垂直轴磁悬浮风电系统双环自适应悬浮控制
哈工大_控制系统实践_磁悬浮小球
研究生自动控制专业实验 地点:A区主楼518房间 姓名:实验日期:年月日斑号:学号:机组编号: 同组人:成绩:教师签字:磁悬浮小球系统 实验报告 主编:钱玉恒,杨亚非 哈工大航天学院控制科学实验室
磁悬浮小球控制系统实验报告 一、实验内容 1、熟悉磁悬浮球控制系统的结构和原理; 2、了解磁悬浮物理模型建模与控制器设计; 3、掌握根轨迹控制实验设计与仿真; 4、掌握频率响应控制实验与仿真; 5、掌握PID控制器设计实验与仿真; 6、实验PID控制器的实物系统调试; 二、实验设备 1、磁悬浮球控制系统一套 磁悬浮球控制系统包括磁悬浮小球控制器、磁悬浮小球实验装置等组成。在控制器的前部设有操作面板,操作面板上有起动/停止开关,控制器的后部有电源开关。 2、磁悬浮球控制系统计算机部分 磁悬浮球控制系统计算机部分主要有计算机、1711控制卡等; 三、实验步骤 1、系统实验的线路连接 磁悬浮小球控制器与计算机、磁悬浮小球实验装置全部采用标准线连接,电源部分有标准电源线,考虑实验设备的使用便利,在试验前,实验装置的线路已经连接完毕。 2、启动实验装置 通电之前,请详细检察电源等连线是否正确,确认无误后,可接通控制器电源,随后起动计算机和控制器,在编程和仿真情况下,不要启动控制器。 3、系统实验的参数调试 根据仿真的数据及控制规则进行参数调试(根轨迹、频率、PID等),直到获得较理想参数为止。 四、实验要求
1、学生上机前要求 学生在实际上机调试之前,必须用自己的计算机,对系统的仿真全部做完,并且经过老师的检查许可后,才能申请上机调试。 学生必须交实验报告后才能上机调试。 2、学生上机要求 上机的同学要按照要求进行实验,不得有违反操作规程的现象,严格遵守实验室的有关规定。 五、系统建模思考题 1、系统模型线性化处理是否合理,写出推理过程? 答:磁悬浮系统的模型可描述如下 ()()()()()2221d x t m F i,x mg dt i F i,x K x di U t Ri t L dt ?=+??????=? ?????=+??? (1) 又有系统平衡的边界条件如下 ()0F i,x mg += (2) 由级数理论,将非线性函数展开为泰勒级数,在平衡点()00,i x 对系统进行线性化处理。对(1)式作泰勒级数展开并省略高阶项可得 0000(,)(,)(-)(-)i x F i x F i x K i i K x x =++ (3) 又由(2)式可知,对2i F(i,x )K()x =求偏导数得 2000000320022x x i i Ki Ki K F (i ,x )K F(i ,x )x x ==-==, (4) 则由(1)式可得 22000022300 22(-)(-)i x Ki Ki d x m K i i K x x i x dt x x =+=- (5) 对(5)进行拉普拉斯变换并带入编辑方程可得系统的开环传递函数 2001x(s )-i(s )a s -b = (6) 定义系统对象的输入量为功率放大器的输入电压也即控制电压in U ,系
数字电风扇模拟控制系统设计
泉州师范学院 毕业论文(设计)题目数字电风扇模拟控制系统设计 物信学院电子信息科学与技术专业07 级电信班学生姓名卢晗辉学号070303003 指导教师袁放成职称教授 完成日期2011年4月 教务处制
数字电风扇模拟控制系统设计 物信学院电子信息科学与技术专业070303003 卢晗辉 指导老师袁放成教授 【摘要】该数字电风扇模拟控制系统以单片机STC89C52为主控制核心控制风扇功能,通过单片机控制L298N 芯片驱动风扇实现三个档位的转速,温度传感器DS18B20实现温度的采集,并且具有定时功能,液晶LCD1602实现了显示风扇的工作状态、温度、动态倒计时显示剩余的定时时间。文章主要介绍了该数字电风扇模拟控制系统的硬件电路设计和软件设计。 【关键词】数字电风扇模拟系统;单片机STC89C52;风扇功能;LCD显示;
目录 引言........................................................ 错误!未定义书签。 1. 设计指标要求............................................. 错误!未定义书签。2.系统设计................................................. 错误!未定义书签。 2.1直流电机风扇.........................................................4 2.2双全桥功率放大芯片L298N (5) 2.2.1双全桥功率放大芯片L298N介绍 (5) 2.2.2双全桥功率放大芯片L298N工作原理 (5) 2.2.3光电耦合器TLP521芯片介绍...................... 错误!未定义书签。 2.3数字温度计DS18B20 (7) 2.4单片机STC89C52主控制模块......................................................10 2.5LCD显示模块....................................................................12 2.6键盘模块.......................................................................12 2.7直流稳压电源...................................................................12 3. 软件程序设计 (13) 3.1软件设计流程图..................................................................13 3.2占空比.........................................................................13 4. 硬件电路的焊接与调试 (15) 4.1 焊接注意的实现 (15) 4.2 硬件电路的调试 (15) 5. 软件的调试及问题分析 (15) 6设计总结与感受.......................................................................15 7致谢.................................................................................16 参考文献: (17) 附录PCB图...........................................................................19
直流双环系统的设计及仿真分析——运动控制系统课程设计
课程设计 题目直流双环系统(二)的设计及仿真 分析(四) 学院自动化学院 专业自动化专业 班级 姓名 指导教师 2013 年12 月30 日
课程设计任务书 学生姓名: 专业班级: 指导教师: 工作单位: 自动化学院 题 目: 直流双环系统(二)的设计及仿真分析(四) 初始条件: 有一转速、电流双闭环控制的H 形双极式PWM 直流调速系统,电动机参数为: 200,48, 3.7,200/min N N N N P W U V I A n r ====,电枢电阻 6.5a R =Ω,电枢回路总电阻8R =Ω,允 许电流过载倍数2λ=,电势系数0.12min/e C V r =?,电磁时间常数0.015l T s =,机电时间常数0.2m T s =,电流反馈滤波时间常数0.001oi T s =,转速反馈滤波时间常数 0.005on T s =,调节器输入输出电压**10nm im cm U U U V ===,调节器输入电阻040R k =Ω, 电力晶体管的开关频率1f kHz =,PWM 环节的放大倍数 4.8s K =。 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) 试对该系统进行动态参数设计。设计指标:稳态无静差,电流超调量5%i σ≤;空载起动到额定转速时的转速超调量20%n σ≤,过渡过程时间0.1s t s ≤。画出系统结构框图并计算: (1) 电流反馈系数β和转速反馈系数α; (2) 设计电流调节器,计算电阻和电容的数值(取040R k =Ω); (3) 设计转速调节器,计算电阻和电容的数值(取040R k =Ω); (4) 让电机带载(2dL I n ∝,风机泵类负载)启动到额定转速,观察并录下电机的转速、电流等的波形,并进行分析。
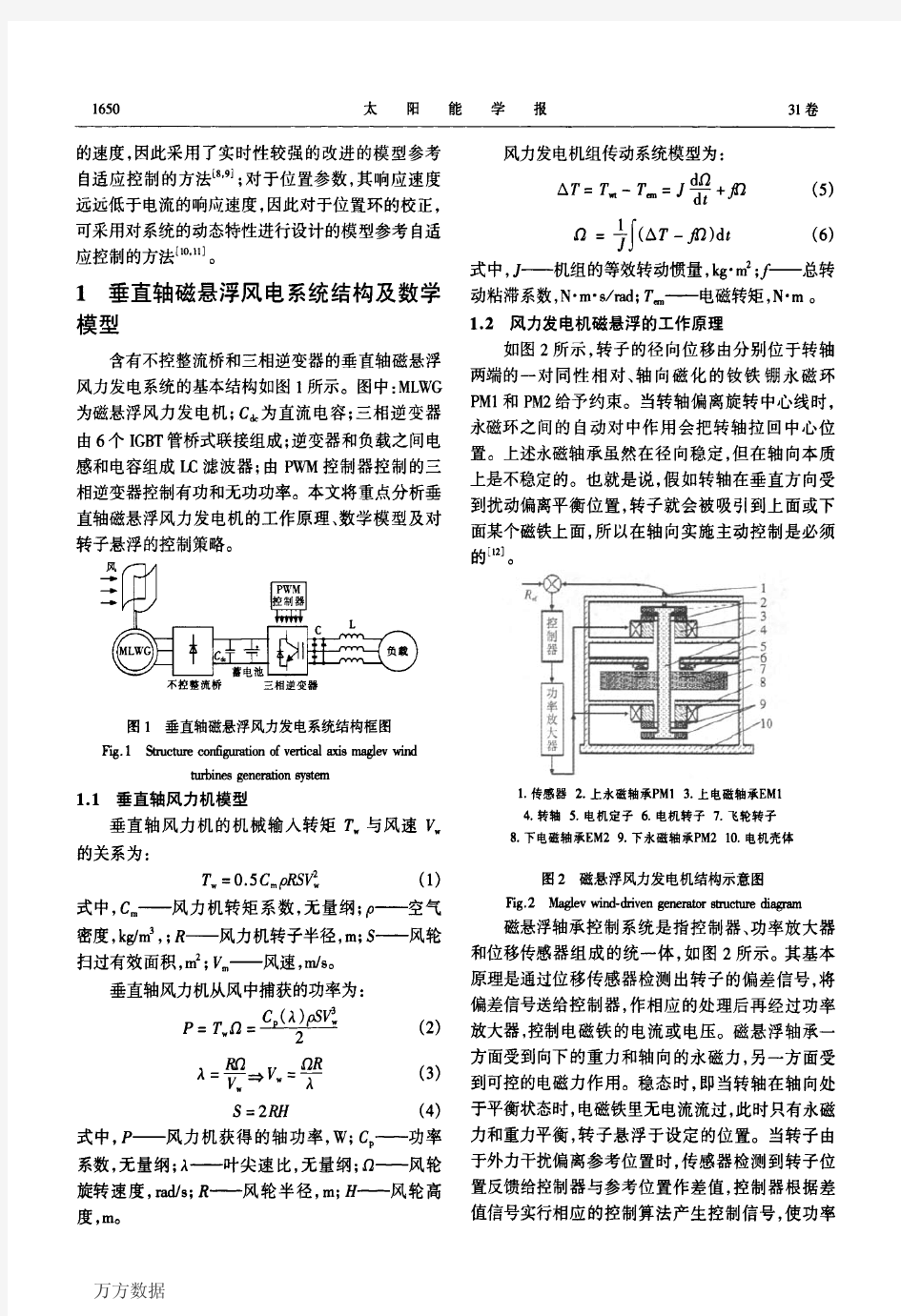
磁悬浮系统的PID控制
磁悬浮系统的PID控制
本科毕业设计(论文)题目: 磁悬浮系统的PID控制 姓名: 学号: 专业: 指导教师: 职称: 日期: 华科学院
摘要 磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。 本设计毕业设计在分析磁悬浮系统构成及工作原理的基础上,建立其数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真研究,得出较好的控制参数。最后,本文对以后研究工作的重点进行了思考,提出了自己的见解。 关键词:磁悬浮系统控制器MATLAB软件PID控制
Abstract Magnetic suspension technology, which has a series of advantages such as contact-free, no friction, no wear, no need of lubrication and long life expectancy, is widely concerned and adopted in high-tech areas such as energy, transportation, aerospace, industrial machinery and life science.On the basis of analyzing of magnetic suspension system’s structure and working principle, its system mathematical model was established, this thesis describe PID controller designed and get control scheme. It get the better control parmeters by MATLAB software simulation studies.The key research works for further study are proposed at last. Key Word:Magnetic Levitation Ball System Digital Controller MATLAB PID Control
电风扇模拟自然风控制电路的设计
郑州交通职业学院 毕业论文(设计) 论文(设计题目):电风扇模拟自然风控制电路的设计 所属系别信息工程系 专业班级 08大专电子信息工程技术1班 姓名 XX 学号 200808060830167 指导教师 XX 撰写日期 2011 年 5 月
摘要 本课题主要研究电风扇实现模拟自然风的功能,针对市场中家用电扇的功能分析,得出模拟自然风风扇将成为市场一种主流风扇,慢慢的将代替那些老式的风扇。本设计采用了一个以555多谐振荡器为核心的电路,由电源稳压电路、光波发生电路和光耦合成器电路组成。通过方波发生电路输出高低电平来控制晶闸管的导通和截止以实现电风扇模拟自然风的效果;通过调节电位器调节输出方波的占空比,可以控制单位时间内送风的时间。该电路能够实现控制风扇扇叶由停止→慢慢转动→快速转动→慢速转动→停止周期性的转动,并且能够调节周期的时间。该电路利用555定时器输出相应的控制信号来控制电路,达到了调节风扇风速强弱、风扇运转状态和开关的逻辑系统的目的,并且利用定时器设定时间控制继电器,使风扇的设计更加完善和人性化。 关键词:电风扇,模拟自然风,555多谐振荡器,继电器,可调占空比,双向晶闸管
Abstract This topic research electric fan simulating natural wind function, in view of the market in home fans that the function analysis, analog natural fan will become market a mainstream fan, slowly will take the place of the old fan. The design has adopted a more harmonic oscillator 555 circuits for core, the power supply voltage circuit, the light wave generator of light coupling to become useful circuit. Through the square wave generating circuit output discretion level to control thyristor conduction and globe in order to achieve the effect of fan imitating natural wind; By adjusting the potentiometer adjustment output pulse 390v, can control unit time supply of time. This circuit can realize control fan fan leaves turning slowly and by stop - and quickly turned slowly rotating - stop periodic rotating, and can adjust cycle time. This circuit using 555 timing of control signal output corresponding to control circuit, to adjust fan wind speed and the weak, fan operation status and switch logic system, and the purpose of using timer control relay time set the design, make the fan more perfect and humanization. Key words:electric fan, imitating natural wind, 555 much harmonic oscillator, relays, adjustable 390v, two-way thyristor
基于准PR双环控制的单相逆变器的设计与研究
基于准PR双环控制的单相逆变器的设计与研究 发表时间:2019-05-13T16:06:17.847Z 来源:《知识-力量》2019年8月26期作者:王思正 [导读] 本文对单相全桥SPWM逆变器进行了系统的建模与分析,结合运动控制系统的设计思路,引入了电压外环PR控制、电流内环PI控制的双闭环的控制策略,利用极点配置法设计出了所引入的控制器的参数。在MATLAB中对整个系统进行simulink仿真。 (中南大学,湖南长沙 410000) 摘要:本文对单相全桥SPWM逆变器进行了系统的建模与分析,结合运动控制系统的设计思路,引入了电压外环PR控制、电流内环PI控制的双闭环的控制策略,利用极点配置法设计出了所引入的控制器的参数。在MATLAB中对整个系统进行simulink仿真。仿真结果证明,基于准PR双环控制的单相逆变器,即使在有负载扰动的情况下,也能够在稳定的基础上具有良好的动态性能与稳态精度。 关键词:电力电子技术;逆变器;PR控制;极点配置;双闭环 引言 随着数字电路控制技术的不断发展,其开关频率可以设置的很大,使得SPWM逆变器的输出电压的谐波分量高频化,进而我们可以使用体积很小的滤波器就可以获得失真度很小的正弦波。但受到死区效应、A/D转换和非线性负载等因素的影响,会使得逆变系统的输出电压发生畸变。事实上,无论是电网,还是在我们的生活中,大部分的负载都是非线性负载,所以我们必须引入适当的控制器,来减弱或者消除这种影响。 针对传统电压电流双闭环控制方案存在的问题,结合所学知识,考虑到自动控制理论的基本原理——内模原理,本文外环采用准PR控制,提高系统的稳态精度,内环采用经典的PI控制,用以改善系统的动态性能。 1逆变器的数学模型分析 单相全桥逆变器在中大功率场合得到广泛应用因此本文主要对单相全桥逆变器进行研究。常见的单相全桥逆变器的拓扑,主要有直流侧、逆变桥及输出L-C滤波器组成。 1.1逆变桥的建模 1.2 LC滤波结构建模 为便于对逆变器的结构进行分析仅考虑负载端LC滤波低通部分,由滤波器的结构可以得到如下动态空间表达式: 。对于逆变器的LC滤波部分,将输出电压Uin作为输入量,将电容两端的电压Uo作为输出量,电感电流iL作为电流内反馈信号,输出电压Uo作为电压外反馈信号,建立单相逆变器输出滤波部分的电路等效框图如图1所示: 图1:单相逆变器LC滤波结构框图 2逆变器的双闭环控制 2.1逆变器的双闭环控制分析 LC滤波系统的闭环传函:。可知,r很小,系统的阻尼比很小,极易产生震荡,因此必须采用闭环控制提高系统的阻尼比,改善系统的的性能。通常采用双闭环控制,双闭环控制能够在保持系统稳定的基础上极大地改善系统的动态性能和稳态精度。 传统的双闭环控制,内环调节器采用比例控制,外环调节器采用PI控制,这样虽然也能起到改善系统性能的目的,但PI控制并不能无差的跟踪正弦信号,因此本文电压外环采用准PR(比例谐振)控制,它可以无差的跟踪正弦信号,进一步提升系统的稳态精度。内环采用
电风扇模拟自然风控制器(一)
电风扇模拟自然风控制器(一)
————————————————————————————————作者:————————————————————————————————日期:
电风扇模拟自然风控制器(一) 本文介绍的这种电子装置可与普通电风扇配套使用,将电风扇插入到该装置的插座中,即可使电风扇扇出的风量时大时小,时有时无,与自然风近似,使人感到舒适、凉爽。同时亦有降低电风扇能耗的作用,爱好者不妨一试。 工作原理 该装置电路工作原理如下图所示。它是由电源电路和自激振荡器、无触点开关等组成。电容器C1、电阻R1、稳压二极管DW及二极管VDl、电容器C2组成该装置的简易降压整流、稳压和滤波电路,目的是将220V市电变换成约12V的平滑直流电,作为自激多谐振荡器的电源。由时基集成电路NE555、电位器RP、电容器C3以及二极管VD2、VD3构成了占空比可调式振荡器,其输出为方波脉冲。从IC的⑧脚上输出的方波信号经发光二极管LED后加到双向可控硅元件VS的控制极。当IC③脚有方波信号输出时,LED点亮,同时VS触发导通,插在其插座CZ中的电风扇通流运转;当IC
③脚没有方波信号输出时,LED截止,VS关断,插在CZ中的电风扇无电流通过而停止工作。这样周期性的控制VS的导通与关断,从而控制了电风扇的转与停,反映在风量上为快一慢、强一弱,这样得到的阵风有如自然风一样。 元器件选择与调试 IC可采用时基集成电路NE555、μA555、LM555或5G1555等。C1的耐压一定要大于400V,容量为0.47μ~0.68μ。VS一般采用3A/600V的双向可控硅。DW采用稳压值为12V左右、0.5W的稳压二极管,如2CW60等。R3与C4构成VS过压缓冲网络,一般不宜省去,以防损坏VS或误动作。其它元器件可按图示数据选用,无特别要求。 电路装焊完毕,即可通电调试,先在CZ中插入60W的白炽台灯,调节RP使台灯的光亮发生闪烁,说明电路工作基本正常,其闪烁周期可按0.693(RP+R2)C3公式估算, 然后再插入台扇实调至满意 为止。也可以在电位器旋钮旁 刻上数字,从而可以方便地调 节自然风的急缓。调试完毕, 认为合格即可找一只塑料盒 装入,插座CZ可以另接。
电风扇设计报告
新疆工业高等专科学校 电气与信息工程系课程设计任务书 教研室主任(签名)系(部)主任(签名)年月日
目录 1 Proteus和Keil的使用 (5) 1.1 Proteus的使用 (5) 1.1.1软件打开 (5) 1.1.2工作界面 (5) 1.2 Keil C51 的使用 (6) 1.2.1软件的打开 (6) 1.2.2工作界面 (6) 1.2.3 电风扇实例程序设计 (7) 2.1设计方案特点 (11) 2.2关于AT89C51单片机的介绍 (11) 2.2.1主要特性: (12) 2.2.2管脚说明: (13) 2.2.3.振荡器特性: (14) 总结 (16) 结束语...................错误!未定义书签。参考文献.. (18) 附录 (18)
新疆工业高等专科学校电气与信息工程系 课程设计评定意见 设计题目:电风扇模拟控制系统设计 学生姓名:程浩专业电力系统自动化班级电力09-9(2)班评定意见: 评定成绩:
摘要 本次课程设计通过keilC软件和Proteus软件设计一个电风扇模拟控制系统设计。基于AT89C51芯片实现了用四位数码管实时显示电风扇的工作状态,最高位显示风类:“自然风”显示“1”、“常风”显示“2”、“睡眠风”显示“3”。后3位显示定时时间:动态倒计时显示剩余的定时时间,无定时显示“000”。设计一个“定时”键,用于定时时间长短设置;设置一个“摇头”键用于控制电机摇头。设计过热检测与保护电路,若风扇电机过热,则电机停止转动,电机冷却后电机又恢复转动。最终完成了设计任务。 关键词:AT89C51 keilC软件 Proteus软件
基于单片机的电风扇模拟自然风控制器设计
本科毕业设计(论文) 基于单片机的电风扇模拟自然风控制器设计 学院电子信息工程学院 专业电气工程及其自动化 年级班别13电气工程及其自动化 学号2013402040125 学生姓名胡长新 2017年3月21日
摘要 随着社会的不断发展,科技的不断进步,人们对于电风扇的选择也变得更苛刻了,面临着强大的竞争力,电风扇想要在市场上取得一席之地就必须变得更加人性化,更加智能化。因此,模拟自然风的电风扇就会越来越被重视,从而被广泛的应用。本文设计的是基于单片机的电风扇模拟自然风控制器,通过使用STC12C5A60S2单片机来输出PWM波,并由两个BTS7960芯片组成一个H桥驱动电路来驱动电风扇电机转动。该设计能够实现控制风扇的扇叶由停止→慢慢转动→快速转动→慢速转动→停止进行这种周期性的转动,而且能够对这个周期的时间进行调节。这样风扇就可以模拟成自然风了,给人们带来了更好的舒适感。 关键词:单片机;PWM波;H桥驱动电路;模拟自然风
Abstract With the continuous development of society, the progress of science and technology, people's choice for electric fan has become more severe, facing strong competition, the electric fan to make a space for one person in the market must become more humane, more intelligent. Therefore, the simulation of natural wind fans will be more and more attention, which is widely used. This paper is the design of MCU simulation natural wind controller for electric fan based on STC12C5A60S2 MCU by using PWM wave output, and by two BTS7970 chip is composed of a H bridge driving circuit to drive the electric fan motor rotation. The design of the utility model can realize the control of the fan blade from the stop to the slow rotation, the fast rotation, the slow rotation and the periodic rotation, and can adjust the time of the cycle. So that the fan can simulate the natural wind, to bring people a better sense of comfort. Key words: single chip;PWM wave;H bridge driver circuit;simulation of natural wind
磁悬浮系统建模及其PID控制器设计
《Matlab仿真技术》 设计报告 题目磁悬浮系统建模及其PID控制器设计 专业班级电气工程及其自动化 11**班 学号 201110710247 学生姓名 ** 指导教师 ** 学院名称电气信息工程学院 完成日期: 2014 年 5 月 7 日
磁悬浮系统建模及其PID控制器设计 Magnetic levitation system based on PID controller simulation 摘要 磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。 随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。本设计以PID 控制为原理,设计出PID控制器对磁悬浮系统进行控制。 在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。 PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。目前大多数工业控制器都是PID控制器或其改进型。尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。 关键字:磁悬浮系统;PID控制器;MATLAB仿真
一、磁悬浮技术简介 1.概述: 磁悬浮是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮的平衡状态,磁悬浮看起来简单,但是具体磁悬浮悬浮特性的实现却经历了一个漫长的岁月。由于磁悬浮技术原理是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化高新技术。伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进一步的研究,磁悬浮随之解开了其神秘一方面。 1900年初,美国,法国等专家曾提出物体摆脱自身重力阻力并高效运营的若干猜想--也就是磁悬浮的早期模型。并列出了无摩擦阻力的磁悬浮列车使用的可能性。然而,当时由于科学技术以及材料局限性磁悬浮列车只处于猜想阶段,未提出一个切实可行的办法来实现这一目标。 1842年,英国物理学家Earnshow就提出了磁悬浮的概念,同时指出:单靠永久磁铁是不能将一个铁磁体在所有六个自由度上都保持在自由稳定的悬浮状态。 1934年,德国的赫尔曼·肯佩尔申请了磁悬浮列车这一的专利。 在20世纪70、80年代,磁悬浮列车系统继续在德国蒂森亨舍尔测试和实施运行。德国开始命名这套磁悬浮系统为“磁悬浮”。 1966年,美国科学家詹姆斯·鲍威尔和戈登·丹比提出了第一个具有实用性质的磁悬浮运输系统。 1970年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始筹划进行磁悬浮运输系统的开发。 2009年时,国内外研究的热点是磁悬浮轴承和磁悬浮列车,而应用最广泛的是磁悬浮轴承。它的无接触、无摩擦、使用寿命长、不用润滑以及高精度等特殊的优点引起世界各国科学界的特别关注,国内外学者和企业界人士都对其倾注了极大的兴趣和研究热情。 2. 磁悬浮技术的应用及展望 20世纪60年代,世界上出现了3个载人的气垫车试验系统,它是最早对磁悬浮列车进行研究的系统。随着技术的发展,特别是固体电子学的出现,使原来十分庞大的控制设备变得十分轻巧,这就给磁悬浮列车技术提供了实现的可能。1969年,德国牵引机车公司的马法伊研制出小型磁悬浮列车模型,以后命名为TR01型,该车在1km 轨道上的时速达165km,这是磁悬浮列车发展的第一个里程碑。在制造磁悬浮列车的
电风扇模拟控制系统
福建电力职业技术学院 课程设计课程名称:智能仪器 题目:电风扇模拟控制系统设计 专业班次:11(三)建筑电气1 姓名:林毅宾 学号:201128013116 指导教师:张继伟 学期:2012-2013学年第一学期 日期:2014.4
目录 引言 ........................................................................................................................................ I 第一章设计任务 . (1) 1.1 课题内容 (1) 1.2 课题任务 (1) 第二章系统设计方案 (2) 2.1 设计方案特点 (2) 2.1.1 系统的工作原理 (2) 2.1.2 系统的组成 (2) 2.1.3 系统设计框图 (2) 第三章系统硬件设计与软件设计 (3) 3.1 系统硬件设计电路图 (3) 3.1.1 系统复位电路和时钟电路 (4) 3.1.2 AT89C51单片机电源电路 (4) 3.1.3 稳压芯片7805 (4) 3.1.4 集成块74LS245功能 (4) 3.1.5 集成块74LS06功能 (4) 3.1.6 LED显示电路 (4) 3.1.7 直流电机原理 (14) 3.2 系统软件设计 (14) 3.2.1 占空比技术 (14) 3.2.2 程序框图 (14) 3.2.3 电风扇系统控制程序 (6) 3.2.4 系统程序清单 (7) 第四章总结 (8) 参考文献 (9)
引言 电风扇简称电扇,香港称为风扇,日本及韩国称为扇风机,是一种利用电动机驱动扇叶旋转,来达到使空气加速流通的家用电器,主要用于清凉解暑和流通空气。广泛用于家庭、办公室、商店、医院和宾馆等场所。1882年,美国纽约的克罗卡日卡齐斯发动机厂的主任技师休伊?斯卡茨?霍伊拉,最早发明了商品化的电风扇。 如今的电风扇已一改人们印象中的传统形象,在外观和功能上都更追求个性化,而电脑控制、自然风、睡眠风、负离子功能等这些本属于空调器的功能,也被众多的电风扇厂家采用,并增加了照明、驱蚊等更多的实用功能。这些外观不拘一格并且功能多样的产品,预示了整个电风扇行业的发展趋势。其主要原因:一是风扇和空调的降温效果不同——空调有强大的制冷功能,可以快速有效地降低环境温度,但电风扇的风更温和,更加适合老人儿童和体质较弱的人使用;二是电风扇有价格优势,价格低廉而且相对省电,安装和使用都非常简单。 本课程设计的目的: 1、培养针对课题需要,选择和查阅有关手册、图表及文献资料的自学能力,提高组成系统、编程、调试的动手能力; 2、通过对课题设计方案的分析、选择、比较、熟悉单片机用系统开发、研制的过程,软硬件设计的方法、内容及步骤; 3、巩固、加深和扩大单片机应用的知识面,提高综合及灵活运用所学知识解决工业控制的能力。
matlab自然风仿真
工程应用综合设计 报告 学院:电气工程学院 班级: 学号: 姓名: 课题名称:自然风与风力机的仿真 指导老师:
摘要 本篇论文主要报告了国内外目前的风力发电的现状,介绍了风力发电机组的基本结构和目前主要的风力机种类,还论述了控制风力机功率的基本要素。本设计还着重对自然风进行了模拟仿真,这对研究风力机的仿真特性具有重要意义。通过研究风力机各个参数的物理意义及之间的关系,推导出风力机输出功率与风速,叶尖速比,发电机转速及桨距角之间的关系,在定桨距风力发电机组控制系统仿真方面作了初步的探究和研究。通过MATLAB仿真软件,建立自然风的风速模型和风力机的的仿真模型。验证风力发电系统控制模型的可用性,并且通过单曲线绘图对模拟结果进行分析,产生可直接用于研究报告的模拟结果图形,在定桨距风力发电机组控制系统仿真方面,作出了初步的研究和探索。 关键词:风力机;自然风;建模;仿真
目录 摘要............................................................. I 第一章绪论.. (3) 1.1研究风力机发电系统的重要意义 (3) 1.2国内外研究进展 (3) 第二章风力发电原理 (5) 2.1风力发电系统组成及原理 (5) 2.2风力发电机简介 (5) 2.3风力机分类及对比 (6) 第三章风力机的功率控制原理 (8) 3.1风能 (8) 3.2风能利用系数Cp (8) 3.3叶尖速比λ (9) 3.4桨距角β (9) 3.5贝兹理论 (9) 4.1基本风的模拟 (10) 4.2阵风的模拟 (10) 4.3渐变风的模拟 (11) 4.4随机噪声风的模拟 (12) 4.5自然风的模拟 (12) 第五章定桨距风力机的建模与仿真分析 (13) 5.1定桨距风力机仿真模型的搭建 (13) 5.2 matlab仿真结果分析 (17) 第六章总结 (21) 参考文献 (22)
电风扇模拟控制系统
单片机技术课程设计 题目风扇模拟控制系统 院系轨道交通学院 专业铁道信号年级 2013级 学生姓名张三李四王五 学号 指导教师罗世民
需求书 题目十一:电风扇模拟控制系统设计★★ 1.用4个LED显示电风扇的工作状态(1,2,3,4四档风力),显示风类:“自然风”、“常风”和“睡眠风”。(20分) 2.设计“自然风”、“常风”和“睡眠风”三个风类键用于设置风类; 设计一个“摇头”键用于控制电机摇头。(20分) 3.设计一个“定时”键,用于定时时间长短设置;(20分) 4*.设计过热检测与保护电路,若电风扇电机过热,则电机停止转动,蜂鸣器报警,电机冷却后电机又恢复转动。 5*. 用LCD作为用户界面显示风扇运行模式等信息。 6@.其他功能(创新部分 10分)
电风扇模拟控制系统设计 通信工程专业 学生张三李四王五指导教师简磊 【摘要】本设计以直流电机控制为基础,基于传感器技术,以单片机控制技术为核心,实现电风扇的智能控制,同时设计采用轻触开关即可具有电风扇的调档功能。使用集成电路LM298N完成电风扇的驱动设计,通过单片机STC89C52的定时器0以及定时器1产生不同占空比的PWM波形控制电风扇电机驱动芯片从而改变电风扇电机的输入电流,最终实现电风扇电机转速调节功能,使得设计更加人性化,更加环保节能。 【关键词】调速功能单片机测温智能控制
目录 任务书 (1) 摘要 (Ⅰ) 目录 (Ⅱ) 引言 (Ⅲ) 一、方案设计 (Ⅳ) 二、硬件电路 (Ⅳ) 2.1电路系统框图 (Ⅳ) 2.2 STC89C52RC最小系统 (Ⅴ) 2.3 按键模块 (Ⅴ) 2.4 LED指示灯模块 (Ⅵ) 2.5电机温度实时测量模块 (Ⅵ) 2.6电机驱动模块 (Ⅵ) 2.7 LCD显示模块 (Ⅶ) 三、软件程序 (Ⅷ) 3.1主函数程序流程图 (Ⅷ) 3.2按键模块接口程序 (Ⅸ) 3.3 LED指示灯接口程序 (Ⅸ) 3.4 电机测温接口程序 (Ⅸ) 3.5 电机驱动接口程序 (Ⅸ) 3.6 LCD显示驱动程序 (Ⅸ) 四、调试结果 (Ⅹ) 五、小结 (Ⅺ) 附录一总电路仿真 (ⅩⅢ) 附录二程序清单 (ⅩⅣ) 附录三元件清单 (ⅩⅤ)
磁悬浮球控制系统的仿真研究
磁悬浮球控制系统的仿真研究 王玲玲,王宏,梁勇 (海军航空工程学院,山东烟台 264000) 作者简介:王玲玲(1984—),女,硕士,讲师,主要从事控制技术研究。 本文引用格式:王玲玲,王宏,梁勇.磁悬浮球控制系统的仿真研究[J].兵器装备工程学报,2017(4):122-126. Citation:format:WANG Ling-ling, WANG Hong, LIANG Yong.Simulation and Research of Magnetic Levitation Ball Control System[J].Journal of Ordnance Equipment Engineering,2017(4):122-126. 摘要:针对磁悬浮球系统的本质不稳定性,设计PID控制算法实现系统的稳定控制。建立磁悬浮球系统的动力学模型,并对其中的非线性部分进行平衡点处的线性化,采用根轨迹校正设计超前滞后控制器。最后采用PID控制设计,并使用根轨迹校正中零极点对系统性能影响的思想去调整PID参数,使系统的稳定性、动态性能和稳态性能满足要求。 关键词:磁悬浮球系统;PID;根轨迹法;校正 磁悬浮可以用于实现各种机械结构的高速、无摩擦运转,如高速磁悬浮列车、高速磁悬浮电机、磁悬浮轴承等。尽管磁悬浮的应用领域繁多,系统形式和结构各不相同,但究其本质都具有本质非线性、不确定性、开环不确定性等特征。这些特征增加了对其控制的难度,也正是由于磁悬浮的这些特性,使其更加具有研究价值和意义。本文针对磁悬浮球系统,研究其稳定控制,并使其性能指标满足要求。 1 磁悬浮球控制系统的基本原理 磁悬浮球控制系统主要由铁芯、线圈、光电源、位置传感器、放大及补偿装置、数字控制器和控制对象钢球等部件组成[1],如图1所示。 当电磁铁上的线圈绕组通电时,位于磁场中的刚体受到电磁力的吸引作用。当产生的电磁力与球体的重力相等时,球体悬浮于空中,处于不稳定的平衡状态,当它受到外界扰动时,易失去平衡。因此,为了使系统稳定,就必须加上反馈环节,实现闭环控制,并设计控制算法,使稳定后的性能满足要求。
模拟自然风控制器的制作
内蒙古师范大学计算机与信息工程学院《电子工艺实训》课程设计报告
实用模拟自然风控制器的制作 计算机与信息工程学院 2013级计科班娄心玲 20131104765 指导老师张鹏举张悦宁老师 摘要本文通过介绍时基电路NE555和晶闸管的特性及应用,以及NE555和晶闸管构成的模拟自然风控制器工作原理,通过本次实训课程进一步熟悉电子电路的装配、调试、检验方法。关键词时基电路NE555;双向晶闸管;模拟自然风控制器 1.设计任务及主要技术指标和要求 1.1设计任务 1) 了解时基电路NE555和双向晶闸管的特性及应用 2) 掌握NE555和顺双向晶闸管构成的模拟自然风控制器工作原理 3) 通过本次实训课,进一步熟悉电子电路的装配、调试、检验方法 4)焊铁的正确使用,吸锡器的正确使用,剥线钳的正确使用 1.2 主要技术指标和要求 要求输出周期性波形;接通电源,代替电风扇接入电路的小灯泡缓缓变亮,然后亮度持续一段时间,缓缓变暗,一段时间后,暗掉的小灯泡再次变亮,周期性的循环上述过程,调节滑动变阻器RP,可改变明暗之间的时间长度。 2.电路组成及工作原理
模拟自然风控制器工作原理图(2-1) 2.1 电路组成 1)降压电路:通过R1与C1并联实际上是通过容抗限流,而电容器实际上起到了限制电流和动态分配电容器和负载的角色。 2)双向晶闸管: 双向晶闸管是由N-P-N-P-N五层半导体材料制成的,对外也引出三个电极,其结构如图所示。双向晶闸管相当于两个单向晶闸管的反向并联,但只有一个控制极。双向晶闸管与单向晶闸管一样,也具有触发控制特性。不过,它的触发控制特性与单向晶闸管有很大的不同,这就是无论在阳极和阴极间接人何种极性的电压,只要在它的控制极上加上一个触发脉冲,也不管这个脉冲是什么极性的,都可以便双向晶闸管导通。由于双向晶闸管在阳、阴极间接任何极性的工作电压都可以实现触发控制,因此双向晶闸管的主电极也就没有阳极、阴极之分,通常把这两个主电极称为T1电极和T2电极,将接在P型半导体材料上的主电极称为T1电极,将接在N型半导体材料上的电极称为T2电极。由于双向晶闸管的两个主电极没有正负之分,所以它的参数中也就没有正向峰值电压与反同峰值电压之分,而只用一个最大峰值电压,双向晶闸管的其他参数则和单向晶闸管相同。 双向晶闸管的结构及电路如图(1)所示 双向晶闸管的伏安特性曲线具有对称性,如图(2)所示。
磁悬浮系统建模及其PID控制器设计
《Matlab仿真技术》 设计报告 题目磁悬浮系统建模及其PID控制器设计专业班级电气工程及其自动化11**班 学号 2 学生姓名 ** 指导教师** 学院名称电气信息工程学院 完成日期: 2014年 5 月 7 日
磁悬浮系统建模及其PID控制器设计Magnetic levitation system base don PID controller simulation 摘要 磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业与生命科学等高科技领域有着广泛得应用背景。 随着磁悬浮技术得广泛应用,对磁悬浮系统得控制已成为首要问题。本设计以PID 控制为原理,设计出PID控制器对磁悬浮系统进行控制。 在分析磁悬浮系统构成及工作原理得基础上,建立磁悬浮控制系统得数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好得控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。最后,本设计对以后研究工作得重点进行了思考,提出了自己得见解。 PID控制器自产生以来,一直就是工业生产过程中应用最广、也就是最成熟得控制器。目前大多数工业控制器都就是PID控制器或其改进型。尽管在控制领域,各种新型控制器不断涌现,但PID控制器还就是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。 关键字:磁悬浮系统;PID控制器;MATLAB仿真 一、磁悬浮技术简介 1、概述: 磁悬浮就是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮得平衡状态,磁悬浮瞧起来简单,但就是具体磁悬浮悬浮特性得实现却经历了一个漫长得岁月。由于磁悬浮技术原理就是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体得典型得机电一体化高新技术。伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料得发展与转子动力学得进一步得研究,磁悬浮随之解开了其神秘一方面。 1900年初,美国,法国等专家曾提出物体摆脱自身重力阻力并高效运营得若干猜想--也就就是磁悬浮得早期模型。并列出了无摩擦阻力得磁悬浮列车使用得可能性。然而,当时由于科学技术以及材料局限性磁悬浮列车只处于猜想阶段,未提出一个切实可行得办法来实现这一目标。 1842年,英国物理学家Earnshow就提出了磁悬浮得概念,同时指出:单靠永久磁铁就是不能将一个铁磁体在所有六个自由度上都保持在自由稳定得悬浮状态。