外骨骼机械结构
外骨骼机械设计结构分类
1. 类人外骨骼
类人型外骨骼设计必须考虑适应每个操作者的身材体型以及承载能力
2. 非类人型外骨骼
BLEEX外骨骼设计
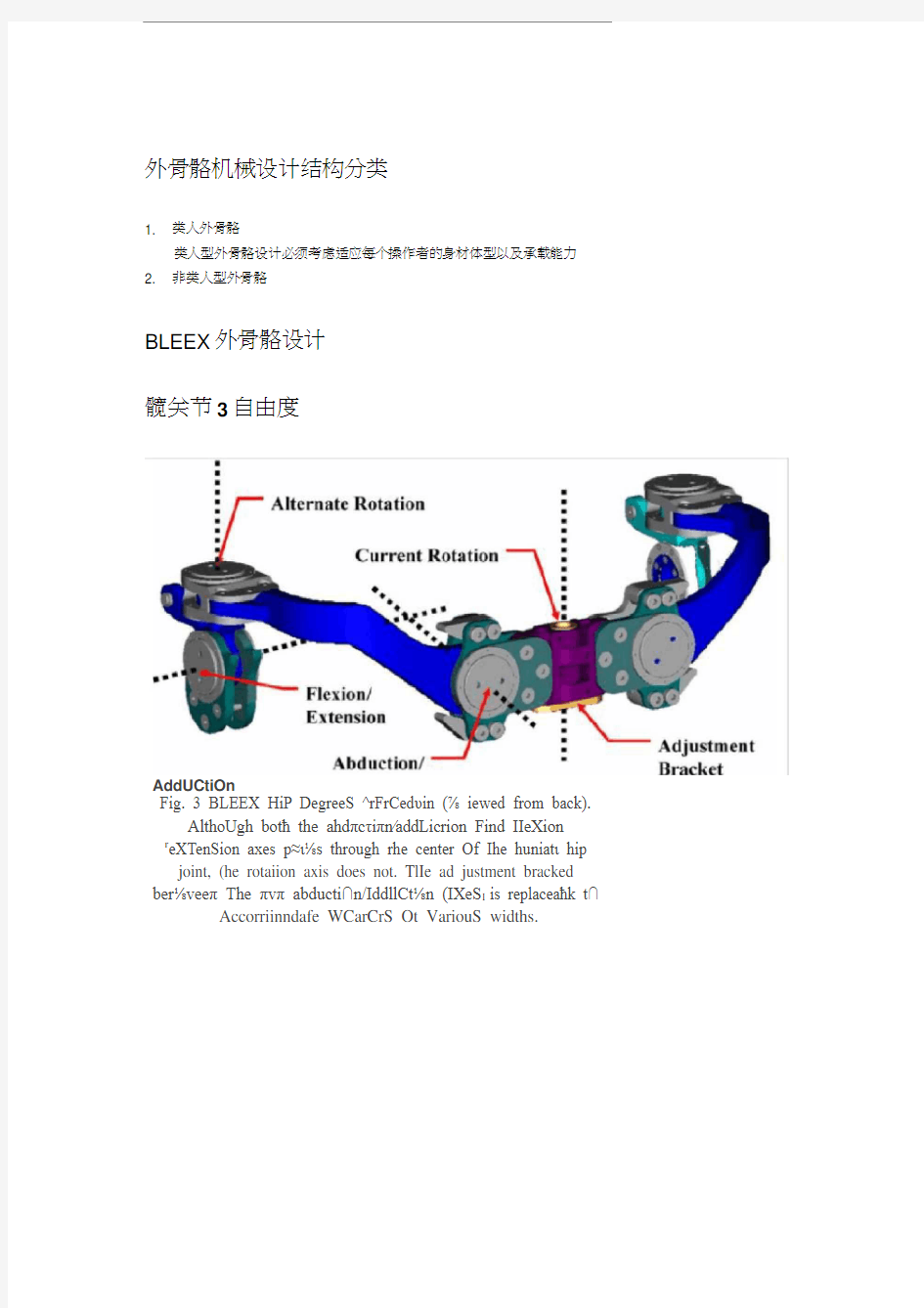
髋关节3自由度
AddUCtiOn
Fig. 3 BLEEX HiP DegreeS ^rFrCedυin (? iewed from back).
AlthoUgh bot? the ahdπcτiπn∕addLicrion Find IIeXion r eXTenSion axes p≈ι?s through rhe center Of Ihe huniatι hip joint, (he rotaiion axis does not. TlIe ad justment bracked ber?veeπ The πvπ abducti∩n/IddllCt?n (IXeS I is replacea?k t∩ Accorriinndafe WCarCrS Ot VariouS widths.
1?
膝关节1自由度
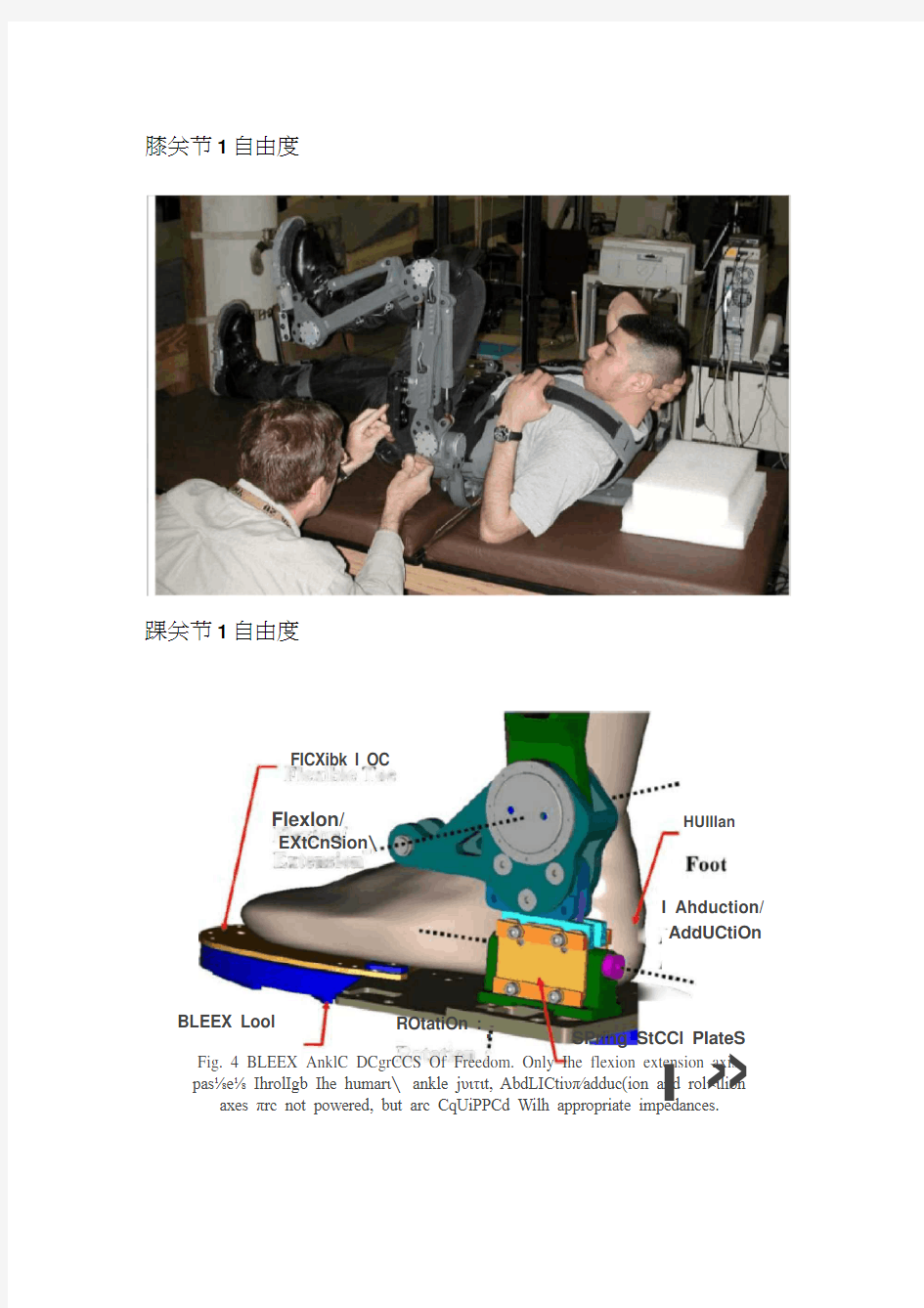
踝关节1自由度
FICXibk I OC
Flexlon/
EXtCnSion ?
I Ahduction/ AddUCtiOn
Fig. 4 BLEEX AnklC DCgrCCS Of Freedom. Only Ihe flexion extension axis pas?e? IhrolIgb Ihe humarι? ankle jυιτιt, AbdLICtiυπ∕adduc(ion and rol<ιlion
axes πrc not powered, but arc CqUiPPCd Wilh appropriate impedances.
HUIllan
BLEEX Lool
ROtatiOn :
■
SPring StCCl PIateS
旋转角度范围
TABLE 1
执行器选择
HiP AbdUCtion/ AddUCtlOn (actuated) TOe
FIeXiOn/Extension (COmPliant) ? HlP
FleXiOn/Extension > (actuated) AnkIe
AbdUCtlOn/Adduction (ComPIiant)
Ankle Plantarflexion/ DOrSifleXiOn (actuated) Eig. S BLELiX Degrees Of
Freedom.
液压执行器能量消耗
ASSU ming a SUPPly PreSSUre Of 6.9 MPa (1000 psi), the BLEEX actuators are SiZed to ProVide the joint torques See n in CGA data [24]. BLEEX USeS 19.05 mm (0.75 in Ch) bore,double-acti ng Iin ear PiSt On-cyli nders for all its join ts. OnCe the actuator SiZeS and moun ti ng POSiti OnS Were chose n to en SUre the required range of moti On [Table 1] and required torque [24], the joint velocity data WaS USed to determine the average fluid flow rate required to walk. The power SOUrCeS built for BLEEX all PrOVide a Con Sta nt SUPPIy PreSSUre of 6.9 MPa (1000 PSi) to the SerVOVaIVeS at all times, regardless of the desired actuator force and speed. Therefore, the average hydraulic power for each actuator is determined by multiplying the average flow rate by the SUPPIy PreSSUre. For BLEEX, the ankle, knee, and hip flexion/extension joints require an average of 1.3 kW of hydraulic power to walk [24]. An additi Onal 540 W of hydraulic power is n ecessary for man euvers
other
tha n walk ing and for the hip abduct ion/adducti On actuators. 4-way, double-stage
HiP ROtatiOn (COmPliant)
Knee FIeXiOn ×(actuated)
Ankte ROtatiOn
(Un-actuated);
SerVoValVeS Were SeleCted to Con trol the actuators due to their high ban dwidth, high flow rates, and low electrical power requirements. TheSe VaIVeS require approximately 28 W of hydraulic power each, so the eight VaIVeS Con SUme 224 W total. The total hydraulic power requireme nt for the 75 kg BLEEX (and payload) to walk at 1.3 m/s is approximately 2.27 kW, or 3.0 hp (including a 10% Safety factor) [24]
BLEEXO
Fig. 9 HLEEX Model (Sim 卩lif?d to CnIPhaSiZC major components)
AttaChment TO HarneSS
SPine
HiP FIeXiOn JOint
HiP ACtUatOr Knee JOint AnkIe ACtUator
Ankle FleXiOn
JOint
PayIOad & POWer
SUPPIy MOUnt Thigh
Shank
FOOt
Knee ACtUatOr
Bearing
Bearing
EnCOder
Fig. 10 BLEEX JOint Design. All actuated BLEEX JOintS are designed With great
PreCiSiOn to resist Iarge Ofr-axis InOlnentS and CXhibit IittIe fi βiction WhilC
COnCeaIing the joint CnCOdCrS ?
ACtUatOr MOUnt
Fig. 11 BLEEX FOOt DeSign (exploded VieW)
FOrCe SenSOr AnklC Ivlanirold
Knee COnrIeCtioII
AnkIe ValVe
Length
AdjUStment
Ankle ACtUatOr
ACCelerOmeterS
UiliVCrSaI JOint
Fig. 12 BLEEX Shank DeSign
AlIkIC COlIneCtiOll