车载捷联惯导系统基本原理
车载捷联惯导系统基本原理
一、捷联惯导系统基本原理
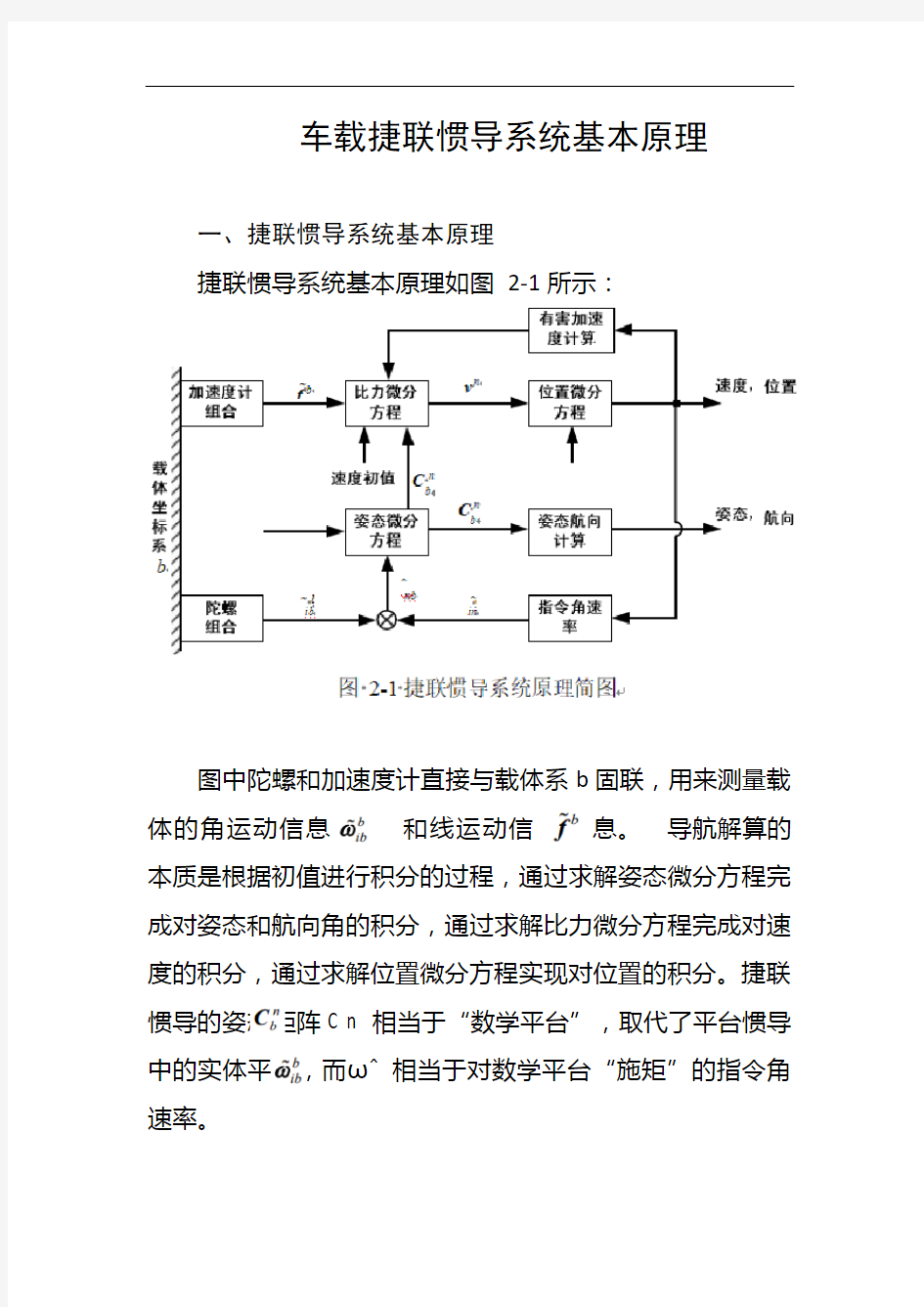
捷联惯导系统基本原理如图2-1所示:
图中陀螺和加速度计直接与载体系b固联,用来测量载体的角运动信息和线运动信息。导航解算的本质是根据初值进行积分的过程,通过求解姿态微分方程完成对姿态和航向角的积分,通过求解比力微分方程完成对速度的积分,通过求解位置微分方程实现对位置的积分。捷联惯导的姿态矩阵C n 相当于“数学平台”,取代了平台惯导中的实体平台,而ω?相当于对数学平台“施矩”的指令角速率。
二、捷联惯导微分方程
(一)姿态微分方程
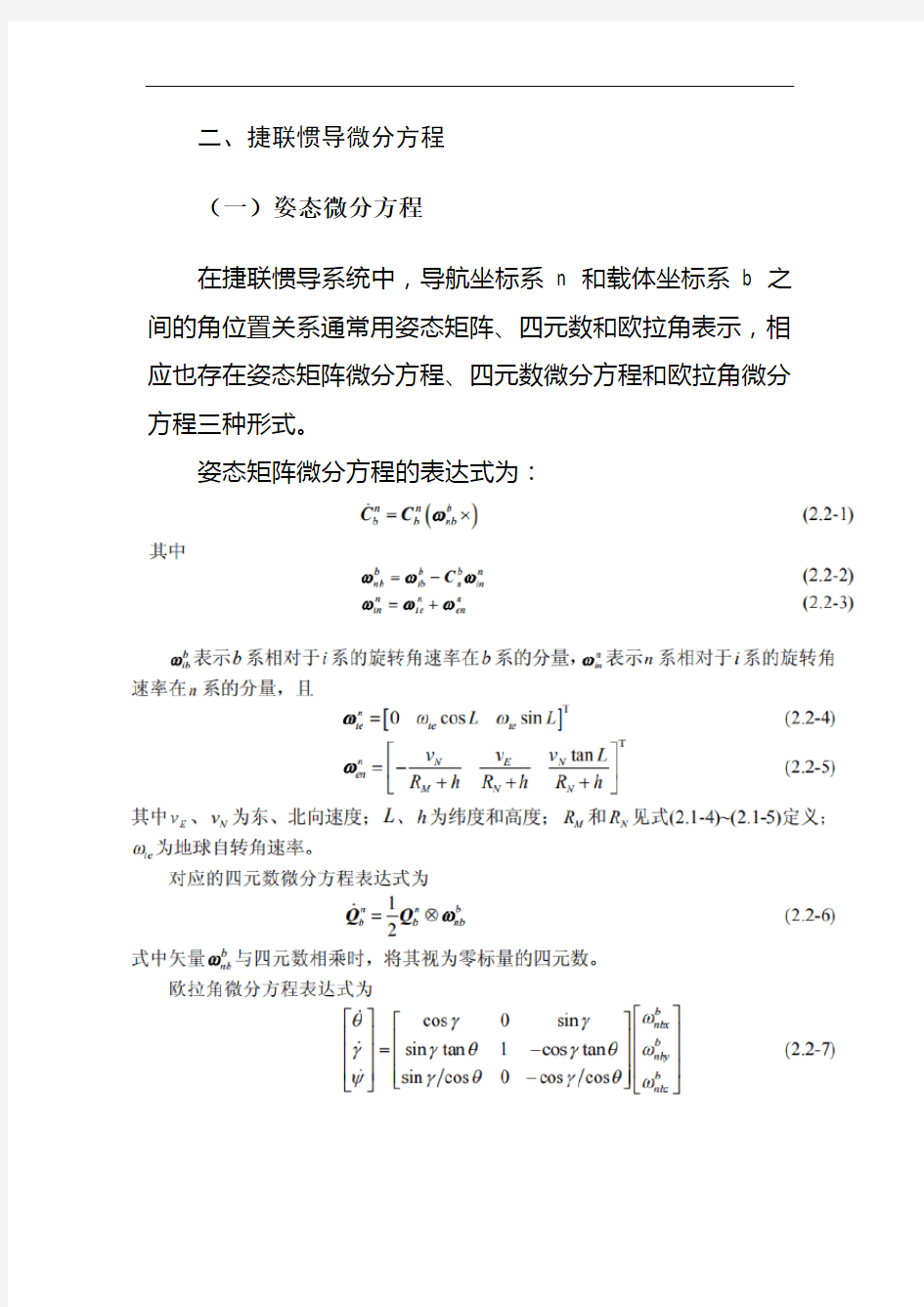
在捷联惯导系统中,导航坐标系n 和载体坐标系b 之间的角位置关系通常用姿态矩阵、四元数和欧拉角表示,相应也存在姿态矩阵微分方程、四元数微分方程和欧拉角微分方程三种形式。
姿态矩阵微分方程的表达式为:
在欧拉角微分方程式(2.2-7)中,当俯仰角θ趋于90o时,cosθ趋于0,tanθ趋于无穷,方程存在奇异性,所以这种方法不能在全姿态范围内正常工作;姿态矩阵微分方程式(2.2-1)可全姿态工作,但姿态矩阵更新相当于求解包含9个未知量的线性微分方程组,计算量大;四元数微分方程式(2.2-6)同样可以全姿态工作,且更新算法只需求解4个未知量的线性微分方程组,计算量小,算法简单,是较实用的工程算法。
(二)速度微分方程
速度微分方程即比力方程,是惯性导航解算的基本关系式:
三、捷联惯性导航算法
捷联惯导解算的目的是根据惯性器件输出求解载体姿
态、速度和位置等导航信息,实际上就是求解三个微分方程的过程,相应存在姿态更新算法、速度更新算法和位置更新算法。
(一)姿态更新算法
求解微分方程式(2.2-6)可得四元数姿态更新算法为:
在车辆行驶过程中,一般不存在高频大机动环境,并且车载导航系统往往不工作在纯惯性导航方式,而是利用里程仪或零速条件进行组合导航,所以算法误差的影响有限,常用的5ms采样周期和二子样优化算法即可满足要求。
四、捷联惯导误差模型
传感器误差、初值误差和算法误差是SINS的主要误差源,其中器件误差和初值误差又是影响导航结果的主要因素。
(一)陀螺误差模型
陀螺输出载体角运动信息,是姿态解算的直接信息源,陀螺测量误差将直接导致姿态解算误差。经过实验室标定后,陀螺误差可以描述为
(二)姿态误差方程
捷联惯导的姿态矩阵微分方程式(2.2-1)可写作
(三)速度误差方程
(四)位置误差方程
捷联惯导系统粗对准方法比较
捷联惯导系统粗对准方法比较 魏春岭 张洪钺 北京航空航天大学自动化科学与电气工程学院 北京 100083 摘 要 通过误差分析对三种捷联惯导系统解析粗对准方法进行了比较。指出在 相同的传感器精度条件下,利用正交向量计算捷联矩阵比传统方法有更高的对准 精度,直接计算法不仅精度高,而且计算简单,更适合工程应用。 主题词 捷联惯导系统 解析粗对准 Comparison of Analytic Coarse Alignment Methods Wei Chunling Zhang Hongyue Beijing University of Aeronautics and Astronautics,Beijing100083 Abstract Three analytic coarse alignment methods to strapdo wn inertial navigation system are com pared via error analysis.The later two are superior to the traditional one because their east level dri f t misalignment angles are not corrupted b y gyro uncertainty.Due to its high ac- curacy and com putation e ff iciency,the direct method is more suitable for practical applica- tions. Subject terms Strapdown inertial navigation systems Analytic coarse alignment 作为一种航迹推算系统,惯性导航系统对初始解算条件有较高要求,初始对准误差会直接影响导航的精度。对于捷联式惯性导航系统,初始对准的目的就是要确定捷联矩阵C n b。解析粗对准就是利用加速度计和陀螺仪对重力加速度和地球自转角速度的测量值估算C n b,为精对准提供初始条件,因此选择算法简单、精度更高的粗对准方法有其实际意义。本文通过误差分析与计算机仿真比较了三种解析粗对准方法,指出直接计算法更适合工程应用。 1 解析粗对准方法 假定当地纬度 已知,地理系采用东北天坐标系,则重力加速度g和地球自转角速度 收稿日期 1999年12月 16
第六章 捷联惯导
第六章捷联惯导
6-1捷联惯导的原理?捷联惯导系统概述 ?捷联惯性技术的发展过程 ?捷联惯导系统与平台惯导系统的对比 ?捷联惯导系统的基本力学编排方程?捷联惯导系统的算法概述 ?捷联惯导系统原理框图的说明 ?姿态方程的解算 (1)姿态和航向角的计算 (2)姿态矩阵的微分方程 (3)四元数的运动学微分方程 (4)等效旋转矢量法及其微分方程 (5)位移角速率方程 (6)速度方程
?导航位置方程 (1)游动方位系与地球系之间的方向余弦矩阵 (2)载体位置计算 (3)方向余弦矩阵计算 ?垂直通道阻尼 ?捷联惯性器件的余度技术?单自由度陀螺仪的配置方案 (1)四陀螺仪配置方案 (2)六陀螺仪系统 ?二自由度陀螺仪的配置方案
?捷联惯导的数值计算方法?数值积分法 (1)欧拉法 (2)四阶龙格-库塔法 ?角速率信息的提取
“ 捷联(Strapdown)”这一术语的英文原义就是“捆绑”的意思。因此,所谓捷联惯性系统也就是将惯性敏感元件(陀螺与加速度计)直接“捆绑”在载体上,从而完成制导和导航任务的系统。 V-2导弹 “阿波罗-13”宇宙飞船 “海盗”火星降落器
从捷联技术的发展过程中我们已经看到捷联系统的优越性已越来越突出的显示出来,并在许多方面已日渐代替平台系统。为什么会出现这种情况呢?为了回答这一问题,这里从生产与使用的角度将捷联系统与平台系统做一对比。 (1)硬件和软件的复杂程度 由于捷联系统没有平台框架及相连的伺服装置,因而简化了硬件;代价是增加了计算机的负担,需要一个比较复杂的实时程序。 (2)可靠性 捷联系统的可靠性要比平台系统高,其原因是它的机械构件少,加之容易采用多敏感元件配置,实现余度技术。 (3)成本与可维护性 由于平台系统在机械结构上要复杂得多,而对于捷联系统只是算法复杂些,因而从制造成本上看捷联系统的成本要比平台系统低。从市场供应的情况来看,数字计算机的价格一直在下降,而平台系统的价格一直在上升。 此外,捷联系统比平台系统具有较长的平均故障间隔时间,加之模块设计简化了维修,从而捷联系统的可维护性比平台系统大为提高了。
捷联式惯性导航系统
1 绪论 随着计算机和微电子技术的迅猛发展,利用计算机的强大解算和控制功能代替机电稳定系统成为可能。于是,一种新型惯导系统--捷联惯导系统从20世纪60年代初开始发展起来,尤其在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。 捷联式惯性导航(strap-down inertial navigation),捷联(strap-down)的英语原义是“捆绑”的意思。因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在飞行器、舰艇、导弹等需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。现代电子计算机技术的迅速发展为捷联式惯性导航系统创造了条件。惯性导航系统是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点,这些优点使得惯性导航在航天、航空、航海和测量上都得到了广泛的运用[1] 1.1 捷联惯导系统工作原理及特点 惯导系统主要分为平台式惯导系统和捷联式惯导系统两大类。惯导系统(INS)是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点。 捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。平台式惯导系统和捷联式惯导系统的主要区别是:前者有实体的物理平台,陀螺和加速度计置于陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;后者的陀螺和加速度计直接固连在载体上作
车载捷联惯导系统基本原理
车载捷联惯导系统基本原理 一、捷联惯导系统基本原理 捷联惯导系统基本原理如图2-1所示: 图中陀螺和加速度计直接与载体系b固联,用来测量载体的角运动信息和线运动信息。导航解算的本质是根据初值进行积分的过程,通过求解姿态微分方程完成对姿态和航向角的积分,通过求解比力微分方程完成对速度的积分,通过求解位置微分方程实现对位置的积分。捷联惯导的姿态矩阵C n 相当于“数学平台”,取代了平台惯导中的实体平台,而ω?相当于对数学平台“施矩”的指令角速率。
二、捷联惯导微分方程 (一)姿态微分方程 在捷联惯导系统中,导航坐标系n 和载体坐标系b 之间的角位置关系通常用姿态矩阵、四元数和欧拉角表示,相应也存在姿态矩阵微分方程、四元数微分方程和欧拉角微分方程三种形式。 姿态矩阵微分方程的表达式为:
在欧拉角微分方程式(2.2-7)中,当俯仰角θ趋于90o时,cosθ趋于0,tanθ趋于无穷,方程存在奇异性,所以这种方法不能在全姿态范围内正常工作;姿态矩阵微分方程式(2.2-1)可全姿态工作,但姿态矩阵更新相当于求解包含9个未知量的线性微分方程组,计算量大;四元数微分方程式(2.2-6)同样可以全姿态工作,且更新算法只需求解4个未知量的线性微分方程组,计算量小,算法简单,是较实用的工程算法。 (二)速度微分方程 速度微分方程即比力方程,是惯性导航解算的基本关系式: 三、捷联惯性导航算法 捷联惯导解算的目的是根据惯性器件输出求解载体姿
态、速度和位置等导航信息,实际上就是求解三个微分方程的过程,相应存在姿态更新算法、速度更新算法和位置更新算法。 (一)姿态更新算法 求解微分方程式(2.2-6)可得四元数姿态更新算法为:
捷联惯导详细讲解
捷联惯导系统从20世纪60年代初开始发展起来,在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装臵,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。 捷联式惯性导航(strap-downinertialnavigation),捷联(strap-down)的英语原义是“捆绑”的意思。因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在导弹需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。 一、捷联惯导系统工作原理及特点 惯导系统基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,之后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位臵信息等。 捷联惯导系统(SINS)是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。由于惯性元器件有固定漂移率,会造成导航误差,因此导弹通常采用指令、GPS或其组合等方式对惯导进行定时修正,以获取持续准确的位臵参数。如采用指令+捷联式惯导 捷联惯导系统能精确提供载体的姿态、地速、经纬度等导航参数,是利用惯性敏感器、基准方向及最初的位臵信息
来确定运载体的方位、位臵和速度的自主式航位推算导航系统。在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点。 除此以外捷联惯导系统的最大特点是没有实体平台,即将陀螺仪和加速度计直接安装在机动载体上,在计算机中实时的计算姿态矩阵,通过姿态矩阵把导航加速度计测量的载体沿机体坐标系轴向的加速度信息变换到导航坐标系,然后进行导航计算。同时,从姿态矩阵的元素中提取姿态和航向信息.由此可见,在捷联惯导系统中平台的作用已由计算机及其软件的作用代替了,捷联式惯导系统采用的是数学平台。力学编排就是按照合适的数学模型由观测量计算出导航定位参数。具体地讲,利用陀螺仪测得的载体相对于惯性参照系的旋转角速度,计算出载体坐标系至导航计算坐标系之问的坐标转换矩阵;将测量的比力(加速度计测量载体相对于惯性空间的线加速度)变换至导航坐标系,并经过两次积分得到所需的速度位臵信息。 二、捷联惯导系统有以下独特优点: (1)去掉了复杂的平台机械系统,系统结构极为简单,
捷联式惯导系统误差解析解研究
第22卷 第11期计 算 机 仿 真2005年11月 文章编号:1006-9348(2005)11-0042-04 捷联式惯导系统误差解析解研究 张宾,刘藻珍 (北京理工大学机电工程学院,北京100081) 摘要:该文在一定的假设条件下利用捷联惯导系统的三维误差状态模型求解出了单通道误差状态方程的解析解,列表给出 了各误差源对于某一特定误差状态的动态影响。然后利用某型导弹的弹道数据通过对两种误差模型在同一条件下进行仿 真的方法验证了单通道误差状态方程解析解的正确性。单通道误差模型对分析各种误差源对系统的影响,确定在满足系统 精度要求的条件下主要误差源的选择范围,进行系统精度分配提供了十分方便直观的方法。 关键词:捷联;误差模型;误差分析 中图分类号:V249.32 文献标识码:A Research on the Error Ana lyti c Soluti on of Strapdown I nerti a l Nav i ga ti on System ZHANG B in,L I U Zao-zhen (School of Mechanical Electr onic Engineering,Beijing I nstitute of Technol ogy,Beijing100081,China) ABSTRACT:I n this paper,err or state model of strapdown inertial navigati on syste m(SI N S)is educed and analytic s oluti on t o monochannel err or state equati on is worked out under the conditi on of certain hypotheses.The lists of the effect of each err or s ource t o a given err or status are p r ovided when SI N S is in the state of moving.The correctness of analytic s oluti on t o monochannel err or state equati on is validated by the means of t w o err or models’si m ulati on excer p2 ting the same actual traject ory data of a certain type m issile.Monochannel err or model gives a convenient and intu2 iti onistic way t o analyze the effect of all kinds of err or s ources t o the system,deli m it the selective range of main err or s ource which can meet the requirement of the syste m accuracy and all ot syste m accuracy. KE YWO RD S:Strapdown;Err or model;Err or analysis 1 引言 在导航过程中,希望惯导系统能准确地提供各种导航信 息。但各种误差源的存在,使导航信息具有一定的误差。本 文在一定的假设条件下利用捷联惯导系统的三维误差状态 模型求解出了单通道误差状态方程的解析解,列表给出了各 误差源对于某一特定误差状态的动态影响。然后利用某型 导弹的弹道数据通过对两种误差模型在同一条件下进行仿 真的方法验证了单通道误差状态方程解析解的正确性。 单通道误差模型对分析各种误差源对系统的影响,确定 在满足系统精度要求的条件下主要误差源的选择范围,进行 系统精度分配提供了十分方便直观的方法。 2 捷联惯导误差模型 当地水平坐标系(L)中,捷联惯导系统力学编排方程计 算输出的状态变量包括:大地坐标(φ,λ,h),运动速度(V e , V n,V u)及姿态信息(r,p,y)等量。此时相应的误差状态向量 δX(t)=[ 第15卷第l期2007年2月 中国惯性技术学报 JoumalofChineseInertialTcchnology Vbl.15No.1 Feb.2007 文章编号:1005-6734(2007)01一0024-04 车载捷联惯导系统定位测姿算法研究 陈允芳1,叶泽田2,钟若飞3 (1.山东科技大学地球信息科学与工程学院,青岛266510;2.中国测绘科学研究院,北京100039; 3.首都师范大学,北京100037) 摘要:GPs/INs组合精确测定平台的位置和姿态是移动测图系统中的重要模块。对陀螺仪和加速度计所测角速度和比力进行两次积分得载体姿态、速度和位置即sINs力学机械编排。目前该过程大多在地理坐标系进行。 这里详细推导了地球坐标系中完整的解算过程,以四元数姿态矩阵更新及重力计算为核心,由IMu原始观测值解算出了载体位置、速度和姿态等参数,可快速高效与GPs输出的位置速度信息进行组合滤波处理,可据此编程进行工程应用数据处理。 关键词:捷联惯导系统;姿态矩阵;坐标转换;力学编排;四元数 中图分类号:u666.1文献标识码:A PositioningandorientationcomputationonVehicle-borne SINSanddiscussofcalculationerror cHENYun.‰91,YEze-tian2,zHONGRuo.fei3 (1.Geo?info衄ationScience&EngineeringCollege,ShandongUniverSi哆ofScienceaIldTbchnology,Qingdao 266510,China;2.SurveyingaTldMappingScienceResearchInStituteofChina,Beijing100039,China;3.C印ital NomlalUniverSi劬Beijing100037,China) Abstract:GPSandINSintegratedtoaccuratelydeteminingpositionaIldattitudeofnatI‘oofisVitalmoduleinmobilemappingSystem.Specincforcc行omspeedometer蚰d舭glerate矗om留roareinte铲atedtwicerespectiVelytoachievean沁de,veloc时aIldpositionn锄elySINSmechaIlization.Currentlythistookplacedingeogr印hiccoordinate,whiIeheredemonstratedindetailmewholemechaJlizationineanll-centclrcdearth-fixedcoordinate,mostlyquatemiona钍itudematrixupdating锄dgravit)rcaIculation.Ultimatelyvehiclenavigationpar锄eterssuchaSattitude,veIocity锄dpositionwercgahed丘omIMUorigin“0bservations.Mathematicsplatfo眦isfomlcdinSrNStocarryoutsuⅣeyingaJldcalculatingpreciselythenavigationmoVement par锄cterS.Theresultsarcpronetointe黟atewitllsimilarpammeters疔omGPStofilterprocessing.Pro可锄minghercbyc锄pmcessdatainengineeringapplication Keywords:SINS;attitudematrix;coordinatetransfomation;mechanization;quatemion 随着惯性技术与卫星导航定位技术的发展,由GPS/INs不同程度组合而成的定位定姿传感器已成为移动测图系统中确定载体轨迹和平台姿态的重要工具,其中GPs多用于定位而INS则用于测姿。捷联惯导系统(sINs)是将惯性仪表直接固联在载体上而无须采用机械陀螺稳定平台,通过导航计算机中相应程序建立“数学的”陀螺稳定平台,即计算机处理测量值得到载体位置、速度和运动方向估计值以实现导航平台功能。尽管sINS于20世纪50年代即在美国获得专利,但因受限于惯性设备和计算机技术的发展而一直未能实用。近年来,电子和高速计算机技术的发展使得捷联技术得以实现和充分发展,这是惯性技术在近20年内发展的一个重要的标志。 INS的核心部件是惯性测量单元(IMU),按照其陀螺仪和加速计等元件的精度,可将惯导分为不同等级:战略级(<0.000l(o)/}l,l岖)、导航级(0:000l~0.015)(o)/Il,5~100嵋)、低成本((1~10(。冲,(0.1~1)n培)。考虑到惯性设备出口管制政策及需求与成本等问题,民用INs精度范围一般为低成本级别。 收稿日期:2006—06—16;修回日期:2006—12—22 基金项目:国家863基金课题(2006AAl22324);教育部三维信息获取与应用重点实验室开放基金 作者简介:陈允芳(1977一),女,博士生,讲师,主要从事移动测图与组合导航。 一、原理分析: 捷联式惯导系统是将惯性器件(陀螺仪和加速度计)直接固连在载体上的系统。图1为捷联式惯导系统的原理图,陀螺仪和加速度计输出分别送入姿态矩阵计算和由载体坐标系至平台坐标系的方向余弦矩阵的计算。有了姿态矩阵,其一可以实现把载体坐标系轴向加速度信息变换到导航坐标系轴,进而可以进行所需的导航参数计算,其二利用姿态矩阵的元素,提取方位和姿态信息。 图1. 捷联式惯导系统的原理图 姿态速率微分方程为: 12b tb ωΛ=Λ (1) 其中; () b b b t t tb ib t ie et C ωωωω=-- (2) b ib ω为陀螺仪测量经补偿后的值; 0cos sin t iex t t ie iey ie t ie iez L L ωωωωωω?? ? ????? ??==???????????? ,为地球自转角速率; tan t ety t yt etx t t t etx et ety xt t etz t etx xt V R V R V L R ωωωω??-?? ? ???? ????? ??==?????????????????? ,为地理坐标系相对地球坐标系的转动角速率; 导航坐标系到载体坐标系的姿态矩阵为: cos cos sin sin sin sin cos cos sin sin cos sin sin cos cos cos sin cos sin sin sin cos sin sin cos sin cos cos cos t t C ψ?ψθ? ψ?ψθ? θ?ψθ ψθ θ ψ?ψθ? ψ?ψθ? θ?-+-?? ?? =-?? ??+-?? (3) 对应的四元素初值为: 0123cos cos cos sin sin sin 2 2 2 22 2 cos sin cos sin cos sin 2 2 2 2 2 2 cos cos sin sin sin cos 2 2 2 2 2 2 cos sin sin sin cos cos 2 2 2 2 2 2ψ θ ? ψ θ ? λψ θ ? ψθ ? λψ θ ? ψ θ ? λψ θ ? ψ θ ? λ? =-???=-???=+???=+? (4) 四元素姿态矩阵为: 22220123120313022 2 2 2 12030123 230122221302230101232() 2()2() 2()2() 2() b t C λλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλ?? +++++?? =--+-+????----+? ? (5) 将姿态速率微分方程展开成矩阵形式: 0112233001020b b b tbx tby tbx b b b tbx tbz tby b b b tby tbz tbx b b b tbz tby tbx λλωωωλλωωωωωωλλωωωλλ???? ??---??????-??????=??????-??????-???????????? (6) 2004年第18卷第3期测试技术学报V o l.18 N o.3 2004 (总第49期)JOURNAL OF TEST AND M EASURE M ENT TECHNOLOG Y(Sum N o.49) 文章编号:167127449(2004)0320269205 无陀螺捷联惯导系统综述 Ξ曹咏弘,祖 静,林祖森 (华北工学院测试技术研究所,山西太原030051) 摘 要: 结合国内外的文献资料,对无陀螺捷联惯导系统的研究进行了总结,重点讨论了无陀螺捷联惯导 系统中的两个重要问题,即加速度配置方式和角速度解算方法,简要分析了无陀螺捷联惯导系统的误差和 精度问题.最后对无陀螺捷联惯导系统的未来研究方向进行了展望. 关键词: 无陀螺捷联惯导系统;加速度计配置方式;角速度 中图分类号: V249.32+2 文献标识码:A Rev iew of the Gyroscope Free Strap-D own I nerti al Nav igation System CAO Yong2hong,Z U J ing,L I N Zu2sen (Institute of T est T echno logy,N o rth Ch ina Institute of T echno logy,T aiyuan030051,Ch ina) Abstract: Com b in ing the dom estic and in ternati onal docum en t m aterials,the study on GFS I N S is summ arized in th is paper.Tw o i m po rtan t p rob lem s of GFS I N S are discu ssed especially,nam ely the accelerom eter allocati on schem e and angu lar velocity calcu lative m ethod,and the erro r and p recisi on questi on of GFS I N S is b riefly analysed.In the end,the fu tu re research on GFS I N S is discu ssed. Key words:the gyro scope free strap2dow n inertial navigati on system l;accelerom eter allocati on schem e; angu lar velocity 用加速度计代替陀螺仪,并且从加速度计量测的比力中解算出载体的角速度,进而只用加速度计来组成捷联惯导的测量组合,称为无陀螺捷联惯导系统(T he Gyro scope F ree Strap2dow n Inertial N avigati on System简称GFS I N S).目前的研究发现无陀螺捷联惯导系统适用于大动态范围、导航时间较短的载体的惯性制导,其优点是低成本、低功耗、长寿命、高可靠性、抗高过载等.随着新型高精度加速度计的出现和滤波技术的发展,可达到较高的导航精度.目前,GFS I N S研究引起了很大的重视,成为一个研究热点. 1 无陀螺捷联惯导系统的研究现状 早在1962年,V icto r B.Co rey简单地论述了采用线加速度计测量角加速度的原理,提出了一种加速度计的简单编排方式[1],在1965年,V.K rishnan论述了通过安装在以稳定速度旋转的圆盘上的线性加速度计测量载体角速度和线加速度方法的数学原理[2],随后A lfred R.Schu ler在1967年提出利用线加速度计测量物体的旋转运动的想法,并提出了多种加速度计的配置方式[3],1975年A.J.Padgaonkar等人提出了一种采用9加速度计的力学编排方式计算载体角加速度和线加速度的方法[4],1982年,Shm uel J. Ξ收稿日期:2003211218 基金项目:山西省青年科技研究基金项目(20031026) 作者简介:曹咏弘(1972-),男,讲师,博士生,主要从事飞行体姿态解算方法研究. 导航原理作业(惯性导航部分) 一枚导弹采用捷联惯性导航系统,三个速率陀螺仪Gx, Gy, Gz 和三个加速度计Ax, Ay, Az 的敏感轴分别沿着着 弹体坐标系的Xb, Yb, Zb轴。初始时刻该导弹处在北纬 45.75度,东经126.63度。 第一种情形:正对导弹进行地面静态测试(导弹质心相对地面静止)。 初始时刻弹体坐标系和地理坐标系重合,如图所示,弹体的Xb轴指东,Yb轴指北,Zb轴指天。此后弹体坐标系Xb-Yb-Zb 相对地理坐标系的转动如下: 首先,弹体绕Zb(方位轴)转过-10 度; 接着,弹体绕Xb(俯仰轴)转过15 度; 然后,弹体绕Yb(滚动轴)转过20 度; 最后弹体相对地面停止旋转。 请分别用方向余弦矩阵和四元数两种方法计算:弹体经过三次旋转并停止之后,弹体上三个加速度计Ax, Ay, Az的输出。取重力加速度的大小g = 9.8m/s2。 第二种情形:导弹正在飞行中。 初始时刻弹体坐标系仍和地理坐标系重合;且导弹初始高度200m,初始北向速度1800 m/s,初始东向速度和垂直速度都为零。 陀螺仪和加速度计的输出都为脉冲数形式,陀螺输出的每个脉冲代表0.00001弧度的角增量。加速度计输出的每个脉冲代表1μg,1g = 9.8m/s2。陀螺仪和加速度计输出的采样频率都为10Hz,在200秒内三个陀螺仪和三个加速度计的输出存在了数据文件gaout.mat中,内含一矩阵变量ga,有2000行,6列。每一行中的数据代表每个采样时刻三个陀螺Gx, Gy, Gz和三个加速度计Ax, Ay, Az 的输出的脉冲数。格式如下表(前10行) 将地球视为理想的球体,半径6371.00公里,且不考虑仪表误差,也不考虑弹体高度对重力加速度的影响。选取弹体的姿态计算周期为0.1秒,速度和位置的计算周期为1秒。 (1)请计算200秒后弹体到达的经纬度和高度,东向和北向速度; (2)请计算200秒后弹体相对当地地理坐标系的姿态四元数; (3)请绘制出200秒内导弹的经、纬度变化曲线(以经度为横轴,纬度为纵轴); (4)请绘制出200秒内导弹的高度变化曲线(以时间为横轴,高度为纵轴)。 二、程序设计说明及代码 1.第一种情形 (1)方向余弦矩阵法 1)程序代码 clear;clc; thetax=15*pi/180;thetay=20*pi/180;thetaz=(-10)*pi/180; A0=[0;0;-9.8]; Theta=[0,-thetaz,thetay;thetaz,0,-thetax;-thetay,thetax,0]; theta0=sqrt(thetax^2+thetay^2+thetaz^2); S=(sin(theta0))/theta0;C=(1-cos(theta0))/theta0^2; CT=eye(3)+S*Theta+C*(Theta^2); CTN=inv(CT); A1=CTN*A0 2)输出结果 (2)四元数法 1)程序代码 捷联惯导系统快速罗经初始对准方法研究1 严恭敏1,严卫生1,2,徐德民1,2 1西北工业大学航海学院,西安(710072) 2水下信息处理与控制国家级重点实验室,西安(710072) E-mail:yangongmin@https://www.360docs.net/doc/4713952714.html, 摘要:在分析平台罗经初始对准原理基础上,提出了捷联罗经初始对准的原理并推导了适合于软件编程的算法。将捷联罗经对准的具体实现划分为四个阶段:方位角未知情况下的水平对准、粗略方位自对准、重新水平对准和罗经方位对准,通过对大方位误差角捷联惯导非线性误差方程的简化,推导了粗略方位自对准的算法公式。如果导航计算机存储容量足够大并且计算能力足够强,根据捷联惯导系统数学平台多样性和可进行逆向姿态控制的特点,设计了一种用于缩短捷联罗经初始对准时间的具体步骤。最后,试验表明快速捷联罗经对准方案是有效的。 关键词:捷联惯导系统,罗经效应,初始对准,逆向控制 中图分类号:V249.3 1. 引言 平台惯导系统罗经初始对准过程通常可分为两步,先是水平调平,然后是方位对准。方位对准在水平调平的基础上进行,一般采样罗经方位对准方法。方位罗经对准利用的是罗经效应,也就是,在正确的平台跟踪当地地理坐标系的角速率控制指令下,如果平台存在方位轴向的偏差角,平台将产生绕东向轴的倾斜,该倾斜能由北向加速度计感测到,利用北向加速度计的输出并设计适当的控制规律,控制平台方位轴朝减小方位偏差方向转动,实现平台自动寻北。捷联惯导系统初始对准通常可分为粗对准和精对准两个阶段:在粗对准阶段,利用地球自转角速度和重力加速度作为参考量,通过惯性器件的测量输出建立粗略的导航计算坐标系;在精对准阶段,通过现代控制理论最优估计方法估计出失准角,获得准确的姿态矩阵[1,2]。 捷联惯导系统经典解析式粗对准方法难以适应晃动干扰环境,有不少文献研究了晃动基座下的初始对准问题并且也出现一些应用实例,激光陀螺和光纤陀螺的发展和不断成熟为捷联罗经的研究注入了新的活力[3-6]。从本质上说,捷联惯导系统与平台惯导系统是相同的,前者以数学平台(利用姿态矩阵、四元数或欧拉角等数学工具)模拟后者的实体平台,描述捷联惯导系统相对于参考坐标系的空间方位。平台惯导系统中实体平台具有隔离外界干扰的作用,因而平台罗经能够实现晃动基座下的初始对准,同理,在捷联惯导系统初始对准中也可以根据平台罗经初始对准的特点,建立相应的数学平台隔离晃动影响。经典控制理论与现代最优估计方法相比,前者的优点之一是勿需精确的数学模型与噪声模型,应用经典控制理论进行罗经对准的设计方法已经非常成熟,为捷联罗经对准方案设计提供了大量的参考,然而初始对准时间长是平台罗经的一大缺点。快速初始对准是国内在捷联罗经对准方法研究中亟待解决的一个主要问题,该问题在某些西方国家已得到较好解决,例如法国iXSea公司的OctansIII型光纤陀螺罗经在动态环境下,能在3min内完成初始对准,达到0.2o×sec(L)的精度[5],成为捷联罗经研究与应用中的佼佼者,它为我们的研究和工程开发目标提供了参考。 本文从分析平台罗经初始对准的原理出发,提出了捷联罗经初始对准的原理并推导了便于软件编程的算法,通过对大方位误差角捷联惯导非线性误差方程的简化,推导了粗略方位 1本课题得到水下信息处理与控制国家级重点实验室基金(9140C230206070C2306)的资助。 捷联惯导系统从20 世纪60 年代初开始发展起来,在1969年,捷联惯导系统作为"阿波罗"-13 号登月飞船的应急备份装臵,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。 捷联式惯性导航(strap-downinertialnavigation) ,捷联( strap-down )的英语原义是“捆绑”的意思。因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在导弹需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。 一、捷联惯导系统工作原理及特点惯导系统基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,之后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位臵信息等。 捷联惯导系统(SINS)是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。由于惯性元器件有固定漂移率,会造成导航误差,因此导弹通常采用指令、GPS或其组合等方式对惯导进行定时修正,以获取持续准确的位臵参数。如采用指令+捷联式惯导 捷联惯导系统能精确提供载体的姿态、地速、经纬度等导航参数,是利用惯性敏感器、基准方向及最初的位臵信息来确定运载体的方位、位臵和速度的自主式航位推算导航系统。在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。它完全是依靠载体 自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭” 空间内实现精确导航。所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点。 除此以外捷联惯导系统的最大特点是没有实体平台,即将陀螺仪和加速度计直接安装在机动载体上,在计算机中实时的计算姿态矩阵,通过姿态矩阵把导航加速度计测量的载体沿机体坐标系轴向的加速度信息变换到导航坐标系,然后进行导航计算。同时,从姿态矩阵的元素中提取姿态和航向信息.由此可见,在捷联惯导系统中平台的作用已由计算机及其软件的作用代替了,捷联式惯导系统采用的是数学平台。力学编排就是按照合适的数学模型由观测量计算出导航定位参数。具体地讲,利用陀螺仪测得的载体相对于惯性参照系的旋转角速度,计算出载体坐标系至导航计算坐标系之问的坐标转换矩阵;将测量的比力(加速度计测量载体相对于惯性空间的线加速度)变换至导航坐标系,并经过两次积分得到所需的速度位臵信息。 二、捷联惯导系统有以下独特优点: (1)去掉了复杂的平台机械系统,系统结构极为简单,减小了系统的体积和重量,同时降低了成本,简化了维修,提高了可靠性。 (2)无常用的机械平台,缩短了整个系统的启动准备时间,也消除了与平台系统有关的误差。 (3)无框架锁定系统,允许全方位(全姿态)工作。 (4)除能提供平台式系统所能提供的所有参数外,还可以提供 捷联式惯导系统初始对准 惯性技术是惯导(惯性导航与惯性制导)技术、惯性仪表技术、惯性测量技术以及有关设备和装置技术的统称。惯性导航与惯性制导是当今非常重要的综合技术之一,它广泛用于航空、航海、航天及陆地各领域。惯性导航系统是和用陀螺与加速度计通过最初的方向基准和位置信息来确定运载体在一特定坐标系内的姿态、位置、速度和加速度的自主式导航系统。惯性制导系统是利用运载体内部的陀螺、加速度计测量其运动参数,经过计算机发出控制指令,从而把运载体按照预定的路线准确地引导到目的地的制导系统。自主性是惯性系统最重要的特点。确定运动对象导航参数的方法和仪器有许多,例如磁、天文、无线电、水声、全球卫星定位系统等等,然而它们都有一个致命的弱点,即不是自主的,不是要向外界发出信息,就是要依赖对外观测信息,而惯性系统与上述诸方法的基本区别就在于是完全自主的,即导弹、潜艇、飞船等可以在一个完全与外界条件以及电磁波隔绝的假想“封闭”空间内实现精确导航。因此,惯导系统具有隐蔽性好、抗干扰、不受任何气象条件限制的优点,且数据更新速率高,可以提供连续实时的导航参数。 惯性系统在国防科学技术中占有非常重要的地位,因而是世界各工业强国重点发展的技术领域之一。随着惯性技术的不断发展,许多国家已将其应用领域扩大到现代化交通运输,海洋开发,大地测量与勘探,石油钻井,矿井、隧道的掘进与贯通,机器人控制,现代化医疗器械,摄影技术以及森林防护,农业播种、施肥等民用领域。惯性技术的发展表明:从传统的机械转子型陀螺向固态陀螺仪(激光、光纤陀螺仪)转移,并进一步向以半导体硅为基本材料的微机械振动陀螺发展;从框架式平台系统向捷联系统转移,从纯惯性捷联系统向以惯性系统为基础的多体制组合导航系统发展,成为今后惯性技术发展的总趋势。 捷联式惯性导航系统,导航用的加速度计是直接捆绑在运载体上,它测量的是运载体坐标系轴向比力,只要把这个比力转换到惯性坐标系上,则其他计算就和空间稳定的平台式惯性导航系统一样,而比力转换的关键就是要实时地进行姿态基准计算来提供数学平台,即实时更新姿态矩阵b C,有些资料上称姿态矩阵 g 为捷联矩阵或方向余弦矩阵b C。一般选择地理坐标系为导航坐标系,那么捷联 g 矩阵也可表示为i C,其导航原理图如下所示: g 第二章 捷联惯导系统的初试对准 2.1引言 惯导系统是一种自主式导航系统。它不需要任何人为的外部信息,只要给定导航的初始条件(例如初始速度、位置等),便可根据系统中的惯性敏感元件测量的比力和角速率通过计算机实时地计算出各种导航参数。由于“平台”是测量比力的基准,因此“平台”的初始对准就非常重要。对于平台惯导系统,初试对准的任务就是要将平台调整在给定的导航坐标系的方向上。若采用游动方位系统,则需要将平台调水平---称为水平对准,并将平台的方位角调至某个方位角处---称为方位对准。对于捷联惯导系统,由于捷联矩阵T 起到了平台的作用,因此导航工作一开始就需要获得捷联矩阵T 的初始值,以便完成导航的任务。显然捷联惯导系统的初始对准就是确定捷联矩阵的初始值。在静基座条件下,捷联惯导系统的加速度计的输入量为---b g ,陀螺的输入量为地球自转角速率b ie ω。因此b g 与 b ie ω就成为初始对准的基准。将陀螺与加速度计的输入引出计算机,通过计算机 就可以计算出捷联矩阵T 的初始值。 由以上的分析可以看出,陀螺与加速度计的误差会导致对准误差;对准飞行器的干扰运动也是产生对准误差的重要因素。因此滤波技术对捷联系统尤其重要。由于初始对准的误差将会对捷联惯导系统的工作造成难以消除的影响,因此研究初始对准的误差传播方程也是非常必要的。 2.2 捷联惯导系统的基本工作原理 捷联式惯性导航系统,陀螺仪和加速度计直接与载体固联,加速度计测量是载体坐标系轴向比力,只要把这个比力转换到导航坐标系上,则其它计算就与平台式惯性导航系统一样,而比力转换的关键就是要实时地进行姿态基准计算来提供数学平台,即实时更新姿态矩阵n b C ,姿态矩阵也称为捷联矩阵。一般选择地理坐标系为导航坐标系,那么捷联矩阵n b C 也可表示为t b C , 其导航原理图如图2.1所示。 捷联惯性技术的发展及与平台惯导系统的对比 [2009-06-20] 作者:admin 来源: 1.惯性技术与惯性导航的概述 惯性技术是惯性导航技术、惯性制导技术、惯性仪表技术、惯性测量技术以及惯性测试设备和装置技术的统称。它已有四十多年的发展历史了。由于惯性技术的自主性等特点,它不需要引人外界信息便可实现制导于导航。所以,它在国防科技中占有非常重要的地位,广泛的运用于航天、航空、航海等军事领域;随着惯性技术和计算机技术的不断发展以及成本降低,许多国家将其应用领域扩大到现代化交通运输、海洋开发、大地测量与勘探、石油钻井、矿井、隧道的掘进与贯通、机器人控制、现代化医疗器械、摄影技术以及森林防护、农业播种、施肥等民用领域。 惯性导航系统(Inertial Navigation System),简称惯导,是利用惯性敏感元件、基准方向及最初的位置信息来确定运载体的方位、姿态和速度的自主式航位推算系统。惯性导航系统可以分为平台式惯导系统和捷联式惯导系统两大类:平台式惯导系统是将陀螺仪和加速计安装在一个稳定平台上,以平台坐标系为基准,测量运载体运动参数的惯性导航系统;捷联式惯导系统(Strapdown Inertial Navigation System , SI )是将惯性敏感元件(陀螺仪和加速计)直接安装在运载体上,是一种不再需要稳定平台或常平架系统的惯性导航系统。 导航的目的就是为了得到运载体的实时的方位、姿态和速度。在工程运用中,能够测定物体运动参数的方法很多:如测量位移可以用里程计,还可以用无线电定位技术、天文定位技术和卫星定位技术等;要测速度可以用测速计;要测转角可用角位置传感器(电位计、光电码盘等等);要测角速度可以用转速表、测速电机等等。但是,以上各种测量手段还没有一种能够在同一时刻单独实时而又高精度地测量运载体的线运动和角运动,而惯性技术恰是测量这些运动参数的最理想的手段。 惯性导航系统不仅可以全面地检测到几乎所有的运动参数,而且还有一个极大的优点――是完全自主式的导航测量方法。它不依赖声、光、磁、电等外部信息来测量物体的运动参数,其工作完全不受自然的和人为的干扰影响,具有极其重要的军事意义。所以惯性技术是其它任何导航定位定向手段不能替代的。 正因为惯性技术的地位如此重要,它受到世界上技术先进国家的普遍重视。美、英、法、德和前苏联都投入相当大的力量从事惯性技术及有关装置的研究。现代科技发展促进了惯导技术的发展,惯性导航技术已经成为现代高科技发展水平的标志之一。 2.捷联惯性技术的发展 捷联具有悠久的历史,所谓捷联捷联惯性系统也就是将惯性敏感元件(陀螺与加速度计)直接捆绑在飞行器上从而完成制导。捷联惯导技术最早可以追溯到18世纪50年代,德国著名科学家博耐伯格(Joha Gottlob Friedrich von Bohne erger)发明了带有稳定平台的陀螺仪(gyroscope)模型。100年之后法国的光学物理实验学家傅科(Leon Foucault)发明了现代意义上的陀螺并提出了陀螺罗经理论。此后一直到第二次世界大战,有一大批著名的科学家为惯性技术做出了杰出的贡献,如著名科学家安修茨(Dr. Herma Auschutz-Kaempfe)、斯佩里(Elmer Ambrose erry)、德雷珀(Dr. Charles Stark Draper)、舒勒(Prof. Max Schuler)等。 真正第一次出色完成导航任务的是二战末期德国著名火箭专家冯?布劳恩(Wernher V on Braun)和他的研制小组发明的著名的V-2火箭。在V-2火箭上装载的导航系统就是最原始的捷联惯性导航系统,该火箭从当时纳粹德国飞越过英吉利海峡准确命中伦敦,震惊世界。捷联惯导技术在美国和苏联迅速地发展起来,主要用于军事武器系统。1950年起,麻省理工学院德雷珀实验室先后完成了平台惯导系统的飞行器试飞和舰船试航。同时,捷联系统也得到成熟的探索。1969年,在“阿波罗-13”宇宙飞船在飞向月球途中,服务舱发生爆炸使车载捷联惯导系统定位测姿算法研究
捷联惯导作业
无陀螺捷联惯导系统综述
导航原理_捷联惯导系统
捷联惯导系统快速罗经初始对准方法研究
捷联惯导详细讲解
捷联式惯导系统初始对准
2捷联惯性导航系统初始对准原理
捷联惯性技术的发展及与平台惯导系统的对比