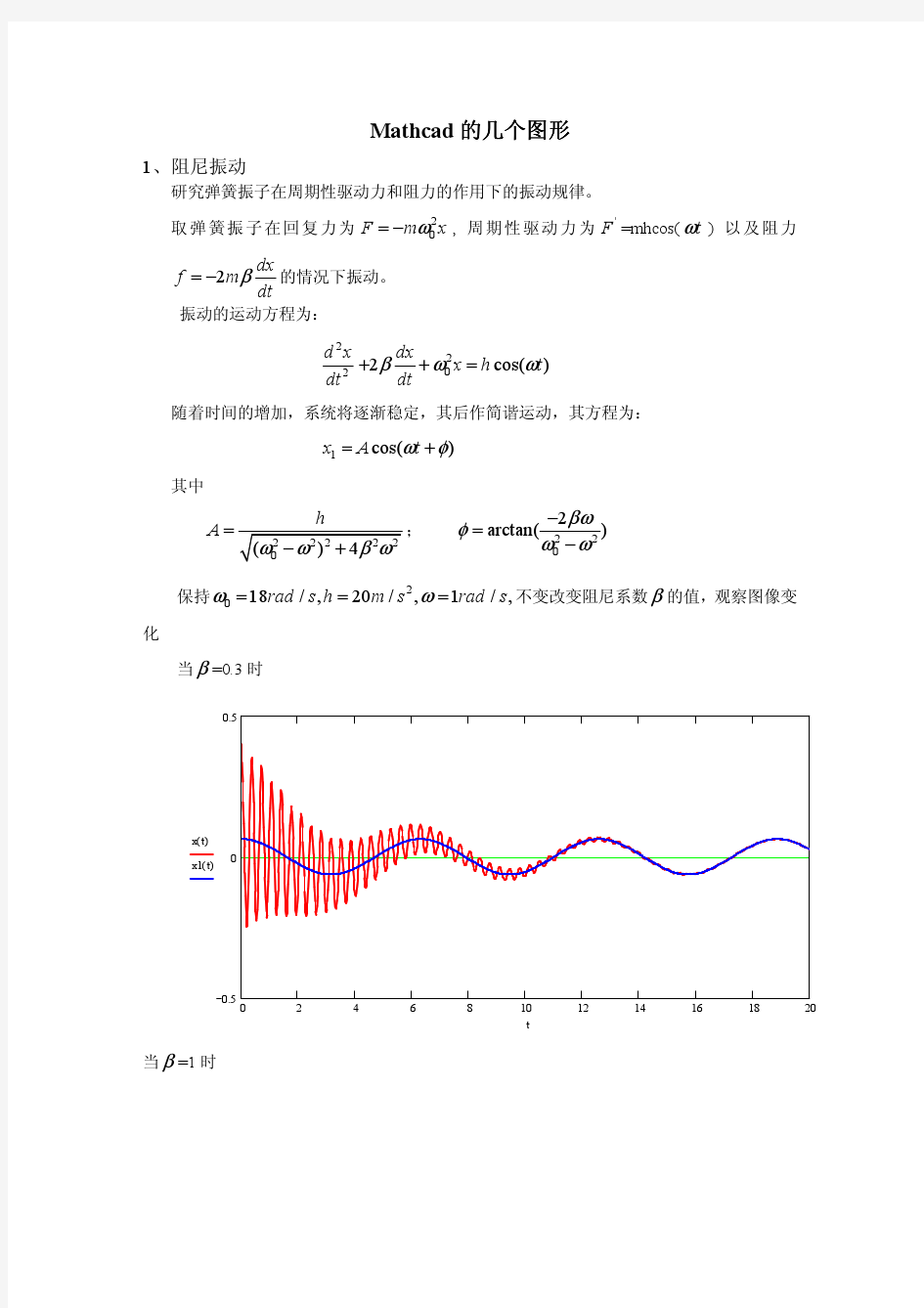
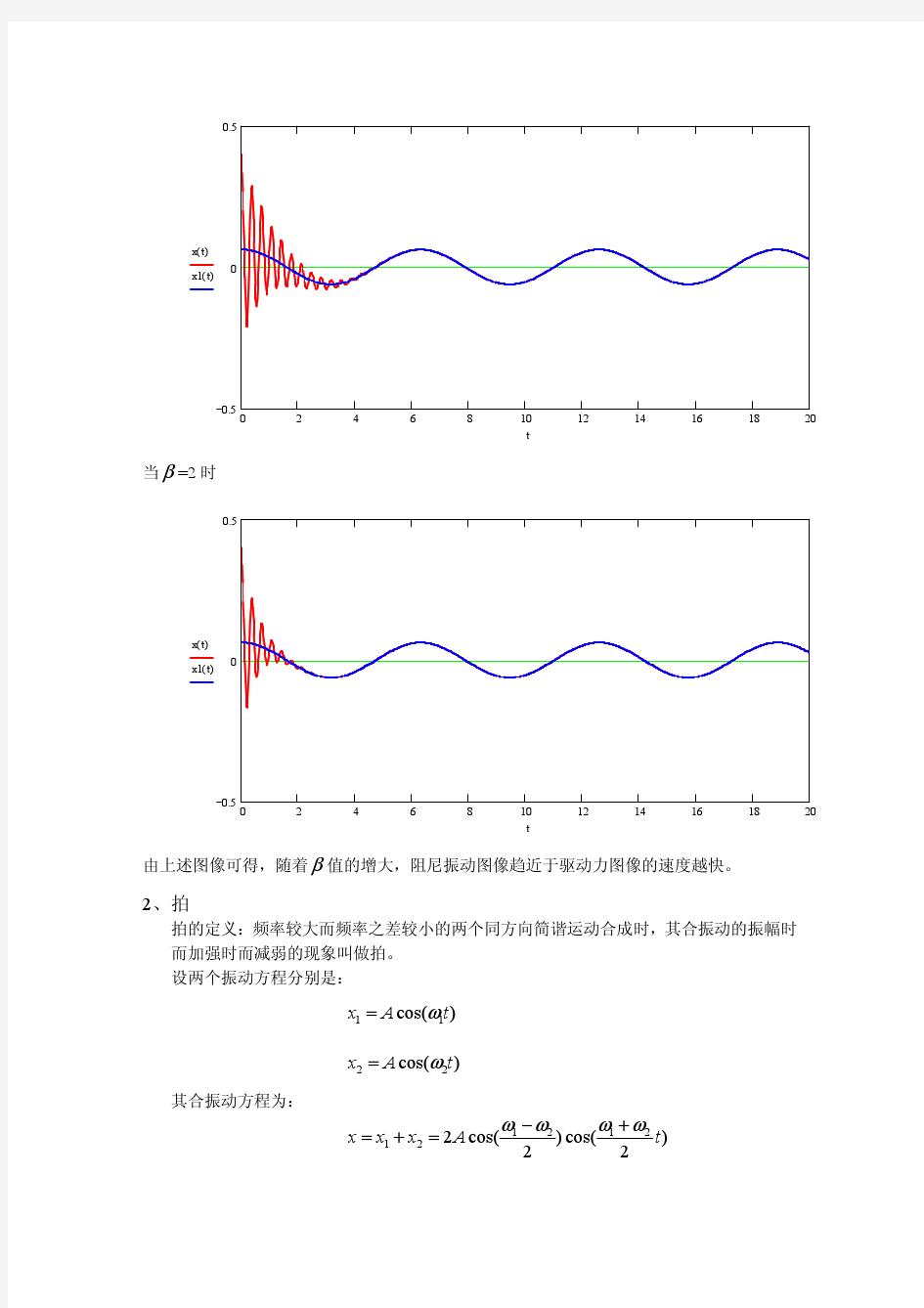
电子科大大学物理mathcad的几个图形
模式识别的研究现状与发展趋势
模式识别的研究现状与发展趋势 摘要:随着现今社会信息技术的飞速发展, 人工智能的应用越来越广泛, 其中模式识别是人工智能应用的一个方面。而且现今的模式识别的应用也越来越得到大家的重视与支持,在各方面也有重大的进步。模式识别也成为人们身边不可或缺的一部分。关键词:人工智能,技术,模式识别,前景 Abstract:In the modern society with the rapid development of information technology, the application of a rtificial intelligence is more and more extensive, among them pattern recognition is one of the ap ply of artificial intelligence. And now the application of pattern recognition is also more and more to get everyone's attention and support, in various aspects have significant progress. Pattern rec ognition has become an integral part of people around. Keywords: Artificial Intelligence, Technology,Pattern Recognition, prospects 一,引言 如今计算机硬件的高速发展, 以及计算机应用领域的不断开拓, 人们开始要求计算机能够更有效地感知诸如声音、文字、图像、温度、震动等人类赖以发展自身、改造环境所运用的信息资料。但就一般意义来说, 目前一般计算机却无法直接感知它们, 我们常用的键盘、鼠标等外部设备, 对于这些外部世界显得无能为力。虽然摄像机、图文扫描仪、话筒等设备业已解决了上述非电信号的转换, 并与计算机联机, 但由于识别技术不高, 而未能使计算机真正知道采录后的究竟是什么信息。计算机对外部世界感知能力的低下, 成为开拓计算机应用的瓶颈, 也与其高超的运算能力形成强烈的对比。于是, 着眼于拓宽计算机的应用领域, 提高其感知外部信息能力的学科———模式识别, 便得到迅速发展。 人工智能所研究的模式识别是指用计算机代替人类或帮助人类感知模式, 是对人类感知外界功能的模拟, 研究的是计算机模式识别系统, 也就是使一个计算机系统具有模拟人类通过感官接受外界信息、识别和理解周围环境的感知能力。现将人工智能在模式识别方面的一些具体和最新的应用范围遍及遥感、生物医学图象和信号的分析、工业产品的自动无损检验、指纹鉴定、文字和语音识别、机器视觉地圈模式识别等方面。 二,现状 以地图模式识别为例,地图模式识别是由计算机来对地图进行识别与理解, 并借助一定的技术手段, 让计算机研究和分析地图上的各种模式信息, 获取地图要素的质量意义。其计算处理的过程类似于人对地图的阅读。 地图模式识别是近年来在地图制图领域中新兴的一门高新技术, 是信息时代人工智能、模式识别技术在地图制图中的具体应用。由于它是传统地图制图迈向数字地图制图的一座桥梁, 因此,地图模式识别遥感技术、地理信息系统一起, 被称为现代地图制图的三大技术。 目前, 地图模式识别由于具有广泛的应用价值和发展潜力,因而受到了人们的普遍重视。尤其是随着现今的计算机及其外部硬件环境的不断提高, 科技不过发展的情况下,
大学物理(下)期末考试试卷
大学物理(下)期末考试试卷 一、 选择题:(每题3分,共30分) 1. 在感应电场中电磁感应定律可写成?-=?L K dt d l d E φ ,式中K E 为感应电场的电场强度。此式表明: (A) 闭合曲线L 上K E 处处相等。 (B) 感应电场是保守力场。 (C) 感应电场的电力线不是闭合曲线。 (D) 在感应电场中不能像对静电场那样引入电势的概念。 2.一简谐振动曲线如图所示,则振动周期是 (A) 2.62s (B) 2.40s (C) 2.20s (D) 2.00s 3.横谐波以波速u 沿x 轴负方向传播,t 时刻 的波形如图,则该时刻 (A) A 点振动速度大于零, (B) B 点静止不动 (C) C 点向下运动 (D) D 点振动速度小于零. 4.如图所示,有一平面简谐波沿x 轴负方向传 播,坐标原点O 的振动规律为)cos(0φω+=t A y , 则B 点的振动方程为 (A) []0)/(cos φω+-=u x t A y (B) [])/(cos u x t A y +=ω (C) })]/([cos{0φω+-=u x t A y (D) })]/([cos{0φω++=u x t A y 5. 一单色平行光束垂直照射在宽度为 1.20mm 的单缝上,在缝后放一焦距为2.0m 的会聚透镜,已知位于透镜焦平面处的屏幕上的中央明条纹宽度为2.00mm ,则入射光波长约为 (A )100000A (B )40000A (C )50000A (D )60000 A 6.若星光的波长按55000A 计算,孔镜为127cm 的大型望远镜所能分辨的两颗星2 4 1
电子科技大学模拟电路考试题及答案
电子科技大学 二零零七至二零零八学年第一学期期末考试 模拟电路基础课程考试题A卷(120分钟)考试形式:开卷 课程成绩构成:平时10分,期中30分,实验0分,期末60分 一(20分)、问答题 1.(4分)一般地,基本的BJT共射放大器、共基放大器和共集放大器的带宽哪个最大?哪个最小? 2.(4分)在集成运算放大器中,为什么输出级常用射极跟随器?为什么常用射极跟随器做缓冲级? 3.(4分)电流源的最重要的两个参数是什么?其中哪个参数决定了电流源在集成电路中常用做有源负载?在集成电路中采用有源负载有什么好处? 4.(4分)集成运算放大器为什么常采用差动放大器作为输入级? 5.(4分)在线性运算电路中,集成运算放大器为什么常连接成负反馈的形式?
二(10分)、电路如图1所示。已知电阻R S=0,r be=1kΩ,R1∥R2>>r be。 1.若要使下转折频率为10Hz,求电容C的值。 2.若R S≠0,仍保持下转折频率不变,电容C的值应该增加还是减小? 图1 三(10分)、电路如图2所示。已知差模电压增益为10。A点电压V A=-4V,硅三极管Q1和Q2的集电极电压V C1=V C2=6V,R C=10kΩ。求电阻R E和R G。 图2 四(10分)、电路如图3所示。已知三极管的β=50,r be=1.1kΩ,R1=150kΩ,R2=47k Ω,R3=10kΩ,R4=47kΩ,R5=33kΩ,R6=4.7kΩ,R7=4.7kΩ,R8=100Ω。 1.判断反馈类型; 2.画出A电路和B电路; 3.求反馈系数B; 4.若A电路的电压增益A v=835,计算A vf,R of和R if。
电子科技大学研究生模式识别试题 2014.04 (附答案)(优.选)
1 / 5word. 电子科技大学研究生试卷 (考试时间: 至 ,共 2 小时) 课程名称 模式识别 教师 学时 40 学分 2 教学方式 课堂教学 考核日期 年 月 日 成绩 考核方式: (学生填写) 1、(5分)简述有监督学习和无监督学习的异同。 答: (1)有监督学习必须要有训练集和测试样本,而非监督学习没有训练集; (2)有监督学习的目的就是识别事物,识别结果表现在给待识别数据加上了标号,因此训练样本集必须由带标号的样本组成,而非监督学习方法只有要分析的数据集本身,预先没有什么标号。 (3)非监督学习方法在寻找数据集中的规律性,这种规律性并不一定要达到分数据集的目的,也就是说不一定要“分类”。 2、(15分)计算单词model 和amdeol 的编辑距离,画出栅格图。 解: 栅格图为: a m d e o l m o d e l amdeol 从栅格图可计算,model 和amdeol 的编辑距离为3。 学 号 姓 名 学 院 ……………………密……………封……………线……………以……………内……………答……………题……………无……………效……………………
2 / 5word. 3、(15分)已知A 类样本为:123[0,1];[2,2];[2,3]a a a ===,B 类样本为:123[3,1];[4,3];[1,5]b b b ===,计算最小二乘分类面的方程(取值为-1和+1),并写出LMS 算法的流程。 解: (1)计算最小二乘分类面为[]0.4,0.26,1.45T ω=--。 (2)LMS 算法流程: 步骤1. 初始化训练样本、权向量; 步骤2. 选择一个训练样本,利用下列公式更新权向量: ()[][1][1]2 ()k k T k i i y μ --=--w w x x w 训练样本数目 步骤3. 重复所有样本。 4、(15分)在目标识别中,有1ω和2ω两种目标类型,它们的先验概率分别为0.8和0.2,在一次试验中,获得样本的类概率密度分别为()10.2p x ω=,()20.4p x ω=,并且已知110λ=,126λ=,211λ=,220λ=。试对该样本进行分类。 (1)基于最小错误率贝叶斯决策; (2)基于最小风险贝叶斯决策。 解:(1)利用贝叶斯公式,分别计算出1ω和2ω的后验概率: ()()() ()() 1112 1 0.20.8 0.66670.20.80.40.2 i i i p x P P x p x P ωωωωω=?= = =?+?∑ ()()() ()() 2222 1 0.40.2 0.33330.20.80.40.2 i i i p x P P x p x P ωωωωω=?= = =?+?∑ 根据贝叶斯决策规则,有 ()()12P x P x ωω> 所以合理的决策是把该样本归类于1ω。 (2)根据(1)的计算结果可知后验概率为
(完整版)大学物理下册期末考试A卷.doc
**大学学年第一学期期末考试卷 课程名称大学物理(下)考试日期 任课教师 ______________试卷编号_______ 考生姓名学号专业或类别 题号一二三四五六七总分累分人 签名题分40 10 10 10 10 10 10 100 得分 考生注意事项:1、本试卷共 6 页,请查看试卷中是否有缺页。 2、考试结束后,考生不得将试卷、答题纸和草稿纸带出考场。 部分常数:玻尔兹曼常数 k 1.38 10 23 J / K , 气体普适常数 R = 8.31 J/K.mol, 普朗克常量h = 6.63 10×34 J·s,电子电量e 1.60 10 19 C; 一、填空题(每空 2 分,共 40 分) 1. 一理想卡诺机在温度为 27℃和 127℃两个热源之间运转。若得分评卷人 使该机正循环运转,如从高温热源吸收1200J 的热量,则将向低 温热源放出热量 ______J; 2.1mol 理想气体经绝热自由膨胀至体积增大一倍为止,即 V22V1则在该过程中熵增S_____________J/k。 3.某理想气体的压强 P=105 Pa,方均根速率为 400m/s,则该气 体的密度 _____________kg/m3。 4.AB 直导体长为 L 以图示的速度运动,则导体中非静电性场强大小 ___________,方向为 __________,感应电动势的大小为 ____________。
5 5.平行板电容器的电容 C为 20.0 μ F,两板上的电压变化率为 dU/dt=1.50 × 10V/s ,则电容器两平行板间的位移电流为___________A。 6. 长度为 l ,横截面积为 S 的密绕长直螺线管通过的电流为I ,管上单位长度绕有n 匝线圈,则管内的磁能密度w 为 =____________ ,自感系数 L=___________。 7.边长为 a 的正方形的三个顶点上固定的三个点电荷如图所示。以无穷远为零电 势点,则 C 点电势 U C =___________;今将一电量为 +q 的点电荷 从 C点移到无穷远,则电场力对该电荷做功 A=___________。 8.长为 l 的圆柱形电容器,内半径为R1,外半径为R2,现使内极 板带电 Q ,外极板接地。有一带电粒子所带的电荷为q ,处在离 轴线为 r 处( R1r R2),则该粒子所受的电场力大小F_________________;若带电粒子从内极板由静止飞出,则粒子飞到外极板时,它所获得的动能E K________________。 9.闭合半圆型线圈通电流为 I ,半径为 R,置于磁感应强度为B 的均匀外磁场中,B0的方向垂直于AB,如图所示。则圆弧ACB 所受的磁力大小为 ______________,线圈所受磁力矩大小为__________________。 10.光电效应中,阴极金属的逸出功为2.0eV,入射光的波长为400nm ,则光电流的 遏止电压为 ____________V。金属材料的红限频率υ0 =__________________H Z。11.一个动能为40eV,质量为 9.11 × 10-31 kg的电子,其德布 罗意波长为nm。 12.截面半径为R 的长直载流螺线管中有均匀磁场,已知 dB 。如图所示,一导线 AB长为 R,则 AB导线中感生 C (C 0) dt 电动势大小为 _____________,A 点的感应电场大小为E。
电子科技大学大物上机实验(滕保华)
实验一 一.实验名称: 范德瓦尔斯方程分析 二.实验目的: 熟练运用Mathcad, 对理想气体方程和范德瓦尔斯方程比较分析。 三.实验原理: 理想气体物态方程只适用于压强不太大,温度不太低的气体。但当气体压强比较大,温度比较低即气体分子的数密度n 比较大时,气体分子间的实际间距没有理想气体间距那么大,分子间的相互作用力和分子本身的体积就加以考虑,所以需要找出实际气体的物态方程。 荷兰物理学家范德瓦耳斯改进了气体的状态方程,把分子间的作用力和分子的有限体积放进方程中去。他论证了,分子间距离较远时,它们间必定存在吸引力,这一作用附加到容器壁施加的压强上去。他进一步提供论据,假设附加产生的压强反比于气体比容的平方。还有,由于分子占有体积,它们可利用的空间必须减少,或者说,减少的总体积就正比于分子在相互接触时所占有的体积。于是一摩尔真实气体的状态方程变成 2V V m m a b RT p --= 或 RT b m a p V V m =-+))(2( 这简单方程包含两个常数,即 a 和 b ,对于每一种物质它们可由
实验确定。R 是普适气体数学。后来人们称之为范德瓦耳斯方程。他还导出了b 是分子体积的4 倍。这个方程不仅能解释安德纽斯的实验结果及J .汤姆生的见解,而且能从常数a 、b 值计算出临界参数。 范德瓦尔斯方程的引出,是从理论分析出发导出气体状态方程的一个典型例子。范德瓦尔斯方程只不过是用两个常数很粗略地考虑了气体内分子运动的行为,所以还不能精确地表述气体的p-v-t 关系。但是,它为用理论方法研究状态方程开拓了道路。特别是它在定性上能反映出物质气—液相变的性质。按照范德瓦尔斯状态方程在p-v 图上作出的定温线称为范德瓦尔斯定温线。因为该方程可以展开成摩尔体积V m 的三次方程: 0)(2 3=-++-ab a m RT pb m p V V V m 将范德瓦尔斯方程代入式 式中T c ,p c 是临界点的温度和压力值,称为物质的临界温度和压力
(完整版)成都电子科技大学自动化专业本科培养方案
自动化专业本科人才培养方案 一、专业代码与名称 专业代码:080602 专业名称:自动化 二、学制与学位 修业年限:四年 授予学位:工学学士 三、培养目标 经过系统的教育和教学活动,使学生具有扎实的基础、宽广的知识面和较强的实践动手能力,培养学生的创新精神和团队意识,使其在掌握自动化和控制工程领域先进技术的基础上,具有提出和解决带有挑战性问题的能力,不断提高自身的综合素质。同时,发展学生个性,培养学生具有健全人格,使其成为德智体美全面发展的高素质人才。 四、基本要求 本专业学生主要学习自动控制原理、计算机控制系统、传感器原理、过程控制系统、线性系统理论、电力电子技术、系统工程导论等专业知识,并接受1~2个学科专业方向的基本训练。毕业后可从事国民经济、国防和科研各部门的运动控制、过程控制、机器人智能控制、导航制导与控制,现代集成制造系统、模式识别与智能系统、系统工程理论与实践、新型传感器、电子与自动检测系统、复杂网络与计算机应用系统等领域的科学研究、技术开发、教学及管理等工作。 毕业生应获得以下几个方面的知识和能力: 1.扎实的数理基础,较好的人文社会科学和管理科学基础,以及外语综合能力; 2.系统掌握本学科领域必需的技术基础理论知识,包括电路理论、电子技术、信号与系统、自动控制理论、计算机软硬件、电力电子学、电力系统自动化等。 3.较强的工程实践能力,较熟练的计算机应用能力; 4.本学科领域内1~2个专业方向的知识与技能,了解本学科前沿的发展趋势; 5.较强的工作适应能力,一定的科学研究、技术开发和组织管理的实际工作能力。
五、专业特色 1、在科研、教学、实验和毕业设计环节与计算机技术、网络通信等专业有机结合,培养适应面宽广的“多才”专业; 2、理论与实践并重,培养学生的实际动手能力,不断提高学生的工程素质和专业基础,训练工程型人才; 3、开展各类竞赛辅助教学,培养学生的团队意识,引导学生发现问题并寻找解决问题的办法,不断提升学生的创新能力。 六、主干学科与主干课程 1、主干学科:检测技术及自动化装置、控制科学与工程 2、主干课程:自动控制原理、计算机控制系统、传感器原理、过程控制系统 3、双语教学课程:信号与系统、信息论导论、电力系统自动化、线性系统理论、数字 逻辑设计及应用 七、主要实践教学环节 1、实验:微型计算机系统原理及接口技术,电子技术实验基础I/II,现代电子技术综 合实验,电力电子技术,集成电路应用实验I/II,信号与系统,过程控制系 统,计算机控制系统,电机与拖动基础,传感器原理,自控原理基础实验, 单片机与PLC,数字系统设计,调速与随动,企业供配电系统,嵌入式系统 设计,现代控制技术综合实验,数字图像处理,现场总线控制系统,电力系 统自动化,信息论导论 2、上机:软件技术基础,现代工程设计制图,数值计算方法,自控原理基础实验,高 级语言程序设计,控制系统计算机仿真,计算机网络,现代控制技术综合实 验,人工智能导论,数字信号处理,系统工程导论 3、课程设计:电路分析基础,单片机与PLC,线性系统理论,现代控制技术综合实验 计算机控制系统,传感器原理,自控原理基础实验,单片机与PLC,数字系 统设计,企业供配电系统,嵌入式系统设计 4、实习实训:实习实训环节包括军事训练、基础工程训练、电工电气技术实训、电装 实习、综合课程设计、生产实习、毕业设计
大学物理下册期末考试B卷题目和答案
大学学年第二学期考试B卷 课程名称大学物理(下)考试日期 任课教师____________ 考生姓名学号专业或类别 题号一二三四五六七总分累分人 签名题分40101010101010 100 得分 考生注意事项:1、本试卷共 6 页,请查看试卷中是否有缺页。 2、考试结束后,考生不得将试卷、答题纸和草稿纸带出考场。 ε o =×10-12F·m-1、μ =4π×10-7H/m; k=×10-23 J·K-1、R= J·K-1·mol-1、 N A =×1023mol-1、e=×10-19C、电子静质量m e=×10-31kg, h=× 10-34J·s。 得分评卷人 一、填空题(每空2分,共40分) 1.体积为4升的容器内装有理想气体氧气(刚性分子),测得其压强为5×102Pa,则容器内氧气的平均转动动能总和为_______________J,系统的内能为_______________ J。 2.如图所示,一定质量的氧气(理想气体)由状态a 经b到达c,图中abc为一直线。求此过程中:气 体对外做的功为_ _______________;气体内能的增 加_______________;气体吸收的热量 _______________。 3.一绝热的封闭容器,用隔板分成相等的两部分,左 边充有一定量的某种气体,压强为p;右边为真空,若把隔板抽去(对外不漏气),
当又达到平衡时,气体的内能变化量为_______________J ,气体的熵变化情况是_______________(增大,不变,减小)。 4.有一段电荷线密度为λ长度为L 的均匀带电直线,,在其中心轴线上距O 为r 处P 点有一个点电荷q 。当r>>L 时,q 所受库仑力大小为_______________,当r< 第八届"飞思卡尔"杯全国大学生智能汽车竞赛技术报告 第八届“飞思卡尔”杯全国大学生 智能汽车竞赛 技术报告 学校:电子科技大学 队伍名称:成电超音速 参赛队员:王硕 李洋 马文建 带队教师:程玉华 第八届"飞思卡尔"杯全国大学生智能汽车竞赛技术报告关于技术报告和研究论文使用授权的说明 本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:所有参赛队伍必须与大赛各分赛区组委会签订参赛承诺协议,参赛作品的著作权归属参赛者本人,飞思卡尔半导体公司和比赛秘书处可以在相关主页及文献资料中收录并公开获奖作品的设计方案、技术报告及参赛模型车的视频、图像资料。 参赛队员签名: 带队教师签名: 日期: 第八届"飞思卡尔"杯全国大学生智能汽车竞赛技术报告 摘要 本文以第八届全国大学生智能车竞赛为背景,介绍了智能赛车控制系统的软硬件结构和开发流程。该比赛采用大赛组委会统一指定的A型车模,以Freescale半导体公司生产的32位单片机K60核心控制器,要求赛车在未知道 路上沿着电磁信号以最快的速度完成比赛。整个系统涉及车模机械结构调整、传感器电路设计及信号处理、控制算法和策略优化等多个方面。赛车采用谐振电路对赛道进行检测,提取赛道位置,用PD方式对舵机进行控制。同时通过编码器获取当前速度,采用PID控制实现速度闭环。 关键词:Freescale,智能车,电磁信号,PID ABSTRACT In the background of the8th National Intelligent Car Contest for College Students, this article introduces the software and hardware structures and the development flow of the vehicle control system.This contest adopting A-type car model prescribed by the contest organization committee,using the32-bit MCU K60 produced by Freescale Semiconductor Company as the core controller,requires the car finish the race in the fastest speed.The whole system includes the aspects of the mechanism structure adjustment,the sensor circuit design and signal process,control algorithm and strategy optimization etc.It captures the road information through resonant circuit,then abstracts the road position.After that, PD feedback control is used on the steering.At the same time,the system obtains the current speed using a speed sensor,so that it can realize the feedback control of the speed by PID method. Key words:Freescale,Intelligent vehicle,Electromagnetic signals,PID 第二章 1、 x=[2,4]; y=x.^3+(x-0.98).^2./(x+1.35).^3-5*(x+1./x) 2、 y=cos(pi/3)-(9-sqrt(2))^(1/3) 3、 a=3;A=4; b=a.^2; B=b.^2-1; c=a+A-2*B; C=a+2*B+c 4、x=[1 2 3;4 5 6;7 8 9] Desktop->Workspace,双击变量x 5、 clear x=magic(3) y=randn(3,3) xy=[x,y] yx=[x,y] z=xy(:,1:2) 6、 clear x=eye(4,4) y=triu(x) 7、 x=rand(4,5) y=x([1,2],:) z=(y>=0.3).*y 8、 clear x=randn(5,5) y=inv(x) 9、 clear x=randn(5,5) z=x^5 10、 clear A=[1,4,8;-3,6,-5;2,-7,-12]; B=[5,4,3;6,-2,3;-1,3,-9]; C=A*B D=A.*B 11、 clear x=linspace(0,2*pi,125); y=cos(x).*(0.5+3*sin(x)./(1+x.^2)); plot(x,y) z=-45:1:45; x=z.*sin(3*z);y=z.*cos(3*z); plot3(x,y,z); 13、 x=-2:0.1:2,y=x; [x,y]=meshgrid(x,y); z=x.^2.*exp(-x.^2-y.^2) surf(x,y,z); 14、 x=-2:0.1:2,y=x; [x,y]=meshgrid(x,y); z=x.^2.*exp(-x.^2-y.^2); surf(x,y,z); z1=0.05*x-0.05*y+0.1; hold on,mesh(x,y,z1); 15、 (1) n=2;alfa=0; t=0:0.1:10;x=cos(t);y=sin(n*t+alfa); subplot(2,2,1);plot(t,x,t,y); (2) n=2;alfa=0; t=0:0.1:10;x=cos(t);y=sin(n*t+alfa); subplot(2,2,1);plot(t,x,t,y); n=2;alfa=pi/3; t=0:0.1:10;x=cos(t);y=sin(n*t+alfa); subplot(2,2,2);plot(t,x,t,y); n=2;alfa=pi/2; t=0:0.1:10;x=cos(t);y=sin(n*t+alfa); 《大学物理》(下)期末统考试题(A 卷) 说明 1考试答案必须写在答题纸上,否则无效。请把答题纸撕下。 一、 选择题(30分,每题3分) 1.一质点作简谐振动,振动方程x=Acos(ωt+φ),当时间t=T/4(T 为周期)时,质点的速度为: (A) -Aωsinφ; (B) Aωsinφ; (C) -Aωcosφ; (D) Aωcosφ 参考解:v =dx/dt = -A ωsin (ωt+φ) ,cos )sin(2 4/?ω?ωπA A v T T t -=+?-== ∴选(C) 2.一弹簧振子作简谐振动,当其偏离平衡位置的位移的大小为振幅的1/4时,其动能为振动总能量的 (A) 7/6 (B) 9/16 (C) 11/16 (D )13/16 (E) 15/16 参考解:,1615)(221242122122 1221=-=kA k kA kA mv A ∴选(E ) 3.一平面简谐波在弹性媒质中传播,在媒质质元从平衡位置运动到最大位移处的过程中: (A) 它的动能转换成势能. (B) 它的势能转换成动能. (C) 它从相邻的一段质元获得能量其能量逐渐增大. (D) 它把自己的能量传给相邻的一段质元,其能量逐渐减小. 参考解:这里的条件是“平面简谐波在弹性媒质中传播”。由于弹性媒质的质元在平衡位置时的形变最大,所以势能动能最大,这时动能也最大;由于弹性媒质的质元在最大位移处时形变最小,所以势能也最小,这时动能也最小。质元的机械能由最大变到最小的过程中,同时也把该机械能传给相邻的一段质元。∴选(D ) 4.如图所示,折射率为n 2、厚度为e 的透明介质薄膜 的上方和下方的透明介质的折射率分别为n 1和n 3,已知n 1 <n 2<n 3.若用波长为λ的单色平行光垂直入射到该薄膜 上,则从薄膜上、下两表面反射的光束①与②的光程差是 (A) 2n 2 e . (B) 2n 2 e -λ / 2 . (C) 2n 2 e -λ. (D) 2n 2 e -λ / (2n 2). 参考解:半波损失现象发生在波由波疏媒质到波密媒质的界面的反射现象中。两束光分别经上下表面反射时,都是波疏媒质到波密媒质的界面的反射,同时存在着半波损失。所以,两束反射光的光程差是2n 2 e 。 ∴选(A ) 5.波长λ=5000?的单色光垂直照射到宽度a=0.25mm 的单缝上,单缝后面放置一凸透镜,在凸透镜的焦平面上放置一屏幕,用以观测衍射条纹,今测得屏幕上中央明条纹一侧第三个暗条纹和另一侧第三个暗条纹之间的距离d=12mm ,则凸透镜的焦距f 为: (A) 2m (B) 1m (C) 0.5m (D) 0.2m ; (E) 0.1m 参考解:由单缝衍射的暗纹公式, asin φ = 3λ, 和单缝衍射装置的几何关系 ftg φ = d/2, 另,当φ角很小时 sin φ = tg φ, 有 1103 310500061025.0101232==?=---?????λa d f (m ) , ∴选(B ) 6.测量单色光的波长时,下列方法中哪一种方法最为准确? (A) 双缝干涉 (B) 牛顿环 (C) 单缝衍射 (D) 光栅衍射 参考解:从我们做过的实验的经历和实验装置可知,最为准确的方法光栅衍射实验,其次是牛顿环实验。 ∴选(D ) 7.如果两个偏振片堆叠在一起,且偏振化方向之间夹角为60°,光强为I 0的自然光垂直入射在偏振片上,则出射光强为 (A) I 0 / 8. (B) I 0 / 4. (C) 3 I 0 / 8. (D) 3 I 0 / 4. 参考解:穿过第一个偏振片自然光的光强为I 0/2。随后,使用马吕斯定律,出射光强 10201 60cos I I I == ∴ 选(A ) n 3 成都电子科技大学物理电子学院团队介绍 目录 物电学院“超宽带电子学及应用”团队介绍 (2) 物理电子学院“大功率毫米波行波管研究”团队介绍 (3) 物理电子学院“高功率毫米波”团队介绍 (4) 物理电子学院“毫米波电路与系统”团队介绍 (5) 物理电子学院“计算电磁学及其应用”团队介绍 (6) 物理电子学院“理论物理”团队介绍 (8) 物理电子学院“理论与计算机模拟”团队介绍 (8) 物理电子学院“强辐射实验室”团队介绍 (10) 物理电子学院“太赫兹”团队介绍 (10) 物理电子学院“微波仿真”团队介绍 (12) 物理电子学院“微纳光学研究”团队介绍 (12) 物理电子学院“先进材料制备及其物理性质研究”团队介绍 (13) 物理电子学院“真空微电子及微波能应用研究”团队介绍 (15) 注:团队排列先后按照团队名称首字母。 物电学院“超宽带电子学及应用”团队介绍 一、团队简介 超宽带电子学及应用现有教师机工程技术人员8名,其中,教授1名,副教授3名,讲师3名,工程技术人员1名;有博士学位的教师3名,正在攻读博士学位的教师2名;50-60岁教师2名,40-50岁教师3名,30-40岁教师2名。 超宽带电子学团队的主要研究方向包括: (1) 新型光控光电导器件 研究激光与半导体相互作用理论与技术,新型光控光电导器件工作机理、研制工艺及应用。 (2) 电波传输与天线 研究瞬态电磁脉冲传输理论与技术,超宽带天线理论与技术。 (3) 生物电磁学 研究肿瘤电穿孔疗法的机理及应用,电穿孔效应在污水治理等领域的应用。(4) 微波电路与系统 研究高功率微波电路与系统在冲击雷达、探地雷达等领域中的应用。 二、团队导师介绍 三、毕业学生就业去向 团队培养的硕士研究生就业情况较好,主要去向包括国内一些研究所(如南京14所、成都29所、中国工程物理研究院等)和一些知名公司、企业(贝尔、华为、中兴等)。 电子科技大学导师研究方向 1、移动通信研究团队 李少谦教授、唐友喜教授、刘皓副教授、唐万斌副教授、武刚副教授、何旭副教授 研究方向:主要面向信号处理方向,偏向程序、算法、仿真,目前主要研究方向为MIMO,OFDM等 2、通信信号处理与专用集成电路研究团队 胡剑浩教授、凌翔副教授 研究方向:主要面向硬件,FPGA,芯片设计等 3、无线网络技术团队 郭伟教授、冯刚教授、余敬东副教授 研究方向:网络层,Ad-hoc 4、网络技术研究团队(严格来讲,雷维礼教授、、马立香副教授是宽带实验室,而非抗干扰) 雷维礼教授、毛玉明教授、冷苏鹏副教授、马立香副教授 研究方向:通信网与宽带通信技术、数据通信与计算机网络、宽带无线信息网络5、编码技术研究团队 周亮教授、张忠培教授、文红副教授 研究方向:编码技术、密码学 宽带光纤传输与通信网技术教育部重点实验室团队划分 1、光纤技术与光电子器件研究室 饶云江教授 研究方向:光纤传感、光电子器件 2、光通信技术研究室 邱昆教授、陈福深教授、许渤副教授、武保剑副教授、周东副教授 研究方向:、新型光通信理论与技术、光接入网技术、军用光通信与光电子技术3、宽带通信网络理论与技术研究室 团队1:宽带通信网研究组 李乐民院士、王晟教授、许都副教授、虞红芳副教授、徐世中副教授 研究方向:宽带光纤接入网络技术、宽带通信网中的交换技术、宽带无线网络技术 团队2:网络行为学与网络安全课题组 胡光岷教授、姚兴苗副教授 研究方向:网络行为学研究、网络安全研究 团队3:现代通信网技术及应用 李兴明教授 研究方向:现代通信网理论、网络的优化设计技术.、电信网络管理、高速信息 ANN-BP分类器设计 (控制工程XXXXXXXXXX) 一、问题表述 对“data3.m”数据,用其中一半的数据采用ANN-BP算法设计分类器,另一半数据用于测试分类器性能。 二、方法描述 神经网络(Neural Networks,NN)是由大量的、简单的处理单元(称为神经元)广泛地互相连接而形成的复杂网络系统,它反映了人脑功能的许多基本特征,是一个高度复杂的非线性动力学系统。神经网络具有大规模并行、分布式存储和处理、自组织、自适应和自学习能力,特别适合处理需要同时考虑许多因素和条件的、不精确和模糊的信息处理问题。 BP神经网络的标准学习过程: 神经网络在外界输入样本的刺激下,不断改变网络的连接权值,以使网络的输出不断地接近期望的输出。信号正向传播;若输出层的实际输出与期望的输出(教师信号)不符时,转入反向传播阶段;误差反传,误差以某种形式在各层表示——修正各层单元的权值;依次循环,直到网络输出的误差减少到可接受的程度或者进行到预先设定的学习次数为止。BP神经网络的标准学习步骤: 第一步,网络初始化给各连接权值分别赋一个区间(-1,1)内的随机数,设定误差函数e,给定计算精度值和最大学习次数M。 第二步,随机选取第k个输入样本及对应期望输出。 第三步,计算隐含层各神经元的输入和输出。 第四步,利用网络期望输出和实际输出,计算误差函数对输出层的各神经元的偏导数。 第五步,利用隐含层到输出层的连接权值、输出层的偏导数和隐含层的输出计算误差函数对隐含层各神经元的偏导数。 第六步,利用输出层各神经元的偏导数和隐含层各神经元的输出来修正连接权值。 第七步,利用隐含层各神经元的偏导数和输入层各神经元的输入修正连接权。 第八步,计算全局误差。 第九步,判断网络误差是否满足要求。当误差达到预设精度或学习次数大于设定的最大次数,则结束算法。否则,选取下一个学习样本及对应的期望输出,返回到第三步,进入下一轮学习。 BP神经网络的特点: 非线性映射能力:能学习和存贮大量输入-输出模式映射关系,而无需事先了解描述这种映射关系的数学方程。只要能提供足够多的样本模式对供网络进行学习训练,它便能完成由n 维输入空间到m维输出空间的非线性映射。 泛化能力:当向网络输入训练时未曾见过的非样本数据时, 网络也能完成由输入空间向输出空间的正确映射。这种能力称为泛化能力。 容错能力:输入样本中带有较大的误差甚至个别错误对网络的输入输出规律影响很小。 三、算法实现 %------将前半部分数据用作为训练样本,后半部分数据用来检验--------- y1=[x1(1:50,1),x1(1:50,2),x1(1:50,3)]; y2=[x2(1:45,1),x2(1:45,2),x2(1:45,3)]; 电子科技大学物理电子学院团队介绍 目录 物电学院“超宽带电子学及应用”团队介绍 (2) 物理电子学院“大功率毫米波行波管研究”团队介绍 (3) 物理电子学院“高功率毫米波”团队介绍 (4) 物理电子学院“毫米波电路与系统”团队介绍 (5) 物理电子学院“计算电磁学及其应用”团队介绍 (6) 物理电子学院“理论物理”团队介绍 (8) 物理电子学院“理论与计算机模拟”团队介绍 (8) 物理电子学院“强辐射实验室”团队介绍 (10) 物理电子学院“太赫兹”团队介绍 (10) 物理电子学院“微波仿真”团队介绍 (12) 物理电子学院“微纳光学研究”团队介绍 (12) 物理电子学院“先进材料制备及其物理性质研究”团队介绍 (13) 物理电子学院“真空微电子及微波能应用研究”团队介绍 (15) 注:团队排列先后按照团队名称首字母。 物电学院“超宽带电子学及应用”团队介绍 一、团队简介 超宽带电子学及应用现有教师机工程技术人员8名,其中,教授1名,副教授3名,讲师3名,工程技术人员1名;有博士学位的教师3名,正在攻读博士学位的教师2名;50-60岁教师2名,40-50岁教师3名,30-40岁教师2名。 超宽带电子学团队的主要研究方向包括: (1) 新型光控光电导器件 研究激光与半导体相互作用理论与技术,新型光控光电导器件工作机理、研制工艺及应用。 (2) 电波传输与天线 研究瞬态电磁脉冲传输理论与技术,超宽带天线理论与技术。 (3) 生物电磁学 研究肿瘤电穿孔疗法的机理及应用,电穿孔效应在污水治理等领域的应用。(4) 微波电路与系统 研究高功率微波电路与系统在冲击雷达、探地雷达等领域中的应用。 二、团队导师介绍 三、毕业学生就业去向 团队培养的硕士研究生就业情况较好,主要去向包括国内一些研究所(如南京14所、成都29所、中国工程物理研究院等)和一些知名公司、企业(贝尔、华为、中兴等)。 大学物理(下)试卷(A 卷) 院系: 班级:________ : 学号: 一、选择题(共30分,每题3分) 1. 设有一“无限大”均匀带正电荷的平面.取x 轴垂直带电平面,坐标原点在带电平面上,则 其周围空间各点的电场强度E 随距平面的位置 坐标x 变化的关系曲线为(规定场强方向沿x 轴正向为正、反之为负): [ ] 2. 如图所示,边长为a 的等边三角形的三个顶点上,分别放置 着三个正的点电荷q 、2q 、3q .若将另一正点电荷Q 从无穷远处移 到三角形的中心O 处,外力所作的功为: 0.0. 0.0 [ ] 3. 一个静止的氢离子(H +)在电场中被加速而获得的速率为一静止的氧离子(O +2 )在同一电场中且通过相同的路径被加速所获速率的: (A) 2倍. (B) 22倍. (C) 4倍. (D) 42倍. [ ] 4. 如图所示,一带负电荷的金属球,外面同心地罩一不带电的金属球壳,则在球壳中一点P 处的场强大小与电势(设无穷远处为电势零点)分别为: (A) E = 0,U > 0. (B) E = 0,U < 0. (C) E = 0,U = 0. (D) E > 0,U < 0.[ ] 5. C 1和C 2两空气电容器并联以后接电源充电.在电源保持联接的情况下,在C 1中插入一电介质板,如图所示, 则 (A) C 1极板上电荷增加,C 2极板上电荷减少. (B) C 1极板上电荷减少,C 2极板上电荷增加. x 3q 2 (C) C 1极板上电荷增加,C 2极板上电荷不变. (D) C 1极板上电荷减少,C 2极板上电荷不变. [ ] 6. 对位移电流,有下述四种说法,请指出哪一种说确. (A) 位移电流是指变化电场. (B) 位移电流是由线性变化磁场产生的. (C) 位移电流的热效应服从焦耳─楞次定律. (D) 位移电流的磁效应不服从安培环路定理. [ ] 7. 有下列几种说法: (1) 所有惯性系对物理基本规律都是等价的. (2) 在真空中,光的速度与光的频率、光源的运动状态无关. (3) 在任何惯性系中,光在真空中沿任何方向的传播速率都相同. 若问其中哪些说法是正确的, 答案是 (A) 只有(1)、(2)是正确的. (B) 只有(1)、(3)是正确的. (C) 只有(2)、(3)是正确的. (D) 三种说法都是正确的. [ ] 8. 在康普顿散射中,如果设反冲电子的速度为光速的60%,则因散射使电子获得的能量是其静止能量的 (A) 2倍. (B) 1.5倍. (C) 0.5倍. (D) 0.25倍. [ ] 9. 已知粒子处于宽度为a 的一维无限深势阱中运动的波函数为 a x n a x n π= sin 2)(ψ , n = 1, 2, 3, … 则当n = 1时,在 x 1 = a /4 →x 2 = 3a /4 区间找到粒子的概率为 (A) 0.091. (B) 0.182. (C) 1. . (D) 0.818. [ ] 10. 氢原子中处于3d 量子态的电子,描述其量子态的四个量子数(n ,l ,m l ,m s )可能取的值为 (A) (3,0,1,21- ). (B) (1,1,1,21 -). (C) (2,1,2,21). (D) (3,2,0,2 1 ). [ ] 二、填空题(共30分) 11.(本题3分) 一个带电荷q 、半径为R 的金属球壳,壳是真空,壳外是介电常量为 的无限大各向同 性均匀电介质,则此球壳的电势U =________________.电子科技大学-成电超音速技术报告-电磁组
《MATLAB及其在大学物理课程中地指导应用》习题问题详解___电子科大__第二版
《大学物理 》下期末考试 有答案
成都电子科技大学物理电子学院团队介绍
电子科技大学导师研究方向
电子科技大学模式识别作业ANN BP分类器设计
电子科技大学物理电子学院团队介绍
大学物理下期末试题及答案