无人机各模块详解与技术分析

无人机各模块详解与技术分析
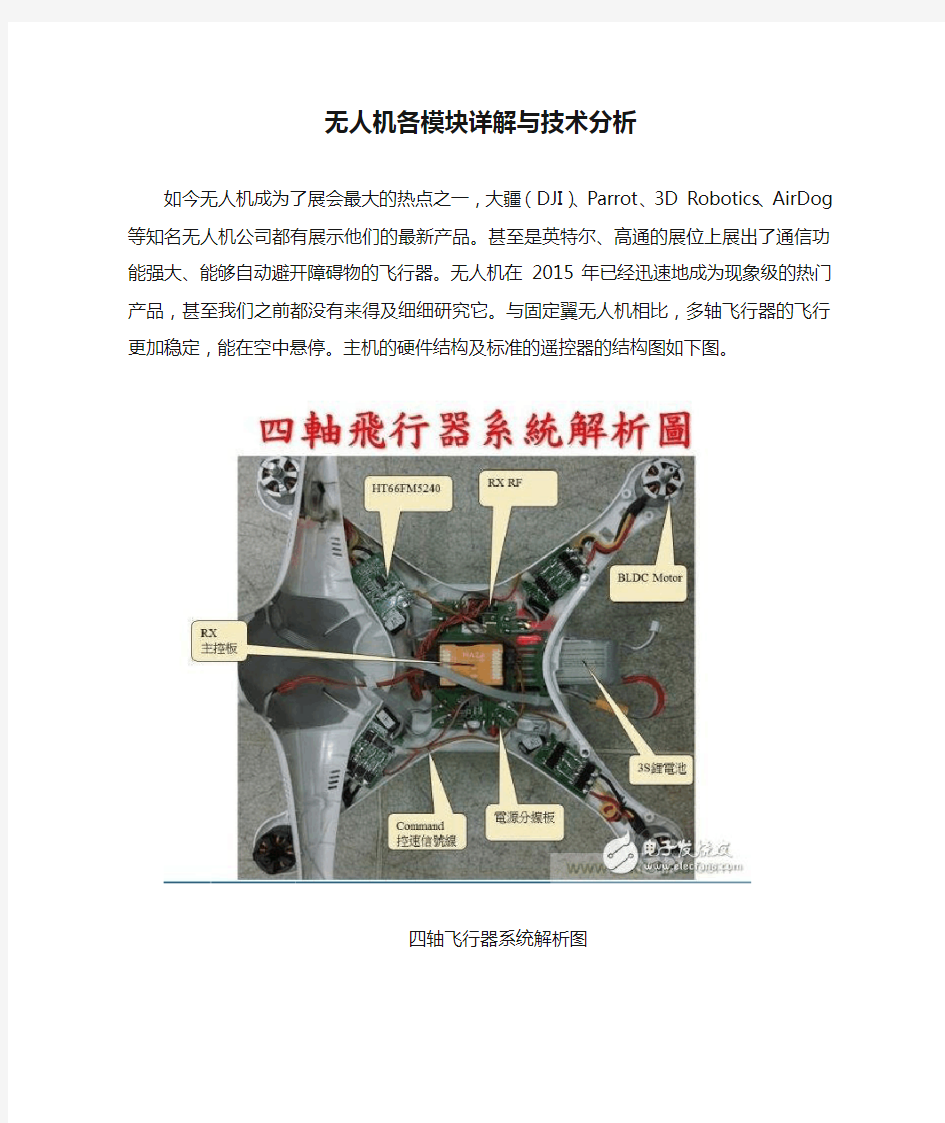
如今无人机成为了展会最大的热点之一,大疆(DJI)、Parrot、3D Robotics、AirDog 等知名无人机公司都有展示他们的最新产品。甚至是英特尔、高通的展位上展出了通信功能强大、能够自动避开障碍物的飞行器。无人机在2015年已经迅速地成为现象级的热门产品,甚至我们之前都没有来得及细细研究它。与固定翼无人机相比,多轴飞行器的飞行更加稳定,能在空中悬停。主机的硬件结构及标准的遥控器的结构图如下图。
四轴飞行器系统解析图
遥控器系统解析图
以上只是标准产品的解剖图,有些更加高级的如针对航模发烧友和航拍用户们的无人机系统,还会要求有云台、摄像头、视频传输系统以及视频接收等更多模块。飞控的大脑:微控制器
在四轴飞行器的飞控主板上,需要用到的芯片并不多。目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能。意法半导体高级市场工程师介绍,无人机/多轴飞行器主要部件包括飞行控制以及遥控器两部分。其中飞行控制包括电调/马达控制、飞机姿态控制以及云台控制等。目前主流的电调控制方式主要分成BLDC方波控制以及FOC正弦波控制。
新唐的MCU负责人表示:多轴飞行器由遥控,飞控,动力系统,航拍等不同模块构成,根据不同等级产品的需求,会采用到不同CPU内核。例如小四轴的飞行主控,因功能单纯,体积小,必须同时整合遥控接收,飞行控制及动力驱动功能;中高阶多轴飞行器则采用内建DSP 及浮点运算单元的,负责飞行主控功能,驱动无刷电机的电调(ESC)板则采用MINI5($1.0889)系列设计。低阶遥控器使用SOP20 封装的4T 8051 N79E814;中高阶遥控器则采用Cortex-M0 M051系列。另外,内建ARM9及H.264视频边译码器的N329系列SOC则应用于2.4G 及5.8G的航拍系统。
在飞控主板上,目前控制和处理用得最多的还是MCU而不是CPU。由于对于飞行控制方面主要都是浮点运算,简单的ARM Cortex-M4内核32位MCU都可以很
好的满足。有的传感器MEMS芯片中已经集成了DSP,与之搭配的话,更加简单的8位单片机也可以做到。
高通和英特尔推的飞控主芯片
CES上我们看到了高通和英特尔展示了功能更为丰富的多轴飞行器,他们采用了比微控制器(MCU)更为强大的CPU或是ARM Cortex-A系列处理器作为飞控主芯片。例如,高通CES上展示的Snapdragon Cargo无人机是基于高通Snapdragon 芯片开发出来的飞行控制器,它有无线通信、传感器集成和空间定位等功能。Intel CEO Brian Krzanich也亲自在CES上演示了他们的无人机。这款无人机采用了“RealSense”技术,能够建起3D地图和感知周围环境,它可以像一只蝙蝠一样飞行,能主动避免障碍物。英特尔的无人机是与一家德国工业无人机厂商Ascending Technologies合作开发,内置了高达6个英特尔的“RealSense”3D摄像头,以及采用了四核的英特尔凌动(Atom)处理器的PCI-express定制卡,来处理距离远近与传感器的实时信息,以及如何避免近距离的障碍物。这两家公司在CES展示如此强大功能的无人机,一是看好无人机的市场,二是美国即将推出相关法规,对无人机的飞行将有严格的管控。
此外,活跃在在机器人市场的欧洲处理器厂商XMOS也表示已经进入到无人机领域。XMOS公司市场营销和业务拓展副总裁Paul Neil博士表示,XMOS的xCORE
多核微控制器系列已被一些无人机/多轴飞行器的OEM客户采用。在这些系统中,XMOS多核微控制器既用于飞行控制也用于MCU内部通信。
Paul Neil说:xCORE多核微控制器拥有数量在8到32个之间的、频率高达500MHz 的32位RISC内核。xCORE器件也带有Hardware Response I/O接口,它们可提供卓越的硬件实时I/O性能,同时伴随很低的延迟。“这种多核解决方案支持完全独立地执行系统控制与通信任务,不产生任何实时操作系统(RTOS)开销。xCORE 微控制器的硬件实时性能使得我们的客户能够实现非常精确的控制算法,同时在系统内无抖动。xCORE多核微控制器的这些优点,正是吸引诸如无人机/多轴飞行器这样的高可靠性、高实时性应用用户的关键之处。”
多轴飞行器需要用到四至六颗无刷电机(马达),用来驱动无人机的旋翼。而马达驱动控制器就是用来控制无人机的速度与方向。原则上一颗马达需要配置一颗8位MCU来做控制,但也有一颗MCU控制多个BLDC马达的方案。
多轴无人机的EMS/传感器
某无人机方案商总经理认为,目前业内的玩具级飞行器,虽然大部分从三轴升级到了六轴MEMS,但通常采用的都是消费类产品如平板或手机上较常用的价格敏
感型型号。在专业航拍以及专为航模发烧友开发的中高端无人机上,则会用到质量更为价格更高的传感器,以保障无人机更为稳定、安全的飞行。
这些MEMS传感器主要用来实现飞行器的平稳控制和辅助导航。飞行器之所以能悬停,可以做航拍,是因为MEMS传感器可以检测飞行器在飞行过程中的俯仰角和滚转角变化,在检测到角度变化后,就可以控制电机向相反的方向转动,进而达到稳定的效果。这是一个典型的闭环控制系统。
至于用MEMS传感器测量角度变化,一般要选择组合传感器,既不能单纯依赖加速度计,也不能单纯依赖陀螺仪,这是因为每种传感器都有一定的局限性。比如说陀螺仪输出的是角速度,要通过积分才能获得角度,但是即使在零输入状态时,陀螺依然是有输出的,它的输出是白噪声和慢变随机函数的叠加,受此影响,在积分的过程中,必然会引进累计误差,积分时间越长,误差就越大。这就需要加速度计来校正陀螺仪,因为加速度计可以利用力的分解原理,通过重力加速度在不同轴向上的分量来判断倾角。由于没有积分误差,所以加速度计在相对静止的条件下可以校正陀螺仪的误差。但在运动状态下,加速度计输出的可信度就要下降,因为它测量的是重力和外力的合力。较常见的算法就是利用互补滤波,结合加速度计和陀螺仪的输出来算出角度变化。
ADI亚太区微机电产品市场和应用经理表示,ADI产品主要的优势就是在各种恶
劣条件下,均可获得高精度的输出。以陀螺仪为例,它的理想输出是只响应角速度变化,但实际上受设计和工艺的限制,陀螺对加速度也是敏感的,就是我们在陀螺仪数据手册上常见的deg/sec/g的指标。对于多轴飞行器的应用来说,这个指标尤为重要,因为飞行器中的马达一般会带来较强烈的振动,一旦减震控制不好,就会在飞行过程中产生很大的加速度,那势必会带来陀螺输出的变化,进而引起角度变化,马达就会误动作,最后给终端用户的直观感觉就是飞行器并不平稳。
除此之外,在某些情况下,如果飞行器突然转弯,可能会造成输入转速超过陀螺仪的测试量程,理想情况下,陀螺仪的输出应该是饱和输出,待转速恢复到陀螺仪量程范围后,陀螺仪再正确反应实时的角速度变化,但有些陀螺仪确不是这样,一旦输入超过量程,陀螺便会产生震荡输出,给出完全错误的角速度。还有某些情况下,飞行器会受到较大的加速度冲击,理想情况陀螺仪要尽量抑制这种冲击,ADI的陀螺仪在设计的时候,也充分考虑到这种情况,利用双核和四核的机械结构,采用差分输出的原理来抑制这种“共模”的冲击,准确测量“差模”的角速度变化。但某些陀螺仪在这种情况下会产生非常大错误输出,甚至是产生震荡输出。
“对于飞行器来说,最重要的一点就是安全,无论它的硬件设计还是软件设计,都要首先保证安全,而后才是极致的用户体验。”
“未来飞行器上的MEMS产品也会向集成化方向发展,比如3轴加速度加上3
轴陀螺仪的集成产品,甚至是SOC,把处理器也集成进去,直接提供角度输出供后端处理器调用。由于飞行器的应用场景一般都是户外,客户势必会做全温范围内的温度补偿,而在出厂前就对MEMS产品做好了全温范围内的温补,或者是设计超级低温漂的传感器,都会是MEMS产品在这一领域的发展方向。当然可靠性依然是最重要的指标。”他认为。
随着无人机的功能不断增加,GPS传感器、红外传感器、气压传感器、超声波传感器越来越多地被用到无人机上。方案商已经在利用红外和超声波传感器来开发出可自动避撞的无人机,以满足将来相关法规的要求。集成了GPS传感器的无人机则可以实现一键返航功能,防止无人机飞行丢失。而内置了GPS功能的无人机,可以在软件中设置接近机场或航空限制的敏感地点,不让飞机起飞。
最新股票实战技术指标详解大全
最新股票实战技术指标详解大全(收益翻30倍以上)一:大势型指标 1、ABI绝对广量指标 原始参数值:无 指标应用法则: 主要用于扫瞄瞬间极端的多头或空头力道。 高于320~350以上时,视为市场发生「冲力现象」。 3.越高的数据代表市场转向的机会越大。 4.随著上市公司家数递增,ABI 的极限数据须伴随修正。 5.本指标可设参考线。 2、ADL腾落指标 原始参数值:无 指标应用法则: 1.指数一顶比一顶高,而ADL 一顶比一顶低时,指数向下反转机会大。 2.指数一底比一底低,而ADL 一底比一底高时,指数向上反转机会大。 须与ADR、OBOS┅┅等指标配合使用。 3、ADR涨跌比率 指标热键:ADR 原始参数值:10 指标应用法则:
一般常态分布于~之间。 >,大盘回档机会大。 <,大盘反弹机会大。 <或,容易形成底部。 4、ARMS 阿姆氏指标 指标热键:ARMS 原始参数值:21 指标应用法则: 短期:ARMS<,超买;ARMS>,超卖。(参数为4)。 中期:ARMS<,超买;ARMS>,超卖。(参数为21)。 长期:ARMS<,超买;ARMS>,超卖。(参数为55)。 超买超卖值随各国股市特性,应自行调整。 本指标可设参考线。只适用于大盘日线。 5、BTI 广量动力指标 指标热键:BTI 原始参数值:10 指标应用法则: 1. 62~65为超买区。 2. 35~38为超卖区。 3. 当BTI 产生极大的冲力时,为大多头来临的前兆。 4. 本指标可设参考线。 6、C&A 钱龙中线指标
指标热键:CA 原始参数值:无 指标应用法则: 1.本指标二线向下交叉时,为极佳的卖点。 2.本指标二线向上交叉时,为极佳的买点。 3.本指标运用于指数期货交易,效果奇佳。 4.本指标为本公司研发部自行开发的指标。 7、COPPOCK 估波指标 指标热键:COP 原始参数值:12、10 指标应用法则: 1. COPPOCK 属于长线指标,当曲线由负值向上穿越0轴时,视为买进信号。 2.惯例上,COPPOCK不会产生卖出信号,但是,一般也有视曲线跌破0轴为卖出信号的用法。 3. 依COPPOCK 信号买进股票后,须借助其他指标的卖出信号为辅助。 8、MCL 麦克连指标 指标热键:MCL 原始参数值:19、39 指标应用法则: 1. 25~ 35之间为超买区,曲线穿越此区后再度反转跌破 25,
股票技术指标
招商银行一网通证券:https://www.360docs.net/doc/5013220252.html,/stock/StockKnowledge/index/ 股票技术指标——MACD KDJ BOLL等技术分析指标大全 https://www.360docs.net/doc/5013220252.html,/wz/jishujibiao.htm 多空指数(BBI) 多空指数是按照几种不同日数的移动平均线值根据天数加权平均得到的一项技术指标。主要是为了综合考虑不同日数的移动平均线。 股价在高价区域如果以收市价向下跌破BBI线为卖出信号,在低价区域以收市价向上突破BBI线为买入信号。 股价在一段时间内保持在BBI线上方表明多方势力占优,可持股;反之,如果股价一直保持在BBI 线下方,表明空方势力强劲,不宜介入。 根据实战经验,BBI线具有一定的滞后性,但如果在明显的牛市或熊市中操作,还是非常具有实用价值的。 随机指数(KDJ) 一、随机指标 随机指标是在威廉指标的基础上,引入移动平均线快、慢的概念,通过计算一定时间内的最高、最低价和收市价间的波幅,反映价格走势的强弱及超买超买动态,分析中、短期股市走势,是比较实用的技术指标。 二、公式 ?国内计算随机指标的周期为9天,K值D值为3天 ?RSV(9)=(今日收盘价-9日内最低价)÷(9日内最高价-9日内最低价)×100 ?K(n)=(当日RSV值+前一日K值)÷N ?D(n)=(当日K值+前一日D值)÷N ?J=3K-2D 三、KDJ分析要领 1.KDJ是中短期技术指标,但需要配合其他技术指标共同分析。 2.KD线活动范围在1--100之间。D值向上趋近70或超过70时,说明买盘力量大,进入超 买区,股市可能下跌。D值向下趋近30 或跌破30时,说明卖方力量很强,进入超卖区,股市的反弹性增强。J值>100%超买,J值<10%超卖。 3.当K线与D线交叉时,如果K>D,说明股市上涨,K线从下方突破D线,行情上涨, 可适当买进;如果K<D,K线从上向下跌破D线,行情转跌,可适当卖出。如果KD线 交叉突破反复在50左右震荡,说明行情正在整理,此时要结合J值,观察KD偏离的动
现货黄金技术分析常用指标
现货黄金技术分析常用指标 在现货黄金投资市场,技术指标是投资者不可缺少的投资分析工具。那么投资者常用哪些现货黄金技术分析指标呢? 1.资金流量指数指标(MFI) 资金流量指标(MFI)是测算资金投入市场并从市场中收回时的速率的技术指标。对于该指标的构筑和解释与相对强弱指标相似,区别只是在于:现货黄金成交量对于资金流量指数是重要的。 当我们分析资金流量指数时,必须考虑下列几点: (1)指标和黄金价格移动的偏离,如果价格上升而指标下降的话(或者相反),则价格存在一个极有可能的变化。 (2)资金流量指数值,如果超过80或者是低于20的话,则分别可以表明市场潜在的上升或探底趋势。 2.移动平均数汇总/分离指标(MACD) 移动平均汇总/分离指标是跟它表示了两个黄金价格移动平均随动态指标的第二个市场趋势。线的相互关联。 移动平均汇总/分离技术指标是26段和12段指数移动平均线的差额(EMA)。为了清楚的表明买卖的机会,所谓的信号曲线(9段指标移动平均线)会在移动平均汇总/分离技术指标图上做轨迹运动。 在摇摆较大的市场,该指数图表被证明是非常有效果的。有三种使用该指标的普遍方法:相交,过度买入和过度卖出条件和分离。 相交:最基本的MACD贸易规则就是当该指数低于信号曲线时,进行卖出,类似,当该指数高于信号曲线时,买入信号产生。当MACD指数在零点上下游离时,建议买入或卖出。
过度买入和卖出条件:MACD图表作为过度买入和过度卖出指标是非常有用的。当短期移动平均线急剧偏离长期移动平均线时(MACD指标上升),市场价格有可能过度的扩张,并且可能很快的会回到一个更为实际的水平线上。 分离:当MACD指数从市场分离时,就意味着当前趋势趋向于结束的时刻即将来到。当移动平均汇总/分离指标创出新高的时候,牛力的分离将会发生,此时,现货金价格并未能达到它的新高。当移动平均汇总/分离指标创出新低的时候,熊力的分离发生,此时价格也并未能达到它的新低。当这两种分离发生在过度买入和卖出的情况下时,他们的意义是非常重大的。 3.相对强弱指数指标(RSI) 相对强弱指数技术指标(RSI)是追寻震荡指标的价格,该震荡指标的取值范围在0-100之间。当WILDER在引进这个指数时,他建议使用一个14天的RSI 指标。自他提出这个建议以后,人们使用9天和25天的RSI指标也非常的普遍了。 分析RSI指标最为普遍的方法是:我们要寻找这样一个分离的情况,在那点上,市场的价格是创新高的,但RSI指标并未能超过它以前的那个高度。这样的分离暗示着一个迫近的相反趋势。当RSI指标那时开始反转,并且下降到它最近的那个低谷,人们称之为“失败摇摆”,“失败摇摆”被看作为是即将到来的一个相反趋势的确认。
主要股票技术指标公式解读
主要股票技术指标公式解读 目录 MACD指标详解 (2) DMI指标详解(趋向指标) (4) RSI指标详解(相对强弱指标) (6) EXPMA指标的使用方法 (8) TRIX指标详解和应用 (9) CR指标详解和应用 (10) VR指标详解(成交量变异率) (11) OBV指标详解(能量潮) (12) BRAR指标详解和应用 (13) SAR指标详解(停损点) (15) CCI指标详解(顺势指标) (17) KDJ指标详解(随机指标) (19) ROC指标详解(变动率指标) (21) BOLL指标应用详解(布林线) (22) DMA指标详解和应用 (24) WV AD指标详解(威廉变异离散量) (25) WR指标详解(威廉指标) (26) MIKE指标详解(麦克指标) (27) ASI指标详解(振动升降指标) (29) EMV指标详解(简易波动指标) (31) TRIX指标详解和应用 (33)
MACD指标详解 一、MACD指标详解——MACD用途 MACD指标主要是利用长短期二条平滑平均线,计算两者之间的差离值。该指标可以去除掉移动平均线经常出现的假讯号,又保留了移动平均线的优点。 由于MACD指标对价格变动的灵敏度不高,属于中长线指标,所以在盘整行情中不适用。 二、MACD指标详解——MACD使用方法 1、DIF与DEA均为正值时,大势属多头市场, 2、DIF与DEA均为负值时,大势属空头市场, 3、DIF向上突破DEA时,可买进, 4、DIF向下突破DEA时,应卖出。 三、MACD指标的使用心得 1、ADX指示行情处于盘整时,不采用该指标。 2、对短线客来说,使用该指标时,可将日线图转变为小时图或者周期更短的图形。 3、若要修改该指标的参数,不论放大或缩小参数,都应尽量设定为原始参数的整数倍。 四、MACD指标的计算公式 1、MACD由正负差(DIF)和异同平均数(DEA)两部分组成,当然,正负差是核心,DEA是辅助。先介绍DIF的计算方法。 DIF是快速平滑移动平均线与慢速平滑移动平均线的差,DIF的正负差的名称由此而来。快速和慢速的区别是进行指数平滑时采用的参数大小不同,快速是短期的,慢速是长期的。以现在常用的参数12和26为例,对DIF的计算过程进行介绍。 (1)快速平滑移动线(EMA)是12日的,计算公式为: 今日EMA(12)=2 12+1×今日收盘价+ 11 12+1 ×昨日EMA(12) (2)慢速平滑移动平均线(EMA)是26日的,计算公式为: 今日EMA(26)=2 26+1×今日收盘价+ 25 26+1 ×昨日EMA(26)
期货指标大全汇总文华财经指标技术分析指标大全 期货日内短线好指标
VAR2:=REF(LOW,1); VAR3:=SMA(ABS(LOW-VAR2),3,1)/SMA(MAX(LOW-VAR2,0),3,1)*100; VAR4:=EMA(VAR3*10,3); VAR5:=LLV(LOW,13); VAR6:=HHV(VAR4,13); CURRBARSCOUNT:=DATACOUNT-BARPOS+1; VAR7:=IF(CURRBARSCOUNT>34,1,0); VAR8:=EMA(IF(LOW<=VAR5,(VAR4+VAR6*2)/2,0),3)/618*VAR7; VAR9:=IF(VAR8>100,100,VAR8); 吸筹:VAR9,LINETHICK1,COLOREE00EE; STICKLINE1(VAR9>-120,0,VAR9,3,1); RSV:=(CLOSE-LLV(LOW,9))/(HHV(HIGH,9)-LLV(LOW,9))*100; K:=SMA(RSV,3,1); D:=SMA(K,3,1); J:=3*K-2*D; STICKLINE1(VAR9>1 AND J>REF(J,1) AND REF(J,1)
无人机技术论文
无人机技术论文 摘要 本文以某型固定翼无人机为研究对象,主要研究了基于常规PID和智能PID的无人机飞行控制律的设计问题,首先,建立了无人机的六自由度数学模型,并运用小扰动线性化方法和系数冻结法分别建立了无人机纵向与横侧向系统的线性化方程:其次,介绍了一些常用的PID 控制器参数整定法和智能PID控制的基本思想,作为飞行控制律设计的理论基础:再次,分别采用常规PID和智能PID进行了纵向系统与横侧向系统控制的设计,并针对不同空域的一些典型的状态点进行了大量的仿真研究。仿真结果表明,我们所设计的常规PID控多数情况下能满足要求,智能PID控制器则具备更强的鲁棒性,能适应不同空域中更多的状态点。 关键词:无人机,常规PID(自动控制),智能PID(自动控制),飞行控制律, 无人机飞控系统的仿真研究 ABSTRACT The primary purpose of this the conventional PID control and intelligent PID control strategies to the design of the UA V’s(Unmanned Aerial Vehicle)fight control law. First of all,the UA V’5six一degrees一of-freedom(6一DOF)math linearized.Then some basis the ores and the physiques about conventional PID control and intelligent PID control are mentioned followed by a Profound research on the control semen of the log attitudinal land lateral control system of the UA V.conventional PID and intelligent PID control strategists competitively plied to the design of the flight control law of the UA V’5fourfundamentalflighteontrolmode,in eluding Pithing angle control mode,altitude holding mode,roll in gangle control mode and yaw angle control mode. Finally,an amount of simulation 15 designed to validate effectiveness of the flight 。o一troll law based on conventional PID and intelligent PID control strategies.The results of the simulation show that the conventional PID flight control law effective,and the intelligent PID flight control law superior to the forme rone. Keywords: UAV , The conventional PID,Intelligent PID,Flight Control Law , 前言:
基于无人机技术在环境保护领域的应用分析
基于无人机技术在环境保护领域的应用分析 摘要四旋翼无人机飞行器因为它的结构简单,而且控制起来也很方便,因此,它成为近几年来发展起来的热门产业,由于随着科技发展脚步加快,对环境的重视不断加大,但现阶段污染源和污染方式越来越多,这使得环境保护的成本飙升,为了制约成本的上升,解决人工观测与检测时不可预知的危险,无人机成为一种非常重要的措施。基于此,本文对无人机技术加以介绍,以期通过该技术实现在环境保护领域的应用。 关键词四旋翼无人机;环境保护;节约成本;应用 前言 无人驾驶飞机简称“无人机”,英文缩写为“UA V”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。从技术角度定义可以分为:无人固定翼机、无人垂直起降机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便等特点。按应用领域,可分为军用与民用在民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄等等领域的应用,大大地拓展了无人机本身的用途,本文以无人机技术在环境领域中的应用为接入点,介绍了无人机的相关概念、设计方法和在环境保护领域的应用[1]。 1 四旋翼无人机的结构与工作原理 1.1 四旋翼无人机结构 嵌入式飞行控制器控制飞行姿态,电调、电机和螺旋桨提供飞行动力,航模电池提供电能,遥控器控制飞行模式。四旋翼无人机有两种组装模式,飞行正方向位于两机臂之间的是X字模式(如图2.1所示),还有十字模式的安装方式,不过用这种安装方式容易出现很多问题,一般很少运用(如图2.2所示)。在使用与性能上两者没有太大差距,出于习惯,多数研究者使用X模式,因而我们也选用X字模式。X字模式的安装方法意味着四个电机要按照对角的方式安装到机臂上,并且要保证在同一对角线上的电机旋转方向一致,两两相邻的电机则要旋转方向相反。如果认为2号电机和4号电机是逆时针转,那么1号电机和3号电机就要顺时针转,这样飞机才能稳定的飞行,这样做的目的是克服反扭矩。当然要想实现飞行器的多种飞行动作包括偏航,俯仰和横滚就需要四个电机来配合才能够达到目的。 1.2 四旋翼无人机工作原理 四旋翼无人机也可以算作是一种特殊的直升机,一般直升机只有一个主旋翼与一个尾桨,直升机通过舵机来控制螺旋桨的桨距角进而来控制器姿态。四旋翼
技术分析-指标详解部分
1十五.技术指标使用简介 本章简单介绍一些常用技术分析指标的使用方法。但技术指标博大精深,其详细使用技巧请参阅相关专业资料。 15.1 MACD指标 15.1.1DIF、MACD在0以上,大势属多头市场。DIF向上突破MACD,可作买;若DIF向下跌破MACD,只可作原单的平仓,不可新卖单进场。 15.1.2DIF、MACD在0以下,大势属空头市场。DIF向下跌破MACD,可作卖;若DIF向上突破MACD,只可作原单的平仓,不可新买单进场。 15.1.3牛差离:价格出现二或三个近期低点而MACD并不配合出现新低点,可作买。 15.1.4熊差离:价格出现二或三个近期高点而MACD并不配合出现新高点,可作卖。 15.1.5高档二次向下交叉大跌,低档二次向上交叉大涨。 15.2 DMI指标 15.2.1 +DI向上交叉-DI时,做买。 15.2.2 +DI向下交叉-DI时,做卖。 15.2.3 ADX于50以上向下转折时,代表市场趋势终了。 15.2.4当ADX滑落至DI之下时,不宜进场交易。 15.2.5当ADXR介于20~25时,宜采用TBP及CDP中之反应秘诀为交易参考。 15.3 DMA指标 15.3.1实线向上交叉虚线,买进;实线向下交叉虚线,卖出。 15.3.2 DMA也可观察与价格的背离。 15.4 EXPMA指标(世华瀑布线) 15.4.1指数移动平均线,克服简单均线收估价影响波动较大的缺点,本指标能更清楚的显示价格变动趋势,并且多根均线一旦形成汇聚点,则预示一个大的涨、跌趋势的到来。 15.5 BRAR指标 15.5.1 BR=100是强弱气势的均衡状态。 15.5.2 BR
企业财务报表分析指标大全
财务分析指标大全 一、变现能力比率 1、流动比率=流动资产÷流动负债 2、速动比率=(流动资产-存货)÷流动负债 3、营运资本=流动资产-流动负债 二、资产管理比率 1、存货周转率(次数)=主营业务成本÷平均存货 2、应收账款周转率=主营业务收入÷平均应收账款 3、营业周期=存货周转天数+应收账款周转天数 三、负债比率 1、产权比率=负债总额÷股东权益 2、已获利息倍数=息税前利润÷利息费用=EBIT/I 四、盈利能力比率 1、净资产收益率=净利润÷平均净资产 五、杜邦财务分析体系所用指标 1、权益净利率=资产净利率×权益乘数=销售净利率×总资产周转率×权益乘数 2、权益乘数=资产总额/股东权益总额=1+(负债总额/股东权益总额)=1/(1-资产负债率) 六、上市公司财务报告分析所用指标 1、每股收益(EPS)=(EBIT-I)(1-T)/普通股总股数=每股净资产×净资产收益率(当年股数没有发生增减变动时,后者也适用) 2、市盈率=普通股每股市价/普通股每股收益 3、每股股利=股利总额/年末普通股股份总数 4、股利支付率=股利总额/净利润总额=市盈率×股票获利率(当年股数没有发生增减变动时,后者也适用) 5、股票获利率=普通股每股股利/普通股每股市价(又叫:当期收益率、本期收益率) 6、股利保障倍数=每股收益/每股股利 7、每股净资产=年度末股东权益/年度末普通股数 8、市净率=每股市价/每股净资产 9、净资产收益率=净利润/年末净资产 七、现金流量分析指标 (一)现金流量的结构分析 1、经营活动流量=经营活动流入-经营活动流出 (二)流动性分析(反映偿债能力) 1、现金到期债务比=经营现金流量净额/本期到期债务
《技术指标分析大全》--MACD 指标买卖点详解
第5 章MACD 指标买卖点详解 前面我们已经提到过 K 线图、均线、成交量等技术指标,这些指标有一个特点,可以直接从市场上看到或经过简单的计算得到,可以归类为直接技术指标。但是还有一些技术指标,采用了更加复杂的数学或统计方法,属于间接的、衍生性的技术指标。从本章开始我们将介绍这些指标,首先介绍 MACD 指标。 5.1 新股民学 MACD 指标 【历史】 MACD(Moving Average Convergence and Divergence)是由美国著名投资专家杰拉德·阿佩尔(Gerald Appel)于 1979 年首创发明的一项股票市场技术分析工具。杰拉德·阿佩尔是阿佩尔资产管理公司及Signalert 投资咨询公司的 CEO,后者管理着 5 亿美元的客户资产。杰拉德因在技术分析和选时交易方面的造诣而闻名全球,他创造了指数平滑移动平均线(MACD),被公认为 MACD 之父。 【原理】 M A CD 指标,通过计算短期(常用 12 日)移动平均线与长期(常用 26 日)移动平均线之间的聚合与分离状况(即差值),对股票买进、卖出时机作出研判,在炒股软件上可以看到,M A CD 常见的形式是一条绕着零线上下不断波动的曲线。 M A CD 指标在计算过程中,采用短期的移动平均线减去长期的移动平均线,如果出现正值,说明短期股价平均值高于长期股价平均值,个股处于积极的走势之中;反之,当短期移动平均线减去长期的移动平均线出现负值,说明短期股价走势低于长期股价,个股处于弱势。 用一个物理学的名词来理解,MACD 指标相当于是股价走势的“加速度”,一旦其方向(向上或向下)确立后,股价将加快向该方向发展。 【种类】 构成 MACD 指标的有 DIFF 线、DEA 线以及柱状线三类。其中, DIFF 线,是指由于 12 日股价移动平均线移动快速,26 日股价移动平均线则运动得较慢,两条移动平均线会形成一定的差值,这一差值就用 DIFF 线来表示。其计算过程如下: 12 日平滑系数(S12)=2/(12+1)=0.1538 26 日平滑系数(L26)=2/(26+1)=0.0741 12 日指数平均值(12 日 EMA)=0.1538×当日收盘价+ 11/(12+1)×昨日的 12 日 EMA 26 日指数平均值(26 日 EMA)=0.0741×当日收盘价+ 25/(26+1)×昨日的 26 日 EMA 差离率(DIFF)=12 日 EMA-26 日 EMA 其中,EM A(Exponential Moving Average)即指数移动平均数指标,是 EXPMA 指标的简称,是以指数式递减加权方法对数据进行的移动平均处理,即各数值的加权是随时间前移而指数式递减,越近期的数据权重越大。 DEA 线,是指 9 日 DIFF 的指数移动平均线,用作信号线。计算公式如下: 九日 DIFF 平滑移动平均值(DEA)=当日的 DIFF×0.2 +昨日的 DEA×0.8 分析软件上还有一个指标叫柱状线(BAR),计算公式如下: BAR=2×(DIFF-DEA)
民用无人机发展现状及应用分析
民用无人机发展现状及应用分析 一、民用无人机行业发展现状 中投顾问在《2016-2020年中国无人机行业深度调研及投资前景预测报告》中表示,民用无人机的发展要归功于军用技术的民用化,与军用无人机的百年历史相比,民用无人机从20世纪80年代才开始起步,在近十年里得到了真正全面的发展。与军用无人机高空、高速、远程和高续航等要求不同,民用无人机技术要求低、更注重经济性,军用技术的民用化降低了无人机市场进入门槛和研发成本,使得民用无人机得以快速发展。 主要的军用无人机制造国如美国、以色列、欧洲和日本等均加快民用无人机产业化,民用无人机进入普及时代。 图表世界民用无人机不同领域销售额占比 资料来源:中投顾问产业研究中心
图表不同用途民用无人机 资料来源:中投顾问产业研究中心 民用领域对无人机的飞行速度要求通常在100公里/每小时以下,飞机高度在3000米以下,某些特殊应用飞行高度在4000-5000米。无人机已广泛应用于防灾减灾,搜索营救,边防巡逻,森林防火,气象探测和农作物估产,管道巡检等领域。由于小型无人机的航空特性和大面积巡查的特点,在洪水,旱情,地震和森林大火等自然灾害实时监测和评估方面具备特别优势。 中投顾问在《2016-2020年中国无人机行业深度调研及投资前景预测报告》中表示,民用无人机下游需求非常广泛,包括农业、电力石油、检灾、林业、气象、国土资源、安防、海洋水利、测绘、城市规划等多个行业。近年来无人机在民用市场的应用受到越来越多的关注,如农林植保和巡检两个领域,无人机需求较为迫切,且具备较大的市场规模。我们认为其它行业的潜在需求也将逐步显现,我国民用无人机市场空间巨大,将进入快速发展期。 二、中国民用无人机的应用情况 中投顾问在《2016-2020年中国无人机行业深度调研及投资前景预测报告》中表示,中国无人机起步较早,20世纪80年代,西北工业大学D-4固定翼无人机就对地图测绘和地质勘探做了尝试,但是民用无人机领域开发长期以来没有受到足够的重视。直到近年来由于需求牵引,尤其是灾害频发急需一种灾情监视评估和搜救手段,民用无人机才得到充分关注。
技术分析和基本分析异同点
技术分析和基本分析有何异同点 是指以行为为研究对象,以判断市场趋势并跟随趋势的周期性变化来进行及一切金融衍交易决策的方法的总和。这句话的含义是:所有的基础事件--经济事件、社会事件、战争、自然灾害等等作用于市场的因素都会反映到价格变化中来。所以技术分析认为只要关注价格趋势的变化及的变化就可以找到盈利的线索。技术分析的目的不是为了跟庄。技术分析的目的是为了寻找买入、卖出、止损信号,并通过资金管理而达成在市场中长期稳定获利。 技术分析理论基础:市场行为包容消化一切;价格以趋势方式运行;历史会重演,但不会简单重复。 与技术分析相对应的分析被称为基础分析。基础分析又称分析,基本分析法通过对决定股票内在价值和影响股票价格的宏观经济形势、状况、公司经营状况等进行分析,评估股票的价值和合理价值,与价进行比较,相应形成买卖的建议。但是注意基本面分析不等于基本面,基本面是指一切影响供需的事件。基本面分析则是指对这些基本事件进行归纳总结,最终来确定标的物的内在价值。当标的物的价格高于标的物的价值时,被称为价值高估,在交易中则需减持,反之如果价格低于价值则被称为价值低估,在交易中则需买入。从交易实践来看,技术分析方法要领先于基础分析方法。在操作上技术分析则更为实用。再补充说明一下:无论是技术分析还是基础分析方法都不是跟庄的工具。跟庄只是一些习惯作弊的人在交易中的一种反映。庄对于一个严谨的技术分析者而言微不足道,他们无须跟随它,因为庄和市场比较起来什么都不算。
基本分析包括三个方面内容 1.宏观经济分析。研究经济政策(货币政策、财政政策、税收政策、 产业政策等)、经济指标(国内生产总值、失业率、率、、等)对股票市场的影响; 2.行业分析。分析产业前景、区域经济发展对上市公司的影响; 3.公司分析。具体分析上市公司行业地位、市场前景、财务状况。 技术分析优缺点:技术分析具备全面、直接、准确、可操作性强、适用范围广等显着特点。与基本分析相比,技术分析进行交易的见效快,获得利益的周期短。此外,技术分析对市场的反应比较直接,分析的结果也更接近实际市场的局部现象。通过市场分析得到的进出场位置相比较基本分析而言,往往比较准确。技术分析的缺点是考虑对象的范围相对较窄,对长远的市场趋势难以进行有效的判断。技术分析相对于基本分析更适用于短期的行情预测,要进行周期较长的分析则必须参考基本分析,这是应用技术分析最应该注意的问题。因为技术分析是经验的总结而非科学体系,所以通过技术分析所得到的结论并由此进行的交易操作需要以概率的形式为投资者带来收益。 基本分析优缺点:基本分析分析的起点在于信息的收集,道听途说的市场传闻有很大的欺骗性和风险性,上市公司的实地调研耗费人力、财力大,对于一般投资者而言,进行股票投资分析,特别是基本分析,依靠的主要还是媒体登载的国内外新闻以及上市公司公开披露的信息。基本分析法能够比
无人机设计手册及主要技术.docx
无人机设计手册及主要技术 内容简介 独家《无人机设计手册》分上、下两册共十二章。 上册包括无人机系统总体设计,气动、强度、结构设计,动力装置,发射与 回收系统,飞行控制与管理系统。 下册包括机载电气系统,指挥控制与任务规划,测控与信息传输,有人机改装无人机,综合保障设计,可靠性、维修性、安全性和环境适应性以及无人机飞行试验等。有关无人机任务设备、卫星中继通信的设计以及正在发展的无人机技术等内容,有待手册再版时编入,使无人机设计手册不断成熟和丰富。 适用人群 本手册是国内第一部较全面系统阐述无人机设计技术的工具书,不仅可作为 无人机的设计参考,也可以作为院校无人机教学、无人机行业的工程技术人员和管理人员的参考书,并可供无人机部队试验人员使用。希望本手册的出版能对我国无人机研制工作的技术支持有所裨益。 作者简介 祝小平,现任西北工业大学无人机所总工程师,主要从事无人机总体设计、飞行控制与制导系统设计等研究工作。主持了工程型号、国防预研等国家重点项目多项,获国家和部级科学技术奖9项,其中国家科技进步一等奖1项,国防科技进步一等奖4项,获技术发明专利10项,荣立“国防科技工业武器装备型号研制”个人一等功,发表论著150多篇。先后入选国家级“新世纪百千万人
才工程”、国防科技工业“人才工程”和教育部“新世纪优秀人才支持计 划”,获得“国防科技工业百名优秀博士、硕士”、“国防科技工业有突出贡献的中青年专家”、“陕西省有突出贡献专家”和“科学中国人(2009)年度人物” 等荣誉称号。 无人机相关GJB标准- -融融网 gjb 8265-2014无人机机载电子测量设备通用规范 gjb 4108-2000军用小型无人机系统部队试验规程 gjb 5190-2004无人机载有源雷达假目标通用规范 gjb 7201-2011舰载无人机雷达对抗载荷自动测试设备通用规范 gjb 5433-2005无人机系统通用要求 gjb 2347-1995无人机通用规范 gjb 6724-2009通信干扰无人机通用规范 gjb 6703-2009无人机测控系统通用要求 gjb 2018-1994无人机发射系统通用要求 无人机主要技术 一、动力技术 续航能力是目前制约无人机发展的重大障碍,业内人士也普遍认为消费级多 旋翼续航时间基本维持在20min左右,很是鸡肋。逼得用户外出飞行不得不携 带多块电池备用,造成使用操作的诸多不便,为此有诸多企业在2016年里做出 了新的尝试。 1. 氢燃料电池
股票21个技术指标精解大全学习资料
MACD指标详解 一、MACD指标详解——MACD用途 MACD指标主要是利用长短期二条平滑平均线,计算两者之间的差离值。该指标可以去除掉移动平均线经常出现的假讯号,又保留了移动平均线的优点。 由于MACD指标对价格变动的灵敏度不高,属于中长线指标,所以在盘整行情中不适用。 二、MACD指标详解——MACD使用方法 1、DIF与DEA均为正值时,大势属多头市场, 2、DIF与DEA均为负值时,大势属空头市场, 3、DIF向上突破DEA时,可买进, 4、DIF向下突破DEA时,应卖出。 三.MACD指标的使用心得: 1. ADX指示行情处于盘整时,不采用该指标。 2.对短线客来说,使用该指标时,可将日线图转变为小时图或者周期更短的图形。
3.若要修改该指标的参数,不论放大或缩小参数,都应尽量设定为原始参数的整数倍。 四.MACD指标的计算公式: 1.MACD由正负差(DIF)和异同平均数(DEA)两部分组成,当然,正负差是核心,DEA是辅助。先介绍DIF的计算方法。 DIF是快速平滑移动平均线与慢速平滑移动平均线的差,DIF的正负差的名称由此而来。快速和慢速的区别是进行指数平滑时采用的参数大小不同,快速是短期的,慢速是长期的。以现在常用的参数12和26为例,对DIF的计算过程进行介绍。 (1)快速平滑移动线(EMA)是12日的,计算公式为: 今日EMA(12)=2/(12+1)×今日收盘价+11/(12+1)×昨日EMA(12) (2)慢速平滑移动平均线(EMA)是26日的,计算公式为: 今日EMA(26)=2/(26+1)×今日收盘价+25/(26+1)×昨日EMA(26) 以上两个公式是指数平滑的公式,平滑因子分别为2/13和2/27。如果选别的系数,则可照此法办理。 DIF=EMA(12)-EMA(26) 有了DIF之后,MACD的核心就有了。单独的DIF也能进行行情预测,但为了使信号更可靠,我们引入了另一个指标DEA。 2.DEA是DIF的移动平均,也就是连续数日的DIF的算术平均。这样,DEA自己又有了个参数,那就是作算术平均的DIF的个数,即天数。 对DIF作移动平均就像对收盘价作移动平均一样,是为了消除偶然因素的影响,使结论更可靠。 3.此外,在分析软件上还有一个指标叫柱状线(BAR):
无人机航测技术的研究及应用实践可行性分析
无人机航测技术的研究及应用实践可行性分析 发表时间:2018-12-05T11:59:02.880Z 来源:《防护工程》2018年第25期作者:朱飞飞 [导读] 应急测绘等提供了解决方案。使用无人机图像的航测1:1000、1:2000等大型地形图的方法已相对成熟,但航测1:500个大型地形图的情况并不多。在此基础上,研究了基于无人机航拍系统的航测1:500大型地形图的方法取得了良好的效果。 朱飞飞 国网浙江省电力有限公司丽水供电公司浙江 323000 摘要:随着无人机技术的迅速发展,基于无人机的航空摄影得到了广泛应用,为城市规划,应急测绘等提供了解决方案。使用无人机图像的航测1:1000、1:2000等大型地形图的方法已相对成熟,但航测1:500个大型地形图的情况并不多。在此基础上,研究了基于无人机航拍系统的航测1:500大型地形图的方法取得了良好的效果。 关键词:无人机航测;应用;实践;可行性 前言 近年来,使用无人机快速获取地面图像和进行大规模航空测量时,许多专业人员已经尝试并获得了满足精度要求的地理空间数据。但在进行1:500航测测绘,没有太多具体的应用实例。本文基于浙江省丽水市的试验区以1:500航测为例验证基于无人机的大型航测方法是否达到1:500地形图的成图精度要求。 1.基于无人机航测的大规模测绘方法 首先,利用无人机航拍系统在项目区域进行航空摄影,获得该区域内合格的无人机图像,然后进行加密来建立用于三维特征集合的数字三维模型。它解决了传统方法中提升精度达不到标准的问题。 2.基于某一调查区域,无人机航测大规模测绘实践 2.1航空摄影 本文采用大尺度测绘方法对丽水市某调查区的无人机进行航空测量1:500数字化测图实践研究。使用南京开悦科技有限公司生产的GC-610多旋翼无人机,摄影传感器使用Sony A7 R全画幅CMOS相机。无人机飞行控制导航系统使用大疆的悟空M进行航拍。焦距为35毫米,航向重叠一般应为60%至80%,最小值不应小于53%。侧面重叠一般应为15%-60%,最小值不应小于8%。航向覆盖范围应不小于射击边界以外的2个基线。超出拍摄区域边界的横向覆盖范围通常不小于图像宽度的50%,并且至少不小于图像宽度的30%。 2.2空三加密 在本文中,INPHO系统的MATCH-AT模块用于在测量区域上执行波束方法,以获得高精度定向点和外部定向元素。为建立调查模型和内部数据收集提供准确的数学基础。满足规范规定空气三角测量加密控制点的平面和高程误差,并且完成了区域网络调整计算后的基本定向点残差的准确度指标,超额控制点差异值和公共点差。 2.3等高线、高程点提取 使用Microstation v8软件的TerraSolid模块,基于机载LiDAR预处理数据(自动分类的结果),参考粗略正射影像数据执行手动分类过滤。使用获取的高精度地面点云数据提取高程点以生成等高线。对于地形复杂,植被茂密的地区,当点云数据不能正确表示地形时,基于点云数据生成的轮廓有必要测量和调整场地中的高程信息和等高线。 2.4数字立体模型建立、采集 使用Aerospace Vision MapMatrix软件进行立体测绘。原则上,使用空三引导方法建立数字三维模型。通过实验已经证实,在导入外部定向元素时,注意编辑外部定向元素的KAP-PA角度并使KAPPA角度增加。 立体数据采集的基本要求:1在三维模型下,检查由LiDAR地面点云数据提取的等高线和高程点等地貌要素,发现不合理的地方得到纠正;2在保证测绘精度的前提下,注重美观;3连接现有的地形图数据,并更新地形图。当其余数据连接到现有的地形图数据时,如果边框的边缘未满且元素发生很大变化,应更新和映射现有的地形图数据;4立体映射原则上由现场定义;5当部分覆盖局部物体的轮廓时,应准确测量可见部分。有必要在地图轮廓外的空白处标记或解释标记,并将其留在现场进行额外的测试处理。为外部用图提供最大的方便; 2.5外业调绘和补测 对于内部行业泄漏检测以及新功能和地形,应进行调整并完成测试。通常,应使用完整的分析方法在现场测量新的地面物体;可以通过距离交叉方法和平行或垂直截距方法重新测试单个零星的新特征,其中不少于3个已知特征点与未知对象点相交。 2.6数据编辑 在基于AutoCAD平台的CADS软件编辑软件上,处理初始测量和垂直测量数据的轮廓,形成DWG格式的DLG数据。请参考字段映射的结果:编辑1:500级数字地形图数据,添加各种注释元素等,以确保结果满足数字表达和数据结构中的数字新技术设计要求。最后,形成了满足规范要求的数字地形图。 3.像控选点及观测 图像选择和测试工作必须清晰、仔细寄处理特殊问题,应考虑并准备好应对可能出现的问题。 3.1控制点选择应遵循的基本原则(1)图像控制点的选择范围应完全控制整个映射区域。如果图像控制点的选择点不能控制整个测量区域,则控制点选择点范围之外的映射区域的高程误差将沿着图像控制点的方向呈指数增加。(2)在图像控制点布置之前,应严格按照规范设计图像控制点,不超过基线的标题和数量,不超过控制点的基线。因为当航向或侧跨超过极限时,区域网络的精度将大大降低;当图像控制点的基线超过限制时,加密期间本地加密点的准确度将降低,这将影响映射的准确性。(3)图像控制点易于在平面图像中选择,图像清晰,交叉角度好(30-120°)。因为这三个方面会影响加密时定位点的测量精度。(4)当标准点或主要点落入水中时,必须使用整个场布局方法,并且不能使用区域网络点方法。因为当标准点或主要点落入水中时,使用区域网络点可能导致失真,这会影响整个加密分区的准确性。 3.2图像选择点的基本方法和质量控制。(1)首先,基于提交的航空摄影数据的检查报告确定图像控制点布局方案。对于没有降水区域
股票技术指标精解大全
股票技术指标精解大全 目录 祖。0指标详解^ 2 0^1指标详解(趋向指标)^ 4 及81指标详解(相对强弱指标)^ 6 2乂?“八指标的使用方法^ 8 丁见乂指标详解和应用^ 10 0^指标详解和应用^11 乂及指标详解(成交量变异率)^ 13 06乂指标详解(能量潮)^ 15 6^^^指标详解和应用^ 16 8八及指标详解(停损点)^ 18 001指标详解(顺势指标)^20 ^0;指标详解(随机指标)^22 ^00指标详解(变动率指标〕^24 60匕I指标应用详解(布林线)^25 0嫩指标详解和应用^27 胃八0指标详解(威廉变异离散量)^28 狐指标详解(威廉指标)^29 V I础指标详解(麦克指标)^30 入81指标详解(振动升降指标)^32 指标详解(简易波动指标)^34 丁见乂指标详解和应用^36
指标详解 一、^^00指标详解^^^00用途 ^^00指标主要是利用长短期二条平滑平均线,计算两者之间的差离值。该指标可以去除掉移动平均 线经常出现的假讯号,又保留了移动平均线的优点。 由于^八00指标对价格变动的灵敏度不高,属于中长线指标,所以在盘整行情中不适用。 二、心00指标详解^^^00使用方法 1、01?与02人均为正值时,大势属多头市场, 2、01?与02人均为负值时,大势属空头市场, 3、01?向上突破02八时,可买进, 4、01?向下突破02八时,应卖出。 [肌卿----71559712723 : 355575571^---------------------------------- 600853 日期 20000615 开2 6.81 最高 7.20 妨?V229277 三、1^00指标的使用心得 1、八0乂指示行情处于盘整时,不采用该指标。 2、对短线客来说,使用该指标时,可将日线图转变为小时图或者周期更短的图形。 3、若要修改该指标的参数,不论放大或缩小参数,都应尽量设定为原始参数的整数倍。 四、1入00指标的计算公式 1、^^00由正负差①正)和异同平均数卬2八)两部分组成,当然,正负差是核心,02八是辅助。先介绍01?的计算方法。 01?是快速平滑移动平均线与慢速平滑移动平均线的差,01?的正负差的名称由此而来。快速和慢速 的区别是进行指数平滑时采用的参数大小不同,快速是短期的,慢速是长期的。以现在常用的参数12和 26为例,对01?的计算过程进行介绍。 (丄)快速平滑移动线(丑…八)是12日的,计算公式为: 2 11 今日2“入(口)X今日收盘价十X昨日2“入(口) (公慢速平滑移动平均线(丑―)是26日的,计算公式为: