太阳能槽式聚光反射镜自动跟踪装置
太阳能槽式聚光反射镜自动跟踪装置3
徐丽霜, 李 明, 魏生贤, 周希正
(云南师范大学物理与电子信息学院,云南昆明650092)
摘 要: 在分析太阳运行规律的基础上,提出一种太阳跟踪的新方案。描述了槽式聚光反射镜自动跟踪装置的机械结构及跟踪控制的原理、方法,给出具体应用实例。槽式聚光装置的应用前景十分广泛,可用于太阳能制冷、供暖、海水淡化等各种生产、生活领域。
关 键 词: 槽式聚光反射镜;太阳能自动跟踪;机械结构;自动控制
中图分类号: T K513.4 文献标识码: A 文章编号: 1007-9793(2006)01-0030-04
能源是人类社会赖以生存和发展的物质基础。当前,包括我国在内的绝大多数国家都以石油、天然气和煤炭等矿物燃料为主要能源。随着地球人口的增长、矿物燃料的日益枯竭和全球环境的不断恶化,利用太阳能已成为人们研究的热点问题之一。但太阳能是一种能流密度低、辐射具有间歇性、空间分布又不断变化的能源,与常规能源有很大的区别,这就对太阳能的收集和利用提出更高的要求。目前被广泛应用的太阳能热水器即使采用真空热管技术,夏天也只能达到70~90℃,冬天只有40~50℃,这个温度范围只能用于家庭淋浴,无法提供工业上广泛应用的200~300℃的热蒸汽。为有效地提高太阳能能流密度,需采用聚焦、跟踪技术,其关键装置就是聚光器、跟踪传动机构、自动控制系统。本文在探讨了太阳辐射的理论基础上,设计出一种利用电机驱动聚光器定时跟踪太阳的装置,以期解决太阳能利用中能流密度低的问题。
1 自动跟踪装置的结构和工作原理
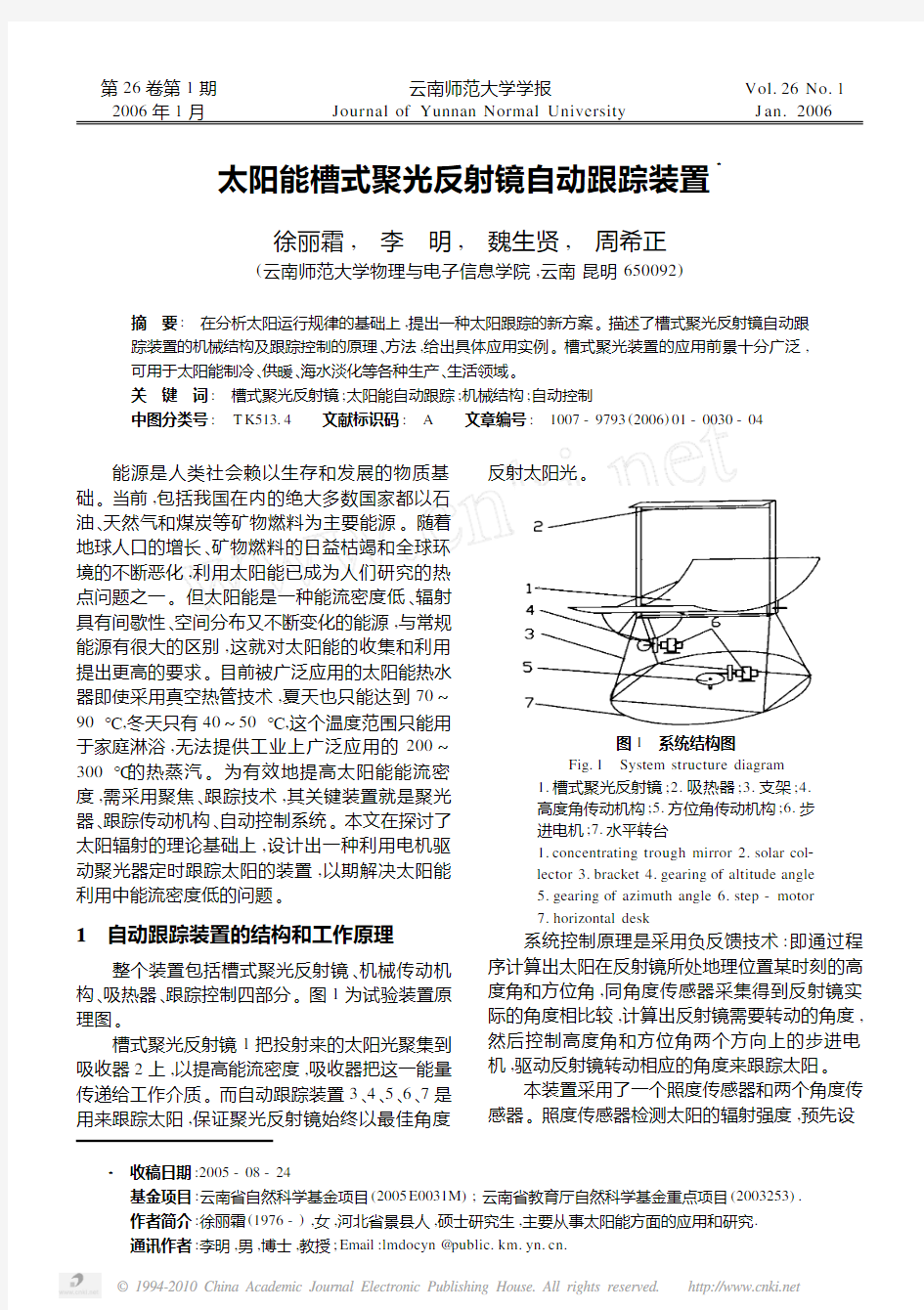
整个装置包括槽式聚光反射镜、机械传动机构、吸热器、跟踪控制四部分。图1为试验装置原理图。
槽式聚光反射镜1把投射来的太阳光聚集到吸收器2上,以提高能流密度,吸收器把这一能量传递给工作介质。而自动跟踪装置3、4、5、6、7是用来跟踪太阳,保证聚光反射镜始终以最佳角度反射太阳光
。
图1 系统结构图
Fig.1 System structure diagram
1.槽式聚光反射镜;
2.吸热器;
3.支架;
4.
高度角传动机构;5.方位角传动机构;6.步
进电机;7.水平转台
1.concentrating trough mirror
2.solar col2
lector3.bracket4.gearing of altitude angle
5.gearing of azimuth angle
6.step-motor
7.horizontal desk
系统控制原理是采用负反馈技术:即通过程序计算出太阳在反射镜所处地理位置某时刻的高度角和方位角,同角度传感器采集得到反射镜实际的角度相比较,计算出反射镜需要转动的角度,然后控制高度角和方位角两个方向上的步进电机,驱动反射镜转动相应的角度来跟踪太阳。
本装置采用了一个照度传感器和两个角度传感器。照度传感器检测太阳的辐射强度,预先设
第26卷第1期
2006年1月
云南师范大学学报
Journal of Yunnan Normal University
Vol.26No.1
J an.2006
3收稿日期:2005-08-24
基金项目:云南省自然科学基金项目(2005E0031M);云南省教育厅自然科学基金重点项目(2003253).
作者简介:徐丽霜(1976-),女,河北省景县人,硕士研究生,主要从事太阳能方面的应用和研究.
通讯作者:李明,男,博士,教授;Email:lmdocyn@https://www.360docs.net/doc/53316747.html,.
定一个工作辐照强度值,当检测到的太阳辐照度低于此设定值时,控制单元不工作;当高于此设定值时,控制单元开始工作。角度传感器则用来分别检测反射镜实际的高度角和方位角。
高度角跟踪机构的作用是让反射镜绕俯仰轴旋转,以跟踪太阳的高度角,一般而言,就是从东向西转动。方位角跟踪机构的作用是让反射镜绕方位轴旋转,它的旋转平面是水平面。
2 地球绕太阳运行的规律及太阳角的计算2.1地球公转和自转、赤纬
地球绕太阳的公转轨道为椭圆形,太阳为焦
点之一,近日点是1月3日,远日点是7
月4日。
公转一周需365.25天,将360°作24等分,每15°为一个节气,共24个节气。
地球自转轴与公转平面呈66°33′的夹角,且朝向不变。地球自转一周为24小时,所以地球每小时自转15°,自转过程中总有半个球面朝向太阳,另半个背向太阳,形成昼夜[1]。
太阳直射点就是太阳光线与地平面的垂直交点。赤纬就是太阳直射点所处的纬度,用δ表示。它是随季节不断变化的。由于自转轴与公转平面不垂直,且倾斜方向不变,使得太阳直射点变动于南北回归线之间,即:-23°27′≤δ≤23°27′。每日的δ值可查天文年历,也可以用以下式子计算[2]:
δ=23.45sin360(N+284)
365
其中N为日序,δ的单位为度。
2.2太阳高度角、方位角
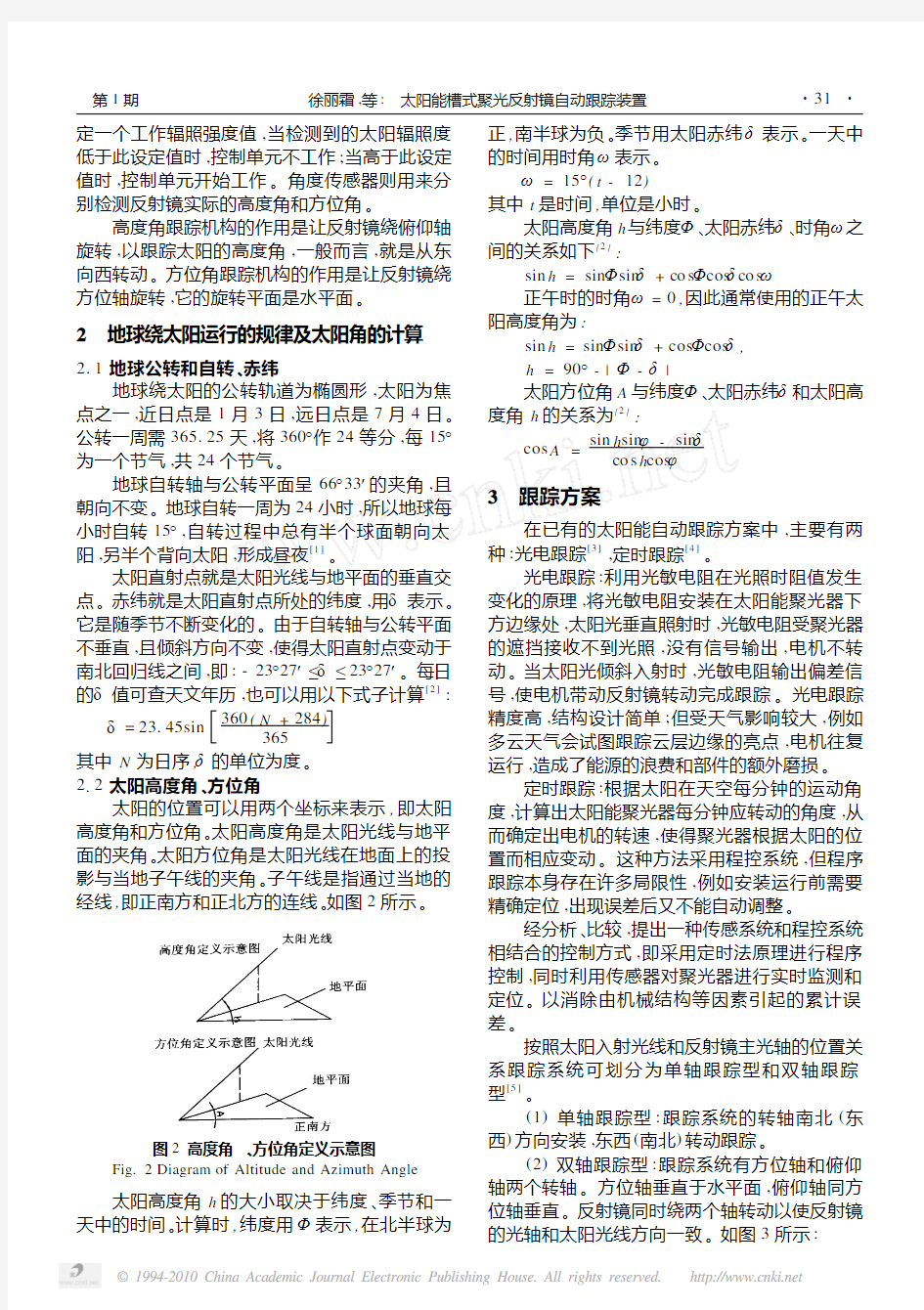
太阳的位置可以用两个坐标来表示,即太阳高度角和方位角。太阳高度角是太阳光线与地平面的夹角。太阳方位角是太阳光线在地面上的投影与当地子午线的夹角。子午线是指通过当地的经线,即正南方和正北方的连线。如图2所示。
图2 高度角、方位角定义示意图
Fig.2Diagram of Altitude and Azimuth Angle
太阳高度角h的大小取决于纬度、季节和一天中的时间。计算时,纬度用Φ表示,在北半球为正,南半球为负。季节用太阳赤纬δ表示。一天中的时间用时角ω表示。
ω=15°(t-12)
其中t是时间,单位是小时。
太阳高度角h与纬度Φ、太阳赤纬δ、时角ω之间的关系如下[2]:
sin h=sinΦsinδ+co sΦcosδco sω
正午时的时角ω=0,因此通常使用的正午太阳高度角为:
sin h=sinΦsinδ+cosΦcosδ,
h=90°-|Φ-δ|
太阳方位角A与纬度Φ、太阳赤纬δ和太阳高度角h的关系为[2]:
cos A=
sin h sinφ-sinδ
co s h cosφ
3 跟踪方案
在已有的太阳能自动跟踪方案中,主要有两种:光电跟踪[3],定时跟踪[4]。
光电跟踪:利用光敏电阻在光照时阻值发生变化的原理,将光敏电阻安装在太阳能聚光器下方边缘处,太阳光垂直照射时,光敏电阻受聚光器的遮挡接收不到光照,没有信号输出,电机不转动。当太阳光倾斜入射时,光敏电阻输出偏差信号,使电机带动反射镜转动完成跟踪。光电跟踪精度高,结构设计简单;但受天气影响较大,例如多云天气会试图跟踪云层边缘的亮点,电机往复运行,造成了能源的浪费和部件的额外磨损。
定时跟踪:根据太阳在天空每分钟的运动角度,计算出太阳能聚光器每分钟应转动的角度,从而确定出电机的转速,使得聚光器根据太阳的位置而相应变动。这种方法采用程控系统,但程序跟踪本身存在许多局限性,例如安装运行前需要精确定位,出现误差后又不能自动调整。
经分析、比较,提出一种传感系统和程控系统相结合的控制方式,即采用定时法原理进行程序控制,同时利用传感器对聚光器进行实时监测和定位。以消除由机械结构等因素引起的累计误差。
按照太阳入射光线和反射镜主光轴的位置关系跟踪系统可划分为单轴跟踪型和双轴跟踪型[5]。
(1)单轴跟踪型:跟踪系统的转轴南北(东西)方向安装,东西(南北)转动跟踪。
(2)双轴跟踪型:跟踪系统有方位轴和俯仰轴两个转轴。方位轴垂直于水平面,俯仰轴同方位轴垂直。反射镜同时绕两个轴转动以使反射镜的光轴和太阳光线方向一致。如图3所示:
?
1
3
?
第1期徐丽霜,等: 太阳能槽式聚光反射镜自动跟踪装置
图3 跟踪方式示意图Fig.3 Diagram of Tracking Modes
双轴跟踪时吸收器收集到的能量最大,反射
镜的光学性能也最好。因此本装置采用双轴跟踪型。
4 传动结构
本装置传动结构分为水平转台和垂直转台即
方位角传动机构和高度角传动机构两部分。高度角传动机构流程为:步进电机-减速器-齿轮-反射镜。方位角传动机构流程为:步进电机-减速器-水平转台-反射镜。
由前面太阳运行规律的分析计算可知:太阳高度角一天内的变化范围为0°~180°。由日序、赤纬角以及当地的纬度可计算出反射镜从上午9点到下午5点之间需要转动的范围为140度左右。因此传动机构选用两相步进电机(保持转矩7.6Nm ,步距角1.8度),精密行星齿轮减速器传动比1:25,驱动器选用4细分,则电机转动100°,反射镜相应转动1°。步进电机步距角为1.8°/4=0.45°,故反射镜每转动1°时,控制卡需发脉冲100/0.45个脉冲。同样,在方位角传动机构上,假如太阳实际方位角与传感器测得的反射镜的方位角的差值为а度,减速器传动比为150:1,则每天就需要给方位角步进电机发送150а/0.45个脉冲。
5 控制系统
5.1控制系统硬件组成
太阳能聚光反射装置的自动跟踪系统主要由传感器单元、PC 控制单元、执行机构、电源组成,其中执行机构由步进电机和传动机构组成。跟踪系统的结构如图4所示。
本装置通过PC 机直接读取系统相关参数、
控制自动跟踪系统。利用两轴PC 控制卡发送脉冲分别控制高度角步进电机和方位角步进电机。具体实现如下
:
图4 跟踪系统原理方框图
Fig.4 Block Diagram of the Tracking System
(1)通过pc 机利用vb 编制程序,计算出反射镜所在地理位置某一时刻的高度角和方位角,和传感器采集得到的反射镜实际的角度比较,计算出需要转动的角度,对电机控制卡进行读写操作,向控制卡发送位置、速度、加速度命令。
(2)控制卡根据主机的命令产生脉冲序列发
送给电机驱动器。
(3)步进电机驱动器根据接收到的脉冲信号,产生多拍节驱动信号控制步进电机旋转。
(4)电机通过减速器驱动负载转动相应角度。
5.2控制系统软件设计
控制流程图如图5所示:系统控制流程说明如下:
系统开机启动,初始化设备和相关参数后,首先读取时钟芯片得到系统日期和时间,如果时间在上午9点和下午17点之间,系统正常工作;在下午17点时,反射镜复位到平衡位置;在下午17点到上午9点之间,系统一直保持在平衡位置。
通过光照传感器采集光照强度,以判断是否阴天,有云或者其它遮盖,如果采集到的光强小于系统的设定值(该值可以通过PC 机控制界面直接查看和修改),则系统等待10分钟(该值可以通过PC 机控制界面直接查看和修改)之后再继续采集、判断。当采集到的光强大于系统设定值,则程序往下运行。
系统根据读取的时钟时间和上次存放在系统RAM 中的相应值进行比较,以判断是否超过6分钟(该值可以通过PC 机控制界面直接查看和
?
23?云南师范大学学报(自然科学版)
第26卷
修改),如果是,将这个时间存放到系统中,更新原来的相应数值。系统按照程序计算当时的太阳高度角,通过和传感器采集得到的实际高度角进行比较,根据得到的差值的正负来判断步进电机的转动方向,根据数值大小和传动系统的传动比,计算出高度角步进电机所需的脉冲数。如果没过6分钟,那么程序往下运行。方位角的控制与高度角类似。
系统每隔5分钟(该值可以通过PC 机控制界面查看和修改)循环一次
。
图5 控制系统软件流程图
Fig.5 Flow Char Tracking Program
由于影响跟踪精度的因素很多,与当地的纬度、太阳赤纬角、时角以及步进电机的精度和跟踪传动的机械机构有关,所以需要对系统的相关控制参数进行校正。校正采用手动操作,通过不断观察罗盘日晷的影子,来调整反射镜的角度,记录电机的实际脉冲数,与程序计算的理论脉冲数相比较得到校正值。另外本系统采用PC 机控制,可以直接通过输入(键盘)、输出(界面显示)接口,在装置运行过程中对传感器采集的时间间隔等参数进行调整。
6 结 论
本文所设计的太阳能自动跟踪装置,具有设计合理、制作简单、成本低、实用性强等特点。结合试验工作的进一步开展,将不断完善设计参数,为太阳能槽式聚光集热装置在生产、生活中的应用开辟新的渠道。参 考 文 献:
[1] 谈小生,葛成辉.太阳角的计算方法及其在遥感中
的应用[J ].国土资源遥感,1995,02:1-3.[2]郭廷玮,刘鉴明,等.太阳能的利用[M ].北京:科技文献出版社,1987.[3]
Mark J.O ’Neill ,A.J.McDanal.The 25K ilowatt SolarRow :A Building Block For Utility -Scale Concentrator Systems [J ].IEEE Transactions on Energy Conversion ,25(1996),1529-1532.
[4]郑小年,黄巧燕.太阳跟踪方法及应用[J ].能源技术.,2003,24(4):149-151.
[5]
陈维,李戬洪.抛物柱面聚焦的几种跟踪方式的光学性能分析[J ].太阳能学报.,2003,24(4):478-479.
The Automatic Sun -T racking Device for T rough concentrating System
X U Li 2Shuang , LI Ming , WEI Sheng 2X ian , ZHOU X i 2Zheng
(School of Physics and Electronic Information ,Yunnan Normal University ,Kunming 650092,China )
ABSTRACT : Based on t he p rinciple of t he movement of t he sun ,a new met hod of sun -tracking is
p resented in t his paper.The mechanical st ruct ure of t he automatic sun -tracking concent rating sys 2tem and t he p rinciple as well as t he way of t he automatic sun -t racking have been given.The experi 2mental device of t he t hrough co ncent rating system has been fabricated in order to apply to practice.The solar trough concent rating system will has a wide application in solar energy fields such as heat 2ing ,cooling and desalinizatio n and so on.
KEY WOR DS : Trough Concent rating System ;Automatic Sun -Tracking ;Mechanical Struct ure ;Auto -cont rol
?
33? 第1期
徐丽霜,等: 太阳能槽式聚光反射镜自动跟踪装置
太阳能跟踪器工作原理
太阳能跟踪器的工作原理 一工作原理 “太阳光寻迹传感器”安装在太阳能装置上,根据太阳光的位置,驱动电机,带动机械转动机构,始终跟随太阳位置运动。当太阳偏转一定角度时(一般5--10分钟左右),控制器发出指令,转动机构旋转几秒钟,到达正对太阳位置时时停止,等待下一个太阳偏转角度,一直这样间歇性运动;当阴天或晚上没有太阳出现时停止动作;只要出现太阳它就自动寻找并跟踪到位,全自动运行,无需人工干预,东西向、南北向二维控制,也可单方向控制,使用电源直流12伏,技术指标 1. 跟踪起控角度:1°--10°(不同应用类型) 2. 水平(太阳方位角)运行角度:Ⅰ型0°--360°,Ⅱ型-20°-- +200° 3. 垂直(太阳高度角)调整角度:10°--120°(太阳光与地面夹角) 4. 传动方式:丝杠、涡轮蜗杆、齿轮 5. 承载重量:10Kg-- 500Kg 6. 系统重量:2 Kg--500Kg 7. 电机功率:0.4W--15W 8. 电源电压 DC6V--24V 9. 运行环境温度: -40--85℃ 10.运行时间≥10万小时 11.室外全天候条件运行现有的太阳能自动跟踪控制器无外乎两种:一是使用一只光敏传感器与施密特触发器或单稳态触发器,构成光控施密特触发器或光控单稳态触发器来控制电机的停、转;二是使用两只光敏传感器与两只比较器分别构成两个光控比较器控制电机的正反转。由于一年四季、早晚和中午环境光和阳光的强弱变化范围都很大,所以上述两种控制器很难使大阳能接收装置四季全天候跟踪太阳。这里所介绍的控制电路也包括两个电压比较器,但设在其输人端的光敏传感器则分别由两只光敏电阻串联交叉组合而成。每一组两只光敏电阻中的一只为比
聚光条件下太阳能电池性能的理论研究
江西科技师范大学 毕业论文 题目(中文):聚光条件下太阳能电池性能的理论研究(外文):Study of the power characteristic of solar cells in concentration 院(系):xxxxxxxxxxxxxx 专业:xxxxxxxxxxxxxx 学生姓名:xxx 学号:xx xx 指导教师:x x 2016年4月20 日
目录 1.概述........................................................................................................................ - 1 - 2.聚光型太阳能材料及技术.................................................................................... - 1 - 2.1聚光用的太阳能电池原材料...................................................................... - 2 - 2.2产品构成与关键技术.................................................................................. - 2 - 3.聚光条件下太阳能电池发电的理论分析............................................................ - 3 - 3.1非聚光条件下的太阳能电池发电.............................................................. - 3 - 3.2聚光条件下的太阳能电池发电.................................................................. - 5 - 3.3聚光倍数与电池输出功率关系.................................................................. - 6 - 3.3.1 传热分析........................................................................................... - 6 - 3.3.2 聚光倍数与电池输出功率关系....................................................... - 7 - 3.3.3 计算实例......................................................................................... - 10 - 3.4聚光降低光伏发电成本............................................................................ - 11 - 3.4.1 聚光提高电池片转换效率............................................................. - 11 - 3.4.2 聚光减少昂贵的电池片消耗......................................................... - 11 - 4.总结与展望.......................................................................................................... - 12 - 结束语..................................................................................................................... - 14 - 参考文献................................................................................................................. - 15 -
太阳能自动跟踪系统方案
摘要 人类正面临着石油和煤炭等矿物燃料枯竭的严重威胁,太阳能作为一种新型能源具有储量无限、普遍存在、利用清洁、使用经济等优点,但是太阳能又存在着低密度、间歇性、空间分布不断变化的缺点,这就使目前的一系列太阳能设备对太阳能的利用率不高。太阳光线自动跟踪装置解决了太阳能利用率不高的问题。本文对太阳能跟踪系统进行了机械设计和自动跟踪系统控制部分设计。 第一,机械部分设计: 机械结构主要包括底座、主轴、齿轮和齿圈等。当太阳光线发生偏离时,控制部分发出控制信号驱动步进电机1带动小齿轮1转动,小齿轮带动大齿轮和主轴转动,实现水平方向跟踪;同时控制信号驱动步进电机2带动小齿轮2,小齿轮2带动齿圈和太阳能板实现垂直方向转动,通过步进电机1、步进电机2的共同工作实现对太阳的跟踪。 第二,控制部分设计: 主要包括传感器部分、信号转换电路、单片机系统和电机驱动电路等。系统采用光电检测追踪模式实现对太阳的跟踪。传感器采用光敏电阻,将两个完全相同的光敏电阻分别放置于一块电池板东西方向边沿处下方。当两个光敏电阻接收到的光强度不相同时,通过运放比较电路将信号送给单片机,驱动步进电机正反转,实现电池板对太阳的跟踪。 关键词太阳能;跟踪;光敏电阻;单片机;步进电机
Abstract Human being is seriously threatened by exhausting mineral fuel, such as coal and fossil oil. As a kind of new type of energy sources, solar energy has the advantages of unlimited reserves, existing everywhere,using clean and economical .But it also has disadvantages ,such as low density,intermission,change of space distributing and so on.These make that the current series of solar energy equipment for the utilization of solar energy is not high. In order to keep the energy exchange part to plumb up the solar beam,it must track the movement of solar.In this paper, the solar tracking system of the mechanical part and control system part are designed. First,the mechanical part is designed. Mechanical structure mainly includes the main spindle, stepping motors, gears and gear ring, and so on. When the sun's rayshas a deviation, small gear arerotated by stepper motor according to the control signal from MCU. And the large gear and main spindle is rotated by small gear in order to track to achieve the level direction.At the same time, another small gear is rotated by another stepper motor according to the control signal.And the large gear and the solar panels are rotated by the small gear in order to track to achieve the vertical direction. Solar is tracked by the two stepper motors together. Second, control system part is designed. Control system mainly includesthe sensors part, stepper motor, MCU system and the corresponding external circuit, and so on. Photoelectric detection systemisused to track solar. Sensors use photosensitive resistance. The two same photosensitive resistances were placed in east and west direction of the bottom edge .When the two photosensitive resistances receiveddifferent light at the same time, the signal from comparison circuit is sent to MCU in order to rotate stepping motors. Keywords Solar energyTrackingPhotosensitive resistance SCMSteppingmotor
聚光型太阳能电池技术及现状
摘要 近年来,多晶硅原材料的紧缺,已制约了单晶硅或多晶硅的硅级电池的规模生产。由于高昂的上游原料的成本导致光伏发电成本居高不下,与传统的电力价差悬殊是光伏并网发电市场尚不能全面启动的主要因素之一。高倍聚光电池及系统的规模应用,将在缓解太阳能电池对硅原料的依赖和降低成本方面有很大的改进和创新。 关键词:硅级电池高倍聚光电池低成本新型技术
绪言 (4) 一.聚光型太阳能材料及技术 (5) 1.1聚光用的太阳能电池原材料 (5) 1.2产品构成与关键技术 (5) 二.产品与技术发展模式 (5) 三.产品核心优势 (6) 3.1 光电转换效率高 (6) 3.2 单位面积输出功率高 (7) 3.3 市场应用现状 (7) 四.未来太阳能电池市场前景展望 (7) 4.1 聚光电池应用前景 (8) 五.行业重点技术和公司关注 (9) 参考文献13
聚光电池是降低太阳电池利用总成本的一种措施,通过聚光器使较大面积的阳光聚在一个较小的范围内,形成“焦斑”或“焦带”,并将太阳电池置于“焦斑”或“焦带”上,以增加光强克服太阳辐射能流密度低的缺陷,从而获得更多的电能输出。通常聚光器的倍率大于几十,其结构可采用反射式或透镜式。聚光器的跟踪一般用光电自动跟踪,散热方式可以是气冷或水冷,有的与热水器结合,既获得电能,又得到热水。用于聚光太阳电池的单体,与普通太阳电池略有不同,因需耐高倍率的太阳辐射,特别是在较高温度下的光电转换性能要得到保证,故在半导体材料选择、电池结构和栅线设计等方面都比较特殊。最理想的材料是砷化镓,其次是单晶硅材料。在电池结构方面,普通太阳电池多用平面结构,而聚光太阳电池常采用垂直结构,以减少串联电阻的影响。同时,聚光电池的栅线也较密,典型的聚光电池的栅线约占电池面积的1O%,以适应大电流密度需要。
太阳能自动跟踪系统的设计
太阳能自动跟踪系统的设计 1引言 开发新能源和可再生资源是全世界面临的共同课题,在新能源中,太阳能发电已成为全球发展最快的技术。太阳能作为一种清洁无污染的能源,开发前景十分广阔。然而由于太阳存在着间隙性,光照强度随着时间不断变化等问题,这对太阳能的收集和利用装置提出了更高的要求(见图1)。目前很多太阳能电池板阵列基本都是固定的,不能充分利用太阳能资源,发电效率低下。据测试,在太阳能电池板阵列中,相同条件下采用自动跟踪系统发电设备要比固定发电设备的发电量提高35%左右。 所谓太阳能跟踪系统是能让太阳能电池板随时正对太阳,让太阳光的光线随时垂直照射太阳能电池板的动力装置,能显著提高太阳能光伏组件的发电效率。目前市场上所使用的跟踪系统按照驱动装置分为单轴太阳能自动跟踪系统和双轴太阳能自动跟踪系统。所谓单轴是指仅可以水平方向跟踪太阳,在高度上根据地理和季节的变化人为的进行调节固定,这样不仅增加了工作量,而且跟踪精度也不够高。双轴跟踪可以在水平方位和高度两个方向跟踪太阳轨迹,显然双轴跟踪优于单轴跟踪。 图1 太阳能的收集装置现场 从控制手段上系统可分为传感器跟踪和视日运动轨迹跟踪(程序跟踪)。传感器跟踪是利用光电传感器检测太阳光线是否偏离电池板法线,当太阳光线偏离电池板法线时,传感器发出偏差信号,经放大运算后控制执行机构,使跟踪装置从新对准太阳。这种跟踪装置,灵敏度高,但是遇到长时间乌云遮日则会影响运行。视日运动轨迹跟踪,是根据太阳的实际运行轨迹,按照预定的程序调整跟踪装置。这种跟踪方式能够全天候实时跟踪,其精度不是很高,但是符合运行情况,应用较广泛。 从主控单元类型上可以分为PLC控制和单片机控制。单片机控制程序在出厂时由专业人员编写开发,一般设备厂家不易再次进行开发和参数设定。而学习使用PLC比较容易,通过PLC厂家技术人员的培训,设备使用厂家的技术人员可以很方便的学会简单的调试和编写,并且PLC能够提供多种通讯接口,通讯组网也比较方便简单。
槽式聚光太阳能系统太阳电池阵列
第29卷 第12期2008年12月 半 导 体 学 报 J OU RNAL O F S EM ICOND U C TO RS Vol.29 No.12 Dec.,2008 3国家高技术研究发展计划(批准号:2006AA 05Z 410),国家基础研究发展规划计划前期研究专项(批准号:2007CB 216405),云南省自然科学基金重点资 助项目(批准号:2007C 0016Z ,2005E 0031M )及教育部出国留学回国人员基金资助项目 通信作者.Email :l mdocyn @p https://www.360docs.net/doc/53316747.html, 2008206214收到,2008207215定稿Ζ2008中国电子学会 槽式聚光太阳能系统太阳电池阵列3 徐永锋1 李 明1,2, 王六玲1 何建华1 张兴华1 王云峰1 项 明1 (1云南师范大学物理与电子信息学院,昆明 650092) (2云南师范大学太阳能研究所,昆明 650092) 摘要:基于槽式聚光太阳能系统分别对单晶硅电池阵列、多晶硅电池阵列、空间太阳电池阵列和砷化镓电池阵列进行测试 实验.结果表明,聚光后,前3种电池阵列的I 2V 曲线都趋于直线,输出功率急剧减少,系统效率下降较快.而砷化镓电池阵列有较好的I 2V 曲线,其效率由聚光前的23166%增加到26150%,理论聚光比为16192时,输出功率放大1112倍,聚光光伏系统中可采用砷化镓电池阵列以提高效率.砷化镓电池阵列P m 、F F 和η的温度系数分别为-0112W/K 、-0110%/K 和-0121%/K ,为避免温度的影响须采用强制冷却方式保证电池效率,同时对外供热.研究表明,10片单晶硅电池串联阵列最佳工作时的理论聚光比为4123;16片空间太阳电池串联阵列最佳工作时的理论聚光比为8146.研究工作对提高槽式聚光系统效率和大规模利用聚光光伏发电提供了依据. 关键词:聚光太阳能系统;输出功率;填充因子;温度系数EEACC :8230G ;8250;8420中图分类号:TN 304 文献标识码:A 文章编号:025324177(2008)1222421206 1 引言 目前,开发利用太阳能已成为世界各国可持续发展的主要战略决策,但是,太阳能量的分散性却成为利用太阳能的主要障碍[1].采用聚光方法,几倍乃至几百倍地提高太阳能辐射功率密度,以提高单位面积太阳电池的输出功率,降低光伏发电成本,具有较好的应用前景[2].国际上,20世纪70年代末至80年代初,美国M I T 的Hendire 及美国B r ow n 大学的Russell 教授最先涉及光伏与光热的研究[3,4];1995年挪威学者对PV/ T 系统进行了实验研究[5,6] ;而希腊学者于2002年对 PV/T 系统进行了实验研究[7,8] ,较为详细地报道了用水或用空气作为太阳电池板冷却工质时,系统的供电与供热特性;澳大利亚国立大学可再生能源研究中心采用80个槽式抛物面跟踪太阳反射镜系统,聚22倍光作用于太阳电池板,此时电池的效率达到22%以上,在同等功率输出条件下,采用槽式抛物面聚光太阳能光伏发电的成本仅为非聚光平板太阳能光伏发电成本的60%,该大学在2004年对槽式聚光系统在热电联供方面做了较系统的研究[9].目前国内只是对单片常规电池进行实验和模拟计算研究,并没有相关的实验研究.因此本文基于槽式聚光太阳能系统,汇集高密度太阳能对单晶硅电池阵列、多晶硅电池阵列、空间太阳电池阵列、砷化镓电池阵列进行实验研究,根据太阳电池阵列的特性曲线分析电池性能,找出影响电池阵列输出特性的因素,并分析了不同光照情况下的I 2V 曲线. 为保证电池效率及防止电池温度过高,采用冷却方法,控制冷却流体的流速来调节电池的温度,同时得到热能.研究工作对槽式聚光太阳能系统进一步优化提供依据. 2 实验 槽式聚光太阳能系统集热装置如图1所示,采用结构简单、跟踪方便、应用最广泛的槽式抛物面反射聚光器,集热器内腔体为纯铝型材,内腔体与外腔体之间用保温层隔开,太阳电池由导热绝缘胶贴在集热器下表面.太阳光由镜面反射汇集在电池上,成倍增加单位面积电池的输出功率,通过背面圆形管道中的水强制冷却电池温度,热水流出导管后被存储起来对外供热.在聚光条件下,太阳电池阵列输出电功率,同时得到热能,系统可实现热电联供 . 图1 槽式聚光太阳能系统集热装置图 Fig.1 Diagra m of collect or of t he t rough conce nt rating solar e negy syste m
聚光太阳能发电
聚光太阳能发电?聚光太阳能发电(CONcentrating Solar Power)简称CSP是采用反射镜把太阳光反射并聚集到接收器,该接收器能够聚集太阳能并将其转换为热能,利用这种热能生产的热蒸汽,推动涡轮发动机,从而驱动发电机发电,满足电力需求。太阳能到电能的高效率转换特性,使CSP技术成为具有吸引力的可再生能源项目。 目录 ?聚光太阳能发电的几种主要形式 ?聚光太阳能发电的基本原理 ?聚光太阳能发电系统的组成 ?聚光太阳能发电的发展现状 ?聚光太阳能发电的发展优势 聚光太阳能发电的几种主要形式 ?一、线性聚光系统 线性聚光太阳能发电采用线聚焦技术,线性聚光器包括抛物面槽式系统和线性菲涅耳反射系统2种,利用很大的反射镜来捕获太阳的能量,并把太阳光反射和对焦集中到焦线上,在这条焦线上安装有线性管状集热器,集热器吸收聚焦后的太阳辐射能,把吸热管内的流体加热,然后产生过热蒸汽,驱动涡轮发电机产生电力。线性集中聚光器系统通常由按南北向平行排列的大量聚光器组成,这样保证最大限度地聚集太阳能。 1.抛物面槽式系统 目前,在美国太阳能热发电领域中占主导地位的是抛物面槽式线性聚光系统,槽式太阳能发电系统由太阳能聚光器,以及吸热配件或接收器和跟踪机构组成。其中太阳能聚光器由许多弯曲的反射镜组合装配而成,安装在支架上。吸热管或接收
器管沿着每个抛物形反射镜的焦线固定安装,用以吸收太阳辐射能,传热工质(不管是传热流体还是水/蒸汽)都要从太阳能集热管中流过,从而产生过热蒸汽,直接输送到涡轮机用以发电。 2.线性菲涅尔反射器系统 第二种线性聚光技术是线性菲涅尔反射器系统,该系统由反射镜。聚光器和跟踪机构组成。把平坦的或略有弯曲的反射镜安装配置在跟踪器上,在反射镜上方的空间安装吸热管,反射镜把阳光反射到吸热管。有时在聚光器的顶部加装小型抛物面反射镜,以加强阳光的聚焦。 二、碟式引擎系统 与其他聚光太阳能发电技术相比,碟式引擎系统产生的电力功率相对较少,通常在3~25万kW的范围内,很适合分布式应用,如果将多个这样分布安装的单元碟式。引擎系统整合成一簇,可以实现集中向电网供电,不但能缓解电力能源需求,还可以提高整个电网的运行安全性。整个发电系统安装在一个双轴跟踪支撑机构上,实现定日跟踪,连续发电,发电效率高达30%,在相同的运行温度下,发电效率明显高于槽式和塔式,是所有太阳能热发电系统中效率最高的。缺点是碟式太阳能热发电系统的单元发电容量较小。 三、塔式系统 塔式太阳能热发电系统主要由日光反射镜子系统。接收器组成,见图。其中日光反射镜子系统由大量大型。平坦的太阳跟踪反射镜构成,对太阳进行实时跟踪,把太阳光聚焦到塔顶的接收器。在接收器中对传热流体进行加热,产生高温过热蒸汽,过热蒸汽推动常规涡轮发电机组发电。一些电力塔利用水。蒸汽作为传热流体。由于其卓越的传热和能量存储能力,在其他先进的设计中,对其进行了熔融硝酸盐试验。具有商业规模的工厂可以生产200MW的电力造价十分昂贵,建设电站的投资很高
太阳能自动跟踪装置设计报告
吉林铁道职业技术学院 电子制作职业技能大赛(论文) 题目太阳能自动跟踪装置设计
参赛人姓名王志会张卫国朱峰所在系电气工程系 指导教师陈冬鹤 完成时间2013年5月26日
吉林铁道电子制作职业技能大赛设计报告 题目:太阳能自动跟踪装置设计 主要内容、基本要求等: ◆主要内容:加强大学生动手操作能力,促进集体荣誉感。 ◆基本要求:1,利用单片机控制实现太阳能电池板随着太阳(光源)的位置变 化而调整自身相应的姿态,以达到太阳光能的最佳利用。 2,实现一定的姿态控制精度。 3,以低成本、低功耗完成设计并实现目标电路的组装。 ◆主要参考资料:电路基础、电工技术、电子手工焊接、单片机原理及应用、传感器原理与应用。 完成日期:2013年5月26日 指导教师:陈冬鹤 实验组组长:王志会 2013年 6 月 5 日
太阳能自动跟踪装置 研制目的 人类正面临着石油和煤炭等矿物燃料枯竭的严重威胁,太阳能作为一种新型能源具有储量无限、普遍存在、利用清洁、使用经济等优点,太阳能光伏发电是改善生态环境、提高人类生存质量的绿色能源之一,但由于传统太阳能板方向固定,受光时间有限。因此研制可随光移动的太阳能跟随系统。
一自动跟踪系统整体设计 1.1 系统总体结构 本系统包括光电转换器、步进电机、89C5系列单片机以及相应的外围电路等。太阳能电池板可以360度自由旋转。控制机构将分别对水平方向进行调整。单片机加电复位后,首先由TRCT5000构成的定位系统对整个系统进行预置定位,然后单片机将对两光敏电阻采样进来的两个电平进行比较,电平有高电平和低电平两种,若两电平相等则电池板停止转动,若不等单片机将对两电平进行比较判定,驱动步进电机让太阳能板与之相对应转动,实现电池板对太阳的跟踪。图1-1所示: 1.2 光电转换器
太阳能自动跟踪系统的设计
太阳能自动跟踪系统的设计 解决方案: 跟踪系统驱动器接口电路 步进电机驱动电路 限位信号采集电路 太阳能是已知的最原始的能源,它干净、可再生、丰富,而且分布范围广,具有非常广阔的利用前景。但太阳能利用效率低,这一问题一直影响和阻碍着太阳能技术的普及,如何提高太阳能利用装置的效率,始终是人们关心的话题,太阳能自动跟踪系统的设计为解决这一问题提供了新途径,从而大大提高了太阳能的利用效率。 跟踪太阳的方法可概括为两种方式:光电跟踪和根据视日运动轨迹跟踪。光电跟踪是由光电传感器件根据入射光线的强弱变化产生反馈信号到计算机,计算机运行程序调整采光板的角度实现对太阳的跟踪。光电跟踪的优点是灵敏度高,结构设计较为方便;缺点是受天气的影响很大,如果在稍长时间段里出现乌云遮住太阳的情况,会导致跟踪装置无法跟踪太阳,甚至引起执行机构的误动作。 而视日运动轨迹跟踪的优点是能够全天候实时跟踪,所以本设计采用视日运动轨迹跟踪方法和双轴跟踪的办法,利用步进电机双轴驱动,通过对跟踪机构进行水平、俯仰两个自由度的控制,实现对太阳的全天候跟踪。该系统适用于各种需要跟踪太阳的装置。该文主要从硬件和软件方面分析太阳自动跟踪系统的设计与实现。 系统总体设计 本文介绍的是一种基于单片机控制的双轴太阳自动跟踪系统,系统主要由平面镜反光装置、调整执行机构、控制电路、方位限位电路等部分组成。跟踪系统电路控制结构框图如图1所示,系统机械结构示意图如图2所示。
任意时刻太阳的位置可以用太阳视位置精确表示。太阳视位置用太阳高度角和太阳方位角两个角度作为坐标表示。太阳高度角指从太阳中心直射到当地的光线与当地水平面的夹角。太阳方位角即太阳所在的方位,指太阳光线在地平面上的投影与当地子午线的夹角,可近似地看作是竖立在地面上的直线在阳光下的阴影与正南方的夹角。系统采用水平方位步进电机和俯仰方向步进电机来追踪太阳的方位角和高度角,从而可以实时精确追踪太阳的位置。上位机负责任意时刻太阳高度角和方位角的计算,并运用软件计算出当前状况下俯仰与水平方向的步进电动机运行的步数,将数据送给跟踪系统驱动器,单片机接收上位机送来的数据,驱动步进电机的运行。系统具有实现复位、水平方位的调整,俯仰方向的调整,太阳的跟踪及手动校准等功能。 硬件电路设计 1跟踪系统驱动器接口电路
聚光型太阳能电池技术及现状
太阳能光电工程学院 《太阳能电池及其应用》 课程设计报告书 题目:聚光型太阳能电池技术及现状 姓名: 设计成绩: 指导教师: 摘要 本文概述了目前全球能源现状,以及聚光型太阳能电池的市场背景,表明了太阳能发电的重要性和前景,详细介绍了聚光型太阳能电池的技术、现状以及与普通太阳能电池的区别,并对普通太阳能电池与聚光型太阳能电池发电所需发电成本进行比较。详细介绍了塔式、槽式、碟式太阳能发电的原理及优缺点。
指出电池冷却技术的必要性和冷却技术。同时指出聚光型太阳能电池发展面临的困难和解决措施,以及今后的发展方向。通过改造电池制造工艺、提高转换效率、聚焦技术的应用等手段,可以有效降低光伏发电成本,也是国内外本领域研究的热点。其中采用聚焦技术是一个有效地方法。对常规太阳能电池进行聚光,使太阳电池工作在几倍乃至几百倍的光强条件下,一定程度上克服了太阳能量的分散性,可以提高单位面积太阳电池的输出功率,大大降低光伏发电成本,具有很好应用前景。 关键词:聚光型太阳能电池技术措施 目录 绪言 (2) 1.聚光型太阳能原理及技术 (3)
1.1聚光型太阳能电池的原理 (3) 1.2聚光型太阳能电池的关键技术 (4) 1.3塔式太阳能发电技术 (5) 1.4槽式太阳能发电 (6) 1.5碟式太阳能发电 (7) 1.6电池的冷却技术 (7) 2.产品的的核心优势 (10) 2.1光电转换效率高 (10) 2.2单位面积输出功率高 (10) 3.现状与展望 (10) 3.1我国聚光型太阳能电池的现状 (10) 3.2展望 (11) 参考文献 (12) 绪言 随着经济的发展,社会的进步,人们对能源提出了越来越高的要求,由于全球气候变迁、空气污染问题以及资源的日趋短缺之故,传统的燃料能源正在一天天减少,与此同时全球还有约20亿人得不到正常的能源供应。寻找新能源成
高倍聚光光伏电池作为第三代太阳能发电技术
高倍聚光光伏(HCPV)电池作为第三代太阳能发电技术正逐渐成 为太阳能领域的新焦点 经过30多年的发展,高倍聚光光伏(HCPV)电池作为第三代太阳能发电技术正逐渐成为太阳能领域的新焦点,引起了行业内企业的追逐。在日光照射较好的几个欧美国家,已通过了优惠的上网电价法,随着具有40%转换效率的Ⅲ-V 族半导体多结太阳能电池的普及和成本下降,高倍聚光光伏电池市场进入快速增长期。与前两代电池相比,HCPV采用多结的砷化镓电池,具有宽光谱吸收、高转换效率、良好的温度特性、低耗能的制造过程等优点,使它能在高倍聚焦的高温环境下仍保持较高的光电转换效率。高倍聚光光伏系统技术门槛较高且行业跨度大,涵盖半导体材料及工艺制造、半导体封装、光学设计制造、自动化控制、机械设计制造、金属加工等领域。HCPV行业的产品包括了多结电池片外延材料、光电转换芯片、光接收器组件、聚光器、光伏模组、双轴跟踪器等。 电池芯片采用多结技术大幅提高光电转换效率 与硅基材料相比,基于III-V族半导体多结太阳能电池具有最高的光电转换效率,大致要比硅太阳能电池高50%左右。III-V族半导体具有比硅高得多的耐高温特性,在高照度下仍具有高的光电转换效率,因此可以采用高倍聚光技术,这意味着产生同样多的电能只需要很少的太阳电池芯片。多结技术一个独特的方面就是材料——可选择不同的材料进行组合使它们的吸收光谱和太阳光光谱接 近一致,相对晶硅,这是巨大的优势。后者的转换效率已近极限(25%),而多结器件理论上的转换效率可达68%。目前最多使用的是由锗、砷化镓、镓铟磷3种不同的半导体材料形成3个p-n结,在这种多结太阳能电池中,不但这3种材料的晶格常数基本匹配,而且每一种半导体材料具有不同的禁带宽度,分别吸收不同波段的太阳光光谱,从而可以对太阳光进行全谱线吸收。 HCPV芯片的生产过程如下,首先利用MOCVD技术在4英寸锗衬底上外延砷化镓和铟镓磷形成3结电池片的材料,然后在外延片上利用光刻、PECVD、蒸镀等技术,制备减反膜以及主要成份为银的金属电极,再经划片清洗等工艺,生产出HCPV芯片。HCPV芯片的主要生产商有美国的Spectrolab、Emcore,德国的Azurspace,加拿大Cyrium,中国台湾Arima、Epistar等。衬底剥离的芯片和量子点技术是目前HCPV芯片领域的新热点。 接收器要安全可靠稳定地应用于系统 聚光太阳能电池芯片被封装到光接收器中,接收器封装对太阳能电池进行保护,对会聚光均匀化,同时起到散热的作用。接收器组件还包括旁路二极管和引线端子。芯片的主要焊接工艺有回流焊和共晶焊,二者最主要的区别在于前者使用助焊剂焊接,在焊接后需要清洗去除残留助焊剂,而共晶焊使用无助焊剂的焊片焊接。为了将电从芯片导出,需要进行金带键合将芯片和外围电路连接起来。接收器组件的检验指标主要包括空洞率和电性能测试,空洞率是检验焊接良好与否的标准。电性能方面,5.5mm×5.5mm接收器组件在500倍太阳光下的光电 转换率高达38.5%以上。在实际使用中,还需要将接收器组件与二次光学器件、散热器封装在一起,组成完整的接收器。二次光学器件可以降低对跟踪器高精准度的要求,并使通过涅尔透镜聚焦后的光斑更加均匀地照射到电池芯片上。 二次光学元件通常是光学玻璃棱镜或中空的倒金字塔金属反射器。为了最大限度地利用太阳能资源,节省芯片材料以降低成本,可以提高电池的聚光倍数,
太阳能自动跟踪系统
1.绪论 1.1课题背景 由于现今高科技环境下,能源是促进经济发达和社会进步的原动力。从工业革命以来,人类所使用的主要能源为石化能源,然而其蕴藏量有限,大量使用造成全球环境生态和气候产生莫大的变化,同时大气中的温室气体浓度大幅提高,造成气温逐渐升高、海平面上升等温室效应的现象,威胁了我们生存的环境。因此在环保意识抬头的今日,积极开发低污染及低危险性能源乃为迫切的需要。 虽然在可预见的将来,煤炭,石油,天然气等矿物燃料仍将在世界能源结构中占有相当的比重,但是人们对核能及太阳能,风能,地热能,水力能,生物能等可持续能源资源的利用日益重视,在整个能源消耗中所占的比例正在显著的提高。据统计,20世纪90年代,全球煤炭和石油的发电量每年增长1%,而太阳能发电每年增长达20%,风力发电的年增长率更是高达26%。预计在未来,可持续能源将与矿物燃料相抗衡,从而结束矿物燃料一统天下的局面。 相对日益枯竭的化石能源来说,太阳能似乎是未来社会能源的希望所在。1.1.1我国太阳能资源 我国幅员广大,有着十分丰富的太阳能资源。我国的国土跨度从南到北、自西至东,距离都在5000km以上,总面积达960×10 km2,占世界总面积的7%,居世界第三位。据估算,我国陆地表面每年接收的太阳辐射能约为50×10kJ,全国各地太阳年辐射总量达335~837KJ/cm2A,中值为586KJ/cm2A。从全国太阳年辐射总量的分布来看,西藏、青海、新疆、内蒙古南部、山西、陕西北部、河北、山东、辽宁、吉林西部、云南中部和西南部、广东东南部、福建东南部、海南岛东部和西部以及台湾省的西南部等广大地区的太阳辐射总量很大。尤其是青藏高原地区最大,那里平均海拔高度在4000m以上,大气层薄而清洁,透明度好,纬度低,日照时间长。例如,被人们称为“日光城”的拉萨市,1961年至1970年的平均值,年平均日照时间为3005.7h,相对日照为68%,年平均晴天为108.5天,阴天为98.8天,年平均云量为4.8,太阳总辐射为816KJ/cm2A,比全国其它省区和同纬度的地区都高。全国以四川和贵州两省的太阳年辐射总量最小,其中尤以四川盆地为最,那里雨多、雾多,晴天较少。例如素有“雾都”之称的成
太阳能电池聚光器的模拟优化
太阳能电池聚光器的模拟优化 孟涛,张志强,芮智刚 (江苏大学能源与动力工程学院,江苏镇江212013) 摘要:设计了三种槽式太阳能电池聚光反射器模型:梯形、圆弧形和抛物线形,在光学软件Fred中建立模型,利用软件提供的光线 跟踪方法,针对其有,无跟踪太阳两种情况进行优化,得出了在这两种情况下,不同几何聚集比(c=1.5,2,2.5,3,3.5)时的 最佳形状参数(倾角p或高底比‰),为实际生产加工过程提供了指导,最后对比了三种聚光反射结构的优缺点。 关键词:聚光反射器;模拟;优化设计;最佳形状;跟踪 中图分类号:TK513.1文献标志码:A文章编号:l002?1639(2009)02-0020-03 optimizingSimuIationfortheFOcusRenectonwithSolarAbsorbedBonOm MENGTao,ZHANGzhi—qiang,ImlZhi-gang (Sch00lofEneq黟卸dPow%Ji狮gsuUnive稻i吼zhenji卸g212013,China) Abstract:Th他e廿10ughf|0cus佗nect0体usedbysolarcenwemdesi鲫ed.Theshapesa陀trapezi哪,aIc锄dparablola.The佗modelswemc他atedintlleopticalsoftwa佗Fred.Ailningatthesituationtllat仃acingsoIarornot,柚dusingtlle豫y仃acingmethodoffe他dbyt11esoRwam, thebestshapepammeter汹gIe口or凰)w邪obtainedcorrespondingtlledi毹佗ntge伽e蚵collcctmtio(C=1.5,2,2.5,3,3.5).111e坞sultc蜘beusedintllem孙ufkmre即ccss.Atl舔t,tlleadv锄tages柚ddisadv锄tagesofttl】呛emodelswe佗disc璐∞d. Keywords:focus陀nectors;siInulati∞;叩timizeddesigIl;bestshape;trace 槽式太阳能电池聚光器(见图1)是低倍聚光装置,对于我国光伏技术不高的现状有实际意义。太阳能电池聚光装置可以提供高的光强,从而提高电池的开路电压,另一方面,廉价的聚光反射器可以代替部分昂贵的太阳能电池,从而减少了总成本‘卜2】。 图l槽式太阳能电池聚光器 此种聚光反射器也可以用作平板集热器的聚光反射装置。普通的无聚集式的平板集热器很难达到比较高的温度,因而限制了其进一步的发展。为了拓宽其应用,可以在其吸收面上方加聚光反射板,增加采光面积,提高吸收面的人射太阳辐射量。 在聚光器的模拟优化方面,刘灵芝等[3】对太阳能真空管所用的聚光器进行了计算机程序设计及模拟优化;杜胜华等【4]采用自编的程序研究了太阳光不平行度对碟式太 收稿日期:2008一11_03 作者简介:盂涛(1986一),男,河南南阳人,硕士研究生,研究方向:太阳能热利用及相关. 20阳能反射聚集器聚集性能的影响。 l模型建立 本文设计优化的三种槽形的聚光反射器如图2所示(Fred中建立),横截面分别为梯形、圆弧形和抛物线形。模型按长度方向南北放置,并与地平面成当日正午太阳高度角的余角,使模型长度方向始终垂直于太阳光,因此可以简化为二维的横截面形状优化。本文中的所有优化都是在横截面内进行的二维优化,太阳光为横截面内的平行光源,反射板的太阳光反射率取为1,吸收面的吸收率取为l。剖面图和形状参数如图3所示。 图2三种聚光反射器模型 太阳光太阳光太阳光站国 霄回 图3剖面及形状参数 万方数据
太阳能自动跟踪机械装置
太阳能自动跟踪机械装置 11 310 9A—A4 15 8 2147 16AA 513 171612 1118 太阳能自动跟踪装置原理图 1-支座;2-支柱;3-电池板支架;4-销轴;5-减速箱体;6、15-主轴;7-丝杆;8-横支架;9、18-电机;10-减速器;11-铰链;12、13-齿轮;14-连接轴;16-蜗轮;17-蜗杆1(东西方向跟踪 在减速箱体5内安装由电机18、齿轮12、13、蜗轮16、蜗杆17构成的传动机构。齿轮13固定在连接轴14中部,连接轴通过轴承安装在减速箱体上,蜗轮16固定在主轴6的上端,主轴通过轴承安装在减速箱体上,主轴的下端固定在支座1上,支柱2的下端固定在减速箱体上,支柱2的上端通过销轴4与电池板支架连接。电机18通过齿轮12、13带动蜗杆17转动,并带动减速箱体、电池板支架转动,完成东西方向的跟踪。 2(南北方向跟踪
支柱2上设置一个横支架8,横支架8端部铰接一个减速器10,减速器中设有蜗杆(图中未画出)与电机9相连,蜗杆与设在减速器中的蜗轮啮合,蜗轮中心设有螺孔与丝杆7连接配合,丝杆7的一端通过铰链11与电池板支架连接。电机9通过蜗轮蜗杆、丝杆螺孔机构,带动电池板支架转动,完成南北方向的跟踪。 俯仰跟踪控制。动力源电机1通过联轴器7带动蜗杆8与蜗轮9啮合运动,蜗轮9与齿轮10同轴,经过齿轮10与11的啮合运动,带动与齿轮11同轴的支架12转动,从而实现与支架12固接的硅光电池板13达到仰俯运动跟踪的目的。周转跟踪控制。动力源电机6通过联轴器5带动蜗杆4与蜗轮3啮合运转,从而带动与蜗轮3同轴固联的上箱2实现周转运动,因仰俯控制的传动机构都装在上箱2内,从而达到硅光电池板周转运动跟踪的目的。 两轴分别由两个电机控制,图a表示电机1输出轴连接固定在转台上的减速器1输入轴,减速器1输出轴连接小齿轮,大齿轮固定,当电机转动时驱动小齿轮绕
基于52单片机 太阳能自动跟踪系统设计.
摘要 太阳能是已知的最原始的能源,它干净、可再生、丰富,而且分布范围广,具有非常广阔的利用前景。但太阳能利用效率低,这一问题一直影响和阻碍着太阳能技术的普及。太阳能自动跟踪系统的设计为解决这一问题提供了新途径,从而大大提高了太阳能的利用效率。本设计采用光电跟踪的方法,利用步进电机双轴驱动,由光电传感器根据入射光线的强弱变化产生反馈信号到微机处理器。微机处理器运行程序,通过对跟踪机构进行水平、俯仰两个自由度的控制,调整太阳能电池板的角度实现对太阳的跟踪。采用单片机来实现的太阳能追踪系统能有效提高太阳板的光电转化效率,并具有较广泛的应用前景。 关键词:太阳能;跟踪;光敏二极管;单片机;步进电机
Abstract Solar energy is known as the most primitive energy, and it is clean, renewable, rich, and wide distribution and has wide prospects of use. But the solar energy utilization efficiency is low; the problem has been influencing and hindering the popularity of solar energy technology. Solar energy to be automatic tracking system designed to solve the problem provide the new way,which greatly improve the efficiency in the use of solar energy. This design uses the photoelectric tracking method, and use the stepping motor driver, by photoelectric sensor incident, then the strength of the light’s changes produce feedback signals to the computer processor, and computer processor will run the program, through the horizontal tracking mechanism and pitch two degrees of freedom control to adjust the angle of solar panels to achieve the tracking of the sun. Solar tracking system by single chip microcomputer to achieve can improve the efficiency of conversion of photoelectric solar panels, and has a broad prospect of application. Key words: Solar energy;Tracking;Photosensitive diode ;SCM;Stepping motor