自动控制原理习题87264

《自动控制原理》习题
习题1
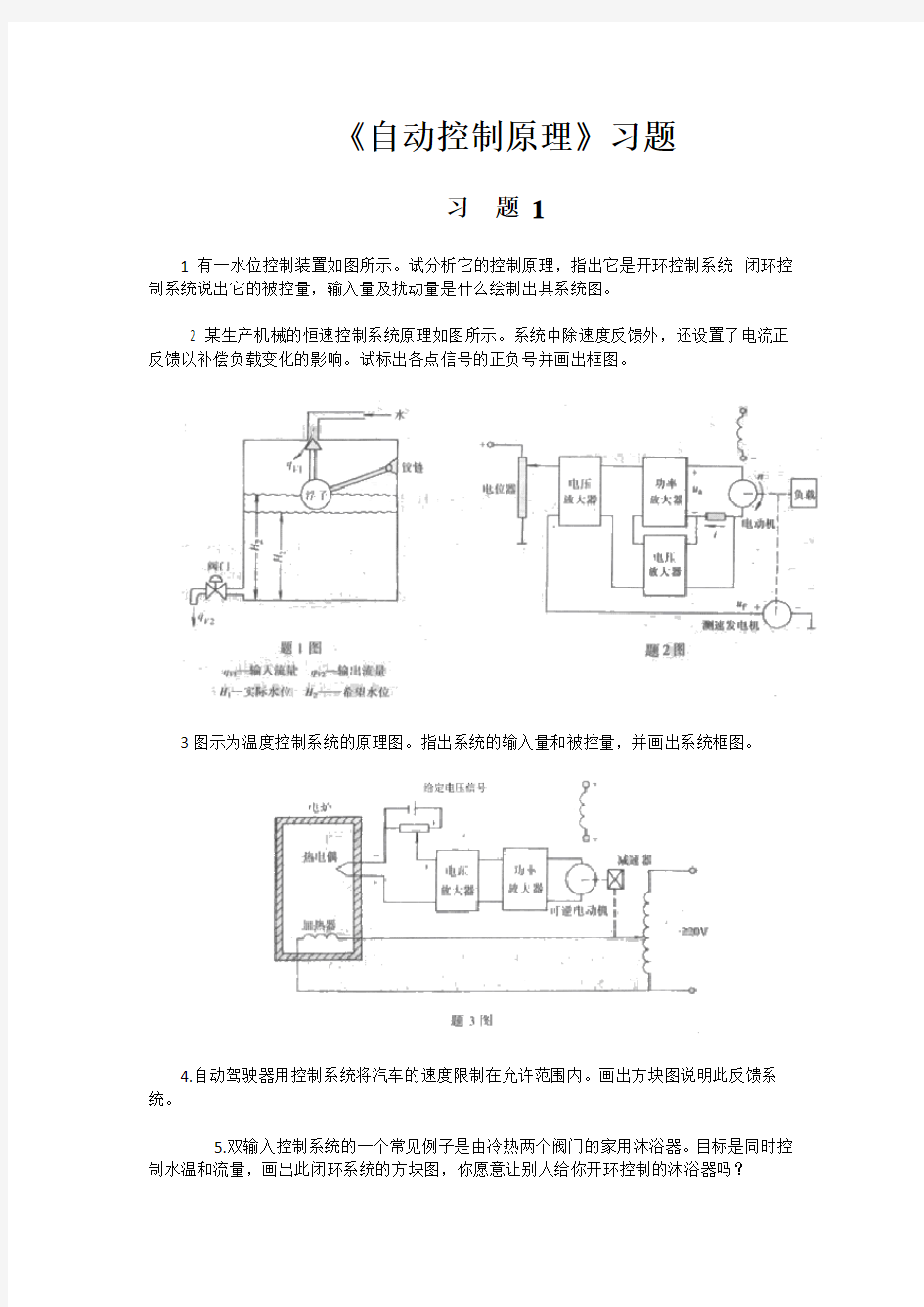
1有一水位控制装置如图所示。试分析它的控制原理,指出它是开环控制系统闭环控制系统说出它的被控量,输入量及扰动量是什么绘制出其系统图。
2 某生产机械的恒速控制系统原理如图所示。系统中除速度反馈外,还设置了电流正反馈以补偿负载变化的影响。试标出各点信号的正负号并画出框图。
3图示为温度控制系统的原理图。指出系统的输入量和被控量,并画出系统框图。
4.自动驾驶器用控制系统将汽车的速度限制在允许范围内。画出方块图说明此反馈系统。
5.双输入控制系统的一个常见例子是由冷热两个阀门的家用沐浴器。目标是同时控制水温和流量,画出此闭环系统的方块图,你愿意让别人给你开环控制的沐浴器吗?
6.开环控制系统和闭环控制系统各有什么优缺点?
7.反馈控制系统的动态特性有哪几种类型生产过程希望的动态过程特性是什么
习题2
1试分别写出图示各无源网络的传递函数。
@
习题1图
2求图示各机械运动系统的传递函数。
(1)求图a的=(2)求图b的=(3) 求图c的=
习题2图
3试分别写出图中各有源网络的传递函数U2(s)/ U1(s)。
习题3图
4交流伺服电动机的原理线路和转矩-转速特性曲线如图所示。图中,u为控制电压.T 为电动机的输出转矩。N为电动机的转矩。由图可T与n、u呈非线性。设在某平衡状态附近用增量化表示的转矩与转速、控制电压关系方程为
'
k n、k c为与平衡状态有关的值,可由转矩-转速特性曲线求得。设折合到电动机的总转动惯量为J,粘滞摩擦系数为f,略去其他负载力矩,试写出交流伺服电动机的方程式并求输入
为u c,输出为转角θ和转速为n时交流伺服电动机的传递函数。
习题4图
5图示一个转速控制系统,输入量是电压V,输出量是负载的转速,画出系统的结构图,并写出其输入输出间的数学表达式。
习题5图
6 已知一系统由如下方程组组成,试绘制系统框图,求出闭环传递函数。
7 系统的微分方程组如下:
;
其中K0,K1,K2,T均为正常数。试建立系统结构图,并求传递函数C(s)/R(s),C(s)/N1(s)及C(s)/N2(s)。
8 试简化图中各系统结构图,并求传递函数C(s)/R(s)。
习题8图
9 试用梅逊公式求解习题8图所示系统的传递函数C(s)/R(s)。
10 考虑习题10图所示的结构图,试求出C(s)/R(s)。
习题10图
11 已知系统结构图如习题11图所示,试写出系统在输入R(s)及扰动N(s)同时作用下输出C(s)的表达式。
\
习题11图
12 已知系统结构如习题12图所示,试将其转换成信号流图,并求出C(s)/R(s)。
习题12图
13 系统的信号流图如习题13图所示,试求C(s)/R(s)。
习题13图
14 习题14图是一个模拟调节器的电路示意图。
(a)写出输入u r与输出u c之间的微分方程;
$
(b)建立该调节器的结构图;
(c)求闭环传递函数U c(s)/U r(s)。
习题14图
15某弹簧的力-位移特性曲线如习题17图所示。在仅存在小扰动的情况下,当工作点分别为
x0 =、0、时,试计算弹簧在工作点附近的弹性系数。
习题15图
16试求习题16图所示结构图的传递函数C(s)/R(s)。
习题16图
,
17已知系统结构图如习题17图所示,求传递函数C1(s)/R1(s),C2(s)/R1(s),C1(s)/R2(s),C2(s)/R2(s)。
习题17图
18放大器可能存在死区,其工作特性曲线如习题18图所示。在近似线性工作区,可以用3次函数y = ax3来近似描述放大器的输入-输出特性。当工作点为x =时,试选择a的合适取值,并确定放大器的线性近似模型。
习题18图
习 题 3
1 一单位反馈系统的开环传递函数为
)
1(1
)(G +=
s s s K
求①系统的单位阶跃响应及动态性能指标σ%,t s ,t p ②输入量 为单位脉冲函数时系统的输出响应。
】
2 设控制系统闭环传递函数为
试在S 平面上绘出满足下述要求的系统特征方程式根可能位于的区域。 (a )1>≥,
n ≥2
(b )≥>0,4≥n ≥2
(c )≥
>,
n ≤2
3 一单位反馈系统的开环传递函数为
G k (s)=ωn 2 /s(s+2ξωn)
已知系统的r(t)=1(1),误差时间函数为
e(t)=
?
求系统的阻尼比ξ,自然振荡角耗率ωn、系统的闭环传递函数及系统的温态误差。4已知二阶系统的闭环传递函数为
确定在下述参数时的闭环极点,并求系统的单位阶跃响应曲线和相应的性能指标。(a)=2,n = 5;
(b),n = 5;
(c)当≥时,说明是否可忽略距离原点较远的极点及理由。
5单位反馈系统的开环传递函数为
(a)求系统在单位阶跃输入信号r(t) =1(t)作用下的误差函数e(t);
(b)是否可以用拉普拉斯变换的终值定理求系统的稳态误差,为什么
'
6单位反馈系统的开环传递函数为
(a)当K=1时,求系统在r(t)=1(t)作用下的稳态误差;
(b)当r(t) =1(t)时,为使稳态误差e ss= ,试确定K值。
7已知单位反馈系统闭环传递函数为
(a)在单位斜坡输入时,确定使稳态误差为零的参数b0、b1应满足的条件;
(b)在(a)求得的参数b0、b1下,求单位抛物线输入时,系统的稳态误差。
8系统结构图如习题8图所示。
(a)当r(t) = t,n(t) = t时,试求系统总稳态误差;
(b)当r(t) = 1(t),n(t) = 0时,试求p、t p。
%
习题8图
9 设单位反馈控制系统的开环传递函数为
试求当输入信号r(t)=1+2 t+t2时,系统的稳态误差。
10有闭环系统的特征方程式如下,试用劳斯判据判定系统的稳定性,并说明特征根在复平面上的分布。
S3+20s2+4s+50=0
S4+2s3+6s2+8s=0
S6+3s5+9s4+18s3+22s2+12s+12=0
11某控制系统如图3-47所示。其中控制器采用增益为K p的比例控制器,即G c(s)= K p,试确定使系统稳定的K p值范围。
!
习题11图
12某控制系统的开环传递函数为
试确定能使闭环系统稳定的参数K、T的取值范围。
13已知某系统的结构与参数如习题13图所示。
(a)当输入R(s)=1/s,N(s)=0时,试求系统的瞬态响应;
(b)当输入R(s)=0,N(s)= A/s时,试分析干扰变化对系统的影响。
习题13图
14已知某系统的结构图如习题14图所示,其中系统的时间常数为1=10秒和2=50秒,K=3。试求R(s)从1/s变化到2/s,且N(s)=1/s时系统的瞬态响应,并求系统此时的稳态误差e ss,其中E(s) = R(s)-C(s)。
&
习题14图
15已知系统结构图如习题15图所示。
(a)求K=3,r(t)= t时的稳态误差e ss ;
(b)如果欲使e ss≤,试问是否可以通过改变K值达到,为什么
习题15图
16系统的结构图如习题16图所示,其中e = r-c,K、T1、T2均大于零。
(a)当=1时系统是几型的
(b)如果r(t)为单位阶跃函数,试选择使系统的稳态误差为零。
…
习题16图
17系统结构图如习题17图所示,其中e = r-c,K1、T均大于零。
(a)当K2=0时系统是几型的
(b)如果r(t)为单位斜坡函数,试选择K2使系统的稳态误差为零。
习题17图
18设单位反馈系统的开环传递函数为
若要求闭环特征方程根的实部均小于-1,试问K应在什么范围取值如果要求实部均小于2,情况又如何
《
19某系统的闭环传递函数为
试分析零点-3和极点-8对系统瞬态性能(如超调量、调整时间等)的影响。
20某闭环系统的结构图如习题20图所示,其中分别0,,和。
(a)分别计算系统的单位阶跃响应,并画出相应的响应曲线。在此基础上,求出系统的超调量、上升时间和调整时间;
(b)讨论对系统响应的影响,并比较开环零点-1/与闭环极点的位置关系。
习题20图
21某闭环系统的结构图如习题21图所示,其中分别0,,2和5。
(a)分别计算系统的单位阶跃响应,并画出相应的响应曲线。在此基础上,求出系统的超调量、上升时间和调整时间;
(b)讨论对系统响应的影响,并比较开环极点-1/与闭环极点的位置关系。
(
习题21图
22某闭环系统的结构图如习题22图所示,其控制器的零点可变。
(a)分别计算a =0和a ≠0时系统对阶跃输入的稳态误差;
(b)画出a =0,10和100这3中情况下系统对阶跃干扰的响应曲线,并在比较的基础上,从a的3个取值中选择最佳值。
习题22图
23电枢控制直流电动机的结构图如习题23图所示。
(a)试计算系统对斜坡输入r(t)= t的稳态误差,其中K m=10, K b=, K为待定参数。如果要求稳态误差等于1,试确定K的取值;
(b)画出系统在0 习题23图 24试选择K1和K2的值,使图3-64所示系统阶跃响应的峰值时间为秒,超调量可以忽略不计(即%<超调量<%)。 】 习题24图 25控制系统的结构图如习题25图所示。 (a)确定该闭环系统的2阶近似模型; (b)应用2阶近似模型,选择增益K的取值,使系统对阶跃输入的超调量小于15%,稳态误差小于。 习题25图 26设单位反馈系统的开环传递函数分别为 ①G k(s)=K(s+1)/s(s-1)(s+5) ②G k(s)=K/s(s-1)(s+5) 试确定分别使闭环系统稳定的开环增益的取值范围。 习题4 1设开环系统的零、极点在s平面上的分布图如下图所示,试绘制相应的根轨迹草图。 ; 题1图 2已知系统的特征方程为 ⑴ ⑵ ⑶ 试绘制以为参数的根轨迹图。 3设单位反馈系统的开环传递函数 (1)试绘制系统根轨迹大致图形,并分析系统的稳定性。 } (2)若增加一个零点z=-1,试问根轨迹图有何变化,对系统稳定性有何影响。 4已知单位负反馈系统的开环传递函数 试用根轨迹法来确定使闭环主导极点的阻尼比ζ=和自然角频率ωn =2时的取值。 5设负反馈系统的开环传递函数为 ⑴作出系统准确的根轨迹; ⑵确定使系统临界稳定的开环增益; ⑶确定与系统临界阻尼比相应的开环增益。 6单位负反馈系统的开环传递函数为 ] 试绘制系统的根轨迹图,并确定产生纯虚根时的z值和值。 7设控制系统的开环传递函数如下,试画出参数b从零变到无穷时的根轨迹图。 ⑴ ⑵ 8设控制系统的开环传递函数为 试画出系统分别为正反馈和负反馈时的根轨迹图,并分析它们的稳定性。 9已知正反馈系统的开环传递函数为 试绘制系统的根轨迹图。 《 10非最小相位系统的特征方程为 试绘制该系统的根轨迹图。 11已知非最小相位负反馈系统的开环传递函数为 试绘制该系统的根轨迹图。 12反馈系统的开环传递函数为 试用根轨迹法确定系统无超调响应时的开环增益。 13设负反馈控制系统的开环传递函数为 ` 证明系统的根轨迹含有圆弧的分支。 14如习题14图所示控制系统 ⑴画出系统的根轨迹图; ⑵求系统输出c(t)无振荡分量时的闭环传递函数。 习题14图 15设负反馈系统的开环传递函数为 试绘制系统根轨迹的大致图形。若系统 ? ⑴增加一个z=-5的零点; ⑵增加一个z=的零点; ⑶增加一个z=的零点。 试绘制增加零点后系统的根轨迹,并分析增加开环零点后根轨迹的变化规律和对系统性能的影响。 16已知负反馈系统的传递函数为 ⑴利用Matlab有关函数作出0≤a<1时系统的根轨迹和单位阶跃响应曲线; ⑵讨论a值变化对系统动态性能及稳定性的影响(0≤a<1=; 17设单位反馈系统的开环传递函数 $ 若要求系统的增益为=90,试求a为何值才能满足闭环系统最大超调量%18%的要求 习题5 1若系统单位阶跃响应 y(t)= + t>=0 试求系统频率特性。 2已知单位反馈系统的开环传递函数如下,试绘制其开环频率特性的极坐标图。 (1) (2) (3) (4) & (5) (6) (7) (8) (9) (10) 3已知某系统的开环传递函数为