高程测量方法

高程测量——水准测量
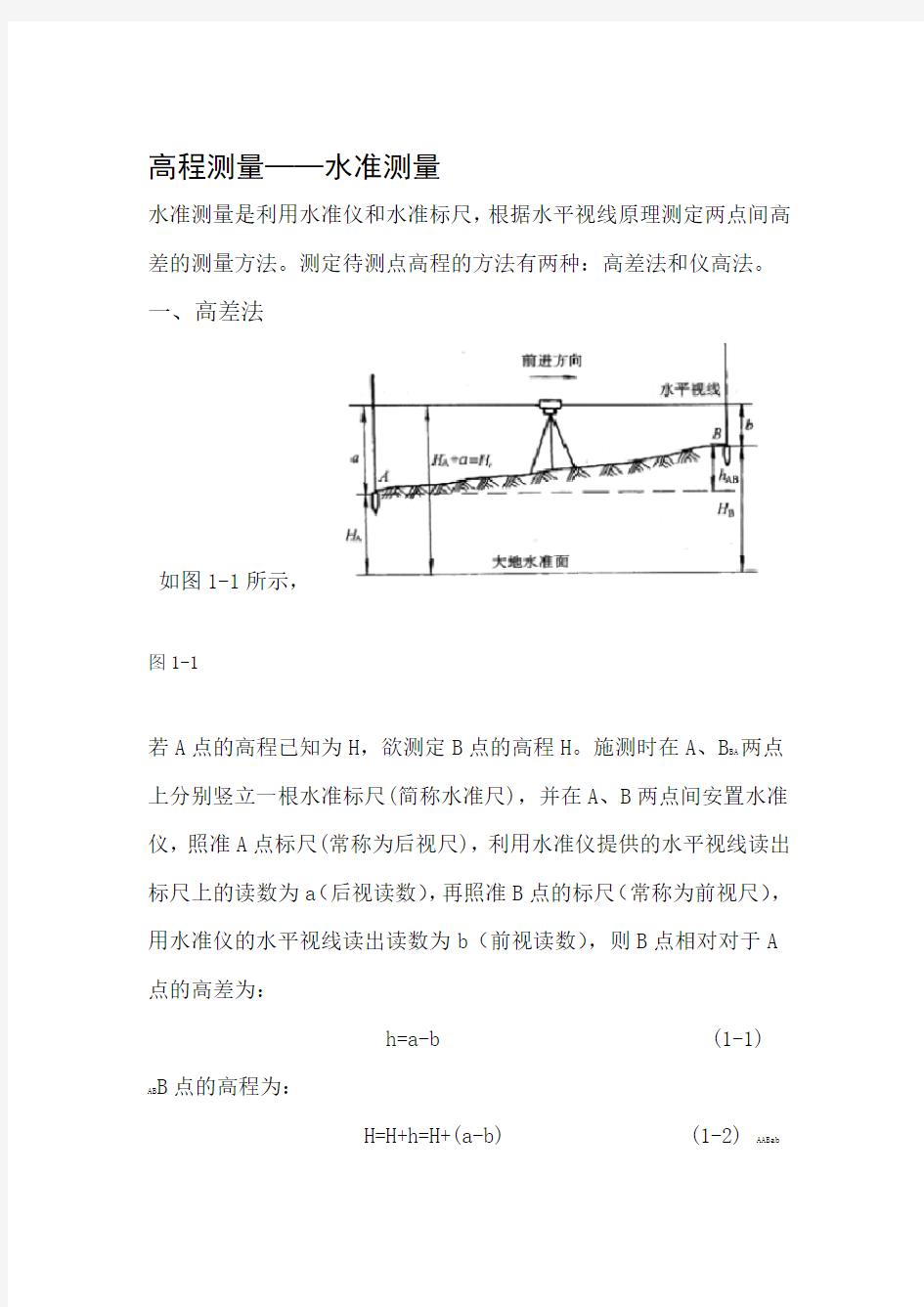
水准测量是利用水准仪和水准标尺,根据水平视线原理测定两点间高差的测量方法。测定待测点高程的方法有两种:高差法和仪高法。
一、高差法
如图1-1所示,
图1-1
若A点的高程已知为H,欲测定B点的高程H。施测时在A、B BA两点上分别竖立一根水准标尺(简称水准尺),并在A、B两点间安置水准仪,照准A点标尺(常称为后视尺),利用水准仪提供的水平视线读出标尺上的读数为a(后视读数),再照准B点的标尺(常称为前视尺),用水准仪的水平视线读出读数为b(前视读数),则B点相对对于A 点的高差为:
h=a-b (1-1)
AB B点的高程为:
H=H+h=H+(a-b) (1-2) AABab
在此施测过程中,A点为已知高程点,B点为待测定高程的点,测量
是由A点向B点为前进方向,故称A点为后视点,B点为前视点;由上述可知:测定待定点与已知点之间的高差,就可以求算得待定点的高程。
用文字表述(1-1)式,则为:两点间高差等于后视读数减去前视读数。相对来说,读数小表示地面点高,读数大表示地面点低。为此,高差有正,负之分;当h为正值时,即表示前视点B比后视点A AB专业文档供参考,如有帮助请下载。.
高;h为负值时,表示B点比A点低,计算高程时,高差应连同其符AB号一并运算。在书写h时.必须注意h的下标,h是表示R点相对
ABAB于A点的高差。若高差写作h,则表示A点相对于B点的高差。h ABBA 与h的绝对值是相等的,但符号相反。上述利用高差计算待测点高BA 程的方法,叫高差法。
二、仪高法
由图1-2可以看出,H是仪器水平视线的高程,通常叫视线高程i或仪器高程,简称仪高。前视点高程也可以通过仪高H求得。i
图1-2
仪高法的观测方法与高差法完全相同。计算时,先算出仪高H。i如图
1-2所示,仪高等于后视点高程加后视读数,即:
H=H+a (1-3) Ai则N 点、M点、B点的高程分别为:
H=H-n (1-4) iN H=H-m (1-5) iM H=H+a (1-6)
Ai用文字表示(1-4)式,则为:前视点高程等于仪高减去前视读数。仪
高法是计算次仪高,就可以简便地测算几个前视点的高程。因此,当
安置一次仪器,同时需要测出数个前视点的高程时,使用仪高法是比
较方便的。因此,在建筑上程测量中仪高法被广泛地应用。
这里需要注意:前视与后视的概念一定要弄清楚,不能误解为往前看
或往后看所得的尺读数。
专业文档供参考,如有帮助请下载。.
综上所述,高差法与仪高法都是利用水准仪提供的水平视线测定地面
点高程。如果视线不水平,上述公式不成立,测算将发生错误。因此,
望远镜视线水平是水准测量过程中要时刻牢记的关键操作。此外,施
测过程中,水准仪安置的高度对测算地面点高程并无影响。因此,只
要当水准仪的视线水平时,能在前、后视的标尺上读数即可。
专业文档供参考,如有帮助请下载。.
水准仪测量高程的方法和步骤
水准仪测量高程的方法和步骤 内容:理解水准测量的基本原理;掌握DS3 型微倾式水准仪、自动安平水准仪的构造特点、水准尺和尺垫;掌握水准仪的使用及检校方法;掌握水准测量的外业实施(观测、记录和检核)及内业数据处理(高差闭合差的调整)方法;了解水准测量的注意事项、精密水准仪和电子水准仪的构造及操作方法。 重点:水准测量原理;水准测量的外业实施及内业数据处理。 难点:水准仪的检验与校正。 §2.1 高程测量(Height Measurement )的概念 测量地面上各点高程的工作, 称为高程测量。高程测量根据所使用的仪器和施测方法的不同,分为: (1)水准测量(leveling) (2)三角高程测量(trigonometric leveling) (3)气压高程测量(air pressure leveling) (4)GPS 测量(GPS leveling) §2.2 水准测量原理 一、基本原理 水准测量的原理是利用水准仪提供的“水平视线”,测量两点间高差,从而由已知点高程推算出未知点高程。
a ——后视读数A ——后视点 b ——前视读数B ——前视点 1、A、B两点间高差: 2、测得两点间高差后,若已知A 点高程,则可得B点的高程:。 3、视线高程: 4、转点TP(turning point) 的概念:当地面上两点的距离较远,或两点的高差太大,放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。 二、连续水准测量
如图所示,在实际水准测量中,A 、B 两点间高差较大或相距较远,安置一次水准仪不能测定两点之间的高差。此时有必要沿A 、B 的水准路线增设若干个必要的临时立尺点,即转点(用作传递高程)。根据水准测量的原理依次连续地在两个立尺中间安置水准仪来测定相邻各点间高差,求和得到A 、B 两点间的高差值,有: h 1 = a 1 -b 1 h 2 = a 2 -b 2 …… 则:h AB = h 1 + h 2 +…… + h n = Σ h = Σ a -Σ b 结论:A 、B 两点间的高差等于后视读数之和减去前视读数之和。 § 2.3 水准仪和水准尺 一、水准仪(level) 如图所示,由望远镜、水准器和基座三部分组成。
三角高程测量原理
§5.9 三角高程测量 三角高程测量的基本思想是根据由测站向照准点所观测的垂直角(或天顶距)和它们之间的水平距离,计算测站点与照准点之间的高差。这种方法简便灵活,受地形条件的限制较少,故适用于测定三角点的高程。三角点的高程主要是作为各种比例尺测图的高程控制的一部分。一般都是在一定密度的水准网控制下,用三角高程测量的方法测定三角点的高程。 5.9.1 三角高程测量的基本公式 1.基本公式 关于三角高程测量的基本原理和计算高差的基本公式,在测量学中已有过讨论,但公式的推导是以水平面作为依据的。在控制测量中,由于距离较长,所以必须以椭球面为依据来推导三角高程测量的基本公式。 如图5-35所示。设0s 为B A 、两点间的实测水 平距离。仪器置于A 点,仪器高度为1i 。B 为照准 点,砚标高度为2v ,R 为参考椭球面上B A ''的曲率半径。AF PE 、分别为过P 点和A 点的水准面。PC 是PE 在P 点的切线,PN 为光程曲线。当位于P 点的望远镜指向与 PN 图5-35
相切的PM 方向时,由于大气折光的影响,由N 点出射的光线正好落在望远镜的横丝上。这就是说,仪器置于A 点测得M P 、间的垂直角为2,1a 。 由图5-35可明显地看出,B A 、 两地面点间的高差为 NB MN EF CE MC BF h --++==2,1 (5-54) 式中,EF 为仪器高NB i ;1为照准点的觇标高度2v ;而CE 和MN 分别为地球曲率和折光影响。由 2 021s R CE = 2021s R MN ' = 式中R '为光程曲线PN 在N 点的曲率半径。设 ,K R R =' 则 2 0202.21S R K S R R R MN ='= K 称为大气垂直折光系数。 由于B A 、两点之间的水平距离0s 与曲率半径R 之比值很小(当km s 100=时,0s 所对的圆心角仅5'多一点),故可认为PC 近似垂直于OM ,即认为 90≈PCM ,这样PCM ?可视为直角三角形。则(5-54)式中的MC 为 2,10tan αs MC = 将各项代入(5-54)式,则B A 、两地面点的高差为 2 12 02,1022 01202,102,121tan 221tan v i s R K s v s R K i s R s h -+-+=--++ =αα 令式中 C C R K ,21=-一般称为球气差系数,则上式可写成
全站仪三角高程测量方法
应用全站仪进行三角高程测量的新方 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 一、三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程H A, 只要知道A 点对B点的高差H AB 即可由H B =H A +H AB 得到B点的高程H B。 此主题相关图片如下: 图中:D为A、B两点间的水平距离а为在A点观测B点时的垂直角
i为测站点的仪器高,t为棱镜高 HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtanа) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气 折光的影响。为了确定高差h AB ,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D, 则h AB =V+i-t 故H B =H A +Dtanа+i-t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点: 1、全站仪必须架设在已知高程点上 2、要测出待测点的高程,必须量取仪器高和棱镜高。 二、三角高程测量的新方法 如果我们能将全站仪象水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知: H A =H B -(Dtanа+i-t) (2) 上式除了Dtanа即V的值可以用仪器直接测出外,i,t都是未知的。但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t值也固定不变。从(2)可知: H A +i-t=H B -Dtanа=W(3) 由(3)可知,基于上面的假设,H A +i-t在任一测站上也是固定不变的.而且可以计算出它的值W。 这一新方法的操作过程如下: 1、仪器任一置点,但所选点位要求能和已知高程点通视。 2、用仪器照准已知高程点,测出V的值,并算出W的值。(此时与仪
高层建筑垂直度、标高测量规范
【引用】建筑物垂直度、标高、全高测量记录 1.相关规范:《建筑变形测量规程》JGJ/T 8—97《工程测量规范》GB 50026—93。 2.在土木工程施工中,测量工作是贯穿整个施工过程各个阶段的基础性技术工作。施工测量工作的内容及其完成情况的准确程度,对工程能否顺利施工及其质量水平起着至关重要的作用。为此,国家颁布了系统的工程测量和施工验收规范、规程,以指导和规范工程测量技术工作。应高度的重视施工测量技术、测量管理。 3.施工测量的主要内容: (1)工程场地施工控制测量,主要包括建立建筑平面控制网和高程控制网。 (2)建筑主轴线测量及定位放线。 (3)主体施工测量,包括轴线投测及高程传递。高层(超高层)建筑物主体施工测量中的主要问题是控制垂直度,即是须将基准轴线准确地向高层引测,要求各层相应轴线位于同一竖直平面内。因此,控制轴线投测的竖向偏差,并使其偏差值不超过规范、规程允许的限值,是高层建筑施工测量中一件很重要的工作。 (4)建筑变形测量。其主要内容包括对建筑物实体的沉降观测、倾斜观测、位移观测及裂缝观测等。 (5)施工偏差检测。各种结构构件及建筑设备,其就位、垂
直度、标高等状态,难免会因施工及环境等原因出现偏差。因此,施工规范、规程及质量验评标准都规定了要对结构施工偏差情况进行检查,并规定了允许偏差值。 4.关于高层建筑施工竖向(垂直度)控制的规定要求。从以上对建筑施工测量有关内容分类可看出,对于建筑物施工过程,其施工过程的竖向(垂直度)控制,也即轴线投测的控制是非常重要的一环。轴线投测的准确度直接关系到建筑结构施工质量及安全性。对于超高层建筑物来讲尤其重要。因此,《高层建筑混凝土结构技术规程》(JGJ 3—2002)对高层建筑结构施工的测量放线作业及其允许误差作了明确的规定。其中第7.2.3条,规定了测量竖向垂直度时,必须根据建筑平面布置的具体情况确定若干竖向控制轴线,并应由初始控制线向上投测。对于轴线投测的误差,规定了层间测量偏差不应超过3mm;建筑全高垂直度测量偏差不应超过3H/10000(H为建筑总高度),且对应于不同高度范围的建筑物,其总高轴线投测偏差有不同的规定。因此,在工程施工过程中,必须要注意按这些规定的要求对轴线投测误差进行控制,并详细记录。另外,对于特别重要的超高层建筑来说,为避免由于测量仪器、手段、人为原因或环境原因出现总高度轴线投测误差过大,除了在首层±0.00处测定建筑物基准轴线外,有必要视情况采用专业的、精确的仪器及手段将建筑物总高分为若干轴线投测控制段,分段投测、分段
6高程测量方法
Unit 6 Methods of Elevation Determination(高程测量方法) An elevation is a vertical distance above or below a reference datum.(高程是高于或低于一个参考基准的一个垂直距离。) Although vertical distance can be referenced to any datum, in surveying, the reference datum that is universally employed is that of mean sea level (MSL).(虽然垂直距离可以参考任何一个基准,但是在测量上,这个参考基准一般使用【employ使用、雇佣】的是平均海平面(MSL)) MSL is assigned a vertical value (elevation) of 0.000 ft or 0.000 m.(MSL被赋予【assign】一个0.000英尺或0.000米的高程) All other points on the earth can be described by the elevations above or below zero.(地球上所有其它点可以用高于或低于0的高程来描述) Permanent points whose elevations have been precisely determined (benchmarks) are available in most areas for survey use.(高程精确测出的永久点(水准点)被用于【available可利用、可用到的】大多数区域的测量工作) In China, 7 years of observations at tidal stations in Qingdao from 1950 to 1956 were reduced and adjusted to provide the Huanghai vertical datum of 1956.(在中国,利用青岛验潮站【tidal stations in Qingdao】从1950年到1956年7年的观测数据处理【reduce处理、分析、减少】和平差,建立了56黄海高程系统) In the 1987, this datum was further refined to reflect long periodical ocean tide change to provide a new national vertical datum of 1985, according to the observations at tidal stations from 1952 to 1979.(1987年,在依照了【according to】验潮站1952到1979年的观测资料后,这个基准【56基准】被进一步精确【refine精确、精制v.】——反映长时期海潮变化的85国家高程基准建立起来。) Although, strictly speaking, the national vertical datum may not precisely agree with the MSL at specific points on the earth’s surface, the term MSL is generally used to describe the datum.(虽然,严格说来【strictly speaking】,国家高程基准在特殊的【specific特定的、特殊的】点上与MSL并不恰好【precisely】吻合,术语MSL一般【generally】还是用来描述它【国家高程基准】) MSL is assigned a vertical value (elevation) of 0.000 ft or 0.000 m.(MSL高程的赋值为0.000英尺或米)Difference in elevation may be measured by the following methods:(James M. Anderson and Edward M. Mikhail. 1998)(高程的差异【高差】可以由下列方法测得(詹姆斯.安德森和爱德华.???)) 1. Direct or spirit leveling, by measuring vertical distances directly.(水准测量【Direct leveling、spirit leveling都是水准测量的意思】,直接测得垂直距离【高程】) Direct leveling is most precise method of determining elevations and the one commonly used.(水准测量是高程测量方法中精度最高、使用最普遍的方法) 2. Indirect or trigonometric leveling, by measuring vertical angles and horizontal or slope distances.(三角高程测量,利用测量竖直角和水平或斜距来测高程) 3. Stadia leveling, in which vertical distances are determined by tacheometry using engineer’s transit and level rod; plane-table and alidade and level rod; or self-reducing tacheometer and level rod.(视距高程测量,利用视距测量【tacheometry】,使用工程经纬仪和水准尺;平板仪和照准仪和水准尺;或者自处理视距仪【tacheometer视距仪、准距仪】和水准尺测得垂直距离【高程】) 4. Barometric leveling, by measuring the differences in atmospheric pressure at various stations by means of a barometer.(气压水准测量【Barometric大气压力】,通过使用气压计【barometer】测量不同站点大气压力的差值来测高程) 5. Gravimetric leveling, by measuring the differences in gravity at various stations by means of a gravimeter for geodetic purposes.(重力水准测量,通过使用【by means of】重力计测量不同站点的重力值差值来测高程,用于大地测量学的目的) 6. Inertial positioning system, in which an inertial platform has tree mutually perpendicular axes, one of which is “up”, so that the system yields elevation as one of the outputs.(惯性定位系统,含有一个惯性平台,具有三个互相【mutually 相互地】垂直【perpendicular垂直的】轴,其中一个是“向上”的,所以这个系统产生【yield产生v.】的输出【output 输出n.】其中一个就是高程。) Vertical accuracies from 15 to 50 cm in distances of 60 and 100 km, respectively, have been reported.(各自地
平面及高程控制网复测方案
汉口至阳逻江北快速路(江岸段、黄陂段)工程八厂联防段、武湖街、花楼街段、沙口村段施工第一标段(二次公告)项目部 施 工 加 密 控 制 网 测 量 方 案 编制: 审核: 审批: 武汉市市政建设集团有限公司 编制日期:2016年6月
目录 第一章工程概况 (1) 第二章测区概况 (1) 第三章复测内容 (2) 3.1平面控制网的复测 (2) 3.2高程控制网的复测 (2) 3.3对控制网加密点联测 (2) 第四章导线已知控制点 (2) 第五章测量的技术依据 (3) 5.1测量技术依据 (3) 第六章人员及仪器的投入 (3) 6.1人员的组织 (3) 6.2设备的组织 (3) 第七章施工控制网复测 (4) 7.1平面控制 (4) 7.2高程控制 (6) 7.3控制点加密要求 (8)
第一章工程概况 江北快速路为城市快速路,项目线路经二七长江大桥、八厂联防段、朱家河、谌家矶段、新河、黄陂武湖段、新洲阳逻段,止点为余泊大道和柴泊大道交叉口,主路全长约27KM。而本项目路段为八厂联防段设计桩号范围为K1+610-K4+140,本路段主线全长2530m,均为路基。主路临江侧利用边坡平台设置防汛道路,长约2533m;局部设置防汛道路连接线通主路与防汛道路,防汛道路连接线共计2段,长约119m。本路段主要工程内容包括路线、路基、路面工程、闸口工程。 第二章测区概况 本项目为八厂联防路段,起点里程为K1+610,终点里程为K4+140,其中本标段内已知控制点四个分别为HY43、HY44、HY53、HY54,在本标段前后相接的其他标段,我们需要共同取1-2个控制点进行复测,控制点为HY42、HY45、HY51、HY52。其中在汛期内HY53和HY54处于江水侵泡状态,故对HY42、HY43、HY44、HY45、HY51、HY52控制点进行复测。 测量方法 平面到线加密测量精度统计 该段导线加密测量时,采取附和导线的测量方法,按四等精度要求进行。使用全站仪(科利达),仪器标称精度为1″、±1+1.5ppm。导线水平角度采用全测回法观测4个个测回;斜距及竖直角均往返对向观测3个测回,测距时在仪器内置入当时气象条件,取往返观测的平均值作为边长成果。导线平差计算之前,首先对导线的方位角闭合差、测角中误差、测距中误差、导线全长相对闭合差进行计算。当各项精度指标满足规范要求后,在进行严密平差计算。
建筑物垂直度标高全高测量记录(已填内容)
建筑物垂直度、标高、全高测量记录
注:垂直度测量平面示意图及偏差方向见背页 说 明 1. 超过允许偏差的偏差值在表中用~ ~标出; 2. 在备注栏中应注明建筑物标高、全高的设计值;每层所测的具体位置或轴线未描述清楚的也可在备注栏中标出或另外做出详细记录; 3. 主体结构验收前 , 应对建筑物每层楼面标高、各大角或转角垂直度进行测量;房屋竣工验收前,也应对各大角或转角垂直度进行测量,故本表每个工程均应有两张 。测量由监理单位会同施工单位进行, 测量数据作为验收的依据之一。 4. 砌体结构外墙垂直度全高查阳角,不应少于4处 , 每层每 20m 查一处;内墙按有代表性的 自然间抽 10%, 但不应少于3间 ,每间不应少于2处,柱不少于 5 根。混凝土结构按楼层、结构缝 或施工段划分检验批。在同一检验批中 , 对梁、柱 , 应抽查构件数量的 109 毛 , 且不少于 3 件 ; 对墙和板,应按有代表性的自然间抽查 10%, 且不少于3间;对大空间结构,墙可按相邻轴线间高度 5m 左右划分检查面,板可按纵横轴线划分检查面,抽查 10%, 且均不少于3面。
建筑物垂直度、标高、全高测量记录
注:垂直度测量平面示意图及偏差方向见背页 说明 1. 超过允许偏差的偏差值在表中用~~标出; 2. 在备注栏中应注明建筑物标高、全高的设计值;每层所测的具体位置或轴线未描述清楚的也可在备注栏中标出或另外做出详细记录; 3. 主体结构验收前, 应对建筑物每层楼面标高、各大角或转角垂直度进行测量;房屋竣工验收前,也应对各大角或转角垂直度进行测量,故本表每个工程均应有两张。测量由监理单位会同施工单位进行, 测量数据作为验收的依据之一。 4. 砌体结构外墙垂直度全高查阳角,不应少于4处, 每层每20m 查一处;内墙按有代表性的 自然间抽10%, 但不应少于3间,每间不应少于2处,柱不少于 5 根。混凝土结构按楼层、结构缝或施工段划分检验批。在同一检验批中, 对梁、柱, 应抽查构件数量的109 毛, 且不少于 3 件; 对墙
高速铁路二等高程控制网施工复测(可编辑修改word版)
高速铁路二等高程控制网施工复测 1.一般规定 1.1工程开工前,施工单位应会同设计单位参加由业主组织并有监理单位参与的控制桩和测量成果资料交接工作。 1.2施工单位应对设计单位交付的高程控制网进行同精度复测。 1.3为确保高速铁路轨道的线性,相邻施工标段、相邻施工单位之间应共同协商并现场确认交界处附近的同一个水准点作为搭接和公共点进行复测。双方应签订共用控制点协议并使用满足精度要求的相同高程成果。 1.4线下工程开工前或至迟在结构工程施工前应完成二等水准点的复测工作。 1.5高程复测应采用几何水准测量。 1.6高程控制网布网要求应按表1.6 规定执行。 表 1.6 控制网布网要求 1.8测量仪器的配置应符合下列规定。 水准仪标称精度应不低于DS1并应配相应的因瓦尺。 L 1.9当复测的水准基点间高差不符值二等超过6 时应再次测量确认;当核实复测精度符合相应等级要求后,应将复测成果报设计单位认定。满足精度要求时,应采用设计成果。 2.高程控制网复测 2.1二等水准基点的复测和加密测量可采用几何水准同时进行。 2.2高程控制网复测宜优先使用满足精度要求的电子水准仪。若采用补偿式自动安平水准仪时,其补偿误差△α不应超过0.2″,并应符合《国家一、二等水准测量规范》(GB/T 12897-2006)、《新建铁路工程测量规范》的相关规定。二等水准测量的主要技术标准应符
合表2.2-1 的规定。水准测量作业的主要技术要求应符合表 5.2-2 的规定。观测的读数限差应符合表5.2-3 规定。 表 2.2-1 水准测量主要技术标准 注:L 为往返测段、附合或环线的水准路线长度,单位为km。 表 2.2-2 水准测量作业的主要技术要求 2.3二等水准测量应进行测段往返观测。测站观测宜采用下列观测顺序: 往测:奇数站采用“后-前-前-后”,偶数站采用“前-后-后-前”。 返测:奇数站采用“前-后-后-前”,偶数站采用“后-前-前-后”。 由往测转向返测时,两根标尺应互换位置。 2.4二等水准测量观测读数和记录的数字取位: 表2.4.1 二等水准测量读数取位 仪器读数取位(mm) DS05 0.05 DS1 0.1 数字水准仪0.01 表 5.4.2 二等水准测量计算取位
工程测量中三角高程测量的误差分析及解决方法.doc
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 工程测量中三角高程测量的误差分析及解决方 法.doc 工程测量中三角高程测量的误差分析及解决方法摘要:通过对三角高程测量公式的分析,发现影响三角高程测量精度的因子,引进当下较为先进的设备与方法,从而提高三角高程测量的精度,使其可以替代几何水准测量。 该方法的实现可以弥补几何水准受地形条件等因素限制使工作效率慢,测绘成本高,人身、设备安全无法保障等缺点。 关键词: 三角高程测量;几何水准;误差分析;大气折光系数 1 引言一直以来,为保证精度,高等级高程测量都采用几何水准的方法。 而在某些特定环境下,几何水准往往会耗费大量的人力、物力,且受地形等条件因素影响较大!鉴于几何水准在某些特定情形下无法进行的问题,探讨如何提高三角高程测量的精度,以保证其测量成果的可行性和可靠性,使得三角高程测量成果足以替代几何水准。 随着高精度全站仪的问世,结合合理的方式、方法,运用三角高程替代几何水准测量是切实可行的。 三角高程代替几何水准可以解决跨河水准及高边坡、危险地段无法进行精密几何水准测量的难题,保障危险地段测量人员和仪器设备的安全,提高了工作效率,降低了测量成本。 2 三角高程测量误差分析常见的三角高程测量有单向 1 / 6
观测法、中间法和对象观测法,对向观测法可以消除部分误差,故在三角高程测量中采用较为广泛。 对向观测法三角高程测量的高差公式为: 式中: D 为两点问的距离;a 为垂直角;(k2-k1)为往返测大气垂直折光系数差;i 为仪器高;v 为目标高;R 为地球曲率半径(6370km);为垂线偏差非线性变化量;令。 对式(1)微分,则由误差传播定律可得高差中误差: (2)由式(2)可知影响三角高程测量精度主要有: 1.竖直角(或天顶距)、 2.距离、 3.仪器高、 4.目标高、 5.球气差。 第 1、2 项可以通过试验观测数据分析选择精度合适的仪器及其配套的反光棱镜、温度计、气压表等,我们选择的是徕卡 TCA2003 及其配套的单棱镜、国产机械通风干湿温度计、盒式气压计;第 3、4 项,一般要求建立稳定的观测墩和强制对中装置,采用游标卡尺在基座 3 个方向量取,使 3 个方向量取的校差小于 0.2mm,并在测前、测后进行 2 次量测;第 5 项球气差也就是大气折光差,也是本课题的研究重点。 3 减弱大气折光差的方法和措施大气折光差: 是电磁波经过大气层时,由于传播路径产生弯曲及传播速度发生变化而引起观测方向或距离的误差。 大气折光对距离的影响,表现在电磁波测距中影响的量值相对较
精密工程控制网测量复测方案
大连铁路枢纽改造工程SN2标段第二项目部精密工程控制测量网 复测方案 (DIK44+~DIK53+640) 编写: 复核: 批准: 中铁二十一局集团有限公司 大连铁路枢纽改造工程SN2标段第二项目部 二零一三年三月
目录 1.概述.................................................... 错误!未定义书签。 2.复测技术依据............................................ 错误!未定义书签。 3.已有成果资料............................................ 错误!未定义书签。 4.精测网复测内容及精度要求................................ 错误!未定义书签。复测工作内容........................................................ 错误!未定义书签。复测精度总体控制.................................................... 错误!未定义书签。复测的具体精度控制标准.............................................. 错误!未定义书签。 5.外业观测的实施.......................................... 错误!未定义书签。高程控制测量作业实施计划............................................ 错误!未定义书签。平面控制测量作业实施计划............................................ 错误!未定义书签。 6.精测网复测数据处理和平差方法............................ 错误!未定义书签。高程控制网复测数据处理和平差........................................ 错误!未定义书签。平面控制网复测数据处理和平差........................................ 错误!未定义书签。 7.问题处理与复测评判...................................... 错误!未定义书签。CPI控制网复测评判方法及标准......................................... 错误!未定义书签。CPII控制网复测评判方法及标准........................................ 错误!未定义书签。
三角高程测量
§4-6 三角高程测量 一、三角高程测量原理及公式 在山区或地形起伏较大的地区测定地面点高程时,采用水准测量进行高程测量一般难以进行,故实际工作中常采用三角高程测量的方法施测。 传统的经纬仪三角高程测量的原理如图4-12所示,设A点高程及AB两点间的距离已知,求B点高程。方法是,先在A点架设经纬仪,量取仪器高i;在B点竖立觇标(标杆), 并量取觇标高L,用经纬仪横丝瞄准其顶端,测定竖直角δ,则AB两点间的高差计算公式为: 故(4-11) 式中为A、B两点间的水平距离。 图4-12 三角高程测量原理 当A、B两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响,所加的改正 数简称为两差改正: 设c为地球曲率改正,R为地球半径,则c的近似计算公式为: 设g为大气折光改正,则g的近似计算公式为: 因此两差改正为:,恒为正值。 采用光电三角高程测量方式,要比传统的三角高程测量精度高,因此目前生产中的三角高程测量多采用光电法。
采用光电测距仪测定两点的斜距S,则B点的高程计算公式为: (4-12) 为了消除一些外界误差对三角高程测量的影响,通常在两点间进行对向观测,即测定hAB 和hBA,最后取其平均值,由于hAB和hBA反号,因此可以抵销。 实际工作中,光电三角高程测量视距长度不应超过1km,垂直角不得超过15°。理论分析和实验结果都已证实,在地面坡度不超过8度,距离在1.5km以内,采取一定的措施,电磁波测距三角高程可以替代三、四等水准测量。当已知地面两点间的水平距离或采用光电三角高程测量方法时,垂直角的观测精度是影响三角高程测量的精度主要因素。 二、光电三角高程测量方法 光电三角高程测量需要依据规范要求进行,如《公路勘测规范》中光电三角高程测量具体要求见表4-6。 表4-6 光电三角高程测量技术要求 往返各 注:表4-6中为光电测距边长度。 对于单点的光电高程测量,为了提高观测精度和可靠性,一般在两个以上的已知高程点上设站对待测点进行观测,最后取高程的平均值作为所求点的高程。这种方法测量上称为独立交会光电高程测量。 光电三角高程测量也可采用路线测量方式,其布设形式同水准测量路线完全一样。 1.垂直角观测 垂直角观测应选择有利的观测时间进行,在日出后和日落前两小时内不宜观测。晴天观测时应给仪器打伞遮阳。垂直角观测方法有中丝法和三丝法。其中丝观测法记录和计算见表4-7。表4-7 中丝法垂直角观测表 点名泰山等级四等 天气晴观测吴明 成像清晰稳定仪器Laica 702 全站仪记录李平 仪器至标石面高1.553m 1.554 平均值1.554m 日期2006.3.1
给排水管道工程高程测量计算方法
给排水管道高程测量计算方式 一、主管、主井: 1、原地面高程:施工图纸上有,没有的由施工员提供。 2、基底高程:管内底标高-垫层-管壁厚。检查井基底=设计给的井底标高-垫层-底板。 3、垫层高程:参照图集,看多大的管子是多厚的垫层,再在基底高程上加上垫层的厚度。 4、管道基础:看设计图纸要求的是多少度的基础。比如180°砂砾石基础,D800的管子,就需要在垫层的高程上加上480mm(管子的一半加壁厚)。 5、管道铺设就抄管内底标高,图纸上有。 6、管道回填:看回填到哪个位置,一般设计要求管顶50cm填砂砾石,做一次回填。以上至结构层下填素土,做一次回填资料。如都是填砂砾石,就做一次回填就好。填筑顶面:管顶50cm就需在垫层的高程基础上+管子大小+两个壁厚+50cm。填到结构层下的填筑顶面:路中设计顶标高-结构层厚度。回填深度:填筑顶面标高-基底高程。 7、检查井回填:看设计要求井室周围用什么土质的材料填多宽。填筑顶面标高:设计给的井底标高+埋深深度-结构层厚度。回填深度:填筑顶面标高-基底高程。 二、支管、支井: 1、原地面高程:由施工员提供。 2、基底高程:=支管管内底标高-垫层-壁厚(设计图纸上给的支管管
内底标高是指接入主井内支管的管内底标高),接入支井内的支管管内底标高=设计图纸上给的支管管内底标高+支管长度*坡度(支井向主井流水的加,主井向支井流水的减)。管内底标高-垫层-管壁厚=基底高程。检查井基底=设计给的井底标高-垫层-底板。 3、垫层高程:参照图集,看多大的管子是多厚的垫层,再在基底高程上加上垫层的厚度。 4、管道基础:看设计图纸要求的是多少度的基础。比如180°砂砾石基础,D800的管子,就需要在垫层的高程上加上480mm(管子的一半加壁厚)。 5、管道铺设就抄管内底标高,图纸上有。 6、管道回填:看回填到哪个位置,一般设计要求管顶50cm填砂砾石,做一次回填。以上至结构层下填素土,做一次回填资料。如都是填砂砾石,就做一次回填就好。填筑顶面:管顶50cm就需在垫层的高程基础上+管子大小+两个壁厚+50cm。填到结构层下的填筑顶面:路中设计顶标高-结构层厚度。 7、检查井回填:看设计要求井室周围用什么土质的材料填多宽。填筑顶面标高:设计给的井底标高+埋深深度-结构层厚度(若支井在道路外面,不存在结构层就不需要减结构层厚度)。回填深度:填筑顶面标高-基底高程。
控制测量学高程控制网的布设
高程控制网的布设 5.2.1 国家高程控制测量 国家高程控制测量主要是用水准测量方法进行国家水准网的布测。国家水准网是全国范围内施测各种比例尺地形图和各类工程建设的高程控制基础,并为地球科学研究提供精确的高程资料,如研究地壳垂直形变的规律,各海洋平均海水面的高程变化,以及其他有关地质和地貌的研究等。 国家水准网的布设也是采用由高级到低级、从整体到局部逐级控制、逐级加密的原则。国家水准网分4个等级布设,一、二等水准测量路线是国家的精密高程控制网。一等水准测量路线构成的一等水准网是国家高程控制网的骨干,同时也是研究地壳和地面垂直运动以及有关科学问题的主要依据,每隔15~20年沿相同的路线重复观测一次。构成一等水准网的环线周长根据不同地形的地区,一般在1 000~2000km之间。在一等水准环内布设的二等水准网是国家高程控制的全面基础,其环线周长根据不同地形的地区在500~750km之间。一、二等水准测量统称为精密水准测量。 我国一等水准网由289条路线组成,其中284条路线构成100个闭合环,共计埋设各类标石近2万余座。全国一等水准网布设略图如图5-2所示。 图5-2 二等水准网在一等水准网的基础上布设。我国已有1 138条二等水准测量路线,总长为13.7万公里,构成793个二等环。 三、四等水准测量直接提供地形测图和各种工程建设所必须的高程控制点。三等水准测量路线一般可根据需要在高级水准网内加密,布设附合路线,并尽可能互相交叉,构成闭合环。单独的附合路线长度应不超过200km;环线周长应不超过300km。四等水准测量路线一般以附合路线布设于高级水准点之间,附合路线的长度应不超过80km。
三角高程测量误差分析报告(精)
三角高程测量 1 三角高程测量的基本原理 三角高程测量是通过观测两点间的水平距离和天顶距(或高度角)求定两点间的高差的方法。它观测方法简单,不受地形条件限制,是测定大地控制点高程的基本方法。目前,由于水准测量方法的发展,它已经退居次要位置,但在山区和丘陵地带依然被广泛采用。 在三角高程测量中,我们需要使用全站仪或者经纬仪测量出两点之间的距离(水平距离或者斜距和高度角,以及测量时的仪器高和棱镜高,然后根据三角高程测量的公式推算出待测点的高程。三角高程测量 由图中各个观测量的表示方法,AB两点间高差的公式为: H=S0tanα+i1-i2① 但是,在实际的三角高程测量中,地球曲率、大气折光等因素对测量结果精度的影响非常大,必须纳入考虑分析的范围。因而,出现了各种不同的三角高程测量方法,主要分为:单向观测法,对向观测法,以及中间观测法。 1.1 单向观测法 单向观测法是最基本最简单的三角高程测量方法,它直接在已知点对待测点进行观测,然后在①式的基础上加上大气折光和地球曲率的改正,就得到待测点的高程。这种方法操作简单,但是大气折光和地球曲率的改正不便计算,因而精度相对较低。 1.2 对向观测法 对向观测法是目前使用比较多的一种方法。对向观测法同样要在A点设站进行观测,不同的是在此同时,还在B点设站,在A架设棱镜进行对向观测。从而 就可以得到两个观测量:直觇:
h AB= S往tanα往+i往-v往+c往+r往② 反觇: h BA= S返tanα返+i返-v返+c返+r返③ S——A、B间的水平距离; α——观测时的高度角; i——仪器高; v——棱镜高; c——地球曲率改正; r——大气折光改正。 然后对两次观测所得高差的结果取平均值,就可以得到A、B两点之间的高差值。由于是在同时进行的对向观测,而观测时的路径也是一样的,因而,可以认为在观测过程中,地球曲率和大气折光对往返两次观测的影响相同。所以在对向观测法中可以将它们消除掉。 h=0.5(hAB- hBA =0.5[( S往tanα往+i往-v往+c往+r往-( S返tanα返+i返-v返+c返+r返] =0.5(S 往tanα往-S返tanα返+i往-i返+v返-v往④ 与单向观测法相比,对向观测法不用考虑地球曲率和大气折光的影响,具有明显的优势,而且所测得的高差也比单向观测法精确。 1.3 中间观测法 中间观测法是模拟水准测量而来的一种方法,它像水准测量一样,在两个待测点之间架设仪器,分别照准待测点上的棱镜,再根据三角高程测量的基本原理,类似于水准测量进行两待测点之间的高差计算。此种方法要求将全站仪尽量架设在两个待测点的中间位置,使前后视距大致相等,在偶数站上施测控制点,从而有效地消除大气折光误差和前后棱镜不等高的零点差,这样就可以像水准测量一样将地球曲率的影响降到最低。而且这种方法可以不需要测量仪器高,这样在观测时可以相对简单些,而且减少了一个误差的来源,提高观测的精度。全站仪中间观测法三角高程测量可代替三、四等水准测量。在测量过程中,应选择硬地面作转点,用对中脚架支撑对中杆棱镜,棱镜上安装觇牌,保持两棱镜等高,并轮流作为前镜和后镜,同时将测段设成偶数站,以消除两棱镜不等高而产生的残余误差影响。
测量控制网复测方案
目录 1、工程概况 (2) 2、编制依据 (2) 3、工作要求 (2) 4、起算数据 (2) 5、坐标及高程系统 (2) 6、人员配置与仪器设备 (2) 7、技术要求 (4) 8、导线网与水准网复测实施 (5) 9、控制测量成果表、技术结论 (5)
1、工程概况 2、编制依据 2.1《工程测量规范》 GB50026-2007; 2.2《城市测量规范》 CJJ/T8-2011。 3、工作要求 根据佛山市《施工测量管理办法》要求,对本工程施工控制点进行定期复测,包括导线点和水准点。本次测量从2020年2月23日至2020年2月25日完成外业测量及数据内业计算。 4、起算数据 以已知点M1、M2为依据,复测平面控制为闭合导线,起始边以M1、M2,终边M2、M1,经点J1、J2、J3-1。平面控制网用按照国家四等的要求测设,起算数据均为首级交桩点。 复测水准线路走向为:以M1为起算高程,做闭合水准测量,水准测量用四等水准要求测设。 5、坐标及高程系统 本次复测所采用的坐标及高程系统,与施工所提供的坐标及高程系统相一致。 5.1平面坐标系统 平面佛山市2000坐标系统。 5.2高程系统 1985国家高程系统。 6、人员配置与仪器设备 6.1人员配置 参加此次控制测量的主要人员有:
6.2仪器设备 本次控制测量使用的仪器情况见下表:
7、技术要求 7.1四等导线测量主要技术要求 7.2方向观测法水平角观测技术要求 7.3距离测量限差技术要求 量值。 7.4四等水准测量主要技术要求
7.5水准测量观测的视线长度、视距差、视线高度的要求 8、导线网与水准网复测实施 8.1四等导线网的复测 采用拓普康GTS-102N进行观测,仪器经测绘仪器计量定点单位检定合格,并在有效期内,仪器检定证书见附件,导线控制网内业数据计算见附件。 8.2四等水准的复测 采用DS320进行观测,仪器经测绘仪器计量定点单位检定合格,并在有效期内,仪器检定证书见附件,高程控制网内业数据计算见附件。 9、控制测量成果表、技术结论 本次复测按照《工程测量规范》 GB 50026-2007,《城市测量规范》 CJJ/T8-2011执行,观测方案合理,外业观测严谨,各项限差满足规范要求;资料齐全,整饰美观;起算数据来源可靠,数据处理方法正确,成果质量满足规范及有关技术要求。具体成果表见附件。