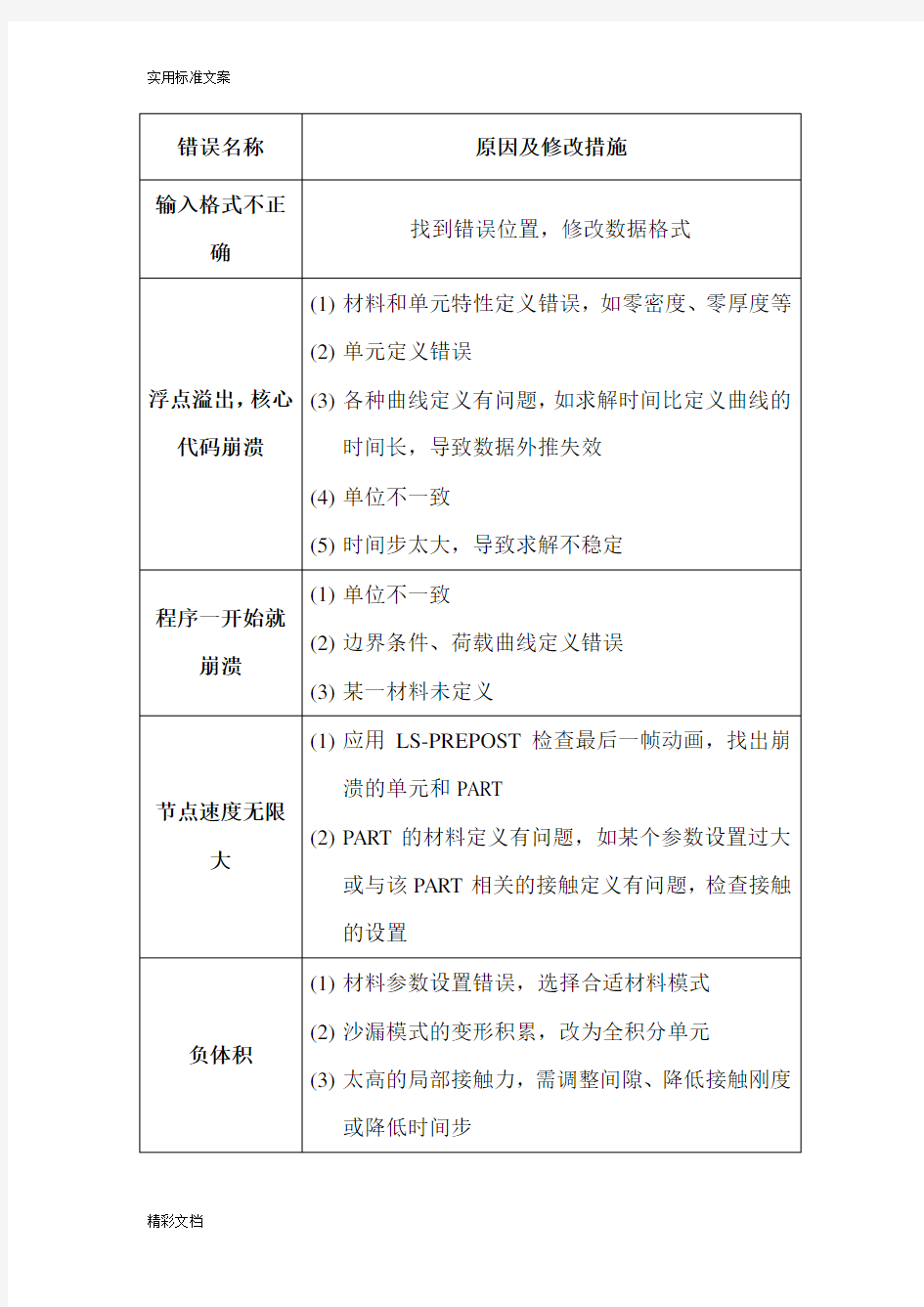
LS-DYNA求解过程中常见错误和警告信息的负体积、节点速度无限大等
实用标准文案
精彩文档 错误名称
原因及修改措施
输入格式不正确
找到错误位置,修改数据格式
浮点溢出,核心代码崩溃 (1) 材料和单元特性定义错误,如零密度、零厚度等
(2) 单元定义错误
(3) 各种曲线定义有问题,如求解时间比定义曲线的
时间长,导致数据外推失效
(4) 单位不一致
(5) 时间步太大,导致求解不稳定
程序一开始就
崩溃
(1) 单位不一致
(2) 边界条件、荷载曲线定义错误
(3) 某一材料未定义
节点速度无限
大
(1) 应用LS-PREPOST 检查最后一帧动画,找出崩
溃的单元和PART
(2) PART 的材料定义有问题,如某个参数设置过大
或与该PART 相关的接触定义有问题,检查接触
的设置
负体积
(1) 材料参数设置错误,选择合适材料模式
(2) 沙漏模式的变形积累,改为全积分单元
(3) 太高的局部接触力,需调整间隙、降低接触刚度
或降低时间步
完全弹性碰撞后的速度公式
如何巧记弹性碰撞后的速度公式 一、“一动碰一静”的弹性碰撞公式 问题:如图1所示,在光滑水平面上,质量为m1的小球,以速度v1与原来静止的质量为m2的小球发生对心弹性碰撞,试求碰撞后它们各自的速度? 图1 设碰撞后它们的速度分别为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能(动能)守恒定律得: m1v1=m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 联立①⑤解得 ⑥ ⑦ 上面⑥⑦式的右边只有分子不同,但记忆起来容易混。为此可做如下分析:当两球碰撞至球心相距最近时,两球达到瞬时的共同速度v共,由动量守恒定律得: m1v1= (m1+m2) v共 解出v共=m1v1 /(m1+m2)。而两球从球心相距最近到分开过程中,球m2继续受到向前 的弹力作用,因此速度会更大,根据对称可猜想其速度恰好增大一倍即,而这恰好是⑦式,因此⑦式就可上述推理轻松记住,⑥式也就不难写出了。如果⑥式的分子容易写成m2-m1,则可根据质量m1的乒乓球以速度v1去碰原来静止的铅球m2,碰撞后乒乓球被反弹回,因此v1'应当是负的(v1'<0),故分子写成m1-m2才行。在“验证动量守恒定律”的实验中,要求入射球的质量m1大于被碰球的质量m2,也可由⑥式 解释。因为只有m1>m2,才有v1'>0。否则,若v1'<0,即入射球m1返回,由于摩擦,入射球m1再回来时速度已经变小了,不再是原来的v1'了。
另外,若将上面的⑤式变形可得:,即碰撞前两球相互靠近的相对速度v1-0等于碰撞后两球相互分开的相对速度。由此可轻松记住⑤式。再结合①式也可很 容易解得⑥⑦式。 二、“一动碰一动”的弹性碰撞公式 问题:如图2所示,在光滑水平面上,质量为m1、m2的两球发生对心弹性碰撞,碰撞前速度分别为v1和v2,求两球碰撞后各自的速度? 图2 设碰撞后速度变为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能守恒定律得: m1v1+m2v2=m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 由③⑤式可以解出 ⑥ ⑦ 要记住上面⑥⑦式更是不容易的,而且推导也很费时间。如果采用下面等效的方法则可轻松记住。m1、m2两球以速度v1和v2发生的对心弹性碰撞,可等效成m1以速度v1去碰静 止的m2球,再同时加上m2球以速度碰静止的m1球。因此由前面“一动碰一静”的弹性碰撞公式,可得两球碰撞后各自的速度+; +,即可得到上面的⑥⑦式。 另外,若将上面的⑤式变形可得:,即碰撞前两球相互靠近的相对速度 v1- v2等于碰撞后两球相互分开的相对速度。由此可轻松记住⑤式,再结合①式可解得⑥⑦式。
沙漏控制培训资料
沙漏控制
沙漏控制 A1:有限元方法一般以节点的位移作为基本变量,单元内各点的位移以及应变均采用形函数对各节点的位移进行插值计算而得,应力根据本构方程由应变计算得到,然后就可以计算单元的内能了。如果采用单点积分(积分点在等参元中心),在某些情况下节点位移不为零(即单元有形变),但插值计算得到的应变却为零(譬如一个正方形单元变形为一个等腰梯形,节点位移相等但符号相反,各形函数相同,所以插值结果为0),这样内能计算出来为零(单元没变形!)。这种情况下,一对单元叠在一起有点像沙漏,所以这种模式称之为沙漏模式或沙漏。 现在有很多控制沙漏的专门程序,如控制基于单元边界的相对转动。但这些方法不能保持完备性。: 我主要讲一下物理的稳定性,在假设应变方法的基础上,建立沙漏稳定性的过程。在这些过程中,稳定性参数基于材料的性能。这类稳定性也称为物理沙漏控制。对于不可压缩材料,即使当稳定性参数是一阶的时候,这些稳定性方法也将没有自锁。在建立物理沙漏控制中,必须做出两个假设:1.在单元内旋转是常数。2.在单元内材料响应是均匀的。 A2:沙漏(hourglass)模式是一种非物理的零能变形模式,产生零应变和应力。沙漏模式仅发生在减缩积分(单积分点)体、壳和厚壳单元上。LS-DYNA里面有多种算法用于抑制沙漏模式。缺省的算法(type 1)通常不是最有效的算法,但却是最经济的。 一种完全消除沙漏的方法是转换到全积分或者选择减缩积分(S/R)方程的单元。但这种方法是一种下策。例如,第一,类型2体单元比缺省的单点积分体
单元计算开消大; 其二,在大变形应用时更不稳定(更容易出现负体积);其三,类型2体单元当单元形状比较差时在一些应用中会趋向于剪切锁死(shear-lock),因而表现得过于刚硬。 三角形壳和四面体单元没有沙漏模式,但缺点是在许多应用中被认为过于刚硬。减小沙漏的一个好的方法是细化网格,但这当然并不总是现实的。加载方式会影响沙漏程度。施加压力载荷优于在单点上加载,因为后者更容易激起沙漏模式。为了评估沙漏能,在*control_energy卡片中设置HGEN=2,而且用*database_glstat和*database_matsum卡分别输出系统和每一个部件的沙漏能。这一点是要确认非物理的沙漏能相对于每一个part的峰值内能要小(经验上来说<10%)。对于壳单元,可以绘制出沙漏能密度云图,但事先在 *database_extent_binary卡中设置SHGE=2。然后在LS-Prepost中选择Fcomp>Misc>hourglass energy。 对于流体部件,缺省的沙漏系数通常是不合适的(太高)。因此对于流体,沙漏系数通常要缩小一到两个数量级。对流体用基于粘性的沙漏控制。缺省的沙漏方程(type 1)对流体通常是可以的。 对于结构部件一般来说基于刚性的沙漏控制(type 4,5)比粘性沙漏控制更有效。通常,当使用刚性沙漏控制时,习惯于减小沙漏系数到0.03~0.05的范围,这样最小化非物理的硬化响应同时又有效抑制沙漏模式。对于高速冲击,即使对于固体结构部件,推荐采用基于粘性的沙漏控制(type 1,2,3)。 粘性沙漏控制仅仅是抑制沙漏模式的进一步发展,刚性沙漏控制将使单元朝未变形的方向变形。
高中物理公式推导(完全弹性碰撞后速度公式的推导)
高中物理公式推导一 完全弹性碰撞碰后速度的推导 1、简单说明: 1m 、2m 为发生碰撞的两个物体的质量,1v 、2v 为碰撞前1m 、2m 的速度,'1v 、' 2v 为碰撞后 1m 、2m 的速度。 2、推导过程: 第一,由动量守恒定理,得 ' 2'1 122112v m v m v m v m +=+ (1) 第二,由机械能守恒定律,得 2'22'112222112 2 1212121v m v m v m v m +=+(2) 令 12/m m k =,(1)、(2)两式同时除以1m ,得 ' ' 1 212kv v kv v +=+ (3) 2 '2 '1 2 2212 kv v kv v +=+ (4) (3)、(4)两式变形,得
( ) 2 ' '1 1--2v v k v v = (5) ()()()( ) 2 ' 2' '1 1 '1 1 22 -v v v v k v v v v -+=+ (6) 将(5)式代入(6)式,得 2' ' 1 12v v v v +=+ (7) 联立(5)、(7)两式,将' 1v 、 ' 2v 移到方程的左侧,则有 21' '1 2kv v kv v +=+ (8) 21' '1 --2v v v v += (9) 由(8)-(9),得 ()()21' 1-212 v k v v k +=+ 21' 11-122v k k v k v +++= 21212112' 1/1 -/1/22v m m m m v m m v +++= 2121 21121' -22v m m m m v m m m v +++= (10) 或者 ()2 12 1211' -22m m v m m v m v ++= (10)
[完全]弹性碰撞后的速度公式资料
[完全]弹性碰撞后的 速度公式
如何巧记弹性碰撞后的速度公式 一、“一动碰一静”的弹性碰撞公式 问题:如图1所示,在光滑水平面上,质量为m1的小球,以速度v1与原来静止的质量为m2的小球发生对心弹性碰撞,试求碰撞后它们各自的速度? 图1 设碰撞后它们的速度分别为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能(动能)守恒定律得: m 1v 1 =m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 联立①⑤解得 ⑥ ⑦ 上面⑥⑦式的右边只有分子不同,但记忆起来容易混。为此可做如下分析:当两球碰撞至球心相距最近时,两球达到瞬时的共同速度v共,由动量守恒定律得: m 1v 1 = (m1+m2)v共 解出v共=m1v1/(m1+m2)。而两球从球心相距最近到分开过程中,球m2继续受到向前的弹力作用,因此速度会更大,根据对称可猜想其速度恰好增大 一倍即,而这恰好是⑦式,因此⑦式就可上述推理轻松记住, ⑥式也就不难写出了。如果⑥式的分子容易写成m2-m1,则可根据质量m1的乒乓球以速度v1去碰原来静止的铅球m2,碰撞后乒乓球被反弹回,因此v1'应当是负的(v1'<0),故分子写成m1-m2才行。在“验证动量守恒定律”的实验中,要求入射球的质量m1大于被碰球的质量m2,也可由⑥式解释。因为只有m1>m2,才有v1'>0。否则,若v1'<0,即入射球m1返回,由于摩擦,入射球m1再回来时速度已经变小了,不再是原来的v1'了。
另外,若将上面的⑤式变形可得:,即碰撞前两球相互靠近的相 对速度v1-0等于碰撞后两球相互分开的相对速度。由此可轻松记住⑤ 式。再结合①式也可很容易解得⑥⑦式。 二、“一动碰一动”的弹性碰撞公式 问题:如图2所示,在光滑水平面上,质量为m1、m2的两球发生对心弹性碰撞,碰撞前速度分别为v1和v2,求两球碰撞后各自的速度? 图2 设碰撞后速度变为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能守恒定律得: m 1v 1 +m2v2=m1v1'+m2v2'① ② 由 ①③ 由②④ 由④/③⑤ 由③⑤式可以解出 ⑥ ⑦ 要记住上面⑥⑦式更是不容易的,而且推导也很费时间。如果采用下面等效的方法则可轻松记住。m1、m2两球以速度v1和v2发生的对心弹性碰撞,可等 效成m1以速度v1去碰静止的m2球,再同时加上m2球以速度碰静止的m1球。 因此由前面“一动碰一静”的弹性碰撞公式,可得两球碰撞后各自的速度 +;+,即可得到上面的⑥⑦式。
(完全)弹性碰撞后的速度公式
如何巧记弹性碰撞后得速度公式 一、“一动碰一静”得弹性碰撞公式 问题:如图1所示,在光滑水平面上,质量为m1得小球,以速度v1与原来静止得质量为m 2得小球发生对心弹性碰撞,试求碰撞后它们各自得速度? 图1 设碰撞后它们得速度分别为v1'与v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能(动能)守恒定律得: m1v1=m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 联立①⑤解得 ⑥ ⑦ 上面⑥⑦式得右边只有分子不同,但记忆起来容易混。为此可做如下分析:当两球碰撞至球心相距最近时,两球达到瞬时得共同速度v共,由动量守恒定律得: m1v1= (m1+m2) v共 解出v共=m1v1 /(m1+m2)。而两球从球心相距最近到分开过程中,球m2继续受到向前得弹力作用,因此速度会更大,根据对称可猜想其速度恰好增大一倍即,而这恰好就是⑦式,因此⑦式就可上述推理轻松记住,⑥式也就不难写出了。如果⑥式得分子容易写成m2-m1,则可根据质量m1得乒乓球以速度v1去碰原来静止得铅球m2,碰撞后乒乓球被反弹回,因此v1'应当就是负得(v1'<0),故分子写成m1-m2才行。在“验证动量守恒定律”得实验中,要求入射球得质量m1大于被碰球得质量m2,也可由⑥式解释。因为只有m1>m2,才有v1'>0。否则,若v1'<0,即入射球m1返回,由于摩擦,入射球m1再回来时速度已经变小了,不再就是原来得v1'了。 另外,若将上面得⑤式变形可得:,即碰撞前两球相互靠近得相对速度v1-0等于碰撞后两球相互分开得相对速度。由此可轻松记住⑤式。再结合①式也可很容易解得⑥⑦式。 二、“一动碰一动”得弹性碰撞公式 问题:如图2所示,在光滑水平面上,质量为m1、m2得两球发生对心弹性碰撞,碰撞前速度分别为v1与v2,求两球碰撞后各自得速度? 图2 设碰撞后速度变为v1'与v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能守恒定律得: m1v1+m2v2=m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 由③⑤式可以解出 ⑥ ⑦
碰撞速度公式
由于弹性碰撞后的速度公式不好推导,该公式又比较繁杂不好记。因此导致这类考题的得分率一直较低。下面探讨一下该公式的巧记方法。 一、“一动碰一静”的弹性碰撞公式 问题:如图1所示,在光滑水平面上,质量为m1的小球,以速度v1与原来静止的质量为m2的小球发生对心弹性碰撞,试求碰撞后它们各自的速度? 图1 设碰撞后它们的速度分别为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能(动能)守恒定律得: m1v1=m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 联立①⑤解得 ⑥ ⑦ 上面⑥⑦式的右边只有分子不同,但记忆起来容易混。为此可做如下分析:当两球碰撞至球心相距最近时,两球达到瞬时的共同速度v共,由动量守恒定律得: m1v1= (m1+m2)v共 解出v共=m1v1 /(m1+m2)。而两球从球心相距最近到分开过程中,球m2继续受到向前 的弹力作用,因此速度会更大,根据对称可猜想其速度恰好增大一倍即,而这恰好是⑦式,因此⑦式就可上述推理轻松记住,⑥式也就不难写出了。如果⑥式的分子容易写成m2-m1,则可根据质量m1的乒乓球以速度v1去碰原来静止的铅球m2,碰撞后乒乓球被反弹回,因此v1'应当是负的(v1'<0),故分子写成m1-m2才行。在“验证动量守恒定律”的实验中,要求入射球的质量m1大于被碰球的质量m2,也可由⑥式
解释。因为只有m1>m2,才有v1'>0。否则,若v1'<0,即入射球m1返回,由于摩擦,入射球m1再回来时速度已经变小了,不再是原来的v1'了。 另外,若将上面的⑤式变形可得:,即碰撞前两球相互靠近的相对速度v1-0等于碰撞后两球相互分开的相对速度。由此可轻松记住⑤式。再结合①式也可很容易解得⑥⑦式。 二、“一动碰一动”的弹性碰撞公式 问题:如图2所示,在光滑水平面上,质量为m1、m2的两球发生对心弹性碰撞,碰撞前速度分别为v1和v2,求两球碰撞后各自的速度? 图2 设碰撞后速度变为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能守恒定律得: m1v1+m2v2=m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 由③⑤式可以解出 ⑥ ⑦ 要记住上面⑥⑦式更是不容易的,而且推导也很费时间。如果采用下面等效的方法则可轻松记住。m1、m2两球以速度v1和v2发生的对心弹性碰撞,可等效成m1以速度v1去碰静止的m2球,再同时加上m2球以速度碰静止的m1球。因此由前面“一动碰一静”的弹性
LS-Dyna碰撞分析调试指南
LS-DYNA 碰撞分析调试 LS-DYNA碰撞计算模型的主要检查、调试项目有: a、质量增加百分比小于5%; b、总沙漏能小于5%; c、滑移界面能; d、检查各部件之间的连接、接触关系是否定义正确,检查模型的完整性; e、检查数值输出的稳定性。 一、质量缩放Mass scale的检查: 质量缩放——对于时间步长小于控制卡片中设置的最小时间步长的单元,我们通常采取增加单元材料密度的方法来增大其时间步长,以减短模型的计算时间。关于LS-DYNA中单元时间步长的计算方法请参见附录一。 1、初步检查。让模型在dyna中运行2个时间步,在Hyper view中调出glstat 文件并检查mass scaling项(质量增加应该小于5%);调出matsum文件并检查各部件的质量增加情况,对于质量增加过大以及有快速增长趋势的部件应检查此部件的网格质量和材料参数设置(质量增加一般是由于单元的特征长度太小或者是材料参数E、ρ设置错误,导致该单元的时间步长低于控制卡片中设置的最小时间步长,从而引起质量缩放)。 2、全过程检查。调整模型使其符合初步检查的标准,计算模型至其正常结束。再按[初步检查]的要求检查调试整个模型直至达到要求。一个计算收敛的模型在其整个计算过程中,最大质量缩放应小于总质量的5% 。 二、沙漏能Hourglass energy的检查: 沙漏能的出现是因为模型中采用了缩减积分引起的,我们常用的B-T单元采用的是面内单点积分,这种算法会引起沙漏效应(零能模式)。具体介绍参见附录二。 检查:在dyna中计算模型至其正常结束。在Hyper view中调出glstat文件并检查energy的total energy 、Hourglass energy两项,整个计算过程中沙漏能应小
高中物理公式推导完全弹性碰撞后速度公式的推导
高中物理公式推导完全弹性碰撞后速度公式的 推导 文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]
高中物理公式推导一 完全弹性碰撞碰后速度的推导 1、简单说明: 1m 、2m 为发生碰撞的两个物体的质量,1v 、2v 为碰撞前 1m 、2m 的速度,'1v 、'2v 为碰撞后1m 、2m 的速度。 2、推导过程: 第一,由动量守恒定理,得 ' 2'1122112v m v m v m v m +=+ (1) 第二,由机械能守恒定律,得 2'22'1122221122 1212121v m v m v m v m +=+(2) 令12/m m k =,(1)、(2)两式同时除以1m ,得 '' 1212kv v kv v +=+ (3) 2'2'122212 kv v kv v +=+ (4) (3)、(4)两式变形,得 ()2 ''11--2v v k v v = (5)
()()()()2'2''1 1'1122-v v v v k v v v v -+=+ (6) 将(5)式代入(6)式,得 2''112v v v v +=+ (7) 联立(5)、(7)两式,将' 1v 、' 2v 移到方程的左侧,则有 21''12kv v kv v +=+ (8) 21' '1--2v v v v += (9) 由(8)-(9),得 212121121' -22v m m m m v m m m v +++= (10) 或者 ()2121211' -22m m v m m v m v ++= (10) 由(8)+k*(9),得 221212121' 21v m m m v m m m m v +++-= (11) 或者 ()2122121'21m m v m v m m v ++-= (11) 3、意外收获:
Hourglass control 沙漏控制
沙漏(hourglass)模式是一种非物理的零能变形模式,产生零应变和应力。沙漏模式仅发生在减缩积分(单积分点)体、壳和厚壳单元上。LS-DYNA里面有多种算法用于抑制沙漏模式。缺省的算法(type 1)通常不是最有效的算法,但却是最经济的。 一种完全消除沙漏的方法是转换到全积分或者选择减缩积分(S/R)方程的单元。但这种方法是一种下策。例如,第一,类型2体单元比缺省的单点积分体单元计算开消大; 其二,在大变形应用时更不稳定(更容易出现负体积);其三,类型2体单元当单元形状比较差时在一些应用中会趋向于剪切锁死(shear-lock),因而表现得过于刚硬。 三角形壳和四面体单元没有沙漏模式,但缺点是在许多应用中被认为过于刚硬。 减小沙漏的一个好的方法是细化网格,但这当然并不总是现实的。 加载方式会影响沙漏程度。施加压力载荷优于在单点上加载,因为后者更容易激起沙漏模式。 为了评估沙漏能,在*control_energy卡片中设置HGEN=2,而且用*database_glstat和 *database_matsum卡分别输出系统和每一个部件的沙漏能。这一点是要确认非物理的沙漏能相对于每一个part的峰值内能要小(经验上来说<10%)。对于壳单元,可以绘制出沙漏能密度云图,但事先在 *database_extent_binary卡中设置SHGE=2。然后在LS-Prepost中选择Fcomp>Misc>hourglass energy。 对于流体部件,缺省的沙漏系数通常是不合适的(太高)。因此对于流体,沙漏系数通常要缩小一到两个数量级。对流体用基于粘性的沙漏控制。缺省的沙漏方程(type 1)对流体通常是可以的。 对于结构部件一般来说基于刚性的沙漏控制(type 4,5)比粘性沙漏控制更有效。通常,当使用刚性沙漏控制时,习惯于减小沙漏系数到0.03~0.05的范围,这样最小化非物理的硬化响应同时又有效抑制沙漏模式。对于高速冲击,即使对于固体结构部件,推荐采用基于粘性的沙漏控制(type 1,2,3)。 粘性沙漏控制仅仅是抑制沙漏模式的进一步发展,刚性沙漏控制将使单元朝未变形的方向变形。 类型8沙漏控制仅用于单元类型16的壳。这种沙漏类型激活了16号壳的翘曲刚度,因此单元的翘曲不会使解退化。如果使用沙漏控制8,16号壳单元可以用于解被称为扭曲梁(Twisted Beam)问题。 对于单元类型1的体和减缩积分2D体(shell types 13 & 15)类型6沙漏控制调用了一种假设应变协同转动方程。使用沙漏控制类型6和系数1.0,一个弹性部件在厚度方向仅仅需要划分一层类型1的体单元就可以获得正确的弯曲刚度。在隐式计算里面,对于类型1的体单元应该总是使用类型6的沙漏控制(实际上,在V970里面这是自动设置的)。 (More on type 6 HG control from Lee Bindeman) 类型6的沙漏控制与类型4,5不在于它用了一个假设应变场和材料属性来估算出假设应力场。这个应力在单元封闭域内进行积分得到沙漏力,因此单元表现的像一个有同样假设应变场的全积分单元。这种假设应变场设计成用来阻止纯弯曲中不真实的剪切变形和近似不可压材料中的体积锁死。 类型4和5的沙漏控制基于单元体积,波速和密度像在LS-DYNA理论手册中方程3.21那样来计算沙漏刚度。 沙漏类型6主要的改进是应力场在单元域内积分。这使得当使用大的长细比或者歪斜形状的体单元时沙漏控制非常鲁棒。类型4和5的沙漏控制对大长细比和歪斜形状单元反应变不好,它趋向于对某些沙漏模式反应的过于刚硬而对其它模式反应得过弱。 沙漏控制类型6另一个理论上的优点是对在厚度方向只有一个单元的梁可以在弹性弯曲问题中得到准确的解。要做到这一点,设置沙漏刚度参数为1.0。同样,对弹性材料方形截面杆的扭曲问题,当沙漏系数设为1.0时可以用很少的单元来解。然而,对于非线性材料,用粗糙的网格得到好的结果是不可能的,
完全弹性碰撞
§3-7 完全弹性碰撞 完全非弹性碰撞 一、碰撞(Collision ) 1.基本概念: 碰撞,一般是指两个或两个以上物体在运动中相互靠近,或发生接触时,在相对较短的时间内发生强烈相互作用的过程。 碰撞会使两个物体或其中的一个物体的运动状态发生明显的变化。 碰撞过程一般都非常复杂,难于对过程进行仔细 分析。但由于我们通常只需要了解物体在碰撞前后运动状态的变化,而对发生碰撞的物体系来说,外力的作用又往往可以忽略,因而可以利用动量、角动量以及能量守恒定律对有关问题求解。 2.特点: 1)碰撞时间极短 2)碰撞力很大,外力可以忽略不计,系统动量守恒 3)速度要发生有限的改变,位移在碰撞前后可以忽略不计 3.碰撞过程的分析: 讨论两个球的碰撞过程。碰撞过程可分为两个过程。开始碰撞时,两球相互挤压,发生形变,由形变产生的弹性恢复力使两球的速度发生变化,直到两球的速度变得相等为止。这时形变得到最大。这是碰撞的第一阶段,称为压缩阶段。此后,由于形变仍然存在,弹性恢复力继续作用,使两球速度改变而有相互脱离接触的趋势,两球压缩逐渐减小,直到两球脱离接触时为止。这是碰撞的第二阶段,称为恢复阶段。整个碰撞过程到此结束。 4.分类:根据碰撞过程能量是否守恒 1)完全弹性碰撞:碰撞前后系统动能守恒(能完全恢复原状); 2)非弹性碰撞:碰撞前后系统动能不守恒(部分恢复原状); 3)完全非弹性碰撞:碰撞后系统以相同的速度运动(完全不能恢复原状)。 二、完全弹性碰撞(Perfect Elastic Collision ) 在碰撞后,两物体的动能之和(即总动能)完全没有损失,这种碰撞叫做完全弹性碰撞。 解题要点:动量、动能守恒。 问题:两球m 1,m 2对心碰撞,碰撞前 速度分别为2010,v v ,碰撞后速度变为21,v v 动量守恒 2021012211v m v m v m v m (1) 动能守恒 2 20221012222112 1212121v m v m v m v m (2) 由(1) 22021011v v m v v m (3) 由(2) 2 2 2202210211v v m v v m (4) 由(4)/(3) 202101v v v v
完全弹性 碰撞的速度公式推导过程
完全弹性碰撞的速度公式推导过程 完全弹性碰撞的速度公式推导过程完全弹性碰撞的速度公式是怎么推导的无从得知,书上没讲,很多资料也没有讲,我想多半是为了不要影响思维的连贯性,所以将之省略了。我开始以为不复杂,就是上标下标看着烦人,所以就打算试着推导一下。谁知这个推导并没有想象中那么简单。第一次因为上下标搞混了,推导了半天没结果就放一边了。第二次仔细地推导,花了更多的时间,结果还是一塌糊涂。我终于明白书上为什么没有把这个推导过程放在书里了,的确是太复杂,学习的时候多半会干扰对碰撞本身的关注。但是这么放弃也有点不甘心,就又花了些时间,第三次准备将其推导出来。闲人可以看看,我也是放假闲着没事推导的,实在是很复杂很恐怖的推导。我自己都不想再看,因为象那样用常规的方式根本就推导不出来! 动量守恒定律: MpVp'+MqVq'=MpVp+MqVq(1-1) 动能守恒: (1/2)MpVp'2+(1/2)MqVq'2=(1/2)MpVp2+(1/2)MqVq2(1-2) 前两次推导吃了亏,所以第三次推导前仔细看了看书上结果公式的特点。有这样几个地方需要注意: 1、撞击后有两个速度,我们需要求的结果分别是这两个速度; 2、任一撞后的速度公式中,不能有另一个待求的速度,也就是Vp'的速度公式中,不能出现Vq',反之亦然; 3、这两组等式看上去比较对称,要设法利用这个关系; 4、由于上下标众多,推演起来很费眼,要准备使用复合式进行合并,以简化推演过程,最后再将其还原出来,形成最终的分离式,并整理。(具体见后面的备注,确实需要备注来记住这个过程,免得再走弯路) …. 至此,跟书上给出的公式差距越来越大,推导已经变得无比复杂了。再继续推导下去,除了浪费时间,就是浪费精力,只有停下来了。第三次推导仍以失败结束。之前也在网上搜索了很多的信息,大多数都说联立求解,就象我刚才做的那样,现在网上的信息泛滥与良莠不齐的确误导了不少像我这样的人。一时不知如何是好,休息了一阵,觉得还是只有在网上找找资料,要是翻书的话更是无从下手。在搜索条件的设置上,我略过了包含百度、搜狗、中学、高中之类的信息,因为这类回答通常都很简单,且充斥着随意和缺乏管理的编排。这样一来,信息比较集中和丰富了,然后把快照一页一页的翻看着。大概过了十多分钟,有一篇PPT 格式的文章出现了,于是我把它取了下来。打开一看,心里有点高兴,这是台湾老师做的课件。台湾人写的东西比较人性化,很多细节也会一五一十的说出来,而且是用很口语化的方式说出来,就像在跟人聊天一样。比如台湾有个程序员李维,他写的书就很平淡,甚至可以说是大白话,但是就目的而言,是完全没有问题的,而且省去了几倍另外查找资料、自己再写程序尝试的时间。另一个擅长C++剖析的侯捷,写的技术书或资料就像散文一般华丽,在众多台湾的写家里面也是独树一帜的。完全不像我们平时看的一些资料平淡无奇,藏着掖着,掐头去尾的,该省的不省,不该省的全省了。尽管这是个PPT 的课件,没有具体讲述推导的过程,但它还是给了一个推导的线索。最后才明白要用一个很怪异的方式,把碰撞速度公式极为简单地推导出来。为了省去翻页的麻烦,我再把两个守恒公式写在下面: 动量守恒定律: MpVp'+MqVq'=MpVp+MqVq(1-1) 动能守恒: 对两个方程做同样的整理,把M 一样的放在一边,如下: Mp(Vp-Vp')=Mq(Vq'-Vq)(1-3) Mp(Vp2-Vp'2)=Mq(Vq'2-Vq2)(1-4) 这两个整理后的方程看上去很工整,形式差别不大,只是动能方程中的四个速度多了个平方,其它都一样。正是这个成了巧妙推导的基础。因为两个方程左右两边相等,所以分别在两边相除的话,等式还是成立的。在(1-4)两边分别除以(1-3)的两边,就能分别约去Mp 和Mq,形成一个新的方程,见下: 对这个新的方程,该怎样处理呢?PPT 课件没有给个说法,而是直接给出了Vp+Vp'=Vq'+Vq(1-6) 的结论,并用这个结论推导速度公式,尽管结论跟书上是一致的,但刚开始我还是没有搞明白这是怎么一回事。想了一阵才顿悟: 因为: a2-b2=(a+b)(a-b) 因此,(1-5)式可以写成: 两边约去相减的那个因式,这时Vp+Vp'=Vq'+Vq,也就是(1-6)式就成立了。将(1-6)式进行整理,分别建立Vp'和Vq'的等式,如下: Vp'=Vq'+Vq-Vp(1-7) Vq'=Vp+Vp'-Vq(1-8) 现在将(1-7)式代入(1-1)中,有Mp(Vq'+Vq-Vp)+MqVq'=MpVp+MqVq
弹性碰撞后的速度公式
一、“一动碰一静”的弹性碰撞公式 问题:如图1所示,在光滑水平面上,质量为m1的小球,以速度v1与原来静止的质量为m2的小球发生对心弹性碰撞,试求碰撞后它们各自的速度? 图1 设碰撞后它们的速度分别为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能(动能)守恒定律得: m1v1=m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 联立①⑤解得 ⑥ ⑦ 上面⑥⑦式的右边只有分子不同,但记忆起来容易混。为此可做如下分析:当两球碰撞至球心相距最近时,两球达到瞬时的共同速度v共,由动量守恒定律得: m1v1= (m1+m2)v共 解出v共=m1v1/(m1+m2)。而两球从球心相距最近到分开过程中,球m2继续受到向前的弹力作用,因此速度会更大,根据对称可猜想其速度恰好增大一倍即,而这恰好是⑦式,因此⑦式就可上述推理轻松记住,⑥式也就不难写出了。如果⑥式的分子容易写成m2-m1,则可根据质量m1的乒乓球以速度v1去碰原来静止的铅球m2,碰撞后乒乓球被反弹回,因此v1'应当是负的(v1'<0),故分子写成m1-m2才行。在“验证动量守恒定律”的实验中,要求入射球的质量m1大于被碰球的质量m2,也可由⑥式解释。因为只有m1>m2,才有v1'>0。否则,若v1'<0,即入射球m1返回,由于摩擦,入射球m1再回来时速度已经变小了,不再是原来的v1'了。 另外,若将上面的⑤式变形可得:,即碰撞前两球相互靠近的相对速度v1-0等于碰撞后两球相互分开的相对速度。由此可轻松记住⑤式。再结合①式也可很容易解得⑥⑦式。 二、“一动碰一动”的弹性碰撞公式 问题:如图2所示,在光滑水平面上,质量为m1、m2的两球发生对心弹性碰撞,碰撞前速度分别为v1和v2,求两球碰撞后各自的速度? 图2 设碰撞后速度变为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能守恒定律得:
沙漏控制的个人整理
1.沙漏的定义 沙漏hourglassing一般出现在采用缩减积分单元的情况下: 比如一阶四边形缩减积分单元,该单元有四个节点“0”,但只有一个积分点“*”。而且该积分点位于单元中心位置,此时如果单元受弯或者受剪,则必然会发生变形,如下图a所示。 但是,现实的情况却是在这三种情况下,单元积分点上的主应力和剪应力状况都没有发生变化,也就是说该单元可以自由地在这三种形态之间转变而无需外力。 很小的扰动理论上可以让单元无限地变形下去,而不会消耗任何能量,这就是所谓的沙漏的零能量模式。这时就要对沙漏进行控制,比如人为地给单元加上一定的刚度。 沙漏的影响范围: 沙漏只影响实体和四边形单元以及二维单元,而四面体单元、三角形壳单元、梁单元没有沙漏模式,但四面体单元、三角形壳单元缺点是在许多应用中被认为过于刚硬。 沙漏影响的查看、判断: 当显式动态分析使用缩减积分单元时,应判断沙漏是否会显著的影响结果。一般准则是,沙漏能量不能超过内能的10%。 沙漏能量和内能的对比可在ASCⅡ文件GLSTAT和MATSDM中看出(这两个需要在前处理时设置,或在K文件中设置:在*control_energy卡片中设置HGEN=2,而且用*database_glstat和*database_matsum卡分别输出系统和每一个部件的沙漏能),也可在POST20中画出。为确保这些文件中记录沙漏能量结果,注意EDENERGY 中的HGEN应设为1。 对于壳单元,可以绘制出沙漏能密度云图,但事先在*database_extent_binary 卡中设置SHGE=2。然后在LS-Prepost中选择Fcomp>Misc>hourglass energy。 2.在LS-DYNA里的沙漏控制方法 1)细化模型网格:好的建模可以防止产生过度沙漏,基本原则是使用均匀网格。 (一般来说,整体网格细化会明显地减少沙漏的影响。) 2)避免在单点上集中加载:由于激活的单元把沙漏模式传递给相邻单元,所以 点加载应扩展到几个相邻节点组成的一个面上,施加压力载荷优于在单点上加载。
Ls_dyna 沙漏控制考试试题
Ls_dyna 沙漏控制考试试题 一、选择题 1、沙漏能影响和以及单元,但不能影响三角形壳单元和梁单元。 A、实体单元 B、四边形单元 C、一维单元 D、二维单元 2、一般情况下,如果沙漏能量超过总能量的,那么就需要调整沙漏控制,以保证计算结果的精度。 A、10% B、15% C、20% D、25% 3、沙漏模式是一种非物理的变形模式,产生零应变和应力。 A、超能 B、零能 C、刚性 D、柔性 4、如果系统计算沙漏能并将其输出,必须设置关键字*CONTROL_ENERGY中的控制参数HGEN = 。 A、2 B、3 C、4 D、5 5、在*SECTION_SHELL中,没有沙漏模式的壳单元公式和。 A、1 B、2 C、6 D、7 6、如果不考虑计算成本,使用单元的方法,可以有效地控制沙漏现象。 A、全积分 B、单点积分 C、缩减积分 D、选择性缩减积分 7、在关键字*CONTROL_HOURGLASS全局控制沙漏中,QH一般取值范围之间,如果超过这个范围将引起计算不稳定。 A、0—0.05 B、0.05—0.15 C、0.15—0.20 D、0.20—0.25 8、如果需要针对每个PART单独控制,需要定义关键字。 A、*PART B、*CONTROL_HOURGLASS C、*CONTROL_ENERGY D、*HOURGLASS 9、在关键字*HOURGLASS中设定沙漏系数是项。 A、IBQ B、QM C、Q1 D、Q2 10、在Ls_dyna关键字*CONTROL_HOURGLASS全局控制沙漏中,QH默认值是。 A、0.1 B、1 C、0.01 D、0.001 选择题参考答案: 1、ABD 2、A 3、B 4、A 5、CD 6、AD 7、B 8、D 9、B 10、A 二、有限单元单点积分方法可以大幅度降低计算成本,但容易沙漏模式,产生一种自然振荡并且比所有结构响应的同期短得多。沙漏变形没有刚度并产生锯齿形
(完全)弹性碰撞后的速度公式
(完全)弹性碰撞后的速度公式
如何巧记弹性碰撞后的速度公式 一、“一动碰一静”的弹性碰撞公式 问题:如图1所示,在光滑水平面上,质量为m1的小球,以速度v1与原来静止的质量为m2的小球发生对心弹性碰撞,试求碰撞后它们各自的速度? 图1 设碰撞后它们的速度分别为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能(动能)守恒定律得: m1v1=m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 联立①⑤解得 ⑥ ⑦
上面⑥⑦式的右边只有分子不同,但记忆起来 容易混。为此可做如下分析:当两球碰撞至球心 ,由相距最近时,两球达到瞬时的共同速度v 共 动量守恒定律得: m1v1= (m1+m2) v共 解出v =m1v1 /(m1+m2)。而两球从球心相共 距最近到分开过程中,球m2继续受到向前的弹力作用,因此速度会更大,根据对称可猜想其速度恰好增大一倍即,而这恰好是⑦式,因此⑦式就可上述推理轻松记住,⑥式也就不难写出了。如果⑥式的分子容易写成m2-m1,则可根据质量m1的乒乓球以速度v1去碰原来静止的铅球m2,碰撞后乒乓球被反弹回,因此v1'应当是负的(v1'<0),故分子写成m1-m2才行。在“验证动量守恒定律”的实验中,要求入射球的质量m1大于被碰球的质量m2,也可由⑥式解释。因为只有m1>m2,才有v1'>0。否则,若v1'<0,即入射球m1返回,由于摩擦,入射球m1再回来时速度已经变小了,不再是原来的v1'了。
另外,若将上面的⑤式变形可得:,即碰撞前两球相互靠近的相对速度v1-0等于碰撞后两球相互分开的相对速度。由此可轻松记住⑤式。再结合①式也可很容易解得⑥⑦式。 二、“一动碰一动”的弹性碰撞公式 问题:如图2所示,在光滑水平面上,质量为m1、m2的两球发生对心弹性碰撞,碰撞前速度分别为v1和v2,求两球碰撞后各自的速度? 图2 设碰撞后速度变为v1'和v2',在弹性碰撞过程中,分别根据动量守恒定律、机械能守恒定律得: m1v1+m2v2=m1v1'+m2v2'① ② 由①③ 由②④ 由④/③⑤ 由③⑤式可以解出 ⑥
弹性碰撞碰后速度的简单求法
弹性碰撞碰后速度的简 单求法 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT
关于弹性碰撞碰后速度的另一种求法 【摘要】传统的弹性碰撞中根据动能守恒和动量守恒能求出碰后速度;本文认为在弹性碰撞中两个发生形变的物体,碰撞后形变复原包含另一种解题思路,可以让计算变的简单。 【关键词】弹性碰撞 碰后速度 在高中课本中关于弹性碰撞问题(本文所指均为正碰),有这样一种类型的题目:两物体发生完全弹性碰撞,设物体1质量为m1,碰前速度为v1,物体2质量为m2,碰撞前速度为v2,求两碰撞物体碰撞后的速度v1',v2'。通常的做法是列如下两个方程: ''22112211v m v m v m v m +=+① 2222112 22211'2/1'2/12/12/1v m v m v m v m +=+ ② 方程1为碰撞符合动量守恒定理的数学表达式,而方程2为碰撞符合能量守恒定理的表达式,这种方法虽然容易理解,但计算起来比较麻烦。接下来我介绍另一种计算方法。 同样的问题用下列方程组解答: ''22112211v m v m v m v m +=+ ③ 2'2'2211v v v v +=+ ④ 可以看到方程3和方程1相同,方程4比方程2简单的多,而方程1和方程2构成的方程组与方程3和方程4构成的方程组求得的碰撞后速度'1v ,'2v 的值是一样的。在高中的历次考试中我均用此方法很快的求出了最后结果。接下来我就为这个方程组的合理性进行证明。
证明:由于在弹性碰撞前后两个相碰撞的物体的相对位置不变,因此在整个碰撞过程中,两碰撞物体的平均速度相同,设为-1v =- 2v =v 。因此只要证明完全弹性碰撞过程中每个碰撞物体碰前速度和碰后速度的平均值为整个碰撞过程中该物体碰撞过程的平均速度即可。 我们以整个弹性碰撞过程中的平均速度v 为参照系,则物体一的碰前和碰后速度分别为(v v -1)和(v v -'1),物体二的碰前速度和碰后速度分别为(v v -2)和(v v -'2)。则两碰撞物体(在此假设为两个小球)碰撞过程可以简化为:两个相向运动的小球,在中间一点碰撞后又相互弹开,在这个过程中没有发生同方向运动,即两小球速度同时降为零,然后又向相反方向弹开。之后的证明可以分为两种方式。 方式一:在以平均速度v 为参照系的情况下,由于两球没有发生同向运动,因此如果在两碰撞小球速度降为零时,发生形变的接触面上放一极薄的挡板,则两球受力完全不变,即小球运动方式同两球相撞完全相同,但此时两小球相碰已被分隔成两弹性小球从两侧撞击一挡板并被反弹回来。在弹性碰撞中,小球撞一挡板,会以原速度反弹回去,因此在这里小球碰撞前的速度应该与碰后的速度大小相等方向相反,即:小球一满足公式 )'(11v v v v --=- 可变化为 2' 11v v v += 小球二满足公式 )'(22v v v v --=- 可变化为 2'22v v v += 公式4得证。
LS_DYNA用户使用手册(中)
第八章 刚性体 用刚性体定义有限元模型中的刚性部分可以大大减少显式分析的计算时间。这是由于定义一个刚性体后,刚性体内所有节点的自由度都耦合到刚性体的质心上。因此,不论定义了多少节点,刚性体仅有六个自由度。缺省设置时,每个刚性体的质量、质心和惯性都由刚性体体积和单元的密度计算得到。作用在刚性体上的力和力矩由每个时间步的节点力和力矩合成,然后计算刚性体的运动,位移就会转换到节点上。 ANSYS/LS-DYNA中,将分析中保持刚性特性的刚性体定义为一种材料模型。用E DMP命令定义该种类型的刚性体,对于定义材料模型的详细信息,参看第7章,Material Models。 另外,可以用EDCRB命令把两个刚体结合在一起,它们的作用如同一个刚性体。但与刚性体的定义不同的是,它主要依据材料号,根据PARTID定义的刚体约束和一个约束方程号。因此,为了在两个物体间施加刚体约束,必须执行命令EDCRB, ADD, NEQN, PARTS,NEQN为约束方程参考编号,P ARTM是主刚体part号,P ARTS是从刚体part号。必须注意不能用同一个NEQN值执行多个EDCRB命令,仅使用最后一个NEQN值。当使用EDCRB命令时,第二个刚性体将被第一个刚性体吸收,因而此后对第二个刚性体的任何操作将无效. 8.1 定义惯性特性 缺省时,程序将计算每个刚体的惯性特性。但是,用户可能会发现给刚性体设定重力、质量、初始速度(在整体或局部坐标系)的特定中心和特定惯性张量是很有用的,而不是依赖于求解过程中由有限元模型计算得到的值。可以用EDIPART来定义刚性体的任意特征,命令格式如下: 其中:PART-定义惯性的part ID Option-要执行的选项 Cvect-包括部件质心坐标系的矢量 TM-平移质量 IRCS-惯性张量参考坐标系的标志 Ivect-包括惯性张量分量的矢量 Vvect-包括刚体初始速度的矢量 CID-局部坐标系 ID 如果采用ANSYS/LS DYMA GUI路径,可以采用下列路径Main Menu>Preprocessor>LS-DYNA Options>Inertia Options>Define Inertia。输入上述所有参数,包括所需的矩阵参数。对于批处理输入,在执行EDIPART命令前需定义数组(*DIM)并输入数据参数。下例说明了怎样定义部件2的惯性特性,此为一个刚性体。 !定义参数输入 tm=0.6300E-03 平移质量 ircs=0 坐标系标志