高速列车车载智能化系统总体设计
高速列车车载智能化系统总体设计
文/仲崇成1 李鹏1 吴冬华1 张涛2
【摘 要】摘 要 随着高速列车大规模的上线运营,如何保证在复杂多变环境下高速列车的安全运行,是目前高铁领域急需解决的问题,本为以高速列车为载体,在高速列车上应用物联网、传感网等关键技术,综合分析列车电磁干扰、恶劣环境及多物理干涉等因素对智能化设备集成影响,研究高速列车车载智能化系统,开展高速列车车载智能化系统总体设计,实现高速列车运行动态信息的实时感知、处理和在途预警,并将获取的信息传送到地面数据中心,并通过零部件试验、地面组合试验等验证系统结构及合理性,为实现评估与决策、运用与管理提供数据支撑。
【期刊名称】电子技术与软件工程
【年(卷),期】2013(000)020
【总页数】2
【关键词】【关键词】智能化 高速列车 物联网 传感器
1 概述
2011年6月,举世瞩目的京沪高铁开通,新一代高速列车成功投入运营已安全运行两年多,以其优良的表现赢得了世人的赞许和认同,同时创造了世界铁路运营试验最高速486.1km/h,在速度、安全、舒适、节能等技术指标均达到了世界领先水平,已成为为引领世界高速列车发展的方向。目前,包括时速200-250公里、时速300-350公里及新一代高速列车在内的“和谐号”CRH各型动车组已累计上线运营700余列,如何在复杂多变的运行环境下保证大规模高速列车持久安全运行,是目前研究的重要方向。
高速列车本身是由4万多个零部件构成的复杂装备,目前列车网络控制系统主要进行列车运行的控制、列车设备状态的监视、故障诊断及数据存储,关键性能参数监测量少,数据分析能力偏弱,尤其是不能提供历史故障数据,不具备自学习的功能。大部分车辆故障只能在动车组回库后,通过测试、试验、检查线路的方式进行故障处理,因此,建立车载智能化系统可以对走行、牵引、制动等直接影响行车安全的关键系统与部件进行动态监控、智能诊断与在途预警,实现事故主动预防与故障快速处置,并可以通过车地无线通信系统实现车地数据传输。
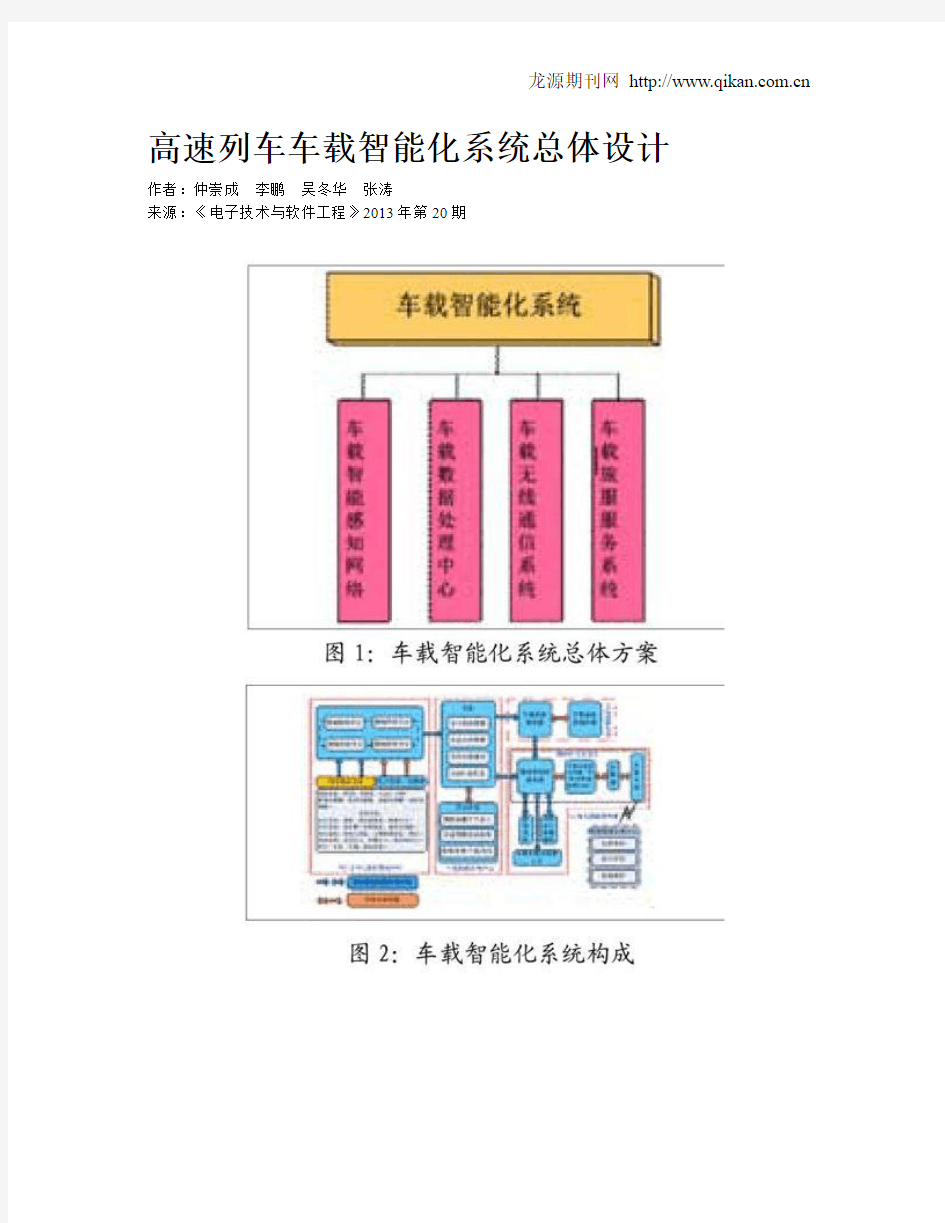
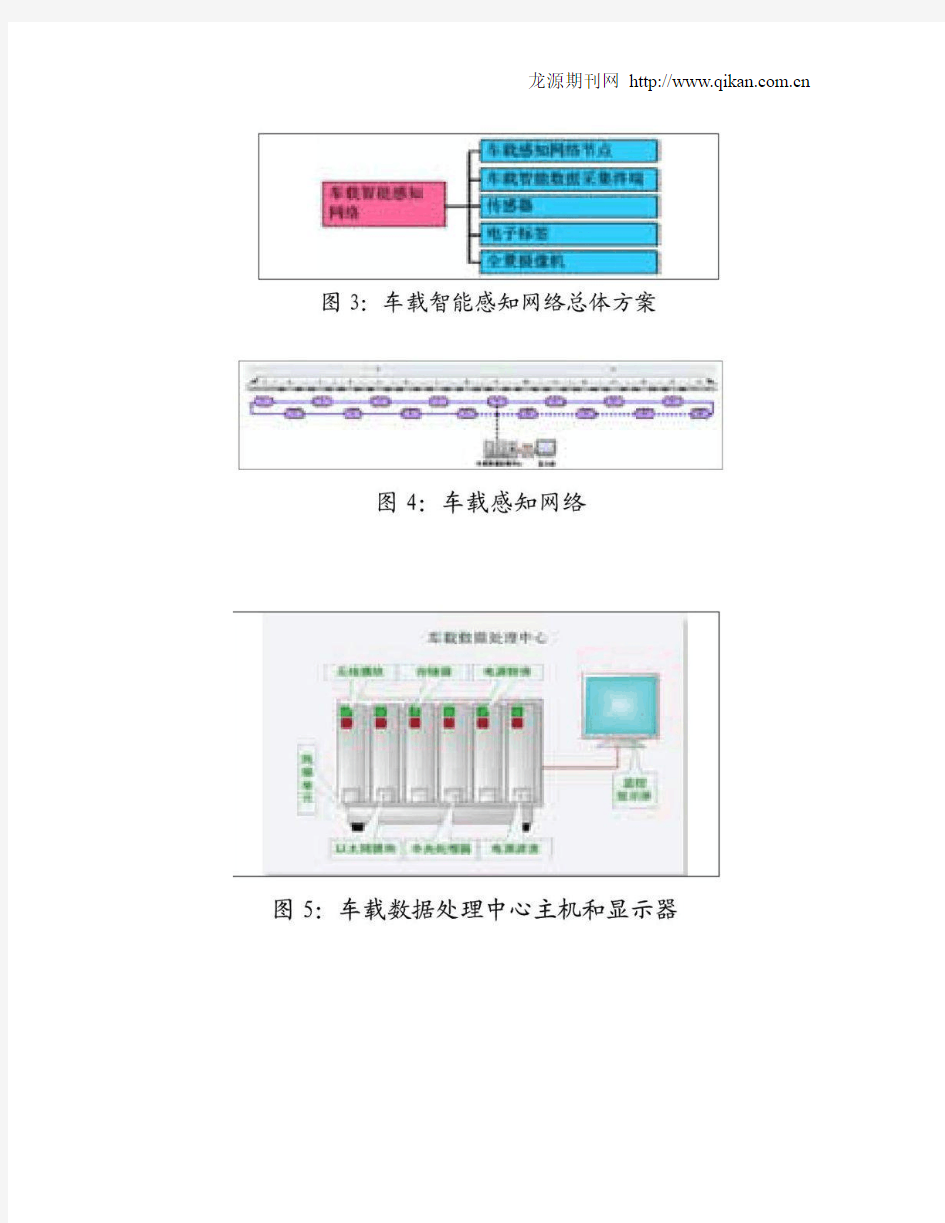
2 车载智能化系统构成
车载智能化系统是在既有高速列车网络信息控制系统基础上,集成目前流行的物联网、互联网以及车载智能传感网的多网融合系统,对列车运行状态、各关键部件进行实时、完备、准确的检测。车载智能化系统总体包括车载智能感知网络、车载数据处理中心、车载无线通信系统等系统,总体方案如图1所示,系统构成如图2所示。
CRH1型动车组列车控制系统ATP控制模式概述
CRH1型动车组列车控制系统ATP控制模式 概述 一、ATP列控系统速度防护模式 ATP列控系统共有十一种速度防护模式: (1)区间追踪运行模式。 (2)带LU2的区间追踪运行模式。 (3)机外停车模式。 (4)正线停车模式。 (5)股道停车模式。 (6)正线通过模式。 (7)经18号及以上道岔侧向通过模式。 (8)引导接车模式。 (9)正线发车模式。 (10)股道发车模式。 (11)区间反向运行模式。 二、ATP装置区间追踪运行模式在区间跟踪运行模式时,设备核对速度产生的曲线控制。
三、ATP装置带LU2的区间追踪运行模式 1.如果轨道电路信息码包含LU2(单黄码),在列车未到达LU2(单黄码)区间的情况下,是否有LU2就会不明确。 2.列卓进入了LU2(单黄码)分区后,会判明从LU2(单黄码)确定的实际停车点。重新画出新的核对速度曲线。 四、ATP装置机外停车模式 在区问内站间停车模式时的核对速度曲线。 五、ATP装置正线停车模式正线停车模式时的核对速度曲线的生成。 六、ATP装置股道停车模式 1.列车处于U2码(黄灯)区间之前的一段时间内,生成
机外停车模式曲线。 2.接收到U2码(黄灯)后,会生成形成NBP为50km的模式曲线。 3.进入列车接近的区间后,会接收UU码(双黄灯),通过进站信号机时破坏掉以前的正线Balise信息,根据进站口的Balise信息生成曲线。 4.股道停车时,在站外即使是『机控优先』通过进站信号到列车停车之间的过程自动切换到『人控优先』。正线停车时不为人控优先。 5.股道停车时收UU(双黄灯)信号后的『无信号』作为『HU』(半红半黄)信号处理。因此,在上图状态下可将TC6,TC7两个轨道电路作为一个闭塞区处理。 6.其后进入无码的区间。列车保持NBP为50km/h的限制速度。从入口的有源应答器接收应该进入的线路的数据。列车发出停止在B6的终端的核对速度图形。 7.列车进入TC7后,考虑到列车长度,在前450m保持NBP50km/h的限制速度。然后,该NBP50km/h限制被解除,曲线状的核对速度图形即有效。
高速数据传输
高速数字电路的研究与介绍 1.引言 随着计算机外部设备、计算机高速总线的发展,在这些设备上进行的数据交换以及复杂的运算导致数据传输量急剧增大,为了满足种种数据在处理器、存储介质和外围设备之间的高速交换,近年来出现了多种高速接口电路的设计和应用。 高速数据传输接口电路在计算机 memory总线,多处理器的互连,外部设备接口,高速系统背板……有着广泛的应用。普通PC机上的DDR2存储器的数据传输已可以达到667MHz。计算机外部设备、计算机网络、通信传输等设备的各种物理层设计工作大量的涉及到了:155M bps、 622M bps和 2.5G bps,100M bps,1000M bps,10G bps的高速接口电路。 现今高速数据传输接口的实现主要参考了三种标准的电路接口:PECL (Positive-referenced Emitter-Coupled Logic); LVDS (Low-Voltage Differential Signals), and CML (Current Mode Logic)。这些高速接口电路标准针对不同的应用领域提供相应的传输速率。解决高速接口电路的互连,保持低功耗及提高信号传输质量,是开发这些接口电路时需要注意的。要求为高速接口电路设计相应的外部阻抗匹配电路、耦合电路。155M bps以下速率的电路阻抗匹配要求不是很严。电路耦合可采用直流耦合,可以避免电容滤除信号的高频成分。500M bps以上的高速电路线路阻抗匹配要求严格。高速电路一般采用交流耦合,可以隔离两边的直流。 在设计高速数字传输系统时,首先需要了解每一种接口标准的输入输出电路结构,由此可以知道如何进行直流偏置和终端匹配。本文针对这三种标准的接口电路做分析和介绍: 2.PECL 接口 PECL由ECL标准发展而来,在PECL电路中省去了负电源,较ECL电路更便于使用。PECL信号的摆幅相对ECL要小,这使得该逻辑更适合于高速数据的串行或并行连接。 PECL接口输出结构 PECL电路的输出结构如图1所示,包含一个差分对管和一对射随器。输出射随 器工作在正电源范围内,其电流始终存在,这 样有利于提高开关速度。标准的输出负载是接 50欧姆电阻至VCC-2V的电平上,如图1所示, 在这种负载条件下,OUT+与OUT-的静态电平 典型值为VCC-1.3V,OUT+与OUT-输出电流为 14mA。PECL结构的输出阻抗很低,典型值为
激光雷达高速数据采集系统解决方案.pdf
激光雷达高速数据采集系统解决方案 0、引言 1、 当雷达探测到目标后, 可从回波中提取有关信息,如实现对目标的距离和空间角度定位,并由其距离和角度随时间变化的规律中得到目标位置的变化率,由此对目标实现跟踪; 雷达的测量如果能在一维或多维上有足够的分辨力, 则可得到目标尺寸和形状的信息; 采用不同的极化方法,可测量目标形状的对称性。雷达还可测定目标的表面粗糙度及介电特性等。接下来坤驰科技将为您具体介绍一下激光雷达在数据采集方面的研究。 1、雷达原理 目标标记: 目标在空间、陆地或海面上的位置, 可以用多种坐标系来表示。在雷达应用中, 测定目标坐标常采用极(球)坐标系统, 如图1.1所示。图中, 空间任一目标P所在位置可用下列三个坐标确定: 1、目标的斜距R; 2、方位角α;仰角β。 如需要知道目标的高度和水平距离, 那么利用圆柱坐标系统就比较方便。在这种系统中, 目标的位置由以下三个坐标来确定: 水平距离D,方位角α,高度H。 图1.1 用极(球)坐标系统表示目标位置
系统原理: 由雷达发射机产生的电磁能, 经收发开关后传输给天线, 再由天线将此电磁能定向辐射于大气中。电磁能在大气中以光速传播, 如果目标恰好位于定向天线的波束内, 则它将要截取一部分电磁能。目标将被截取的电磁能向各方向散射, 其中部分散射的能量朝向雷达接收方向。雷达天线搜集到这部分散射的电磁波后, 就经传输线和收发开关馈给接收机。接收机将这微弱信号放大并经信号处理后即可获取所需信息, 并将结果送至终端显示。 图1.2 雷达系统原理图 测量方法 1).目标斜距的测量 雷达工作时, 发射机经天线向空间发射一串重复周期一定的高频脉冲。如果在电磁波传播的途径上有目标存在, 那么雷达就可以接收到由目标反射回来的回波。由于回波信号往返于雷达与目标之间, 它将滞后于发射脉冲一个时间tr, 如图1.3所示。 我们知道电磁波的能量是以光速传播的, 设目标的距离为 R, 则传播的距离等于光速乘上时间间隔, 即2R=ct r 或 2 r ct R
列车运行控制系统毕业设计
列车运行控制系统 铁路通信信号系统是铁路运输的基础设施,是实现铁路统一指挥调度,保证列车运行安全、提高运输效率和质量的关键技术设备,也是铁路信息化技术的重要技术领域。 现代信息类技术的迅速发展。对铁路信号、通信产品和服务产生了重要影响。铁路通信和信号技术,以及现代铁路信息化系统之间的关系和作用变得密不可分。车站、区间和列车控制的一体化,铁路通信信号技术的相互融合,以及行车调度指挥自动化等技术,冲破了功能单一、控制分散、通信信号相对独立的传统技术理念,推动了铁路通信信号技术向数字化、智能化、网络化和一体化的方向发展。 在列车运行控制技术方面,计算机、通信、控制技术与信号技术集成为一个自动化水平很高的列车运行自动控制系统(简称列控系统)。列控系统不仅在行车安全方面提供了根本保障,而且在行车自动化控制、运营效率的提高及管理自动化等方面,提供了完善的功能,并向着运输综合自动化的方向发展。列控系统技术是现代化铁路的重要标志之一。 随着列车速度的提高,列车的运行安全除了以进路保证外,还必须以专用的安全设备,监督、强迫列车(司机)执行。这些安全设备从初级的列车自动停车装置、自动告警装置、列车速度自动监督系统(或列车速度自动检查装置)发展到列车速度自动控制系统。 列车自动控制系统(A TC)—般指系统设备(包括地面设备和车载设备),同时也是一种闭塞方式,主要包括: 1.以调度集中系统CTC为核心,综合集成为调度指挥控制中心。 2.以车站计算机联锁系统为核心,综合集成为车站控制中心。 3.以列车速度防护与控制为核心,综合集成为列车(车载)运行控制系统。 4、以移动通信(例如GSM-R)平台,构建通信信号一体化的总成系统(例如CTCS)。 列车自动控制系统(A TC)的主要功能有四项: ·检查列车在线路上的位置(列车检测)。 ·形成速度信号(调整列车间隔)。 ·向列车发送速度信号或目标距离信号(信号传输)。 ·按速度或目标距离信号控制列车制动(制动控制)。 上述一至三项功能由地面没备完成,第四项功能由车载设备完成。 本章主要内容为200km/h动车组司机驾驶所需要的列控ATP技术和GSM-R系统中的无线列调功能。 第一节列控ATP系统技术原理 一.列控ATP系统的组成与功能 列控ATP是列车超速防护和机车信号系统的一体化系统,列控ATP系统主要由车载设备及地面设备两大部分组成,地面设备与车载设备一起才能完成列车运行控制的功能。 图7.1.1是列车运行控制系统地面设备原理框图。
大众汽车车载CAN总线系统设计
大众汽车车载CAN总线系统设计 摘要:随着汽车电子技术的持续发展,汽车上越来越多的应用电子设备,电子控制设备的联系更加复杂,而汽车的传统电气系统一般都是采用点对点的单一通信,联系较少,因此,庞大的布线系统之间的联系已经无法满足逐渐复杂的汽车控制系统的要求。 本文以大众汽车车载CAN总线车身控制系统为研究对象,介绍了国际汽车电子技术的现状和发展趋势,与目前主流的汽车网络技术相比,本文分析了目前流行的现场总线的性能及特点,研究了CAN总线的汽车车身控制系统。介绍了系统的硬件设计和开发过程。说明了每个节点的作用,说明了每个模块硬件电路结构。介绍了系统的软件设计和开发过程。该论文讲述了CAN通信模块的通信流程。通过本设计,大众汽车车载CAN 总线车身控制系统可以满足现代车身控制的需要。 关键词:车载网络;大众汽车车载CAN总线;车身控制系统
Volkswagen car CAN bus system design Abstract: with the continuous development of automobile electronic technology, more and more electronic equipment used in automobile, electronic control equipment is more and more complex, the relation between the traditional auto electrical system is mostly single point to point communication, connect with each other very few, so lead to the connection between the huge wiring system has far cannot satisfy the requirement of increasingly complex auto control system. Automobile LAN CAN bus, which are widely used in automotive electronic control system, in order to realize intelligent and networked control part provides effective ways and methods. This topic with CAN bus body control system as the research object, mainly to do the summary of a few aspects: introduce the current status and development trend of international automotive electronics technology, more mainstream in today's automotive network technology, a comprehensive analysis of the current popular features and performance of a variety of field bus, the further study of the CAN bus car body control system. Describes the hardware design and development of the system. According to the actual needs of the system, the design of each module of the system is determined. Detailed introduces the system function of each control node, describes the main control chip peripheral circuit, light control circuit, CAN communication module circuit, wiper control circuit, control circuit, window lock motor control circuit, the switch quantity detection circuit, electric rearview mirror control circuit hardware circuit for each module of the structure. Describes the software design and development process of the system. This article introduces the communication process for the CAN communication module. Key words: car network; vw vehicle CAN bus; Body control system;
CRA型动车组和CRA型动车组列车网络控制系统的技术特点
CRH2A型动车组和CRH1A型动车组列车网络控制系统的技术特点 一、CRH2A型动车组网络控制系统: 1、网络控制概述: CRH2动车组列车网络控制系统采用贯穿全车的总线来传送信息,从而减轻了列车的重量,并且通过对列车运行以及车载设备动作的运行信息进行集中管理,可以有效地实现对司机和乘务员的辅助作用,加强对设备的保养和提高对乘客的服务质量。 2、网络控制系统的组成: CRH2动车组列车网络控制系统由监控器和控制传输部分两部分组成。硬件一体化装置,但各自独立构成网络,系统为自律分散型。 控制传输部分为双重系统,确保系统的冗余性。通信采用ARCNET网络标准。头车设置的中央装置为双重系统构成,确保其可靠性。前后中心的控制单元采用母线仲裁。 CRH动车组网络控制系统中引用额车载信息装置和类车信息终端装置构成,同时还有监控显示器以及显示控制器、车内信息显示器、IC读卡器等附属设施。 3、网络控制系统的功能: 1)牵引、制动指令传输; 2)设备启动、关闭指令的传输;3)显示灯/蜂鸣器控制指令传输;4)乘务员支持信息传输;5)服务设备控制信息传输;6)数据记录功能;7)车上试验;8)自我诊断传送线;9)远程装载功能;10)列车信息装置的自我诊断功能;11)信息显示功能。 4、网络控制系统的拓扑结构: CRH2动车组网络控制系统采用列车和车辆两级网络结构。列车网络为连接编组各车辆的通信网络,以列车运行控制为目的,以光纤和双绞线为传输介质,连接各中央装置和终端装置,采用双重环结构。车辆级网络结构为连接车厢内设备的通信网络,主要传输介质为光纤和电流环传输线。 1)列车总线 列车总线有两种类型:其一为列车信息传输线,以光纤为传输介质,连接所有中央装置和终端装置,采用ARCNET协议,传送速度为2.5Mb/s;其二为自我诊断传输网,以双绞线作为传输介质,连接中央装置和终端装置,采用HLC作为通信协议。 列车总线的设备由中央装置、终端装置、显示器、显示控制装置、IC卡架以及车内信息显示器构成。在光纤网中,中央装置和终端装置由双重环形构成的光纤连接,采用不易发生故障的双向环形网络方式。它具有向左和向右两条线路,是一种分散型的系统。如果在一个方向的环绕中检测到没有应答的情况,就向另一个方向的环绕传送,即使在2处以上的线路发生故障,环路网络断开时,也可以继续有其他连接着的正常线路进行传送,避开故障部位。 2)车辆总线: 车辆总线是指中央装置/终端装置与车辆内设备之间信息交换通道。各车的中央/终端装置与车辆设备之间的接口以光传送、电流环传送,DIO等形式传送,他们构成信息网络节点与车载设备的联系通道,车载设备与网络控制系统节点之间爱用点对点通信方式,有多种通信规格,总结如下: 终端装置——设备(牵引变流器/制动控制装置)之间的传送: ①通过点对点连接进行的光纤2线式半双工传送; ②轮询方式; ATC检查记录部和车内引导显示器、空调显示器、自动播放装置、辅助电源装置—监视器部之间的传送。
车载总线分类及应用
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 车载总线分类及应用 车载总线分类及应用总线分为: 外部总线,内部总线,系统总线。 系统总线包括: 地址总线,数据总线,控制总线汽车的各种操纵系统正向电子化、自动化方向发展,在未来的 5~10 年里,传统的汽车机械操纵系统将变成通过高速容错通信总线与高性能 CPU 相连的电气系统。 如汽车将采用电气马达和电控信号来实现线控驾驶、线控制动、线控油门和线控悬架等,采用这些线控系统将完全取代现有系统中的液压和机械控制。 在新一代雅阁 V6 轿车上采用的 DBW 就是新技术之一。 DBW 是线控油门的英文缩写,也可称之为电控油门,即发动机的油门是通过电子控制的。 传统的油门控制方式是驾驶员通过踩油门踏板,由油门拉索直接控制发动机油门的开合程度,从而决定加速或减速,驾驶员的动作与油门动作之间是通过拉索的机械作用联系的。 而DBW 将这种机械联系改为电子联系。 驾驶员仍然通过踩油门踏板控制拉索。 但拉索并不是直接连接到油门,而是连着一个油门踏板位置传感器,传感器将拉索的位置变化转化为电信号传送至汽车的大脑 1 / 7
ECU(电子控制器) , ECU 将收集到的相关传感器信号经过处理后发送命令至油门作动器控制模块,油门作动器控制模块再发送信号给油门作动器,从而控制油门的开合程度。 也就是说驾驶员的动作与油门的动作之间是通过电子元件的电信号联系的。 虽然从构造上来看, DBW 比传统油门控制方式复杂,但油门的控制却比传统方式精确,发动机能够根据汽车的各种行驶信息,精确调节进入汽缸的燃油空气混合气,改善发动机的燃烧状况,从而大大提高了汽车的动力性和经济性。 使用线控技术的优点很多,比如使用线控制动无需制动液,保护生态,减少维护;质量轻;性能高(制动响应快) ;制动磨最小(向轮胎施力更均匀) ;安装测试更简单快捷(模块结构) ;更稳固的电子接口;隔板间无机械联系;简单布置就能增加电子控制功能;踏板特性一致;比液压系统的元件更少等。 2. CAN 总线网络随着电控单元在汽车中的应用越来越多,车载电子设备间的数据通信变得越来越重要,以分布式控制系统为基础构造汽车车载电子网络系统是很有必要的。 大量数据的快速交换、高可靠性及廉价性是对汽车电子网络系统的要求。 在该网络系统中,各处理机独立运行,控制改善汽车某一方面的性能,同时在其它处理机需要时提供数据服务。 汽车内部网络的构成主要依靠总线传输技术。
CRH1型动车组列车控制系统概述
CRH1型动车组列车控制系统概述 一、ATC列车运行自动控制系统概述。 1.是对列车运行全过程或一部分作业实现自动控制的系统。 2.其特征为:列车通过获取的地面信息和命令,控制列车运行,并调整与前行列车之间必须保持的距离。 3.列车运行自动控制系统(简称列控系统)是保证列车按照空间间隔制运行的技术方法,它是靠控制列车运行速度的方式来实现的。 4.列车运行自动控制系统ATC包括三个子系统: (1)ATP列车超速防护系统。 (2)ATO列车自动驾驶系统。 (3)ATS列车自动监控系统。 二、列车运行自动控制系统的控制原理 1.采用速度一距离模式曲线控制,不再对每一个闭塞分
区规定一个目标速度,而是向列车传送目标速度、列车距目标的距离(和TVM430不一样,它可以包括多个闭塞分区的长度)的信息。 2.列车实行一次制动控制方式。列车追踪间隔可以根据列车制动性能、车速、线路条件调整,可以提高混跑线路的通过能力。 3.速度一距离模式曲线控制实现了一次制动方式,列控车载设备为智能型设备,它根据目标速度、目标距离、线路条件、列车性能生成的目标一距离模式曲线进行连续制动,缩短了运行问隔,提高了运输效率,增加了旅行舒适度。 4.为了实现这一方式,地面设备必须向列车发送前方列车的位置、限速条件等动态数据,以及线路条件等固定数据,地面设备以数据编码向列车传送信息,信息量明显增加,可靠性高。 三、列控系统的基本功能 1.列控系统是在传统闭塞基础上增加列车自动控制功能的信号防护系统,由地面设备和车载设备组成。 2.列控系统包含专门设计的满足信号安全要求的模块和功能,附加功能和舒适性功能不要求安全设计。 四、车载设备功能 1.开口速度计算;测速测距;列车定位。 2.行车许可及限制速度的监督和显示。
一种两线双向高速串行音频数据传输总线控制器的实现方法
http ://https://www.360docs.net/doc/4711063252.html, 一种两线双向高速串行音频数据传输总线控制器的实现方法 瞿军武, 薛骏,施彦(无锡中感微电子股份有限公司,江苏无锡,214135) 摘要:本文提出了一种两线双向高速串行音频数据传输总线控制器在蓝牙耳机硬件系统中的应用, 可以实现芯片间高速传输数据,实现同步发送和接收音频数据以及命令字。同时, 通过自定义数据格式,优化了数据格式,并降低了数据发送和接收的复杂度。考虑到PAD 的承受能力,目前传输速率最大可 以达到18Mb/s 。仅使用两线完成了数据的传输, 从而大大减少了芯片IO 的使用。关键字:蓝牙耳机;两线双向;高速;串行总线控制器;IO ;FPGA A Realization Method of Two-wire Bidirectional High Speed Serial Audio Data Transmission Bus Controller QU Jun-wu,XUE Jun ,SHI Yan (Zgmicro co,.ltd,Wuxi 214135,China ) Abstract:This paper proposes a two-wire bidirectional high-speed serial audio data transmission bus controller applied in Bluetooth headset hardware system,which can realize high-speed data transmission between chips,synchronous transmission and reception of audio data and command words.By the self-defined data format,the data format is optimized and the complexity of data sending and receiving is reduced.Considering the bearing capacity of PAD,the maximum transmission rate can reach 18Mb/s at present.Only two lines are used to complete data transmission,which greatly reduces the use of IO on chip. Key words:Bluetooth headset;two-wire bidirectional;high-speed;serial bus controller;IO;FPGA 55
中国列车运行控制系统-ctcs系统
中国列车运行控制系统 CTCS- Chinese Train Control System CTCS概述 地面子系统可由以下部分组成:应答器、轨道电路、无线通信网络(GSM-R)、列车控制中心(TCC)/无线闭塞中心(RBC)。其中GSM-R不属于CTCS设备,但是重要组成部分。 应答器是一种能向车载子系统发送报文信息的传输设备,既可以传送固定信息,也可连接轨旁单元传送可变信息。 轨道电路具有轨道占用检查、沿轨道连续传送地车信息功能,应采用UM系列轨道电路或数字轨道电路。 无线通信网络(GSM-R)是用于车载子系统和列车控制中心进行双向信息传输的车地通信系统。 列车控制中心是基于安全计算机的控制系统,它根据地面子系统或来自外部地面系统的信息,如轨道占用信息、联锁状态等产生列车行车许可命令,并通过车地信息传输系统传输给车载子系统,保证列车控制中心管辖内列车的运行安全。 车载子系统可由以下部分组成:CTCS车载设备、无线系统车载模块。 CTCS车载设备是基于安全计算机的控制系统,通过与地面子系统交换信息来控制列车运行。 无线系统车载模块用于车载子系统和列车控制中心进行双向信息交换。 CTCS - 简介 TDCS是铁路调度指挥信息管理系统,主要完成调度指挥信息的记录、分析、车次号校核、自动报点、正晚点统计、运行图自动绘制、调度命令及计划的下达、行车日志自动生成等功能,还句话说就是原来行车调度员和车站值班员需要用笔记下的东西现在都可以由TDCS自动完成。 中国铁路调度指挥系统
参考欧洲ETCS规范,中国逐步形成了自己的CTCS(Chinese Train Control System)标准体系。如何吸收ETCS规范并结合中国国情更好地再创新,是值得深入研究的课题。 铁路是国民经济的大动脉,是中国社会和经济发展的先行产业,是社会的基础设施,铁路运输部门又是国民经济中的一个重要部门,它肩负着国民经济各种物资运输的重任,对中国社会主义建设事业的发展有着举足轻重的作用。为了满足国民对铁路运输的要求,进入二十一世纪以后,铁路部门致力于高速铁路和客运专线的建设,并取得了骄人的成绩。 为了适应中国高速铁路、客运专线的迅速发展和保证铁路运输安全的需要,铁道部有关部门研制成功了“CTCS系统”(即:铁路列车控制系统,是Chinese Train Control System的缩写“CTCS”) CTCS - 产生背景 由于早期欧洲铁路的列车运行控制系统种类繁多,且各国信号制式复杂、互不兼容,为有效解决各种列车控制系统之间的兼容性问题,保证高速列车在欧洲铁路网内跨线、跨国互通运行,1982年12月欧洲运输部长会议做出决定,就欧洲大陆铁路互联互通中的技术问题寻找解决方案。 2001年欧盟通过立法形式确定ETCS(European Train Control System)为强制性技术规范。ETCS的主要目标是互通互用、安全高效、降低成本、扩展市场,在规范的设计上融入了欧洲各主要列控系统的功能,制定了比较丰富的互联互通接口。经过长期的发展,ETCS系统目前已经比较成熟,得到了欧洲各国铁路公司和供货商的广泛认可。 中国人口密集,资源紧张,城市化发展非常迅速。一直处于发展中的中国铁路,始终存在着运量与运能之间的突出矛盾。铁路运输至今仍相当程度地制约着国民经济的快速发展,铁路仍是我国国民经济发展中的一个薄弱环节。为了缓解铁路运输的压力,铁路部门先后实行了六次大提速。 与此同时,高速铁路的蓬勃发展,对铁路的中枢神经——信号系统也提出了新的技术要求。但由于历史及技术原因,中国铁路存在多种信号系统,严重影响了运输效率。铁路信号系统迫切需要建立统一的技术标准,确立数字化、网络化、智能化、一体化发展方向,国产高速铁路列车运行控制系统标准的制定迫在眉睫。为实现高铁战略,铁道部组织相关专家开始制定适合我国国情的中国列车控制系统CTCS(Chinese Train Control System)。 在CTCS 技术规范中,根据系统配置CTCS按功能可划分为5 级。为满足客运专线和高速铁路建设需求,通过对ETCS标准的引进、消化、吸收,并结合成功应用的CTCS-2级列车运行控制系统的建设和运营经验,我国构建了具有自主知识产权的CTCS-3级列控系统标准。CTCS-3级列车运行控制系统是基于GSM-R无线通信的重要技术装备,是中国铁路技术体系和装备
CRHA型动车组和CRHA型动车组列车网络控制系统的技术特点
C R H A型动车组和 C R H A型动车组列车网络控制系统的技术特点公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
CRH2A型动车组和CRH1A型动车组列车网络控制系统的技术特点 一、CRH2A型动车组网络控制系统: 1、网络控制概述: CRH2动车组列车网络控制系统采用贯穿全车的总线来传送信息,从而减轻了列车的重量,并且通过对列车运行以及车载设备动作的运行信息进行集中管理,可以有效地实现对司机和乘务员的辅助作用,加强对设备的保养和提高对乘客的服务质量。 2、网络控制系统的组成: CRH2动车组列车网络控制系统由监控器和控制传输部分两部分组成。硬件一体化装置,但各自独立构成网络,系统为自律分散型。 控制传输部分为双重系统,确保系统的冗余性。通信采用ARCNET网络标准。头车设置的中央装置为双重系统构成,确保其可靠性。前后中心的控制单元采用母线仲裁。 CRH动车组网络控制系统中引用额车载信息装置和类车信息终端装置构成,同时还有监控显示器以及显示控制器、车内信息显示器、IC读卡器等附属设施。 3、网络控制系统的功能: 1)牵引、制动指令传输; 2)设备启动、关闭指令的传输;3)显示灯/蜂鸣器控制指令传输;4)乘务员支持信息传输;5)服务设备控制信息传输;6)数据记录功能;7)车上试验;8)自我诊断传送线;9)远程装载功能;10)列车信息装置的自我诊断功能;11)信息显示功能。
4、网络控制系统的拓扑结构: CRH2动车组网络控制系统采用列车和车辆两级网络结构。列车网络为连接编组各车辆的通信网络,以列车运行控制为目的,以光纤和双绞线为传输介质,连接各中央装置和终端装置,采用双重环结构。车辆级网络结构为连接车厢内设备的通信网络,主要传输介质为光纤和电流环传输线。 1)列车总线 列车总线有两种类型:其一为列车信息传输线,以光纤为传输介质,连接所有中央装置和终端装置,采用ARCNET协议,传送速度为 2.5Mb/s;其二为自我诊断传输网,以双绞线作为传输介质,连接中央装置和终端装置,采用HLC作为通信协议。 列车总线的设备由中央装置、终端装置、显示器、显示控制装置、IC卡架以及车内信息显示器构成。在光纤网中,中央装置和终端装置由双重环形构成的光纤连接,采用不易发生故障的双向环形网络方式。它具有向左和向右两条线路,是一种分散型的系统。如果在一个方向的环绕中检测到没有应答的情况,就向另一个方向的环绕传送,即使在2处以上的线路发生故障,环路网络断开时,也可以继续有其他连接着的正常线路进行传送,避开故障部位。 2)车辆总线: 车辆总线是指中央装置/终端装置与车辆内设备之间信息交换通道。各车的中央/终端装置与车辆设备之间的接口以光传送、电流环传送,DIO等形式传送,他们构成信息网络节点与车载设备的联系通道,车
UTMI及USB 2.0 PHY高速传输特性分析
UTMI及USB 2.0 PHY高速传输特性分析 1. 概述 USB2.0利用传输时序的缩短(微帧125us)以及相关的传输技术,将整个传输速度从原来的 12Mbps提高到480Mbps,提高了40倍的带宽,为开发高宽带USB接口产品提供条件。 USB2.0支持USB1.1的全速(Full Speed)和低速(Low Speed)工作环境,其电气特性在其他 文献中有描述[6],这里主要介绍USB2.0高速设备的电气特性以及相关的UTMI接口规范。UTMI全称为 USB2.0 Transceiver Macrocell Interface,此协议是针对USB2.0的信号特点进行定 义的,分为8位或16位数据接口。目的是为了减少开发商的工作量,缩短产品的设计周期,降 低风险。此接口模块主要是处理物理底层的USB协议及信号,可与SIE整合设计成一专用 ASIC芯片,也可独立作为PHY的收发器芯片,下以8位接口为例介绍PHY的工作原理及设计 特点。 2. UTMI主要功能及原理 首先,为保证兼容性,PHY应该支持全速和高速工作模式。为此高速集线器(Root Hub或Hub)需要能够检测设备是高速端口还是全速端口,以作相应的速度模式进行工作。因此,信号接口 须实现以下功能: l 不同速率接口之间的动态传输 l 高速设备检测(HighSpeed Detection Handshake) l 高速设备断开检测(HS_Disconnect) l 能传输高速/全速差分信号(要求阻抗匹配) l 发送和检测高速包开始信号(SYNC) l 发送和检测高速包结束信号(EOP) l NRZI编码和位填充(Bit Stuff / Bit Unstuff) l 支持挂起和复位的操作 图1 USB2.0 PHY 功能模块描述框图 图1描述了UTMI各个功能模块,其工作原理如下:PHY从其他转态(如上电、重启或挂起) 转换成工作状态后,首先进行高速设备的连接检测(HS Detection Handshake)(后面再详细叙述),检测完毕后切换成相应的工作模式,然后等待主机和设备进行传输数据流。当接收器在USB数据线D+和D-检测到由主机发送到设备的信号时,首先对信号进行时钟恢复,得到正 确同步信号后再送进缓冲区,通过NRZI解码及位反填充后,把串行信号转换成并行信号,最 后送到设备SIE进行处理。反之,当设备端的SIE需要发送数据包时,UTMI将按照相反的顺 序把已编译好的NRZI串行数据流通过发送器传输给主机。为了降低功耗,UTMI支持挂起功能,其工作状态如图2所示。
列车运行控制系统
列车运行控制系统
列车运行控制系统 -03-25 14:52:17| 分类:铁路基础知识 | 标签: |字号大中小订阅 根据列车在铁路线路上运行的客观条件和实际情况,对列车运行速度及制动方式等状态进行监督、控制和调整的技术装备。系统包括地面与车载两部分,地面设备产生出列车控制所需要的全部基础数据,例如列车的运行速度、间隔时分等;车载设备经过媒体将地面传来的信号进行信息处理,形成列车速度控制数据及列车制动模式,用来监督或控制列车安全运行。系统改变了传统的信号控制方式,能够连续、实时地监督列车的运行速度,自动控制列车的制动系统,实现列车的超速防护。列车控制方式能够由人工驾驶,也可由设备实行自动控制,使列车根据其本身性能条件自动调整追踪间隔,提高线路的经过能力。 新一代铁路信号设备是由列车调度控制系统及列车运行控制系统两大部分组成的。从技术发展的趋势看是向着数字化、网络化、自动化与智能化的方向发展。它的作用是保证行车安全、提高运输效率、节省能源、改进员工劳动条件。 发展中的列车控制系统将成为一个集列车运行控制、行车调度指挥、信息管理和设备监测为一体的综合业务管理的自动化系统。
列车运行控制系统的内容是随着技术发展而提高的,从初级阶段的机车信号与自动停车装置,发展到列车速度监督系统与列车自动操纵系统。 进入20世纪90年代,世界上已有许多国家开发了各自的列车运行控制系统,其中,在技术上具有代表性且已投入使用的主要有:德国的LZB系统,法国的VM300和TVM430系统,日本新干线的ATC系统等。这些系统的共同特点是:能够实现自动连续监督列车运行速度,可靠地防止人为错误操作所造成的恶性事故的发生,保证列车的高速安全运行。它们之间的主要区别体现在控制方式、制动模式及信息传输等形式方面。 中国近几年来,对国外列车控制系统进行了较深入的研究,对列车控制模式、轨道电路信息传输、轨道电缆信息传输等方面都已取得不少的成果。在开发过程中,还可借鉴欧洲列车控制系统“功能叠加”、“滚动衔接”的经验,从保证基本安全着手,分步完成并真正达到安全、高效、舒适的目标。 中国列车运行控制系统(CTCS)介绍 CTCS CTCS是(Chinese Train Control System)的英文缩写,中文意为中国列车运行控制系统。CTCS概述
DSP及PC机的PCI总线高速数据传输
DSP与PC机的PCI总线高速数据传输 摘要:介绍了TI公司的高性能浮点式数字信号处理芯片TMS320C6713的接口信号及控制寄存器,并在此基础上,指出了该DSP通过PCI总线与PC机进行高速数据传输的实现方法,同时给出了TMS320C6713和PC机通过PCI9052总线接口芯片实现接口的硬件原理图。 关键词:DSP;数据传输;TMS320C6713 PCI9052 TMS320C6713是TI公司在TMS320C6711的基础上推出的C6000系列新一代浮点DSP芯片,它是目前为止C6000系列DSP芯片中性能最高的一种。TMS320C6713可在255MHz的时钟频率下实现1800MIPS/1350MFLOPS的定点和浮点运算,因而可极大地满足通信、雷达、数字电视等高科技领域对信号处理实时性的要求。同时其主机口(HPI)可灵活地和PCI总线控制器相连接。而PC机则可通过PCI总线控制器直接访问TMS320C6713的存储空间和外围设备,从而实现PC机与TMS320C6713之间的高速数据传输。 在TMS320C6713DSP与PC机实现高速数据传输的方案中,可选用PLX公司的PCI9052作为两者之间的接口;同时选用PLX公司的NM93CS46作为加载PCI9052配置信息的串行EEPROM;而用TI公司的SN74CBTD3384作为PCI9052与TMS320C6713HPI之间的电平转换芯片。 1TMS320C6713的HPI简介 1.1TMS320C6713HPI的接口信号 TMS320C6713的HPI是一个16位宽的并行端口。主机(上位机)掌管着该端口的主控权,可通过HPI直接访问TMS320C6713的存储空间和外围设备。表1给出了TMS320C6713HPI接口信号的基本特征。下面对它们的具体工作方式进行说明: HD[15:0]:可以用作数据和地址的共用总线,通过HD[15:0]传送的数据包括控制寄存器的设置值、初始化的访问地址以及要传输的数据。
基于通信的列车控制系统
基于通信的列车控制系统(CBTC) 【引导案例】 目前,在新建地铁信号系统的方案选择上,采用CBTC无线AP (无线接入点)接入方式的线路已越来越多。采用AP接入,具有成本较低、通信带宽高、可部 分使用商用设备、安装调试方案灵活和施工时间短等优点。现在我国在建或改 造的地铁线路中,采用无线AP接入的有北京地铁4号线、l0号线和深圳地铁2号 线等。欧洲ETCS计划,为了实现欧洲铁路互联互通,车载设备采用ETCS总线, 可以灵活地支持与各种传统设备及E TCS车载设备的通信;传输设备有欧洲应答器和欧洲环路,即数据传输速率为565kb/s的磁应答器和采用漏泄电缆的环路; 欧洲无线也在进行工程实施。ERTMS系统是为了适应欧洲铁路互联互通的目的,它集联锁、列控和运行管理于一体。西班牙的马德里—巴塞罗拿线采用该系统,列控系统符合欧洲铁路统一标准ETCS二级标准,速度监控方式采用一次连续速 度曲线控制模式(又称目标距离一次制动模式曲线方式),列车占用靠UM2000 轨道电路,列车定位靠欧洲应答器,车与地双向传输靠无线数传。 在城市轨道交通中,基于通信的列车控制系统CBTC(Communication Based Train Contrl)是一种采用先进的通信、计算机、控制技术相结合的列车控制系统。相对于固定闭塞而言又把它称为移动闭塞。移动闭塞是目前线路能力利用 效率更高的列车闭塞方式。与固定闭塞方式相比,移动闭塞相当于将区间分成 了无数个细小的、连续的闭塞分区,它使得列车间的安全信息传递得更为频繁、及时和详细。因为移动闭塞系统能够比固定闭塞更优地确定列车的位置和传输 列车信息,所以移动闭塞系统可以根据列车的动态运行确定更小的列车间隔。 同样,取消固定闭塞所需的轨道设备也可以减少维修费用,并且利用列车和路 边设备的传输信息通道也可以传输与列车实时运行有关的操纵信息,以提高管 理能力和诊断故障设备。因此,采用移动闭塞系统能够更好地满足铁路的需要。 典型的基于通信的列车控制系统(CBTC)的结构框图如图5-1所示。由图可
CRA型动车组和CRA型动车组列车网络控制系统的技术特点
C R A型动车组和C R A型动车组列车网络控制系 统的技术特点 Document number:BGCG-0857-BTDO-0089-2022
CRH2A型动车组和CRH1A型动车组列车网络控制系统的技术特点 一、CRH2A型动车组网络控制系统: 1、网络控制概述: CRH2动车组列车网络控制系统采用贯穿全车的总线来传送信息,从而减轻了列车的重量,并且通过对列车运行以及车载设备动作的运行信息进行集中管理,可以有效地实现对司机和乘务员的辅助作用,加强对设备的保养和提高对乘客的服务质量。 2、网络控制系统的组成: CRH2动车组列车网络控制系统由监控器和控制传输部分两部分组成。硬件一体化装置,但各自独立构成网络,系统为自律分散型。 控制传输部分为双重系统,确保系统的冗余性。通信采用ARCNET网络标准。头车设置的中央装置为双重系统构成,确保其可靠性。前后中心的控制单元采用母线仲裁。 CRH动车组网络控制系统中引用额车载信息装置和类车信息终端装置构成,同时还有监控显示器以及显示控制器、车内信息显示器、IC读卡器等附属设施。 3、网络控制系统的功能: 1)牵引、制动指令传输; 2)设备启动、关闭指令的传输;3)显示灯/蜂鸣器控制指令传输;4)乘务员支持信息传输;5)服务设备控制信息传输;6)数据记录功能;7)车上试验;8)自我诊断传送线;9)远程装载功能;10)列车信息装置的自我诊断功能;11)信息显示功能。 4、网络控制系统的拓扑结构:
CRH2动车组网络控制系统采用列车和车辆两级网络结构。列车网络为连接编组各车辆的通信网络,以列车运行控制为目的,以光纤和双绞线为传输介质,连接各中央装置和终端装置,采用双重环结构。车辆级网络结构为连接车厢内设备的通信网络,主要传输介质为光纤和电流环传输线。 1)列车总线 列车总线有两种类型:其一为列车信息传输线,以光纤为传输介质,连接所有中央装置和终端装置,采用ARCNET协议,传送速度为 2.5Mb/s;其二为自我诊断传输网,以双绞线作为传输介质,连接中央装置和终端装置,采用HLC作为通信协议。 列车总线的设备由中央装置、终端装置、显示器、显示控制装置、IC卡架以及车内信息显示器构成。在光纤网中,中央装置和终端装置由双重环形构成的光纤连接,采用不易发生故障的双向环形网络方式。它具有向左和向右两条线路,是一种分散型的系统。如果在一个方向的环绕中检测到没有应答的情况,就向另一个方向的环绕传送,即使在2处以上的线路发生故障,环路网络断开时,也可以继续有其他连接着的正常线路进行传送,避开故障部位。 2)车辆总线: 车辆总线是指中央装置/终端装置与车辆内设备之间信息交换通道。各车的中央/终端装置与车辆设备之间的接口以光传送、电流环传送,DIO等形式传送,他们构成信息网络节点与车载设备的联系通道,车