激光雷达高速数据采集系统解决方案

高速数据采集系统设计
高速数据采集系统 设计
基于FPGA和SoC单片机的 高速数据采集系统设计 一.选题背景及意义 随着信息技术的飞速发展,各种数据的实时采集和处理在现代工业控制和科学研究中已成为必不可少的部分。高速数据采集系统在自动测试、生产控制、通信、信号处理等领域占有极其重要的地位。随着SoC单片机的快速发展,现在已经能够将采集多路模拟信号的A/D转换子系统和CPU核集成在一片芯片上,使整个数据采集系统几乎能够单芯片实现,从而使数据采集系统体积小,性价比高。FPGA为实现高速数据采集提供了一种理想的实现途径。利用FPGA高速性能和本身集成的几万个逻辑门和嵌入式存储器块,把数据采集系统中的数据缓存和控制电路全部集成在一片FPGA芯片中,大大减小了系统体积,提高了灵活性。FPGA 还具有系统编程功能以及功能强大的EDA软件支持,使得系统具有升级容易、开发周期短等优点。 二.设计要求 设计一高速数据采集系统,系统框图如图1-1所示。输入模拟信号为频率200KHz、Vpp=0.5V的正弦信号。采样频率设定为25MHz。经过按键启动一次数据采集,每次连续采集128点数据,单片机读取128点数据后在LCD模块上回放显示信号波形。
图1-1 高速数据采集原理框图 三.整体方案设计 高速数据采集系统采用如图3-1的设计方案。高速数据采集系统由单片机最小系统、FPGA最小系统和模拟量输入通道三部分组成。输入正弦信号经过调理电路后送高速A/D转换器,高速A/D 转换器以25MHz的频率采样模拟信号,输出的数字量依次存入FPGA内部的FIFO存储器中,并将128字节数据在LCD模块回放显示。 图3-1 高速数据采集系统设计方案 四.硬件电路设计 1.模拟量输入通道的设计 模拟量输入通道由高速A/D转换器和信号调理电路组成。信号调理电路将模拟信号放大、滤波、直流电平位移,以满足A/D转换器对模拟输入信号的要求。
激光雷达高速数据采集系统解决方案
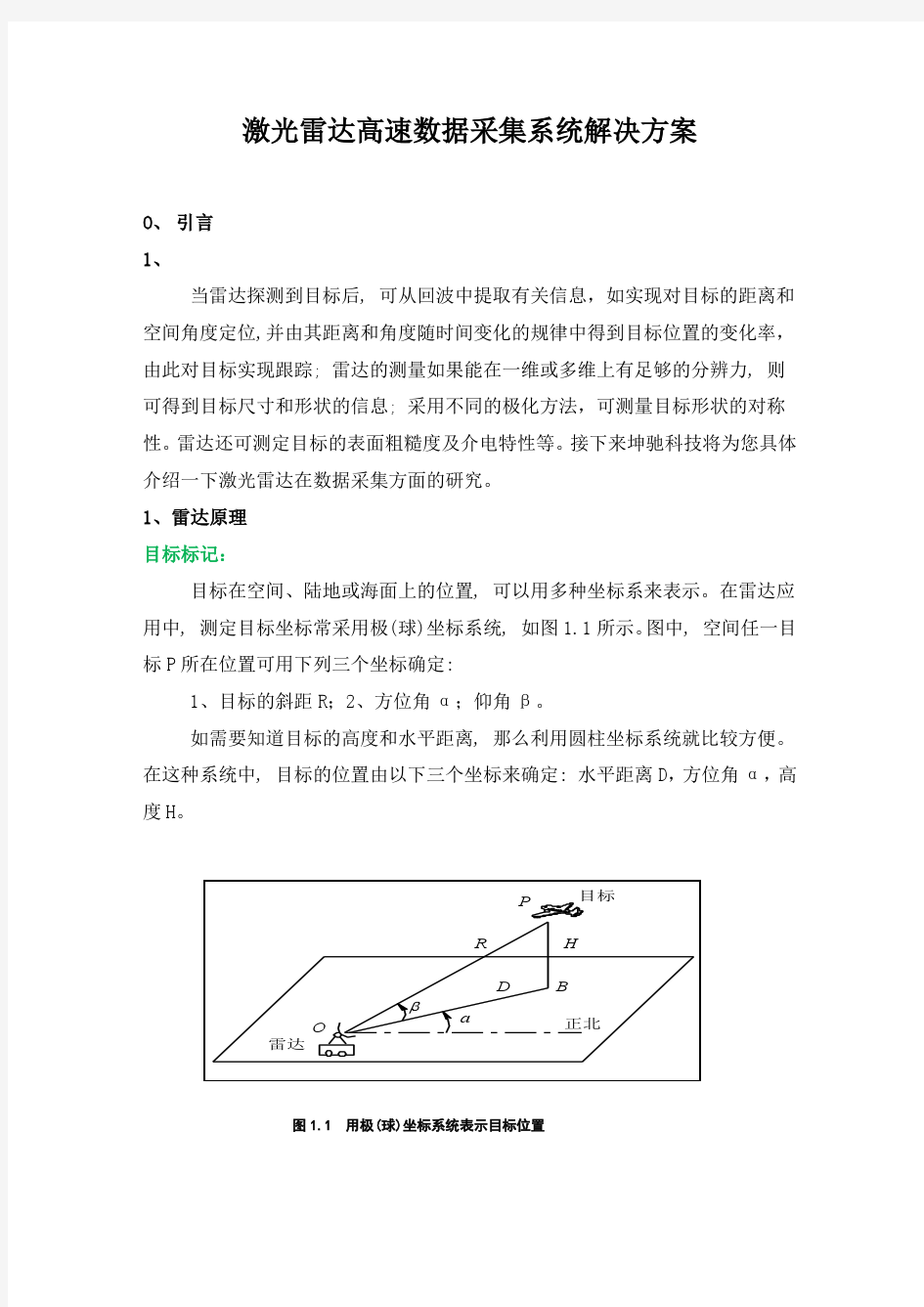
激光雷达高速数据采集系统解决方案 0、引言 1、 当雷达探测到目标后, 可从回波中提取有关信息,如实现对目标的距离和空间角度定位,并由其距离和角度随时间变化的规律中得到目标位置的变化率,由此对目标实现跟踪; 雷达的测量如果能在一维或多维上有足够的分辨力, 则可得到目标尺寸和形状的信息; 采用不同的极化方法,可测量目标形状的对称性。雷达还可测定目标的表面粗糙度及介电特性等。接下来坤驰科技将为您具体介绍一下激光雷达在数据采集方面的研究。 1、雷达原理 目标标记: 目标在空间、陆地或海面上的位置, 可以用多种坐标系来表示。在雷达应用中, 测定目标坐标常采用极(球)坐标系统, 如图1.1所示。图中, 空间任一目标P所在位置可用下列三个坐标确定: 1、目标的斜距R; 2、方位角α;仰角β。 如需要知道目标的高度和水平距离, 那么利用圆柱坐标系统就比较方便。在这种系统中, 目标的位置由以下三个坐标来确定: 水平距离D,方位角α,高度H。 图1.1 用极(球)坐标系统表示目标位置
系统原理: 由雷达发射机产生的电磁能, 经收发开关后传输给天线, 再由天线将此电磁能定向辐射于大气中。电磁能在大气中以光速传播, 如果目标恰好位于定向天线的波束内, 则它将要截取一部分电磁能。目标将被截取的电磁能向各方向散射, 其中部分散射的能量朝向雷达接收方向。雷达天线搜集到这部分散射的电磁波后, 就经传输线和收发开关馈给接收机。接收机将这微弱信号放大并经信号处理后即可获取所需信息, 并将结果送至终端显示。 图1.2 雷达系统原理图 测量方法 1).目标斜距的测量 雷达工作时, 发射机经天线向空间发射一串重复周期一定的高频脉冲。如果在电磁波传播的途径上有目标存在, 那么雷达就可以接收到由目标反射回来的回波。由于回波信号往返于雷达与目标之间, 它将滞后于发射脉冲一个时间tr, 如图1.3所示。 我们知道电磁波的能量是以光速传播的, 设目标的距离为 R, 则传播的距离等于光速乘上时间间隔, 即2R=ct r 或 2 r ct R
星载大光斑激光雷达波形数据处理方法初探
星载大光斑激光雷达波形数据处理方法初探 周朗明 武汉大学遥感信息工程学院,湖北武汉 (430079) E-mail :zlm_mj@https://www.360docs.net/doc/4b18297389.html, 摘 要:激光雷达技术是近年发展十分迅速的一种新型数字传感器测图技术,在快速获取地表三维数据方面具有独特优势。商业机载LIDAR 系统提供给用户的产品一般是点云数据,实际上,波形数据能有效的表达光斑内的地物高程分布,提供更高精度的点云数据。本文以搭载在ICESat 卫星上的GLAS 传感器获取的GLA01波形数据为实验数据,对大光斑LIDAR 波形数据的格式及处理方法进行了初步探讨,提出了一种简化的针对大光斑波形数据处理的方案,实现了一种细化波峰位置的高程量化算法。 关键词:LIDAR ;波形数据;波形量化;GLAS ;ICESat 中图分类号:P231;P236;P237 1. 引 言 空载(包括机载和星载)LIDAR 技术作为一种激光测高系统,是以激光脉冲发射器作为辐射源,向植被和地表发射激光脉冲,通过记录发射信号和接收回波信号的强度信息以及发射和接收时刻的时间延迟来计算传感器和地物目标之间的距离。波形数据由时刻信息及某一时刻所接收的回波信号能量构成,对波形数据进行滤波、分解和量化等处理可得到地面目标的高程信息。从某种意义上来讲,波形数据是LIDAR 系统的原始数据,在波形数据的基础之上结合GPS/IMU 可得到精准表达地物目标三维信息的点云数据,即波形数据能提供地物目标的高程值(Z 坐标)及强度(I),GPS/IMU 能提供地物目标在某一参考坐标系下的平面坐标(XY)。 国内外专家利用激光雷达波形数据对林业管理方面进行研究。Wenge 等研究激光波形与林冠层参数之间的关系,并指出激光波形数据对于三维林冠层结构参数的获取十分必要[1]。庞勇等对星载大光斑激光雷达波形数据(GLAS)的波形关键参数的计算进行研究[2] ,并利用我国东北地区星载激光雷达波形数据,阐述了数据预处理和波形长度计算方法,分析了东北地区波形长度的分布格局和林业应用潜力,并利用土地覆盖数据进行了验证[3]。 2. GLAS/ICESat 星载LIDAR 系统 GLAS 英文全称为Geoscience Laser Altimeter System ,国内有学者将其译为地球科学激光 高度计[4]。 GLAS 系统由美国航天局的戈达德宇航中心(NASA/GSFC)研制,采用diode pumped Q-switched Nd:YAG 激光器,该激光器能以每秒40次的频率发射两种波长的脉冲信号:1064nm 的近红外信号和534nm 的可见光信号。前者用于地表高程和密云高度的测量,后者用于测量云层和大气的垂直分布。GLAS 系统的技术指标如表1.1所示: 表1.1 GLAS 系统的技术指标 [2] Tab.1.1 Technical indexes of GLAS system 波长(nm) 脉冲重复频率(HZ) 光斑尺寸(m)光斑间隔(m) 测距精度 被测对象 532 40 70 170 云:75~200m(垂直) /150m(水平)气溶胶: 50km 云层、气溶胶1064 40 70 170 冰层/陆地:10cm 冰、陆地
利用激光点云数据计算采石场开采量方法研究
利用激光点云数据计算采石场开采量方法研究 发表时间:2018-08-09T10:41:29.817Z 来源:《新材料.新装饰》2018年2月下作者:李光 [导读] 为了调查矿山开采现状,估算矿山保有资源量,政府定期要对采石场资源储量进行核实。一般采用免棱镜全站仪进行测量评估,但因地形复杂,测量误差难以避免。而激光扫描技术克服了这些缺点,为储量监测提供了快捷的途径。应用激光扫描技术在土方量计算、矿山地形快速测量、土方变化量监测等方面一些学者进行了系统研究。 (齐齐哈尔矿产勘察开发总院,黑龙江省齐齐哈尔市 161000) 摘要:为了调查矿山开采现状,估算矿山保有资源量,政府定期要对采石场资源储量进行核实。一般采用免棱镜全站仪进行测量评估,但因地形复杂,测量误差难以避免。而激光扫描技术克服了这些缺点,为储量监测提供了快捷的途径。应用激光扫描技术在土方量计算、矿山地形快速测量、土方变化量监测等方面一些学者进行了系统研究。使用三维激光扫描仪对矿堆进行了扫描,对扫描数据进行三维建模后测算矿堆的矿方量。本文分析了利用激光点云数据计算采石场开采量方法。 关键词:激光点云数据;计算采石场;开采量方法; 利用三维激光扫描技术可以获得高密度点云数据进行体积计算,解决了复杂矿山开采与储量的测量精度问题。近年来国内一些学者进行了相关研究,基于三维激光扫描技术的土方量算满足精度要求,给出了在土方量算应用中的相关定量指标。目前采用地面三维激光扫描技术针对采石场的开采量变化研究非常少,计算方法也不太相同。 一、点云数据获取 某采石场开采量的详细数据为了达到扫描的目的和精度要求,结合采石场的环境和地形本身复杂的结构特点,扫描仪获取数据的特点,决定采用全站仪模式对采石场进行扫描?为了保证前后两期坐标的一致性,两期数据都是利用RTK 测量控制点坐标?根据采石场的地形和范围,根据地形情况,将扫描路线设置为闭合导线,共有导线点12 个,每站架设仪器进行扫描,采用中等分辨率 (10 cm/100 m),每站操作时间大约为30 min ,大约测量7 h完成采石场的数据采集工作?一是噪声处理与范围的统一?将扫描的激光点云数据导入随机数据处理软件Cyclone ,对软件自动拼接的点云数据进行质量检查,证明点云数据完整可用。利用软件去噪功能,通过放大与旋转操作,对研究区域外点云粗略删除。计算采石场开采量利用RTK 测量的数据与三维激光扫描的点云数据进行对比,在进行数据处理时,要保证两者范围的一致性,主要以地形图数据为基准,利用CASS 软件确定范围边界线,将处理后的数据保存为txt 格式文件,再导入Cyclone软件,删除研究区域范围以外的点云数据?二是点云数据均一化处理?为了地形图数据精度上大致保持相同,对三维激光扫描的数据进行抽稀处理?在Cyclone软件中,对点云数据进行均一化处理?为了与传统方法保持精度基本一致,便于数据间的研究对比,确定点云间隔为5 m 进行点云均一化处理(见图2)?三是点云数据的精简?利用Cyclone 软件对点云数据去噪处理后,点云数据仍然存在一些噪声点?体外孤点等影响点云质量的因素,可以采用Geomagic 软件进行点云数据的精简?将Cyclone 软件处理得到的结果保存为xyz 格式文件,在Geomagic 软件进行数据精简的主要过程:“数据导入— 点云数据着色—去除体外孤点及非连接项—减少噪音—数据采样— 数据封装”,将处理后的数据保存为vtx 格式文件? 二?利用激光点云数据计算采石场开采量方法 1. 开采量的方法?为了获取采石场两期间进行精确计算的开采量,要对采石场的开采区域范围进行精确的确定,根据点云数据的范围来确定矿山采集区域的模型的区域范围,从而确保建立的矿山采集区域模型范围与实际矿山范围尽量一致来保证矿山开采量的准确性?一是Cyclone 软件求取开采量?Cyclone 软件是具有处理点云数据与建模的功能?依据Cyclone软件提供的计算体积的功能,不能将两期的数据直接进行叠加求差值,需要分别计算每期的体积,然后求差,差值即为采石场开采量?Cyclone 软件求取体积的主要技术:将Geomagic 精简处理后的vtx格式文件后缀修改为txt 格式,然后打开文件,选择所有点云数据,创建TIN 模型;执行命令,软件自动计算点云到参考面的挖方量和填方量,其中挖方量(Cut V olume)为1252641 m3即为计算开采量所需要的数据?因为两期数据计算挖方量的差值为开采量,要求取数据的挖方量,因为提供的数据文件格式是dat 格式,将dat 格式的文件转换为txt 格式,再导入Cyclone 软件,按照以上方法,计算挖方量为1006949 m3 ,将两期的挖方量求差值即为采石场开采量,?二是HD‐3LS‐SCENE 软件求取开采量?HD‐3LS‐SCENE软件支持点云渲染?点云选择?量测分析?堆体体积计算?此次研究主要是根据需求以及数据的密度,设置网格大小,求取每一期堆体体积,然后做差,差值即为采石场的开采量?HD‐3LS‐SCENE 软件主要技术思路:将Geomagic 精简处理后的格式文件后缀修改为txt 格式,再用Cyclone 软件打开,保存为xyz 格式文件?利用导入经Cyclone软件处理后的xyz 格式文件,保存为文件,再打开格式文件,转换为格式文件,通过软件加载格式文件,点击菜单中“点云分析”设置投影点云参数生成DEM ,求取体积,将格式的数据利用Excel 表格处理转换为txt 格式文件,再导入Cyclone 软件,然后保存为xyz 格式文件,按照上述求取体积的步骤求取地形图数据的体积,三是CASS 软件求取开采量?CASS 软件一套集地形?地籍?空间数据建库?工程应用?土石方量算等功能为一体的软件系统?CASS 提供了多种土方计算方法,对不同工程条件可灵活地采用合适的土方计算模型?CASS 软件主要技术思路是:将Geomagic 精简保存的5m点云数据vtx 格式文件后缀修改为格式,再利用Excel 表格将格式文件转换为dat 格式文件保存,利用CASS 软件打开格式文件,将数据转换为格式文件,根据利用CASS 软件将数据转换为格式文件?在CASS 软件选择DTM 法计算两期土方? 2.开采量计算结果分析?针对以上计算结果,从计算开采量的技术可行性?计算的精度?软件操作的难易程度等方面进行对比分析?针对三种软件的性能及计算开采量结果的精度,详细的对比分析阐述如下:1)Cyclone 软件?Cyclone 软件是具有较高知识产权的随机数据处理软件,普通用户获取难?该软件的界面与软件说明书都是英文的,如果没有专门的培训或相关人员的指导,软件使用上比较困难?操作步骤比较繁琐,软件功能比较强大,能够计算采石场开采量?Cyclone在计算开采量方面误差较小?对比三种软件可知:Cyclone 软件在求取开采量方面精度最高,满足工程测量需要?2)HD‐3LS‐SCENE 软件?HD‐3LS‐SCENE 软件在获取方面比较困难,正版软件花费较高,软件试用期都是短暂的?软件操作上比较复杂,计算时间需要40 min ,在三种软件中计算速度最慢?在精度方面相比于其他两个软件,在相同的条件下,精度最低,因此在对精度要求不是很高的情况下,能够使用HD‐3LS‐SCENE 软件计算开采量?3)CASS 软件?该软件运用比较普遍,能够识别多种格式的数据文件?该软件操作简单快捷,在短时间内求取土方量,而且在求取两期土方量的过程中,实现一步到位,减少了后期大量的手工计算。在计算精度方面,CASS 软件获取较高的精度,所以在精度要求不是很高的情况下,CASS软件能够快速求取体积,作为优先考虑的软件。 通过对采石场开采量计算结果表明:利用激光点云数据的采石场开采量计算技术可行、精度满足工程需要。Cyclone 软件使用难度大,
无人机激光雷达扫描系统
Li-Air无人机激光雷达扫描系统 Li-Air无人机激光雷达扫描系统可以实时、动态、大量采集空间点云信息。根据用户不同应用需求可以选择多旋翼无人机、无人直升机和固定翼无人机平台,可快速获取高密度、高精度的激光雷达点云数据。 硬件设备 Li-Air无人机激光雷达系统可搭载多种类型扫描仪,包括Riegl, Optech, MDL, Velodyne等,同时集成GPS、IMU和自主研发的控制平台。 图1扫描仪、GPS、IMU、控制平台 无人机激光雷达扫描系统设备参数见表格1: 表格 1 Li-Air无人机激光雷达扫描系统 图2 八旋翼无人机激光雷达系统图3 固定翼无人机激光雷达系统 设备检校
公司提供完善的设备检较系统,在设备使用过程中,定期对系统的各个组件进行重新标定,以保证所采集数据的精度。 图1扫描仪检校前(左)扫描仪检校后(中)检校前后叠加图(右) 图4(左)为检校前扫描线:不连续且有异常抖动;图4(中)为检校后扫描线:数据连续且平滑变化;图4(右)为检校前后叠加图,红线标记的部分检校效果对比明显。 图5从左至右依次为校正前(侧视图)、校正后(侧视图)、叠加效果图图5(左)为检校前扫描线:不在同一平面;图4(中)为检校后扫描线:在同一平面;图4(右)为检校前后叠加图。 成熟的飞控团队 公司拥有成熟的软硬件团队以及经验丰富的飞控手,保证数据质量以及设备的安全性,大大节约了外业成本和时间。
图6无人机激光雷达系统以及影像系统 完善的数据预处理软件 公司自主研发的无人机系统配备有成套的激光雷达数据预处理软件Li-Air,该软件可对无人机实时传回的激光雷达数据进行航迹解算、数据生成、可视化等。 图7 Li-Air数据预处理功能 成功案例 2014年7月,本公司利用Li-Air无人机激光雷达扫描系统进行中关村软件园园区扫描项目,采集园区高清点云以及影像数据。飞行高度200m,点云密度约50点/平方米,影像地面分辨率为5cm。通过POS数据解算,完成对点云和影像数据的整合,得到地形信息和DOM等。
高速数据采集系统
目录 1系统摘要 (2) 2系统设计理论 (2) 3系统设计方案 (4) 3.1AD7891高速数据采集系统 (4) 3.1.1 AD7891结构及功能 (4) 3.1.2工作时序和极限参数 (5) 3.1.3 AD7891的应用 (6) 3.1.4 AD7891与微处理器的接口 (8) 3.2PCI-1714高速数据采集系统……………………………….…,,,.9 3.2.1 PCI- 1714 功能结构和特点 (9) 3.2.2 PCI- 1714的系统构成..............................,.. (10) 3.3基于AT89C51的数据采集通信系统设计 (12) 3.3.1系统硬件设计 (12) 3.3.2系统软件设计 (14) 4各种方案的比较 (16) 5心得体会 (17) 6参考文献 (18)
1.系统简介 随着数字技术的飞速发展,高速数据采集系统也迅速地得到了广泛的应用。在生产过程中,应用这一系统可以对生产现场的工艺参数进行采集、监视和记录,为提高生产质量,降低成本提供了信息和手段。在科学研究中,应用数据采集系统可以获取大量的动态数据,是研究瞬间物理过程的有力工具,为科学活动提供了重要的手段。而当前我国对高速数据采集系统的研究开发都处于起步阶段,因此,开发出高速数据采集系统就显得尤为重要了。 所谓高速数据采集系统,是用计算机控制的多路数据自动检测或巡回检测(其对象包括数字和模拟信号),并且能够对数据实行某些处理(包括存储、处理、分析计算以及从检测的数据中提取可用的信息),以供显示、记录、打印或描绘的系统。 在数字技术日新月异的今天,数据采集技术的重要性是十分显著的。它是数字世界和外部物理世界连接的桥梁。而随着现代工业和科学技术的发展,对数据采集技术的要求日益提高,在雷达、声纳、图像处理、语音识别、通信、信号测试等科研实践领域中,都需要高精度,高数据率的数据采集系统。它的关键技术为高速高精度的ADC 技术,高数据率的存储和缓存技术以及系统高可靠性保证等。通过数据采集技术,科研人员在实验现场可以根据需要实时记录原始数据,用于实验室后期的分析和处理,对工程实践和理论分析探索具有重大意义。 2.系统设计理论 整个高速数据系统主要分为四个部分:数据采集部分、数据控制部分、数据处理部分、数据传输部分。 在数据采集部分,主要应用的就是采样定理、模数转换器ADC 及A/D 转换技术。采用定理说明采样频率与信号频谱之间的关系,是连续信号离散化的基本依据。具体内容是,频带为F 的连续信号f(t)可用一系列离散的采样值)1(t f ,)1(t t f ?±,)1(t t f ?±,……来表示,只要这些采样点的时间间隔F t 21≤?,便可根据各采样值完全恢复原来的信号)(t f 。模数转换器ADC 用来把连续变化的模拟信号转换为一定格式的数字量。ADC 转换器实际上就是一个编码器,输
一种高速数据采集系统的研究
第31卷第5期 唐山师范学院学报 2009年9月 Vol. 31 No. 5 Journal of Tangshan Teachers College Sep. 2009 ────────── 收稿日期:2008-12-12 作者简介:李洋(1982-),男,河北衡水人,唐山师范学院基础教育部教师。 -66- 一种高速数据采集系统的研究 李 洋,郭小松 (唐山师范学院 基础教育部,河北 唐山 063000) 摘 要:由于高速数据采集对信号完整性、信号干扰、高速布线及数据处理和高速实时存储要求极高,而其应用环境又往往非常复杂,所以在目前的实际应用中,很难实现一种既能进行长时间高速数据采集、又能进行大容量存储的数据采集系统。在此背景下,提出了一种高速数据采集及存储的解决方案,采用高速FPGA 加嵌入式微处理器作为中央处理器来进行高速数据传输和磁盘阵列数据存储,实现高速数据采集及大容量实时存储。 关键词:数据采集;模数转换;海量存储;RAID0 中图分类号: T N919.5 文献标识码:A 文章编号:1009-9115(2009)05-0066-03 Study of High-Speed Data Acquisition and Storage System LI Yang, GUO Xiao-song (Department of Foundation Education, Tangshan Teachers College, Tangshan Hebei 063000, China) Abstract: Because of the extreme requirements of signal integrity, noise jamming, high-speed layout, high-speed real-time storage and the complex application environments, it is very difficult to realize a high-speed data acquisition system which is suitable for long-time data acquisition and mass storage. Against this background, a solution of high-speed data acquisition and storage system is introduced in this thesis, which is using of high-speed FPGA and embedded microprocessors as the central processing device for high-speed data transfer and data storage of redundant array of inexpensive disks , realized on-time data acquisition and mass storage. Key words: data acquisition; A/D convert; mass storage; RAID 现代工业生产和科学研究对数据采集的要求日益提高,在雷达、声纳、软件无线电、瞬态信号测量等一些高速、高精度的测量中,需要进行高速数据采集。目前,数据采集系统在高速A/D 、D/A 器件发展的带动下,采集带宽在稳步提高,具有100MSPS 采集能力以上的高速数据采集系统产品己较成熟。然而国外厂商的高速采集系统往往都价格不菲,而且由于高速数据采集对信号完整性、信号干扰、高速布线及数据处理和高速实时存储要求极高,国内完全掌握这个技术的厂商并不多,所以在实际应用中,很难找到一种满足需要的高速采集系统。这种情况长期限制了高速数据采集技术在我国工业生产和科学研究中的应用。 在这样的背景下,本文提出一种高速数据采集与实时存储系统的解决方案,解决以往在高速技术、数据存储与传输技术等方面的几个技术难点,采用FPGA 作为核心器件,集成中央逻辑控制及硬盘接口,直接将高速数据存入有多块硬 盘组成的实时RAID 存储系统中,实现了高速采集和实时存储,并可脱机运行。这种方案成本低廉,能提高采集速度,增加系统可靠性,并大大提高可持续采集时间,具有较大的灵活性。 1 总体系统方案硬件设计 高速数据采集系统的主要目的是把采集到的模拟信号转化为数字信号,所以模拟信号进入数据采集系统的第一步就是通过AD 采集电路进行模数转换;采集到的数据为了以后研究调用,就需要存储到存储器中,所以系统的最后一步是使用高速海量存储器对数据进行存储;系统的启动、停止和数据传输的方式还需要使用中央逻辑控制电路,所以在AD 采集电路与高速海量存储器之间增加中央逻辑控制电路来作为AD 采集电路与高速海量存储器之间的桥梁;系统通过人机接口与PC 机连接,可以对数据采集系统进行调试,还方便调用存储数据进行研究测试,并实现
星载激光雷达全球海洋测深研究
星载激光雷达全球海洋测深研究 海洋水色遥感是实现全球海洋水体光学参数和颗粒物空间观测的主要手段,自1978 年第一台水色传感器(CZCS) 成功运行至今,卫星水色遥感作为全球观测系统的一个重要组成部分,在海洋初级生产力、海洋碳循环和海洋生态环境等领域发挥了重要作用。目前业务化运行的星载水色传感器均采用被动光学遥感技术,利用海水组分对太阳光的吸收和散射特性,通过测量海面向上光谱辐射,获得海水固有光学参数IOPs以及叶绿素a浓度、颗粒有机碳POC浓度和颗粒无机碳PIC浓度、悬浮物SPM浓度生物地球化学参数。 激光雷达作为一种主动光学传感器,能够进一步提高空间全球海洋观测能力,已引起了海洋光学和水色遥感领域专家的极大兴趣。目前在轨运行的星载云-气溶胶激光雷达(CALIOP) 已显示出海洋探测的潜力。与被动水色传感器相比,星载海洋激光雷达具有获取垂直剖面数据和不受大气校正影响的优点,可以工作在白天和晚上,而且能覆盖太阳高度角较低的高纬度地区。由于光波在海水中传输时衰减速度很快,海水光学性质及激光波长会显著影响激光雷达的探测深度。 文中基于激光传输过程,根据激光雷达方程和给定的激光雷达参数,对星载海洋激光雷达探测全球海洋的最优波长
和最大探测深度进行了估算。 一、探测深度全球分布 利用表1所示的海洋激光雷达参数和MODIS年平均海洋光学参数数据,文中对星载激光雷达全球海洋探测深度进行了估算。发射激光参数的设定主要考虑了人眼安全阈值,并将不同波长的单脉冲能量设定为相同数值。考虑到大气透过率受气溶胶和云的影响较大,存在较大的不确定性,这并非文中讨论的重点,因此在计算过程中将单程大气透过率假设为0.8。背景光光谱辐亮度的数值在400~600nm的可见光范围内变化较小,因此计算过程中忽略了其随波长的变化。 表1中的背景光光谱辐亮度为太阳直射时的数值,计算时假定太阳直射赤道,并考虑背景光光谱辐亮度随纬度的变
大气探测激光雷达网络和星载激光雷达技术综述
大气探测激光雷达网络和星载激光雷达技术综述 摘要:大气探测激光雷达以精细的时空分辨率、髙探测精度和连续廓线数据获 取能力成为大气探测强有力的工具。通过激光雷达观测网络和星载激光雷达,可 以获得大空间尺度持续的四维大气信息,满足环境、气象和气候研究的需要。介 绍了目前存在的比较重要的激光雷达网络和航天强国的星载激光雷达计划。 关键词:大气激光雷达;网络化探测;星载探测;环境监测 引言 激光雷达具有精细的时间分辨率、优越的方向性和相干性、大的垂直探测跨度、高的探测精度和实时快速的数据获取能力,已经成为大气探测强有力的工具 可用来探测气瘠胶和云、温度、大气密度、水汽、臭氧、温室气体、风场、能见度、大气边界层等.激光雷达根据运载平台的不同,可分为地基式、车载式、船 载式、机载式、星载式激光雷达.单站的地基激光雷达、车载激光雷达、机载激 光雷达在观测范围方面都有一定的区域限制,难以进行全球范围的连续式观测。 但是在气候研究中,仅有局部的大气探测信息是远远不够的。为了适应全球气候 和环境变化对气象资料的空间分布和时间分布演变资料的迫切需求,在世界气象 组织、联合国环境署及区域性国际组织的倡导下,在全球范围内已经建立了一些 探测大气成分物理化学性质的四维分布的区域观测网络,现存比较重要的激光雷 达网包括:全球大气成分变化探测网、欧洲气溶胶研究激光雷达观测网、独联体 激光雷达网、亚洲沙尘激光雷达观测网、微脉冲激光雷达网、美国东部激光雷达 观测网等.而且,目前正在积极计划发展覆盖区域更广泛、观测内容更丰富、时 空分辨率更高的激光雷达观测网:全球大气气溶胶激光雷达观测网。 1激光雷达观测网 目前激光雷达观测网主要有:NDACC、EARLINET、AD-NET、REALM、MPLNET、CIS-LINET等。激光雷达观测网可以 获得大面积的空间覆盖,获得区域和全球范围大气廊线探测数据。不同观测网成 员之间相互合作,可以对同一过程或事件(如沙尘事件、火山爆发和深林火灾等)进行不同时间、不同地点的综合观测,发现新的现象和机理。 1.1NDACC NDACC建立于1991年,由美国国家海洋与气候局NOAA的气象服 务中心和美国国家环境预报中心等组织创建,主要用于观测和研究对流层上部、 平流层、中间层的物理化学状态的变化,并评估这种变化对对流层下部以及全球 气候的影响。在这个探测网中,目前全球分布70多个观测站点,其中有21个 激光雷达站点,NDACC中有30个地基激光雷达同时监测,其中有26个分 别放在21个激光雷达站点,另外4个在站点之间移动测量,用来验证和相互比较。主要的激光雷达技术包括瑞利散射测温技术、瑞利-拉曼散射测气溶胶和云 技术、差分吸收测臭氧技术,此外还有拉曼测水汽技术、拉曼测温技术、偏振- 拉曼测云和气溶胶技术等。 1.2EARLINET EARLINET仓丨J建于2000年,是第一个气溶胶激光雷达网,主 要目的是针对分布在欧洲大陆范围内的气溶胶提供一个全面的、定量的、具有统 计意义的数据库,监测和研究大气气溶胶的输送特征以及大气气溶胶对气候的影
高速数据采集技术发展综述
高速数据采集技术发展综述 摘要:高速数据采集系统广泛应用于军事、航天、航空、铁路、机械等诸多行业。区别于中速及低速数据采集系统,高速数据采集系统内部包含高速电路,电路系统1/3以上数字逻辑电路的时钟频率>=50MHz;对于并行采样系统,采样频率达到50MHz,并行8bit以上;对于串行采样系统,采样频率达到200MHz,目前广泛使用的高速数据采集系统采样频率一般在200KS/s~100MS/s,分辨率16bit~24bit。本篇文章主要简单介绍高速数据采集技术的发展,高速数据采集系统的结构、功能、原理、实现形式以及一些主要的应用。 关键词:高数数据采集系统、系统结构、系统原理、系统功能、实现形式、应用举例。 引言:高速数据采集技术在通信、航天、雷达等多个领域中广泛应用。随着软件无线电、通信技术、图像采集等技术的发展,对数据采集系统的要求越来越高,不仅要求较高的采集精度和采样速率,还要求采集设备便携化、网络化与智能化,并且需要将采集信息稳定的传输到计算机,进行显示与数据处理。同时,以太网协议已经成为当今局域网采用的最通用的通信协议标准。在嵌入式领域中,将以太网协议与数据采集系统相结合,形成局域网,实现方便可靠的数据传输与控制,是当前的研究热点。 1. 高速数据采集的发展 数据采集系统起始于20世纪50年代,由于数据采集测试系统具有高速性和~定的灵活性,可以满足众多传统方法不能完成的数据采集和测试任务,因而得到了初步的认可。到了70年代中后期,在数据采集系统发展过程中逐渐分为两类,一类是实验室数据采集系统,另一类是工业现场数据采集系统。就使用的总线而言,实验室数据采集系统多采用并行总线,工业现场数据采集系统多采用串行数据总线。随着微型机的发展,诞生了采集器、仪表等同计算机融为一体的数据采集系统。由于这种数据采集系统的性能优良,超过了传统的自动检测仪表和专用数据采集系统,因此获得了惊人的发展他3。随着计算机的普及应用,数据采集系统得到了极大的发展,基于标准总线并带有高速DSP的高速数据采集板卡产品也越来越多,技术先进、市场主流的厂商主要有Spectrum Signal Processing,SPEC,Signatec,Acquisition Logic,Blue Wave等公司 2001年Acquisition logic公司推出了基于PCI总线,采样率为500MS/s,1GS/s的8bit数据采集板卡AL500和AL51G,它的存储深度分别为64MB,256MB和1000MB三种。PCI 总线为主模式,数据宽度32bit,时钟频率33MHz,在突发模式下传输速率可达到133MB /s。两种板卡还同时具有数字信号处理功能:通过板卡上的现场可编程门阵列FPGA来实
三维激光扫描数据处理操作说明
三维激光扫描数据处理操作说明 中国地质大学三峡中心 钟成 2015年12月
1. 配置要求 扫描要求:密度高,扫描全面,站间重叠度高。 系统配置:XP系统,32位,有D盘盘符。 软件安装: ILIRS-3D软件包(绿色) polyworks_10_0_3_32bit.exe, chanzhuang.exe和配套库, Geomagic Studio10, TexCapture1.1。 Matlab 10.0 2. 数据预处理 2.1. 数据转换 2.1.1. 数据导入 打开ILIRS-3D软件包中Parser 5.0.1.4中Parser.exe,界面如图2.1.1: 图2.1.1 点击Add找到笔记本中存储扫描数据的文件夹:
出现以下界面: 图2.1.3 工具栏中放大缩小按钮可用于观察扫描范围。 2.1.2. 基本设置 然后点击setting对解压过程进行设置,出现如2.1.4界面。
图2.1.4 其中,Outputfile界面,主要设置输出路径和格式。默认路径在保存点云文件夹下,不用改。默认选择PIF格式,24-bit texture,也就是有颜色信息的点云,如果是8-bit scaled 则是点云强度信息。PIF格式是polyworks支持的格式。如果选择XYZ格式,则以ASCII码形式输出,也可以定义是否需要输出颜色信息。该格式可直接被Geomagic打开。 图2.1.5 2.1. 3. 颜色设置 然后,在最左边列表里选择Color Channel,出现如下界面:
选中, 默认的在会出现相应的照片信息,如果没有,则检查存储扫描数据的文件夹里是否有照片文件。 在里,默认是没有文件内容的,点击,到“ILIRS-3D”软件包,找到文件“10384 CameraCalParam.txt”即可。 2.1.4. 平移参数设置 然后在最左边列表里选择Pan tilt Transform,出现如下界面:
典型滤波器对星载高光谱分辨率激光雷达532 nm通道回波信号的影响
典型滤波器对星载高光谱分辨率激光雷达532nm 通道回波 信号的影响 余骁1,2,闵敏2,张兴赢2,孟晓阳2,邓小波1 (1.成都信息工程大学电子工程学院,四川成都610225; 2.中国气象局国家卫星气象中心,北京100081) 摘要:高光谱分辨率激光雷达(High Spectral Resolution Lidar ,HSRL)系统利用窄带滤波器将激光雷达回波信号中的大气粒子(云或气溶胶)散射和分子散射成分分开,提升了云或气溶胶光学特性的反演质量。提出了一种基于HSRL 探测原理的HSRL 回波信号模拟方法,其原理是利用CALIPSO 云/气溶胶消光系数产品和数值天气预报数据被用来仿真星载HSRL 532nm 回波信号。两种典型的窄带光谱滤波器:FPI(Fabry-P érot Interferometer)和碘吸收滤波器,作为分子通道滤波器的性能通过仿真的星载HSRL 回波信号进行分析。对三种典型:晴空、卷云、气溶胶(两层厚云)的HSRL 回波廓线进行详细的敏感分析表明碘分子吸收滤波器的性能明显优于FPI 滤波器,其中碘吸收滤波能保持可以忽略不计的相对偏差(<4.0×10-3%),这是由低光学厚度(<1.0)的粒子后向散射效应引起的。但是,如果FPI 滤波器的粒子后向散射透过率能保持在10-3水平以下,其仍不失为是一个好的选择。 关键词:星载高光谱分辨率激光雷达; 仿真;回波信号;光谱滤波器中图分类号:TN958.98文献标志码:A DOI :10.3788/IRLA201847.1230008 Effect of typical filters on return signals of spaceborne HRSL channel at 532nm Yu Xiao 1,2,Min Min 2,Zhang Xingying 2,Meng Xiaoyang 2,Deng Xiaobo 1 (1.College of Electronic Engineering,Chengdu University of Information Technology,Chengdu 610225,China; 2.National Satellite Meteorological Center,China Meteorological Administration,Beijing 100081,China) Abstract:The future high spectral resolution lidar (HSRL)system employs a narrow spectral filter to separate the particulate (cloud/aerosol)and molecular scattering components in the lidar return signals,which improves the quality of the retrieved cloud/aerosol optical properties.A simulation method of HSRL return signal based on HSRL detection principle was presented.The principle was that the CALIPSO cloud/aerosol extinction coefficient product and numerical weather forecast data were used to simulate the spaceborne HSRL 532nm return signal.The performance of two typical spectral filters,i.e.,Fabry -P érot interferometric (FPI)and iodine absorption filters,were analyzed using the simulated spaceborne HSRL return signals when they used as spaceborne HSRL molecular channel filter.The 收稿日期:2018-07-05;修订日期:2018-08-03 基金项目:国家重点研发计划(2017YFB0504001,2016YFB0500705);国家自然科学基金(41475032,41571348,41601400,41775028)作者简介:余骁(1992-),男,硕士生,主要从事星载激光雷达方面的研究。Email:274779518@https://www.360docs.net/doc/4b18297389.html, 导师简介:张兴赢(1978-),男,研究员,博士,主要从事卫星大气成分遥感及其应用方面的研究。Email:zxy@https://www.360docs.net/doc/4b18297389.html, 1230008-1第47卷第12期 红外与激光工程2018年12月Vol.47No.12Infrared and Laser Engineering Dec.2018 万方数据
利用激光雷达点云生成城市级三维道路地图
Computer Science and Application 计算机科学与应用, 2019, 9(6), 1169-1182 Published Online June 2019 in Hans. https://www.360docs.net/doc/4b18297389.html,/journal/csa https://https://www.360docs.net/doc/4b18297389.html,/10.12677/csa.2019.96132 Combine Laser Scan Data with Open Street Map to Produce a Three-Dimensional Road Map Chenjing Ding, Xingqun Zhao School of Biological and Medical Engineering, Southeast University, Nanjing Jiangsu Received: Jun. 7th, 2019; accepted: Jun. 21st, 2019; published: Jun. 28th, 2019 Abstract With the continuous development of computer technology, the method to acquire spatial data has updated rapidly. Three-dimensional digital map attracts so much attention to be developed. Gene-rating a three-dimensional digital map requires a basic map. Because the Open Street Map (OSM) is open-source and free, it has received widespread attention. However, the height information of the road is very sparse in the OSM, and the mean square error is higher than 5 meters, which makes more and more researchers focus on the generation of high-precision three-dimensional maps. Due to the Light Detection and Ranging (LiDAR) point cloud’s high-precision characteristics whose average square error is about 20 cm, it can extend the OSM to generate high-precision 3D maps. This paper studies the method of OSM combined with LiDAR point cloud to generate a three-dimensional digital map. Due to the sampling characteristics of the airborne LiDAR used in the overhead view, the oc-cluded area cannot be sampled. The method proposed in this paper can solve the challenge of occlu-sion. It is composed of 3 main parts: 1) dealing with indoor area; 2) handling with outdoor area; 3) applied Weighted Hough Transform (WHT) for recalculation. The main steps for dealing with indoor area are as follows: 1) The three-dimensional road surface is projected into a two-dimensional line by orthogonal projection. 2) To find a set of road candidate points, the line is fitted by Hough Transform (HT). 3) Random Sampling the Uniform Sample Consensus (RANSAC) combined with the least squares method (LSM) is used to fit the road plane according to the obtained set of candidate points. This pa-per proposes a method for estimating the height of an indoor road using the height of the associated outdoor channel which is added up with different weights according to their projection distance. For the road with abnormal slope, the Weighted Hough Transform (WHT) is used for recalculation. This paper uses the airborne lidar point cloud (root mean square error is about 20 cm) provided by the municipal government of Cologne, Germany, to establish a three-dimensional road map for the city of Aachen. The results show that compared with the Ordering Points to Identify The Clustering Structure (OPTICS) algorithm, PHT successfully predicts 87% of the scenarios, which is greater than the 13% success rate of the OPTICS algorithm. In conclusion, the accuracy of the PHT algorithm is higher. In addition, PHT is more robust to the occlusion problem, change of point cloud density and the interfe-rence of noise points. Keywords 3D Reconstruction, Lidar, Hough Transform, 3D Map