GPS静态测量概念
《GPS定位原理及应用》授课教案
第八章GPS测量的设计与实施
8.1 GPS测量的技术设计
教学内容:本节主要介绍GPS测量技术设计的一般要求和设计指标。
教学重点:
1.介绍GPS测量技术设计的依据;
2.介绍GPS测量的标准;
3.介绍GPS测量的图形设计。
教学难点:GPS的图形设计。
教学方法:课堂教学为主,充分利用多媒体教学方法。
教学要求:
学会局部性的GPS控制网的图形设计,掌握GPS测量技术设计书的编写。
8.1.1 GPS网技术设计的依据
1.GPS测量规范(规程)
(1)《全球定位系统(GPS)测量规范》
(2)《全球定位系统城市测量技术规程》
(3)各行业部门的其他GPS测量规程或细则
2.测量任务书
8.1.2 GPS网的精度, 密度设计
1.GPS测量精度标准及分类
(1)GPS测量精度分类
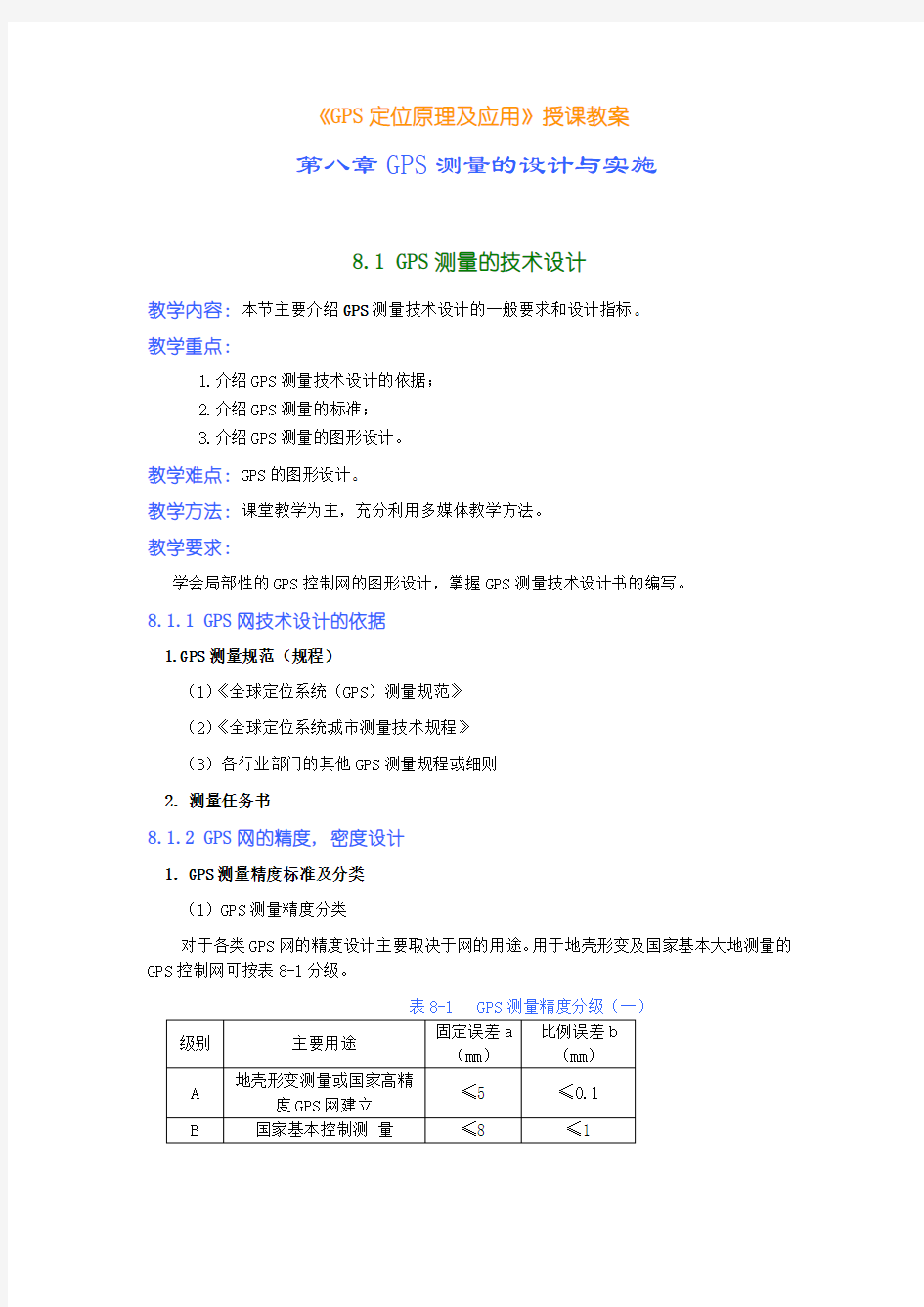
对于各类GPS网的精度设计主要取决于网的用途。用于地壳形变及国家基本大地测量的GPS控制网可按表8-1分级。
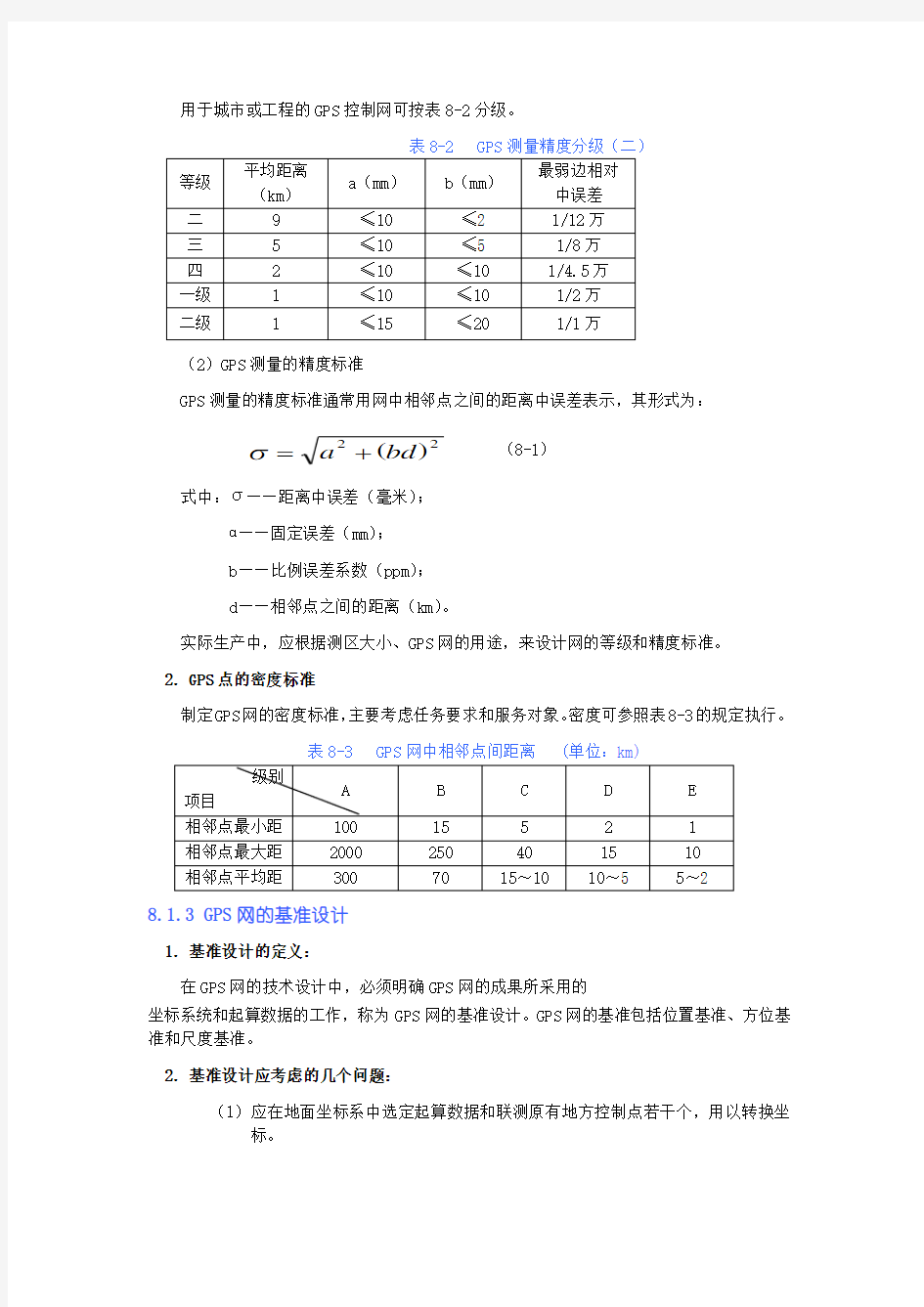
用于城市或工程的GPS控制网可按表8-2分级。
(2)GPS测量的精度标准
GPS测量的精度标准通常用网中相邻点之间的距离中误差表示,其形式为:
σ(8-1)
2)
2
(bd
=
a+
式中:σ——距离中误差(毫米);
ɑ——固定误差(mm);
b——比例误差系数(ppm);
d——相邻点之间的距离(km)。
实际生产中,应根据测区大小、GPS网的用途,来设计网的等级和精度标准。2.GPS点的密度标准
制定GPS网的密度标准,主要考虑任务要求和服务对象。密度可参照表8-3的规定执行。
8.1.3 GPS网的基准设计
1.基准设计的定义:
在GPS网的技术设计中,必须明确GPS网的成果所采用的
坐标系统和起算数据的工作,称为GPS网的基准设计。GPS网的基准包括位置基准、方位基准和尺度基准。
2.基准设计应考虑的几个问题:
(1)应在地面坐标系中选定起算数据和联测原有地方控制点若干个,用以转换坐标。
(2)对GPS 网内重合的高等级国家点或原城市等级控制点,除未知点连结图形观
测外,对它们也要适当地构成长边图形。 (3)联测的高程点需均匀分布于网中,对丘陵或山区联测高程点应按高程拟合曲
面的要求进行布设。
(4)新建GPS 网的坐标应尽可能与测区过去采用的坐标一致。
8.1.4 GPS 网构成的几个基本概念及网特征条件
1.GPS 网图形构成的几个基本概念
观测时断:测站上开始接收卫星信号到观测停止,连续工作的时间段,简称时段。 同步观测:两台或两台以上接收机同时对同一组卫星进行的观测。
同步观测环:三台或三台以上接收机同步观测获得的基线向量所构成的闭合环,简称同步环。
独立观测环:由独立观测所获得的基线向量构成的闭合环,简称独立环。
异步观测环:在构成多边形环路的所有基线向量中,只要有非同步观测基线向量,则该多边形环路叫异步观测环,简称异步环。
独立基线:对于N 台GPS 接收机的同步观测环,有J 条同步观测基线,其中独立基线数为N-1。
非独立基线:除独立基线外的其它基线叫非独立基线,总基线数与独立基线之差即为非独立基线数。
2.GPS 网特征条件的计算 观测时断数 : N
m n C
/?= (8-2)
式中:n 为网点数,m 为每点设站数,N 为接收机数。 总基线数:1)/2-N (N C ??=总
J
(8-3)
必要基线数:1n J -=必
(8-4)
独立基线数:)1N (C J
-?=独
(8-5)
多余基线数:)1n ()1N (C ---?=多
J
(8-6)
3.GPS 网同步图形构成及独立边的选择
根据(8-3)式, 对于由N 台GPS 接收机构成的同步图形中一个时断包含的GPS 基线数为:
1)/2-N (N ?=J (8-7)
但其中仅有N-1条是独立的GPS 边,其余为非独立边。当接收机数N=2~5时所构成的同步图形见图8-1。
对应于图8-1的独立GPS边可以有如图8-2所示的不同选择。
当同步观测的GPS接收机数N≥3时,同步闭合环的最少数应为:
=N
-
N
J
T(8-8)
=
N
-
)(
-
1
2/)2
(-
)1
(
N与J、T的关系见下表:
8.1.5 GPS网的图形设计
1.GPS网的图形设计
根据对所布设的GPS网的精度要求和其它方面的要求,设计出独立的GPS边构成的多边形网,称为GPS网的图形设计。
2.GPS网的图形
(1)点连式:如图8-3,相邻同步图形之间仅有一个公共点的连接。
(2)边连式:如图8-4,同步图形之间由一条公共基
线连接。
(3)网连式:指相邻同步图形之间有两个以上公共点相连接。
(4)边点混合连接式:如图8-5,把点连式与边连式有机地结合起来,组成GPS网的方式。
(5)三角锁连接:如图8-6,用点连式或边连式组成连续发展的三角锁同步图形。
(6)导线网形连接:如图8-7。
(7)星形布设:如图8-8
8.2 GPS测量的外业准备及技术设计书编写
教学内容:本节主要介绍GPS测量技术设计书的编写要求和内容。
教学重点:
1.介绍GPS测量的外业准备工作;
2.介绍GPS接收机检验的内容;
3.介绍GPS测量技术设计书的编写方法。
教学难点:GPS接收机的检验和设计书的编写。
教学方法:课堂教学为主,充分利用多媒体教学方法。
教学要求:了解GPS接收机检验的内容和方法,掌握GPS测量技术设计书的编写。8.2.1 测区踏勘
测区踏勘主要了解下列情况:
1、交通情况;
2、水系分布情况;
3、植被情况;
4、控制点分布情况;
5、居民点分布情况;
6、当地风俗民情。
8.2.2 资料收集
1、各类图件;
2、各类控制点成果;
3、测区有关的地质、气象、交通、通讯等方面的资料;
4、城市及乡、村行政区划表。
8.2.3 设备、器材筹备及人员组织
设备、器材筹备及人员组织包括以下内容:
1、筹备仪器、计算机及配套设备;
2、筹备机动设备及通讯设备;
3、筹备施工器材,计划油料,材料的消耗;
4、组建施工队伍,拟定施工人员名单及岗位;
5、进行详细的投资预算。
8.2.4 拟定外业观测计划
1.拟定观测计划的主要依据:
(1)GPS网的规模大小;
(3)GPS卫星星座几何图形强度;
(4)参加作业的接收机数量;
(5)交通、通讯及后勤保障。
2.观测计划的主要内容:
(1)编制GPS卫星的可见性预报图;
(2)选择卫星的几何图形强度;
(3)选择最佳观测时断;
(4)观测区域的设计与划分;
(5)编排作业调度表;作业调整度表见表8-6。
(6)采用规定格式GPS测量外业观测通知(见表8-7)单进行调度。
8.2.5 设计GPS网与地面网的联测方案
GPS网与地面网的联测,可根据测区地形变化和地面控制点的分布而定,一般在GPS 网中至少要重合观测三个以上的地面控制点作为约束点。
8.2.6 GPS接收机选型及检验
1.接收机的选用
接收机的选用可参考下表:
2.接收机的检验
接收机全面检验的内容,包括一般性检视、通电检验和实测检验。
(1)一般检验:主要检查接收机设备各部件及其附件是否齐全、完好,紧固部分是否松动与脱落,使用手册及资料是否齐全等。
(2)通电检验:接收机通电后有关信号灯、按键、显示系统和仪表的工作情况,以及自测试系统的工作情况,当自测正常后,按键作步骤检验仪器的工作情况。
(3)实测检验:测试检验是GPS接收机检验的主要内容。其检验方法有:用标准基线检验;已知坐标、边长检验;零基线检验;相位中心偏移量检验等。
①用零基线检验接收机内部噪声水平。
基线测试方法如下:
●选择周围高度角10○以上无障碍物的地方安放天线,按图8-9连天线、功分器和接收机。
●连接电源,二台GPS接收机同步接收四颗以上卫星1~1.5h。
●交换功分器与接收机接口,再观察一个时段。
●用随机软件计算基线坐标增量和基线长度。基线误差应少于1mm。否则应送厂检修或降低级别使用。
②天线相位中心稳定性检验
●该项检验可在标准基线、比较基线或GPS检测场上进行。
●检测时可以将GPS接收机带天线两两配对,置于基线的两端点。
●按上述方法在与该基线垂直的基线中(不具备此条件,可将一个接收机天线固定指北,其它接收机天线绕轴顺时针转动90°,180°,270°)进行同样观察。
●观测结束,用随机软件解算各时段三维坐标。
③GPS接收机不同测程精度指标的测试。
该项测试应在标准检定场进行。检定场应含有短边和中长边。基线精度应达到1*10-5。
检验时天线应严格整平对中,对中误差小于±1mm。天线指向正北,天线高量至1mm。测试结果与基线长度比较,应优于仪器标称精度。
④仪器的高度低温试验:对于有特殊要求时需对GPS接收机进行高、低温测试。
⑤对于双频GPS接收机应通过野外测试,检查在美国执行SA技术时其定位精度。
⑥用于天线基座的光学对点器在作业中应经常检验,确保对中的准确性,其检校参照控制测量中光学对点器核校方法。
8.2.7 技术设计书编写
资料收集全后,编写技术设计,主要编写内容如下:
1.任务来源及工作量
包括GPS项目的来源、下达任务的项目、用途及意义;GPS测量点的数量(包括新定点数、约束点数、水准点数、检查点数);GPS点的精度指标及坐标、高程系统。
2.测区概况
测区隶属的行政管辖;测区范围的地理坐标,控制面积;测区的交通状况和人文地理;测区的地形及气候状况;测区控制点的分布及对控制点分析、利用和评价。
3.布网方案
GPS网点的图形及基本连接方法;GPS网结构特征的测算;点位布设图的绘制。
4.选点与埋标
GPS点位的基本要求;点位标志的选用及埋设方法;点位的编号等。
5.观测
对观测工作的基本要求;观测纲要的制定;对数据采集提出注意的问题
6.数据处理
数据处理的基本方法及使用的软件;起算点坐标的决定方法,闭合差检验及点位精度的评定指标。
7.完成任务的措施
要求措施具体,方法可靠,能在实际工作中贯彻执行。
8.3 GPS测量的外业实施
GPS测量外业实施包括:GPS点的选埋、观测、数据传输及数据预处理等工作。
8.3.1选点
选点工作应遵守以下原则:
1.点位应设在易于安装接收设备。视野开阔的较高点上。
2.点位目标要显著,视场周围15°以上不应有障碍物,以减少GPS信号被遮挡或障碍物吸收。
3.点位应远离在功率无线电发射源(如电视机、微波炉等)其距离不少于200m;远离高压输电线,其距离不得少于50m。以避免电磁场对GPS信号的干扰。
4.点位附近不应有在面积水域或不应有强烈干扰卫星信号接收的物体,以减弱多路径效应的影响。
5.点位应选在交通方便,有利于其它观测手段扩展与联测的地方。
6.地面基础稳定,易于点的保存。
7.选点人员应按技术设计进行踏勘,在实地按要求选定点位。
8.网形应有利于同步观测边、点联结。
9.当所选点位需要进行水准联测时,选点人员应实地踏勘水准路线,提出有关建议。
10.当利用旧点时,应对旧点的稳定性、完好性,以及觇标是否安全可用作一检查,符合要求方可利用。
8.3.2标志埋设
GPS网点一般应埋设具有中心标志的标石,以精确标志点位,点的标石和标志必须稳定、坚固以利长久保存和利用。在基岩露头地区,也可以直接在基岩上嵌入金属标志。
表8-9 GPS点点之记
日期:年月日记录者:绘图者:校对者:
每个点标石埋设结束后,应按表8-9填写点之记并提交以下资料:
1.点之记
2.GPS网的选取点网图;
3.土地占用批准文件与测量标志委托保管书;
4.选点与埋石工作技术总结。
8.3.3观测工作
1.观测工作依据的主要技术指标
表8-10 各级GPS测量作业的基本技术要求
2.天线安置
①在正常点位,天线应架设在三脚架上,并安置在标志中心的上方直接对中,天线基座上的圆水准气泡必须整平。
②殊点位,当天线需要安置在三角点觇标的观测台或回光台上时应先将觇顶拆除,防止对GPS信号的遮挡。
天线的定向标志应指向正北,并顾及当地磁偏角的影响,以减弱相位中心偏差的影响。天线定向误差依定位精度不同而异,一般不应超过±3o~5o。
③刮风天气安置天线时,应将天线进行三向固定,以防倒地碰坏。雷雨天气安置时,应该注意将其底盘接地,以防雷击天线。
④架设天线不宜过低,一般应距地1m以上。天线架设好后,在圆盘天线间隔120○的三个方向分别量取天线高,三次测量结果之差不应超过3mm,取其三次结果的平均值记入测量手薄中,天线高记录取值0.001m。
⑤测量气象参数:在高精度GPS测量中,要求测定气象元素。每时段气象观测应不少于3次(时段开始、中间、结束。)气压读至0.1mbar,气温读至0.1oC,对一般城市及工程测量只记录天气状况。
⑥复查点名并记入测量手薄中,将天线电缆与仪器进行联接,经检查无误后,方能通电启动仪器。
3.开机观测
观测作业的主要目的是捕获GPS卫星信号,并对其进行跟踪、处理和量测,以获得所需要的定位信息和观测数据。
天线安置完成后,在离开天线适当位置的地面上安放GPS接收机,接通接收机与电源、天线、控制器的联接电缆,并经过预热和静置,即可启动接收机进行观测。
通常来说,在外业观测工作中,仪器操作人员应注意以下事项:
①当确认外接电源电缆及天线等各项连接完全无误后,方可接通电源,启动接收机。
②开机后接收机有关指示显示正常并通过自测后,方能输入有关测站和时段控制信息。
③接收机在开始记录数据后,应注意查看有关观测卫星数量、卫星号、相位测量残差、实时定位结果及其变化、存储介质记录等情况。
④一个时段观测过程中,不允许进行以下操作:关闭又重新启动;进行自测试(发现故障除外);改变卫星高度角;改变天线位置;改变数据采样间隔;按动关闭文件和删除文件等功能键。
⑤每一观测时段中,气象元素一般应在始、中、末各观测记录一次,当时段较长时可适当增加观测次数。
⑥在观测过程中要特别注意供电情况,除在出测前认真检查电池容量是否充足外,作业中观测人员不要远离接收机,听到仪器的低电报警要及时予以处理,否则可能会造成仪器内部数据的破坏或丢失。对观测时段较长的观测工作,建议尽量采用太阳能电池或汽车瓶进行供电。
⑦仪器高一定要按规定始、末各测一次,并及时输入及记入测量手薄之中。
⑧接收机在观测过程中不要靠近接收机使用对讲机;雷雨季节架设天线要防止雷击,雷雨过境时应关机停测,并卸下天线。
⑨观测站的全部预定作业项目,经检查均已按规定完成,且记录与资料完整无误后方可迁站。
⑩观测过程中要随时查看仪器内存或硬盘容量,每日观测结束后,应及时将数据转存至计算机硬、软盘上,确保观测数据不丢失。
4.观测记录
①观测记录
观测记录由GPS接收机自动进行,均记录在存储介质(如硬盘、硬卡或记忆卡等)上,其主要内容有:
●载波相位观测值及相应的观测历元;
●同一历元的测码伪距观测值;
●GPS卫星星历及卫星钟差参数;
●实时绝对定位结果;
●测站控制信息及接收机工作状态信息。
②测量手薄
测量手薄是在接收机启动前及观测过程中,由观测者随时填写的。其记录格式在现行《规范》和《规程》中略有差别,视具体工作内容选择。为便于使用,这里列出《规程》中城市与工程GPS网观测记录格式(见表8-11)供参考。
表8-11中,备注栏应记载观测过程中发生的重要问题,问题出现的时间及其处理方式等。
观测记录和测量手薄都是GPS精密定位的依据,必须认真、及时填写,坚决杜绝事后补记或追记。
外业观测中存储介质上的数据文件应及时拷贝一式两份,分别保存在专人保管的防水、防静电的资料箱内。存储介质的外面,适当处应贴制标签,注明文件名、网区名、点名、时段名、采集日期、测量手薄编号等。
接收机内存数据文件在转录到外存介质上时,不得进行任何剔除或删改,不得调用任何对数据实施重新加工组合的操作指令。
8.4 GPS测量的作业模式
8.4.1 经典静态定位模式
1.作业方式采用两台(或两台以上)接收
设备,分别安置在一条或数条基线的两个端点,
同步观测4颗以上卫星,每时段长45分钟至2个
小时或更多。作业布置如图8-10所示。
2.精度基线的相对定位精度可达
5mm+1ppm2D,D为基线长度(KM)。
3.适用范围建立全球性或国家级大地控
制网,建立地壳运动监测网、建立长距离检校基
线、进行岛屿与大陆联测、钻井定位及精密工程
控制网建立等。
4.注意事项所有已观测基线应组成一系
列封闭图形(如图8-10),以利于外业检核,提高成果可靠度。并且可以通过平差,有助于进一步提高定位精度。
8.4.2 快速静态定位
1.作业方法在测区中部选择一个基准站,
并安置一台接收设备连续跟踪所有可见卫星;另一
台接收机依次到各点流动设站,每点观测数分钟。
作业布置如图8-11所示。
2.精度流动站相对于基准站的基线中误差
为5mm±1ppm2D。
3.应用范围控制网的建立及其加密、工程
测量、地籍测量、大批相距百米左右的点位定位。
4.注意事项在测量时段内应确保有5颗以上卫星可供观测;流动点与基准点相距应不超过20km;流动站上的接收机在转移时,不必保持对所测卫星连续跟踪,可关闭电源以降低能耗。
5.优缺点
优点:作业速度快、精度高、能耗低;缺点:二台接收机工作时,构不成闭合图形(如图8-11),可靠性差。
8.4.3 准动态定位
1.作业方法在测区选择一个基准点,
安置接收机工连续跟踪所有可见卫星;将另一
台流动接收机先置于1号站(如图8-12)观测;
在保持对所测卫星连续跟踪而不失锁的情况下,
将流动接收机分别在2,3,4……各点观测数秒
钟。
2.精度基线的中误差约为1~2cm。
3.应用范围开阔地区的加密控制测量、
工程测量及碎部测量及线路测量等。
1.注意事项应确保在观测时断上有5
颗以上卫星可供观测;流动点与基准点距离不超过20 km;观测过程中
流动接收机不能失锁,否则应在失锁的流动点上延长观测时间1~2min。
8.4.4 往返式重复设站
1.作业方法建立一个基准点安置接收机连
续跟踪所有可见卫星;流动接收机依次到每点观测
1~2min;1h后逆序返测各流动点1~2min。设站
布置如图8-13所示。
2.精度相对于基准点的基线中误差为
5mm+1ppm.D。
3.应用范围控制测量及控制网加密、取代导线测量及三角测量、工程测量机地籍测量。
4.注意事项流动点与基准点距离不超过15km;基准点上空开阔,能正常跟踪3颗及以上卫星。
8.4.5 动态定位
1.作业方法建立一个基准点安置接收机连续
跟踪所有可见卫星;流动接收机先在出发点上静态
观测数分钟;然后流动接收机从出发点开始连续运
动;按指定的时间间隔自动运动载体的实时位置。
作业布置如图8-14所示
2.精度相对于基准点的瞬时点位精度
1~2cm。
3.应用范围精密测定运动目标的轨迹、测定
道路的中心线、剖面测量、航道测量等。
4.注意事项需同步观测5颗卫星,其中至少4颗卫星要连续跟踪;流动点与基准点距离不超过20 km。
8.4.6 实时动态测量的作业模式与应用
1.实时动态(RTK)定位技术简介
实时动态(Real Time Kinematic-RTB)测量技术,是以载波相位观测量为根据的实时差分GPS(RTD GPS)测量技术,它是GPS测量技术发展中的一个新突破。
实时动态测量的基本思想是:在基线上安置一台GPS接收机,对所有可见GPS卫星进行连续地测量,并将其观测数据,通过无线电传输设备,实时地发送给用户观测站。在用户站上,GPS接收机在接收GPS卫星信号的同时,通过无线电接收设备,接收基准站传输的观测数据,然后根据相对定位的原理,实时地计算并显示用户站的三维坐标及其精度。
2.RTK作业模式与应用
根据用户的要求,目前实时动态测量采用的作业模式,主要有:
①快速静态测量
采用这种测量模式,要求GPS接收机在每一用户站上,静止地进行观测。在观测过程中,连同接收到的基准站的同步观测数据,实时地解算整周末知数和用户站的三维坐标。如果解算结果的变化趋于稳定,且其精度已满足设计要求,便可适时的结束观测。
采用这种模式作业时,用户站的接收机在流动过程中,可以不必保持对GPS 卫星的连续跟踪,其定位精度可达1~2cm。这种方法可应用于城市、矿山等区域性的控制测量,工程测量和地籍测量等。
②准动态测量
同一般的准动测量一样,这种测量模式,通常要求流动的接收机在观测工作开始之前,首先在某一起始点上静止地进行观测,以便采用快速解算整周未知数的方法实时地进行初始化工作。初始化后,流动的接收杨在每一观测站,只需静止观测数历元,并连同基准站的同步观测数据,实时地解算流动站的三维坐标。目前,其定位的精度可达厘米级。
该方法要求接收机在观测过程中,保持对所测卫星的连续跟踪。一旦发生失锁,便需重新进行初始化的工作。
准动态实时测量模式,通常主要应用于地籍测量、碎部测量、路线测量和工程放样等。
③动态测量
动态测量模式,一般需首先在某一起始点上,静止地观测数分钟,以便进行初始化工作。之后,运动的接收机按预定的采样时间间隔自动地进行观测,并连同基准站的同步观测数据,实时的确定采样点的空间位置。目前,其定位的精度可达厘米级。
这种测量模式,仍要求在观测过程中,保持对观测卫星的连续跟踪。一旦发生失锁,则需重新进行初始化的工作。这时,对陆上的运动目标来说,可以在卫星失锁的观测点上,静止地观测数分钟,以便重新初始化,或者利用动态初始化(AROF)技术,重新初始化,而对海上和空中的运动目标来说,则只有应用AROP 技术,重新完成初始化的工作。
实时动态测量模式,主要应用于航空摄影测量和航空物探中采样点的实时定位,航空测量,道路中线测量,以及运动目标的精度导航等。
思考题:1、怎样编写GPS测量技术设计书?
2、为什么要进行GPS网的基准设计?其目的是什么?
3、进行GPS网形设计主要考虑哪些因素?
4、GPS测量外业观测在一个测点上要进行哪些工作?工作流程是怎样的?要注意什么?
8.5 数据预处理及观测成果的质量检核
8.5.1 数据预处理
1.数据处理软件及选择
GPS网数据处理分基线解算和网平差两个阶段。各阶段数据处理软件可采用随机软件或经正式鉴定的软件,对于高精度的GPS网成果处理也可选用国际著名的GAMIT/GLOBK、BERNESE、GIPSY、GFZ等软件。
2.基线解算
对于两台级以上接收机同步观测值进行独立基线向量(坐标差)的平差计算叫基线解算。它的基本内容是:
①数据传输;
②数据分流;
③统一数据文件格式;
④卫星轨道的标准化;
⑤探测周跳、修复载波相位观测值;
⑥对观测值进行必要改正。
基线向量的解算一般采用多站、多时段自动处理的方法进行,具体处理中应注意以下几个问题:
①基线解算一般采用双差相位观测值,基线大于30Km,可采用三差相位观测值。
②卫星广播星历坐标值,可作基线解的起算数据。
③基线解算中所需的起算点坐标,应按以下优先顺序采用:
●国家GPS A、B级网控制点或其他高等级GPS网控制点的已有WGS-84
系坐标。
●国家或城市较高等级控制点转换到WGS-84系后的坐标系。
●不少于观测30min的单点定位结果的平差值提供的WGS-84系坐标。
④在采用多台接收机同步观测的一个同步时段中,可采用单基线模式解算。
⑤同一级别的GPS网,根据基线长度不同,可采用不同的数据处理模型。
⑥对于所有同步观测时间短于30min的快速定位基线,必须采用合格的双差固定解作为基线解算的最终结果。
8.5.2 观测成果的外业检核
1.每个时段同步观测数据的检核
①数据剔除率应小于10%;
②采用单基线处理模式时,对于采用同一种数学模型的基线解,其同步时段众人一的三遍同步环的坐标分量相对闭合差和全长相对闭合差不得超过表8-12所列限差。
表8-12 同步坐标分量及环线全长相对闭合差限差(ppm )
2.重复观测边的检核
对于重复观测边的任意两个时段的成果互差,均应小于相应等级规定精度的
22倍。
3.同步观测环检核
一般规定,三边同步环中第三边处理结果与前两边的代数和之差应小于下列数值:
122
22
5
55
3()
(89)
5
x y z x y z ωωωωωωωσ≤≤
≤
=++≤-
对于四站以上的多边同步环,所有的分量闭合差不应大于
,5
σn
)
108(5
3)
(2
1
22
2-≤
++=σωωωωωn
z y x =而环闭合差:
4.异步观测环检核
各独立环的坐标分量闭合差及全长相对闭合差应符合下式:
实验报告GPS静态测量
实验四GPS静态测量 一、实验目的 实验的目的是使学生了解采用GPS定位技术建立工程控制网的过程,使所学理论知识与实践相结合,巩固和加深对新知识的理解,增强学生的动手能力,培养学生解决问题、分析问题的能力。通过学习,应达到如下要求: 1、熟练掌握GPS接收机的使用方法,外业观测的记录要求。选点、埋石的要求。 2、合理分配时段、掌握星历预报对时段的要求。PDOP值的大小对观测精度的影响,图形结构的设计及外业工作。外业观测时手机或对讲机的合理应用。 3、掌握GPS控制测量数据处理处理的流程,能独立完成基线解算及网平差 二、实验地点: 城市学院校区内,实验学时:4小时 三、实验前的准备工作 1、实验内容介绍:对实验的任务和意义作好充分了解。 2、使用的仪器及物品:GPS接收机(含电池)、基座、脚架若干台,作业调度表,外业观测手簿,小钢尺,铅笔,安装有传输软件和数据处理软件的计算机,数据传输线若干根,便携式存储器。 3、搜集资料 ①广泛收集测区及其附近已有的控制测量成果和地形图资料 a.控制测量资料包括成果表、点之记、展点图、路线图、计算说明和技术总结等。收集资料时要查明施测年代、作业单位、依据规范、坐标系统和高程基准、施测等级和成果的精度评定。 b.收集的地形图资料包括测区范围内及周边地区各种比例尺地形图和专业用图,主要查明地图的比例尺、施测年代、作业单位、依据规范、坐标系统、高程系统和成图质量等。 c.如果收集到的控制资料的坐标系统、高程系统不一致,则应收集、整理这些不同系统间的换算关系。 (注:本实验采用地科系2013年5月建立的校园控制网资料) ②收集有关GPS测量定位的技术要求 通过参考测量规范,收集有关的测量技术要求。GPS测量规范包括: a.《全球定位系统GPS测量规范》GB/T 18314-2009 b.《工程测量规范》 GB 50026-2007
GPS静态控制测量外业操作指南60743
GPS控制测量外业作业要求及技术指南 一:外业观测作业人员操作内容 安置接收机天线(严格对中整平、定向、量取仪器高)、设置接收机中的参数(如观测模式、截止高度角、和采样间隔等;如不设参数,接收机一般就采用缺省值),以及开机、关机等工作,其他工作由接收机自动完成。 二:操作流程:【选点与埋石——GPS接收机的检查——观测方案设计——观测作业——外业观测成果质量检核】 1.选点准备: 根据收集的测区内及周边现有平面和高程控制点以及测区地形图等,依据项目任务书或合同书以及相关规范的要求在图上进行设计,标绘处计划设站的区域。 1.1选点的基本要求 基本要符合规范(全球定位系统GPS测量规范GB/T18314-2009)的相关要求: A)测站四周视野开阔,高度角15°以上不允许存在成片的障碍物 B)远离大功率无线电发射源,以免损坏接收机天线,高压
电线50米至少,大功率无线发射源至少200米。
C)测站远离房屋、围墙、广告牌、山坡及大面积平静水面(湖泊、池塘)等信号反射物,以免出现严重的多路径 效应。 D)点位应位于地质条件良好、点位稳定、易于保护的地方,并尽可能顾及交通条件。 1.2选点作业 A)测量人员应按照在图上选择的初步位置以及对点位的基本要求,在实地最终选定点位,并做好相应的标记。 B)利用旧点时,应对旧点的稳定性、可靠性和完好性进行检查,符合要求时方可利用。 C)点名以该点位所在地命名,无法区分时,可在点名后加注(一)、(二)。 D)新旧点重合时,应沿用旧点名,一般不应更改。 E)选点工作完成后,应按规范要求的形式绘制GPS网选点图,可以用相机或手机拍照片。 提交的资料:①点之记②GPS网选点图 1.3 埋石 C、D、E及GPS点在满足标石稳定、易于长期保存的前提下, 均可根据具体情况选用。 提交的资料:标石建造的照片
GPS静态控制测量方案
兰州市水源地建设工程项目(第11-1标段) GPS静态测量方案 编制: 审核: 审批: 中国建筑第六工程局有限公司 兰州市水源地建设工程项目(第11-1标段)项目部 2015年12月
目录 3 1.工程概况............................................................................................................. 4 2.编制依据............................................................................................................. 3.适用范围............................................................................................................. 4 4.测量人员的组成及仪器设备 (5) 5 5.平面控制测量..................................................................................................... 7 6.高程控制测量..................................................................................................... 7 7.测量资料管理及上报......................................................................................... 7 8.质量保证措施..................................................................................................... 9.总结..................................................................................................................... 8 8 10.附录...................................................................................................................
最新南方GPS静态测量及数据处理(实例)上课讲义
南方测绘石家庄GNSS产品蔡高峰 GPS静态测量,是利用测量型GPS接收机进行定位测量的一种。主要用于建立各种级别的控制网。进行GPS静态测量时,认为GPS接收机的天线在整个观测过程中的位置是静止,在数据处理时,将接收机天线的位置作为一个不随时间的改变而改变的量,通过接收到的卫星数据的变化来求得待定点的坐标。在测量中,GPS静态测量的具体观测模式是多台(3台以上)接收机在不同的测站上进行静止同步观测,时间由40分钟到十几小时不等。 使用GPS进行静态测量前,先要进行点位的选择,其基本要求有以下几点: 1、周围应便于安置接收设备和操作,视野开阔,市场内障碍物的高度角不宜超过15度; 2、远离大功率无线电发射源(如电视台、电台、微波站等),其距离不小于200米;远离高压输电线和微波无线电信号传送通道,其距离不小于50米; 3、附近不应有强烈反射卫星信号的物件(如大型建筑物、大面积水域等); 4、地面基础稳定,易于点的保存; 5、充分利用符合要求的旧有控制点。 GPS点位选好后,就可以架站进行静态数据采集了。在采集静态数据时,一定要对中整平,在采集的过程中需要做好记录,包括每台GPS各自所对应的点位、不同时间段的静态数据对应的点位、采集静态数据时GPS的天线高(S86量测高片高,S82量斜高)。 用GPS采集完静态数据后,就要对所采集的静态数据进行处理,得出各个点的坐标。下面以为临城建设局做的GPS静态测量为例,介绍静态数据处理的过程。 打开GPS数据处理软件,在文件里面要先新建一个项目,需要填写项目名称、施工单位、负责人,并设置坐标系统和控制网等级,基线的剔除方式。在这里由于利用的旧有控制点所属的坐标系统是1954北京坐标系3度带,因此坐标系统设置成1954北京坐标系3度带。控制网等级设置为E级,基线剔除方式选着自动。 在数据录入里面增加观测数据文件,若有已解算好的基线文件,则可以选择导入基线解算数据。增加观测数据文件后,会在王图显示窗口中显示网图,还需要在观测数据文件中修改量取的天线高和量取方式(S86选择测高片,S82选择天线斜高)。
GPS实例静态测量及数据处理
GPS实例静态测量及数据处理 主要论述GPS基本原理及静态测量应用。 标签:GPS静态 0 引言 随着我国经济的繁荣;促进了交通事业的发展;公路建设速度和规模也迅猛提高;通车里程及干线公路比重也在逐年加大。虽然近几年公路建设的标准和质量在提高;但不可否认的是测绘水平还比较落后。主要表现在测绘方式单一;不能根据道路的不同环境选择合理的测绘方法。此外;测绘技术含量不高;测绘效率低下;不能满足大规模测绘工作的需要;而且测绘方法通常不被重视;忽视长期的、可持续发展的社会效益。因此;提高道路测绘管理水平;采取科学有效的方法对道路进行及时测绘;为经济发展提供安全、舒适、畅通的公路基础设施;就显得迫在眉睫。 近年来;全球定位系统(Global Positioning System-GPS)作为新一代的卫星导航定位系统;经过二十多年的发展;已发展成为一种被广泛采用的系统;它的应用领域和应用前景已远远超出了该系统设计者当初的设想;目前;它在航空、航天、军事、交通、运输、资源勘探、通信、气象等几乎所有领域中;都被作为一项非常重要的技术手段和方法;用来进行导航、定时、定位、地球物理参数测定和大气物理参数测定等。特别在交通和地形测量方面尤为突出。 GPS地区虽然开始应用;但在很多技术环节方面还很不成熟;处在摸索阶段。本文将结合我地区实际;通过试验和研究应用全面系统地GPS测量基层技术;主要研究内容包括以下几个方面: GPS定位原理; GPS静态定位在测量中的应用; 布设GPS网; GPS静态的内业处理; GPS注意事项; GPS营口地区点的分布。 1 GPS定位原理 GPS(Global Positioning System)主要根据空中卫星发射的信号;确定空间
静态GPS控制测量使用技术方法
静态GPS控制测量使用技术方法 1控制点的布设 为了达到GPS测量高精度、高效益的目的,减少不必要的耗费,在测量中遵循这样的原则:在保证质量的前提下,尽可能地提高效率、降低成本。所以对GPS测量各阶段的工作,都要精心设计,精心组织和实施。建议用户在测量实施前,对整个GPS测量工作进行合理的总体设计。 总体设计,是指对GPS网进行优化设计,主要是:确定精度指标,网的图形设计,网中基线边长度的确定及网的基准设计。在设计中用户可以参照有关规范灵活地处理,下面将结合国内现有的一些资料对GPS测量的总体设计简单地介绍一下。 1、确定精度标准 在GPS网总体设计中,精度指标是比较重要的参数,它的数值将直接影响GPS网的布设方案、观测数据的处理以及作业的时间和经费。在实际设计工作中,用户可根据所作控制的实际需要和可能,合理地制定。既不能制定过低而影响网的精度,也不必要盲目追求过高的精度造成不必要的支出。 2、选点 选点即观测站位置的选择。在GPS测量中并不要求观测站之间相互通视,网的图形选择也比较灵活,因此选点比经典控制测量简便得多。但为了保证观测工作的顺利进行和可靠地保持测量结果,用户注意使观测站位置具有以下的条件: ①确保GPS接收机上方的天空开阔GPS测量主要利用接收机所接收到的卫星信号,而且接收机上空越开阔,则观测到的卫星数目越多。一般应该保证接收机所在平面15°以上的范围内没有建筑物或者大树的遮挡。 图5-1 高度截止角 ②周围没有反射面,如大面积的水域,或对电磁波反射(或吸收)强烈的物体(如玻璃墙,树木等),不致引起多路径效应。 ③远离强电磁场的干扰。 GPS接收机接收卫星广播的微波信号,微波信号都会受到电磁场的影响而产生噪声,降低信噪比,影响观测成果。所以GPS控制点最好离开高压线、微波站或者产生强电磁干扰的场所。邻近不应有强电磁辐射源,如无线电台、电视发射天线、高压输电线等,以免干扰GPS 卫星信号。通常,在测站周围约 200m 的范围内不能有大功率无线电发射源(如电视台、电台、微波站等);在 50m 内不能有高压输电线和微波无线电信号传递通道。 ④观测站最好选在交通便利的地方以利于其它测量手段联测和扩展; ⑤地面基础稳固,易于点的保存。
gps静态测量数据处理
gps静态测量数据处理 一、基线解算的类型 1、单基线解 (1)定义:当有台GPS接收机进行了一个时段的同步观测后,每两台接收机之间就可以形成一条基线向量,共有条同步观测基线,其中最多可以选出相互独立的条同步观测基线,至于这条独立基线如何选取,只要保证所选的条独立基线不构成闭和环就可以了。这也是说,凡是构成了闭和环的同步基线是函数相关的,同步观测所获得的独立基线虽然不具有函数相关的特性,但它们却是误差相关的,实际上所有的同步观测基线间都是误差相关的。所谓单基线解算,就是在基线解算时不顾及同步观测基线间误差相关性,对每条基线单独进行解算。 (2)特点:单基线解算的算法简单,但由于其解算结果无法反映同步基线间的误差相关的特性,不利于后面的网平差处理,一般只用在普通等级GPS网的测设中。 2、多基线解 (1)定义:与单基线解算不同的是,多基线解算顾及了同步观测基线间的误差相关性,在基线解算时对所有同步观测的独立基线一并解算。 (2)特点:多基线解由于在基线解算时顾及了同步观测基线间的误差相关特性,因此,在理论上是严密的。 (3)多站整体解(绝对坐标) (4)单基线解算的过程
(5)利用基线解算软件解算基线向量的过程 二、基线解算结果的质量评定指标 1、单位权方差因子
(1)定义: (2)实质:反映观测值的质量,又称为参考方差因子。越小越好。 2、RMS - 均方根误差 (1)定义: (2)实质:表明了观测值的质量,观测值质量越好,越小,反之,观测值质量越差,则越大,它不受观测条件(观测期间卫星分布图形)的好坏的影响。 3、数据删除率 (1)定义:在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,则需要将其删除。被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。 (2)实质:数据删除率从某一方面反映出了GPS原始观测值的质量。数据删除率越高,说明观测值的质量越差。 4、RATIO (1)定义:RATIO值为在采用搜索算法确定整周未知数参数的整数值时,产生次最小的单位权方差与最小的单位权方差的比值。
GPS静态控制测量网平差报告
FJ -3 工程测量技术交流群18874248 省道S 229南坑至源头段 二级公路改建工程 GPS 静态控制测量 网平差报告 萍 乡 公 路 勘 察 设 计 院 二○一一年九月 目 录 一、 GPS 控制点成果表…………………………………………1 二、 GPS 控制点网示意图………………………………………1 三、 GPS 控制网平差报告……………………………………1~4
一、G PS控制点成果表 二、GPS控制点网示意图 三、GPS控制网平差报告 1 坐标系统 1.1 坐标系统名称 Beijing54 1.2 基准参数
1.3 投影参数 M0 =1.00000000 投影比率 H = 0.0000 投影高 Bm =0投影面的平均纬度 B0 =0:00:00.00N 原点纬度 L0 =113:50:00.00E 中央子午线 N0 =0.0000 北向加常数 E0 =500000.0000 东向加常数 回到顶部 2 三维无约束平差2.1 平差参数 2.2 基线向量及改正数 2.3 τ(Tau)检验表 2.4 τ(Tau)检验直方图
2.5 自由网平差坐标 回到顶部 3 二维约束平差 3.1 平差参数 3.2 平面距离平差值 3.3 平面坐标 ***** 回到顶部
4 高程拟合 4.1 平差参数 4.2 高程拟合坐标 240.7246 回到顶部 5 基线闭合差 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G2->G3.242A 99.9 0.0062 -2063.4456 -1777.5444 1294.6074 3015.5398 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.76ppm EX = 0.0043 EY = -0.0043 EZ = -0.0026 8706.0493 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->G4.242B 99.9 0.0072 -4060.9524 -3093.9755 2049.7944 5501.4248 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.48ppm EX = -0.0041 EY = 0.0051 EZ = 0.0010 13683.0814 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->GD1.242X 99.9 0.0065 1554.7134 -896.8104 2732.5118 3269.2543 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.80ppm EX = -0.0048 EY = 0.0042 EZ = 0.0017 8261.4927 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->G4.242B 99.9 0.0063 -1997.5067 -1316.4322 755.1870 2508.6519 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.12ppm EX = -0.0003 EY = 0.0004 EZ = 0.0015 13695.9047 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->GD1.242X 99.9 0.0071 3618.1569 880.7382 1437.9069 3991.7835 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.42ppm EX = 0.0026 EY = -0.0040 EZ = -0.0015 11989.6182 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G4->GD1.242X 99.9 0.0073 5615.6650 2197.1667 682.7190 6068.7182 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.16ppm EX = 0.0015 EY = -0.0007 EZ = -0.0022 16557.6999
gps静态测量技术总结
gps静态测量技术总结 各位读友大家好,此文档由网络收集而来,欢迎您下载,谢谢 《gps静态测量技术总结》是一篇好的范文,好的范文应该跟大家分享,这里给大家转摘到XX。篇一:GPS静态测量与数字化测图技术总结 GPS静态测量与数字化测图技术总结 班级:测绘12-2班学号:31218082**姓名:* * 2015年7月8日 GPS静态数据处理技术总结 一、测区概述 雁山区位于桂林市南部,全境多石山和丘陵。本次实习测区主要范围为桂林理工大学雁山校区与广西师范大学雁山校区周边,整个测区大致位于东经110°16’06”- 110°18’58”,北纬25°03’05”- 25°07’35”之间。测区范围内山区
较多,道路复杂,房屋众多,植被虽然较茂密,但是平坦空地也不少,布点位置相对地域开阔,便于进行GPS观测。 二、技术依据 1、《GPS与数字化测图实习指导书》; 2、《技术设计书》; 3、《全球定位系统城市测量技术规程》(CJJ 73-1997); 4、《全球定位系统(GPS)测量规范》(GB/T 18314-2001)。 三、坐标系的选择 GPS网的无约束平差平面坐标系统选用WGS-84坐标系,3°带高斯克吕格投影,中央子午线精度为111°,测区投影分带为6°带的第19带,3°带的第38带。四、起算数据如下表 五、仪器设备和软件 GPS控制测量采用南方GPS接收机和中海达GPS接收机,其静态相对定位精度为:静态基线±(5mm +1ppmD);高程±(10mm+2ppmD)。 这些GPS测量系统配备有星历预报软件、后处理解算软件,完全能满足GPS
控制测量数据处理的要求。 XX南方数据转换软件为南方GPS 后处理程序,基线结算及平差软件为中海达HGO数据处理软件,能够基线向量处理、GPS网平差软件、多种GPS数据格式转换等功能,完全能满足GPS控制测量数据处理的要求。 六、GPS静态测量方案GPS流程图: 开始 选点布网 数据采集 工具:数据传输软件(功能模块)结果:记录在接收机中的原始数据数据传输 工具:数据传输软件(功能传输模块) 结果:记录在计算机中 的原始数据 格式转换工具:格式转换软件(功能模块) 结果:标准格式数据
GPS静态测量数据处理
GPS静态测量数据处理 (2007-05-02 14:04:12) 转载▼ 标签: 分类:GPS专题 gps 数据后处理 静态 一、基线解算的类型 1、单基线解 (1)定义:当有台GPS接收机进行了一个时段的同步观测后,每两台接收机之间就可以形成一条基线向量,共有条同步观测基线,其中最多可以选出相互独立的条同步观测基线,至于这条独立基线如何选取,只要保证所选的条独立基线不构成闭和环就可以了。这也是说,凡是构成了闭和环的同步基线是函数相关的,同步观测所获得的独立基线虽然不具有函数相关的特性,但它们却是误差相关的,实际上所有的同步观测基线间都是误差相关的。所谓单基线解算,就是在基线解算时不顾及同步观测基线间误差相关性,对每条基线单独进行解算。 (2)特点:单基线解算的算法简单,但由于其解算结果无法反映同步基线间的误差相关的特性,不利于后面的网平差处理,一般只用在普通等级GPS网的测设中。 2、多基线解 (1)定义:与单基线解算不同的是,多基线解算顾及了同步观测基线间的误差相关性,在基线解算时对所有同步观测的独立基线一并解算。 (2)特点:多基线解由于在基线解算时顾及了同步观测基线间的误差相关特性,因此,在理论上是严密的。 (3)多站整体解(绝对坐标) (4)单基线解算的过程
(5)利用基线解算软件解算基线向量的过程 二、基线解算结果的质量评定指标 1、单位权方差因子 (1)定义:
(2)实质:反映观测值的质量,又称为参考方差因子。越小越好。 2、RMS - 均方根误差 (1)定义: (2)实质:表明了观测值的质量,观测值质量越好,越小,反之,观测值质量越差,则越大,它不受观测条件(观测期间卫星分布图形)的好坏的影响。 3、数据删除率 (1)定义:在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,则需要将其删除。被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。 (2)实质:数据删除率从某一方面反映出了GPS原始观测值的质量。数据删除率越高,说明观测值的质量越差。 4、RATIO (1)定义:RATIO值为在采用搜索算法确定整周未知数参数的整数值时,产生次最小的单位权方差与最小的单位权方差的比值。 (2)实质:反映了所确定出的整周未知数参数的可靠性,这一指标取决于多种因素,既与观测值的质量有关,也与观测条件的好坏有关。 5、RDOP (1)定义:所谓RDOP值指的是在基线解算时待定参数的协因数阵的迹的平方根,RDOP值的大小与基线位置和卫星在空间中的几何分布及运行轨迹(即观测条件)有关,当基线位置确定后,RDOP值就只与观测条件有关了,而观测条件又是时间的函数,因此,实际上对与某条基线向量来讲,其RDOP值的大小与观测时间段有关。 (2)实质:表明了GPS卫星的状态对相对定位的影响,即取决于观测条件的好坏,它不受观测值质量好坏的影响。 6、同步环闭合差 (1)定义:同步环闭合差是由同步观测基线所组成的闭合环的闭合差。 (2)实质:由于同步观测基线间具有一定的内在联系,从而使得同步环闭合差在理论上应总是为0的,如果同步环闭合差超限,则说明组成同步环的基线中至少存在一条基线向量是错误的,但反过来,如果同步环闭合差没有超限,还不能说明组成同步环的所有基线在质量上均合格。 (3)限值: ,
GPS工程测量及数据处理研究文献综述
本科毕业论文 文献综述 题目:GPS在工程测量中的应用及数据处理 姓名:赵建平学号2009303200901 专业:地理信息系统 指导教师:苗洁职称讲师 中国·武汉 二○一三年一月 分类号密级
华中农业大学本科毕业论文 文献综述 GPS在工程测量中的应用及数据处理GPS in Engineering Measurement and Data Processing 学生姓名:赵建平 学生学号:2009303200901 学生专业:地理信息系统 指导教师:苗洁讲师 华中农业大学资源与环境学院 二○一三年一月
Ⅰ目录 1.GPS和工程测量等相关概念2 1.1GPS相关概念2 1.1.1 GPS概念2 1.1.2 GPS技术2 1.1.3 GPS卫星测量原理3 1.1.4 GPS 测量的技术特点3 1.2 工程测量介绍4 2. GPS 在现代工程测量中的具体应用分析5 2.1实时动态(RTK>定位技术简介5 2.2 静态GPS在工程测量中的应用6 2.3 动态GPS在工程测量中的应用7 3.工程测量及数据处理7 3.1工程控制网数据处理方法7 3.2 GPS基线处理与质量控制8 3.2.1 GPS基线边的解算8 3.2.2 各种检核计算9 3.2.3 平差计算和成果分析9 4.分析与总结10 5.参考文献11 6.致谢11
GPS工程测量及数据处理研究 Ⅱ摘要:GPS测量技术具有测量时间短、技术含量高、精确度高等优点,在工程测量实践中发挥着越来越重要的作用。本文主要通过介绍GPS的系统组成、工作原理、技术特点等基本情况,系统总结了GPS技术在工程测量中的应用情况,及其在工程测量后的数据处理方法。 Ⅲ关键词:全球定位系统; GPS测量技术;工程测量;应用。静态测量;动态测量;数据处理 1.GPS和工程测量等相关概念 1.1GPS相关概念 1.1.1 GPS概念 GPS是英文Navigation SatelliteTiming And Ranging/Global PositioningSystem 卫星测时测距导航/全球定位系统)的简称,而其中文简称为“球位系”。GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。其主要目的是为陆、海、空三大领域提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,是美国独霸全球战略的重要组成。经过20余年的研究实验,耗资300亿美元,到1994年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。 1.1.2 GPS技术 GPS定位技术的高度自动化及其所达到的高精度和具有的潜力,也引起了广大测量工作者的极大兴趣。当时GPS定位基本上只有一个作业模式——静态相对定位,两台或若干台GPS接收机安置在待定点上,连续同步观测同一组卫星1-2h或更长一些时间,通过观测数据的后处理,给出各待定点间的基线向量,在采用广播星历的条件下,静态定位可取得5mm+1×10-6D<双频)或10mm+2×10-6D<单频)基线解精度。随着技术的发展,快速静态定位为短基线测量作业闯出了一条新路,大大提高了GPS测量的劳动生产率。一对GPS测量系统<双频)在10km以内的短边上,正常接收4-5颗卫星5min左右,即可获取5-10mm+1×10-6D的基
GPS静态测量概念
《GPS定位原理及应用》授课教案 第八章GPS测量的设计与实施 8.1 GPS测量的技术设计 教学内容:本节主要介绍GPS测量技术设计的一般要求和设计指标。 教学重点: 1.介绍GPS测量技术设计的依据; 2.介绍GPS测量的标准; 3.介绍GPS测量的图形设计。 教学难点:GPS的图形设计。 教学方法:课堂教学为主,充分利用多媒体教学方法。 教学要求: 学会局部性的GPS控制网的图形设计,掌握GPS测量技术设计书的编写。 8.1.1 GPS网技术设计的依据 1.GPS测量规范(规程) (1)《全球定位系统(GPS)测量规范》 (2)《全球定位系统城市测量技术规程》 (3)各行业部门的其他GPS测量规程或细则 2.测量任务书 8.1.2 GPS网的精度, 密度设计 1.GPS测量精度标准及分类 (1)GPS测量精度分类 对于各类GPS网的精度设计主要取决于网的用途。用于地壳形变及国家基本大地测量的GPS控制网可按表8-1分级。
用于城市或工程的GPS控制网可按表8-2分级。 (2)GPS测量的精度标准 GPS测量的精度标准通常用网中相邻点之间的距离中误差表示,其形式为: σ(8-1) 2) 2 (bd = a+ 式中:σ——距离中误差(毫米); ɑ——固定误差(mm); b——比例误差系数(ppm); d——相邻点之间的距离(km)。 实际生产中,应根据测区大小、GPS网的用途,来设计网的等级和精度标准。2.GPS点的密度标准 制定GPS网的密度标准,主要考虑任务要求和服务对象。密度可参照表8-3的规定执行。 8.1.3 GPS网的基准设计 1.基准设计的定义: 在GPS网的技术设计中,必须明确GPS网的成果所采用的 坐标系统和起算数据的工作,称为GPS网的基准设计。GPS网的基准包括位置基准、方位基准和尺度基准。 2.基准设计应考虑的几个问题: (1)应在地面坐标系中选定起算数据和联测原有地方控制点若干个,用以转换坐标。
GPS静态控制网数据处理步骤
GPS静态控制网数据处理步骤(华测X90F型) 首先检查电脑中是否已经安装了华测Compass数据处理软件和华测“数据处理”小软件,如没有,则应先安装。 数据传输: 一、数据连线:用数据线使GPS接收机圆形口连至电脑端串行口; 二、启动“数据下载”小软件(或启动华测Compass数据处理软件---工具---数 据传输),则出现数据传输(COM)界面; 三、GPS开机,则几秒钟后GPS机中的原始记录数据自动显示在右侧上部窗口 中,列表显示,开始时间、结束时间、文件大小、测站名、天线高、…;四、选择数据下载格式:瑄“工具”---“选项”----“GPS Compass 格式[.HCN]”— “确定”。 五、导出数据: 1.首先指定下载路径:在左边窗口中选择一个文件夹(应提前建立一个存 放数据的文件夹); 2.在右侧上部数据列表中,通过观察每行数据的记录、结束时间、文件大 小等,辨认其为欲下载的数据并选中,单击鼠标右键选“数据导出”,则 GPS机中被选中的数据被下载到刚才指定的文件夹中,并显示在右侧下 部窗口列表中,有下载时间; 3.关闭数据传输窗口。 基线处理(平差准备): 六、启动华测Compass数据处理软件,选“文件”----“新建项目”---指定数据 处理存放的文件夹,并选择坐标系,如:beijing54。---“创建”。 七、数据导入:选“文件”---“导入”---选“Compass格式的观测数据”---“确 定”----选已经下载到电脑上的原始数据(后缀HCN文件全选)---“打开” ---依次导入各台GPS机的下载数据(重复操作)。 所有导入的数据全部显示在右侧大窗口中,可以查看每个数据的文件名、点名(用仪器号码表示)、时段名称、起止观测时间(加上了8小时)。 八、输入测站点名、天线高:分别右键单击右侧窗口中每个观测数据----“属性” ---“通用”---“观测站”输入实际点名、点击“修改”输入天线高(输入量取的斜高值,“测量方法”也选“天线斜高”、“天线类型”选“X90内置天线”)---“确定”; (此时,选菜单中“检查”---自动搜索同步环、异步环、重复基线等并无结果显示);点击左侧窗口的基线向量,右侧大窗口的基线数据显示“未知”。 九、基线处理:选“静态基线”---“基线处理设置”(无必要时可不修改设置) ---“处理全部基线”---“退出”。 这时,点击左侧窗口的基线向量,右侧大窗口的基线数据显示“整数解”、“Ratio”、“误差”、X、Y、Z等,处理结果Ratio值必须大于3,越大越好,一般达到99,“误差”值越小越好,最后2厘米以下。否则,单独处理这条基线,方法:选中欲处理的基线,右键单击---“属性”---查看“基线残差图” ---在“观测数据图”中删除信号差的卫星信号---“确定”---再选中该基线右键单击---“单独处理这条基线”---观察Ratio是都、否大于3和误差值是否很小,否则重复单独处理过程。 网平差:
GPS做静态测量
G P S做静态测量 静态差分GPS(Static differential GPS)是由两个(含)以上接收仪,进行较长时间(通常为半小时以上)的测量,其包含了一组接收仪间的决定。 伪距差分原理 伪距差分是目前用途最广的一种技术。几乎所有的商用差分GPS均采用这种技术。国际海事委员会推荐的RTCM SC-104也采用了这种技术。 在基准站上的接收机要求得它至可见卫星的距离,并将此计算出的距离与含有误差的测量值加以比较。利用一个α-β将此差值滤波并求出其偏差。然后将所有卫星的测距误差传输给用户,用户利用此测距误差来改正测量的伪距。最后,用户利用改正后的伪距来解出本身的位置,就可消去公共误差,提高。 随着GPS技术的进步和接收机的迅速发展,GPS在测量定位领域已得到了较为广泛的应用。但是,针对不同的领域和用户的不同要求,需要采用的具体是不一样的。一般来说,GPS测量模式可分为静态测量和动态测量两种模式,而静态测量模式又分常规静态测量模式和快速静态测量模式,动态测量模式分准动态测量模式(后处理动态,走走停停)和测量模式,实时动态测量模式分DGPS和RTK 方式。下面分别介绍如下: 1、常规静态测量 这种模式采用两台(或两台以上)GPS接收机,分别安置在一条或数条基线的两端,同步观测4颗以上卫星,每时段根据基线长度和测量等级观测45分钟以上的时间。这种模式一般可以达到5mm十1ppm的。常规静态测量常用于建立全球性或国家级大地,建立监测网、建立长距离检校基线、进行岛屿与大陆联测、定位及精密工程控制网建立等。 2、快速静态测量 这种模式是在一个已知测站上安置一台GPS接收机作为基准站,连续跟踪所有可见卫星。接收机依次到各待测测站,每测站观测数分钟。这种模式常用于控制网的建立及其加密、、等。需要注意的是这种方法要求在观测时段内确保有5颗以上卫星可供观测;流动点与相距应不超过20km。 3、准动态测量 这种模式是在一个已知测站上安置一台GPS接收机作为基准站,连续跟踪所有可见卫星。移动站接收机在进行初始化后依次到各待测测站,每测站观测几个数据。这种方法不同于快速静态,除了观测时间不一样外,它要求移动站在搬站过程中不能失锁,并且需要先在已知点或用其它方式进行初始化(采用有OTF 功能的软件处理时例外)。
GPS静态测量原理 测量111 李博周
辽宁林业职业技术学院 林学系 辽宁林业职业技术学院 毕业设计 学院辽宁林业职业技术学院 所属系部林学系 专业名称工程测量技术 学制 3年 年级 2011级 姓名李博周 指导教师王旭
GPS 静态测量原理 摘要 GPS定位的基本原理是以GPS卫星至用户接收机天线之间的距离(或距离差)为观测量,根据已知的卫星瞬时坐标,利用空间距离后方交会,确定用户接收机天线所对应的观测站的位置。GPS静态定位指接收机在定位过程中位置静止不动,包含绝对定位和相对定位两种方式。无论是静态绝对定位还是静态相对定位,所依据的观测量都是卫星到观测站的伪距,根据观测量的不同,静态定位又可分为测码伪距静态定位和测相伪距静态定位。基于载波相位测量的静态相对定位,是目前精度最高的一种方式。 关键词:GPS、后方交会、静态定位、伪距、精度
目录 GPS简介 (1) 1 静态定位概述 (2) 2 静态绝对定位原理 (3) 2.1 伪距观测方程的线性化 (3) 2.2 伪距法绝对定位的解算 (3) 2.3 用载波相位观测值进行静态绝对定位 (4) 3 静态相对定位原理 (5) 3.1观测量的线性组合 (5) 3.2观测方程的线性化及平差模型 (5) 4 整周未知数的确定方法 (7) 4.1经典静态相对定位法确定整周未知数 (7) 4.2 交换天线法确定整周未知数 (8) 4.3 P码双频技术确定整周未知数 (8) 5 周跳分析 (10) 5.1利用单差观测值的高次差探测与修复周跳 (10) 5.2利用双差观测值的高次差探测与修复周跳 (10) 5.3利用平差后的残差探测与修复周跳 (11) 致谢 (12) 参考文献 (13)
GPS静态控制测量报告
大戛高速公路项目(第四工段) 导线复测总结报告 编制: 审核: 审批: 建投大戛高速公路第四工段项目部 2016年8月 S. . . . .
目录 1.工程概况 (3) 2.编制依据 (4) 3.适用围 (5) 4.测量人员的组成及仪器设备 (5) 5.平面控制测量 (5) 6.高程控制测量 (7) 7.测量资料管理及上报 (7) 8.质量保证措施 (8) 9.总结 (8) 10.附录 (9) S. . . . .
1.工程概况 1.1工程概况 大戛高速公路四工段位于省市新平县,工段起于三工段K33+528路基段,经红星村等村落,止于五工段K44+555莫洛黑隧道进口。主线起讫里程为K33+528~K44+555,设计路线全长11.027KM。 四工段主要工程为桥梁7座、隧道5座、路基4.013KM; 桥梁工程有: 扒拉黑箐1#桥(桥长640米) 扒拉黑箐2#桥(桥长283.5米) 大黑箐大桥(桥长480米) 斗迭社莫大桥(桥长720米) 六十二大箐大桥(桥长374米) 红星大桥(桥长150米) 莫洛黑大桥(桥长794米) 隧道工程: 哈玛珠隧道(隧长616米) 迭社莫隧道(隧长202米) 红星1#隧道(隧长648米) S. . . . .
红星2#隧道(隧长1098米) 白尺达隧道(隧长1008米) 路基工程:4013.5米 1.2复测工作容 对大戛高速公路四工段设计单位提供的导线控制点进行复测。 大戛高速公路四段原设计控制点表(附表) 2.编制依据 2.1《工程测量规》(GB 50026-2007); 2.2《全球定位系统(GPS)测量规》(GB/T18314-2009); S. . . . .