第三章 模型的简化
第三章模型的简化
本章围绕模型如何简化展开讨论,第一部分是有关模型描述变量的简化方法,它适应于各类系统模型的简化;第二部分是有关动态系统的模型简化的时域方法,它包括“集结法”和“摄动法”。
3.1 模型描述变量的简化
模型描述变量是系统建模的基础,它们选取的主要依据是建模的目标,而它们的选取则决定了模型的复杂程度。
建模过程中,在能满足建模的前提下,系统的描述变量应是愈简单愈好。模型描述变量一般有以下四种方法:
1、淘汰一个或多个实体、描述变量或相互关系规则;
2、随机变量取代确定性变量;
3、粗化描述变量;
4、粗化描述变量和归组实体及聚焦变量。
3.1.1 淘汰一个或多个实体、描述变量或相互关系原则
1、淘汰实体或描述变量
建模者决定淘汰那些次要因素,只要忽略的因素不会显著地改变整个模型行为,相反却使不必要的复杂了。
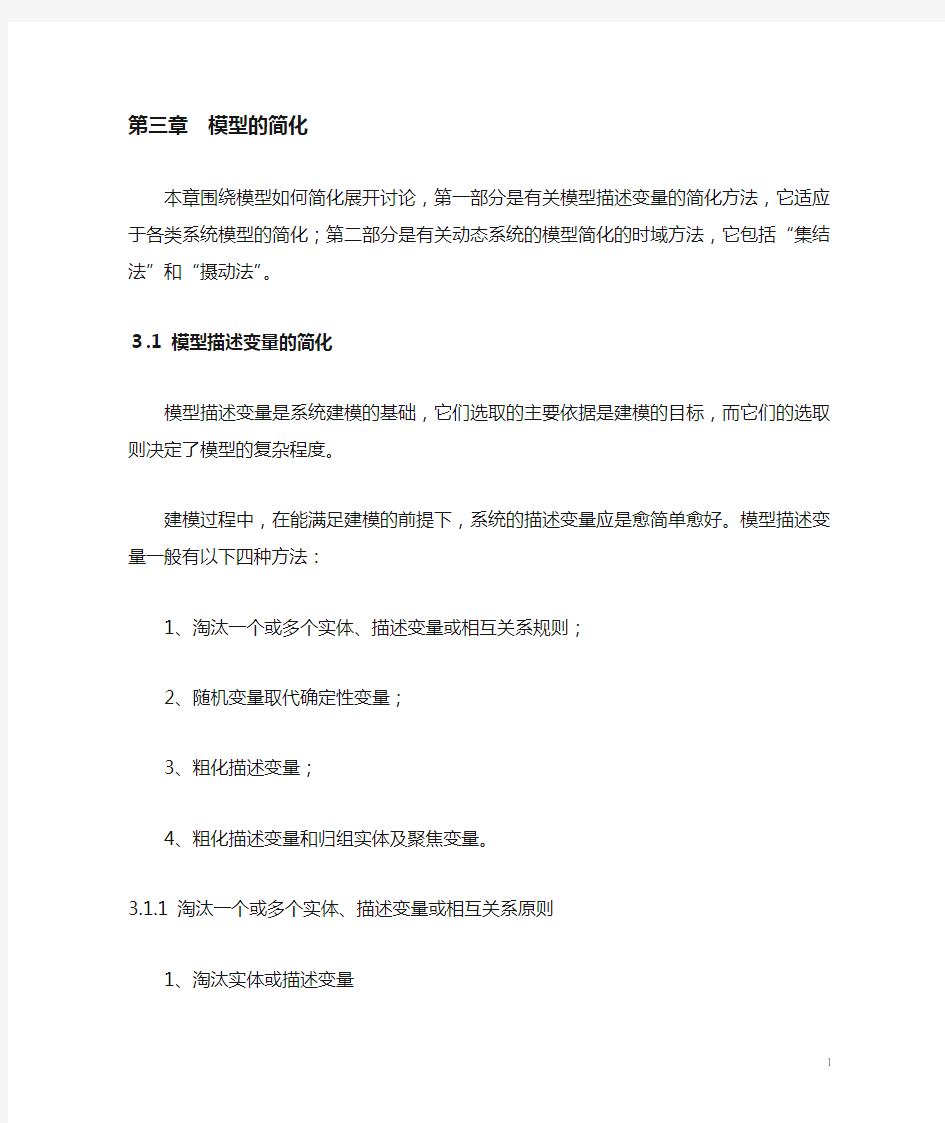
淘汰一个实体可能要淘汰或修改其他实体:批淘汰一个实体,需要淘汰所有涉及这个实体的描述变量;淘汰一个描述变量,需要淘汰或修改涉及该变量的相互关系。
P53 图3.1例子
2、相互关系的淘汰
相互关系的淘汰通常可用泰勒级数展开式的简化来实现,它可使一组数值变量之间的相互关系变得更加简洁。
3.1.2 随机变量取代确定性变量
在一个确定性模型中,相互关系的规则控制着整个描述变量的值。有些随机值也是由相互关系的规则确定,为了使模型相对简化,可利用概率原理,用随机变量来取代某些变量的相互关系规则,从而将影响变量转换成随机变量。
P53页书图3.2
3.1.3 粗化描述变量
描述变量是描述模型实体条件的一种方法,变量可能出现的值表示在某一时间可找到这个实体的一种可能条件,其变量的范围集是变量可能出现的所有值的集合。描述变量的范围粗化也是一个简化过程。
粗化有以下2种方法:
1、舍入.
根据需要,将描述变量的范围进行一定的缩小。例如,记账常用元角分,简化后只有元,角和分舍入。
2、归类和非一致粗化。对于归类和非一致粗化,简化前后的描述变量虽然还是
一一对应,但是它们所代表的物理意义已经不同。
见P54例子
3.1.4 归组实体及聚焦变量
把具有相同性质的实体或描述变量聚焦起来,合并并成一个实体或描述变量,这称为实体的归组和聚焦。
特点:在聚焦过程中信息不受损失,且合成变量的范围粗化。
P54例子3。1
3.2 动态系统的模型简化---集结法
在动态模型简化的时域方法中,主要有“集结法”和“摄动法”,这两种方法分别是从经济理论与数学中引进来的。系统的集结法是指用一组“较粗略的”状态变量来描述系统的模型,但应使这个系统的关键性不变。
集结法的基本思想可用映射的观点加以说明,图3.3表示了用集结法进行模型降阶过程的示意图。在图中,X、Y、Z和V为拓扑空间;f是线性连续映射,它表示外生变量x∈X与内生变量y∈Y之间的关系,即为原始高阶模型;h和g表示集结过程,其中h:X→Z和g:Y→V;z∈Z和y∈Y分别是集结起点变量和集结终点变量;连续映射k:Z→V表示简化模型或集结模型。用集结法简化模型的方法就是在给定原始高阶模型f并以适当方式确定h和g后求解k的方法。
3.2.1 精确集结法
1、线性定常系统的集结过程和分析
如图3.4所示,对于一个线性系统:
)
()()0(),()()(0t Dx t y x x t Bu t Ax t x
==+= 3.1
x(t)为(n ×1)状态向量,u(t)为(m ×1)控制向量,y(t)为(r ×1)输出向量。A,B,D 分别是n ×n ,n ×m 和r ×n 矩阵。
设z(t)=Cx(t),z(0)=z 0=Cx 0,C 为l ×n(l <n)常数集结矩阵,Z 为x 的集结(l ×l ),设Rank|C|=l,集结系统为
)
()()0(),()()(0t Kz t y z z t Gu t Fz t z
==+=
把z(t)=Cx(t)代入,集结系统变为
)
()(),()()(t KCx t y t Gu t FCx t x
C =+= 3.2
对比式(3,1)和(3.2),可得动态精确性条件为:FC=CA G=CB KC=D 定义误差向量e(t)=z(t)-Cx(t),则
)
()()()()()()()()())()(()
()()()()()()(t u CB G t x CA FC t Fe t u CB G t x CA FC t Cx t z F t CBu t CAx t Gu t Fz t Cx t z t e -+-+=-+-+-=--+=-= 若满足前二个条件,FC=CA G=CB ,则)()(t Fe t e
= 因此,对于误差向量e(t),若e(0)=0,e(t)=0,此集结为动态精确性集结;若e(0)≠0,而为稳定矩阵,则)()(t Fe t e =,即渐进满足动态精确性集结。 2、集结矩阵确定方法 (1)利用广义逆
由数学知识可知,任何矩阵P 都有其广义逆矩阵1)(-T T PP P 。因此,对于Rank[C]=r,有
1)(-+==?=T T CC CAC CAC F CA FC CB G = 因此,只要知道C 就可求F,G,得到集结模型。
但是,这种方法要求知道A 的全体特征根,这一要求对于大系统讲是很不实用的。 (2)利用可控矩阵
对于原有系统,可控性矩阵B W A [= AB A 2B …A n-1B]; 对于集结系统,可控性矩阵W F =[G FG F 2G …F n-1G]。根据条件FG=CA 和G=CB ,可有W F =CW A 。 若原系统可控,则有rank{W A }=n ,所以矩阵C
1)(-+
==T
A F T
A F A F W W W W W W C 3.3 P57 3.2例子 3.2.2 模态集结法
模态集结法,首先通过线性变换将高阶系统方程化为模态形式,然后再简化,使得集结模型能精确地保留原高阶系统的主要模态,以实现完全集结。 对于式(3.1)的线性定常系统,如果其特征值为}{A i λ,系统集结时希望保留 r 个优势特征值,即时间常数较大的优势极点。模态集结法就是用某些特征向量组成的矩阵作为集结的基础,它的第一步工作就是将原有的状态方程变换为模态形式。如果原系统的特征值不同,则模态形式的系统矩阵是对角阵,其对角元素为特征值的情况,则为分块对角阵。
一般情况下,首先将特征值按 [}{A i λ]的模递升次序排列。设m i 为第i 个特征值所对应的特征向量,模态矩阵由这些特征向量构成,为
M=[m 1 m 2 …m n ] 根据特征向量的定义,有AM=MJ,J 为特征值对角阵或分块对角阵。
对于式(3.1)的饿线性定常系统,作线性变换x(t)=Mw(t),得到w(t)为状态的模态形式方程
)()()(11t Bu M t AMw M t w
--+= 因为M -1AM=M -1MJ=J ,并设K=M -1B ,则模态形式方程
)()()(t Ku t Jw t w
+= 如果原系统的优势极点和劣势极点的分界非常明显,其模态矩阵M 和模态形式方程可表示成
??
?
???=4321
M M M M M )()()(0021212121t u K K t t J J w w
??
?
???+??????????
??=??????ωω (3.4) 1、戴维森法
思路简单----只考虑原系统的优势极点,完全忽略其他特征根的影响。这样由式(3.4),有
)()()()()(11111t Bu PM t w PJP t PKu t w J t w T -+=+=
其中P:[I l 0]是l ×n 变换矩阵,又有 )()(11
11t x M t w -= ,得到集结方程
)()()(11111111t Bu PM M t x M AMP PM M t w T ---+= 因此对于戴维森模态集结法,其集结矩阵F ,G 为
1111--=M AMP PM M F T ,B PM M G 11-= P60例子3.3 3、奇达巴拉法 3.2.3 连分式集结法
连分式集结法是一种比较流行的大系统降阶方法,它是以系统闭环传递函数在s=0处的泰勒级数展开式为基础,研究多输入多输出系统的降阶模型。在此,主要是利用连分式集结法来求单输入单输出线性时不变大系统在集结概念下产生的降阶模型。 对于线性定常系统
Cx
t y Bu Ax t x
=+=)()( (3.9)
步骤:
1、通过线性变换,可将上式变成可控矩阵的第二标准型,得到标准型下的A,B,C 。
2、采用修正的Routh-Hurwitz 阵列求得P 阵。
3、根据集结的要求选取S=[Ir,0],主要定r 的大小
4、根据已算出的P 和R 的大小,可求出集结后的系统为
Gu Fz Z
+= 其中,1-=SPAP FS ,SPB G = P65 例子3.5 3.2.4 链式集结法 1、概念
链式集结法是根据非集结系统的信息结构,用“广义海森堡表达式”来描述,集结过程中可舍去系统中的弱可观测部分。 对于线性定常系统
x
C t y Bu Ax t x 1)()(=+=
利用输出方程作为集结方程,通过线性变换x C Z 11=对系统进行集结。11n R z ∈为
集结模型的状态变量,n r 1。集结模型为:
1
11111z y u G z F z =+=
如能满足1111C F A C =和B C G 11=,集结模型能给出原系统输入—输出的精确描述。由于一般情况下,第一次集结不会得到完全集结模型,需要进行第二次集结来扩大集结模型的维数。这种重复集结的过程就是链式集结。 2、链式集结方法
(1)把系统通过线性变换,转换成能观标准型,把系统分成两个串联的子系统,一个能观测的子系统,即为集结子系统,另一个为不可观子系统,为剩余子系统。 (2)步骤 a.求变换矩阵F
根据rank(C 1)=r 1,通过状态排序,将C 1表示成 ]|[12111C C C =,det 011≠C (3.17) 得到一个变换矩阵T1:
??
?
?
??=-10
1211
1r n I C C T b.做线性变换 Z=T 1x 得到
u G G z z F F F F z z z ??????+??
??????????=??????=21212221121121~~~ 其中, 1z
为集结子系统,2z 为剩余子系统。 c.判断系统是否完备,
*0~
12=F ,有1111C F A C =此时大系统就可表示成两个串联子系统。 *0~
12≠F ,就进行第二次集结,通过对剩余子系统的集结来扩大集结子系统以寻求集结模型。
方法是把2122~
z F v =,同理再取变换矩阵,常取E2=I2,对剩余的子系统进行集结。 d.同理判断第二次集结是完全的可终止链式集结过程。 P69 例子3.6
3.3动态系统的模型简化----摄动法
摄动法的基本概念是略去模型内部的某些相互作用,从而用一个低阶模型来逼近系统的结构,它是一种近似集结法,包括弱耦合和强耦合模型,也叫做非奇异摄动法和奇异摄动法。
1、弱耦合系统的集结
有的情况下,线性定常系统可表示成由两个子系统组成的弱耦合系统
?
?
??????????+????????????=??????212211212122112121u u B B B B x x A A A A x x
εεεε 式中ε是个小的正耦合参数,11n R x ∈和11m R u ∈分别为第一子系统的状态和控制向量,
22n R x ∈和22m R u ∈分别为第二子系统的状态和控制向量,
m m m n n n =+=+2121,,且A ,B 的各个块分为常数矩阵。显然,当ε=0时,系统可解耦为两个独立的系统
2
22
22
11111??????u B x A x
u B x A x
+=+=
当ε非常小时,原有系统也可集结为以上两个模型。这样整个系统就可按两个分散系统来
进行设计、仿真,可明显减少计算量。
2、弱耦合系统的判定条件 对于上述系统设
11211,,2,1
},?,?,?{}{n i A n ==λλλλ 2
1112,,1},?,?{}{1n n n j A n n ++==+ λλλ n k A n ,,2,1},,,{}{21 ==λλλλ
|}{1|m ax A r i i
λ=----------表示1A 的特征值位于复平面上以r 为半径的圆内或圆上。
|}{2|max A R j j
λ=----------表示2A 的特征值位于复平面上以R 为半径的圆内或圆上。
|)(,1212|max j i ij
A εε=----------表示12A 的中元素的模数最大值。
|)(,2112|max l k ij
A εε=-------表示21A 的中元素的模数最大值。
若满足下列条件,这系统则称为弱耦合系统: 1< 21121< 有一类系统,它的状态变量之间耦合较强不允许被忽略,但特征值的模之间数值差别较大,也就是过渡过程速度上差别较大。 1、非奇异摄动法 在状态方程的左侧,对状态向量的时间微分项乘以一个小参数 0)(),()()()()(),()()()(022*******z t z t u B t z A t x A t z x t x t u B t z A t x A t x =++==++= ε (3.19) 式中,1n R x ∈和2n R z ∈为系统的状态向量,1m R u ∈为控制向量,且ε是一个小的正数, 它表示系统中慢模态和快模态变化速度之比。若2A 是稳定且非奇异的,当ε趋近0时 )(?)(?)(?)(?)()(?)()(?21 211 2 212121*********t u B A t x A A t z t u B A A B t x A A A A t x ------=-+-= (3.20) 这样上式可看作系统的一个近似集结模型,即原系统的n 个特征值可用现系统(211 2121A A A A --)的l 个特征值来近似表示。 对于式(3.19)非时变奇异摄动系统,其对应的状态矩阵为 ?? ? ???=εε //221 121A A A A A 过渡过程较快的模所对应的元素(ε/21A ,ε/2A )比上半部分大一个数量级,当ε=0,矩阵A 的元素为无界,ε从ε=0到ε>0的变化称为奇异摄动。 2、集结系统的校正 从式(3.19)到(3.20)的集结过程中,丢掉了z(t)的初始条件z 0,因为)()(?00t z t z ≠,我们把它们的之间的差值称为左边“边界层”,边界层校正就是研究边界层所引起的系统模态的暂态过程,并以此来校正集结的系统。 P74 ---75 作业: 1、模型描述变量化简与动态系统的模型化简二者间的区别; 2、模型描述变量化简的四种方法比较; 3、什么是集结法? 4、在集结法中,小结以下几种方法的针对对象、原理等方面异同点:精确集结法、模态集结法、连分式集结法以及链式集结法; 5、P65页的例子3.5 详细写出计算步骤,验证书中结果是否正确; 6、摄动法是从什么方面入手对模型进行化简的?如何实现的? 三维模型轻量化技术 1 模型轻量化的必要性 设计模型是一种精确的边界描述(B-rep)模型,含有大量的几何信息,在现有的计算机软硬件条件下,使用设计模型直接建立大型复杂系统装配、维修仿真模型是不可能的,因此需要使用轻量化的模型建立仿真模型,以达到对仿真模型的快速交互、渲染。 2 细节层次轻量化技术 90年代中期以来,模型轻量化技术得到了快速的发展,出现了抽壳(hollow shell)技术和细节层次(Level of Details, LOD)技术。抽壳技术只关心产品模型的几何表示而不考虑产品建模的过程信息,LOD技术将产品几何模型设定不同的显示精度和显示细节,根据观察者眼点与产品几何模型之间的距离来使用不同的显示精度,以此达到快速交互模型的目的。 LOD技术是当前可视化仿真领域中处理图形显示实时性方面十分流行的技术之一。LOD模型就是在不影响画面视觉效果的条件下,对同一物体建立几个不同逼近精度的几何模型。根据物体与视点的距离来选择显示不同细节层次的模型,从而加快系统图形处理和渲染的速度。保证在视点靠近物体时对物体进行精细绘制,在远离物体时对物体进行粗略绘制,在总量上控制多边形的数量,不会出现由于显示的物体增多而使处理多边形的数量过度增加的情况,把多边形个数控制在系统的处理能力之内,这样就可以保证在不降低用户观察效果的情况下,大大减少渲染负载。 通常LOD算法包括生成、选择以及切换三个主要部分。 目前轻量化的技术有多种,具有代表性的有JT和3DXML两种。3DXML是Dassault、微软等提出的轻量化技术,JT是JT开放组织提出的轻量化技术。SIEMENS公司的可视化产品都采用JT技术,如我们使用的VisMockup软件。 JT技术用小平面表示几何模型,采用层次细节技术,具有较高的压缩比,模型显示速度很快。 jt、ajt模型及其结构 jt模型文件是三维实体模型经过三角化处理之后得到的数据文件,它将实体表面离散化为大量的三角形面片,依靠这些三角形面片来逼近理想的三维实体模型。 模型精度不同,三角形网格的划分也各不相同。精度越高,三角形网格的划分越细密,三角形面片形成的三维实体就越趋近于理想实体的形状。模型曲面精度由Chordal、Angular 两个参数控制。图1(a),Chordal表示多边形的弦高的最大值,图1(b),Angular表示多边形相邻弦的夹角的最大值。?????????????????????????????? 图1 Chordal和Angular示意图 jt模型有三种结构形式,都保持了原来的产品结构。分别是: (1)Standard(标准结构形式)。包含一个装配文件和多个零件文件,其中零件文件都放在一个和装配文件同名的目录下。我们建立的虚拟样机模型都采用这种结构形式。 (2)Shattered(分散结构形式)。包含多个子装配文件和多个零件文件,其中子装配文件和零件文件都放在一个目录下。这种结构的优点是有子装配文件,并可以直接使用子装配,缺点是文件管理比较乱、不清晰。 三维数字城市建模技术 发表时间:2017-10-16T16:33:38.407Z 来源:《基层建设》2017年第18期作者:梁莉 [导读] 摘要:数字理念应用于城市规划,工程检测,交通服务,政策决定等方面,并在应用中进一步推广了数字应用的纵深发展。 天水三和数码测绘院甘肃省 741000 摘要:数字理念应用于城市规划,工程检测,交通服务,政策决定等方面,并在应用中进一步推广了数字应用的纵深发展。使用较为先进的信息化手段,能够为城市的规划、建设、管理、运营以及一些应急措施的应用发挥良好作用。三维数字城市的建模,能够在很大程度上有效提高政府的实际服务和管理水平,从而有效增强城市的管理效率,为有效节约城市资源发挥重要的作用。 关键词:三维数字;城市建模;建模技术 1引言 城市三维空间信息则具有直观性强、信息量大、内容丰富等优点。三维GIS作为一种能够综合地处理各种空间和属性信息的工具在城市规划、国土监测、交通管理、辅助决策等方面都有广泛的应用,随着人们对三维GIS的认识的不断深入,对城市三维信息需求的不断增加进而提出了三维城市模型的概念。通过对三维GIS中三维城市模型理论及相关的技术方法的探讨,对今后三维城市模型的研究有更为深刻的认识,为今后的工作提供指导。 1.1数字城市概述 随着信息技术的高速发展,美国率先提出了国家信息基础设施和全球信息基础设施计划,随之越来越多的国家加入到全球信息化的行列,从而演变出了数字城市的基本概念。数字城市主要是通过对空间信息的应用,构筑一个虚拟的平台,其中,关于一些社会资源、基础设施、自然资源、人文以及经济方面的信息和内容,能够通过数字形式进行有效获取,从而为社会和政府提供众多的服务。通过数字城市的建设,能够为实现城市信息的综合应用,提供良好的效果。可持续发展是当前社会的重要发展原则之一,对于社会生产生活具有重要影响。建设数字化的城市,能够有效促进可持续发展,增强城市的发展效力。 1.2数字城市是数字地球建设中的重要节点,在实现数字地球计划中占有举足轻重的地位。数字城市建设随着计算机水平的提高,目前正向三维数字城市方向快速发展。自“数字地球”的概念提出以来,在国际国内已引起广泛的关注。数字城市作为数字地球的一个节点,是数字地球中一个不可缺少的重要组成部分。数字城市的建设不仅仅是城市地图的数字化和大比例尺地图测绘、计算机化,它有自身的技术体系。因此,进行相关技术的研究和理论的探讨对数字城市的建设不仅是必要的,而且是必须的。数字城市的建成将为城市各行各业提供权威的、唯一的、通用的空间信息平台,有力促进各部门地理信息资源共享与应用,充分发挥地理信息在政府宏观决策、应急管理、社会公益服务、人民生活改善等方面的作用。 2三维技术构建及建模方法 数字城市需要一个逼真的模拟,实时动态的环境中,考虑到硬件限制和虚拟现实系统。数字城市建模和模拟的动画要求建模方法有一个显着不同的数字城市建模模型分割和纹理映射技术。目前众多世界城市虚拟场景结构在以下方面:基于模型和BR这两种方法可以实现在3DSMAX中验证。多边形模式是第一次使用的建模技术,用一个小平面来模拟表面,从而形成各种形状的三维对象的一个小的平面可以是三角形,矩形或其它多边形,但在实践中更多的使用三角形或矩形。多边形建模的,直接创建基本几何体,根据要求修改调整对象的形状,或使用放样面片建模,组合对象创建的虚拟现实工程,多边形建模的主要优点是简单、方便、快捷,但它产生一个光滑的表面,因此适于构建规则形状的对象,如大多数的人造物体的多边形建模技术是困难的,同时可根据要求,只可通过调整的参数建立的虚拟现实系统该模型可以得到不同的分辨率的模型的虚拟场景的实时显示的需要和适应。 目前实现三维建模的方法大致有以下几种:一是直接利用三维建模软件,如计算机辅助设计软件(AutoCAD)、三维动画渲染和制作软件(3DStudioMax)等工具人机交互式三维建模;二是直接利用GIS的二维数据和高度信息建立三维模型,但这种方法只局限于规则对象的建模;三是基于数字摄影测量原理对物体快速建模。随着数据采集技术的不断发展和自动化,根据三维激光点云数据自动构建三维模型正成为研究的热点。 3三维数字城市建模技术 3.1数字摄影测量技术 数字摄影测量技术的飞速发展与高分辨率卫星影像的出现,使三维数据大批量地快速获取已成为可能。这种建模方法主要的原理是基于遥感影像数据,根据遥感影像之间的相互关系,利用数字摄影测量的基本原理,建立相应的交会模型,进而得到实际地物点的三维坐标,并且建立数字地表模型,再通过相应的纹理映射关系,实现三维景观模型的建立。该技术能够帮助设计人员进行目标建筑物的几何空间与高程数据的快速构建,并且精度高、快速成像。因此,数字摄影测量技术在三维建模中具有十分重要的作用。 3.2航空摄影测量技术 在三维建模领域,航空摄影测量技术的应用较早,在多年来的发展中,已经非常成熟。使用该技术,能够创建立体环境,实现三维模型数据的位置、高度、形状信息的快速与准确获取。然后结合外业纹理采集与正射影响屋顶信息能够进行精细三维模型的构建。然而该技术对建筑物纹理进行提取的过程中,侧面纹理无法被有效获取,因此,同新时期我国的精细化城市三维建模的要求不符。 3.3机载/车载激光扫描技术 在对该技术进行应用的过程中,所构建而成的模型在细节方面可以被充分的表现出来,因此能够形成较高的精度,不需要进行大量的外业就能够完成建模。然而,在应用该技术提取数据的过程中,需要经历复杂的算法过程,可供操作的软硬件短缺,在构建三维模型的时候,应对大量的数据进行应用,如果三维场景模型范围较大,那么在后期传输、存储数据以及浏览的时候,难度较高。 3.4倾斜摄影测量技术 在对近景测量技术和航空摄影技术进行综合应用的过程中,就产生了倾斜摄影测量技术。使用倾斜摄影技术时,能够有效及时地获取到较为丰富的空间影像情况,还能够将其分级别地进行应用,这对于三维建模工作的有效进行,具有较为明显突出的作用。倾斜摄影技术主要是通过倾斜的角度进行成像的,因而,相较于传统的直观角度,这种技术能够让用户们从多个角度进行观察,对于形象、直观地展示地理实际形态具有重要作用,有效改善了正射影像的不足之处。该技术可以从多个层面对建筑物进行观察,同时也能够对贴图纹理进行批量提取,拥有较快的建模速度,也能够更加真实的对地物周边环境进行反映,同时仅需要应用少量的数据就能够完成建模。该技术已经成 基于Garland 的边收缩算法的一种实现 0 引言 随着科学技术的进步,在计算机图形学、虚拟现实、地理信息系统、医学图像系统等领域所构造和使用的模型越来越精细、越来越复杂。这些复杂的模型不但对计算机的存储容量、处理速度提出了很高的要求、而且成为实时绘制、网络传输的瓶颈。因此模型简化成为非常重要的研究课题。模型简化是指在保持原模型几何形状基本不变的前提下,采用适当的算法减少该模型的面片数、顶点数和边数。 近年来,出现了很多有代表性的模型简化算法,其中Galand 的基于二次误差度量的边收缩算法是目前最常采用且有效的算法。其基本思想是以顶点到相关三角形平面的距离的平方和为误差度量,通过重复的边收缩操作对模型进行简化。 1 算法分析与设计 1.1基本概念: 定义1 三角网格是由三位空间中的三角形通过边和顶点连接而成的分段线性曲面。三角网格M 可由顶点集V={v1,v2...vm}和三角集合F={f1.f2...fn} 组成的二元组M=(V,F)来表示 定义2 对M 种任一顶点vi ,与顶点vi 相关的三角形集合记作Planes(i),与边(vi,vj)关联的三角形集合记作Planes(i,j),所有与vi 关联的边构成的集合Edge(i)。 1.2 基于二次误差度量的边收缩算法 基于二次误差度量的边收缩算法是通过不断选择模型中的一条边进行收缩,达到对模型的简化。每收缩一条非边界边,模型减少2个三角形、1个顶点、三条边;收缩一条边界边,模型减少1个三角形、1个顶点、俩条边。 1.2.1 误差度量 简化模型必须与原网格尽量相似,这取决于边收缩的顺序和边收缩后生成的新点的位置。如何选择合适的边进行收缩及如何生成新的顶点,有一个选择误差度量标准的问题。Garland 算法以点到平面的距离为误差度量标准。 设对边(vi,vj)进行收缩,则与(vi,vj)边相关联的三角形集合Planes(i,j)构成了原模型上的 一个区域,设边收缩后生成的新位置v 为[x,y,z,1]T ,定义这次边收缩带来的新误差 △( v )为v 到三角形集合Planes(i,j)中每个三角形所在面的距离的平方和,表示三角 形集合Planes(i,j)中的每个三角形所在面的平面方程ax+by+cz+d=0,且有 1222=++c b a 。在根据点到平面 ax+by+cz+d=0 的距离公式为 222d c b a d cz by ax ++-++= 以及等式运算 ,就有△( v )=2 ) ,() (v p j i Planes p T ∑∈其中: p=(a,b,c,d) T 该式可变换如下: 格网数字高程模型 武汉大学测绘学院 潘正风 一.格网DEM (Digital Elevation Model )生成 1.由离散点求格网点高程 若网格点的坐标为 0x ,0y ,在搜索圆内某数据点的坐标为 i x ,i y ,该点到网格点的距离为: ()()2020y y x x D i i i -+-= 则网格点的高程为 ()()∑∑=i i i D D z z 1 或 ()()∑ ∑=22 /1/i i i D D z z 2.由三角网转换成格网DEM 按线性插值计算格网点高程: ()()()() 21 3131212131312112131312111y x y x x z x z y y z y z y x x z z ---+--- = 式中,1221x x x -=,1331x x x -=,1221y y y -=,1331y y y -=,1221z z z -=,1331z z z -=。 3.等高线内插法 二.数字高程模型的应用 1.计算单点高程 D C B A P z L y L x z L y L x z L y L x z L y L x z ??? ?? -+?+??? ??-+??? ??-??? ??-=1111 2.计算地表面积 地表面积的计算即为各网格的表面积之和。引入一个高程点,构成4个表面空间三角形,三角形面积为: ()()()321S P S P S P P A ---= 式中,()3212 1 S S S P ++= ,222z y x S i ?+?+?=。 3.计算体积 按四棱柱或三棱柱体积计算 The goal is to determine the required near wall mesh spacing, , in terms of Reynolds number, running length, and a target value. A < 200 is acceptable if you are using the automatic wall treatment, if not, continue to read the advice below. After running a solution, the value of (in particular, the value given by the solver variable , representing the value for the first node from the wall) should agree with: model means using a fine mesh and one of the models (which include the SST model). The models do accept coarser meshes, due to the automatic near-wall treatment for these models. with characteristic velocity and length of the plate . The correlation for the wall shear stress coefficient, , is given by: where is the distance along the plate from the leading edge. The definition of for this estimate is: 目的是由雷诺数、行程长度及” 建筑模型制作规范总要 一、总体要求: 1. 软件使用版本为3ds max 9.0 2. 单位设置为米 按照项目的制作要求,模型的制作一律以“米”为单位。(在特殊的情况下可用“毫米”或“厘米”为单位)。 制作人员在制作之前要知道项目的具体制作要求,尤其是制作单位,这样做能保证所有人制作的模型比例正确。场景初始的单位是很重要的,一旦场景单位定义好之后,不要随意变动场景单位,以避免建筑尺寸不对缩放后影响建筑的尺度感。 3. 导入影像图 Max模型制作之前要先整理好对应的影像图文件,制作模型时要导入整理好的影像图文件,作为建模参考线。导入分区好的影像图,以影像图为基准画出地形图。在以影像图为的基础上创建建筑模型,创建好的模型位置必须与影像图画出的地形图文件保持一致。 二、模型制作要求及注意事项 1. 制作注意事项: ?对于模型的底部与地面接触的面,也就是坐落在地面上的建筑底面都应该删除。模型落搭时相 对被包裹的小的面要删除。 ? ?严格禁止模型出现两面重叠的情况,要删除模型中重合的面,不然会造成重叠面在场景中闪烁 的情况。 ?模型Z轴最低点坐标要在0点以上,地面同 理。 ?对模型结构与贴图坐标起不到作用的点和 面要删除以节省数据量。如右图: ?创建模型时,利用捕捉使模型的点与点之间相互对齐,不要出现点之间有缝隙或错位导致面出 现交叉的情况,避免场景漫游时发现闪面或破面的情况影响效果。 ?在保证场景效果的前提下尽量减少场景的数据量。曲线挤压的时候要注意线的段数。必要时候 可以使用折线形式来代替曲线。 ?模型的网格分布要合理。模型中平直部分可以使用较少的分段数,曲线部分为了表现曲线的转 折可以适当的多分配一些。模型平面边缘轮廓点分布尽量均匀,否则容易使模型破面或产生其他问题。 ?保持所有的模型中物体的编辑使用Edit Mesh或Edit Poly方式,为精简数据量,特殊情况可使 用Surface建模,NURBS建模方式基本上不允许使用。 ?如有平面物体表面有黑斑时,应取消这几个面的光滑组。对于曲面要统一曲面的光滑组,避免 龙源期刊网 https://www.360docs.net/doc/4517907751.html, 城市三维建模数据获取及方式研究 作者:曾秀芬贾振涛张睿 来源:《科技资讯》2014年第16期 摘要:随着科技的不断发展,城市的信息化成为了必然的趋势,数字城市的不断完善已 经成为城市壮大的新的契机,成为城市信息化建设的目标。数字三维城市已成为城市规划和管理中重要的手段。本文基于笔者多年从事数字城市的相关工作经验,以三维数字城市为研究对象。探讨了数字城市中三维建模的主要内容和相关建模方式,并以实例的方式实现了三维建筑物建模,结果表明该思路能满足实际应用。全文是笔者长期工作实践基础上的理论升华,相信对从事相关工作的同行能有所裨益。 关键词:数字城市三维建模信息化 中图分类号:P208 文献标识码:A 文章编号:1672-3791(2014)06(a)-0041-02 “数字城市”的概念来源于“数字地球”,它是“数字地球”的理念在城市的引用、延伸和拓展。由于在理解层面和切入角度上的差异,目前仍很难对“数字城市”内涵作确切的定义。但随着对“数字城市”理论与技术的研究及应用探索的不断深入,人们对它的认识将会逐渐趋向统一,并形成对它的标准定义。 三维模型能够真实、生动地表达三维空间信息,成为数字城市的研究重点。建筑物的三维建模作为主要的建模内容有着重要的地位,快速、逼真地建立建筑物的三维模型成为建模的研究重点。 三维地理信息系统的建立,可以和现有的二维地籍数据、规划数据、土地利用数据等结合,分别形成三维地籍系统、三维规划系统、三维土地利用系统等。这些三维系统具有快速的三维漫游、查询、定位、统计、分析、打印输出等功能,将更好地为“数字国土”服务。三维模型的快速建立与更新,对维护三维地理信息系统数据的现势性、直观性、更好地为国土资源利用提供更好的决策,具有十分重要的作用和意义。 1 三维建模技术现状 三维城市模型(3DCityModel,3ocM)是地理信息系统、数字摄影测量及其相关学科的研究热点之一。尽管3DCM的研究历史非常短暂,但人们针对不同的应用目的,构建了各种具 有不同功能的3DCM,具体分为以下几类。 1.1 遥感影像与DEM结合方式 有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材料的体积自锁等问题 ANSYS软件平台提供了网格映射划分和自由适应划分的策略。映射划分用于曲线、曲面、实体的网格划分方法,可使用三角形、四边形、四面体、五面体和六面体,通过指定单元边长、网格数量等参数对网格进行严格控制,映射划分只用于规则的几何图素,对于裁剪曲面或者空间自由曲面等复杂几何体则难以控制。自由网格划分用于空间自由曲面和复杂实体,采用三角形、四边形、四面体进行划分,采用网格数量、边长及曲率来控制网格的质量。 3 ANSYS网格划分基本原则 3.1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。 第25卷 第3期2009年5月地理与地理信息科学 Geog ra phy and Geo-Infor matio n Science V ol.25 N o.3M ay 2009 收稿日期:2008-12-09; 修订日期:2009-02-13 作者简介:关丽(1980-),女,博士研究生,从事遥感与GIS 理论与应用方法研究。E-mail:bing er02600@https://www.360docs.net/doc/4517907751.html, 基于球面剖分格网的矢量数据组织模型研究 关 丽,程承旗,吕雪锋 (北京大学遥感与地理信息系统研究所,北京100871) 摘要:针对球面剖分格网系统的优势和目前矢量数据存储方式存在的缺陷,提出基于球面剖分格网系统的矢量数据组织模型,以期更有效地存储和管理大范围多模式的矢量数据。主要讨论了矢量对象在不同格网层次下的剖分组织方法及其重构表达问题,并创新性地提出了球面矢量交换文件格式(SV E)。同时,基于球面剖分格网系统设计了矢量数据的空间拓扑关系构建模式及多层次表达方式,为球面的矢量对象空间分析奠定了理论基础。关键词:球面剖分格网;矢量数据;组织模型;多层次表达 中图分类号:P208 文献标识码:A 文章编号:1672-0504(2009)03-0023-05 目前,GIS 正面临着海量全球空间数据库、全球性问题研究以及位置相关信息社会化服务等方面的 巨大挑战。传统的基于地图的空间信息表达、组织、管理和发布方式已不能满足全球空间信息管理的需要[1] 。其中,矢量数据作为GIS 常用的图形数据结构,在传统的空间计算、图形编辑以及几何变换方面具有较高的效率和精度。但由于矢量数据是由一系列离散的坐标点组成,因此存在不易分割和重组、数据拼接困难、容易产生断裂等问题[2]。同时,矢量数据的传统分幅存储模式不利于全球空间数据的统一表达、管理和应用。因此,构建一个新的基于全球的、多尺度、融合空间索引机制、无缝、开放的层次性空间数据管理框架,并基于此框架实现各类空间数 据的表达和组织成为实际应用中亟须解决的问题。而球面剖分格网系统(Global Subdivision Grid,GSG)是最具潜力的空间数据管理框架[3-5] ,其研究如何将地球(或球面)剖分为等面积和等形状的层次状面片,并实现高效空间数据的表达和管理。由于矢量数据组织的复杂性,目前通过球面剖分格网对空间数据进行组织和表达的重点仍在栅格数据;对于矢量数据,一般采用转换为栅格数据,然后逐级剖 分的模式,在矢量数据应用时则以图片形式组织[6] 。 这种实现方式显然无法发挥矢量数据特有的空间分析优势。因此,基于GSG 如何实现矢量对象的组织、表达和管理将成为制约大范围多尺度矢量数据应用的瓶颈问题。为了解决该问题,本文提出一种矢量数据的剖分组织模型。 1 球面剖分格网系统 格网应以何种形状、何种方式进行多级划分以 及划分的格网如何编码,是球面剖分格网系统研究的核心问题,国内外相关成果大致可分为3类:正多 面体格网模型、经纬度格网模型和自适应格网模型。正多面体格网模型是采用基于多面体的多边形层叠配置和规则形状划分的方式表达整个球面信息,包 括正四面体、正六面体、正八面体、正十二面体和正二十面体以及14个半规则立体[7] (图1)。以Dutton 的基于八面体的四分三角形格网(Octahedra-l Quaternary Triangular Mesh,O -QTM)[8]和Fekete 的基于正二十面体的球面四叉树(Sphere QuadTree,SQT)[9]为代表,其主要优点是对地球表面进行无缝、多级的格网划分,使全球空间数据能忽略投影的影响。基于此研究成果,袁文提出一种新的球面剖分格网框架体 系)))基于正二十面体和等角比投影的球面三角四叉树(Spherical Triangle Quadtree based on Icosa -hedro n and ERLRP,STQ IE)[10] ,该剖分模型利用等角比投影(Equal Angle Ratio Projection,EARP)的优势,具有剖分性质均衡、坐标转换简单快速的特点(图2),其具体剖分模式及编码方案参见文献[10]。因此,本文以ST QIE 系统为基础,构建矢量数据的剖分组织模型。 2 球面剖分格网的矢量数据组织模型 2.1 矢量数据的剖分组织模式 2.1.1 矢量数据剖分组织流程 由于矢量数据是以连续的坐标记录来表示各种地理实体,因此,基于球面剖分格网组织矢量对象时,除考虑每个面片范围内的坐标点外,还要考虑/剖分化0产生的多余坐标点及空间对象拓扑结构的完整性问题。因此,相比栅格数据,基于球面剖分格网的矢量数据组织具有一定的难 Direct3D中使用网格模型 Complicated geometry is usually modeled using 3-D modeling software and saved to a file. An example of this is the .x file format. Microsoft? Direct3D? uses meshes to load the objects from these files. Meshes are somewhat complicated, but Microsoft? Direct3DX contains functions that make using meshes easier. The Meshes sample project introduces the topic of meshes and shows how to load, render, and unload a mesh. 复杂的几何模型通常是由3D建模软体创建并保存到文件中。例如.x文件就是这样的一种格式,Microsoft Direct3D使用的网格模型都是载入这些文件中的对象。即使模型有些复杂,但在Microsoft Direct3D中包含的函式建立使用它是非常容易,本例子就是介绍网格模型如何从载入渲染得到我们所需的效果,并且如何对其进行释放。 This tutorial shows how to load, render, and unload a mesh using the following steps. 这个指南展示如何载入、渲染、并释放一个网格模型所需要的步骤: Step 1: Loading a Mesh Object 第一步:载入一个网格模型对象 A Microsoft? Direct3D? application must first load a mesh before using it. The Meshes sample project loads the tiger mesh by calling InitGeometry, an application-defined function, after loading the required Direct3D objects. 一个Microsoft Direct3D的应用程式在使用网格模型对象之前必须进行初始化,本例中,调用InitGeometry函式用于载入一个老虎的网格模型,这是一个应用程式定义的函式,在载入必要的Direct3D对象(系统初始化)后调用。 A mesh needs a material buffer that will store all the materials and textures that will be used. The function starts by declaring a material buffer as shown in the following code fragment. 一个网格模型需要材质缓冲,将存储要使用的材质以及纹理。函式开始先声明一个材质缓冲如同以下的代码片段: LPD3DXBUFFER pD3DXMtrlBuffer; The following code fragment uses the D3DXLoadMeshFromX method to load the mesh. 下面这部分使用D3DXLoadMeshFromX的方法来载入网格模型。 // Load the mesh from the specified file. if( FAILED( D3DXLoadMeshFromX( "tiger.x", D3DXMESH_SYSTEMMEM, 2.4.2格网电离层模型 广域增强系统(WAAS)是由美国航空航天局为提高GPS 卫星导航系统在本地区的位置服务精度与可靠性而提出并且成功实施运行的系统,WAAS 建议采用格网电离层模型,其能够为单频接收机用户提供大范围、实时与精确的电离层延迟误差改正。 WAAS 把复杂的电离层视为距离地面约350公里的薄层,并把它作为地面站点及用户接收机共同的参考面。并将电离层参考面按55?的间隔划分成大量的网格单元。在广域增强系统的覆盖范围内分布着一定数目的基准观测站以及一个主控站,各基准观测站根据观测到的GPS 资料,实时地分离出卫星和接收机的仪器偏差与电离层延迟数据,然后提取出各电离层穿刺点处的精确垂向电离层延迟数据信息;主控站整合网络覆盖区域内所有观测基准站所有可视卫星的电离层穿刺点处的精确电离层TEC 信息,并通过一定的算法计算出电离层参考面上所有网格结点处的电离层垂向总电子含量(VTEC),建立覆盖整个网络服务区的电离层格网模型,并分析格网模型的模型精度;主控站再将所有网格结点的电离层延迟数据以一定格式生成电文经由GEO 卫星播发给服务区域内的用户,用户接收机首先计算各可视卫星穿刺点的位置坐标,根据各穿刺点落入的网格单元所对应的GEO 卫星播发的格网点电离层延迟信息,按照一定算法解算出各可视卫星伪距观测中的电离层延迟误差量[26,36-37]。 (1)网格结点电离层的解算[38] 广域增强系统主控站首先接收其网络覆盖区域内的所有观测基准站发送的实时电离层延迟误差信息,其中包括所有基准站可视卫星电离层穿刺点的位置坐标及各穿刺点的电离层VTEC 信息,然后采用距离反比例加权算法解算出WAAS 整个网络覆盖区域内的所有网格结点的VTEC 值。 距离反比例加权法是基于空间相关性原理而来的,根据距离的远近赋予不同的权重系数,即所测穿刺点距离该格点越近权重值越大,越远权重值越小,然后整合相应格网点周围四个网格内的穿刺点VTEC 信息来估算出网格结点的垂直电离层延迟误差, 如图2.1。计算公式如下: 111/00i n n ion ij j i i ij ij ion i ion ij D d DR d d D D d ==?< 划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。为建立正确、合理的有限元模型,这里介绍划分网格时应考虑的一些基本原则。 1网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。 图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。 图1位移精度和计算时间随网格数量的变化 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2网格疏密 网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。 图2是中心带圆孔方板的四分之一模型,其网格反映了疏密不同的划分原则。小圆孔附近存在应力集中,采用了比较密的网格。板的四周应力梯度较小,网格分得较稀。其中图b 中网格疏密相差更大,它比图a中的网格少48个,但计算出的孔缘最大应力相差1%,而计算时间却减小了36%。由此可见,采用疏密不同的网格划分,既可以保持相当的计算精度,又可使网格数量减小。因此,网格数量应增加到结构的关键部位,在次要部位增加网格是不必要的,也是不经济的。 NB 南京市规划局测绘标准 NJCHXXX 南京城市三维地理信息模型数据标准 (征求意见稿) 2014-12-31 发布 2015-01-01 实施 南京市规划局 发布 南京市测绘管理办公室 目录 1范围 (1) 2编制原则 (1) 2.1 先进性 (1) 2.2 可操作性 (1) 2.3 扩展性 (1) 3规范性引用文件 (1) 4术语和定义 (2) 5缩略语 (3) 6基本规定 (4) 6.1 空间参考系 (4) 6.2 时间参考系 (4) 6.3 建模单元划分 (4) 6.4 数据格式 (4) 6.5 模型数学精度 (4) 7三维地理信息模型内容及表现 (5) 7.1 模型内容 (6) 7.2 表现方式 (6) 7.3 模型分级 (7) 7.4 模型精细度 (7) 7.5 模型属性规定 (13) 7.6 元数据要求 (16) 8要素分类编码 (17) 8.1 建模单元编码 (17) 8.2 模型要素编码 (18) 9成果数据库 (21) 9.1 对象化粒度 (21) 9.2 区划级数据表结构 (21) 9.3 编制单元级数据表结构 (22) 9.4 建模单元级数据表结构 (22) 9.5 对象级数据表结构 (23) 10成果提交 (24) 10.1 成果清单 (24) 10.2 成果组织方式 (24) 前言 本标准规定了南京城市三维地理信息模型的分类、表现方式、分级、编码体系、属性结构、数据库及成果要求等内容.具体内容是:1.范围;2.编制原则;3.规范性引用文件;4.术语和定义;5.缩略语;6.基本规定;7.三维地理信息模型内容及表现;8.要素分类编码;9.成果数据库;10.成果提交。 本标准的起草规则依据GB/T 1.1—2009。 本标准由南京市规划局负责管理。 本标准编写单位、主要起草人: 主编单位:南京市规划局 参编单位: 南京市城市规划编制研究中心 南京市测绘勘察研究院有限公司 本标准主要起草人: 3 模型的网格划分 当用户点击Operation工具框中的Mesh命令按钮时,GAMBIT将打开Mesh子工具框。Mesh子工具框包含的命令按钮允许用户对于包括边界层、边、面、体积和组进行网格划分操作。 与每个Mesh子工具框命令设置相关的图标如下。 本章以下部分将详细说明与上面列举的每个命令按钮相关的命令。 3.1 边界层 3.1.1 概述 边界层确定在与边和/或者面紧邻的区域的网格节点的步长。它们用于初步控制网格密度从而控制相交区域计算模型中有效信息的数量。 示例 作为边界层应用的一个示例,考虑包括一个代表流体流过管内的圆柱的计算模型。在正常环境下,很可能在紧靠管道壁面的区域内流体速度梯度很大,而靠近管路中心很小。通 过对壁面加入一个边界层,用户可以增大靠近壁面区域的网格密度并减小靠近圆柱中心的网格密度——从而获得表征两个区域的足够的信息而不过分的增大模型中网格节点的总数。 一般参数 要确定一个边界层,用户必须设定以下信息: ?边界层附着的边或者面 ?确定边界层方向的面或者体积 ?第一列网格单元的高度 ?确定接下来每一列单元高度的扩大因子 ?确定边界层厚度的总列数 用户还可以设定生成过渡边界层——也就是说,边界层的网格节点类型随着每个后续层而变化。如果用户设定了这样一个边界层,用户必须同时设定以下信息: ?边界层过渡类型 ?过度的列数 3.1.2 边界层命令 生成边界层 Create Boundary Layer命令允许用户在一条边或者一个面附近定义网格节点步长。 要生成一个边界层,用户必须设定以下参数: ?定义 ?过渡特性 ?附着实体和方向 设定边界层定义 要定一边界层,用户必须设定两类特征: ?尺寸 ?内部连续性 ?角形状 尺寸特征包括诸如边界层列数以及第一列高度等因数。内部连续性特征确定边界层重叠在相邻边界层印记上的印记行为。角形状特征确定网格在连接边界层与附着边的Corner 或者Reversal点周围区域的网格形状。 设定尺寸特征 要设定边界层的尺寸特征,用户必须设定以下四个参数中的三个: ?第一列高度 ?增长因子 ?列数 ?总高度 上面列举的前三个参数定义如下(如图3-1): ?第一列高度(a)设定边界层附着的边或者面与网格节点第一个完整列之间的距离。 ?增长因子提供一个比例 b/a 其中b是第一和第二个完整列之间的距离,a是第一列高度。边界层中任意两列之间的距离等于前面两列之间的距离乘以增长因数。 ?列数(n)设定边界层中完整列的总数。 所有三个参数都影响边界层的总厚度(D)。 城市工程地质计算机三维建模 设计说明书 1、概述 1.1编写目的 本文档是在交流基础上,结合我们对城市工程地质计算机三维建模的理解,编写相应的实现方案而制定了本文档,目的是指导后续的软件设计和软件开发、测试。 1.2项目背景 城市工程地质计算机三维建模软件设计说明书是依据城市三维地质信息系统需求分析报告的要求编写的,它确定了城市三维地质信息系统的体系结构、数据组织和内外部数据接口,是软件详细设计和编码的基础。其主要的预期读者有该软件负责人、软件设计人员和软件编码人员。 1.3主要内容 城市工程地质计算机三维建模以实际需求为指导,并充分结合三维建模的实际情况,现阶段主要包括钻孔模拟、反距离加权地层模拟、克里金地层模拟: 钻孔模拟主要通过读取的已知的城市工程地质数据,根据已有的坐标点的属性值,模拟出该钻孔。 反距离加权地层模拟是以面模型为基础,通过已知的钻孔数据, 对每一层的钻孔进行网格化,再进行属性值插值处理,最后模型实现。 克里金地层模拟是以面模型为基础,通过已知的钻孔数据,对每一层的钻孔进行网格化,再进行属性值插值处理,最后模型实现。1.4软件框架 1.5相关术语 ?面模型 在城市工程地质计算机三维建模中常用的有面模型和体模型,本项目是采用面模型。 ?地层插值 本项目的主要内容,实现建模的具体功能。 ?IDW插值 通过对已知数据进行IDW算法处理后,并对结果进行三维显示。 ?IDW参数设置 通过此模块可以对模型中数据点大小进行设置。 ?Kriging数据结果 通过对已知数据进行Kriging算法处理后,得到处理结果,保存成全局变量存在于后台。此目的是为了方便三维显示。 ?Kriging参数设置 通过此模块可以对模型中数据点大小进行设置。 ?Kriging图形显示 对Kriging的处理数据进行三维显示。 ?钻孔显示 对已知钻孔数据进行三维显示。 2、城市工程地质计算机三维建模软件设计 2.1软件开发目的 随着计算机图形技术的不断发展和运算能力的提高,三维地质模型已经越来越多地被应用到城市环境地质评价中。三维地质模型包含大量的城市环境地质信息,不但给城市建设和管理提供数据上的支持,还能给人们提供可视化界面,帮助人们直观地了解环境地质状况。并且利用OpenGL在计算机图形方面的优势,结合MFC和OpenGL 各自的长处开发本软件。 2.3软件主要功能内容 打开:即读取钻孔数据,本软件读取的数据格式只能为excel的数三维模型轻量化技术
三维数字城市建模技术
三维模型简化
格网数字高程模型
壁面网格划分规则
三维数字城市模型制作规范总要
城市三维建模数据获取及方式研究
网格划分原则
基于球面剖分格网的矢量数据组织模型研究_关丽
网格模型
格网模型 1
网格划分的原则
城市三维地理信息模型数据标准_V3.0
3模型的网格划分解析
三维城市建模