第二章 结构图等效化简
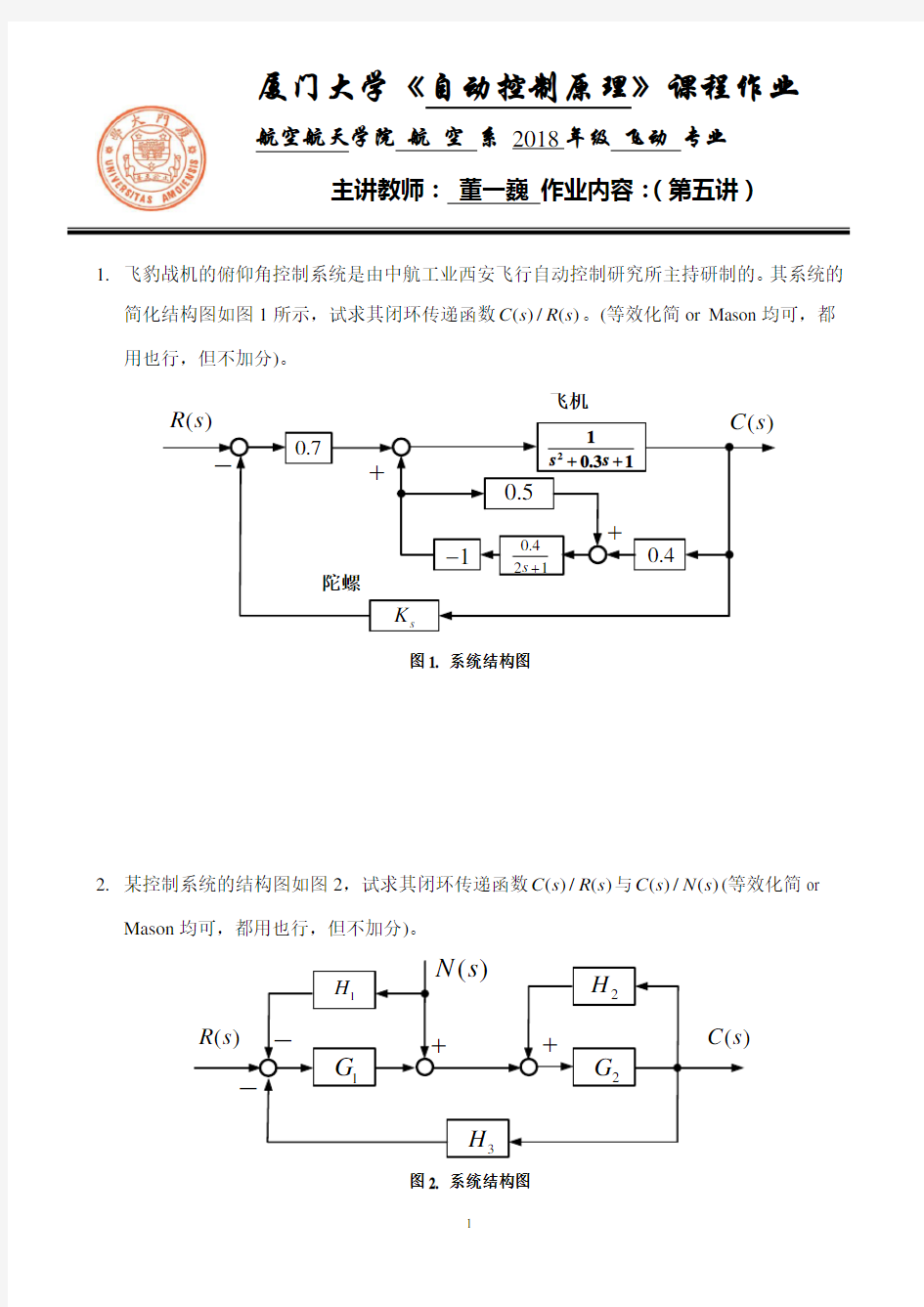

1. 飞豹战机的俯仰角控制系统是由中航工业西安飞行自动控制研究所主持研制的。其系统的
简化结构图如图1所示,试求其闭环传递函数()/()C s R s 。(等效化简or Mason 均可,都用也行,但不加分)。
飞机
陀螺
()
R s ()
C s -
+
21
0.31
s s ++0.5
1
-0.421
s +0.4
0.7
s
K +
图1. 系统结构图
2. 某控制系统的结构图如图2,试求其闭环传递函数()/()C s R s 与()/()C s N s (等效化简or
Mason 均可,都用也行,但不加分)。
()
R s ()
C s -
-
+
+
1
H 2
H 3
H 1G 2
G ()N s
图2. 系统结构图
厦门大学《自动控制原理》课程作业
航空航天学院 航 空 系 2018年级 飞动 专业
主讲教师: 董一巍 作业内容:(第五讲)
3.试求闭环传递函数()/()
C s R s(等效化简or Mason均可,都用也行,但不加分)。
)s
图3. 系统结构图
(完整word版)结构图等效变换规则
结构图等效变换 1.环节串联: R s G s G R s G U U s G C ??=?=↓?=)()()()(1212 2.环节并联 []R s G s G R s G R s G R s G U R s G U U U C ?±=±=?=↓?=↓±=)()()()()()(212122112 1 3.反馈连接 C s H s G R s G C C s H R B R E E s G C ?±?=?±=±=↓?=)()()()()( []R s G C s H s G ?=)()()(1μ ) ()(1) ()()()(s H s G s G s R s C s μ== Φ
变换 方式 原方框图 等效方框图 等效运算关系 串联 )()()()(21s R s G s G s C = 并联 ) ()]()([)(21s R s G s G s C ±= 反馈 ()() ()1()() G s R s C s G s H s = m 比较点前移 ) (])()()([) ()()()(s G s G s Q s R s Q s G s R s C ±=±= 比较点 后移 ) ()()()() ()]()([)(s G s Q s G s R s G s Q s R s C ±=±= 引出点前移 )()()(s R s G s C = 引出点后移 ) ()()()(1) ()()(s R s G s C s G s G s R s R == 比较点之间的移动 123()()()()C s R s R s R s =±± 引出点之间的移动 12()()()()C s C s C s R s === 比较点与引出点之间的移动 )()()(21s R s R s C -=
高中物理电路简化
例谈综合法简化电路 一、简化电路的具体方法 1.支路电流法:电流是分析电路的核心。从电源正极出发顺着电流的走向,经各电阻外电路巡行一周至电源的负 极,凡是电流无分叉地依次流过的电阻均为串联,凡是电流有分叉地依次流过的电阻均为并联。 例 1:试判断图 1 中三灯的连接方式。 【解析】由图 1 可以看出,从电源正极流出的电流在 A 点分成三部分。一部分流过灯L1,一部分流过灯L2,一部分流过灯L3,然后在 B 点汇合流入电源的负极,从并联电路的特点可知此三灯并联。 【题后小结】支路电流法,关键是看电路中哪些点有电流分叉。此法在解决复杂电路时显得有些力不从心。 2.等电势法:将已知电路中各节点(电路中三条或三条以上支路的交叉点,称为节点)编号,按电势由高到低的顺 序依次用 1、 2、 3??数码标出来(接于电源正极的节点电势最高,接于电源负极的节点电势最低,等电势的节点 用同一数码)。然后按电势的高低将各节点重新排布,再将各元件跨接到相对应的两节点之间,即可画出等效电路。 例 2:判断图 2 各电阻的连接方式。 【解析】( 1)将节点标号,四个节点分别标上1、 2。 (2)将各个节点沿电流的流向依次排在一条直线上。 (3)将各个电路元件对号入座,画出规范的等效电路图,如图3 所示。
(4)从等效电路图可判断,四个电阻是并联关系。 【题后小结】等电势法,关键是找各等势点。在解复杂电路问题时,需综合以上两法的优点。 二、综合法:支路电流法与等电势法的综合。 注意点:( 1)给相同的节点编号。 (2)电流的流向:由高电势点流向低电势点(等势点间无电流),每个节点流入电流之和等于流出电流之和。 例 3:由 5 个 1Ω电阻连成的如图 4 所示的电路,导线的电阻不计,则A、 B 间的等效电阻为_______Ω。 【策略】采用综合法,设 A 点接电源正极, B 点接电源负极,将图示电路中的节点找出,凡是用导线相连的节点可 认为是同一节点,然后按电流从 A 端流入,从 B 端流出的原则来分析电流经过电路时的各电阻连接形式就表现出来了。 【解析】由于节点A、D 间是用导线相连,这两点是等势点(均标1),节点C、 F 间是用导线相连,这两点是 等势点(均标2),节点E、 B 间是用导线相连,这两点是等势点(均标3),则 A 点电势最高, C(F)次之, B 点电势最低,根据电流由高电势流向低电势,易得出各电阻的电流方向。 由于电阻 R1,R2 均有一端接点 1,另一端接点 2;电阻 R4, R5 均有一端接点 2,另一端接点 3;电阻 R3 一端接点 1,另一端接点 3,易得其等效电路如图 5 所示。 或者用图 4 中所标电流方向,也可得其等效电路如图5,相比第一种方法更简单。故AB 间总电阻力0. 5Ω 。
等效电路图练习题
A 1 A 3 V A 2 R 1 R 2 R 3 图25 等效电路训练题 1画出等效电路图 2画出等效电路图 3当闭合开关S 0、S 1,断开开关S 2时 当闭合开关S 2,断开开关S 0、S 1时 4当S 1、、S 2 均闭合且滑片P 滑到a 端时 当S 1、S 2 均断开且滑片P 在a 端时 5当闭合开关S 1,断开开关S 2和S 3, 当闭合开关S 1、S 2,断开S 3时 当闭合开关S 3,断开S 1 、S 2时 6、1、S 2闭合,滑动变阻器的滑片P 在a 端时 当S 1、S 2都断开,滑片P 在b 端时 7、合开关3S ,滑动变阻器的滑片P 在最左端时 只断开开关1S ,滑片P 移至最右端时 只闭合开关1S ,滑片P 在最右端时 8滑动变阻器的滑片P 置于中点M ,且只闭合开关S 1时;动变阻器的滑片P 置于B 端,断开开关S 1,闭合开关S 2时;滑动变阻器的滑片P 置于A 端,闭合开关S 1和开关S 2时 9滑动变阻器的滑片P 在B 端,只闭合S 2时 滑片P 在B 端,开关都断开时 当滑片在A 端,只闭合S 1时 10所示,电源电压不变,滑动变阻器的滑片P 在中点c 和端点b 时,电压表的示数之比为3:2,求:(1)滑动变阻器的滑片P 在中点c 和端点b 时,电路中电流之比; (2)R 0与R ab 的比值。 11所示, 电源电压不变,电灯L 的电阻不变。开关S 闭合时,滑动变阻器的滑片P 在中点 c 和端点b 时,电压表的示数之比为3:4。求:(1)滑动变阻器的滑片P 在中点c 和端点b 时,电路中电流之比(2).电灯L 的电阻与滑动变阻器ab 间的总电阻的比值等于多少? 12如图17所示电路,电源电压保持不变。当开关S 闭合与断开时电压表V 1的示数之比为3:2,电压表V 2的示数之比为9:10。已知电阻R 2=4 。求:电阻R 1和电阻R 3的阻值。 13、19所示,电路中电源两端电压保持不变,滑动变阻器的最大阻值为R 3。将滑动变阻器的滑片P 置于A 端,只闭合开关S 1时,电压表V 1的示数为U 1,电压表V 2的示数为U 2;将滑动变阻器的滑片P 置于B 端,仍只闭合开关S 1时,电压表V 1的示数为U 1′,电压表V 2的示 V 2 V 1 A R 1 R 2 P S 图12 S V A L 1 L 2 S 0 S 1 S 2 R 3 R 4 图39 图23 a V A 1 A 2 S 1 S 2 R 2 R 1 L b a c b
2-3 方框图的等效变换
§2-3 方块图的等效变换 物理系统的动态特性也可以用方块图表示。利用这种方块图,能方便地对环节或系统进行研究。另外,通过方块图的变换,可以方便地用图解法消去中间变量得出物理系统总的传递函数。 自动控制系统的方块图一般包含四种基本单元。 (l )函数方块 它表示系统中某一环节或元件的动态特性。方块中所写的便是这个环节或元件的传递函数)(s G 或)(s H (如图2-13 ( b )所示)。它表示对信号进行数学变换。显然,函数方块的输出变量等于该方块输人变量与传递函数的乘积。即 )()()(0s X s G s X e =; )()()(0s X s H s X f =。 (2)信号线 带箭头的直线,箭头表示信 号的传递方向,线上标有信号的时间函数或象函数。 (3)分支点(又称引出点或测量点) 图上的“O ”点表示信号引出或测量的位置。同一位置引出的信号在数值和性质方面完全相同。 (4)汇合点(又称比较点) 对两个以上信号进行代数运算。‘ + 示。 任何复杂系统都是由许多元件组成的。每一个元件的传递函数可以独立确定,因而每个元件在系统中可作为一个单向性的方块来表示,而整个控制系统的方块图可按照系统中信号传递程序,用信号线依次将各方块连接而成。 系统方块图实质上已将原理图与数学模型结合起来,因而方块图也是系统的一种数学模型,它可以对系统进行全面的描述。利用各元件方块组成的系统方块图,通过等效变换后,可 图2-13 自动控制系统方块图 O ( a ) (b ) 图2-14 环节串联方框图
简化为一个等效方块图,从而求得系统的传递函数。 1.串联方块的等效 图2-14(a )所示的传递函数为 (s)G 1和(s)G 2两个方块,若(s)G 1的输出量作为(s)G 2的输人量,则(s)G 1和(s)G 2称为串联连接,图2-14(b )是它的等效方块图。从图2-14(a )得到 )()()(11s X s G s X i = )()()(12s X s G s X o = 所以 )()()()()()(21s X s G s X s G s G s X i i o == 因而 )()()(21s G s G s G = 即串联方块的等效方块的传递函数为各串联方块传递函数之积。 2.并联方块的等效 图2-15(a )所示传递函数分别为(s)G 1和(s)G 2两个方块,如果它们有相同的输人量,而输出量等于两个方块输出量的代数和,则(s)G 1和(s)G 2称为并联连接,图2-15(b )是它的等效方块图。 从图2-15中可见, )()()(22s X s G s X i = )()()(21s X s X s X o ±= 从而得到 )()()())()(()(21s X s G s X s G s G s X i i o =±= 因而 )()()(21s G s G s G ±= 所以并联方块的等效方块的传递函数为各并联方块传递函数之代数和。 3.方块图中反馈连接的等效 图2-16所示的具有反馈的方块图体现了自动控制系统的基本特点,其中(s)G 1称为前向传递函数, H(s)称为反馈传递函数。有 )()()(11s X s G s X o = )()()(s X s H s X o f = 图2-15 环节并联方框图 X i (s) )(s X o (a ) (b ) 图2-16 反馈环节方框图
第二章-自动控制原理习题集
2-1a 试证明图2-1(a)所示电气网络与图2-1(b)所示的机械系统具有相同的传递函数。 2-2a 试分别写出图2-2中各有源网络的传递函数U c (s)/U r (s)。 解: 图2-2(a )所示的有源网络传递函数U c (s)/U r (s)可以求得为, 2111121212/11*1//1)()(R R cs R R cs R cs R R cs R z z s U s U r c +=+=== 图2-2(b )示的有源网络传递函数U c (s)/U r (s)可以求得为, 1 /1*1//1)()(21212212+=+==cs R R R R R cs R cs R R cs s U s U r c 图2-2(c )所示的有源网络传递函数U c (s)/U r (s)可以求得为, cs R cs R R R cs s U s U r c 111211)()(+=+= (a) (c) (b) 图2-2 (a ) 图2-1 (b )
2-7c 设系统处于静止状态,当输入单位阶跃函数时其输出响应为 2()1t t y t e e --=-+ t>0 试求该系统的传递函数。 解 由题意可知:系统的初始条件为零,r(t)=1(t)于是R(s)= L[1(t )]=1/s 。对上述响应表达式的两边取拉氏变换,则有 211142()21(2)(1) s s Y s s s s s s s ++=-+=++++ 令Y (s )=G(s)R(s)=G(s)/s,由上式便可求得系统的传递函数为 2()42()()(2)(1) Y s s s G s R s s s s ++==++ 讨论 传递函数是线性定常单变量系统常用的输入输出模型,是经典控制理论的重要基础。求取传递函数的常用方法有下列四种:(1)根据系统的工作原理绘制结构图(或信号流图)来求取。(2)由系统的微分方程(或微分方程组)通过拉氏变换来导出。(3)根据系统响应表达式来推导,如本例;(4)由系统的状态空间表达式转换而得。 2-8a 系统的结构图如图2-10所示,试求该系统的输入输出传递函数。 说明 由结构图求系统的传递函数既可通过结构图化简也可以用梅森公式来计算,所得结果(即传递函数)是唯一的,但是结构图等效变换的方案则不是唯一的。而且等效性只保证总的输入输出关系(即传递函数)不变,而结构图内部则不等效,本题就是对此的一个实例说明。 解 (1) 结构图化简方案1 将G 3环节输出端的引出点前移并合并局部反馈环节,如图2-11(a)所示;然后进行串联和反馈的等效变换,如图2-11(b)和(c)所示;由图2-11 (c)通过并联的等效变换,则可求得系统的传递函数为 图2-10 系统结构图 (简记 G i (s)= G i ,H i (s)=H i ,R(s)=R ,Y(s)=Y) (a) (b)
教科版九年级物理上册 等效电路图练习
义务教育基础课程初中教学资料 等效电路训练题 1画出等效电路图 2画出等效电路图 3当闭合开关S 0、S 1,断开开关S 2时 当闭合开关S 2,断开开关S 0、S 1时 4当S 1、、S 2 均闭合且滑片P 滑到a 端时 当S 1、S 2 均断开且滑片P 在a 端时 图12 图39
5当闭合开关S1,断开开关S2和S3, 当闭合开关S1、S2,断开S3时 当闭合开关S3,断开S1、S2时 6、1、S2闭合,滑动变阻器的滑片P在a端时当S1、S2都断开,滑片P在b端时 S 7、合开关,滑动变阻器的滑片P在最左端时 3 S 只断开开关,滑片P移至最右端时 1 S 只闭合开关,滑片P在最右端时 1 8滑动变阻器的滑片P置于中点M,且只闭合开关S1时;动变阻器的滑片P置于B端,断开开关S1,闭合开关S2时;滑动变阻器的滑片P置于A端,闭合开关S1和开关S2时
图 25 9滑动变阻器的滑片P 在B 端,只闭合S 2时 滑片P 在B 端,开关都断开时 当滑片在A 端,只闭合S 1时 10所示,电源电压不变,滑动变阻器的滑片P 在中点c 和端点b 时,电压表的示数之比为3:2,求:(1)滑动变阻器的滑片P 在中点c 和端点b 时,电路中电流之比; (2)R 0与R ab 的比值。 11所示, 电源电压不变,电灯L 的电阻不变。开关S 闭合时,滑动变阻器的滑片P 在中点c 和端点b 时,电压表的示数之比为3:4。求:(1)滑动变阻器的滑片P 在中点c 和端点b 时,电路中电流之比(2).电灯L 的电阻与滑动变阻器ab 间的总电阻的比值等于多少? a c b
中考物理等效电路图复习
中考物理等效电路图复 习 TYYGROUP system office room 【TYYUA16H-TYY-
A 1 A 3 V A 2 R 1 R 2 R 3 1.画出等效电路图 2.画出等效电路图 3.当闭合开关S 0、S 1,断开开关S 2时;当闭合开关S 2,断开开关S 0、S 1时 4.当S 1、、S 2 均闭合且滑片P 滑到a 端 时;当S 1、S 2 均断开且滑片P 在a 端时 5.当闭合开关S 1,断开开关S 2和S 3;当闭合开关S 1、S 2,断开S 3时;当闭合开关S 3,断开S 1 、S 2时; 6.当S 1、S 2闭合,滑动变阻器的滑片P 在a 端 时,当S 1、S 2都断开,滑片P 在b 端时; 7.只闭合开关3S ,滑动变阻器的滑片P 在最左端时 只断开开关1S ,滑片P 移至最右端时 只闭合开关1S ,滑片P 在最右端时 V 2 V 1 A R 1 R 2 P S 图2 S V A L 1 L 2 S 0 S 1 S 2 R 3 R 4 图3 图4 a V A 1 A 2 S 1 S 2 R 2 R 1 L b
图2 1.将滑动变阻器的滑片P 置于中点M ,且只闭合开关S 1时 将滑动变阻器的滑片P 置于B 端,断开开关S 1,闭合开关S 2时 将滑动变阻器的滑片P 置于A 端,闭合开关S 1和开关S 2时 2.当滑动变阻器的滑片P 在B 端,只闭合S 2时 滑片P 在B 端,开关都断开时 当滑片在A 端,只闭合S 1时 1.如图所示,电源电压不变,滑动变阻器的滑片P 在中点c 和端点b 时,电压表的示数之 比为3:2,求: (1)滑动变阻器的滑片P 在中点c 和端点b 时,电路中电流之比; (2)R 0与R ab 的比值。 2.如图所示, 电源电压不变,电灯L 的电阻不变。开关S 闭合时,滑动变阻器的滑片P 在中点c 和端点b 时,电压表的示数之比为3:4。求:(1)滑动变阻器的滑片P 在中点c 和端点b 时,电路中电流之比 a c b
第二章习题与解答
2 控制系统的数学模型 2-1 试求题图2-1所示各信号)(t x 的象函数)(s X 。 解: (a )Θ)(2)(0t t t x -+= ∴)(s X = s t e s s 0212-+ (b )Θ) ())(())(()(321t t c t t c b t t a b a t x -------+= ∴ )(s X = ])()([1 321s t s t s t ce e c b e a b a s -------+ (c )Θ)(t x = )(4)2(4)2(442 222T t T T t T T t T t T -+---- ∴ )21(4)(2 22Ts s T e e s T s X --+-= 2-2 求下列各拉氏变换式的原函数。 (1) 1 )(-=-s e s X s (2) )3()2(1 )(3 ++= s s s s X (3) ) 22(1 )(2+++=s s s s s X 解: (1) 1 )(-=t e t x
(2) 原式 = ) 3(31 241)2(83)2(41)2(212 3++++-+++-s s s s s ∴x (t )= 24 1 31834432222++-+-----t t t t e e e t e t (3) 原式 =1 )1(1211)1(121212221 21222++?++++?-=++-s s s s s s s s ∴)(t x = )cos (sin 2 121t t e t -+- 2-3 试建立题图2-2所示各系统的微分方程。其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。 解: (a ) 以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响), 如图解2-2(a)所示。根据牛顿定理可写出 22)()(dt y d m dt dy f t ky t F =-- 整理得 )(1 )()()(2 2t F m t y m k dt t dy m f dt t y d =++ (b )如图解2-2(b)所示,取A,B 两点分别进行受力分析对 A 点有 )()(111dt dy dt dx f x x k -=- (1) 对B 点有 y k dt dy dt dx f 21)( =- (2) 联立式(1)、(2)可得:
第二章补充习题
1. 试用结构图等效化简求图2-32所示各系统的传递函数 ) () (s R s C . 解 (a )
所以: 4 32132432143211)() (G G G G G G G G G G G G G G s R s C ++++= (b ) 所以: H G G G s R s C 22 11)()(--= (c ) 2. 试用梅逊增益公式求上题中各结构图对应的闭环传递函数。 解 (a )图中有1条前向通路,3个回路,有1对互不接触回路 ,,,2111432111G G L G G G G P -==?=
,,,21321323432)(1L L L L L G G L G G L +++-=?-=-= 4 32132432143211 11)()(G G G G G G G G G G G G G G P s R s C ++++=??= (b )图中有2条前向通路,1个回路 ,,,,,H G L G P G P 2122211111 ==?-==?= 11L -=? H G G G P P s R s C 22 122111)()(--= ??+?= (c )图中有1条前向通路,3个回路 ,,,211132111G G L G G G P -==?= ,,,)(132********L L L G G G L G G L ++-=?-=-= 3 2132213211 11)()(G G G G G G G G G G P s R s C +++=??=
3. 求图中系统从v 到y的传递函数。 解:
自动控制原理C作业(第二章)答案
第二章控制系统的数学模型 2.1RC无源网络电路图如图2-1所示,试采用复数阻抗法画出系统结构图,并求传递 函数U c(s)/U r(s)。 图2-1 解:在线性电路的计算中,引入了复阻抗的概念,则电压、电流、复阻抗之间的关系,满足广义的欧姆定律。即: ) ( ) ( ) ( s Z s I s U = 如果二端元件是电阻R、电容C或电感L,则复阻抗Z(s)分别是R、1/C s或L s。 (1)用复阻抗写电路方程式: s C S I S V R S U S U S I s C S I S I S U R S U S U S I c c c c C r 2 2 2 2 2 1 2 1 2 1 1 1 1 1 1 ) ( ) ( 1 )] ( ) ( [ ) ( 1 )] ( ) ( [ ) ( 1 )] ( ) ( [ ) ( ? = - = ? - = ? - = (2)将以上四式用方框图表示,并相互连接即得RC网络结构图,见图2-1(a)。 2-1(a)。 (3)用梅逊公式直接由图2-1(a)写出传递函数U c(s)/U r(s) 。 ? ? = ∑K G G K 独立回路有三个:
S C R S C R L 11111 11-= ?- = S C R S C R L 22222111-=?- = 回路相互不接触的情况只有L 1和L 2 两个回路。则 2 221121121S C R C R L L L = = 由上式可写出特征式为: 2 2211122211213211 1111)(1S C R C R S C R S C R S C R L L L L L ++++ =+++-=? 通向前路只有一条 2 21212211111111S C C R R S C R S C R G =???= 由于G 1与所有回路L 1,L 2, L 3都有公共支路,属于相互有接触,则余子式为 Δ1=1 代入梅逊公式得传递函数 1 )(1 111111 21221122121222111222112 221111++++=++++= ??=s C R C R C R s C C R R s C R C R s C R s C R s C R s C R C R G G 2-2 已知系统结构图如图2-2所示,试用化简法求传递函数C (s )/R (s )。 图2-2 解:(1)首先将含有G 2的前向通路上的分支点前移,移到下面的回环之外。如图2-2(a )所示。 (2)将反馈环和并连部分用代数方法化简,得图2-2(b )。 (3)最后将两个方框串联相乘得图2-2(c )。 S C R R S C L 12213111-= ?- =
第二章习题及答案78529
第二章 控制系统的数学模型 练习题及答案 2-1 试建立图2-27所示各系统的微分方程。其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。 解 (a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。根据牛顿定理可写出 22)()(dt y d m dt dy f t ky t F =-- 整理得 )(1 )()()(2 2t F m t y m k dt t dy m f dt t y d =++ (b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。对A 点有 )()(111dt dy dt dx f x x k -=- (1) 对B 点有 y k dt dy dt dx f 21)( =- (2) 联立式(1)、(2)可得: dt dx k k k y k k f k k dt dy 2112121)(+=++
(c) 应用复数阻抗概念可写出 )()(11 )(11 s U s I cs R cs R s U c r ++ = (3) 2 )()(R s Uc s I = (4) 联立式(3)、(4),可解得: Cs R R R R Cs R R s U s U r c 212112) 1()()(+++= 微分方程为: r r c c u CR dt du u R CR R R dt du 1 21211 +=++ (d) 由图解2-1(d )可写出 [] Cs s I s I s I R s U c R R r 1 )()()()(++= (5) )()(1 ) (s RI s RI Cs s I c R c -= (6) []Cs s I s I R s I s U c R c c 1 )()()()(++= (7) 联立式(5)、(6)、(7),消去中间变量)(s I C 和 )(s I R ,可得: 1312)()(2 22222++++=RCs s C R RCs s C R s U s U r c 微分方程为 r r r c c c u R C dt du CR dt du u R C dt du CR dt du 222222221 213++=++ 2-2 试证明图2-28中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式 的数学模型)。 解 (a) 取A 、B 两点分别进行受力分析,如图
第二章习题与解答
2 控制系统的数学模型 2-1 试求题图2-1所示各信号)(t x 的象函数)(s X 。 解: (a )Θ)(2)(0t t t x -+= ∴)(s X = s t e s s 0212-+ (b )Θ) ())(())(()(321t t c t t c b t t a b a t x -------+= ∴ )(s X = ])()([1 321s t s t s t ce e c b e a b a s -------+ (c )Θ)(t x = )(4)2(4)2(442 222T t T T t T T t T t T -+---- : ∴ )21(4)(2 22Ts s T e e s T s X --+-= 2-2 求下列各拉氏变换式的原函数。 (1) 1 )(-=-s e s X s (2) )3()2(1 )(3++= s s s s X (3) ) 22(1 )(2 +++=s s s s s X 解: (1) 1 )(-=t e t x 题图2-1 信号图
(2) 原式 = ) 3(31 241)2(83)2(41)2(212 3++++-+++-s s s s s ∴x (t )= 24 1 31834432222++-+-----t t t t e e e t e t ¥ (3) 原式 =1 )1(1211)1(121212221 21222++?++++?-=++-s s s s s s s s ∴)(t x = )cos (sin 2 121t t e t -+- 2-3 试建立题图2-2所示各系统的微分方程。其中外力)(t F ,位移)(t x 和电压)(t u r 为输入量;位移)(t y 和电压)(t u c 为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数。 解: (a ) 以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响), 如图解2-2(a)所示。根据牛顿定理可写出 22)()(dt y d m dt dy f t ky t F =-- … 整理得 )(1 )()()(2 2t F m t y m k dt t dy m f dt t y d =++ (b )如图解2-2(b)所示,取A,B 两点分别进行受力分析对A 点有 )()(111dt dy dt dx f x x k -=- (1) 对B 点有 题图2-2 系统原理图 图解2-2(a ) 图解2-2(b )
第二章:实数知识结构图
第二章:实数知识结构图 一、实数的概念及分类 1、实数的分类 正有理数 有理数 零有限小数和无限循环小数实数 负有理数正无理数无理数 无限不循环小数负无理数 2、无理数:无限不循环小数叫做无理数。 在理解无理数时,要抓住“ 无限不循环”这一实质,归纳起来有四类:(1)开方开不尽的数,如32,7等; (2)有特定意义的数,如圆周率 π,或化简后含有π的数,如3π+8等;(3)有特定结构的数,如 0.1010010001…等;(4)某些三角函数值,如 sin60o 等。二、实数的倒数、相反数和绝对值 1、相反数实数与它的相反数是一对数(只有符号不同的两个数叫做互为相反数,零的相反数是零),从数轴上看,互为相反数的两个数所对应的点关于原点对称,如果 a 与 b 互为相反数,则有a+b=0,a=-b ,反之亦成立。 2、绝对值 在数轴上,一个数所对应的点与原点的距离,叫做该数的绝对值。 (|a|≥0)。零的绝对值是它本身,也可看成它的相反数,若 |a|=a ,则a ≥0;若|a|=-a ,则a ≤0。3、倒数 如果a 与b 互为倒数,则有 ab=1,反之亦成立。1和-1的倒数等于本身。零没有倒数。4、数轴 规定了原点、正方向和单位长度的直线叫做数轴(画数轴时,要注意上述规定的三要素缺一不可)。实数与数轴的点是一一对应的。 三、平方根、算数平方根和立方根 1、算术平方根:一般地,如果一个正数 x 的平方等于a ,即x 2=a ,那么这个正数x 就叫做a 的算术平方根。特别地,0的算术平方根是 0。表示方法:记作“a ”,读作根号a 。 性质:正数和零的算术平方根都只有一个,零的算术平方根是零。 2、平方根:一般地,如果一个数 x 的平方等于a ,即x 2=a ,那么这个数x 就叫做a 的平方根(或二次 方根)。 表示方法:正数a 的平方根记做“a ”,读作“正、负根号a ”。性质:一个正数有两个平方根,它们互为相反数;零的平方根是零;负数没有平方根。 3、开平方:求一个数a 的平方根的运算,叫做开平方。
(完整word版)结构图等效变换举例
例1电枢控制式直流电动机结构图化简 ------- — Cm R{ Jm^ + fin ) 1 ?in —1 ―■- S Cm Ce 丄十 R(J in s + f m ) U Cm rr --- R(J in Si + fm) + CmCe s fin ?tn S [RJ m S+Rljn+ Cm JmS + fin RJm S + 1 S Rfin+CmCe
例2函数记录仪结构图化简 Axz i — I % ■?——? — *? 」?_卜 LUJ 7>十1 1 —— 岭 I 可- -------------------------------------------- 函数记录仪方框图 V+1 S L --- ? 1 + f 殳 F 矿、 淬斗 A_p 十 〔 g J V+1 吗 Au —*-0——
L % —— 匕心(心盼岛丢疋4) L — 十(&?心十址十圧忌匾乙心IF ? 例3结构图化简 _ ;- 1H A-------- 0*1 ]*o->| 厲r6 ■ 6 _—?o ■q1?他T?偽”■ T R工卜 H\十 R
R G4 丄G5G6 11+G2G3H2I+G J G^H S 比- R ------- △門GG疗f I+G2G3H2 G4 I+G4G5 Hs R G5G4 G J C;2-?O *■ A (1+ Gi G S H2)(I+G4G5H3) R G1G2H1G5G6+H4 - R
R qgG/q e ―? 1 + Gj±H Q+G A(J5H3-绻乞乩 + qG/GgG^GjGf E + 兄乩 例4结构图化简 」回 t ----- d a C⑸ —