两级NGW型行星齿轮传动设计计算及优化
两级NGW型行星齿轮传动设计计算及优化
摘要:随着社会的不断向前发展和科技进步,齿轮的传动在各行各业都得到了较快的发展。齿轮传动尤其在园林工具行业得到了广泛的应用,比如外啮合齿轮传动、锥齿轮传动、斜齿轮传动和NGW型行星齿轮传动等。本方案主要讲述两级NGW型行星齿轮减速器的设计过程和优化。齿轮制造的精度要求也相对比较高,一般情况下,齿轮的精度不低于8-7-7级,高速转动的太阳轮和行星轮不低于5级,内齿轮的精度不低于6级。
关键词:两级NGW型行星齿轮;计算;不等角变位;变位系数;强度;精度等级;啮合角
前言
目前锂电式园林工具中的绿篱机,在市场经济条件下的激烈竞争下,制造成本的激烈竞争下,所设计和生产制造的产品必须向着轻量化,噪音小,体积小的方向发展。这就迫切需要研发设计出一套符合体积小,重量轻,噪音小的齿轮传动。所设计的齿轮减速器体积的大小,直接决定了绿篱机的体积,只有把绿篱机的主要腔体的体积设计的小,才有可能降低材料成本。一个体积比较大的绿篱机,其材料的成本必然会高,这是我们设计工作者不愿意看到的现象。而行星齿轮传动,具有效率高,体积小,重量轻,结构简单,制造方便,传动功率范围大,轴向尺寸小等特点。是设计者首要选择和设计的对象。本文仅仅围绕两级NGW 型行星齿轮减速器的设计计算过程和优化,进行展开分析。那么如何根据本公司的要求,设计出符合条件的行星齿轮减速器呢?详情如下:原理图
一、设计要求:
直流电机,电机功率500w,电机转速20800r/min左右,电机的输出轴φ5mm。设计需要的切割刀片的速度为1600spm左右。
二、设计和计算过程:
1.计算传动比i
输入转速n1=20800r/min,输出转速n2=1600spm
i= n1 /n2=20800/1600=13
2.分配传动比
为了减少制造成本,本案的两级NGW型行星齿轮减速器的所有齿轮,在强度等符合条件的情况下,采用粉末冶金件AE粉,而不是采用机加工的工艺进行,这样大大的减少了机加工带来的不必要的成本。两级NGW型行星齿轮减速器的强度考核,主要考核的是太阳轮和行星轮的强度。他们的转速高,强度大。粉末冶金并进行热处理,采用常规的工艺完成设计。
根据机械设计手册新版第3卷,齿轮齿面接触疲劳强度校核调节和要求进行如下参数选择:
行星传动比及啮合频率计算
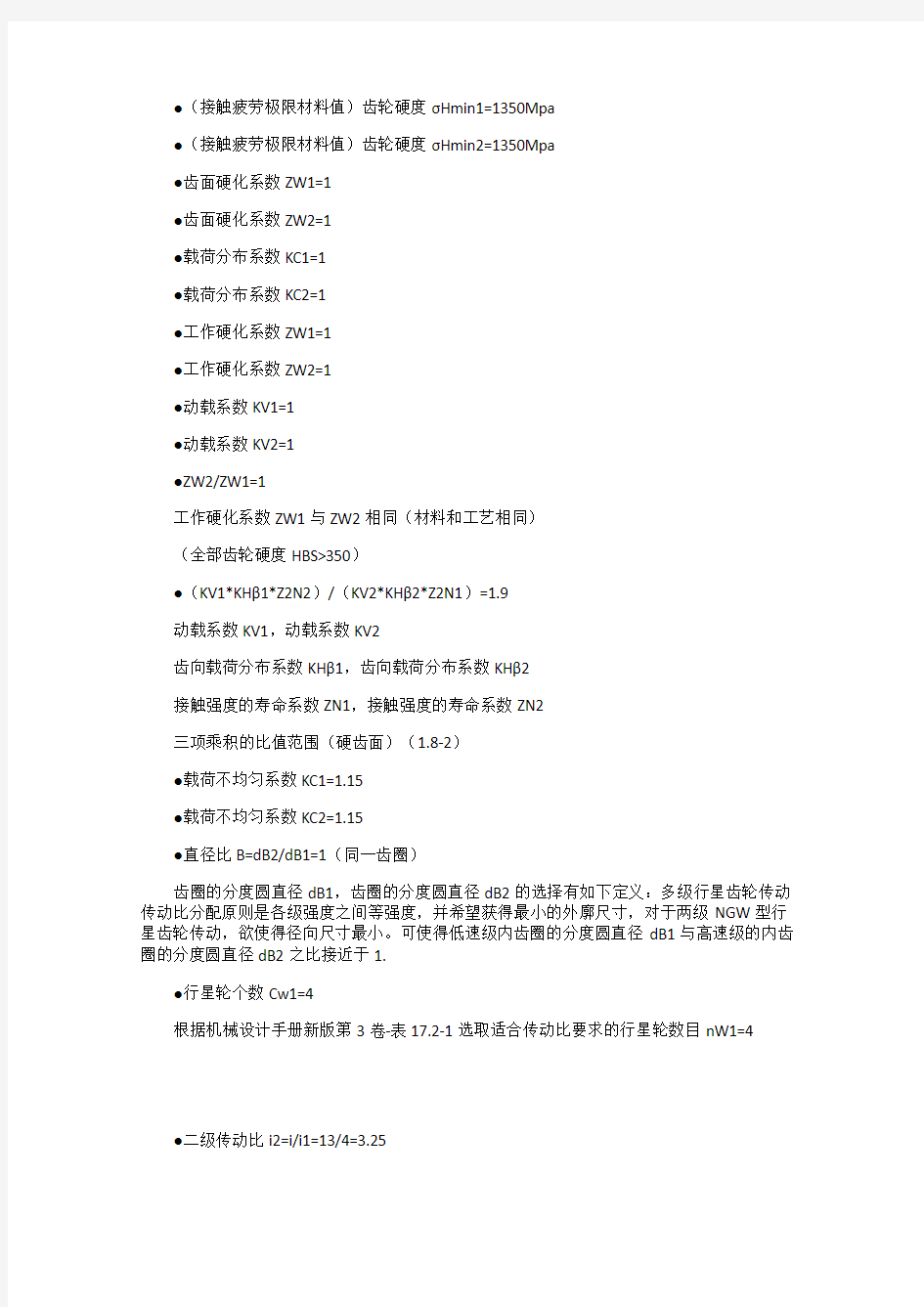
行星传动传动比及啮合频率计算 特征频率主要包含转频和啮合频率,根据传动比计算的结果,可以相应的算出每个齿轮相对应的转速n ,则转频60i i f n =,齿轮啮合频率等于该齿轮的转频乘以它的齿数。相互啮合的两个齿轮的啮合频率是相等的。即zi i i f f z =?。而齿轮的振动谱就是以该基频(zi f )波和高次谐波所组成的谱,因此在故障诊断中具有重大意义。又因为相互啮合的两个齿轮的啮合频率是相等的,所以一组行星轮系当中只要计算中心论转速即可。 1 a 1 b 1 c 2 a 2 b 2 c Input Shaft Output Shaft 2 d 1 d 3 d 4 d 齿轮模型 齿轮箱各级齿轮参数 参数 行星齿轮箱 平行轴齿轮箱 一级 二级 高速级 低速级 a 1 b 1 c 1 a 2 b 2 c 2 d 1 d 2 d 3 d 4 模数 1 1 1 1 1 1 1.5 1.5 1.5 1.5 齿数 20 40 100 28 36 100 29 100 90 36 个数 1 3 1 1 4 1 1 1 1 1
n –输入转速; Za1–第一级太阳轮齿数;Zb1 –第一级行星轮齿数;Zc1–第一级内齿圈齿数; Za2 –第二级太阳轮齿数;Zb2 –第二级行星轮齿数;Zc2 –第二级内齿圈齿数; (1) 一级行星轮系: 111111a H c c H a n n z n n z -=-- 其中,n n n a c ==11,0 ,则 )1//(11111+==a c a H b z z n n n =n 6 1 (2) 二级行星轮系: 222 222 a H c c H a n n z n n z -=--其中, 1 22,0H a c n n n ==,则 )1//(22222+==a c a H b z z n n n =232 7 a n 行星轮系级: 传动比i =192/7 (3)平行轴: 中间低速级: 传动比i1= 小 大 n n =100/29 高速级: 传动比i2= 小 大 n n =2.5 平行轴传动比:i=8.6 总传动比:i=232 齿轮箱振动特征频率 1. 啮合频率: 1)转速同步频率 n f = n/60 式中,n 为轴转速(转/分)。 2)定轴齿轮啮合频率 n f = nz/60 式中,n 为轴转速(转/分), r z 为齿轮齿数。 3)行星轮系,啮合频率用下式计算: m f = a b a c b z f f z f ?-=?)( 式中,b n 为行星轮架转速(转/分),c z 为内 齿圈齿数,a f 为太阳轮转频,a z 为太阳轮齿数。 m f =(15.95-1.975)*13=181.675 m f =1.975*92=181.7
齿轮传动强度计算例题01
同济大学《机械设计》 JXSJ 51 直齿圆柱齿轮传动例题: 如图设计带式输送机减速器的高速级齿轮传动。已知输入功率P 1=40KW ,小齿轮转速n 1=960r/min,齿数比u=3.2,由电动机驱动,工作寿命15年(每年 工作300天),两班制,带式运输机工作平稳,转向不变。 解: 1. 选择齿轮类型、材料、精度等级和齿数 1) 选用直齿轮。 2) 材料:考虑到功率较大,大小齿轮均用硬齿面. 3) 材料为40Cr ;调质后表面淬火,齿面硬度为48~55HRC. 4) 选取精度等级:初取7级精度 5) 齿数:Z1=24;Z2=uZ1=77 2. 按齿面接触疲劳强度设计 1)设计公式: 2)确定各参数值 (1) 初取K t =1.3 (2) 转矩 T 1=95.5×105P/n 1=95.5×105×40/960=3.98×105N·m (3) 选取齿宽系数. ψd =0.9 (4) 弹性影响系数. ZE=189.8Mpa1/2 (5) 许用应力 a) 接触疲劳强度极限 σHlim = σHlim1= σHlim2=1170Mpa b)应力循环次数: N 1=60n 1γL h =60?960?1?(2?8?300?15)=4.147?109 N 2=N 1/u=4.147?109/3.2=1.296?109 c)寿命系数:K N1=0.88 K N2=0.90 d)许用安全系数 [s]=1 e)许用应力: [σHlim1]= K N1σHlim1/s=0.88?1170/1=1030Mpa [σHlim2]= K N2σHlim1/s=0.9?1170/1=1053Mpa [σHlim ]= [σHlim1]=1030Mpa (6) 初算直径 3)修正计算 (1) 速度: v=πd 1n 1/60?1000=3.14?68.39?960/60?1000=3.44(m/s) (2) 齿宽 b=ψd d 1t =0.9?68.39=61.55mm (3) 计算齿宽与齿高之比 模数:m t =d 1t/Z 1=68.39/24=2.85 齿高:h=2.25m t =2.25?2.85=6.413 b/h=61.55/6.413=9.6 (4) 计算载荷系数 a)动载系数 K v =1.12 b)使用系数 K A =1 b) 齿间载荷分配系数 设K A F t /b ≥100N/mm 则:K H α=K F α=1.1 c) 齿向载荷分布系数:K H β=1.43,K F β=1.37 载荷系数: K H =K A K V K H β K F β=1?1.12?1.1?1.43=1.72 K F = K A K V K H β K F β=1?1.12?1.1?1.37=1.69 (5) 修正分度圆: (6) 计算模数m m=d 1/Z 1=75.08/24=3.128mm 2.按齿面弯曲疲劳强度设计 1) 计算公式 2) 确定公式内的各参数值 (1) K F =1.69;T 1=3.98?105;ψd =0.9;Z 1=24 (2) 许用应力 a) 极限应力: σF1=σF2=680Mpa b) 寿命系数: K FN1=0.88;K FN2=0.90 c) 安全系数:S=1.4 d) 许用应力: [σF1]=K FN1σF1/S=0.88?680/1.4=427.4Mpa [σF2]=K FN2σF2/S=0.90?680/1.4=437.14Mpa (3) 齿形系数:Y Fa1=2.65;Y Fa2=2.226 (4) 应力校正系数:Y Sa1=1.58;Y Sa2=1.764 (5) 计算Y Fa Y Sa/[σF ] Y Fa1Y Sa1/[σF1]=2.65?1.58/427.4=0.0098 Y Fa2Y Sa2/[σF2]=2.226?1.764/437.14=0.00898 Y Fa Y Sa /[σF ]=0.0098 3) 计算 3. 几何计算 1) 分度圆直径: d 1=75mm ;d 2=mZ 2=3?80=240 2) 模数:由接触疲劳强度和弯曲疲劳强度计算,取m=3mm 3) 齿数:Z 1=d 1/m=75/3=25 Z 2=uZ 1=3.2?25=80 4) 齿轮宽度:b=ψd d 1=0.9?75=67.5mm 取B 1=73mm ;B 2=68mm 5) 验算: F t =2T 1/d 1=2?3.98?105=10613.33N K A F t /b=1?10613.33/68=156.08N/mm>100N/mm 合适 4. 结构设计(略) 1 2 3 4 5 6 7 []3 2 1112 32.2??? ? ??±≥H E d Z u u KT d σψ[])(39.6810308.1892.312.39.0103983.12 32.212 32.2325 3 2 11mm Z u u T K d H E d t t =? ?? ??±???=??? ? ??±≥σψ) (08.753.1/72.139.683311mm K K d d t t =?==[] 32 11 2sa Fa F d Y Y z KT m σψ≥mm m 94.20098.0249.01098.369.1232 5 =?????≥
行星齿轮传动比计算
行星齿轮传动比计算 在《机械设计》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错, 其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比, 其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这 几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a cb a bc i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴 传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传 动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1 )1(11133 1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代 入公式得出1H i =10000 最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。
直齿锥齿轮传动计算例题
例题10-3试设计一减速器中的直齿锥齿轮传动。已知输入功率P=10kw,小齿轮转速n1=960r/min,齿数比u=3.2,由电动机驱动,工作寿命15年(设每年工作300天),两班制,带式输送机工作平稳,转向不变。 [解]1.选定齿轮类型、精度等级、材料及齿数 (1)选用标准直齿锥齿轮齿轮传动,压力角取为20°。 (2)齿轮精度和材料与例题10-1同。 (3)选小齿轮齿数z1=24,大齿轮齿数z2=uz1=3.224=76.8,取z2=77。 2.按齿面接触疲劳强度设计 (1)由式(10-29)试算小齿轮分度圆直径,即 1) =1.3 计算小齿轮传递的转矩。 9.948 选取齿宽系数=0.3。 查得区域系数 查得材料的弹性影响系数。 [] 由图 由式( , 由图10-23查取接触疲劳寿命系数 取失效概率为1%,安全系数S=1,由式(10-14)得 取和中的较小者作为该齿轮副的接触疲劳许用应力,即
2)试算小齿轮分度圆直径 (2) 1 3.630m/s ②当量齿轮的齿宽系数 0.342.832mm 2) ①由表查得使用系数 ②根据级精度(降低了一级精度) ④由表 由此,得到实际载荷系数 3)由式(10-12),可得按实际载荷系数算得的分度圆直径为 及相应的齿轮模数 3.按齿根弯曲疲劳强度设计 (1)由式(10-27)试算模数,即
1)确定公式中的各参数值。 ①试选 ②计算 由分锥角 由图 由图 由图查得小齿轮和大齿轮的齿根弯曲疲劳极限分别为 由图取弯曲疲劳寿命系数 ,由式(10-14)得 因为大齿轮的大于小齿轮,所以取 2)试算模数。 =1.840mm
普通锥齿轮差速器设计
第一章绪论 汽车行驶时,左、右车轮在同一时间内所滚过的路程往往不等。例如,转弯时内、外两侧车轮行程显然不同,即外侧车轮滚过的距离大于内侧车轮;汽车在不平路面上行驶时,由于路面波形不同也会造成两侧车轮滚过的路程不等;即使在平直路面上行驶,由于轮胎气压、轮胎符合、胎面磨损程度不同以及制造误差等因素的影响,也会引起左、右车轮因滚动半径不同而使左、右车轮行程不等。如果驱动桥的左、右、车轮刚性连接,则行驶时不可避免地会产生驱动轮在路面上滑移或滑转。这不仅会加剧轮胎磨损与功率和燃料的消耗,而且可能导致转向和操纵性能恶化。为了防止这些现象的发生,汽车左、右驱动轮间都装有轮间差速器,从而保证了驱动桥两侧车轮在行程不等时具有不同的旋转角速度,满足了汽车行驶运动学的要求;在多桥驱动汽车上还常装有轴间差速器,以提高通过性,同时避免在驱动桥间产生功率循环及由此引起的附加载荷,使传动系零件损坏、轮胎磨损和增加燃料消耗等。 差速器用来在两输出轴间分配转矩,并保证两输出轴有可能以不同的角速度转动。差速器按其结构特征不同,分为齿轮、凸轮式、蜗轮式和牙嵌自由轮式等多种形式。 本次设计选择的是对称锥齿轮式差速器中的普通锥齿轮式差速器。
第二章 普通锥齿轮差速器基本原理 普通锥齿轮差速器由于结构简单、工作平稳可靠,一直广泛用于一般使用条件下的汽车驱动桥中。图2-1为其示意图,图中ω0为差速器壳的角速度; ω1、ω2分别为左、右两半轴的角速 度;To 为差速器壳接受的转矩;T r 为 差速器的内摩擦力矩;T 1、T 2分别为左、右两半轴对差速器的 反转矩。 图2-1 普通锥齿轮式差速器示意图 根据运动分析可得 ω1+ω2=2ω0 (2 - 1) 显然,当一侧半轴不转时,另一侧半轴将以两倍的差速器壳体角速度旋转;当差速器壳体不转时,左右半轴将等速反向旋转。 根据力矩平衡可得 T0 T2T1T0T1-T2{ =+= (2 - 2) 差速器性能常以锁紧系数k 是来表征,定义为差速器的内摩擦力矩与差速器壳接受的转矩之比,由下式确定 K=r T /0T (2 - 3) 结合式(5—24)可得 k ) -0.5T0(1T1k ) 0.5T0(1T2{ =+= (2 - 4) 定义快慢转半轴的转矩比kb=T2/T1,则kb 与k 之间有
机械设计基础习题
《机械设计基础》习题 机械设计部分 目录 8 机械零件设计概论 9 联接 10 齿轮传动 11 蜗杆传动 12 带传动 13 链传动 14 轴 15滑动轴承 16 滚动轴承 17 联轴器、离合器及制动器 18 弹簧 19机械传动系统设计 8机械零件设计概论 思考题 8-1 机械零件设计的基本要求是什么? 8-2 什么叫失效?机械零件的主要失效形式有几种?各举一例说明。 8-3 什么是设计准则?设计准则的通式是什么? 8-4 复习材料及热处理问题。复习公差与配合问题。 8-5 什么是零件的工艺性问题?主要包含哪几方面的问题? 8-6 什么是变应力的循环特性?对称循环应力和脉动循环应力的循环特性为多少?8-7 什么是疲劳强度问题?如何确定疲劳极限和安全系数? 8-8 主要的摩擦状态有哪四种? 8-9 磨损过程分几个阶段?常见的磨损有哪几种? 8-10 常见的润滑油加入方法有哪种?
9 联 接 思 考 题 9-1 螺纹的主要参数有哪些?螺距与导程有何不同?螺纹升角与哪些参数有关? 9-2 为什么三角形螺纹多用于联接,而矩形螺纹、梯形螺纹和锯齿形螺纹多用于传动?为 什么多线螺纹主要用于传动? 9-3 螺纹副的自锁条件是什么?理由是什么? 9-4 试说明螺纹联接的主要类型和特点。 9-5 螺纹联接为什么要预紧?预紧力如何控制? 9-6 螺纹联接为什么要防松?常见的防松方法有哪些? 9-7 在紧螺栓联接强度计算中,为何要把螺栓所受的载荷增加30%? 9-8 试分析比较普通螺栓联接和铰制孔螺栓联接的特点、失效形式和设计准则。 9-9 简述受轴向工作载荷紧螺栓联接的预紧力和残余预紧力的区别,并说明螺栓工作时所 受的总拉力为什么不等于预紧力和工作载荷之和。 9-10 简述滑动螺旋传动的主要特点及其应用。 9-11 平键联接有哪些失效形式?普通平键的截面尺寸和长度如何确定? 9-12 为什么采用两个平键时,一般布置在沿周向相隔180°的位置,采用两个楔键时,相 隔90°~120°,而采用两个半圆键时,却布置在轴的同一母线上? 9-13 试比较平键和花键的相同点和不同点。 9-14 简述销联接、焊接、粘接、过盈联接、弹性环联接和成形联接的主要特点和应用场合。 习 题 9-1 试证明具有自锁性螺旋传动的效率恒小于50%。 9-2 试计算M24、M24×1.5螺纹的升角,并指出哪种螺纹的自锁性好。 9-3 图示为一升降机构,承受载荷F =150 kN ,采用梯形螺纹,d = 60 mm ,d 2 = 56 mm ,P = 8 mm ,线数n = 3。支撑面采用推力球轴承,升降台的上下移动处采用导向滚轮,它们的摩擦阻力近似为零。试计算: (1)工作台稳定上升时的效率(螺纹副当量摩擦系数为0.10)。 (2)稳定上升时加于螺杆上的力矩。 (3)若工作台以720 mm/min 的速度上升,试按稳定运转条件求螺杆所需转速和功率。 (4)欲使工作台在载荷F 作用下等速下降,是否需要制动装置?加于螺杆上的制动力矩是多少? 题9-3图 题9-4图 题9-5图 9-4 图示起重吊 钩最大起重 量F = 50 kN ,吊钩材 料为35钢。牵曳力F R F F 导向滚轮 齿轮 制动轮 推力球轴承
最新行星齿轮传动比计算资料
行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。 【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T的机构
1 2 3 4 差动轮系:2个运动 行星轮系:, 对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 13 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W AH H A H H A H AB i W W W W W i -=-=--= 110H AB AH i i -=1
行星齿轮传动比最简计算方法公式法
行星齿轮传动比计算 在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a cb a bc i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴 传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1 )1(11133 1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代 入公式得出1H i =10000 最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。 注: H ab i =±所有从动轮齿数的连乘积所有主动轮齿数的连乘积 ( 正负号不表示周转轮系中a 轮和b 轮的实际转向关系,而表示转化轮系中a 轮和b 轮的转向关系。转向相同取正,相反取负。 不能省略正负号,此处正负号关系着传动比的计算数值!)
圆弧齿锥齿轮传动设计几何计算过程
圆弧齿锥齿轮传动设计几何计算过程 圆弧齿锥齿轮传动设计 几何计算过程 输入参数: 齿轮类型:35。格里森制 大端模数m=6mm 齿形角a =20° 齿数 Z 1=30,Z 2=90 径向变位系数X 1 =.347,x 2=-.347 传动比i=3 齿顶高系数 h a*=.85 切向变位系数 x t1 =-.056,x t2=.O56 中点螺旋角3m =35° 齿顶间隙系数c *=.188 齿宽系数tpR =.211 ,宽度b=60mm 小轮螺旋方向:左旋 序号 项目 公式 结果 1 大端分度圆d d 1=Z 1m,d 2=Z 2m d 1=180.00mm, d 2=540.00mm 2 分锥角S 81 =arctan(Z 1/Z 2), 2=90- 8 81=18.435 ° ,2=71.565 ° 3 锥距R R=d 1/2sin 81=d 2/2sin 82 R=284.605mm 4 齿距p p= nm p=18.850mm 5 齿高h h=(2h a *+c*)m h=11.328mm 6 齿顶高h a h a =(h a *+x)m h a1=7.182,h a2=3.018mm 7 齿根高h f h f =(h a *+c*-x)m h f1 =4.146,h f2=8.310mm 8 顶隙c c=c*m c=1.13mm 9 齿根角9f Q f1=arctg(h f1/R), Q =arctg(h f2/R) 0f1 =.835 ° ,f2=1.672 ° 10 齿顶角Q a Q a 1= Q f2, Q 2=Q f1(等顶隙收缩齿) 0a1=1.672 ° 戶陆.835 ° 11 顶锥角8a 8a1= 81+ Q f2, 82= 82+Q f1 81=20.107 °, 82=72.400 ° 12 根锥角8 8f1= 81- Q f1, f2= 82- 02 8f1=17.600 °, 8(2=69.893 ° 13 顶圆直径d a d a1=d 1+2h a1COS 81,d a2=d 2+2h a2COS 82, d a1=193.63,d a2=541.91mm 14 分锥顶点至轮冠距离 A k A k1 =d 2/2-h a1Sin 81,=d 1/2-h a2Sin 82 A k1=267.73,A k2=87.14mm 15 齿宽中点分度圆直径 d m d m1=d 1-bsin 81,d m2=d 2-bsin 82 d m1=161.026mm,d m2=483.079mm 16 齿宽中点模数m m m m =d m1/z 1=d m2/z 2 m m =5.368mm 17 中点分度圆法向齿厚s mn S mn =(0.5 n COS 唱+2xtan a +x?m m s mn1 =7.962mm,s mn2=5.851mm 18 中点法向齿厚半角书mn , 2 ^mn =S mn Sin 8 COS 旳/d m ipmn1 =1.803 ° 书 mn 2=.147 19 中点分圆法向弦齿厚S mn 2 _S mn =S mn (1-书mn /6) S mn1 =7.960mm 丄 mn2=5.851mm 20 中点分圆法向弦齿高h am h am =h a -btan 0a /2+S mn ^mn /4 h am1 =6.369mm,h am2=2.585mm 21 当量齿数Z v 3 Z v =Z/cos 8 cos (3m Z v1=57.532,Z v2=517.784 22 端面重合度£a e?=[Z 1(tan a at1 -tan a )/cos 1 +Z 2(tan a at2-tan a )/cos 2]/2 n 其中:tan a =(tan a /cos m j &z =1.317
行星齿轮传动比计算(完整资料).doc
【最新整理,下载后即可编辑】 行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类
若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系:, H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==
对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1 =100,Z 2 =101,Z 2' =100, Z 3 =99。求:输入件H对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H行星架 给整个机构(-W H )绕OO轴转动 = B W AH H A H H A H AB i W W W W W i- = - = - - =1 1 H AB AH i i- =1 2 1 3 2 2 3 1 13 )1 ( ' ? ? ? - = - - = Z Z Z Z W W W W i H H H
直齿锥齿轮传动计算例题
例题10-3 试设计一减速器中的直齿锥齿轮传动。已知输入功率P=10kw,小齿轮转速n1=960r/min,齿数比u=3.2,由电动机驱动,工作寿命15年(设每年工作300天),两班制,带式输送机工作平稳,转向不变。 [解] 1.选定齿轮类型、精度等级、材料及齿数 (1)选用标准直齿锥齿轮齿轮传动,压力角取为20°。 (2)齿轮精度和材料与例题10-1同。 (3)选小齿轮齿数z1=24,大齿轮齿数z2=uz1=3.224=76.8,取z2=77。 2.按齿面接触疲劳强度设计 (1)由式(10-29)试算小齿轮分度圆直径,即 1)确定公式中的各参数值。 ①试选=1.3。 ②计算小齿轮传递的转矩。 9.948 ③选取齿宽系数=0.3。 ④由图10-20查得区域系数。 ⑤由表10-5查得材料的弹性影响系数。 ⑥计算接触疲劳许用应力[]。 由图10-25d查得小齿轮和大齿轮的接触疲劳极限分别为 ,。 由式(10-15)计算应力循环次数: , 由图10-23查取接触疲劳寿命系数,。 取失效概率为1%,安全系数S=1,由式(10-14)得 取和中的较小者作为该齿轮副的接触疲劳许用应力,即 2)试算小齿轮分度圆直径
(2)调整小齿轮分度圆直径 1)计算实际载荷系数前的数据准备。 ①圆周速度 3.630m/s ②当量齿轮的齿宽系数。 0.342.832mm 2)计算实际载荷系数。 ①由表10-2查得使用系数。 ②根据Vm=3.630m/s、8级精度(降低了一级精度),由图10-8查得动载系数Kv=1.173。 ③直齿锥齿轮精度较低,取齿间载荷分配系数。 ④由表10-4用插值法查得7级精度、小齿轮悬臂时,得齿向载荷分布系数 。 由此,得到实际载荷系数 3)由式(10-12),可得按实际载荷系数算得的分度圆直径为 及相应的齿轮模数 3.按齿根弯曲疲劳强度设计 (1)由式(10-27)试算模数,即 1)确定公式中的各参数值。 ①试选。
行星齿轮传动比分析与计算
行星齿轮传动比分析与计算 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系: , 对于行量轮系: H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==0 3=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W
∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 ∵W 3=0 ∴ ∴ 若Z 1=99 行星轮系传动比是计算出来的,而不是判断出来的。 AH H A H H A H A B i W W W W W i -=-=--= 110H AB AH i i -=1213 223113)1(' ???-=--= Z Z Z Z W W W W i H H H H H H i Z Z Z Z W W W 13 213210' =--H H i Z Z Z Z W W 13 21321 1'=+- H H i i 13 1100100991011??- =10000 1001009910111 111=??- = = H H i i 1001-=H i
机械基础-案例07 闭式斜齿圆柱齿轮传动
闭式斜齿圆柱齿轮传动 设计一闭式斜齿圆柱齿轮传动。已知传递的功率P 1=20kW ,小齿轮转速 n 1=1000r/min ,传动比i=3,每天工作16h ,使用寿命5年,每年工作300天,齿轮对称布置,轴的刚性较大,电机带动,中等冲击,传动尺寸无严格限制。 解:设计步骤见表 1.选定材料、热处理方式、精度等级、齿数等 小轮:40Cr 调质 HB 1=241~286,取260HBW ; 大轮:45调质 HB 2=197~255,取230HBW ; 7级精度 取z 1=27,则大轮齿数z 2=i z 1=3×27=81, 对该两级减速器,取z=1。 初选螺旋角 =14° 2.确定许用弯曲应力 δHlim1=710MPa ,δHlim2=580MPa , δFlim1=600MPa ,δFlim2=450MPa , 安全系数取S Hlim =1.1 S Flim =1.25 N 1=60×1000×5×300×16=14.4×108 N 2= N 1/i=14.4×108/3=4.8×108 得:Z N1=0.975 Z N2=1.043 Y N1=0.884 Y N2=0.903 MPa S Z H N H H 3 .6291.1975.0710][min 1 1lim 1=?== σσ MPa S Z H N H H 550 1 .1043 .1580][min 2 2lim 2=?= = σσ MPa S Y Y F X N F F 32 .42425.11884.0600][min 1 11lim 1=??== σσ MPa S Y Y F X N F F 08 .32525 .11 903.0600][min 2 22lim 2=??= = σσ
行星齿轮机构传动比计算方法
行星齿轮机构传动比计算方法
Key words: epicyclic gear train; speed ratio; compute way. 随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。 行星齿轮传动或称周转轮系。根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。为理解方便,本论文所讨论限于2K-H型周转轮系。 关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。
1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动 Fig 1 Epicyclic gear train 0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、H ω为行星架H 转速、3 ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即1 3 Z Z =α。 1 行星架固定法 机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。 如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为H ωωωω、、、321。我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。那么,此时行星架的转速为()0=-+=H H H H ωωω,相当于行星
圆锥齿轮参数设计
圆锥齿轮参数设计 0.概述 锥齿轮是圆锥齿轮的简称,它用来实现两相交轴之间的传动,两轴交角S称为轴角,其值可根据传动需要确定,一般多采用90°。锥齿轮的轮齿排列在截圆锥体上,轮齿由齿轮的大端到小端逐渐收缩变小,如下图所示。由于这一特点,对应于圆柱齿轮中的各有关"圆柱"在锥齿轮中就变成了"圆锥",如分度锥、节锥、基锥、齿顶锥等。锥齿轮的轮齿有直齿、斜齿和曲线齿等形式。直齿和斜齿锥齿轮设计、制造及安装均较简单,但噪声较大,用于低速传动(<5m/s);曲线齿锥齿轮具有传动平稳、噪声小及承载能力大等特点,用于高速重载的场合。本节只讨论S=90°的标准直齿锥齿轮传动。 1. 齿廓曲面的形成 直齿锥齿轮齿廓曲面的形成与圆柱齿轮类似。如下图所示,发生平面1与基锥2相切并作纯滚动,该平面上过锥顶点O的任一直线OK的轨迹即为渐开锥面。渐开锥面与以O为球心,以锥长R为半径的球面的交线AK为球面渐开线,它应是锥齿轮的大端齿廓曲线。但球面无法展开成平面,这就给锥齿轮的设计制造带来很多困难。为此产生一种代替球面渐开线的近似方法。 2. 锥齿轮大端背锥、当量齿轮及当量齿数 (1) 背锥和当量齿轮 下图为一锥齿轮的轴向半剖面,其中DOAA为分度锥的轴剖面,锥长OA称锥距,用R 表示;以锥顶O为圆心,以R为半径的圆应为球面的投影。若以球面渐开线作锥齿轮的齿廓,则园弧bAc为轮齿球面大端与轴剖面的交线,该球面齿形是不能展开成平面的。为此,再过A作O1A⊥OA,交齿轮的轴线于点O1。设想以OO1为轴线,以O1A为母线作圆锥面O1AA,该圆锥称为锥齿轮的大端背锥。显然,该背锥与球面切于锥齿轮大端的分度圆。由于大端背锥母线1A与锥齿轮的分度锥母线相互垂直,将球面齿形的圆弧bAc投影到背锥上得到线段 b'Ac',圆弧bAc与线段b'Ac'非常接近,且锥距R与锥齿轮大端模数m之比值愈大(一般R/m>30),两者就更接近。这说明:可用大端背锥上的齿形近似地作为锥齿轮的大端齿形。由于背锥可展开成平面并得到一扇形齿轮,扇形齿轮的模数m、压力角a和齿高系数ha*等参数分别与锥齿轮大端参数相同。再将扇形齿轮补足成完整的直齿圆柱齿轮,这个虚拟的圆
锥齿轮计算模版.pdf
锥齿轮传动设计 1.设计参数 1150 150********=====d d z z u 式中:u ——锥齿轮齿数比; 1z ——锥齿轮齿数; 2z ——锥齿轮齿数; 1d ——锥齿轮分度圆直径(mm ) ; 2d ——锥齿轮分度圆直径(mm ) 。 1.1062 1115021)2()2(2212221=+=+=+=u d d d R mm 25.125)33.05.01(150)5.01(11=???=?=R m d d φ mm 同理 2m d =125.25 mm 式中:1m d 、2m d ——锥齿轮平均分度圆直径(mm ); R φ——锥齿轮传动齿宽比,最常用值为R φ=1/3,取R φ=0.33。 530 150111===z d m 同理 2m =5 式中:1m 、2m ——锥齿轮大端模数。 175.4)33.05.01(5)5.01(11=???=?=R m m m φ 同理 2m m =4.175 式中:m m 1、m m 2——锥齿轮平均模数。 2.锥齿轮受力分析 因为锥齿轮1与锥齿轮2的传动比为1,且各项数据相同,则现以锥齿轮1为分析对象得:
1250150 83.932211=?==m t d T F N 88.88345cos 45tan 1250cos tan 111=????==δαt r F F N 88.88345cos 45tan 1250sin tan 111=????==δαt a F F N 22.133020cos 1250cos 11=? ==αt n F F N 式中;1t F ——锥齿轮圆周力; 1r F ——锥齿轮径向力; 1a F ——锥齿轮轴向力; 1n F ——锥齿轮法向载荷; α——锥齿轮啮合角; δ——锥齿轮分度角。 3.齿根弯曲疲劳强度计算 (1) 确定公式内的各计算数值 1) 由《机械设计》图10-20c 查得锥齿轮的弯曲疲劳强度极限=1FE σ580MPa 2) 由《机械设计》图10-18取弯曲疲劳寿命系数=1FN K 1 3) 计算弯曲疲劳许用应力 取弯曲疲劳安全系数S =1.4,由《机械设计》式(10-12)得 =?==4 .15801][111S K FE FN F σσ414.29 MPa 4) 计算载荷系数K 23.235.111.15.1=???==βαF F v A K K K K K 5) 查取齿形系数 由《机械设计》表10-5查得8.21=Fa Y 6) 查取应力校正系数 由《机械设计》表10-5查得55.11=Sa Y
齿轮传动强度设计计算
直齿轮箱尺寸变化影响传动强度分析
阮超
传递:功率P,转速n,扭矩T
齿轮:齿数Z,齿宽b,模数m,材料强度σ 强度公式: 弯曲 T∝b(Zm)mσ 接触 T∝b(Zm)2σ2(体积关联) 条件变化: 1.齿轮箱外形尺寸不变,n2=3600r/min, m2=4mm,求P2? 弯曲 模数变化4/3,转速变化3600/3000, P2=120*4/3KW 接触 体积不变,转速变化3600/3000,P2=120KW;
弯曲变化机理:齿形变大 接触变化机理:P=T*n/9550
已知:功率P1=100KW,转速n1=3000r/min,模数m1=3mm
直齿轮箱尺寸变化影响传动强度分析
阮超
传递:功率P,转速n,扭矩T
齿轮:齿数Z,齿宽b,模数m,材料强度σ 强度公式: 弯曲 T∝b(Zm)mσ 接触 T∝b(Zm)2σ2(体积关联) 条件变化: 2.齿轮箱齿数不变,n2=3600r/min, m2=4mm,求P2? 弯曲 模数变化4/3,转速变化3600/3000, P =120*(4/3) KW 接触 模数变化4/3,转速变化3600/3000, P =120*(4/3) KW
2 2 2 2
弯曲变化机理:力臂和曲率半径增大 接触变化机理:单位齿宽负载和直径增大
已知:功率P1=100KW,转速n1=3000r/min,模数m1=3mm
直齿轮箱尺寸变化影响传动强度分析
阮超
传递:功率P,转速n,扭矩T
齿轮:齿数Z,齿宽b,模数m,材料强度σ 强度公式: 弯曲 T∝b(Zm)mσ 接触 T∝b(Zm)2σ2(体积关联) 条件变化: 3.齿轮箱尺寸放大4/3倍,n2=3600r/min, 求P2? 弯曲 模数变化4/3,转速变化3600/3000, P =120*(4/3) KW 接触 模数变化4/3,转速变化3600/3000, P =120*(4/3) KW
2 2 3 3
弯曲变化机理:齿宽b,模数m增大 接触变化机理:齿宽b,模数m增大
已知:功率P1=100KW,转速n1=3000r/min,模数m1=3mm