状态反馈控制器设计习题
Chapter5 状态反馈控制器设计
控制方式有“开环控制”、“闭环控制”。“开环控制”就是把一个确定的信号(时间的函数)加到系统输入端,使系统具有某种期望的性能。然而,由于建模中的不确定性或误差、系统运行过程中的扰动等因素使系统产生一些意想不到的情况,这就要求对这些偏差进行及时修正,这就是“反馈控制”。在经典控制理论中,我们依据描述控制对象输入输出行为的传递函数模型来设计控制器,因此只能用系统输出作为反馈信号,而在现代控制理论中,则主要通过更为广泛的状态反馈对系统进行综合。
通过状态反馈来改变和控制系统的极点位置可使闭环系统具有所期望的动态特性。利用状态反馈构成的调节器,可以实现各种目的,使闭环系统满足设计要求。参见138P 例5.3.3,通过状态反馈的极点配置,使闭环系统的超调量%5≤p σ,峰值时间(超调时间)s t p 5.0≤,阻尼振荡频率10≤d ω。
5.1 线性反馈控制系统的结构与性质
设系统),,(C B A S =为 Bu Ax x
+= Cx y = (5-1)
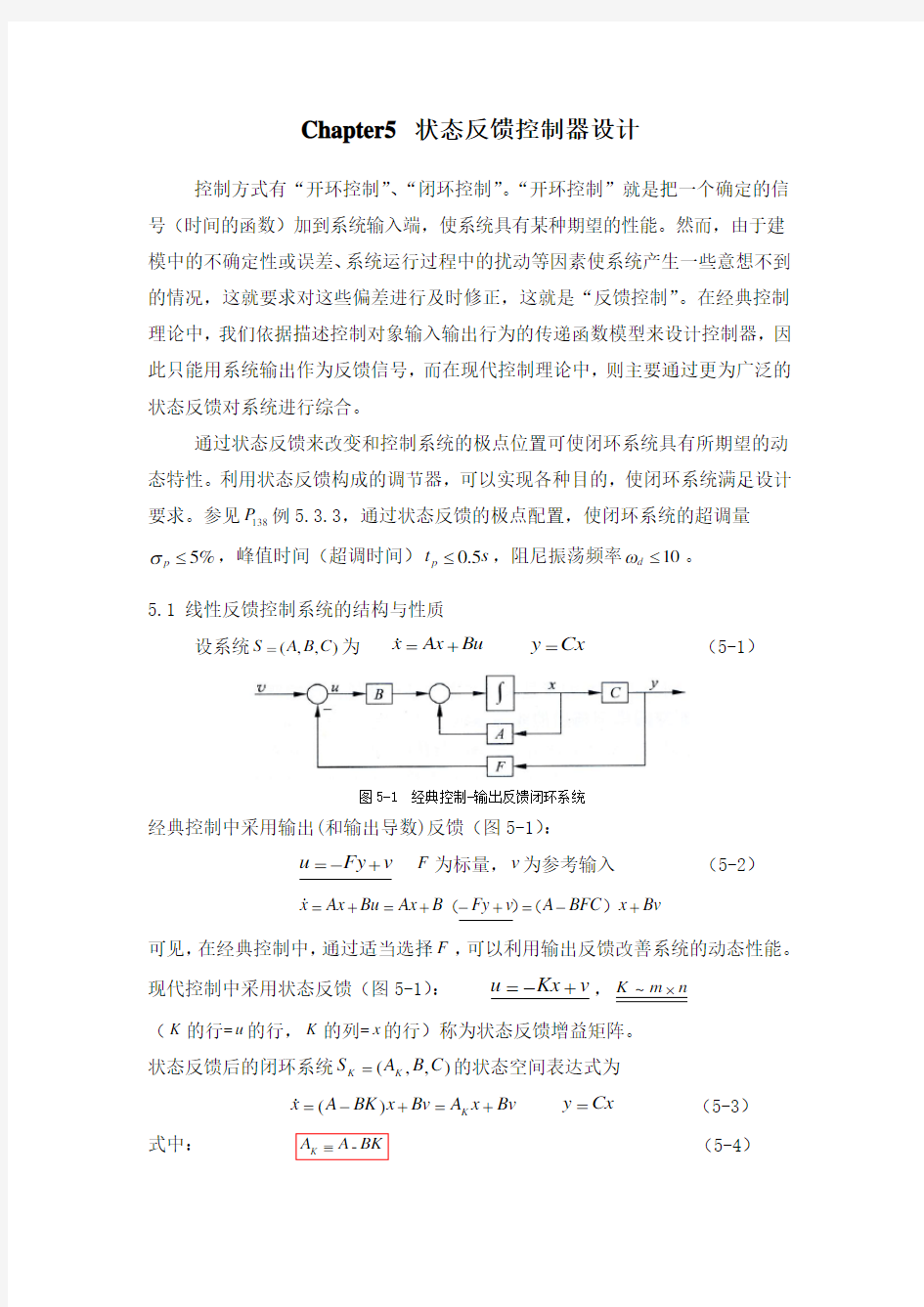
图5-1 经典控制-输出反馈闭环系统
经典控制中采用输出(和输出导数)反馈(图5-1): v Fy u +-= F 为标量,v 为参考输入 (5-2) Bv x BFC A v Fy B Ax Bu Ax x
+-=+-+=+=)()( 可见,在经典控制中,通过适当选择F ,可以利用输出反馈改善系统的动态性能。 现代控制中采用状态反馈(图5-1): v Kx u +-=,n m K ?~
(K 的行=u 的行,K 的列=x 的行)称为状态反馈增益矩阵。
状态反馈后的闭环系统),,(C B A S K K =的状态空间表达式为
Bv x A Bv x BK A x
K +=+-=)( Cx y = (5-3) 式中: BK A A K -≡ (5-4)
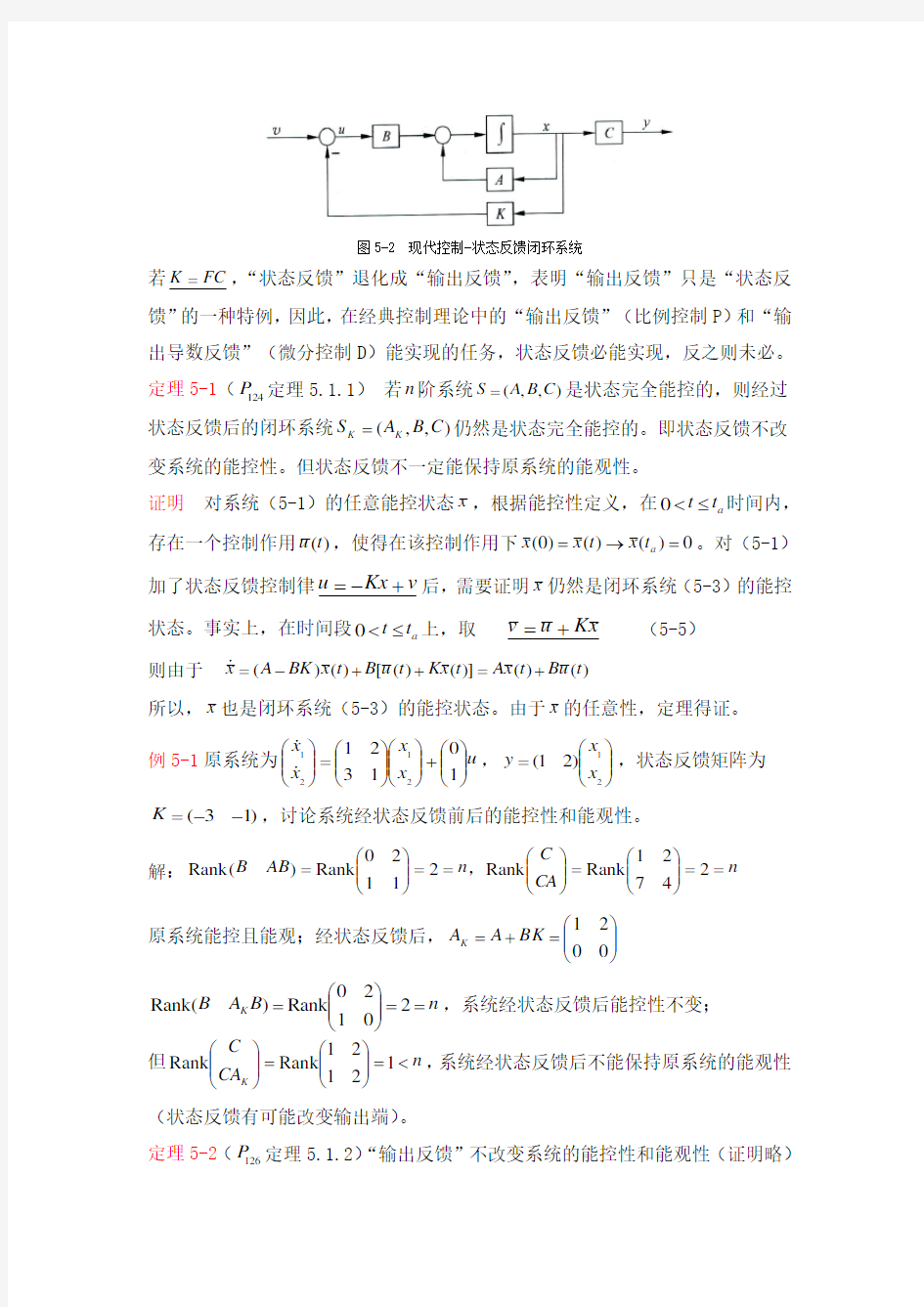
图5-2 现代控制-状态反馈闭环系统 若FC K =,“状态反馈”退化成“输出反馈”,表明“输出反馈”只是“状态反馈”的一种特例,因此,在经典控制理论中的“输出反馈”(比例控制P )和“输出导数反馈”(微分控制D )能实现的任务,状态反馈必能实现,反之则未必。 定理5-1(124P 定理5.1.1) 若n 阶系统),,(C B A S =是状态完全能控的,则经过状态反馈后的闭环系统),,(C B A S K K =仍然是状态完全能控的。即状态反馈不改变系统的能控性。但状态反馈不一定能保持原系统的能观性。
证明 对系统(5-1)的任意能控状态x ,根据能控性定义,在a t t ≤<0时间内,存在一个控制作用)(t u ,使得在该控制作用下0)()()0(=→=a t x t x x 。对(5-1)加了状态反馈控制律v Kx u +-=后,需要证明x 仍然是闭环系统(5-3)的能控状态。事实上,在时间段a t t ≤<0上,取 x K u v += (5-5)
则由于 )()()]()([)()(t u B t x A t x K t u B t x BK A x
+=++-= 所以,x 也是闭环系统(5-3)的能控状态。由于x 的任意性,定理得证。
例5-1原系统为u x x x x ???? ??+???? ?????? ??=???? ??1013212121 ,???
? ??=21)21(x x y ,状态反馈矩阵为 )13(--=K ,讨论系统经状态反馈前后的能控性和能观性。
解:n CA C n AB B ==???
? ??=???? ??==???? ??=24721Rank Rank 21120Rank )(Rank , 原系统能控且能观;经状态反馈后,???
? ??=+=0021BK A A K n B A B
K ==???
? ??=20120Rank )(Rank ,系统经状态反馈后能控性不变; 但n CA C K <=???? ??=???? ??12121Rank Rank ,系统经状态反馈后不能保持原系统的能观性(状态反馈有可能改变输出端)。
定理5-2(126P 定理5.1.2)
“输出反馈”不改变系统的能控性和能观性(证明略)
。
定理5-3(126P 定理5.1.3)对能控的单输入、单输出系统,
“状态反馈”不能移动系统的零点(证明见126P )
。 证明:系统传递函数为 B A sI C s G 1)()(--=,由于系统的能控性,状态空间模型
必能通过非奇异变换得到(等价于)能控标准型)~,~,~(C B A
??????? ??---=-110
...1...0000...10~n a a a A ,??????? ??=100~ B 由关系式 ??????
? ??+++=??????? ????????? ??+--=??????? ??------01111101...001...1...0000...11)~(a s a s s s a s a a s s s A sI n n n n n n )...(~011a s a s B n n n +++=--
可得 ??????
? ??+++=-----101111...1~)~(n n n n s s a s a s B A sI 由于等价的状态空间模型具有相同的传递函数,所以
B A sI
C a s a s c s c s c s s a s a s c c c B A sI C n n n n n n n n n n 1011011110111101)(...~~...~1...)~...~~(~)~(~-----------=++++++=??????
? ??+++=- (1) 采用状态反馈v x K u +-=~
~后,同理可得闭环系统的传递函数 )
(...)(~~...~~)]~~~([~0011101111k a s k a s c s c s c B K B A sI C n n n n n n ++++++++=-------- (2) 其中 ]...[~110-=n k k k K 。由(1)、(2)可知,状态反馈仅改变传递函数的分母多项式的系数(只改变系统的极点多项式),而不会改变分子多项式的系数。此时,只要不发生零极点相消的现象,状态反馈就不能改变零点。证毕。
5.2 稳定化状态反馈控制器的设计
稳定是一个系统正常运行的首要条件。若一个系统不稳定,则必须运用外部控制设法让其稳定。如何确定增益矩阵K ,使下面闭环系统是渐近稳定的? Bv x A Bv x BK A x
F +=+-=)( Cx y = (5-6) 根据Lyapunov 稳定性定理,系统(5-6)渐进稳定的充要条件是存在一个二次型的Lyapunov 函数Px x x V T =)(,其中P 是待定的对称正定矩阵。可以通过使标量函数Px x x V T =)(的时间导数是负定的来确定P 和K 。
5.2.1 Riccati 矩阵方程处理方法
这种方法可用来处理非线性系统、时滞系统等各类系统的镇定问题,也可用于鲁棒控制器的设计。
对标量函数Px x x V T =)(求时间导数:
PBu x Px B u x PA P A x x P x Px x t
x V T T T T T T T +++=+=)(d )(d (5-7) 应用P P =T 可知,后面两项“标量”相等
PBu x Px B u T T T = (5-8) 于是 PBu x x PA P A x t
x V T T T 2)(d )(d ++= (5-9) 若选取控制u 具有以下结构形式 Px kB u T -= 0>k (5-10) x P PBB kx PA P A x Px PBB kx x PA P A x t
x V T T T T T T T T )2-(2-)(d )(d +=+= (5-11) 进一步,选取矩阵P P =T 使其满足(Riccati 矩阵方程)
I P PBB kx PA P A T T T -=+2- (5-12) 则0d )(d <-=x x t
x V T ,满足渐进稳定的充要条件。 从(5-12)解出正定对称矩阵P P =T ,代入(5-10)就可得到控制规律。这种基于Riccati 矩阵方程(5-12)的稳定化控制器设计方法称为Riccati 矩阵方程处理方法。 若对给定的00>k ,Riccati 方程有一个正定对称解矩阵P ,则对任意的0k k ≥, x P PBB kx PA P A x t
x V T T T T )2-(d )(d +=
)2-(0<-=+≤x x x P PBB x k PA P A x T T T T T