有限元学习心得
有限元学习心得
吴清鸽车辆工程 50110802411
短短八周的有限元课已经结束。关于有限元,我一直停留在一个很模糊的概念。我知道这是一个各个领域都必须涉及的点,只要有关于CAE分析的,几乎都要涉及有限元。总体来说,这是一门非常重要又有点难度的课程。
有限元方法(finite element method) 或有限元分析(finite element analysis),是
求取复杂微分方程近似解的一种非常有效的工具,是现代数字化科技的一种重要
基础性原理。将它用于在科学研究中,可成为探究物质客观规律的先进手段。将
它应用于工程技术中,可成为工程设计和分析的可靠工具。本课程教学基本内容
有固体力学和结构力学简介;有限元法基础;桁架、梁、刚架、二维固体、板和
壳、三维固体的有限元法;建模技术;热传导问题的有限元分析;PATRAN软件
的使用.
通过有限元分析课程学习使我了解和掌握了一些有限元知识:
1.简要了解二维和三维固体以及桁架、梁和板结构的三组基本力学方程,即表示位移-应变关系的几何方程,表示应力-应变关系的本构方程和表示内力-外力关系的平衡方程。
2.了解利用能量法形成有限元离散系统方程的基本原理,即哈密尔顿原理。掌握有限元分
析的基本方法及步骤,包括域的离散、位移插值、构造形函数、单元有限元方程
的建立、坐标变换、整体有限元方程的组装、整体有限元方程的求解技术。
3.具体深入的了解并掌握桁架结构、梁结构、刚架结构、二维固体、板和壳结构、三维固体的有限元法分析技术,包括他们具体的形函数构造,应变矩阵,局部坐标系和整体坐标系中的单元矩阵。各种结构的实例研究。
4.了解并掌握建立高质量建模所涉及的各种关键技术。包括单元类型的选择,单元畸形的限制,不同阶数单元混用时网格的协调性问题,对称性的应用(平面对称、轴对称、旋转对称、重复对称),由多点约束方程形成刚域及应用(模拟偏移、不同自由度单元的连接、网格协调性的施加)等,以及多点约束方程的求解。以PATRAN有限元通用软件为例了解一般商业有限元软件的组成及结构。掌握PATRAN软件的基本使用。利用PATRAN软件上机实践完成两个上机练习:刚架结构有限元分析和三维固体有限元分析。
课程的具体学习内容:
内容:
1.三节点三角形单元:单元分析、总刚度矩阵组装、引入约束条件修正总刚度
矩阵、载荷移置、方程求解;
2.四边形单元分析、四节点四面体单元分析、八节点六面体单元分析;
3. 其他常用单元形函数、自由度。
1、三节点三角形单元 1.1. 单元分析
1.1.1 分析步骤
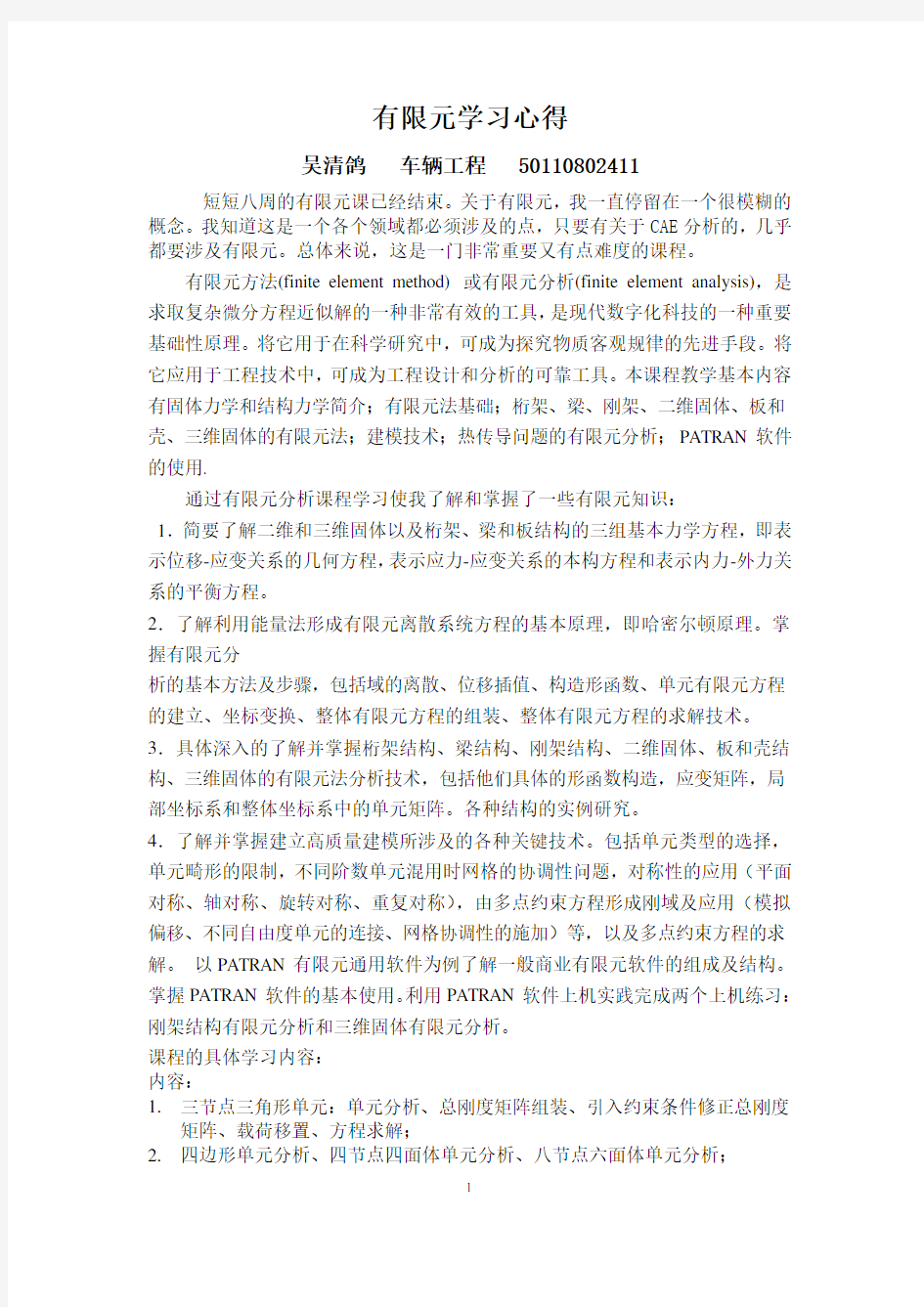
单元分析的任务是建立单元平衡方程,形成单元刚度矩阵。不失一般性,从图1-1三角形离散结构中任取一个单元,设单元编号为e ,单元节点按右手法则顺序编号为 i, j, m,在定义的坐标系xOy 中,节点坐标分别为(xi+yi),(xj+yj),(xm+ym),节点位移和节点力表示如图1-1所示。
取结点位移作基本未知量。由结点位移求结点力:
其中,转换矩阵称为单元刚度矩阵。单元分析的主要目的就是要求出单元刚度矩阵。
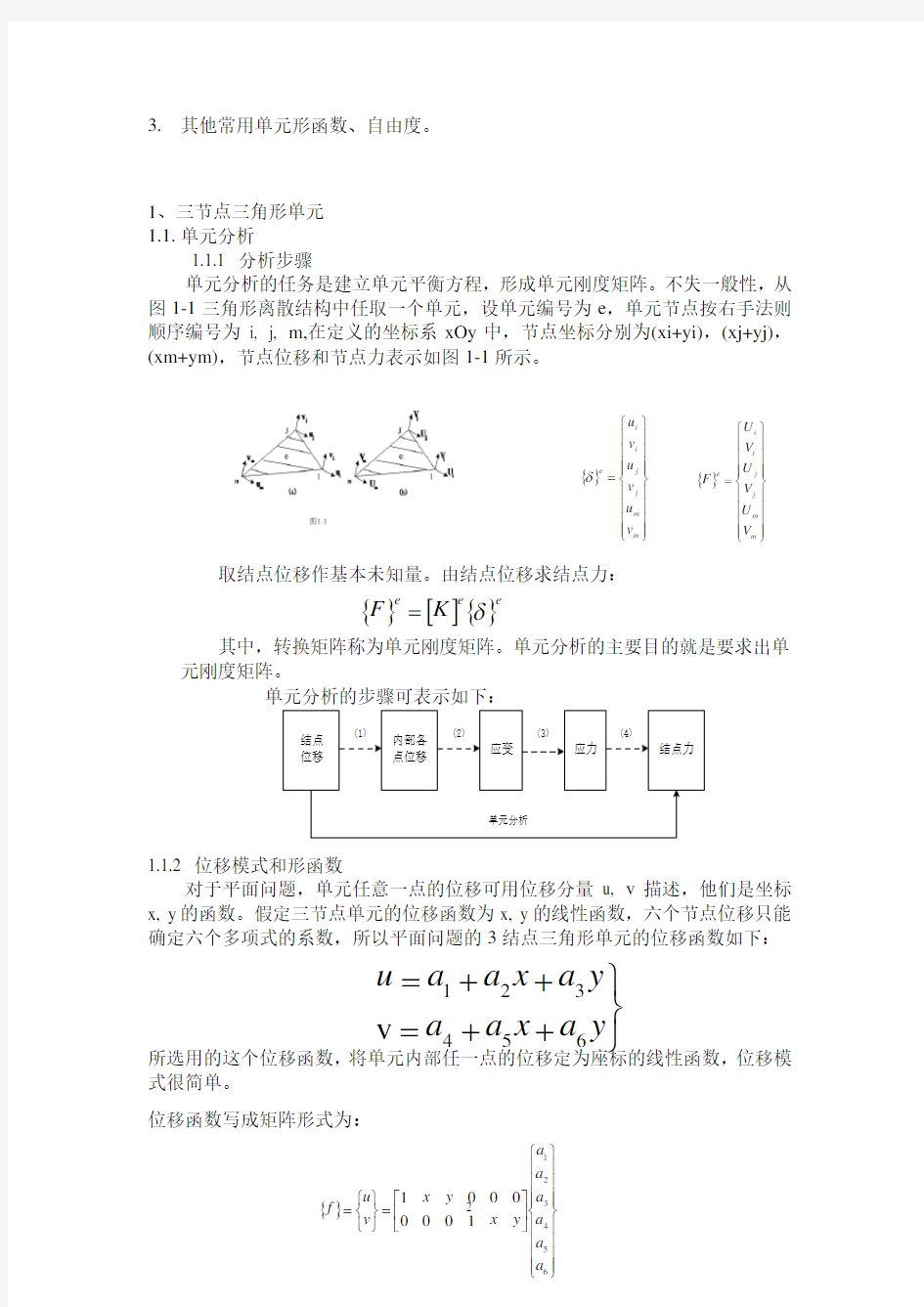
1.1.2 位移模式和形函数
对于平面问题,单元任意一点的位移可用位移分量u, v 描述,他们是坐标x, y 的函数。假定三节点单元的位移函数为x, y 的线性函数,六个节点位移只能确定六个多项式的系数,所以平面问题的3结点三角形单元的位移函数如下:
所选用的这个位移函数,将单元内部任一点的位移定为座标的线性函数,位移模式很简单。
位移函数写成矩阵形式为:
{}?????
?????????????????=m m j j i i e
v u v u v u δ{}?????
??????
???????????=m m j j i i e
V U V U V U F {}[]{}
e
e e K F δ=结点位移
内部各点位移
应变应力结点力
(1)
单元分析
(4)
(3)(2)?
?
?
++=++=y a x a a y a x a a u 654321v ??????21a a
将水平位移分量和结点坐写成矩阵: 代入位移函数第一式:
令 则有 A 为三角形单元
[T]的伴随矩阵为 令 则有
同样,将垂直位移分量与结点坐标代入位移插值公式:
最终确定六个待定系数 :
m
m m j j j i i i y a x a a u y a x a a u y a x a a u 321321321++=++=++=??
???
?????????????
??=??????????321111a a a y x
y x y x u u u m m j j i i
m j i []T 111=????
?
?????m m
j j i i y x y x
y x []??
???
???
??=??????????-m j i u u u a a a 1321T A
2T =[]T
*T ????
?
????
?---------=i j j
i i j j i m i i m m
i i m j m m j j
m m j x x y y y x y x x x y y y x y x x x y y y x y x ????
?????
?=??
????????=m j
i m j
i m j i m m
m
j j
j
i i i
c c c b b b a a a c b a c b a c b a T
*]T [??
??
??????????????
?
?=???
???????m j i m j
i
m j i
m j
i
u u u c c c b b b a a a A a a a 21321??
??
?????????????
?
??=?????
?????m j i m j
i
m j i m j
i v v v c c c b b b a a a A a a a 21654??
??
???????????????
?=?????
?????m j i m j
i
m j i
m j
i u u u c c c b b b a a a A a a a 21321??
??
?????????????
?
??=?????
?????m j i m j
i
m j i m j i v v v c c c b b b a a a A a a a 21654])()()[(21
m m m m j j j j i i i i u y c x b a u y c x b a u y c x b a A
u ++++++++=
])()()[(21
m m m m j j j j i i i i v y c x b a v y c x b a v y c x b a A
v ++++++++=
??i u
令 (下标i ,j ,m 轮换)
[N]称为形态矩阵, N i 称为位移的形态函数
1.1.3 位移函数的收敛性
选择单元位移函数时,应当保证有限元法解答的收敛性,即当网格逐渐加密
时,有限元法的解答应当收敛于问题的正确解答。因此,选用的位移模式应当满足下列两方面的条件:
(1) 必须能反映单元的刚体位移和常量应变。 6个参数 到 反映了三个刚体位移和三个常量应变。 (2) 必须保证相邻单元在公共边界处的位移连续性。 (线性函数的特性)
1.1.4 应变矩阵和应力矩阵
利用几何方程、物理方程,实现用结点位移表示单元的应变和单元的应力。 用结点位移表示单元的应变的表达式为:
[B]矩阵称为几何矩阵
由物理方程,可以得到单元的应力表达式: 为应力矩阵
1.1.5 单元刚度矩阵
)(21
y c x b a A
N i i i i ++={}???
???????
????????????=?????
?????=m m j j i i m j i e
v u v u v u δδδδ1a
6a
{}????
????
??????????????
??????=???
?????????????+??????=εm m j j i i m m
j
j
i
i
m j i m j i v u v u v u b c b c b c c 0c 0c 0
0b 0b 0b A 21x v y u y v x u e
B }]{[}{δε=[][]
m
j i
B B B B =[]????
?
?????=i i i i i b c c b A B 0
021{}[]{}[][]{}e
B D D δεσ==[][][]
B D S =[][]
m
j i
S S S S =[][][]??
??
?
?
?
???????---==i i i i i i
i i b c c b c b A E B D S 212
1)1(22μμ
μμμ
讨论单元内部的应力与单元的结点力的关系,导出用结点位移表示结点
力的表达式。由应力推算结点力,需要利用平衡方程。用虚功方程表示出平衡方程。
考虑上图三角形单元的实际受力,任意虚设位移,节点位移结点力和内部应力为: 与内部应变为:
微小矩形的内力虚功为
根据虚功原理,得
这就是弹性平面问题的虚功方程,实质是外力与应力之间的平衡方程。
虚应变可以由结点虚位移求出: 代入虚功方程
接上式,将应力用结点位移表示出
有
令
则
{}
{}{}
{} dxdydz σ
εF δT *T *???=*{}
??
???
?????g εε=ε*xy *y *x *m
*m m *m j *j j *j i *i i *i V v U u V v U u V v U u +++++=T [
]
????
????
?
?????????=m m j j i i *m *
m *j *j *i *
i V U V U V U v u v u v u {}{}e eT
*
F δ
=dy)
(γtdx)(τdy)(εtdx)(σdx)(εtdy)(σdU *
xy xy *y y *x x ?+?+?=)tdxdy
τγσεσ(εxy *
xy y *y x *x ++=[]
tdxdy τσσ γεεxy y x *
xy *y *x ?????
?????={}{}{}{}??σε=
δtdxdy
F T
*e
T e *{}[]{
}{}T T
e
*T e *T *[B]δ)δB (ε=={}{}{}{}??=tdxdy B F T
T e
e
T e
σδδ][**{}{}??=tdxdy σ
[B]F T
e
{}[][]{}e δB D σ={}{}??=e
T e δ
y [D][B]tdxd [B]F []??=y [D][B]tdxd [B]K T e {}[]{}e e e δ
K F =
建立了单元的结点力与结点位移之间的关系, 称为单元刚度矩阵。它是6*6矩阵,其元素表示该单元的各结点沿坐标方向发生单位位移时引起的结点力,它决定于该单元的形状、大小、方位和弹性常数,而与单元的位置无关,即不随单元或坐标轴的平行移动而改变。
1.2 总刚度矩阵组装
整体刚度矩阵 是单元刚度矩阵 的集成。 1、刚度集成法的物理概念:
刚度矩阵中的元素是刚度系数,即由单位结点位移引起的结点力。 2、刚度矩阵的集成规则: 先对每个单元求出单元刚度矩阵 ,然后将其中的每个子块 送到结构刚度矩阵中的对应位置上去,进行迭加之后即得出结构刚度矩阵[K]的子块,从而得出结构刚度矩阵[K]。
关键是如何找出 中的子块在[K]中的对应位置。这需要了解单元中的
结点编码与结构中的结点编码之间的对应关系。
结构中的结点编码称为结点的总码,各个单元的三个结点又按逆时针方向编为i,j,m,称为结点的局部码。
单元刚度矩阵中的子块是按结点的局部码排列的,而结构刚度矩阵中的子块是按结点的总码排列的。因此,在单元刚度矩阵中,把结点的局部码换成总码,并把其中的子块按照总码次序重新排列。
以单元②为例,局部码i,j,m 对应于总码5,2,4,因此 中的子块按照总码重新
排列后,得出扩大矩阵
为上图所示: 用同样的方法可得出其他单元的扩大矩阵 将各单元的扩大矩阵迭加,即得出结构刚度矩阵[K]:
集成规则包含搬家和迭加两个环节:
1、将单元刚度矩阵 中的子块搬家,得出单元的扩大刚度矩阵 。
2、将各单元的扩大刚度矩阵 迭加,得出结构刚度矩阵[K]。
[]
K []e
k []
e
k []
ij k []
e
k
[](2)k [](2)
K [][][](4)(3)(1)K 、K 、
K [][][][][][]∑=+++=(e)(4)(3)(2)(1)K K K K K K []e
k []e K []e
K
1.3 引入约束条件修正总刚度矩阵
整体刚度矩阵[K]求出后,结构的结点力{F}可表示为:
在无支杆的结点处,结点力就等于已知的结点载荷。在有支杆的结点处,则求结点力时,还应把未知的支杆反力考虑在内。如果用{P}表示结点载荷和支杆反力组成的向量,则结点的平衡方程为
根据支承条件对平衡方程加以处理。先考虑结点n 有水平支杆的情况。与结点n 水平方向对应的平衡方程是第2n-1个方程,
根据支承情况,上式应换成
,即在[K]中,第2n-1行的对角线元素 应改为1,该行全部非对角线元素应改为0。在{P}中,第2n-1个元素应改为0。 此外,为了保持矩阵[K]的对称性,则第2n-1列全部非对角线元素也改为0。
同理,如果结点n 有竖向支杆,则平衡方程的第2n 个方程应改为 ,为此,在矩阵[K]中,第2n 行的对角线元素改为1,该行全部非对角线元素改为0,同时,第2n 列全部非对角线元素也改为0。在{P}中,第2n 个元素改为0。
1.4 载荷移置
将载荷移置到结点上,必须遵循静力等效的原则。静力等效是指原载荷与结点载荷在任意虚位移上做的虚功相等。在一定的位移模式下,移置结果是唯一
{}{}δ[K]F ={}{}P δ
=[K]xn
n 1,2n 2n n 11,2n 2n 11,22n 11,12n P ...v K u K ...v K u K =+++++-----0u n =1
1,2n 2n K --xn
P 0v n =??
?
??????
?
?
??
?
??
???
???????????????????=????????????????????????????????????????????????????????????????????????????00P P P P v u v u v u 00000000000010000000000001000000000000000000y 2x2y 1x1
n n 2211
的,且总能符合静力等效原则。
单元的虚位移可以用结点的虚位移 表示为 令结点载荷为
集中力的移置
如图所示,在单元内任意一点作用集中力 由虚功相等可得
由于虚位移是任意的,则 体力的移置
令单元所受的均匀分布体力为
由虚功相等可得: 2、四边形、四节点四面体、八节点六面体单元分析 2.1 四边形单元分析
四边单元可取矩形作为研究对象,矩形单元也是一种常用的单元,它采用了比常应变三角形单元次数更高的位移模式,因而可以更好地反映弹性体中的位移状态和应力状态。
矩形单元1234如图所示,其边长分别为2a 和2b ,两边分别平行于x 、y 轴。若取该矩形的四个角点为节点,因每个节点位移有两个分量,所以矩形单元共有8个自由度。采用三角形单元中的方法,同样可以完成对这种单元的力学特性分析。然而,如果我们引入一个局部坐标系ξ、η,那么就可以推出比较简洁的
结果。
在局部坐标系中,节点i 的坐标是(ξi , ηi ),其值分别为±1。取位移模式:
用与三角形单元相似的方法建立形函数,则位移模式可写成:
式中: {}
e
*δ{}{}
e
N f **][δ={}??????????
?
?????
??????=m m j j i i e Y X Y X Y X R ???++=tdxdy
p N tds P N P N R T s
T T c e }{][}{][}{][}{{}?
?
?
???=y x P P P ()()}
{][}{}{}{**P N R T
T
e e
T
e δδ=}
{][}{P N R T e =?
?????=
y x p }{()()??=tdxdy
p N R T
T
e
T
e }{][}{}{}{*
*δδ??=tdxdy
p N R T e }{][}{ u 2 (U ) u 3 (U )
v 3 (V 3) v 2 (V 2)
v 1 (V 1)
v 4 (V 4) u 1 (U 1)
u 4 (U 4) x
y
o ξ
η
1
2
4
3 2a
2b
ξηαηαξααξηαηαξαα87654321+++=+++=v u [][][]{})4321( , 01
, ,,,=??
??=????==i u I I N N i i i
i
δ{}[]{}
∑=?
??
???=i i N v u f δ
由几何方程可以求得单元的应变
可推出:
式中
由虎克定律我们可以得出用节点位移表示的单元应力,即
式中: 对于平面应力问题 有: 若将单元刚度矩阵写成分块形式:
则其中的子矩阵可按下式进行计算:
四边形单元的节点位移与单元节点力之间的关系仍为 : 其中载荷列阵{R }e 与上节中的(c)式相同,仍可按上式计算等效节点力。但是,需要注意的是,矩形单元有四个节点(1,2,3,4),所以{R }e 具有8个元素,即: 2.2 四节点四面体单元分析
2.2.1 单元划分及位移模式 如图1所示的四面体单元,单元结点的编码为i, j, m, n 。每个结点的位移具有三个分量u , v , w 。这样单元结点的位移列阵可表示成:
{}[]
δδδδδe
i j m n i
i
i i
i
i i
i
i i
i
i T
u v w u v w u v w u v w =????????????
??=
{}?????
?
??
????
??????+=????
??????????????+=??????????????????+=??????????=?ξ??η??η??ξ??ξ??η??η??ξ?????????g εεεv b u a v a u
b ab v a u b v b u a x v y u y v x u xy y x 11111{}[]{}
e
B B B B δε43
21
=[]()()()()???????
???++++=???
???
?
?
?
?????????=0000111001410
01ηξξηξηηξ?ξ??η
??η??ξ?i i i i i i i i i b a a b ab N b N a N a N b ab
B {
}[]{}[]{}
e
S S S S D δεσ43
21==[][][]
i i B D S =[]()
()()()()()()??????
?
???????+-+-++++-=00000
02121121111114ηξμξημξηηξμξημηξμi i i i i i i b a a b a b ab E
S []?????
??
?????=4443
42
4134333231242322
21141312
11k k k k k k k k k k k k k k k k k [][][][]??=tdxdy
B D B k j
T
i
ij
[]{}{}
e e R k =δ{}[]T e V U V U V U V U R 44332211=
单元的位移模式采用线性多项式:
u x y z v x y z w x y z =+++=+++=+++αααααααααααα123456789101112
式中,为待定系数,由单元结点的位移和坐标决定。将四个结点的坐标(x i , y i , z i )、(x j , y j , z j )、(x m , y m , z m )、(x n , y n , z n )和结点位移(u i , v i , w i )、(u j , v j , w j )、(u m , v m , w m )、(u n , v n , w n )代入(2)式可得12个联立方程,解方程组便可求出。将这十二个系数回代到式,则得到由结点位移和形函数表示的单元内任一点的位移表达式:
u N u N u N u N u v N v N v N v N v w N w N w N w N w i i j j m m n n i i j j m m n n i i j j m m n n
=+++=+++=+++
式中
()()
()()N V a b x c y d z N V a b x c y d z
N V a b x c y d z N V a b x c y d z i i i i i j j j j j m m
m m m n n n n n =
+++=-+++=+++=-+++1
61
61
61
6 N i ,N j ,N m ,N n 为四面体单元的形函数
位移模式可以用矩阵形式表示:
{}
[
]
{}
[]{}
f u v w N N N N N N N N N N N N N I N I
N I
N I N i j m n i j m n i
j
m
n i j m n i j m n e
e
=??????????=????????????????????????==0000000000000000
000
δδδδδδ
式中,[I ]为三阶单位阵,[N ]为形函数矩阵。上式即为单元结点位移和单元任意点位移之间的关系。 2.2.2 单元应变和应力
知道单元内任意一点位移后,可利用几何方程确定单元内该点的应变。将位移矩阵式代入空间问题几何方程得:
{}[]{}[
]
{}
εδδ==--B B B B B e i
j m
n e
其中
上式表明几何矩阵[B ]中的元素都是常量,因此单元中的应变也是常量。也就是说,采用线性位移模式的四面体单元是常应变单元。
将上式代入物理方程,就得到单元的应力列阵:
式中:[S ]为四面体单元的应力矩阵,其分块形式为:
[][][]S D B A V
b A
c A
d A b c A d A b A c d A c A b A d A c A d A b i
i
i
i i i i i i i i i i i i i
i
==
6000
3111111222222
其中
()
()()A A A E 12311221136112=
-=
--=
-+-μ
μμμμμμ()
2.2.3 单元刚度矩阵 对于四面体单元,利用虚功原理,采用类似平面问题的处理方法可以得到其单刚矩阵。
{}[][][]{}
[]{}
R B D B dxdydz K e T
e
e
e
=
=???δδ
其中:[K ]e 为单元刚度矩阵
[][][][][][][]K B D B dxdydz B D B V
e T T ==??
写成分块形式为:
[]
K k k k k k
k k k k k k k k k k k e
ii ij im in ji
jj jm jn mi mj mm mn ni
nj
nm
nn =--------??????
??
?
??
?
式中子矩阵[ K rs ]由下式计算:
[][]
[][]k B D B V
A V b b A c c d d A b c A c b A b b A d d A c b A b c c c A d d b b A c d A d c A d b A b d A d c A c d d d rs
r
T
s r s r s r s r s r s r s r s
r s r s
r s r s r s r s r s
r s r s
r s r s
r s ==+++++++++++321212122121212()
()A b b c c r s r s 2()+????????
?
? 可以看出, 单元刚度矩阵是由单元结点的坐标和单元材料的弹性常数所决
定的,是一个常数矩阵。
{ } [ ] { } [ ] [ ] { } [ ] { } [
]
{ }
σ ε δ δ δ = = = = - - D D B S S S S S e e
i
j m n e
2.3 八节点六面体单元分析 2.
3.1 形函数与坐标变换 形函数
坐标变换
2.3.2 位移插值函数与几何矩阵
简记为 : 2.3.3 单元刚度矩阵与等效节点载荷向量
单元刚度矩阵可以表示为:
将上式中的 替换为 则有:
写成高斯积分形式为:
()()()t t s s r r N i i i i +?+?+=
1118
1
()()()???
?
?
?????=?=?=∑∑∑===81818
1
,,,,,,i i i i i
i i i
i z t s r N z y t s r N y x t s r N x ()()()????
??
??
?
???????????????????
?=??????????e e e e N N N N N N N N N x y x w x y x v x y x u 243218882221
11
000000
000000
00000
,,,,,,δδδδM Λ
ΛΛ{}[]{
}e N u δ?=[][][]????
??????????????????????
?????????????????=??=8882221
1
10
00000
00000
000000
000
0000
N N N N N N N N N
x z
y z
x y z y
x N B Λ
ΛΛ
????????????
????
??[][][][][][][]dxdydz
B D B dv B D B K T
v T
v e
e
e ??=??=??????z
y x ,,t
s r ,,[][][][]drdsdt
J B D B K T
e
??=???---111111{}[]{}k
j i k
j
i
k
j
i
b
t
n
i n
j k
j
i
n
k e
b
h
h h t s r J t s r F t s r N P ?=∑∑∑===),,(),,(),,(111
3、其他常用单元形函数、自由度
3.1 轴对称单元
轴对称结构体可以看成由任意一个纵向剖面绕着纵轴旋转一周而形成。此旋转轴即为对称轴,纵向剖面称为子午面,如图表示一圆柱体的子午面abcd 被分割为若干个三角形单元,再经过绕对称轴旋转,圆柱体被离散成若干个三棱圆环单元,各单元之间用圆环形的铰链相连接。对于轴对称问题,采用圆柱坐标较为方便。以弹性体的对称轴为z 轴,其约束及外载荷也都对称于z 轴,因此弹性体内各点的各项应力分量、应变分量和位移分量都与环向坐标θ无关,只是径向坐标r 和轴向坐标z 的函数。也就是说,在任何一个过z 轴的子午面上的位移、应变和应力的分布规律都相同。因此轴对称问题可把三维问题简化为以(z ,r )为自变量的二维问题。
z
j
θa
b
r
i i
j m m d
c
由于轴对称性,弹性体内各点只可能存在径向位移u 和轴向位移w 。此时,位
移u 、w 只是r 、z 的函数,而环向位移v =0。即:
轴对称问题的物理方程可写为:
由于轴对称性,我们只需分析任意一个子午面上的位移、应力和应变情况。其有限元分析计算步骤和平面问题相似。首先进行结构区域的有限元剖分。采用的单元是三角形、矩形或任意四边形环绕对称轴z 旋转一周而得到的整圆环,通常采用的单元是三角形截面的整圆环。在单元类型确定之后,单元剖分可以在子午面内进行,如图5-1表示的abcde 子午面被分割为若干个三角形,绕对称轴z 旋转后即形成若干个三棱圆环单元。
相邻的单元由圆环形的铰链相连接。单元的棱边都是圆,故称为结圆。每个结圆与rz 平面的交点称为结点。
),(),(===v z r w w z r u u {}[][]{}εg εεεt σσσσθθD D rz z r rz z r =???
???????????=??????????????=
这样,各单元在子午面rz 平面上形成三角形网格,就如同平面问题中在xy 平面上的网格一样。采用位移法有限元分析,其基本未知量为结点位移。单元的结点位移列阵如下:
对于每一个环形单元,需要假定其位移模式。仿照平面三角形单元,取线
性位移模式:
类似于平面三角形单元的推导,即将单元的结点坐标及结点位移 代入式中,可以解出六个待定系数。再将这些待定系数回代到式中,就可以得到由结点位移和形函数所表示的单元内任一点的位移表达式:
其中形函数:
形函数矩阵的表达式为:
有上面分析可知,轴对称单元自由度有六个。
以上就是关于课程总结的全部内容。通过这八周的学习,我已经对有限元的基础有了一个大致掌握,关于用有限元进行具体分析也掌握了一些最基本的方法。其中应用到很多矩阵变换之中的知识,我会加强这方面知识的巩固。在以后的研究方向重,我也会对有限元分析的方法勤加练习。这门课对我以后的课题方向和分析方法有着举足轻重的作用。感谢雷老师严谨认真的教学,把理论课学习与上机练习紧密结合起来,是我们更加容易掌握要点,更加容易记住方法。在此表示衷心的感谢。
{}[][
]
T
m
m j j i i T
T m T j T i e w u w u w u ==δδδδz
r z r w w z
r z r u u 654321),(),(αααααα++==++==m
m j j i i m m j j i i w N w N w N w u N u N u N u ++=++=()()
m j i z c r b a N i i i i ,,2?
++=
[]??
??
??=m j
i
m j i
N N N N N N N 0
000
有限元变分原理
1有限元变分原理 有限元是求解偏微分方程的数值方法,在数学上属于变分法范畴,是古典的 Ritz-Galerkin方法与分片多项式插值的结合。古典的Ritz-Galerkin方法的试函 数是求解域内的连续函数,有限元法的试函数是分片多项式。作为变分法的试函 数产生了很大区别:古典的Ritz-Galerkin方法的试函数要求域内的连续或平方 可积且满足位移边界条件,试函数定义在泛函分析的Hilbert空间,或称为内积 空间。有限元法的试函数要求在单元域内连续或平方可积,且不用考虑位移边界 条件,因为有限元是以节点位移参数为未知数,可以直接代入位移边界条件,但 是单元间出现了连续性条件,即所谓的平面和三维弹性问题的C0连续,和薄板 问题的C1连续等,相对古典的Ritz-Galerkin方法的试函数是一种广义函数。有 限元试函数定义在泛函分析的Sobolev空间,或称为广义导数空间。 2 分片检验 2.1分片检验 长期以来在有限元收敛理论中的分片检验成为关注的焦点,同时也是一个疑难症。分片检验所以倍受关注,是因为它不仅可以用于检验单元的收敛性还可以用于构造收敛单元,而且十分方便。分片检验的研究大致经历了如下三个里程。第一,1965年Irons提出了不协调元的分片检验条件(Patch Test) [1,2],这是一个通过数值计算检验单元的收敛性的方法,可以通过对一小片有限元问题的数值计算检验单元的收敛性,也是有限元法中最实用的检验单元收敛性的方法,但是,作为一种数值检验的方法,在数学和力学原理上的提法都不够严密,而有限元的单元收敛性又是不能回避的问题。鉴于这个方法的有效性和实用性,人们一直对其开展系列的理论研究工作。1972年Strang首先给出分片检验的数学描述[3],后来,这个条件被解释成对一个单元的约束条件,称之为单体条件[4],这个条件使用很方便,可以做为单体的约束条件构造单元函数,但是,对这个分片检验一直缺少严格的数学证明。第二,1980年Stummel 基于严格的数学理论,建立了不协调元收敛的充分必要条件-广义分片检验[5],并且,通过举反例证明Irons的分片检验即不充分也不必要[6]。这个严格的理论是整体条件,而非单体条件,应用很困难,只限于用于少量单元的检验,而且需要有相当的泛函分析基础,对于大多数单元无法得到应用,更是无法用于指导构造不协调元,因此深入研究实用的不协调元收敛性条件是十分必要的。 此间,还推出了一些实用的充分条件,例如,F-E-M检验[7] 和IPT 检验[8]等,1995年建立了C0类非协调元收敛准则—强分片检验(SPT) [9],1997年基于加权Sobolev 空间理论,建立了轴对称非协调元收敛准则—强分片检验(ASPT) [10]。但是,数学的严格理论(例如,广义分片检验)难以在力学中应用,实用的力学准则(例如,分
有限元分析及应用大课后复习
有限元分析及应用作业报告
目录 有限元分析及应用作业报告....................................... I 目录 ........................................................ II 试题1 . (1) 一、问题描述 (1) 二、几何建模与分析 (2) 三、第1问的有限元建模及计算结果 (2) 四、第2问的有限元建模及计算结果 (7) 五、第3问的有限元建模及计算结果 (13) 六、总结和建议 (16) 试题5 (17) 一、问题的描述 (17) 二、几何建模与分析 (18) 三、有限元建模及计算结果分析 (18) 四、总结和建议 (26) 试题6 (27) 一、问题的描述 (27) 二、几何建模与分析 (27) 三、有限元建模及计算结果分析 (27) 五、总结和建议 (35)
试题1 一、问题描述 图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较: 1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算; 2)分别采用不同数量的三节点常应变单元计算; 3)当选常应变三角单元时,分别采用不同划分方案计算。 图1-1模型示意图及划分方案
二、几何建模与分析 图1-2力学模型 由于大坝长度>>横截面尺寸,且横截面沿长度方向保持不变,因此可将大坝看作无限长的实体模型,满足平面应变问题的几何条件;对截面进行受力分析,作用于大坝上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力,满足平面应变问题的载荷条件。因此该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况及方向如图1-2所示,建立几何模型,进行求解。 假设大坝的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3 三、第1问的有限元建模 本题将分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算。1)设置计算类型:两者因几何条件和载荷条件均满足平面应变问题,故均取Preferences为Structural 2)选择单元类型:三节点常应变单元选择的类型是PLANE42(Quad 4node42),该单元属于是四节点单元类型,在网格划分时可以对节点数目控制使其蜕化为三节点单元;六节点三角形单元选择的类型是PLANE183(Quad 8node183),该单元属于是八节点单元类型,在网格划分时可以对节点数目控制使其蜕化为六节点单元。因研究的问题为平面应变问题,故对Element behavior(K3)设置为plane strain。 3)定义材料参数:按以上假设大坝材料为钢,设定:ANSYS Main Menu: Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic →input EX:2.1e11, PRXY:0.3 → OK 4)生成几何模型: a. 生成特征点:ANSYS Main Menu: Preprocessor →Modeling →Create →Keypoints→In Active CS→依次输入三个点的坐标:
有限元法基本原理与应用
有限元法基本原理与应用 班级机械2081 姓名方志平 指导老师钟相强 摘要:有限元法的基础是变分原理和加权余量法,其基本求解思想是把计算域划分为有限个互不重叠的单元,在每个单元内,选择一些合适的节点作为求解函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。采用不同的权函数和插值函数形式,便构成不同的有限元方法。 关键词:有限元法;变分原理;加权余量法;函数。 Abstract:Finite element method is based on the variational principle and the weighted residual method, the basic idea is to solve the computational domain is divided into a finite number of non-overlapping units, each unit, select some appropriate function for solving the interpolation node points as , the differential variables rewritten or its derivative by the variable value of the selected node interpolation functions consisting of linear expressions, by means of variational principle or weighted residual method, the discrete differential equations to solve. Different forms of weight functions and interpolation functions, it constitutes a different finite element method. Keywords:Finite element method; variational principle; weighted residual method; function。 引言 有限元方法最早应用于结构力学,后来随着计算机的发展慢慢用于流体力学的数值模拟。在有限元方法中,把计算域离散剖分为有限个互不重叠且相互连接的单元,在每个单元内选择基函数,用单元基函数的线形组合来逼近单元中的真解,整个计算域上总体的基函数可以看为由每个单元基函数组成的,则整个计算域内的解可以看作是由所有单元上的近似解构成。在河道数值模拟中,常见的有限元计算方法是由变分法和加权余量法发展而来的里兹法和伽辽金法、最小二乘法等。根据所采用的权函数和插值函数的不同,有限元方法也分为多种计算格式。从权函数的选择来说,有配置法、矩量法、最小二乘法和伽辽金法,从计算单元网格的形状来划分,有三角形网格、四边形网格和多边形网格,从插值函数的精度来划分,又分为线性插值函数和高次插值函数等。不同的组合同样构成不同的有限元计算格式。对于权函数,伽辽金(Galerkin)法是将权函数取为逼近函数中的基函数;最小二乘法是令权函数等于余量本身,而内积的极小值则为对代求系数的平方误差最小;在配置法中,先在计
土木工程专业(081001)
土木工程专业(081001) 表一 一、培养目标: 培养适应国家、行业和地方经济社会发展需要的,德智体美劳全面发展,具有良好的职业道德、责任感、团队精神和沟通能力,掌握土木工程领域基础理论和专业知识,具有较强的实践能力、创新能力和创业精神,具有一定的国际视野,毕业5年左右能够成长为土木工程及相关领域的技术和管理骨干的高素质应用型人才。 本专业的毕业生在毕业五年后应能达到如下目标: (1)具有扎实和宽广的基础理论和专业知识,以及与土木工程领域相关的安全、法律、环境、经济管理等方面的知识,可对土木工程复杂问题提供系统的解决方案。 (2)具有较强的工程实践能力,并能够胜任土木工程及相关领域的项目规划、设计、施工、咨询、运维和技术管理等工作。 (3)具有良好的人文社会科学素养、社会责任感和团队协作精神,并能够遵守工程伦理和职业规范。 (4)熟悉土木工程领域的国内外研究现状,并能够与国内外同行进行沟通和交流。 (5)具备良好的自主学习、终身学习的能力,富有创新意识并具有一定的创新能力。 二、毕业要求: 本专业毕业生应获得以下几方面的知识、能力和素质: 1.工程知识:能够将数学、自然科学、工程基础和专业知识用于解决土木工程专业复杂工程问题。 2.问题分析:能够应用数学、自然科学和工程科学的基本原理,识别、表达、并通过文献研究分析土木工程专业复杂工程问题,以获得有效结论。 3.设计/开发解决方案:能够设计针对土木工程有关的复杂工程问题的解决方案,具备实施项目全寿命周期管理的能力,能够对实际工程进行合理的选址、选线,能理解结构设计意图并进行简单的结构方案设计,能够设计满足土木工程特定需求的体系、结构和构件,并能够在结构和施工方案设计环节中体现创新意识,综合考虑和评价社会、健康、安全、法律、文化、环境和可持续发展等因素。 4.研究:能够通过文献检索,凝练、研究、分析和表达土木工程专业的复杂工程问题,以获得有效结论,能够制定土木工程技术基础实验方案、独立完成实验并进行数据的整理、统计、分析和解释。 5.使用现代工具:能够针对土木工程专业复杂工程问题,开发、选择与使用恰当的技术、资源、现代工程工具和信息技术工具,包括对复杂工程问题的简化、预测与模拟,并能够理解其局限性。 6. 工程与社会:熟悉国家和地方涉及行业的政策和法律法规,能够基于工程相关背景知识进行合理分析,评价复杂工程问题的解决方案对社会、健康、安全、法律以及文化的影响,并理解应承担的责任。 7. 环境和可持续发展:能够理解和评价针对复杂工程问题的工程实践对然环境可持续发展的影
[科普]有限元历史与现代工程结构分析
[科普]有限元历史与现代工程结构分析 有限元方法的思想最早可以追溯到古人的“化整为零”、“化圆为直”的作法,如“曹冲称象”的典故,我国古代数学家刘徽采用割圆法来对圆周长进行计算;这些实际上都体现了离散逼近的思想,即采用大量的简单小物体来“冲填”出复杂的大物体。 曹冲称象 有限元法的物理实质是:把一个连续体近似地用有限个在节点处相连接的单元组成的组合体来代替,从而把连续体的分析转化为单元分析加上对这些单元组合的分析问题。 早在1870年,英国科学家瑞利Rayleigh 就采用假想的“试函数”来求解复杂的微分方程。 英国科学家瑞利Rayleigh(1842-1919) 1909年,里兹Ritz(1878-1909)将其发展成为完善的数值近似方法,为现代有限元方法打下坚实基础。 1943年,Richard Courant已从数学上明确提出过有限元的思想,发表了第一篇使用三角形区域的多项式函数来求解扭转问题的论文,由于当时计算机尚未出现,并没有引起应有的注意。但后来,人们认识到了Courant 工作的重大意义,并将1943年作为有限元法的诞生之年。
Richard Courant(1888-1972), 首次提出有限元的思想。 20世纪40年代,由于航空事业的飞速发展,设计师需要对飞机结构进行精确的设计和计算,便逐渐在工程中产生了的矩阵力学分析方法。 1955年,德国出版了第一本关于结构分析中的能量原理和矩阵方法的书,为后续的有限元研究奠定了重要的基础。 1956年,M. J. Turner (波音公司工程师),R. W. Clough(土木工程教授),H. C. Martin(航空工程教授)及L. J. Topp (波音公司工程师)等四位共同在航空科技期刊上发表一篇采用有限元技术计算飞机机翼强度的论文,名为《Stiffness and Deflection Analysis of Complex Structures》,系统研究了离散杆、梁、三角形的单元刚度表达式,文中把这种解法称为刚性法(Stiffness),一般认为这是工程学界上有限元法的开端。 1960年,美国克拉夫Ray W.Clough教授在美国土木工程学会(ASCE)之计算机会议上,发表了一篇处理平面弹性问题论文,名为《The Finite Element in Plane Stress Analysis》的论文,将应用范围扩展到飞机以外之土木工程上,同时有限元法(Finite Element Method,简称FEM)的名称也第一次被正式提出。
Abaqus-基础与应用-第一章概述
Abaqus-基础与应用-第一章概述
第1章概述 有限元分析是使用有限元方法来分析静态或动态的物体或系统。在这种方法中一个物体或系统被分解为由多个相互联结的、简单、独立的点所组成的几何模型。在这种方法中这些独立的点的数量是有限的,因此被称为有限元。 1.1有限元分析简介 本节首先简要介绍有限元分析的基本概念,然后简要阐述其发展和应用概况。 1.1.1有限元分析的基本概念 在工程技术领域内,有许多问题归结为场问题的分析和求解,如位移场、应力场、应变场、流场和温度场等。这些场问题虽然已经得出应遵循的基本规律(微分方程)和相应的限制条件(边界条件),但因实际问题的复杂性而无法用解析方法求出精确解。 由于这些场问题的解是工程中迫切所需要的,人们从不同角度去寻找满足工程实际要求的近似解,有限元方法就是随着计算机技术的发展和应用而出现的一种求解数理方程的非常有效的数值方法。 有限元分析的基本思想是用离散近似的概念,把连续的整体结构离散为有限多个单元,单元构成的网格就代表了整个连续介质或结构。这种离散化的网格即为真实结构的等效计算模型,与真实结构的区别主要在于单元与单元之间除了在分割线的交点(节点)上相互连接外,再无任何连接,且这种连接要满足变形协调条件,单元间的相互作用只通过节点传递。这种离散网格结构的节点和单元数目都是有限的,所以称为有限单元法。 在单元内,假设一个函数用来近似地表示所求场问题的分布规律。这种近似函数一般用所求场问题未知分布函数在单元各节点上的值及其插值函数表示。这样就将一个连续的有无限自由度的问题,变成了离散的有限自由度的问题。根据实际问题的约束条件,解出各个节点上的未知量后,就可以用假设的近似函数确定单元内各点场问题的分布规律。 有限元方法进行结构分析主要涉及三个问题: (1)网格剖分和近似函数的选取
混凝土桥梁徐变计算的有限元分析
收稿日期:2008208204 作者简介:赵品(1981)),女,硕士研究生,研究方向为大型结构健康诊断与控制 zh aop81@https://www.360docs.net/doc/5518310833.html, 混凝土桥梁徐变计算的有限元分析 赵 品, 王新敏 (石家庄铁道学院土木工程分院,河北石家庄050043) 摘 要:基于按龄期调整的有效模量法结合有限单元逐步分析法,对ANSYS 程序进行了计算混凝土桥梁徐变的二次开发。详细介绍了按龄期调整的有效模量法的具体计算步骤,并将计算结果与理论值进行比较,结果吻合的很好,且符合有砟轨道预应力混凝土箱梁的设计要求;验证了程序的正确性同时得出一些有益的结论:徐变对混凝土桥梁的影响不容忽视,必须予以重视。关键词:混凝土;桥梁;徐变 中图分类号:U441;U448.35 文献标识码:A 文章编号:167223953(2008)0620036204 一般混凝土的徐变变形大于其弹性变形,在不变的长期荷载下,混凝土结构的徐变变形值可达到瞬时变形值的1~6倍[1] 。对于静定结构,徐变会导致很大的变形,从而引起结构内部裂缝的形成和扩展,甚至使结构遭受破坏;对于超静定结构,徐变不但会引起变形,还会产生徐变次内力;在钢筋混凝土或预应力混凝土中,随时间变化的徐变,由于受到内部钢筋的约束会导致内力的重分配并引起预应力损失;分阶段施工的混凝土结构由于徐变的不同而导致内力的变化;连续梁、刚架、斜拉桥、拱桥等在施工过程中发生结构体系转换时,前期继承下来的应力状态所产生的应力增量受到后期结构的约束,而导致支座反力和结构内力变化:总之,徐变对混凝土结构的影响是非常大的。因此,对预应力混凝土桥梁在不同荷载工况下的徐变研究具有重要的现实意义。 1徐变计算所用的系数公式 按5铁路桥涵钢筋混凝土和预应力混凝土结构设 计规范6[2]中关于徐变系数的规定,其表达式如下:U (t,S )=B a (S )+0.4B d (t -S )+U f [B f (t)-B f (S )] (1) 为了便于计算机分析计算,对徐变系数进行拟合,得: U (t,S )=B a (S )+ E 4 i=1 C i (S )[1-e - q i (t-S ) ]+0.4B d (0) (2) 式中,B a (S )=0.8[1- 11.276(S 4.2+0.85S )3/2 ];C 1(S )=0.4A;C 2(S )=0.4B;C 3(S )=C #U f # e -q 3(S -3);C 4(S )=D #U f #e -q 4(S -3);B d (0)=0.27;A =0.43;B =0.30;q 1=0.0036;q 2=0.046。具体参数取值见表1。 表1 徐变系数计算中的参数取值理论厚度h /mm C D q 3q 4@10-3 U f 2<500.500.390.033 1.5 2.01000.470.420.0335 1.3 1.702000.410.480.034 1.1 1.554000.330.540.0350.85 1.406000.290.600.0380.65 1.33>1600 0.20 0.69 0.05 0.53 1.12 理论厚度h =K 2A h L ,K =1.5,A h 为构件截面面 积,L 为构件与大气接触的周边长度及箱梁内的长度。 2 逐步计算的方法[3] 2.1 结构单元和计算时间的划分 (1)时段划分。将计算时间从施工开始到竣工 后徐变完成,划分为若干阶段。对于一次现浇的简支梁桥而言,通常划分为浇筑混凝土、初张拉、终张拉、施加二期恒载四个阶段,根据每个施工状态,将计算时间划分成几个时间小段,也就是按施工工况进行划分。把施工阶段、加载时刻,作为各阶段与时间间隔的分界点,由初瞬时t =t 1起,以后各计算时刻依次为t 2,,t i ,,t n +1,相应时段则为:v t 1=t 2-t 1,,,v t i =t i+1-t i ,,,v t n =t n +1-t n 。 研究Research and De sign 与设计
有限元分析软件及应用
3.5 ANSYS软件加载、求解、后处理技术 3.5.1 ANSYS 3.5.1 ANSYS 荷载概述荷载概述 在这一节中将讨论: 有限元分析软件及应用 8 有限元分析软件及应用 8 A. 载荷分类 3.5 ANSYS 软件加载、求解、后处理技术 3.5 ANSYS 软件加载、求解、后处理技术 B. 加载 C. 节点坐标系 D. 校验载荷 孙瑛 孙瑛 E. 删除载荷 哈哈尔尔滨滨工工业业大学空大学空间结间结构研构研究中心究中心 2010秋 2010秋 SSRC SSRC 1/ 76 S Space pace S Stru truc ctu ture re R Res esear earc ch h C Center enter, H , HI IT, T, CH CHIN INA A
理技术 A. 载荷分类 B. 加载 A. 载荷分类 B. 加载 ANSYS中的载荷可分为: 可在实体模型或 FEA 模型节点和单元上加载自由度DOF - 定义节点的自由度( DOF )值结构分析_ 沿单元边界均布的压力 沿线均布的压力 位移集中载荷 - 点载荷结构分析_力面载荷 - 作用在表面的分布载荷结构分析_压力 在关键点处 在节点处约 约束体积载荷 - 作用在体积或场域内热分析_ 体积膨胀、内生 束 成热、电磁分析_ magnetic current density等实体模型 FEA 模型惯性载荷 - 结构质量或惯性引起的载荷重力、角速度等 在关键点加集中力在节点加集中力 SSR SSRC C SSR SSRC C 2/ 76 3/ 76 S Space pace S Stru truc ctu ture re R Res esear earc ch h C Center enter, H , HI IT, T, CH CHIN INA A S Space pace S Stru truc ctu ture re R Res esear earc ch h C Center enter, H , HI IT, T, CH CHIN INA A
有限元分析及应用大作业
有限元分析及应用大作业 作业要求: 1)个人按上机指南步骤至少选择习题中3个习题独立完成,并将计算结果上交; 也可根据自己科研工作给出计算实例。 2)以小组为单位完成有限元分析计算; 3)以小组为单位编写计算分析报告; 4)计算分析报告应包括以下部分: A、问题描述及数学建模; B、有限元建模(单元选择、结点布置及规模、网格划分方案、载荷及边界 条件处理、求解控制) C、计算结果及结果分析(位移分析、应力分析、正确性分析评判) D、多方案计算比较(结点规模增减对精度的影响分析、单元改变对精度的 影响分析、不同网格划分方案对结果的影响分析等) 题一:图示无限长刚性地基上的三角形大坝,受齐顶的水压力作用,试用三节点常应变单元和六节点三角形单元对坝体进行有限元分析,并对以下几种计算方案进行比较: 1)分别采用相同单元数目的三节点常应变单元和六节点三角形单元计算;(注意ANSYS中用四边形单元退化为三节点三角形单元) 2)分别采用不同数量的三节点常应变单元计算; 3)当选常应变三角单元时,分别采用不同划分方案计算。 解:1.建模: 由于大坝长度>>横截面尺寸,且横截面沿长度方向保持不变,因此可将大坝看作无限长的实体模型,满足平面应变问题的几何条件;对截面进行受力分析,作
用于大坝上的载荷平行于横截面且沿纵向方向均匀分布,两端面不受力,满足平面应变问题的载荷条件。因此该问题属于平面应变问题,大坝所受的载荷为面载荷,分布情况P=98000-9800*Y;建立几何模型,进行求解;假设大坝的材料为钢,则其材料参数:弹性模量E=2.1e11,泊松比σ=0.3; 2:有限元建模过程: 2.1 进入ANSYS : 程序→ANSYS APDL 15.0 2.2设置计算类型: ANSYS Main Menu: Preferences →select Structural →OK 2.3选择单元类型: ANSYS Main Menu: Preprocessor →Element Type→Add/Edit/Delete →Add →select Solid Quad 4node 182(三节点常应变单元选择Solid Quad 4node 182,六节点三角形单元选择Solid Quad 8node 183)→OK (back to Element Types window) →Option →select K3: Plane Strain →OK→Close (the Element Type window) 2.4定义材料参数: ANSYS Main Menu: Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic →input EX:2.1e11, PRXY:0.3 →OK 2.5生成几何模型: 生成特征点: ANSYS Main Menu: Preprocessor →Modeling →Create →Keypoints→In Active CS →依次输入四个点的坐标:input:1(0,0),2(10,0),3(1,5),4(0.45,5) →OK 生成坝体截面: ANSYS Main Menu: Preprocessor →Modeling →Create →Areas →Arbitrary →Through KPS →依次连接四个特征点,1(0,0),2(6,0),3(0,10) →OK 2.6 网格划分: ANSYS Main Menu: Preprocessor →Meshing →Mesh Tool→(Size Controls) lines: Set →依次拾取两条直角边:OK→input NDIV: 15 →Apply→依次拾取斜边:OK →input NDIV: 20 →OK →(back to the mesh tool window)Mesh:Areas, Shape: tri, Mapped →Mesh →Pick All (in Picking Menu) →Close( the Mesh Tool window) 2.7 模型施加约束: 给底边施加x和y方向的约束: ANSYS Main Menu: Solution →Define Loads →Apply →Structural →Displacement →On lines →pick the lines →OK →select Lab2:UX, UY →OK 给竖直边施加y方向的分布载荷: ANSYS 命令菜单栏: Parameters →Functions →Define/Edit →1) 在下方的下拉列表框内选择x ,作为设置的变量;2) 在Result窗口中出现{X},写入所施加的载荷函数: 98000-9800*{Y};3) File>Save(文件扩展名:func) →返回:Parameters →Functions →Read from file:将需要的.func文件打开,参数名取meng,它表示随之将施加的载荷→OK →ANSYS Main Menu: Solution →Define Loads →Apply →Structural →Pressure →On Lines →拾取竖直边;OK →在下拉列表框中,选择:Existing table →OK →选择需要的载荷为meng参数名→OK 2.8 分析计算: ANSYS Main Menu: Solution →Solve →Current LS →OK(to close the solve Current Load
有限元分析及应用例子FEM14
第9章受内外压筒体的有限元建模与应力变形分析(Project 2) 计算分析模型如图9-1 所示, 习题文件名: cylinder。 X (a) σO=100N/mm2 σI =200N/mm2 γ =7.85g/cm3 μ =0.3 E =210000N/mm2 (b) 图9-1 计算分析模型 9.1进入ANSYS 程序→ANSYSED 6.1ed →Interactive →change the working directory into yours→input Initial jobname: cylinder→Run 9.2 设置计算类型 ANSYS Main Menu: Preferences…→select Structural →OK 9.3 选择单元类型 ANSYS Main Menu: Preprocessor → Element Type →Add/Edit/Delete… → Add… →select Solid Quad 4node 42 →Apply →select Solid Brick 8node 45 → OK → Close (the Element
Types window) 9.4定义材料参数 ANSYS Main Menu: Preprocessor →Material Props →Materials Models →Structural→Lineal →Elastic→Isotropic…→input EX:2.1e5, PRXY:0.3→ OK 关闭材料定义窗口 9.5构造筒体模型 ?生成模型截平面 ANSYS Main Menu: Preprocessor →Modeling→Create →Keypoints →In Active CS… →按次序输入横截平面的十个特征点和旋转对称轴上两点坐标(十个特征点:(300,0,0), (480,0,0), (480,100,0), (400,100,0), (400,700,0), (480,700,0), (480,800,0), (300,800,0), (300,650,0), (300,150,0),对称轴上两点:(0,0,0), (0,800,0))(每次输入完毕,用Apply结束,0可以不输入) →Cancel (back to Create window) →-Areas- Arbitrary → Through KPs →依次连接截面边线上的十个特征点(注意在选完第10点后结束,不要再选第1点)→ OK ?对平面进行网格划分 ANSYS Main Menu: Preprocessor →Meshing→Mesh Tool →(Size Controls) Globl: Set →input SIZE (element edge length): 50 →OK (back to MeshTool window)→Mesh → Pick All (in Picking Menu) → Close( the MeshTool window) ?用旋转法生成筒体模型 ANSYS Main Menu: Preprocessor →Modeling→Operate →Extrude→Elem Ext Opts→select TYPE:SOLID 45→Element sizing options for extrusion No. Elem divs: 1→OK (back to Extrude window)→Areas →About Axis →Pick All(in Picking Menu)→OK→Pick the two keypoints (11,12) of the Symmetrical Axis → OK→input ARC: 90; NSEG: 3→ OK 9.6 模型加位移约束 ANSYS Main Menu: Solution→Define Loads →Apply→Structural→Displacement ?两截面分别加Z, X方向的约束 ANSYS Utility Menu: Select → Entities…→Nodes → By Location →select X coordinates →input 0→ OK (back to Displacement window)→On Nodes → Pick All(in Picking Menu) → select Lab2:UX →OK →ANSYS Utility Menu: Select → Everything ANSYS Utility Menu: Select → Entities…→ Nodes → By Location →select Z coordinates →input 0→ OK (back to Displacement window)→On Nodes →Pick All(in Picking Menu) → select Lab2:UZ →OK →ANSYS Utility Menu: Select →Everything ?底面加Y方向的约束 ANSYS Utility Menu: Select → Entities… → Nodes → By Location →select Y coordinates →input 0→ OK (back to Displacement window)→On Nodes →Pick All(in Picking Menu) →
土木工程研究生有限元结题大作业
郑州大学土木工程学院2014 级研究生“有限元分析”课程大作业 说明:①每人试卷应有一个封面,注明姓名、学号、年级、专业和研究方向; ②从以下题目中选择一个题目,把所选试题附在扉页; ③本部分大作业重点是写出建模、分析过程,起到研究和锻炼作用,不强调结果。即使所得答案有一定问题也不影响本作业的质量,重点是考察对所选择题目的研究分析过程。 ④对于采用已有有限元软件计算,应附出其有限元结点、单元、材料参数以及边界条件和计算控制过程的文本文件(如ABAQUS的*inp文件),同时详细描述建模过程和边界条件的施加过程。 1.编写弹性力学平面4 结点四边形单元的单元刚度矩阵形成的程序。 要求: (1)可采用C、FORTRAN 或VB等程序语言; (2)材料参数采用props[2]存储,分别为弹性模量和泊松比;单元4 个结点的x 和y 坐标数组 为coordsx[4]和coordsy[4](不同语言数组表示方式不同); (3)在一个程序中,给出单元的结点坐标、材料参数,然后传给该单元刚度矩阵形成程序, 进行计算; (4)给出一个简单的结果显示或输出程序,将计算得到的单元刚度矩阵计算结果显示出来; (5)需要提交:程序清单,程序结构关系说明和程序主要变量说明,算法描述,计算结果的 屏幕硬拷贝打印,程序窗口的屏幕硬拷贝打印。 2. 编写弹性力学平面3结点三角形单元的有限元程序,可由1-3人组成一个小组共同编写。 要求: (1)可采用C、FORTRAN 或VB等程序语言; (2)阐述程序的结构,并给出程序调用框图; (3)阐述数据结构之间的相互关系,对所用主要变量进行简单说明; (4)给出一个简单算例,并计算出结果。 (5)以排名次序表明所参加人员(不超过3人)的贡献。 3. 针对混凝土的一个本构模型(非线性、弹塑性等),设计一个算法,并编制程序(C,c++,FORTRAN,VB等)计算其应力增量。 (1)材料参数采用数组props()存储,分别对应如泊松比、弹性模量、…..。 (2)已知当前的应力为stress(),累计的总应变为strain(),给定一个小的应变增量dstrain(), 计算应力增量dstress()。 (3)如需要采用中间变量累计存储一些参量,如累计塑性应变等,采用一个数组存储。
一般有限元原理
一般有限元原理 一、基本理论 有限元单元法是数值计算方法中发展较早、应用最广的一种方法。利用有限元法,可以解决经典的传统的方法难以解决或无法求解的许多实际问题。其优点是部分地考虑边坡岩土体的非均质、不连续的介质特征,考虑岩土体的应力应变特征,可以避免将坡体视为刚体,过于简化边界条件的缺点,能够接近实际从应力应变的角度分析边坡的变形破坏机制。对了解边坡的应力分布及应变位移变化很有利。 有限单元法实质是变分法的一种特殊的有效形式,其基本思想是:把连续体离散化为一系列的连接单元,每个单元内可以任意指定各种不同的力学形态,从而可以在一定程度上更好地模拟地质体的实际情况,特殊的节理元,可以有效地模拟岩土体中的结构面。 在大多数情况下岩土体材料应采用非线形模型,其中包括岩体弹塑性、蠕变、不抗拉特性以及结构面性质的影响。下面简要叙述有限元法的求解过程和原理。 有限单元法的基本原理 1.有限单元法的实施步骤 有限元的重要步骤归纳起来,主要有以下几步: (1)建立离散化的计算模型,包括以一定型式的单元进行离散化,按照求解问题的具体条件确定荷载及边界条件; (2)建立单元的刚度矩阵; (3)由单元刚度矩阵组集总体刚度矩阵,并建立系统的整体方程组; (4)引入边界条件,解方程组,求得节点位移; (5)求各单元的应变、应力及主应力。 2位移模式与单元类型 在一般的有限单元法问题中,我们常以位移作为未知数,称为位移法。为保证解的收敛性,要求位移模式必须满足以下三条: (1)位移模式必须能包含单元的刚体位移。即当节点位移是由某个刚体位移所引起时,弹性体内不会有应变。 (2)位移模式必须能包含单元的常应变,即与位置坐标无关的那部分应变。
《有限元分析及应用》配书盘说明
《有限元分析及应用》配书盘 曾攀 (清华大学机械工程系) 说明 该配书盘针对《有限元分析及应用》一书中有关有限元分析的自主程序开发、与ANSYS平台的衔接、基于ANSYS的有限元建模、基于MARC的有限元建模的章节,提供相应的电子材料及文档,以便在进行实际编程和应用国际著名商业软件进行建模和分析时参考。电子文档材料包括三大部分:(1)有限元分析源程序(f,c,ANSYS衔接);(2) 四类问题有限元分析的操作指南(ANSYS,MARC);(3) ANSYS一般性帮助文件。具体的文件目录和清单如下。 在目录/有限元分析源程序(f,c,ANSYS衔接)/中有以下内容 (1) 使用说明文件 自主程序开发使用说明(fortran,C,ANSYS平台衔接).pdf (2 ) 在子目录/fortran源程序及与ANSYS衔接(FEM2D)/中有以下文件 源程序文件: FEM2D.FOR 程序需读入的数据文件: BASIC.IN(模型的基本信息文件,需手工生成) NODE_ANSYS.IN (节点信息文件,可由ANSYS前处理导出,或手工生成) ELEMENT_ANSYS.IN(单元信息文件,可由ANSYS前处理导出,或手工生成)程序输出的数据文件: DATA.OUT (一般结果文件) FOR_POST.DAT(专供ANSYS进行后处理的结果数据文件) 与ANSYS后处理衔接的接口程序: USER_POST.LOG(在ANSYS中进行后处理的命令流文件) (3 ) 在子目录/c源程序及与ANSYS衔接(JIEKOU)/中有以下文件 源程序文件: JIEKOU.CPP 程序需读入的数据文件: NODE_ANSYS.IN(从ANSYS前处理导出的节点信息文件) ELEMENT_ANSYS.IN(从ANSYS前处理导出的单元信息文件) INPUT.DAT(包含除网格划分信息之外的所有前处理信息) 程序输出的数据文件:
有限元分析的典型应用领域
有限元分析的典型应用领域 6-4:对该问题进行有限元分析的过程如下。 (1)进入ANSYS(设定工作目录和工作文件) 程序→ANSYS→ANSYS Interactive →Working directory(设置工作目录)→Initial jobname(设置工作文件名):Press →Run →OK (2)设置分析特性 ANSYSMain Menu:Preferences…→Structural →OK (3)定义单元类型 ANSYSMain Menu:Preprocessor →Element Type →Add/Edit/Delete... →Add…→Solid: Quad 4node 42 →OK(返回到Element Types窗口)→Options…→K3:Plane Strs w/thk(带厚度的平面应力问题)→OK →Close (4)定义材料参数 ANSYSMain Menu:Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic:EX:2.1e11(弹性模量),PRXY:0.3(泊松比)→OK →点击该窗口右上角的“×”来关闭该窗口 (5)定义实常数以确定平面问题的厚度 ANSYSMain Menu:Preprocessor →Real Constants…→Add/Edit/Delete →Add →Type 1 PLANE42 →OK →Real Constant Set No:1(第1号实常数),THK:3.4(平面问题的厚度)→OK →Close (6)生成几何模型 生成上拱形梁 ANSYSMain Menu:Preprocessor →Modeling →Create →Keypoints→In Active CS →NPT Keypoint number:1,X,Y,Z Location in active CS:-4.5,8.5→Apply →同样输入后5个特征点坐标(坐标分别为(-2.25,8.5),(2.25,8.5),(4.5,8.5),(0,13),(0,10.75))→OK →Lines →Lines →Straight Line 用鼠标分别连接特征点1,2和3,4生成直线→OK→Arcs →By End KPs & Rad →用鼠标点击特征点2,3 →OK →用鼠标点击特征点6 →OK →RAD Radius of the arc:2.25→Apply (出现Warning对话框,点Close关闭)→用鼠标点击特征点1,4 →OK →用鼠标点击特征点5 →OK →RAD Radius of the arc:4.5→OK(出现Warning对话框,点Close关闭)→Areas →Arbitrary →By Lines →用鼠标点击刚生成的线→OK 生成下拱形梁 ANSYSMain Menu:Preprocessor →Modeling →Create →Keypoints→In Active CS →NPT Keypoint number:7,X,Y,Z Location in active CS:-4.5,-8.5→Apply →同样输入后5个特征点坐标(坐标分别为(-2.25,-8.5),(2.25,-8.5),(4.5,-8.5),(0,-13),(0,-10.75)→OK →Lines→Lines →Straight Line →用鼠标分别连接特征点7,8和9,10生成直线→OK →Arcs →By End KPs & Rad →用鼠标点击特征点8,9 →OK用鼠标点击特征点12 →OK →RAD Radius of the arc:2.25→Apply (出现Warning对话框,点Close关闭)→用鼠标点击特征点7,10 →OK →用鼠标点击特征点11 →OK →RAD Radius of the arc:4.5→OK(出现Warning对话框,点Close关闭)→Areas →Arbitrary →By Lines →用鼠标点击刚生成的线→OK 生成两根立柱 ANSYSMain Menu:Preprocessor →Modeling →Create →Areas →Rectangle →By 2 Corners →WP X:-4.5,WP Y:-8.5,Width:2.25,Height:17→Apply →WP X:2.25,WP Y:-8.5,Width:2.25,Height:17→OK 粘结所有面