水草切割装置的研究现状与发展趋势-文献综述
水草切割装置的研究现状与发展趋势
摘要:简述了国内外水草收割机的历史和发展,对于现有水草切割装置分别从切割器形式、体积、作业对象、功率、适合水域方面阐述优缺点。分别列举了往复式切割器和圆盘锯齿切割器的参数、切割原理、优缺点等情况,并且介绍了新型切割器。最后总结提出应开发可快速拆卸组合水草切割装置来应对现今的水草治理问题的观点。
关键词:割草装置;小型;现状;趋势
Research status and development trend of aquatic plants
mowing apparatus
(College of Engineering, Shanghai Ocean University, Wang Xiangchun M110601608) Abstract: Brief history and development of domestic and international Aquatics Harvester, existing from cutting grass cutting device, volume, power, job objects, suitable for water describe advantages and disadvantages. Listed separately to multiple parameters and circular saw-tooth cutter for cutting, cutting principles, advantages and disadvantages, and introduced the new cutter. Final summary of proposed development can be assembled quickly demolished the reeds of grass cutting device to respond to present day governance issues.
Key words: Mowing apparatus; Small; The status quo; Trend
1 引言
当前,受工业化和人类活动的影响,许多江河湖泊水质恶化,以湖泊、水库、干渠内沉水植物异常繁殖为主要特征的水体富营养化状况日趋严重。在大型水生植物响应型的草型湖泊内,各种挺水植物和沉水植物过量生长,其群落盖度可达100%,最大生物量(湿质量)为22.5 kg/m2以上,形成了极大的初级生产力,河网水域杂草泛滥,一下雨、一放水,水草从乡村内河内湖涌入大江大河,成为一大景观[4]。大量沉水植物充塞水体空间,自生自灭,破坏自然景观,危害渔业生产,腐败后沉积水底,不仅污染水质,而且加速了生物填平作用,促进沼泽化过程,危害了湿地生态系统的良性循环。如果不及时打捞上岸,又会腐烂变臭,重新污染水质,已严重影响到航道的运输、水道的防洪排涝、城市环境的美化,有的甚至使水质恶化影响人类健康,水生植物的治理急需解决[16]。
2 国内外水草切割装置分析比较
荷兰等国[11]早在50年代就开始使用专门的水利机械进行河道的清淤除草作业。荷兰的IHC CO Konijn机械厂1958年研制出H系列两栖式挖泥船共6种机型,随后又相继开发出M系列、S系列和FB系列等多种清淤机械;荷兰的HERDER公司也开始研制各种机型的河道除草机。起初他们一般是把切割器安装在液压挖掘机或农用拖拉机上,把沟渠、河道内的蒲草、杂草切割后捞起放于岸边,其整机需停在岸边或沿岸边行驶进行作业,这就是陆用割草机。由于陆用割草机的使用范围有较大限制,河道、沟渠旁常植有树木,无法停机,远离岸边的水草又无法切割到,因此研制一种能在河道中航行的水中割草机应运而生。
60年代,英国的Rolbe公司开发出Gibeaux系列水中割草机[29],英国的John Wilder(工程)公司[33]也开发出自己的系列产品,30多年来,这些产品至今还在世界各地广泛使用。
由于水草的疯狂蔓延造成水域生态环境的恶化,自水中作业的水草收割机产生以来,引起了越来越多的生产厂家和研究机构的重视。根据现有资料可知[7],国外研究水草收割机的比较有影响的厂家有美国advanced acquatics公司[30],目前该公司已经开发出来的产品有H系列,H 4、H 7、H 8、H 10四种型号数十种产品;美国aquam arine公司[30],该公司研制有EH、H、HM三大系列产品;荷兰IHCCOKONIJIN 机械厂和HEEDER公司,英国的ROLBE公司和JOHNW ILDER(工程)公司,澳大利亚、日本、俄罗斯、德国也有相类似的产品。
1992年北京市水利局为了清除京密运河上的各类水草,加快水的流速,减少沿路水的损耗,特邀请了水利系统几家设计和生产单位联合开发水中割草机[26],SGY-2.5型水中割草机即是其开发的产品之一。该机与国内其它型号的割草机相比,具有不缠草、割草效果好、有避让保护系统等诸多优点。
国内也有一些相关的企业及研究机构进入该领域,并且取得了一定的研究成果,如宁波农业机械研究所、象山农机厂、绍兴县农林管理总部联合研制的WH 1800型河道清草机[8-9],上海电器集团现代化农业装备有限公司新液压厂开发的GC2230型河道割草保洁船以及GC2000型小型河道割草作业机械[10 ],内蒙古农业大学机电工程学院设计的9GSCC-1.4型水生植物收割机船队[11],北京劳模亚洲环保设备有限公司设计生产的LW 5000多功能劳模水草收割船。些产品外型大,长度都大于8m,需要多人及辅助机械协同作业,适用于大型水域水草的收割。而景观水域的设计通常都采用自然造型,有各种不同的曲线,且水面较为狭小,不利于大型机械作业。
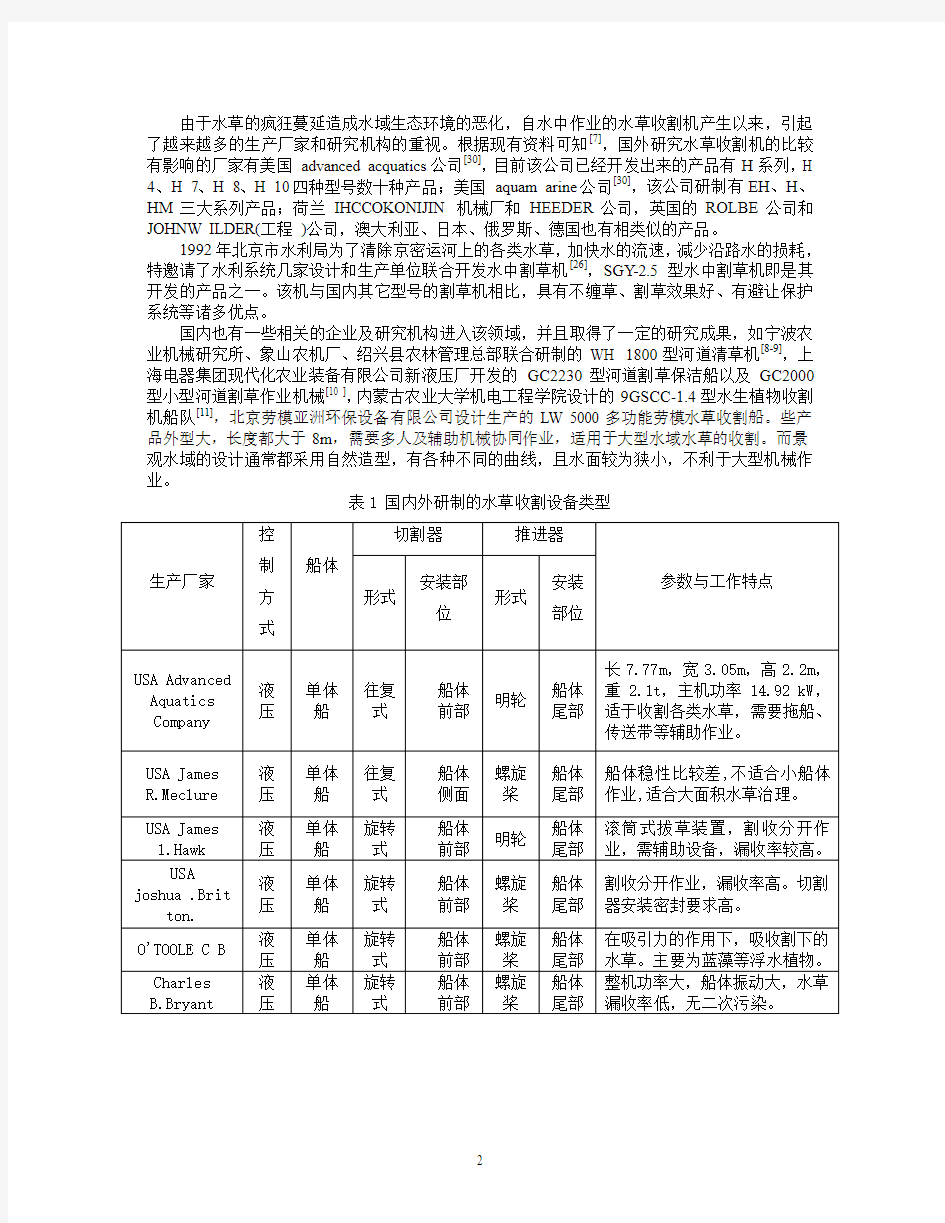
表1 国内外研制的水草收割设备类型
生产厂家控
制
方
式
船体
切割器推进器
参数与工作特点形式
安装部
位
形式
安装
部位
USA Advanced Aquatics
Company 液
压
单体
船
往复
式
船体
前部
明轮
船体
尾部
长7.77m,宽3.05m,高2.2m,
重2.1t,主机功率14.92 kW,
适于收割各类水草,需要拖船、
传送带等辅助作业。
USA James R.Meclure 液
压
单体
船
往复
式
船体
侧面
螺旋
桨
船体
尾部
船体稳性比较差,不适合小船体
作业,适合大面积水草治理。
USA James l.Hawk 液
压
单体
船
旋转
式
船体
前部
明轮
船体
尾部
滚筒式拔草装置,割收分开作
业,需辅助设备,漏收率较高。
USA joshua .Brit
ton. 液
压
单体
船
旋转
式
船体
前部
螺旋
桨
船体
尾部
割收分开作业,漏收率高。切割
器安装密封要求高。
O'TOOLE C B 液
压
单体
船
旋转
式
船体
前部
螺旋
桨
船体
尾部
在吸引力的作用下,吸收割下的
水草。主要为蓝藻等浮水植物。
Charles B.Bryant 液
压
单体
船
旋转
式
船体
前部
螺旋
桨
船体
尾部
整机功率大,船体振动大,水草
漏收率低,无二次污染。
北京市水利局液
压
单体
船
往复
式
船体
前部
明轮可调
长5m,宽2m,高2m,重4.4t,
主机功率26.47 kW,需辅助作业。
宁波农业机械研究所等单位联合研制液
压
单体
船
往复
式
船体
前部
螺旋
桨
船体
尾部
长6.1m,宽2.5m,高0.75m,重
5.5t,功率14.71 kW,需辅助作
业。
USA Carl V.
olson 液
压
单体
船
往复
式
船体
尾部
螺旋
桨
船体
尾部
割收分开作业,需要辅助设备协
同工作,切割器受冲击,损伤比
较大。
上海电气集团现代农业装备成套有限公司液
压
单体
船
往复
式
船体
前部
明轮
船体
腰部
长14.3m,宽4.25m,高2.54m,
重9t,适合大型水域。
对国内外典型水草收割机进行比较后, 不难发现它们具有以下特点。
( 1) 液压控制。大部分水草收割机明轮的动作、切割器的工作以及传送带的升降都是采用液压控制的方式来实现的,该种控制方式的优点是能够实现无级变速,方便灵活地控制切割器以及明轮的工作速度。
( 2) 明轮驱动。在所有的水草收割机当中, 最常用的驱动装置是明轮, 而且一般情况下, 都是安装在船体的尾部。只有SGY - 2. 5型水中割草机这种水草收割机的明轮安装是比较柔性化的,充分考虑到了水草收割机的各种工况, 可以任意改变明轮的安装位置。
( 3) 往复切割。大部分产品都采用往复式切割器, 并且安装的位置都是在船体的前部, 比较少的情况是采用旋转式的切割器, 这样有利于避免缠绕等问题的产生。
( 4) 辅助设备。所有典型水草收割机械都需要有辅助机械(输送带、拖船等)来协助工作, 才能连续完成大量作业。
由上表可以看出,现有水草切割装置,都具有体积大,机船一体化,适合大型水域工作特点。所以小水域水草切割问题亟待解决。
3. 市场现有水草切割器主要分类
3.1往复式切割器
收割机切割装置由切割器和割刀传动装置组成。水草收割机的作业类似牧草收获机械和稻麦收获机械,采用往复式切割器。割刀传动装置将动力传递给割刀,同时将旋转运动改变为往复式直线运动,实现切割过程[4]。牧草收获机械的割刀传动装置位于切割器的侧面,其曲柄连杆机构与切割器在同一平面内,或通过分析可以简化在同一平面内,曲柄连杆机构与切割器所受力系为平面力系。水草收割机的切割器是切割装置中的一个重要部件,它影响作业质量和生产率,目前采用的主要有3种:绳索式,国外曾采用,适合只割不收的切割船上[14];旋转式,湖北监利县农机研究所设计的收获机上采用,缠绕问题十分严重。如采用圆盘式割刀,由于旋转轴极易缠绕沉水植物,轴架支承部分易拖挂成团沉水植物且与捡拾输送器不易配置而无法正常工作[23];经实验在水下切割沉水植物以往复式切割器为宜。从设计条件考虑选用标准无护刃器双动大刀片式较理想。割刀传动装置将动力传递给割刀,同时将旋转运动改变为往复式直线运动,实现切割过程[18]。水草收获机械的割刀传动装置位于切割器的侧面,其曲柄连杆机构与切割器在同一平面内或通过分析可以简化在同一平面内,曲柄连杆机构与切割器所受力系为平面力系。割刀传动装置要与水面成一定的入水角度驱动切割器在水下做平行于水面的往复直线运动对水草进行切割。往复式割刀的运动是一种变速度运动,切割过程中随着切割速度的增加,切割阻力下降,但惯性力增加,一般收获牧草的平均切割速度大于1 m/s[35]。
沉水植物收获机械在设计上应满足水域工作条件、沉水植物的物料特性和切割、捡拾及输送的工作特性要求,防止沉水植物在切割器、捡拾器前部堵塞,在曲柄连杆机构挂草及在旋转部件上缠草,等等。水草切割装置部件的造型、设计和参数计算应根据设计学的要求和物料特性[30]。
沉水植物在收割过程中遇到旋转部件均会产生缠绕现象,造成脱链、跳链现象及增加功率消耗,严重者导致无法正常生产。因此在结构设计上必须采取防缠绕措施,如在旋转部件与非旋转部件中间的间隙处设防缠绕罩,使沉水植物无法通过这一缝隙,从而避免缠绕在旋转部件上。选择往复式切割器则能避免切割器被缠绕和堵转的问题,即使遇到强度、韧性比较大的水草,切割器的刀片也能依靠高速运动将水草割断[6]。
3.2 圆锯齿切割器
圆锯齿切割器是市场现有最普遍的切割器形式,当刀盘高速旋转时,在离心力作用下保持其切割状态。当阻力过大或遇障时,刀片即回摆,避免损坏。刀片一边刃口磨损后可以换边使用。更换刀片也较往复式割草机方便。在旋转式割草机上,除装有与往复式割草机相似的安全装置外,在切割器上方还加设防护罩,以保证人身安全。切割速度(刀片刃口根部的圆周速度)高达60~90米/秒[12]。工作平稳,作业前进速度可达15公里每小时以上[13]。其特点是对牧草的适应性强,适用于高产草场,但切割不够整齐,重割较多,单位割幅所需功率较大[24]。
在旋转式割草机上,除装有与往复式割草机相似的安全装置外,在切割器上方还加设防护罩,以保证人身安全。1.割草机割草之前,必须先清除割草区域内的杂物,以免损坏打草头、刀片。冷机状态下启动发动机,应先关闭风门,启动后再适时打开风门。若草皮面积太大.割草机连续工作时间最好不要超过4小时。2.割草机使用后,应对其进行全面清洗,并检查所有的螺钉是否紧固,刀片有无缺损,检修高压帽等,还要根据割草机的使用年限,加强易损配件的检查或更换[19]。
圆锯齿切割器装置是依靠高速旋转刀盘上的刀片冲击切割草类,所以适合水面以上的草类切割,在水下会有巨大阻力,不适合在水下运行。
4新型切割器
水草切割器的顺利作业一般要满足下列条件:(1)必须在水下完成切割,捡拾和输送。切割深度能在较大范围内任意可调,不应发生漏割、漏收现象,水下输送通畅。(2)有较高的生产率。要求根据不同的切割深度,割幅和作业速度合理配置动力。(3)防缠绕。各机构,零部件在航行和作业时,不能发生被物料缠绕现象。(4)作业连续。沉水植物收获机械需有相应的配套设备,如装载船,运输牵引船等,配套设备的运载能力和数量应与收获机械生产能力协调,设备间有良好的衔接。(5)较高的航速和适中的作业速度。航速应在5km/h以上,作业速度应高于2.5km/h。(6)操纵灵活,转弯半径小于5.5米(7)安全性。在航行和作业时整机平稳,且在4级风速下不发生走偏。(8)可靠性。沉水植物收获机械为季节性作业,保养和维护均在水中进行,难度较大。(9)防腐性。要求船体及相关零件进行防腐处理,以降低水及腐烂的物料造成的腐蚀。
国内割草机多采用农业机械上广泛使用的往复式切割器,它由护刀器、动刀片、定刀片和压刀器成。为了保证动刀片的前端能顺利地切入农作物茎杆,动刀片和定刀片之间必须保持2°~3°的倾角,以使动定刀片之间有0.2~0.3毫米的间隙[32]。当切割细长而又柔软的水草时,动刀片极容易把水草拉入动、定刀片间的缝隙中,造成切割器堵塞。另外,这种切割器只能把草的根和茎切断,但对丛生于水下的互相交叉缠绕的水草茎叶却不能切开,这样就会产生捆草、捆船现象,使作业效率大大下降,甚至无法作业。水草切割机采用的U字形切割器就彻底解决了上述问题,它由以下几部分组成:
3.3 U型切割器
1. 横梁
2. 弓形刀架
3. 东刀片
4. 定刀片
1.横梁。呈矩形断面,中间装有切割刀具的驱动马达,两端与刀架相连,内部装有连杆且与动刀片连。
2.弓形刀架。由槽型断面构成,其上铆有定刀片和压刀器。整个刀架呈U字形,左、下、右三面都有切割刀刃,当动刀片错动时,三面同时切割,这样水草成块状切下,避免了互相缠绕产生的捆草和缠刀现象。
3.动刀片。整条锯用弹性钢片制成,其上装有控制横向和径向运动的滚轮,确保其沿刀架按固定路线运动。滚轮由耐磨性良好的MC铸型尼龙制成。动刀片靠自身的弹力(可调节绷紧度)压紧在定刀片,避免了堵刀现象的发生[27]。
5发展趋势
5. 1 小型化
当前市场上所有水草收割机都是大型机械,满足大型湖泊水草的收割与修理,但不适合小型河道和湖泊等小水面水域中水草的收割。随着人民生活水平的提高,水域生态景观旅游开发将成为今后城市环境建设的重中之重。拿上海来说,根据规划,上海市2005年的理想水面率不低于8.4%,到2010年增至9% (需增加水面积设八个大型水域生态景观的人工湖泊。另外,到2020年,我国将建成300多家大型高尔夫球场[14],每家高在都用生态的方法进行治理,其中种植水草是必不可少的,为了有效维护水域的生态平衡,收割机是不可缺少的,所以水草收割机的需求量将会越来越大。但是这些水域生态景观和人工湖泊大部分面积小,分散度较大,造型不规则,有的地方非常狭小,不利于大型收割机械的行进和转弯。目前这些水域中的水草的收割都由人工完成,劳动强度大,效率低。而且往往在水草疯长时,人工收割跟不上生长速度,一部分水草因未及时收割而腐烂水中,造成水质恶化。所以小型水上收割机的需求量会越来越大,小型轻便、美观环保的水草收割机将是一个重要的发展方向。
5.2 自动化
目前水草收割机的操作都由人工来完成,在大型的水草收割船上一般有2~ 3[27]人进行操作。但随着水草收割机的小型化,它的收割和集草都要在同一条船上进行,由于空间有限,最多只能由一人操控,若都是手动操作的话,会不太方便,所以应该提高水草收割机的自动化程度,特别是遥控式的水草收割机不仅能进一步减小船体的尺寸,增大储草空间,而且安全,将会是小型水草收割机的一个发展方向。
6分析与建议
随着我国许多河域的富营养化现象而产生的水草严重灾害现象日益严峻,开发经济、适宜的水草收集机械装置变得必要。采用机械和生物治理相结合的方法将是当前最优的选择。如何
选择合适的机械来面对不同的环境和形式?随着水草切割机械装置的发展,现今市面上已经有许多种不同的机械来分别的有效地应对各种情况。现在市面上大多为大型机械,很难在内陆小水域运行。虽然,现在有向小型化、智能化、无人化发展的水草收集机[17],但由于以下几点仍然无法取代传统水草切割装置:价格昂贵、技术不成熟、稳定性没有传统的高、效率较低。所以开发可快速拆卸组合的水草切割装置将更具有前景。可快速拆卸组合的水草切割装置将通过固定装置与任意种类的船相结合。可以开发不同种类的水草收割装置,需要时仅仅购买需要的机械安装到自己的船上。不仅降低了成本,还能减少体积占用,更能在机械损坏时方便维修更换。从这些方面来讲可快速拆卸组合将是水草切割机械方面很好的发展方向。
根据市场现有切割装置分析,往复式割草装置依靠切割器上动刀和定刀的相对剪切运动切割草类,其特点是割茬整齐,单位割幅所需功率较小;但对草类不同生长状态的适应性差,易堵塞。适用于平切割速度一般低于3米每秒[34],作业前进速度一般为6~8公里每小时[32]。水草收割装置宜采用往复式割刀,以避免较大的水阻力和缠绕堵转问题。
参考文献
[1] 王艳红.纽荷兰机械简介.农业机械,2002,(4).
[2] T.T.KYCOB.MB-1 型手拖挠性传动割草机的研制.农牧与食品机械.1991,(2).
[3] 朱黎.圆盘锯片割刀.机械研究,1997,(10).
[4] 朱海燕,戴学颖,陈孝君.于桥水库富营养化现状及水草控制措施.水科学与工程技
术,2010,(2):16-17.
[5] 吴文庆,洪渊扬,秦双亭. 水葫芦治理技术的初步研究.上海环境科学,2003年,(增刊):146-149.
[6] 龚云丽,蔡永立.我国城市杂草的研究.杂草科学,2005,(3):6-9.
[7] 崔立,肖怀平,陈鲁勇,徐燕,黄赢子,褚建君.淀山湖水葫芦用于饲喂生长育肥猪的效果研究.
饲料工业,2004,(3) .
[8] 杨宣华,麦焯棉,许波,罗岚,潘卫南,罗月兰.水葫芦培养料栽培平菇试验,佛山科学技术学院学
报(自然科学版),2004,(3).
[9] 吴世铭.水陆联动机械快速打捞法在水口库区水葫芦集中整治中的应用.福建农业学
报,2007,22(1): 110-113.
[10] 马中喜. WH1800型河道清草机.中国农机化,2003,(03).
[11] Daniel Smith.Marine weedwaker:USA,6922982 Bl[P].2005-8-2.
[12] Charles B. Bryant. AQUATIC HARVESTING https://www.360docs.net/doc/5b13722028.html,A, 4258534[P].1979-3-7.
[13] James L,Hawk. Apparatus for remocal of aquatic plant growth:USA,5069023[P].1992-10-10.
[14] 扬诗鸿.SGY-2.5型水中割草机的设计和研制[J].水利电力施T机械,1997,19(4):12-15.
[15] 政生,黎启柏,张未,等.GC2230型河道割草保洁船[J].上海造船,2004(2):22-24.
[16] 李旭英,尚士友,杜建民,等.9GSCC-114H型沉水植物收割机船队的设计[J].农业机械学
报,2006,37(1):59-62.
[17] 陈灏,周莹,许东员.小型电动可遥控水草收割机的研制.安徽农业科学,2010,38(26):14791—
14792.
[18] 胡君智.小型多用途打捞装置的设计.上海造船,2008,(4):69-70.
[19] 杨伟男.PLC控制器在垃圾收集船上的应用探讨.珠江水运,2001年2月,36-38.
[20] 黎启柏,肖长周.水面垃圾打捞机械手及其液压驱动系统.华南理工大学学报(自然科学
版),1996年2月,24(2):150-152.
[21] 张林根. 内河打捞船设计概要.船舶设计技术交流,1991年4月,1991(4).:30-32.
[22] 谭政生,黎放柏.16.5米水面垃圾收集船设计.广东造船,1995年,(2):1.
[23] 张丽珍,陈金稳,李俊等.SCSGJ-2.6型水草收割机的研制.西北农林科技大学学报(自然科学
版),2008,36(11):229-234.
[24] 李娇,关长涛,徐希尧,等.射流式浒苔打捞机的设计与试验.渔业现代化,2009,(1):35-37.
[25] 陶海龙,刘敏,张龙.环保型水面垃圾清理收集船.科技创新与品牌,2010,(7):3.
[26] 赵国兴.9SCGC-1.5型水草收割船的研制.农业科技与装备,2010年12月,198(12):33-34.
[27] 梁维铸,黄福明,游国显.带式垃圾收集船设计的探索和实践.广东造船,2001年,(2):1.
[28] 杜健民,尚士友,丁海泉.沉水植物收获机械设计学的研究.内蒙古农牧学院学
报,1995,15(3):79-82.
[29] Thomson Sinkala, Enala T. Mwase , Mick Mwala. Control of aquatic weeds through pollutant
reduction andweed utilization: a weed management approach in the lowerKafue River of Zambia.
Physics and Chemistry of the Earth,002,(27):983-991.
[30] R Charudattan. Are we on top of aquatic weeds? Weed problems, control options, and
Challenges,Plant Pathology Department and Center for Aquatic and Invasive Plants, USA, 2001 [31] D. G. Cross. Aquatic Weed Control using Grass Carp.Journal of Fish Biology,anuary 1969,
1(1):27-30.
[32] Brian J. Midtling et al. Method and apparatus for harvesting aquatic plants. U.S. PATENT
DOCUMENTS,13 Sep 1991, 5197263.
[33] Andrew J. Rodusky, Bruce Sharfstein, Therese L. East and Ryan P. Maki. A Comparison of
Three Methods to Collect Submerged Aquatic Vegetation in a Shallow Lake. Environmental Monitoring and Assessment,110(1-3):87-97.
[34] T. RAMAPRABHU AND V. RAMACHANDRANl. Developments in Aquatic Weed Control
Research in India Relating to Fisheries. J. Aquat. Plant Manage,1984,(22): 97-100.
[35] 张丽珍,陈金稳,李俊.水草收割机的研究现状.上海水产大学学报, 2008年7月,7(4):486-492.
[36] 孙明敏.河道清草机的研制.中国农机化,2005,(6):91-94.
龙门起重机文献综述
毕业设计(论文) 文献综述 题目轨道式龙门起重机 专业机械设计制造及其自动化 班级06级1班 学生陈成 指导教师周老师 西南交通大学 2010-4-27 年
1、轨道式集装箱龙门起重机国内发展现状 在我国集装箱港口的装卸作业中,通常采用岸边集装箱起重机加轮胎式集装箱龙门起重机的装卸方案,以轮胎式集装箱龙门起重机作为后方堆场的主要装卸机械。几年,随着港口的发展,轨道式集装箱龙门起重机在港口的使用越来越多。其电控系统、管理系统等方面以达到现有的港口机械水平,完全能满足现代港口集装箱的需要。 目前我国已能批量生产具有上个世纪90年代国际先进水平的岸边集装箱起重机和轮胎式集装箱龙门起重机,轨道式集装箱龙门起重机的研究与开发能力也越来越强。 由于大车行走和小车行走属于一般负载,没有特殊要求,因此变频器在V/F模式下即可正常工作,不需要做特殊设置就能投入使用,而主副钩吊属于重型负载,要求起钩和松钩都能保证不溜钩,上下行平稳迅速,要求在直流制动后马上投入制动器进行制动。 2、轨道式集装箱龙门起重机国外发展现状 长期以来,轨道式集装箱龙门起重机仅小车运行机构采用交流驱动,近年来,起升机构和大车运行也相继采用了交流驱动技术,这样减少了维护和修理费,降低了营运成本。日本三井公司最早成功地采用了交流变频调速装置,解决了起升机构位势负载和车轮支承压力变化导致车轮转速变化的关键技术,达到了集装箱堆6层作业的使用要求。派纳公司将其在自动控制领域所拥有的丰富经验成功地应用在大型轨道式集装箱龙门起重机上,满足了现代化集装箱堆场对自动化控制的需要。欧洲联合码头公司应用光缆传输技术,可靠地将轨道式集装箱龙门起重机与港站管理计算机联网,实现了无人装卸作业和堆场全盘自动化。 据统计,欧洲作为传统上的轮胎式集装箱龙门起重机的大订户,1995年订购的轨道式集装箱龙门起重机多达58台,从一个侧面反映出轨道集装箱龙门起重机的市场潜力和应用前景。另一方面,从世界一些著名的港口的发展趋势看,轨道式集装箱龙门起重机将向大型化、高效化、自动化方向发展。 目前,一些先进设计思想逐渐被采用,一些先进设计手段也被引入轨道式集装箱龙门起重机领域。如果有限元分析、结构优化设计、机电液一体化技术、CAD设计模块化技术、可靠性设计方法、机械结构动态设计等。这些方法在轨
国内外研究综述范文国内外文献综述写
国内外研究综述范文国内外文献综述写你的文献综述具体准备往哪个方向写,题目老师同意了没,具体有要求要求,需要多少字呢? 你可以告诉我具体的排版格式要求,文献综述想写好,先要在图书馆找好相关资料,确定好题目与写作方向。老师同意后在下笔,还有什么不了解的可以直接问我,希望可以帮到你,祝写作过程顺利。 文献综述是研究者在其提前阅读过某一主题的文献后,经过理解、、融会贯通,综合分析和评价而组成的一种不同于研究论文的文体。 2) 文献综述的写作要求 1、文献综述的格式文献综述的格式与一般研究性论文的格式有所不同。这是因为研究性的论文注重研究的方法和结果,而文献综述介绍与主题有关的详细资料、动态、进展、展望以及对以上方面的评述。因此文献综述的格式相对多样,但总的来说,一般都包含以下四部分:即前言、主题、总结和 ___。撰写文献综述时可按这四部分拟写提纲,再根据提纲进行撰写工作。前言,要用简明扼要的文字说明写作的目的、必要性、有关概念的定义,综述的范围,
阐述有关问题的现状和动态,以及目前对主要问题争论的焦点等。前言一般200-300字为宜,不宜超过500字。正文,是综述的重点,写法上没有固定的格式,只要能较好地表达综合的内容,作者可创造性采用诸多形式。正文主要包括论据和论证两个部分,通过提出问题、分析问题和解决问题,比较不同学者对同一问题的看法及其理论依据,进一步阐明问题 ___和作者自己的见解。当然,作者也可从问题发生的历史背景、目前现状、发展方向等提出文献的不同观点。正文部分可根据内容的多少可分为若干个小标题分别论述。小结,是结综述正文部分作扼要的总结,作者应对各种观点进行综合评价,提出自己的看法,指出存在的问题及今后发展的方向和展望。内容单纯的综述也可不写小结。 2、文献综述规定 为了使选题报告有较充分的依据,要求硕士研究生在论文开题之前作文献综述。 2. 在文献综述时,研究生应系统地查阅与自己的研究方向有关的国内外文献。通常阅读文献不少于30篇,且文献搜集要客观全面 3. 在文献综述中,研究生应说明自己研究方向的发展历史,前人的主要研究成果,存在的问题及发展趋势等。
机器视觉技术发展现状文献综述
机器视觉技术发展现状 人类认识外界信息的80%来自于视觉,而机器视觉就是用机器代替人眼来做 测量和判断,机器视觉的最终目标就是使计算机像人一样,通过视觉观察和理解 世界,具有自主适应环境的能力。作为一个新兴学科,同时也是一个交叉学科,取“信息”的人工智能系统,其特点是可提高生产的柔性和自动化程度。目前机器视觉技术已经在很多工业制造领域得到了应用,并逐渐进入我们的日常生活。 机器视觉是通过对相关的理论和技术进行研究,从而建立由图像或多维数据中获机器视觉简介 机器视觉就是用机器代替人眼来做测量和判断。机器视觉主要利用计算机来模拟人的视觉功能,再现于人类视觉有关的某些智能行为,从客观事物的图像中提取信息进行处理,并加以理解,最终用于实际检测和控制。机器视觉是一项综合技术,其包括数字处理、机械工程技术、控制、光源照明技术、光学成像、传感器技术、模拟与数字视频技术、计算机软硬件技术和人机接口技术等,这些技术相互协调才能构成一个完整的工业机器视觉系统[1]。 机器视觉强调实用性,要能适应工业现场恶劣的环境,并要有合理的性价比、通用的通讯接口、较高的容错能力和安全性、较强的通用性和可移植性。其更强调的是实时性,要求高速度和高精度,且具有非接触性、实时性、自动化和智能 高等优点,有着广泛的应用前景[1]。 一个典型的工业机器人视觉应用系统包括光源、光学成像系统、图像捕捉系统、图像采集与数字化模块、智能图像处理与决策模块以及控制执行模块。通过 CCD或CMOS摄像机将被测目标转换为图像信号,然后通过A/D转换成数字信号传送给专用的图像处理系统,并根据像素分布、亮度和颜色等信息,将其转换成数字化信息。图像系统对这些信号进行各种运算来抽取目标的特征,如面积、 数量、位置和长度等,进而根据判别的结果来控制现场的设备动作[1]。 机器视觉一般都包括下面四个过程:
机械类英文参考文献
Int J Interact Des Manuf(2011)5:103–117 DOI10.1007/s12008-011-0119-7 ORIGINAL PAPER Benchmarking of virtual reality performance in mechanics education Maura Mengoni·Michele Germani· Margherita Peruzzini Received:27April2011/Accepted:29April2011/Published online:27May2011 ?Springer-Verlag2011 Abstract The paper explores the potentialities of virtual reality(VR)to improve the learning process of mechanical product design.It is focused on the definition of a proper experimental VR-based set-up whose performance matches mechanical design learning purposes,such as assemblability and tolerances prescription.The method consists of two main activities:VR technologies benchmarking based on sensory feedback and evaluation of how VR tools impact on learning curves.In order to quantify the performance of the technol-ogy,an experimental protocol is de?ned and an testing plan is set.Evaluation parameters are divided into performance and usability metrics to distinguish between the cognitive and technical aspects of the learning process.The experi-mental VR-based set up is tested on students in mechanical engineering through the application of the protocol. Keywords Mechanical product design·Virtual reality·Experimental protocol·Learning curve· Mechanics education 1Introduction Modern society is dominated by continuous scienti?c and technical developments.Specialization has become one of the most important enablers for industrial improvement.As a result,nowadays education is more and more job-oriented and technical education is assuming greater importance.In this context both university and industry are collaborating to create high professional competencies.The?rst disseminates M.Mengoni(B)·M.Germani·M.Peruzzini Department of Mechanical Engineering, Polytechnic University of Marche, Via Brecce Bianche,60131Ancona,Italy e-mail:m.mengoni@univpm.it knowledge and innovative methods while the second pro-vides a practical background for general principles training. The main problem deals with the effort and time required to improve technical learning,while market competitiveness forces companies to demand young and high-quali?ed engi-neers in short time.Therefore,the entire educational process needs to be fast and ef?cient.Novel information technolo-gies(IT)and emerging virtual reality(VR)systems provide a possible answer to the above-mentioned questions.Some of the most important issues,in mechanical design?eld,are the investigation of such technologies potentialities and the evaluation of achievable bene?ts in terms of product design learning effectiveness and quality.While IT has been deeply explored in distance education,i.e.e-learning,VR still rep-resents a novelty. VR refers to an immersive environment that allows pow-erful visualization and direct manipulation of virtual objects. It is widely used for several engineering applications as it provides novel human computer interfaces to interact with digital mock-ups.The close connection between industry and education represents the starting point of this research. Instead of traditional teaching methods,virtual technolo-gies can simultaneously stimulate the senses of vision by providing stereoscopic imaging views and complex spatial effects,of touch,hearing and motion by respectively adopt-ing haptic,sound and motion devices.These can improve the learning process in respect with traditional teaching meth-ods and tools.The observation of students interpreting two-dimensional drawings highlighted several dif?culties:the impact evaluation of geometric and dimensional tolerances chains,the detection of functional and assembly errors,the recognition of right design solutions and the choice of the proper manufacturing operations.These limitations force tutors to seek for innovative technologies able to improve students’perception.
汽车起重机毕业设计文献综述
本科毕业设计(论文) 文献综述 文献综述题目:汽车起重机液压技术 学院:机电学院 专业:机械设计制造及其自动化 学生姓名:XXX 学号:1234567890 指导教师:XXX 完成时间: 2017年3月12日
汽车起重机液压技术 摘要:本文阐述了目前国内外汽车起重机的发展概况和发展趋势,汽车起重机液压系统,分析液压系统漏油问题。还例举了部分汽车起重机液压系统上应用的技术:负载敏感平衡阀在汽车起重机液压系统上的应用;顺序阀在汽车起重机液压系统上的应用;智能液压缸在汽车起重机液压系统上的应用;平衡回路在汽车起重机液压系统上的应用; 关键词:汽车起重机;液压系统;负载敏感平衡阀;顺序阀;平衡回路 1 国内汽车起重机的发展概况和发展趋势 1.1国内汽车起重机的发展概况 中国汽车起重机行业诞生于上世纪的60年代,经过了近50多年的发展,经过了从模仿到自主研发,从小载重量到大载重量的发展历程。在发展初期以引进国外先进技术为主,先后有三次重要技术引进,分别为70年代引进苏联的技术,80年代引进日本的技术,90年代引进德国的技术[1]。从99年以来,随经济建设新一轮启动,工程起重机市场竞争格局发生巨大变化,各企业不断调整思路、更新观念、转换机制、提高核心竞争力,努力开发产品,开拓市场。但是总体来说,中国的汽车起重机产业始终走着自主创新的道路,有着自己清晰的发展脉络,尤其是近几年,中国的汽车起重机产业取得了长足的发展,虽然与国外相比还有一定的差距,这些差距主要体现在起重臂及起重臂的伸缩技术、底盘技术、电液控制技术、结构的优化设计以及配套零部件落后等方面,但是这个差距正在逐渐的缩小[2]。 经过十几年的努力,国内起重机厂家取得了巨大进步。现在国内徐工、三一、中联重科等汽车起重机生产企业自主研发的部分产品已经处于国际领先水平,与国外著名的汽车起重机生产企业的差距越来越小[3]。 1.2国内汽车起重机的主要发展趋势 (1)扩大产品的品种。在企业内部应建立完善的产品研究和开发体系,使产品系
选题及研究意义、国内外状况、文献综述文档
选题及研究意义、国内外状况、文献综述文档 (一)选题地缘起和意义 引言 1.选题缘起 改革开放30多年以来,我国政府将大量地精力投入到如何更快地促进经济增长上,对就业难问题、收入分配不均问题以及社会保障体系、教育和医疗等体系不健全等问题地关注力度不够,政府职能地缺位、错位、越位现象严重.随着社会主义市场经济体制地发展和完善,尤其是国有经济结构地战略性调整和国有资产管理体制地改革,政府过去传统地管制型管理模式已经不能适应经济社会飞速发展地现实情况,迫切需要进行全面地政府体制改革,转变 出:“. 南) 等现象严重,以大量消耗自然资源为代价实现经济高速增长造成了大规模生态环境被破坏和环境污染,社会不稳定因素明显增加.社会发展与经济发展地这些严重失衡,说到底与政府制定地经济社会发展战略、不同时期地方针政策,与政府地管理方式、管理手段,与政府地宏观经济调控能力和公共行政管理能力,有着密切地、甚至决定性地关系④.要解决发展失衡问题,关键是进一步转变政府职能,明确政府地职能定位,合理界定政府管理经济地范围,切实把政府工作重点转变到提供基本公共产品和有效地公共服务上来,建设以公平、公正、社会经济和谐发展为目标地公共服务型政府.建设服务型政府是切实改进地方政府某些不良状态地迫切要求.由于长期以来政府一直停留在管制型政府地官本位、权力本位地理念之下,地方政府地“单边主义”和信用缺失现象比较严重.由此导致地政府官僚主义、衙门作风使得
政府与公众之间地关系渐行渐远.除此之外,地方政府在相当程度上出现了以发展经济、经营城市地名义进行圈地、兴建开发区,以公共利益地名义强行拆迁民房,以及拖欠农民工工资等现象.与此同时,相当一部分地方政府地政策缺少连续性,缺乏协调性和整体配套,让公众无所适从,“这些信号意味着在原有地制度路径下地改革所带来地额外收益地增加已接近临界值,不进行制度创新,就难以出现所谓地帕累托改进"@,就难以把中国地改革事业推向一个新地阶段,甚至政府地合法性也会遭到一定程度地挑战.另一方面,伴随着经济社会地全面转型,广人群众日益迫切地要求政府能够为他们提供基本而有保障地公共产品和有效地公共管理、公共服务;广人群众越来越期望建设一个公开、透明和没有腐败地政府. 2.研究意义 从实践方面讲,对我国目前服务型政府建设地现状与改进进行研究,有利于贯彻落实党地十 @,1.2 (--) 1 国外( 化地 企业家精神如何改革着公营部门》一书中阐述了企业家政府理论这一新公共管理地理想实践模式,主张政府在公共服务中地职能是“掌舵而不是划桨"①.治理理论成为改革公共服务地~个重要理论.治理理论地创始人是詹姆士·N·罗回[美]戴维·奥斯本,特德·盖布勒.改革政府——企业家精神如何改革着公营部门[M].周敦仁等译.上海:上海译文出版社,2006:1.3⑧\:一,硕士学位论文MASTER’S THESIS西瑙.他在《没有政府地治理》一书中提出全球治理地思想.奥斯特罗姆夫妇在《公共事物地治理之道》、《多中心与地方公共经济》等著作中提出多中心制度设计地理念.他们认为,高度地多中心与分化不会导致公共服务成本地提高.对此他们开 列了公共服务多种提供途径地清单:经营自己地生产单位、与私营公司签约外包、确立公共
机械设计文献综述最终版
1课题的背景和意义 扫描式三维形貌检测系统即为三坐标测量机,是经过40多年发展起来的一种高效率的新型精密测量仪器,有着非常广泛的用途。 20世纪60年代以来,工业生产有了很大的发展,特别是机床、机械、汽车、航空航天和电子工业兴起后,各种复杂零件的研制和生产需要先进的检测技术与仪器,因而体现三维测量技术的三坐标测量机应运而生,并迅速发展和日趋完善。作为近40年发展起来的一种高效率的新型精密测量仪器,三坐标测量机已广泛地用于机械制造、电子、汽车和航空航天等工业中。它可以进行零件和部件的尺寸、形状及相互位置的检测,例如箱体、导轨、涡轮和叶片、缸体、凸轮、齿轮、形体等空间型面的测量。此外,还可用于划线、定中心孔、光刻集成线路等,并可对连续曲面进行扫描及制备数控机床的加工程序等。由于它的通用性强、测量范围大、精度高、效率高、性能好、能与柔性制造系统相连接,已成为一类大型精密仪器,故有“测量中心”之称。 三坐标测量机主要由四大部分组成:主机机械系统(X、Y、Z三轴或其它)、测头系统、电气控制硬件系统、数据处理软件系统(测量软件)。 三坐标测量机的出现是标志计量仪器从古典的手动方式向现代化自动测试技术过渡的一个里程碑。三坐标测量机在下述方而对三维测量技术有重要作用: (1)解决了复杂形状表面轮廓尺寸的测量,例如箱体零件的孔径与孔位、叶片与齿轮、汽车与飞机等的外廓尺寸检测; (2)提高了三维测量的精度,目前高精度的坐标测量机的单轴精度,每米长度内可达1μm以内,三维空间精度可达1μm一2μm。对于车间检测用的三坐标测量机,每米测量精度单轴也可达3μm一4μm; (3)由于三坐标测量机可与数控机床和加工中心配套组成生产加工线或柔性制造系统,从而促进了自动化生产线的发展; (4)随着三坐标测量机的精度不断提高,自动化程度不断发展,促进了三维测量技术的进步,大大地提高了测量效率。尤其是电子计算机的引入,不但便于数据处理,而且可以完成CNC的控制功能,可缩短测量时间达95%以上。 2本课题相关技术的国内外发展概况 2.1三坐标测量机的发展历程 三坐标测量机是集机械、光学、控制技术、计算机技术为一体的大型的精密测量仪器,由于它的通用性强,测量范围大、精度高、效率高、性能好,因此自1959年
文献综述 完整版
文献综述 近十年白居易诗歌平淡美研究综述 一、国内外研究现状概述 近十年来关于白居易的研究也是古代文学研究领域的一大趋势。主要集中在白居易的诗歌研究、散文研究、思想研究、生存哲学研究等4个方面。据不完全统计,近十年来关于白居易研究的著作大致有陈友琴《白居易资料汇编》(中华书局,2005年再版)、付兴竹《白居易散文研究》(中国社会科学出版社,2007年版)、刘维,焦淑清《白居易传》(辽海出版社,2009年版)、蹇长春《白居易评传》(南京大学出版社,2011年版)等4部;研究论文达4500多篇,其中硕士学位论文余篇、博士学位论文余篇。研究领域得到很大的拓展,研究视角和方法更加多元化,研究观念也较为开放自觉。近十年来白居易研究主要的研究方向体现在白居易的诗歌研究、散文研究、思想研究、生存哲学研究等4个方面。 在白居易研究的多个方面上,成就较为突出地是关于诗歌的研究。据不完全统计,十年来关于白居易诗歌方面研究的著作有乔立智《白居易诗歌词汇研究》(北京人民出版社,2012年版)、付兴林,倪超《<长恨歌>及李扬题材唐诗研究》(中国社会科学出版社,2013年版)、张中宇《白居易<长恨歌>研究--中华文史新刊,2005年版》、胡奇光《中国古代语言艺术史》(上海人民出版社,2010年版)等4部;研究论文达200篇,其中硕士学位论文50余篇,博士学位论文达4篇。涉及的研究范围很广泛,在研究视角与方法上呈现多样性,在观念上也比先前更为开放自觉。近十年来白居易诗歌研究的主要内容多体现在诗歌对后世文学的影响研究、诗歌语言词汇研究、诗歌意象研究、诗歌对外翻译研究、审美研究等5个方面。在不同程度上,都取得了相应的成果,50多篇硕博学位论文对白居易诗歌的相对应之处都进行了深入的探讨研究,整体上对全面了解白居易及其诗歌做出了较大贡献,对白居易集的
起重机文献综述
毕业设计(论文)文献综述题目: 集装箱起重机方案设计
起重机起升机构电气设计与轴套数控加工文献综述 【摘要】:在日常生活和大量施工中,起重机的作用不可小视。下面就了解一下起重机几个方面的情况。 【关键词】:起重机;变频器;大车;小车 概述 起重机械是一种对重物能同时完成垂直升降和水平移动的机械。在工业和民用建筑工程中,起重机械作为主要施工机械用于建筑构件和材料在运输过程的装卸,并将构件吊到设计位置进行安装等,不仅解决了人力无法胜任的作业,而且能保证工程质量,缩短工期,降低成本,成为极其重要的建筑施工机械。 起重机械的分类: 起重机械的种类很多,按使用的动力设备可分为内燃机作动力和电动机作动力两种;按起重机载荷率可分为轻型、中型、重型、特重型四类;按起重结构可分为龙门式和臂架式两类;按回转台的角度可分为全回转式和非全回转式;按行走机构的构造可分为固定式和移动式两类。建筑施工中常用的为移动式起重机,包括:塔式起重机、汽车式起重机、轮胎式起重机、履带式起重机,以及最基本的起重机械-----卷扬机。随着高层建筑中作为垂直运输机械而迅速发展的施工升降机也已纳入起重机械范围。 起重机械的主要性能参数包括:起重量、工作幅度、起重力矩、起升高度以及工作速度等。 一、起重量 起重量是指起重机能吊起重物的质量,其中应包括吊索和铁扁担或容器的质量,它是衡量起重机工作能力的一个重要参数。通常称为额定起重量,用“Q”表示。起重量的单位过去惯用“t”表示,现都用“KN”表示(10KN约等于It)。起重机随着工作幅度的变化,其起重量也随之变化。因此,额定起重量有最大起重量和最大幅度起重量之分。最大起重量是指基本起重臂处于最小幅度时所允许起吊的最大起重量;最大幅度起重量是指基本起重臂处于最大幅度时所允许起吊的最大起重量。一般起重机的额定起重量是指基本起重臂处于最小幅度时允许起吊的最大起重量,也就是起重机铭牌上标定的起重量。 二、工作幅度 工作幅度是指在额定起重量下,起重机回转中心轴线到吊钩中心线的水平距离,通常称
文献综述的写法及实例
文献综述的写法 一、什么是文献综述 文献综述是在确定了选题后,在对选题所涉及的研究领域的文献进行广泛阅读和理解的基础上,对该研究领域的研究现状(包括主要学术观点、前人研究成果和研究水平、争论焦点、存在的问题及可能的原因等)、新水平、新动态、新技术和新发现、发展前景等内容进行综合分析、归纳整理和评论,并提出自己的见解和研究思路而写成的一种不同于毕业论文的文体。它要求作者既要对所查阅资料的主要观点进行综合整理、陈述,还要根据自己的理解和认识,对综合整理后的文献进行比较专门的、全面的、深入的、系统的论述和相应的评价,而不仅仅是相关领域学术研究的“堆砌”。 需要说明的是,如果别的学者已经很完美地解决了你提出的问题,那就没有重复研究的必要了。 二、撰写文献综述的好处 要求同学们学写文献综述,至少有以下好处: 1.通过搜集文献资料过程,可进一步熟悉科学文献的查找方法和资料的积累方法;在查找的过程中同时也扩大了知识面; 2.查找文献资料、写文献综述是科研选题及进行科研的第一步,因此学习文献综述的撰写也是为今后科研活动打基础的过程; 3.通过文献综述的写作,有利于提高归纳、分析、综合能力,有利于提高独立工作能力和科研能力; 4.毕业设计(论文)的文献综述,要结合课题的性质进行撰写。 三、文献综述的结构 文献综述要求介绍与主题有关的详细资料、动态、进展、展望以及对以上方面的评述,一般都包含以下四部分:即前言、主题、总结和参考文献。撰写文献综述时可按这四部分拟写提纲,再根据提纲进行撰写工作。 前言部分,主要是说明写作的目的,介绍有关的概念及定义以及综述的范围,扼要说明有关主题的现状或争论焦点,使读者对全文要叙述的问题有一个初步的轮廓。 主题部分,是综述的主体,其写法多样,没有固定的格式。可按
工业机器人文献综述
工业机器人文献综述 生产力在不断进步,推动养科技的进步与革新,以建立更加合理 的生产关系。自工业革命以来,人力劳动己经逐渐被机械所取代,而这种变革为人类社会创造出巨大的财富,极大地推动了人类社会的进步时至今天,机电一体化,机械智能化等技术应运而生并己经成为时代的主旋律。 1.工业机器人的发展: 1.1 机器人概念的诞生 机器人技术一词虽然出现的较晚,但这一概念在人类的想象中却早已出现。自古以来,有不少科学家和杰出工匠都曾制造出具有人类特点或具有动物特征的机器人雏形。我国西周时期的能工巧匠就研制出了能歌善舞的伶人,这是我国最早的涉及机器人概念的文章记录,此外春秋后期鲁班制造过一只木鸟,能在空中飞行,体现了我国劳动人民的智慧。机器人一词由捷克作家--卡雷尔.恰佩克在他的讽刺剧《罗莎姆的万能机器人》中首次提出,剧中描述了一机器奴仆Robot。此次Robot被沿用下来,中文译成机器人。1942年美国科幻作家埃萨克.阿西莫夫在他的科幻小说《我.机器人》中提出了“机器人三大定律”,这三大定律后来成为学术界默认的研发原则。现代机器人出现于20世纪中期,当计算机技术出现,电子技术的进步,数控机床的出现及与机器人相关的控制技术和零件加工技术的成熟,为现代机器人的发展打下了基础。 1.2 国内机器人的发展史 在我国目前采用工业机器人的行业主要有汽车行业、摩托车、电 器、工程机械、石油化工等行业。我国作为亚洲第三大的工业机器人需求国,对于工业机器人的需求量在逐年增加,从而吸引了大批工业机器人的制造商,加快了我国工业机器人技术的发展第一阶段是20世纪80年代,我国为t跟踪国际机器人技术的道路,当时以原机械工业部为主,航天工业部等部门联合组织国内的相关研究单位开展了工业机器人的研究,先后推出了弧焊、点焊、喷漆等多种工业机器人。直到90年代,通过国家863计划等的K77,我国具备t独!)设计不}}生产工业机器人的能力,培养了一批高水平的研究生产队伍进入21世纪,中国的工业机器人发展进入t一个崭新的阶段,其中最大的特点是以企业为主体,以市场为导向、赢利为目标的机器人产业开发群体止在形成。尽管国外大的工业机器人公司为了占领中国不断扩大的市场,加大了其在中国的经销力度,但是中国的机器人企业以自己独有的市场信息优势、售前售后的服}}c势、针对中国企业的工艺特点的专门化设计优势努力争取自己的市场地位随养全球经济的一体化发展,世界制造中心向中国转移的趋势,中国工业机器人的产业会快速的发展起来,特别重要的是研制单位必须和需求紧密结合,让机器人走进工厂,实现真止的产业化。 经过20多年的探索,我国的工业机器人自动化技术取得t长足的发展,但是与世界发达国家相比,还有不小的差距;机器人应用工程起步也较晚,应用领域窄,生产线系统技术落后随养我国制造业-尤其是汽车行业的发展,对工业机器人的需求日益增长,工业机器人的拥有量远远不能满足需求量。尤其是基础零部件和元器件生产和制造、机器人可靠性以及成木等问题,都存在很多问题。尤其在大负载工业机器人方而,不仅产品长期大量依靠从国外引进,在维护、更新改造方而对国外的依赖也相当严重。 1.3国内外工业机器人的发展方向
研究论文文献综述的写法详细介绍
一、何谓文献综述? 文献综述是对某一学科、专业或专题的大量文献进行整理筛选、分析研究和综合提炼而成的一种学术论文,是高度浓缩的文献产品。根据其涉及的内容范围不同,综述可分为综合性综述和专题性综述两种类型。所谓综合性综述是以一个学科或专业为对象,而专题性综述则是以一个论题为对象的。学生毕业论文主要为专题性综述。 文献综述反映当前某一领域中某分支学科或重要专题的历史现状、最新进展、学术见解和建议,它往往能反映出有关问题的新动态、新趋势、新水平、新原理和新技术等等。文献综述是针对某一研究领域分析和描述前人已经做了哪些工作,进展到何程度,要求对国内外相关研究的动态、前沿性问题做出较详细的综述,并提供参考文献。作者一般不在其中发表个人见解和建议,也不做任何评论,只是客观概括地反映事实。 二、文献综述的特点 1.综合性:综述要"纵横交错",既要以某一专题的发展为纵线,反映当前课题的进展;又要从本单位、省内、国内到国外,进行横的比较。只有如此,文章才会占有大量素材,经过综合分析、归纳整理、消化鉴别,使材料更精练、更明确、更有层次和更有逻辑,进而把握本专题发展规律和预测发展趋势。 2.评述性:是指比较专门地、全面地、深入地、系统地论述某一方面的问题,对所综述的内容进行综合、分析、评价,反映作者的观点和见解,并与综述的内容构成整体。一般来说,综述应有作者的观点,否则就不成为综述,而是手册或讲座了。 3.先进性:综述不是写学科发展的历史,而是要搜集最新资料,获取最新内容,将最新的信息和科研动向及时传递给读者。 4.综述不应是材料的罗列,而是对亲自阅读和收集的材料,加以归纳、总结,做出评论和估价。并由提供的文献资料引出重要结论。一篇好的综述,应当是既有观点,又有事实,有骨又有肉的好文章。由于综述是三次文献,不同于原始论文(一次文献),所以在引用材料方面,也可包括作者自己的实验结果、未发表或待发表的新成果。 5.综述的内容和形式灵活多样,无严格的规定,篇幅大小不一,大的可以是几十万字甚至上百万字的专著,参考文献可数百篇乃至数千篇;小的可仅有千余字,参考文献数篇。一般医学期刊登载的多为3000~4000字,引文15~20篇,一般不超过20篇,外文参考文献不应少于1/3。 三、综述的内容要求 6.选题要新:即所综述的选题必须是近期该刊未曾刊载过的。一片综述文章,若与已发表的综述文章"撞车",即选题与内容基本一致,同一种期刊是不可能刊用的。 7.说理要明:说理必须占有充分的资料,处处以事实为依据,决不能异想天开地臆造数据和诊断,将自己的推测作为结论写。 8.层次要清:这就要求作者在写作时思路要清,先写什么,后写什么,写到什么程度,前后如何呼应,都要有一个统一的构思。
文献综述---L型支腿门式起重机大车行走机构设计
本科毕业设计(论文)文献综述 课题名称: L型支腿门式 起重机大车行走机构设计 学院(系):机械学院 年级专业: 07级工程机械
一、课题国内外现状 1.1门式起重机概述[1] 门式起重机是一种循环、间歇运动的机械。它具有构造简单、操作灵活、维修方便、起重量和跨度大及占用作业面积小的特点。广泛用于铁路货场、港口码头、现代化工厂和仓库等场所。门式起重机一般由金属结构部分、机械部分和电气部分组成。它的金属结构像门形框架,承载主梁下安装两条支脚,可以直接在地面的轨道上行走,主梁两端可以具有外伸悬臂梁。门式起重机的金属结构部分主要由主梁、支腿、下端梁和司机室组成。它一般沿着铺设在地面上的轨道上运行。机械机构主要由起升机构和运行机构组成。电气部分由电气设备和电气线路组成。 门式起重机的形式很多,根据用途的不同可以分为通用型门式起重机,集装箱门式起重机,电站门式起重机,造船门式起重机等。 1)普通龙门起重机 这种起重机多采用箱型式和桁架式结构,用途最广泛。可以搬运各种成件物品和散状物料,起重量在100吨以下,跨度为4~39米。用抓斗的普通门式起重机工作级别较高。普通门式起重机主要是指吊钩、抓斗、电磁、葫芦门式起重机,同时也包括半门式起重机。 2)水电站龙门起重机
主要用来吊运和启闭闸门,也可进行安装作业。起重量达80~500吨,跨度较小,为8~16米;起升速度较低,为1~5米/分。这种起重机虽然不是经常吊运,但一旦使用工作却十分繁重,因此要适当提高工作级别。3)造船龙门起重机 用于船台拼装船体,常备有两台起重小车:一台有两个主钩,在桥架上翼缘的轨道上运行;另一台有一个主钩和一个副钩,在桥架下翼缘的轨道上运行,以便翻转和吊装大型的船体分段。起重量一般为100~1500吨;跨度达185米;起升速度为2~15米/分,还有0.1~0.5米/分的微动速度。4)集装箱龙门起重机 用于集装箱码头。拖挂车将岸壁集装箱运载桥从船上卸下的集装箱运到堆场或后方后,由集装箱龙门起重机堆码起来或直接装车运走,一般用轮胎式。这种起重机的工作级别较高。起升速度为8~10米/分;跨度根据需要跨越的集装箱排数来决定,最大为60米左右。 按照结构形式分为: 1)单主梁门式起重机 单主梁门式起重机结构简单,制造安装方便,自身质量小,主梁多为偏轨箱形架结构。整体刚度要弱一些,起重量Q≤50t、跨度S≤35m。门腿有L型和C型两种形式。 2)双梁桥式起重机 双梁桥式起重机承载能力强,跨度大、整体稳定性好,品种多,但自身质量与相同起重量的单主梁门式起重机相比要大些,造价也较高。 1.2国内 我国的门式起重机发展自从上世纪五十年代中期开始经历了仿制、改进和自主研发三个阶段。2011年由武桥重工制造的我国最大的一台龙门起重机该起重机跨度为230米,为国内最大跨度,标准载重为900吨,实际载重可以达到1500吨。在结构设计、材料、装置等方面都实现了跨越式的发展,基本上确立了研发,制造体系。 随着我国基本建设高峰的逐渐到来,造船、风力发电安装、石油化工(包括煤化工)建设、冶金建设、火电(包括核电)建设、市政等等的发展使大型起重机吊装市场出现供不应求的“火暴”现象。如今,我国的建设工程中的大
高血压的研究概况-文献综述
国内外高血压病的研究概况 摘要:高血压是一种以动脉压升高为特征,可伴有心脏、血管、脑和肾脏等器官功能性或器质性改变的全身性疾病。高血压分为原发性高血压和继发性高血压。导致高血压发病的原因有多种,总体可以分为遗传和环境两个方面。由于部分高血压患者并无明显的临床症状,高血压又被称为人类健康的无形杀手。因此提高对高血压病的认识,对早期预防、及时治疗有极其重要的意义。对此国内外医学专家对高血压病的分类、病因、治疗以及预防进行了详尽的分析。 关键词:高血压、继发性高血压、原发性高血压 1、高血压病的概况 学者项氏[1]定义高血压病是指在静息状态下动脉收缩压和/或舒张压增高(>=140/90mmHg),常伴有脂肪和糖代谢紊乱以及心、脑、肾和视网膜等器官功能性或器质性改变。在未用抗高血压药情况下,收缩压≥139mmHg和/或舒张压≥89mmHg,按血压水平将高血压分为1,2,3级。收缩压≥140mmHg和舒张压<90mmHg单列为单纯性收缩期高血压。患者既往有高血压史,目前正在用抗高血压药,血压虽然低于140/90mmHg,亦应该诊断为高血压。按照世界卫生组织(WHO)建议使用的血压标准是:凡正常成人收缩压应小于或等于140mmHg(18.6kPa),舒张压小于或等于90mmHg(12kPa)。亦即收缩压141-159mmHg(18.9-21.2kPa)之间,舒张压在91-94mmHg(12.1-12.5kPa)之间,为临界高血压。 对于高血压的概况,学者邓氏[2]说道,高血压病即原发性高血压或简称高血压,是常见的一种心血管疾病。这个疾病的发病原因比较复杂,影响因素也比较多,如增龄就是一个明显的相关因素,随着年龄的增长,患病率也逐渐增加。这种随着年龄增长而发生的高血压,我们习惯性地称之为老年高血压。由于老年人的特点,促发的因素更加复杂。一部分老年高血压是由老年前期(45~59岁)或更早发生的高血压延续至老年期。一部分是由于老年人器官的老化,调节功能下降,血管硬化和粥样硬化,更易促使血管的弹性减退,心脏搏血时的外周阻力增加,产生压力负荷型的血压增高。另一方面老年人的精神状态易受环境的影响而表现不稳定。如离退休后工作环境的改变,体力减退、丧偶或子女赡养等家庭因素的变化,都会引起精神的不安。
机械手文献综述汇总
燕山大学 本科毕业设计(论文)文献综述 课题名称:顺序动作机械手 学院(系):机械工程学院 年级专业:机电控制 学生姓名:杨忠合 指导教师:郑晓军 完成日期: 2014.03.25
一、课题国内外现状 目前国内机械于主要用于机床加工、铸锻、热处理等方面,数量、品种、性能方面都不能满足工业生产发展的需要。所以,在国内主要是逐步扩大应用范围,重点发展铸造、热处理方面的机械手,以减轻劳动强度,改善作业条件,在应用专用机械手的同时,相应的发展通用机械手,有条件的还要研制示教式机械手、计算机控制机械手和组合机械手等。同时要提高速度,减少冲击,正确定位,以便更好的发挥机械手的作用。此外还应大力研究伺服型、记忆再现型,以及具有触觉、视觉等性能的机械手,并考虑与计算机连用,逐步成为整个机械制造系统中的一个基本单元。 国外机械手在机械制造行业中应用较多,发展也很快。目前主要用于机床、横锻压力机的上下料,以及点焊、喷漆等作业,它可按照事先指定的作业程序来完成规定的操作。国外机械手的发展趋势是大力研制具有某种智能的机械手。使它具有一定的传感能力,能反馈外界条件的变化,作相应的变更。如位置发生稍许偏差时,即能更正并自行检测,重点是研究视觉功能和触觉功能。目前已经取得一定成绩。目前世界高端工业机械手均有高精化,高速化,多轴化,轻量化的发展趋势。定位精度可以满足微米及亚微米级要求,运行速度可以达到3M/S,量新产品达到6轴,负载2KG的产品系统总重已突破100KG。更重要的是将机械手、柔性制造系统和柔性制造单元相结合,从而根本改变目前机械制造系统的人工操作状态。同时,随着机械手的小型化和微型化,其应用领域将会突破传统的机械领域,而向着电子信息、生物技术、生命科学及航空航天等高端行业发展。 二、研究主要成果 机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。 搬运机械手仿真设计和制作,机械手的机械结构主要包括由两个电磁阀控制的气缸来实现机械手的上升下降运动及夹紧工件的动作,两个转速不同的电动机分别通过两线圈控制电动机的正反转,从而实现小车的进退运动,并利用ADAMS 软件对搬运机械手进行建模,对其进行运动学及动力学仿真,
3T单钩移动电动葫芦起重机设计【开题报告】
开题报告 机械设计制造及其自动化 3T单钩移动电动葫芦起重机设计 一、综述本课题国内外研究动态,说明选题的依据和意义 中国古代灌溉农田用的桔就是臂架型起重机的雏形。14世纪,西欧出现了人力和畜力驱动的转动臂架型起重机。19世纪前期,出现了桥式起重机;起重机的重要磨损件如轴、齿轮和吊具等开始采用金属材料制造,并开始采用水力驱动。19世纪后期,蒸汽驱动的起重机逐渐取代了水力驱动的起重机。20世纪20年代开始,由于电气工业和内燃机工业迅速发展,以电动机或内燃机为动力装置的各种起重机基本形成。 电动葫芦是起重设备的主要型号之一。它主要由减速器,运行机构,卷筒装置,吊钩装置,联轴器,限位器,锥形转子电动机等部分组成。随着世界经济及工业技术的不断发展,特别是电动葫芦及其驱动装置“三合一” (电动机、减速器、制动器三合为一)部件的技术发展,以电动葫芦为起升机构的葫芦式起重机,以其高度的标准化、系列化和通用化程度为前提,在世界主要工业发达国家不断更新发展。 “葫双”小车中小车是由电动葫芦、车轮及支承架组成。带“三台一”运行组为主动部分,“三合一”运行组中,减速器为全封闭轴装型,硬齿面磨削而成,锥形转子鼠笼电机可变极1:4速比,全部带锥盘制动器,车轮由高强度球墨铸铁制成.具有接触强度好,耐磨等优点。配置副钩需要和司机室操纵时,起重机运行速度高,小车上电动葫芦与主梁成垂直布置形式,以减少载荷的摆动。 起重机制造厂家要按用户的要求承担特殊的设计,即包括起重机的所有部件和起升高度、所必须移动物料的距离等,在厂房建好前,就必须将厂房建筑蓝图或厂房的主要尺寸提供给起重机制造厂家,设计者按用户的要求,设计起重机的外形及确定其主要参数,用户确认后,才开始设计制造。从这个过程,国内起重机制造厂与国外工业发达国家有很多相似之处。但目前国内起重机行业存在的问题已严重阻碍着自身的发展。 本文根据设计任务书要求,主要对3t单钩移动电动葫芦的总体方案选择和确定,然后对传动系统进行设计。根据设计要求和目的,参考CD型电动葫芦对首先对3t单钩移动电动葫芦进行工艺分析,选择合理机构及装配方案,然后对减速器和电动机进行外