于卷积神经网络的高分辨率影像场景分类方法.此方法大致分为3步:第1步,依据不同卷积窗口做卷积运算提取颜色, 纹理和形状等低阶特征;第2步,利用池化层将这些低阶特征进行过滤,得到重要特征;第3步,重组提取出来的特征以形成高阶语义特征进行场景分类.在具体实验中利用三个不同尺寸的卷积核对数据集进行分类探究,并且使用了数据增广、正则化和Dropout等手段,提升模型对新样本的适应能力,很好地解决了过拟合问题.该方法在所进行的实验中表现良好,在WHU-RS19数据集上取得了88.47%的准确率,和传统的场景分类方法相比,显著提升了分类精度. 关键词:高分辨率遥感影像;场景分类;深度学习;深度卷积神经网络中图分类号:P237 文献标识码:A 遥感技术的不断发展, 带来了影像分辨率的提升.这种高空间分辨率的遥感影像具有丰富的空间信息和纹理特征,包含了大量的语义信息.然而面向像素和面向对象的解译方法存在着很多不足,无法满足遥感影像高层次内容解译的需求.因此,对高分辨率遥感图像进行场景分类成为了当前遥感 图像解译中活跃的研究课题[1]. 场景分类是遥感研究领域的热点.通俗的来说,就是用给定的图像,通过其包含的内容对它的场景类别进行判断.传统的场景分类方法可以概括为两类:基于低层次特征的方法和基于中层语义 特征建模的方法[2] . 基于低层特征的场景分类,即依赖于颜色、纹理和形状等低层特征的分类方法,此类分类算法比较简单,但泛化能力较弱、精度不 够高[3-4]. 基于中间语义的图像分类,即先生成底层特征, 然后结合分类器实现图像场景分类,其代表有视觉词袋(BoVW)[5]以及由此衍生的空间金字塔匹配核(SPMK) [6]等,此类方法会导致信息的丢失,存在一定的局限性. 由于传统的场景分类方法无法满足大数据环 境下人们的分类要求,学者们开始将深度学习[7-8]算法应用到影像分类中.典型的深度网络模型[9]主要有深度置信网(DBN)[10] 、栈式自动编码器网络(SAE)[11]和卷积神经网络(CNN)[12- 13]. 其中,卷积神经网络是目前较为流行的基于监督的深度学习方法, 该方法在图像识别、物体识别、图像语义分割中都得到了广泛的应用.近年来,越来越多的学者将卷积神经网络运用于图像分类.文献[14]将卷积神经网络用于图像分类,在CIFAR-10数据集上取得了较好的分类效果.文献[15]用卷积神经网络对Landsat TM5中等分辨率遥感影像进行了分类实验,并与支持向量机分类结果进行比较,在一定程度上体现了卷积神经网络在图像分类的优越性.与此同时,有学者将卷积神经网络运用于遥感影像的场景分类,并取得了一定的进展,这种场景分类方法很快受到了广泛的关注. 在此基础上,本文提出一种基于深度卷积神经网络的场景分类模型DCNN,将该模型用于高分辨率遥感影像的场景分类,加入数据增广并且利用正则化方法和丢弃函数调整模型参数,最终实现基于卷积神经网络的高分辨率遥感影像分类. 1卷积神经网络 卷积神经网络是一种受生物学启示的,包含卷积计算且具有深度结构的前馈神经网络.它可以进行监督分类,提取出遥感影像中的语义特征.一个 基本的卷积神经网络结构有3层[16- 17]:输入层-隐 含层-输出层, 隐含层又分为4部分———卷积层、 国外几种高分辨率遥感卫星对比 摘要:通过高分辨率遥感卫星应用这门课程的学习,我对高分辨率遥感卫星产生了很大的兴趣,其重要的两个影响因素就是大气辐射和波段选择。各国送上太空的高分辨率遥感卫星也是不计其数,我想搜集一下现在世界上流行的高分辨率遥感卫星对我们的学习和提升自身水平是很有帮助的。以下就是我所搜集到有关各种高分辨率遥感卫星的详细信息。 关键词:高分辨率卫星大气辐射波段选择 GeoEyeGeoEye-1 高分辨率卫星 世界上规模最大的商业卫星遥感公司美国 GeoEye,已于 2008 年 9 月 6 日成功发射了迄今技术最先进、分辨率最高的商业对地成像卫星——GeoEye-1。该卫星具有分辨率最高、测图能力极强、重访周期极短的特点,已为全球广大用户所关注。GeoEye-1 高分辨率卫星影像应用前景广阔,在实现大面积成图项目、细微地物的解译与判读等方面优势突出。 GeoEyeGeoEye-1 卫星特点 ?真正的半米卫星:全色影像分辨率 0.41 米,多光谱影像分辨率 1.65 米,定位精度 达到 3 米?大规模测图能力:每天采集近 70 万平方公里的全色影像数据或近 35 万平方公里的全色融合影像数据?重访周期短:3 天(或更短)时间内重访地球任一点进行观测 GeoEye-1 影像参数 eoEye全色和多光谱同时(全色融合)相机 模式单全色单多光谱分辨率星下点全色:0.41 m ;侧视 28°全色:0.5m;星下点多光谱:1.65 m 全色:450 nm---800 nm 蓝: 450 nm ---510 nm 波长多光谱红: 655 nm ---690 nm 近红外: 780 nm ---920 nm 立体 CE90: 4m;LE90:6m 定位精度(无控制点)定位精度(无控制点)单片 CE90:5m 幅宽成像角度重访周期星下点 15.2 km ;单景 225 k ㎡(15×15 km) 可任意角度成像 2-3 天绿: 510 nm ---580 nm 全色:近 700,000 k ㎡ / 天 (相当于青海省的面积) 单片影像日获取能力全色融合:近 350,000 k ㎡ / 天 (相当于湖南、湖北两个省的面积) GeoEyeGeoEye-1 技术参数运载火箭发射地点卫星重量星载存储器数据下传速度运行寿命 Delta II 加利福尼亚范登堡空军基地 1955 kg 1T bit X-band 下载,740 mb/sec 设计寿命 7 年,燃料充足可达 15 年储存并转送数据传输模式实时下传直接上传和实时下传轨道高度轨道速度轨道倾角/ 轨道倾角/过境时间轨道类型/ 轨道类型/轨道周期 684 km 约 7.5 km/sec 98°/10:30am 太阳同步/98min CartosatCartosat-1 号卫星又名 IRS-P5 ,是印度政府于 2005 年 5 月 5 日发射的遥感制图卫星,它搭载有两个分辨率为 2.5 米的全色传感器,连续推扫,形成同轨立体像对,数据主要用于地形图制图、高程建模、地籍制图以及资源调查等。Cartosat-1 设计寿命 5 年,目前卫星运行等各项指标正处于最好的时期,数据质量稳定可靠。 P5 卫星轨道参数 轨道轨道高度总轨道数长半轴偏心率倾角降交点时间相邻 遥感图像分类方法的研究现状与发展趋势 摘要:遥感在中国已经取得了世界级的成果和发展,被广泛应用于国民经济发展的各个方面,如土地资源调查和管理、农作物估产、地质勘查、海洋环境监测、灾害监测、全球变化研究等,形成了适合中国国情的技术发展和应用推广模式。随着遥感数据获取手段的加强,需要处理的遥感信息量急剧增加。在这种情况下,如何满足应用人员对于大区域遥感资料进行快速处理与分析的要求,正成为遥感信息处理面临的一大难题。这里涉及二个方面,一是遥感图像处理本身技术的开发,二是遥感与地理信息系统的结合,归结起来,最迫切需要解决的问题是如何提高遥感图像分类精度,这是解决大区域资源环境遥感快速调查与制图的关键。 关键词:遥感图像、发展、分类、计算机 一、遥感技术的发展现状 遥感技术正在进入一个能够快速准确地提供多种对地观测海量数据及应用研究的新阶段,它在近一二十年得到了飞速发展,目前又将达到一个新的高潮。这种发展主要表现在以下4个方面: 1. 多分辨率多遥感平台并存。空间分辨率、时间分辨率及光谱分辨率普遍提高目前,国际上已拥有十几种不同用途的地球观测卫星系统,并拥有全色0.8~5m、多光谱3.3~30m的多种空间分辨率。遥感平台和传感器已从过去的单一型向多样化发展,并能在不同平台 上获得不同空间分辨率、时间分辨率和光谱分辨率的遥感影像。民用遥感影像的空间分辨率达到米级,光谱分辨率达到纳米级,波段数已增加到数十甚至数百个,重复周期达到几天甚至十几个小时。例如,美国的商业卫星ORBVIEW可获取lm空间分辨率的图像,通过任意方向旋转可获得同轨和异轨的高分辨率立体图像;美国EOS卫星上的MOiDIS-N传感器具有35个波段;美国NOAA的一颗卫星每天可对地面同一地区进行两次观测。随着遥感应用领域对高分辨率遥感数据需求的增加及高新技术自身不断的发展,各类遥感分辨率的提高成为普遍发展趋势。 2. 微波遥感、高光谱遥感迅速发展微波遥感技术是近十几年发展起来的具有良好应用前景的主动式探测方法。微波具有穿透性强、不受天气影响的特性,可全天时、全天候工作。微波遥感采用多极化、多波段及多工作模式,形成多级分辨率影像序列,以提供从粗到细的对地观测数据源。成像雷达、激光雷达等的发展,越来越引起人们的关注。例如,美国实施的航天飞机雷达地形测绘计划即采用雷达干涉测量技术,在一架航天飞机上安装了两个雷达天线,对同一地区一次获取两幅图像,然后通过影像精匹配、相位差解算、高程计算等步骤得到被观测地区的高程数据。高光谱遥感的出现和发展是遥感技术的一场革命。它使本来在宽波段遥感中不可探测的物质,在高光谱遥感中能被探测。高光谱遥感的发展,从研制第一代航空成像光谱仪算起已有二十多年的历史,并受到世界各国遥感科学家的普遍关注。但长期以来,高光谱遥感一直处在以航空为基础的研究发展阶段,且主要高分辨率遥感影像分类实验报告
中国突破高分辨率遥感卫星测绘关键技术
面向对象的高分辨率遥感影像分类
高分辨率卫星影像卫星参数表
基于DCNN的高分辨率遥感影像场景分类
国外几种高分辨率遥感卫星对比
遥感图像分类方法的国内外研究现状与发展趋势