摇摆式运输机机构分析
摇摆式运输机机构分析
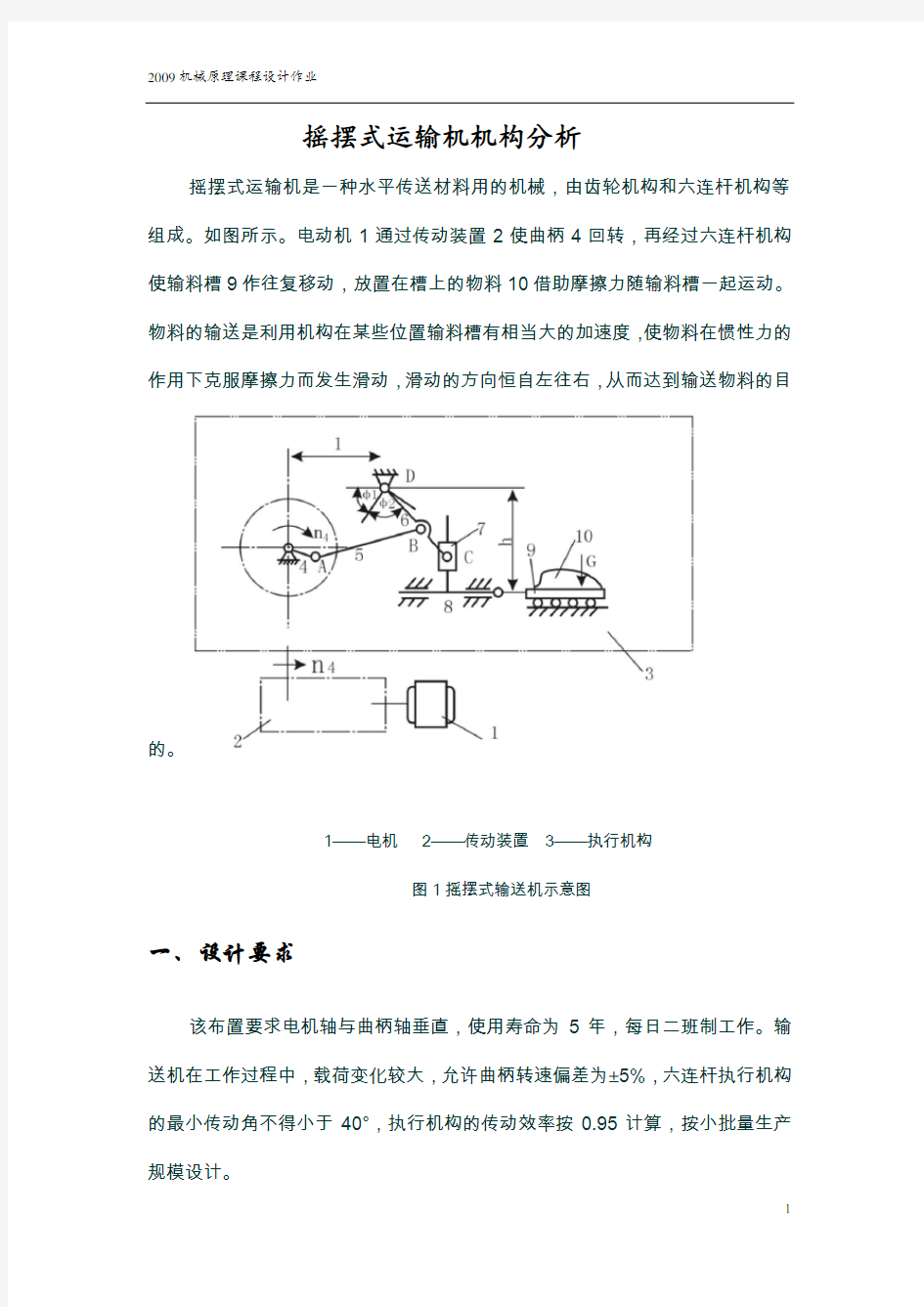
摇摆式运输机是一种水平传送材料用的机械,由齿轮机构和六连杆机构等组成。如图所示。电动机1通过传动装置2使曲柄4回转,再经过六连杆机构使输料槽9作往复移动,放置在槽上的物料10借助摩擦力随输料槽一起运动。物料的输送是利用机构在某些位置输料槽有相当大的加速度,使物料在惯性力的作用下克服摩擦力而发生滑动,滑动的方向恒自左往右,从而达到输送物料的目
的。
1——电机2——传动装置3——执行机构
图1摇摆式输送机示意图
一、设计要求
该布置要求电机轴与曲柄轴垂直,使用寿命为5年,每日二班制工作。输送机在工作过程中,载荷变化较大,允许曲柄转速偏差为±5%,六连杆执行机构的最小传动角不得小于40°,执行机构的传动效率按0.95计算,按小批量生产规模设计。
1.首先进行机构的结构分析并对机构进行杆组分析。
2.进行运动分析,绘制料槽的位移s、速度v及加速度a的线图。
3.进行动态静力分析,绘制出固定铰链点的反力矢端图及平衡力矩T5线图。
4.计算装在o1轴上的飞轮惯量J1。
5.选好电机后并对传动比进行分配和对齿树确定。
6.
二、机构的运动分析
1、杆长计算。
选择书中第7组数据进行计算及分析。
利用autocad2009软件精确制图,并量出两处需要的杆长。作图如上。得出:
l OB1=201.1mm ,l OB2=305.96mm.得出l OA=52.43mm,l AB=253.53mm,l=210mm,h=335mm,l CD=210mm,G=2875kg,l DB=126mm,n4=120r/min,
f= 0.35,
2、杆组的拆分方法
由机构的结构分析可知,本结构可分解为主动件单杆,还有RRR杆组及RPP
杆组。如图所示:
2.形参与实参对照表
1)调用bark函数求2点的运动参数
2)调用rrrk函数求2、3构件的位置角、角速度、角加速度和2点的位置,速度和加速度。
3)调用bark 函数求5点的运动参数 4)调用rppk 函数求7点的位置、速度和加速度 5)调用bark 函数求①杆的质心8点的运动参数 6)调用bark
函数求②杆的质心9点的运动参数。 7)调用bark 函数求③杆的质心10点的运动参数。
三,运动分析
1、根据以上分析进行编程,求得料槽的速度和加速度值。运动分析。
#include "graphics.h"
#include "subk.c" /*运动分析子程序*/
#include "draw.c" /*绘图子程序*/
main()
{
static double p[20][2],vp[20][2],ap[20][2],del;
static double t[10],w[10],e[10];
static double pdraw[370],vpdraw[370],apdraw[370],
wdraw[370],edraw[370];
static int ic; /*定义静态变量*/
double r12,r43,r24,r35,r45,r18,r29,r310,gam4;
double pi,dr;
double r2,vr2,ar2,r3,vr3,ar3;
int i; /*定义局部变量*/
FILE *fp; /*定义文件指针变量*/
char *m[]={"p","vp","ap","w","e"};
/*定义字符串,改变字符串会改变绘图结果的标注*/
r12=0.05243;r24=0.25353;r43=0.126;
r35=0.210;r45=0.084;del=10.0;
r18=0.026215;r29=0.126765;r310=0.105;
gam4=90.0;
e[1]=0.0,t[1]=0.0;
t[6]=0.0;w[6]=0.0;e[6]=0.0;
p[1][1]=0.0;p[1][2]=0.0;
p[3][1]=0.21;p[3][2]=0.24635;
p[6][2]=-0.121;p[6][1]=0.0;
p[7][2]=-0.121; /*变量赋值*/
pi=4.0*atan(1.0); /*求 值*/
gam4=gam4*dr;
dr=pi/180.0; /*求弧度*/
w[1]=-57*pi/15;
printf("\n The Kinematic Parameters of Point 7 and Line 3\n"); printf("No THETA1 S7 V7 A7 W3 E3\n"); printf(" deg m m/s m/s/s r/s r/s/s\n");
/*在屏幕上写表头*/
if((fp=fopen("file1","w"))==NULL)
{
printf("Can't open this file./n");
exit(0);
} /*建立并打开文件file1*/ fprintf(fp,"\n The Kinematic Parameters of Point 7 and Line 3\n");
fprintf(fp,"No THETA1 S7 V7 A7 W3 E3\n"); fprintf(fp," deg m m/s m/s/s r/s r/s/s\n");
/*在文件file1中写表头*/
ic=(int)(360.0/del);
for(i=0;i<=ic;i++)
{ /*建立循环,调用运动分析子程序*/ t[1]=(-i)*del*dr;
bark(1,2,0,1,r12,0.0,0.0,t,w,e,p,vp,ap);
rrrk(-1,2,3,4,2,3,r43,r24,t,w,e,p,vp,ap);
bark(3,0,5,3,0.0,r35,0.0,t,w,e,p,vp,ap);
rppk(5,6,5,7,4,5,6,0.0,0.0,pi/2,&r2,&vr2,
&ar2,&r3,&vr3,&ar3,t,w,e,p, vp,ap);
bark(1,0,8,1,0.0,r18,0.0,t,w,e,p,vp,ap);
bark(2,0,9,2,0.0,r29,0.0,t,w,e,p,vp,ap);
bark(3,0,10,1,0.0,r310,0.0,t,w,e,p,vp,ap);
printf("\n%2d %12.3f %12.3f %12.3f %12.3f %12.2f % 12.2f",i+1,t[1]/dr,p[7][2],vp[7][1],ap[7][1],w[3],e[3]);
/*把运算结果写在屏幕上*/ fprintf(fp,"\n%2d %12.3f %12.3f %12.3f %12.3f %12.2f %12.2f", i+1,t[1]/dr,p[7][1],vp[7][1],ap[7][1],w[3],e[3]);
/*把运算结果写入文件file1中*/ pdraw[i]=p[7][1];
vpdraw[i]=vp[7][1];
apdraw[i]=ap[7][1];
wdraw[i]=w[3];
edraw[i]=e[3];
/*将运算结果传给pdraw[i]、vpdraw[i]、apdraw[i]、wdraw[i]、edraw[i]以备绘图使用*/
if((i%16)==0)
{getch();} /*屏幕满16行停顿*/
}
fclose(fp); /*关闭文件file1*/ getch();
draw1(del,pdraw,vpdraw,apdraw,ic,m); /*调用绘图子程序*/
draw2(del,wdraw,edraw,ic); /*主程序结束*/
}
三.2运行结果:
The Kinematic Parameters of Point 7 and Line 3
No THETA1 S7 V7 A7 W3 E3
deg m m/s m/s/s r/s r/s/s
1 0.000 0.184 0.021 -8.699 0.10 -41.75
2 -10.000 0.18
3 -0.107 -8.737 -0.51 -41.98
3 -20.000 0.181 -0.232 -8.379 -1.12 -40.47
5 -40.000 0.170 -0.45
6 -6.800 -2.21 -33.91
6 -50.000 0.163 -0.548 -5.710 -2.68 -29.54
7 -60.000 0.155 -0.623 -4.477 -3.07 -24.69
8 -70.000 0.145 -0.678 -3.108 -3.40 -19.32
9 -80.000 0.135 -0.713 -1.569 -3.64 -13.07
10 -90.000 0.124 -0.723 0.260 -3.77 -5.00
11 -100.000 0.114 -0.702 2.698 -3.76 7.16
12 -110.000 0.104 -0.638 6.425 -3.52 28.20
13 -120.000 0.095 -0.505 11.952 -2.87 62.54
14 -130.000 0.090 -0.296 15.617 -1.72 88.70
15 -140.000 0.087 -0.087 11.944 -0.51 70.03
16 -150.000 0.087 0.046 6.674 0.27 39.22
17 -160.000 0.088 0.120 3.740 0.70 21.54
18 -170.000 0.090 0.164 2.426 0.95 13.45
19 -180.000 0.093 0.194 1.876 1.12 9.93
20 -190.000 0.096 0.220 1.684 1.25 8.54
21 -200.000 0.099 0.245 1.672 1.37 8.21
22 -210.000 0.103 0.270 1.761 1.49 8.43
23 -220.000 0.107 0.296 1.905 1.62 8.94
24 -230.000 0.111 0.325 2.070 1.75 9.53
25 -240.000 0.116 0.357 2.221 1.90 10.02
27 -260.000 0.128 0.424 2.269 2.19 9.70
28 -270.000 0.134 0.455 2.021 2.32 8.23
29 -280.000 0.141 0.481 1.477 2.43 5.40
30 -290.000 0.148 0.497 0.565 2.47 0.94
31 -300.000 0.156 0.496 -0.730 2.45 -5.20
32 -310.000 0.163 0.474 -2.340 2.32 -12.67
33 -320.000 0.169 0.427 -4.102 2.07 -20.76
34 -330.000 0.175 0.354 -5.798 1.71 -28.49
35 -340.000 0.180 0.259 -7.212 1.24 -34.94
36 -350.000 0.183 0.145 -8.198 0.70 -39.44
37 -360.000 0.184 0.021 -8.699 0.10 -41.75
四.静力分析
1、调用subk函数计算各个质心的运动参数,计算各构件的惯性力和惯性力矩,从外力已知的杆组开始,依次调用subf函数计算各个力的参数,对各个函数要求的形式参数进行赋值。
1)于8、9、10、2、5、7各点,以及①、②、③、④、⑤各杆件的运动参数经在对杆件进行运动分析时给出
2)②调用rppf函数,计算5点的运动副反力
3)调用rrrf函数,计算2,3,4中的反力。
4)调用barf函数,计算转动副1中的反力及应加于构件①上的平衡力矩Tb 2、程序
#include "graphics.h"
#include "subk.c"
#include "subf.c"
#include "draw.c"
static double sm[10],sj[10];
main()
{
static double p[20][2],vp[20][2],ap[20][2],del;
static double t[10],w[10],e[10],tbdraw[370],tb1draw[370];
static double sita1[370],fr1draw[370],sita2[370],fr2draw[370],sita3[370],fr3draw[370];
static double fr[20][2],fe[20][2];
static int ic;
double r12,r34,r24,r18,r29,r310,r35;
double r2,vr2,ar2,gam4,r3,ar3,vr3,fk,pk;
int i;
double pi,dr,fr1,bt1,fr2,bt2,fr4,bt4,we1,we2,we3,we4,we5,tb,tb1,we6;
FILE *fp;
sm[1]=51; sm[2]=35.6; sm[3]=90; sm[4]=900; sm[5]=60; sj[1]=0.3; sj[2]=0.55; sj[3]=1.14;
r12=0.05243; r34=0.126; r24= 0.25353; r18=0.026215; r29=0.126765; r310=0.105; r35=0.210; gam4=90.0;
p[3][1]=0.21;
p[3][2]=0.24635;
p[11][1]=0.0;
p[11][2]=-0.121;
p[6][1]=0.0;
p[6][2]=-0.08865;
p[7][1]=0.0;
p[7][2]=-0.08865;
pi=4.0*atan(1.0);
dr=pi/180.0;
gam4=gam4*dr;
w[1]=-57*pi/15; e[1]=0.0; del=5.0;t[6]=0.0;e[6]=0.0;
printf("\n The Kineto-static Analysis of a Six-bar Linkase\n");
printf(" NO THETA1 FR1 BT1 FR2 BT2 TB TB1\n");
printf(" (deg.) (N) (deg.) (N) (deg.) (N.m) (N.m)\n");
if((fp=fopen("file","w"))==NULL)
{
printf("Can't open this file.\n");
exit(0);
}
fprintf(fp,"\n The Kineto-static Analysis of a Six-bar Linkase\n");
fprintf(fp," NO THETA1 FR1 BT1 FR2 BT2 TB TB1\n");
fprintf(fp," (deg.) (N) (deg.) (N) (deg.) (N.m) (N.m)\n");
ic=(int)(360.0/del);
for(i=0;i<=ic;i++)
{
t[1]=(double)(i)*del*dr;
bark(1,2,0,1,r12,0.0,0.0,t,w,e,p,vp,ap);
bark(1,8,0,1,r18,0.0,0.0,t,w,e,p,vp,ap);
rrrk(-1,2,3,4,2,3,r24,r34,t,w,e,p,vp,ap);
bark(3,0,5,3,0.0,r35,0.0,t,w,e,p,vp,ap);
bark(2,0,9,2,0.0,r29,0.0,t,w,e,p,vp,ap);
bark(3,0,10,3,0.0,r310,0.0,t,w,e,p,vp,ap);
rppk(5,6,5,7,4,5,6,0.0,0.0,gam4,&r2,&vr2,&ar2,&r3,&vr3,&ar3,t,w,e,p,vp,ap); rppf(5,11,5,7,5,7,0,7,7,4,5,6,p,vp,ap,t,w,e,fr,fk,pk);
rrrf(2,3,4,9,10,0,5,0,2,3,p,vp,ap,t,w,e,fr);
barf(1,8,2,1,p,ap,e,fr,&tb);
fr1=sqrt(fr[1][1]*fr[1][1]+fr[1][2]*fr[1][2]);
bt1=atan2(fr[1][2],fr[1][1]);
fr2=sqrt(fr[3][1]*fr[3][1]+fr[3][2]*fr[3][2]);
bt2=atan2(fr[4][2],fr[4][1]);
we1=-(ap[8][1]*vp[8][1]+(ap[8][2]+9.81)*vp[8][2])*sm[1]-e[1]*w[1]*sj[1];
we2=-(ap[9][1]*vp[9][1]+(ap[9][2]+9.81)*vp[9][2])*sm[2]-e[2]*w[2]*sj[2];
we3=-(ap[10][1]*vp[10][1]+(ap[10][2]+9.81)*vp[10][2])*sm[3]-e[3]*w[3]*sj[3]; we4=-(ap[5][1]*vp[5][1]+(ap[5][2]+9.81)*vp[5][2])*sm[4];
extf(p,vp,ap,t,w,e,7,fe);
we5=-ap[7][1]*vp[7][1]*sm[5]+fe[7][1]*vp[7][1];
tb1=-(we1+we2+we3+we4+we5)/w[1];
printf("%3d%6.0f%11.3f%11.3f%11.3f%11.3f%11.3f%11.3f\n",
i,t[1]/dr,fr1,bt1/dr,fr2,bt2/dr,tb,tb1);
fprintf(fp," %3d%6.0f%11.3f%11.3f%11.3f%11.3f%11.3f%11.3f\n",
i,t[1]/dr,fr1,bt1/dr,fr2,bt2/dr,tb,tb1);
tbdraw[i]=tb;
tb1draw[i]=tb1;
fr1draw[i]=fr1;
sita1[i]=bt1;
fr2draw[i]=fr2;
sita2[i]=bt2;
fr3draw[i]=fr2;
sita3[i]=bt2;
if(i%16==0) getch();}
fclose(fp);
getch();
draw2(del,tbdraw,tb1draw,ic);
draw3(del,sita1,fr1draw,sita2,fr2draw,sita3,fr3draw,ic);}
extf(p,vp,ap,t,w,e,nexf,fe)
double p[20][2],vp[20][2],ap[20][2],t[10],w[10],e[10],fe[20][2];
int nexf;
{ fe[nexf][1]=-15288*ap[nexf][1];
fe[nexf][2]=0.0; }
sita3[i]=bt3;/*将运动副反力的大小和方向传给数组供绘图使用,因为绘制反力失端图的子程序已设为画三个力的失端图,所以要给六个数组赋值,若只想求出两个力的失端图可以将两个力的大小、方向赋相同的值*/
if((i%16)==0){getch();}
}
fclose(fp);
getch();
draw2(del,tbdraw,tb1draw, ic); /*调用绘图子程序画平衡力矩曲线*/
draw3(del,sita1,fr1draw,sita2,fr2draw,sita3,fr3draw,ic);
/*调用绘图子程序画反力失端曲线*/
} /*程序结束*/
extf(p,vp,ap,t,w,e,nexf,fe) /*工艺阻力子程序*/
double p[20][2],vp[20][2],ap[20][2],t[10],w[10],e[10],fe[20][2];
int nexf;
{
fe[nexf][1]=-10712.52*ap[nexf][1];
fe[nexf][2]=0.0;
}
运行结果:
The Kineto-static Analysis of a Six-bar Linkase
NO THETA1 FR1 BT1 FR2 BT2 TB TB1
(deg.) (N) (deg.) (N) (deg.) (N.m) (N.m)
0 0 288289.826 -148.178 165436.719 -147.995 -7983.091 -7983.091
1 5 292154.80
2 -149.109 163013.361 -148.935 -6701.746 -6701.746
2 10 295723.389 -150.067 160488.102 -149.902 -5298.738 -5298.738
3 15 298972.807 -151.050 157916.015 -150.893 -3791.436 -3791.436
4 20 301786.460 -152.054 155309.039 -151.904 -2199.573 -2199.573
5 25 303944.297 -153.074 152632.71
6 -152.931 -547.538 -547.538
6 30 305121.652 -154.103 149805.97
7 -153.966 1133.155 1133.155
7 35 304900.629 -155.133 146705.267 -155.001 2801.810 2801.810
8 40 302797.163 -156.157 143173.964 -156.029 4407.674 4407.674
9 45 298304.662 -157.164 139037.386 -157.038 5891.000 5891.000
10 50 290951.536 -158.142 134122.739 -158.017 7186.563 7186.563
11 55 280365.827 -159.081 128282.147 -158.955 8229.582 8229.582
12 60 266336.614 -159.968 121415.717 -159.838 8963.331 8963.331
13 65 248860.462 -160.791 113490.809 -160.655 9347.047 9347.047
14 70 228162.790 -161.538 104553.698 -161.392 9362.452 9362.452
15 75 204688.653 -162.199 94730.911 -162.039 9017.314 9017.314
16 80 179063.861 -162.764 84219.614 -162.584 8345.184 8345.184
17 85 152033.546 -163.227 73269.024 -163.016 7401.340 7401.340
18 90 124389.444 -163.583 62157.188 -163.327 6255.861 6255.861
19 95 96898.197 -163.833 51169.497 -163.507 4985.336 4985.336
20 100 70241.011 -163.989 40587.831 -163.540 3664.764 3664.764
21 105 44971.137 -164.093 30707.136 -163.395 2360.936 2360.936
22 110 21491.523 -164.376 21927.895 -162.922 1128.001 1128.001
23 115 332.428 114.434 15088.102 -131.363 5.371 5.371
24 120 19267.354 18.216 12137.935 16.575 -982.339 -982.339
25 125 36467.292 18.307 14368.537 17.442 -1823.885 -1823.885
26 130 51697.444 18.827 19438.652 18.216 -2519.099 -2519.099
27 135 65181.818 19.539 25355.055 19.053 -3076.291 -3076.291
28 140 77217.538 20.389 31509.495 19.978 -3509.743 -3509.743
29 145 88166.570 21.357 37825.020 20.996 -3837.581 -3837.581
30 150 98458.214 22.429 44428.425 22.104 -4080.157 -4080.157
31 155 108605.646 23.594 51570.570 23.298 -4258.990 -4258.990
32 160 119242.222 24.843 59628.529 24.573 -4396.265 -4396.265
33 165 131187.463 26.166 69152.338 25.921 -4514.855 -4514.855
34 170 145560.424 27.555 80959.074 27.334 -4638.841 -4638.841
35 175 163972.339 29.001 96298.762 28.805 -4794.459 -4794.459
36 180 188855.927 30.493 117142.899 30.323 -5011.340 -5011.340
37 185 224033.921 32.022 146689.607 31.880 -5323.508 -5323.508
38 190 275704.068 33.576 190251.466 33.462 -5768.583 -5768.583
39 195 354118.879 35.142 256793.720 35.056 -6380.747 -6380.747
40 200 476275.493 36.705 361446.286 36.644 -7165.682 -7165.682
41 205 669448.077 38.244 528913.829 38.203 -8029.476 -8029.476
42 210 972766.064 39.730 795347.407 39.705 -8608.566 -8608.566
43 2151425482.383 41.1251198297.487 41.109 -7963.204 -7963.204
44 2202016296.736 42.3771730598.444 42.368 -4374.710 -4374.710
45 2252589084.027 43.4312252202.811 43.425 3726.201 3726.201
46 2302843454.806 44.2372487411.442 44.232 14977.326 14977.326
47 2352608606.765 44.7772277167.208 44.770 24280.816 24280.816
48 2402055857.479 45.0701778119.626 45.058 27777.332 27777.332
带式输送机设计方案定稿
页眉内容 济南大学泉城学院 毕业设计方案 题目带式输送机的设计 专业机械设计制造及其自动化 班级机设10Q4 学生董吉蒙 学号012 指导教师顾英妮 二〇一四年三月二十一日
学院泉城学院专业机械设计制造及其自动化 学生董吉蒙学号012 设计题目带式输送机的设计 一、选题背景与意义 随着工业化经济的不断增长,带式输送机作为输送行业中的重要设备,其技术发展已成为输送设备发展更替的重要标志之一。全球化经济的发展和提倡低能环保机械的倡导,设计出低能耗和环保新型带式输送机又成为众多工程技术人员的目标。 目前带式输送机的发展趋势主要集中在长距离、高速度、大运量、大功率等方向,其特点将得到充分的发挥,更具有现代物流发展意义,与传统的直线输送机搭接、汽车等其它运输工具相比具有明显的优点。 生产实践证明,带式输送机与其他运输机械相比,其相关技术指标都表现出明显的优越性,但作为机械设备来讲,都会有自身的不足之处,如通用带式输送机的运动零部件多,维护维修费用大问题、由于托辅的原因带速受限问题,再比如输送机的起动、输送带的振动易跑偏和摩擦起热等问题,近些年来,国内外研究机构对诸如此类的问题都做了大量的研究,相关的科学技术研究取得了重要的突破。 国内研究现状 尽管我国已拥有先进的软起动技术及多机功率平衡技术、中间驱动技术,而且掌握的技术完全可满足煤矿长距离带式输送机的需要,但由于国内输送带技术跟不上国外先进国家,带强受到限制,无法满足高强度带式输送机发展的需要。因此,输送机驱动系统必须尽量减少对输送机各部件的动负荷,控制对输送带的动张力,防止输送带在滚筒上的打滑,减小张紧行程。因此,输送机的起制动要求更高,据有关资料介绍,上运输送机最佳的起动特性曲线应为“S”形,有必要进一步研制新型启动技术和自动张紧技术。 国外研究现状 国外对于无辑式特种带式输送机的研究较早,成果也相对丰富。气垫式带式输送机最初始于荷兰,系统介绍气垫式带式输送机的文献出自荷兰TWERTE大学,一种供运送旅客用的气垫输送机取得专利,另外国外还有供搬集装箱的新型双气垫输送机。国外有关气塾带式输送机的专利有几十项,国外主要的生产厂家有,荷兰的Shiis公司,英国的Simon-Carves和Numec公司等,在初期阶段,国外的气垫带式输送机多用于输送面粉、谷物等密度较小的散状物料,近些年来,幵始用于输送憐酸盐、煤矿等密度较大且刚性大的物料,并逐渐向长距离、高运速和大运量上发展。 - 1 -
摇摆式输送机设计
自动机械课程设计说明书 题目:摆式送料机构总体设计 姓名 学号: 专业:农业机械化及其自动化 班级: 学院:农业工程与食品科学学院 指导教师 2015年7月15日
目录 前言 (2) 第一章课程设计的指导书 (3) §1-1 课程设计目的 (3) §1-2 课程设计任务 (3) 第二章摇摆式输送机设计过程 (4) §2-1 工作原理 (4) §2-2 设计要求及原始数据 (5) §2-3 设计内容及工作量 (5) §2-4 其他设计方案 (5) §2-5 利用解析法确定机构的运动尺寸 (6) §2-6 连杆机构的运动分析 (12) 第三章传动系综合 (14) §3-1 电机的初步选择 (14) §3-2 V带的初步选择 (15) 第四章课程设计总结 (18) 第五章参考文献 (18) 前言
自动机械设计是一门以机构为研究对象的学科。自动机械课程设计是使学生较全面的、系统的巩固和加深自动机械课程的基本原理和方法的重要环节,是培养学生“初步具有确定机械运动方案,分析和设计机械的能力”及“开发创新能力”的一种手段。我们将从机构的运动学以及机器的动力学入手,研究机构运动的确定性和可能性,并进一步讨论机构的组成原理,从几何的观点来研究机构各点的轨迹、位移、速度和加速度的求法,以及按已知条件来设计新的机构的方法。
第一章自动机械设计课程设计指导书 一.自动机械设计课程设计的目的 自动机械设计课程设计是自动机械设计课程教学中最后的一个重要的实践性教学环节,是培养学个进行自动机械总体方案设计、运动方案设计、执行机构选型设计,传动方案设计控制系统设计以及利用用计算机对工程实际中各种机构进行分析和设计能力的一个重要的川练过程。其目的如下: (1)通过课程设计,综合运用所学的知识,解决工程实际问题。并使学生进一步巩固和加深所学的理论知识。 (2)使学生得到拟定机械总体方案、运动方案的训练,并且有初步的机械选型与组合及确定传动方案的能力,培养学生开发、设计、创新机械产品的能力。 (3)使学生掌握自动机械设计的内容、方法、步骤,并对动力分析与设计有个较完整的概念。 (4)进一步提高学生的运算、绘图、表达及运用计算机和查阅有关技术资料的能力。 (5)通过编写说明书,培养学生的表达、归纳及总结能力。 二.自动机械课程设计的任务 自动机械课程设计的任务一般分为以下几部分。 (1)根据给定机械的工作要求,合理地进行机构的选型与组合。 (2)拟定该自动机械系统的总体、运动方案(通常拟定多个),对各运动方案进行对比和选择,最后选定一个最佳方案作为个设计的方案,绘出原理简图。 (3)传动系统设计,拟定、绘制机构运动循环图。 三.课程设计步骤 1.机构设计和选型 (1)根据给定机械的工作要求,确定原理方案和工艺过程。 (2)分析工艺操作动作、运动形式和运动规律。 (3)拟定机构的选型与组合方案,多个方案中选择最佳的。 (4)设计计算。 (5)结构设计、画图。 (6)编写设计计算说明书。 2.自动机械总体方案设计 (1)根据给定机械的工作要求,确定实现功能要求原理方案。 (2)根据原理方案确定工艺方案和总体结构。 (3)拟定工作循环图。 (4)设计计算。 (5)画图。 (6)编写设计计算说明书。 3.自动机械传动系统设计 (1)分析工艺操作动作、各机构运动形式和运动规律选择动力机。 (2)确定传动机构方案和采用的传动形式,多个方案中选择最佳的。 (3)传动比分配、设计计算。 (4)传动系统结构设计。 (5)结构设计、画图。 (6)编写设计计算说明书。 四.基本要求
带式输送机选型设计
目录 1设计方案 (1) 2带式输送机的设计计算 (1) 2.1 已知原始数据及工作条件 (1) 2.2 计算步骤 (2) 2.2.1 带宽的确定: (2) 2.2.2输送带宽度的核算 (5) 2.3 圆周驱动力 (5) 2.3.1 计算公式 (5) 2.3.2 主要阻力计算 (6) 2.3.3 主要特种阻力计算 (8) 2.3.4 附加特种阻力计算 (9) 2.3.5 倾斜阻力计算 (10) 2.4传动功率计算 (10) P)计算 (10) 2.4.1 传动轴功率( A 2.4.2 电动机功率计算 (10) 2.5 输送带张力计算 (11) 2.5.1 输送带不打滑条件校核 (11) 2.5.2 输送带下垂度校核 (12) 2.5.3 各特性点张力计算 (13) 2.6 传动滚筒、改向滚筒合张力计算 (14) 2.6.1 传动滚筒合张力计算 (14) 2.6.2 改向滚筒合张力计算 (16) 2.7 初选滚筒 (17) 2.8 传动滚筒最大扭矩计算 (18) 2.9拉紧力计算 (18) 2.10绳芯输送带强度校核计算 (18) 3技术可行性分析 (18) 4经济可行性分析 (19) 5结论 (20)
带式输送机选型设计 1、设计方案 将现主平硐延伸与一水平皮带下山相连,在二水平皮带下山机头重新布置一条运输联络巷与一水平皮带下山搭接。 平硐、一水平皮带下山采用一条皮带,取消了原二水平皮带运输斜巷、+340煤仓、+347煤仓、+489煤仓。改造后巷道全长1783m,其中平硐+4‰,1111m,下山 12.5°,672米。 1-1皮带改造后示意图 2、带式输送机的设计计算 2.1 已知原始数据及工作条件 带式输送机的设计计算,应具有下列原始数据及工作条件资料 (1)物料的名称和输送能力: (2)物料的性质: 1)粒度大小,最大粒度和粗度组成情况; 2)堆积密度; 3)动堆积角、静堆积角,温度、湿度、粒度和磨损性等。 (3)工作环境、露天、室内、干燥、潮湿和灰尘多少等; (4)卸料方式和卸料装置形式; (5)给料点数目和位置; (6)输送机布置形式和尺寸,即输送机系统(单机或多机)综合布置形式、地形条件和供电情况。输送距离、上运或下运、提升高度、最大倾角等; (7)装置布置形式,是否需要设置制动器。
带式运输机的传动机构
带式运输机的传动机构 目录 图 2 .3 9 4 4 1 4 8 8 5 1 设计任务书----------------------------------------------------------------------------------------------1 2、电动机的选择及传动装置的运动和动力参数计算-------------------------------3 3、传动零件的设计计算(确定齿轮传动的主要参数)---------------------------6 4、轴的设计计算及校核及滚动轴承的选择和计算---------------------------------16 5、箱体设计及说明---------------------------------------------------------------------------27 6、键联接的选择和计算--------------------------------------------------------------------29 7、联轴器的选择------------------------------------------------------------------------------31 8、润滑和密封的选择-----------------------------------------------------------------------32 9、减速器附件的选择及说明--------------------------------------------------------------32 10、设计总结-----------------------------------------------------------------------------------33 参考资料-------------------------------------------------------------------------------------33
机械原理课程设计摇摆式输送机
机械原理课程设计 摇摆式输送机说明书 负责人:何竞飞 学院:机电工程学院 班级:机械1102班 学号: 0806110229 日期: 2013年 7月1 日
目录 1.设计任务及原始参数…………………………………………… 2.运动方案设计…………………………………………………… 2.1 主机构方案………………………………………………… 2.2 电动机——主机构(齿轮传动机构方案)……………… 2.3 总体方案图………………………………………………… 3. 电动机选择………………………………………………………. 3.1 电动机型号……………………………………………… 3.2 电动机的功率…………………………………………… 4. 传动比分配……………………………………………………… 5. 齿轮机构设计…………………………………………………… 5.1齿轮参数选择………………………………………………… 5.2变位齿轮设计………………………………………………… 6. 主机构设计……………………………………………………… 7. 主机构运动分析………………………………………………… 8. 主机构受力分析………………………………………………… 9. 主机构速度波动调节…………………………………………… 9.1等效力矩确定……………………………………………… 9.2最大盈亏功计算…………………………………………… 9.3等效转动惯量计算………………………………………… 9.4飞轮转动惯量计算…………………………………………
10. 设计总结………………………………………………………… 1. 课程设计的任务 机械原理课程设计的任务是对机器的主体机构进行运动分析、动态静力分析,求出所有的运动副反力及平衡力矩。要求学生根据设计任务,绘制必要的图纸(或编制计算程序),编写设计计算说明书。 要达到课程设计的目的,必须配以课程设计的具体任务:按照选定的机械总功能要求,分解成分功能,进行机构的选型与组合;设计该机械系统的几种运动方案,对各运动方案进行对比和选择;对选定方案中的机构——连杆机构、凸轮机构、齿轮机构,其他常用机构,组合机构等进行运动分析与参数设计;通过计算机编程,将机构运动循环图在计算机屏幕上动态地显示出来,并给出相应的运动参数值。 原始数据: 参数项目 物料重量G(Kg)曲柄转速n4 (r/min) 行程速比系数K 位置角Φ1 (°) 3120 114 1.2 60
带式运输机课程设计
课程设计报告 二级展开式圆柱齿轮减速器 姓名: 学院:物理与机电工程学院 系别:机电工程系 专业:机械设计制造及其自动化年级:2003 学号:03150117 指导教师:冯永健 2006年6月29日
一.设计题目 设计一用于卷扬机传动装置中的两级圆柱齿轮减速器。轻微震动,单向运转,在室内常温下长期连续工作。卷筒直径D=500mm,运输带的有效拉力F=10000N, 卷筒效率 5 η=0.96,运输带速度0.3/v m s =,电源380V ,三相交流. 二.传动装置总体设计: 1. 组成:传动装置由电机、减速器、工作机组成。 2. 特点:齿轮相对于轴承不对称分布,故沿轴向载荷分布不均匀,要求轴有较大的刚度。 3. 确定传动方案:考虑到电机转速高,传动功率大,将V 带设置在高速级。 其传动方案如下: 三.选择电动机 1.选择电动机类型: 按工作要求和条件,选用三相笼型异步电动机,封闭型结果,电压380V ,Y 型。 2.选择电动机的容量 电动机所需的功率为: W d a P P = η KW 1000 W FV P = KW 所以 1000d a FV P = η KW 由电动机到运输带的传动总功率为 1a 422345 η=η?η?η?η?η
1 η—带传动效率:0.96 2η—每对轴承的传动效率:0.99 3η—圆柱齿轮的传动效率:0.96 4 η—联轴器的传动效率:0.99 5 η—卷筒的传动效率:0.96 则:4210.960.990.960.990.960.79a 422345η=η?η?η?η?η=????= 所以 94650.3 3.8100010000.81d a FV p η= ?==?KW 3.确定电动机转速 卷筒的工作转速为 601000 6010000.3 11.46 500V n D ???= = =∏∏?r/min 查指导书第7页表1:取V 带传动的传动比2i =~4带;二级圆柱齿轮减速器传动比840i =~减速器,所以总传动比合理范围为16160i =~总,故电动机转速的可选范围是: n n i =?=(16~160)?11.46=183~1834总 卷筒电机r/min 符合这一范围的同步转速有750、1000和1500r/min 。 根据容量和转速,由有关手册查出有三种适用的电动机型号,因此有四种传动比方案如下: 方案 电动机型号 额定功率 KW 同步转速 r/min 额定转速 r/min 重量 N 总传动比 1 Y112M- 2 4 1500 1440 470 125.65 2 Y132M1-6 4 1000 960 730 83.77 3 Y160M1-8 4 750 720 1180 62.83 综合考虑电动机和传动装置的尺寸、重量和带传动、减速器的传动比,可见第二方案比较适合。因此选定电动机型号为Y132M1-6,其主要参数如下;
带式输送机的结构及工作原理
调研报告 调研时间:2013年11月5日—12日 调研地点:五矿己二扩大皮带巷 调研目的:通过此次调研,使我对式输送机的结构及工作原理有了更深的了解,对教学中如何使理论与实践的结合,如何让学生更加深入的了解课程的内容。能够加强对从业人员的培训、教育,使职工能够更加系统的了解带式输送机的结构及工作原理。 关于带式输送机的结构及工作原理
一、带式输送机的类型及适用条件 带式输送机按牵引方式不同,可分为滚筒驱动式和钢丝绳牵引式两类。一般矿井采区多用滚筒驱动式,大巷中使用较多的也是滚筒驱动式,但也有用钢丝绳牵引式的,主井带式运输一般采用钢丝绳牵引式。 带式输送机既可用于水平运输,又可用于倾斜运输。当用于倾斜运输时其倾角受到一定限制。通常情况下,倾斜向上运输时的倾角不超过18度,向下运输时的倾角不超过15度。为减小输送带的严重磨损,带式输送机不宜运送有棱角的货物。 二、带式输送机的结构及工作原理 (一)带式输送机的组成 带式输送机的组成部分有:机头部(包括电动机、传动装置、滚筒等)、机身部(包括机架、托辊)、机尾部、胶带、附属装置(包括拉紧装置、清扫装置、制动装置等)等 (二)带式输送机的工作原理 输送带(或钢丝绳)连接成封闭环形,用张紧装置将它们张紧,在电动机的驱动下,靠输送带(或钢丝绳)与驱动滚简(或驱动轮)之间的摩擦力,使输送带(或钢丝绳)连续运转,从而达到将货载由装载端运到卸载端的目的。 (三)带式输送机的结构 现以滚筒驱动带式输送机为例,简单介绍带式输送机的基本结构。
带式输送机的主要组成部分有:输送带、托架及机架、传动装置、拉紧装置、储带装置和清扫装置等。 1.输送带 输送带既是承载机构,又是牵引机构。 输送带种类很多。按带芯结构材料分为钢丝绳芯输送带、尼龙芯输送带、维棉芯输送带和帆布芯输送带。输送带按覆盖层所用的材料分为橡胶带、橡塑带和塑料带;按用途分为耐热、耐寒、耐油、耐酸、耐碱和花纹等输送带;按阻燃性能分为非阻燃带和阻燃带。 常用的输送带有3种类型,即普通输送带、钢丝绳芯输送带和钢丝绳牵引输送带。在这里只介绍前两种输送带的结构。 (1)普通输送带。普通输送带可用在固定式、绳架吊挂式和可伸缩带式输送机上。 夹层输送带用数层帆布做带芯,层与层之间用橡胶粘合在一起,然后在外表面周围用橡胶盖层加以保护。帆布由棉、尼龙等纤维织成或为混纺物。帆布层用来承受载荷并传递牵引力,而橡胶保护层用来防止外界物体对帆布层的损伤及有害物质的腐蚀。 (2)钢丝绳芯输送带。此输送带是用细钢丝绳做带芯(以承受拉力),外面覆盖橡胶制成强力输送带。 (3)输送带的性能要求。由于煤矿井下存在有害有毒气体,加之带式输送机的摩擦传动,所以井下使用的输送带必须符合《煤矿安全规程》的有关性能要求。 所谓阻燃输送带是指在生产输送带过程中,加入一定量的阻燃剂
机械原理铁板运输机课程设计
课程设计成果说明书 题目:铁板输送机设计 学生姓名: 学号: 学院: 班级: 指导教师: 同组者: 2012年6月 18 日
目录 设计任务书 (4) 第1章总论及设计要求 (5) 1.1功能要求 (5) 1.2工作原理及工艺动作流程图 (5) 第2章动力源的选择 (6) 2.1原动机的选择 (6) 2.2电动机的型号选择 (6) 第3章传动机构的设计 (8) 3.1传动机构方案设计 (8) 第4章执行机构选择 (9) 4.1间歇送料机构的选择 (9) 4.2形态学矩阵 (10) 第5章机械运动系统方案的拟定 (11) 5.1拟定的方案 (11) 第6章机构运动循环图 (13) 6.1运动循环图的确定 (13) 6.2运动循环图的绘制 (13) 第7章机构的运动学及动力学尺度设计计算 (15)
7.1尺寸计算 (15) 第8章机械运动方案评价 (18) 8.1评价方案表 (18) 结束语 (21) 参考文献 (21)
设计任务书 书中设计题目,参数仅写自己的参数 [1 ] 原始数据和设计要求 ①每次输送铁板长度为1900mm、2000mm或2200mm(设计时任选一种); ②剪断工艺所需时间约为铁板输送周期的1/15.要求铁板停歇时间不超过剪断工艺时间的1.5倍,以保证有较高的生产率; ③输送机构运转应平稳,振动和冲击应尽量小(即要求输送机构从动件的加速度曲线连续无突变)。 [2] 运动方案构思提示 执行构件的间歇送进运动可以考虑采用两个辊轮将铁板压紧,依靠辊轮和铁板间的摩擦力将铁板从卷料上拉出并推向前进的输送方式。棘轮机构、槽轮机构和不完全齿轮机构等都有可能改造成使辊轮作短暂停歇的机构,它们具有结构简单、制造方便、运动可靠等优点,但在动力性能和动停比等方面不能满足设计要求,所以应该采用组合机构。 [3] 参考传动方案
摇摆式输送机设计说明书
) 机械原理课程设计说明书、 题目:摇摆式输送机 学院:机电工程学院 > 班级:机械092 学号:4216 ( 设计者陈觉石 指导教师凌轩 2011 年 7 月 2日
目录 | 第一章机械原理课程设计前言 (2) §1-1 课程设计的目的 (3) §1-2 课程设计的任务 (3) 第二章:摇摆式输送机设计过程 (4) §2-1 工作原理 (4) §2-2 设计要求和原始数据 (5) §2-3 设计内容及工作量 (6) §2-4 其他设计方案 (6) ; §2-5 利用作图法确定机构的运动尺寸 (7) §2-6 连杆机构的运动分析 (8) (一)、速度分析 (9) (二)、加速度分析 (11) 第三章:课程设计总结 (19) 参考文献 (20) #
第一章机械原理课程设计前言 机械原理是一门以机器和机构为研究对象的学科。机械原理课程设计是使学生较全面的、系统巩固和加深机械原理课程的基本原理和方法的重要环节,是培养学生“初步具有确定机械运动方案,分析和设计机械的能力”及“开发创新能力”的一种手段。我们将从机构的运动学以及机器的动力学入手,研究机构运动的确定性和可能性,并进一步讨论的组成原理,从几何的观点来研究机构各点的轨迹、位移、速度和加速度的求法,以及按已知条件来设计新的机构的方法。 机械原理课程设计所研究的问题又可归纳为二类: (1)、根据已有的机构和主要参数来分析该机构和所组成机构的各种特性,即结构分析,运动分析。 》 (2)、根据预期的各种特性来确定新的机构的形式,结构和参数,即机构的设计问题,如机构的运动设计,机构的平衡设计以及速度的调节。 电子计算机的应用为此次课程设计提供方便,我们可以利用AutoCAD作图,SolidWorks建模并仿真,从而能看到机构的运动。 §1-1 课程设计的目的 机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析的训练,是机械原理课程的一个重要的实践性教学环节。其目的是:(1)、进一步加深学生所学的理论知识。 (2)、培养学生独立解决有关本课程实际问题的能力,使学生对于机械运动学和动力学
SZJ1000A型直线摆动式装船机结构特性(精)
SZJ1000A 型直线摆动式装船机结构特性 福州港务局陈宗生 近年来 , 国内外建筑行业对河沙的需求量逐渐增多 , 为适应这一市场变化 , 福州港新近投产了一座砂石散货码头。采用了较为先进的散货装卸工艺 , 即 :驳船卸船机带式输送机堆场 (堆料机、取料机带式输送机装船机海船 , 形成每小时接卸 800t, 装船 1000t 河沙的生产能力。装卸过程所采用的 SZJ1000A 型直线摆动式装船机生产率为 1000t/h, 其结构合理 , 生产率较高 , 试运行以来 , 工作正常 , 基本达到了设计要求。下面简要介绍其结构特性。 1 装船工艺及单机主参数 SZJ1000A 型直线摆动式装船机结构形式如图 1所示 , 在码头装船作业过程中 , 它承接后方堆场带式输送机送来的河沙 , 通过装船机上的带式输送机 10送入悬臂梁 2前端的溜筒 1, 将河砂装入海船。该装船机连续作业 , 是一种比较适合于散货码头的 装船设备。
图 1 装船机结构示意图 1 溜筒机构 2 悬臂梁 3 司机室
4 门架拉杆系统 5 主梁 6 伸缩补偿变幅系统 7 机器房 8 后支承装置 9 伸缩系统10 带式输送机 11 运行系统 12 前支承装置 13 海船 福州港河砂码头受地理位置和地形的影响 , 后方堆场比较狭窄 , 码头前沿装船机既要满足大型船舶的装船需要 , 又要适应后方比较狭小的堆场 , 装船机前后支承跨度较大 , 普通结构形式的装船机不能 满足要求 , 该机采用直线摆动式结构 , 实践证明 , 这种方案是可行的 , 装船机主参数如下 : 生产率 1000t/h 物料 (河砂密度 1 5~1 7t/m 3 含水量 10%装机功率 240kW 主梁跨距 29~46m 运行范围 (摆动 ! 51?伸缩行程 27m 悬臂变幅范围 0? ~25?溜筒伸缩行程 12m 运行机构轨距 5m 最大轮压 25t 整机自重 290t 2 结构特性 (1 直线摆动为适应对 5000~20000t 船舶装砂和码头地形的需要 , 装船机结构采用了如图 2所示的直线摆动式 , 即其前支承装置由转盘、立柱、支腿和车轮等主要部件构成。其功能是同后支承装置一起支承卸船机整体 , 并使装船机沿着码头前沿两条轨道直线运行 , 由两根箱形梁组成的主梁 3与前支承装置的转盘铰接。后支承装置由滚轮、滚轮架、转盘和底座等构成 , 底座是钢筋混凝土结 图 2 装船机工作摆动形式 1 前支承装置轨道中心线 2 后支承装置中心 3 主梁 4 前支承装置中心 5 悬臂梁 6 海船
带式运输机设计说明书
机械设计课程设计 设计题目: 带式运输机传动装置的设计 设计者:黄*棋 学院:能源与动力工程学院 班级: **1604 日期: 2019 年 1月 7 日~ 1 月 18 日指导老师:王劲松
目录 设计任务书 (2) 一、传动方案的拟定及电动机的选择 (3) 二、V带的设计计算 (7) 三.齿轮传动设计计算 (8) 四、轴的设计计算 (12) 2减速器高速轴及附件的设计计算 (12) 2减速器低速轴及其附件的设计计算 (15) 3附件汇总 (17) 五、减速器箱体及附件设计 (18) 六、润滑与密封 (19) 七、设计小结 (20) 八、参考资料目录 (20)
带式运输机传动装置的设计 1.设计题目 带式运输机传动装置。 传动装置简图如右图所示。 (1)带式运输机数据 传动装置总效率约为?=82%。 (2)工作条件 使用年限8年,每天工作8小时。载荷平稳,环境清洁。 空载启动,单向、连续运转。 2.设计任务 1)完成带式运输机传动方案的设计和论证,绘制总体设计原理方案图; 2)完成传动装置的结构设计;确定带传动的主要参数及尺寸;齿轮减速箱的设计; 3)减速器装配图一张;(零号图纸) 零件图若干张;(折合零号图纸一张) 4)设计说明书一份。(正反十页以上,8000~10000字) 4.说明书内容 ①根据运输带的参数,选择合适的电动机,分配各级传动比,并计算传动装置各轴的运动和动力参数。 ②减速器外传动零件设计:普通V带传动。 ③减速器内传动零件设计:闭式一级(展开式二级)圆柱齿轮传动。 ④其他结构设计。
第一章 传动方案的拟定及电动机的选择 1.1拟定传动方案 本组选择1号数据进行设计 由已知条件计算驱动滚筒的转速n ω,即 5.953206 .1100060100060≈??=?= π πυωD n r/min 一般选用同步转速为1000r/min 或1500r/min 的电动机作为原动机,因此传动装置传动比约为10或15。根据总传动比数值,初步拟定出以二级传动为主的多种传动方案。一级传动采用皮带轮减速装置,二级减速装置采用I 级传动齿轮,这样传动比分配为3~5 。 1.2选择电动机 1)电动机类型和结构型式 按工作要求和工作条件,选用一般用途的Y (IP44)系列三相异步电动机。它为卧式封闭结构。 2)电动机容量 (1)滚筒输出功率P w () kw n T 3.19550 5.951309550P =?=?= ωω (2)电动机输出功率P kw d 59.1% 823 .1P P == = η ω 根据传动装置总效率及查表得:V 带传动?1=0.945;滚动轴承?2 =0.98;圆柱齿轮传动 ?3 =0.97;弹性联轴器?4 =0.99;滚筒轴滑动轴承?5 =0.94。 (3)电动机额定功率P ed
机械原理课程设计--摇摆式输送机
机械原理课程设计--摇摆式输送机
机械原理课程设计 摇摆式输送机说明书 负责人:何竞飞 学院:机电工程学院 班级:机械1102班 学号: 0806110229 日期: 2013年 7月1 日
目录 1.设计任务及原始参数…………………………………………… 2.运动方案设计…………………………………………………… 2.1 主机构方案………………………………………………… 2.2 电动机——主机构(齿轮传动机构方案)……………… 2.3 总体方案图………………………………………………… 3. 电动机选择………………………………………………………. 3.1 电动机型号……………………………………………… 3.2 电动机的功率…………………………………………… 4. 传动比分配……………………………………………………… 5. 齿轮机构设计…………………………………………………… 5.1齿轮参数选择………………………………………………… 5.2变位齿轮设计………………………………………………… 6. 主机构设计……………………………………………………… 7. 主机构运动分析………………………………………………… 8. 主机构受力分析………………………………………………… 9. 主机构速度波动调节…………………………………………… 9.1等效力矩确定……………………………………………… 9.2最大盈亏功计算…………………………………………… 9.3等效转动惯量计算………………………………………… 9.4飞轮转动惯量计算…………………………………………
1. 课程设计的任务 机械原理课程设计的任务是对机器的主体机构进行运动分析、动态静力分析,求出所有的运动副反力及平衡力矩。要求学生根据设计任务,绘 制必要的图纸(或编制计算程序),编写设计计算说明书。 要达到课程设计的目的,必须配以课程设计的具体任务:按照选定的机械总功能要求,分解成分功能,进行机构的选型与组合;设计该机械 系统的几种运动方案,对各运动方案进行对比和选择;对选定方案中的机 构——连杆机构、凸轮机构、齿轮机构,其他常用机构,组合机构等进行 运动分析与参数设计;通过计算机编程,将机构运动循环图在计算机屏幕 上动态地显示出来,并给出相应的运动参数值。 原始数据: 参数项目 物料重量G(Kg)曲柄转速n4 (r/min) 行程速比系数K 位置角Φ1 (°) 3120 114 1.2 60
带式输送机的设计论文
带式输送机的设计论文 Prepared on 22 November 2020
摘要带式输送机在当今社会应用日益广泛,当然一个产品也需要不断的研发和更新,才能永保活力。我所做的单托辊全封闭带式输送机就是在一些方面进行了改进,首先用单托辊代替槽型托辊以防止跑偏,其次在输送机外加外罩来防止污染,美化环境,再次螺旋拉紧装置保证了运行的稳定和可靠性等。这些结构和技术保证了带式输送机的整机性能优良,输送量大,带速快,高效节能。 通过对国内外带式输送机技术现状的分析,得出了其在以后的发展趋势;在对带式输送机的各部件进行设计与选择,得出了对其整体的设计与选择;在其计算中验证了带式输送机的各部件满足了它的功能要求,另外输送机在设计的过程中考虑到了工作环境,运行过程中皮带易磨损等问题进行了加外罩和单托辊结构,是本输送机与其他机器的不同之处!可以使输送机在更广的范围,更可靠的运行。 关键词: 带式输送机、单托辊、螺旋拉紧装置。 目录
第四节控制系统的设计 (12) 21 致谢 (22) 前言 运输机又称带式输送机,是一种连续运输机械,也是一种通用机械。皮带运输机被广泛应用在港口、电厂、钢铁企业、水泥、粮食以及轻工业的生产线。即可以运送散状物料,也可以运送成件物品 ,堆取料机,堆料机,取料机,皮带机,发电等。 在煤矿的开采过程中,带式输送机的作用至关重要,其性能的好坏直接影响到煤矿行业的发展和效益,因此研究带式输送机对煤矿行业和其他一些输送类的行业有着非常重要的意义。带式输送机的工作环境一般情况下都比较恶劣,对带式输送机的性能要求也很高,在研究的同时,对其性能进行分析与提高也式目前输送行业中不可缺少的重要部分。在本次设计中的带式输送机采用了全封闭式结构,对带式输送机的工作环境恶劣的方面进行了一些改进。
带式运输机设计计算
《机械设计》 课程教学改革项目二 带式运输机设计计算 专业: 班级: 姓名: 学号: 指导教师: 完成日期: 2014年 5 月 5 日
目 录 一 设计任务书 (4) 一、设计题目 ..................................................................................................................................... 4 二、传动方案 ..................................................................................................................................... 5 三、工作条件 ..................................................................................................................................... 5 四、设计内容 ..................................................................................................................................... 5 二 确定电动机的功率和转速 . (6) 1. 确定电动机的功率和转速 ............................................................................................................ 6 2.卷筒轴的输出功率 ....................................................................................................................... 6 3. 传动装置的总效率 ........................................................................................................................ 6 4. 确定电动机的转速 ........................................................................................................................ 6 选择电动机的类型: ......................................................................................................................... 7 计算传动装置的的运动和动力参数 . (7) 1)各轴的转速 ........................................................................................................................... 7 2)各轴的输入功率 ................................................................................................................... 8 3)各轴的转矩 .. (8) 三 V 带传动计算 (9) 1 确定计算功率ca P (9) 2 选择V 带的型号 (9) 3确定带轮的基准直径d d 并验算带速ν (9) 1) 初选小带轮的基准直径1d d ................................................................................................. 9 2) 验算带速ν ........................................................................................................................... 9 3)计算大带轮的基准直径 ....................................................................................................... 9 4 确定V 带的中心距a 和基准长度d L ................................................................................ 10 1)初选0a ............................................................................................................................... 10 2) 计算带所需基准长度0d L ................................................................................................ 10 3) 计算实际中心距a ............................................................................................................. 10 5 验算小带轮上的包角 1α (10) 6 计算带的根数z .......................................................................................................................... 11 1) 计算单根V 带的额定功率r P ............................................................................................ 11 2) 计算V 带的根数z ............................................................................................................ 11 7计算单根V 带的初拉力0F .......................................................................................................... 11 8计算压轴力p F .............................................................................................................................. 11 9 主要设计结论 ............................................................................................................................... 12 四 齿轮传动计算 . (12) 1选择材料及确定需用应力 (12) 1)选取压力角 ......................................................................................................................... 12 2)选取精度等级 ..................................................................................................................... 12 3)材料的选择 ......................................................................................................................... 12 4)齿数选择 ............................................................................................................................. 13 2按齿面接触疲劳强度设计 (13)
摇摆式运输机机构分析
摇摆式运输机机构分析 摇摆式运输机是一种水平传送材料用的机械,由齿轮机构和六连杆机构等组成。如图所示。电动机1通过传动装置2使曲柄4回转,再经过六连杆机构使输料槽9作往复移动,放置在槽上的物料10借助摩擦力随输料槽一起运动。物料的输送是利用机构在某些位置输料槽有相当大的加速度,使物料在惯性力的作用下克服摩擦力而发生滑动,滑动的方向恒自左往右,从而达到输送物料的目 的。 1——电机2——传动装置3——执行机构 图1摇摆式输送机示意图 一、设计要求 该布置要求电机轴与曲柄轴垂直,使用寿命为5年,每日二班制工作。输送机在工作过程中,载荷变化较大,允许曲柄转速偏差为±5%,六连杆执行机构的最小传动角不得小于40°,执行机构的传动效率按0.95计算,按小批量生产规模设计。
1.首先进行机构的结构分析并对机构进行杆组分析。 2.进行运动分析,绘制料槽的位移s、速度v及加速度a的线图。 3.进行动态静力分析,绘制出固定铰链点的反力矢端图及平衡力矩T5线图。 4.计算装在o1轴上的飞轮惯量J1。 5.选好电机后并对传动比进行分配和对齿树确定。 6. 二、机构的运动分析 1、杆长计算。
选择书中第7组数据进行计算及分析。 利用autocad2009软件精确制图,并量出两处需要的杆长。作图如上。得出: l OB1=201.1mm ,l OB2=305.96mm.得出l OA=52.43mm,l AB=253.53mm,l=210mm,h=335mm,l CD=210mm,G=2875kg,l DB=126mm,n4=120r/min, f= 0.35, 2、杆组的拆分方法