弹簧阻尼系统动力学模型adams仿真设计
震源车系统动力学模型分析报告
一、项目要求
1)独立完成1个应用Adams 软件进行机械系统静力、运动、动力学分析问题,并完成一份分析报告。分析报告中要对所计算的问题和建模过程做简要分析,以图表形式分析计算结果。
2)上交分析报告和Adams 的命令文件,命令文件要求清楚、简洁。
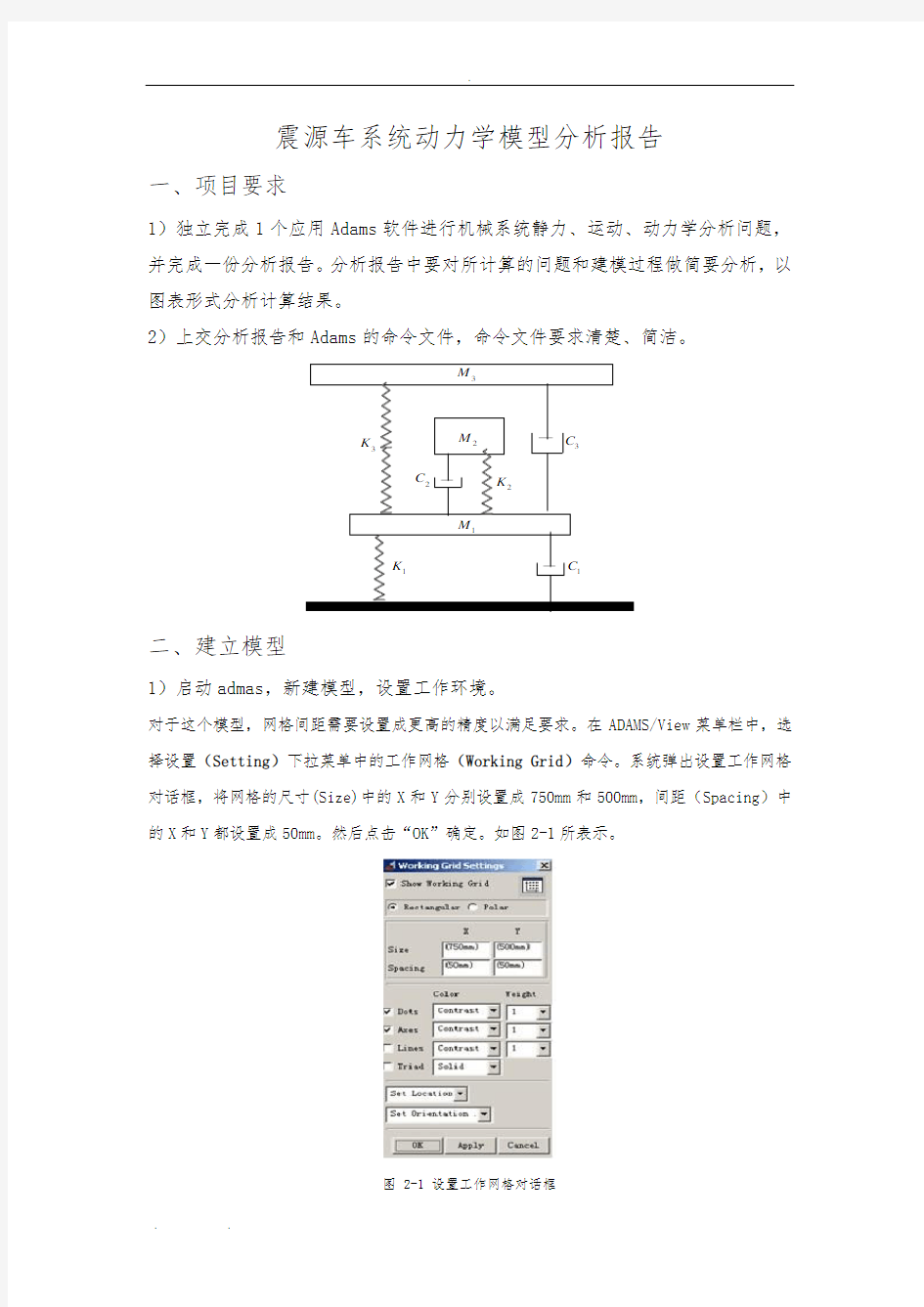
1K 1
C 2K 2C 3
C 3
K 3
M 1
M 2M
二、建立模型
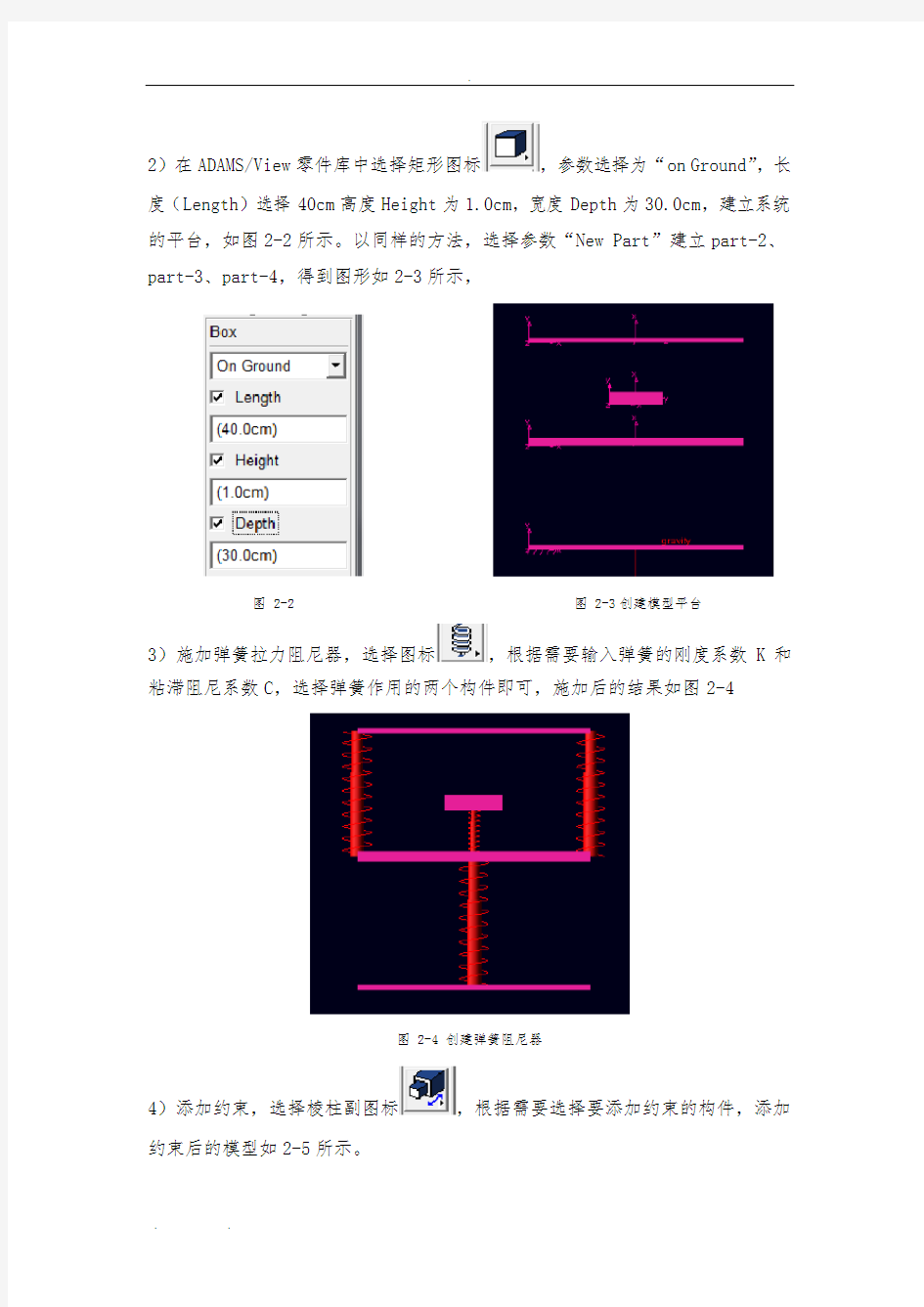
1)启动admas ,新建模型,设置工作环境。
对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。然后点击“OK ”确定。如图2-1所表示。
图 2-1 设置工作网格对话框
2)在ADAMS/View零件库中选择矩形图标,参数选择为“on Ground”,长度(Length)选择40cm高度Height为1.0cm,宽度Depth为30.0cm,建立系统的平台,如图2-2所示。以同样的方法,选择参数“New Part”建立part-2、part-3、part-4,得到图形如2-3所示,
图 2-2 图 2-3创建模型平台
3)施加弹簧拉力阻尼器,选择图标,根据需要输入弹簧的刚度系数K和粘滞阻尼系数C,选择弹簧作用的两个构件即可,施加后的结果如图2-4
图 2-4 创建弹簧阻尼器
4)添加约束,选择棱柱副图标,根据需要选择要添加约束的构件,添加约束后的模型如2-5所示。
图2-5 添加约束
至此模型创建完成
三、模型仿真
1)、在无阻尼状态下,系统仅受重力作用自由振动,将最下层弹簧的刚度系数K设置为10,上层两个弹簧刚度系数均设置为3,小物块的支撑弹簧的刚度系数为4,阻尼均为0,进行仿真,点击图标,设置End Time为5.0,Step Size 为0.01,Steps为50,点击图标,开始仿真对所得数据进行分析。
选择物块的位移、速度、加速度与时间的图像如图3-1、3-2、3-3所示,经过傅里叶变换之后我们可以清楚地看到系统的各阶固有频率。
图3-1位移与时间图像以及FFT变换图像
图3-2速度与时间图像以及FFT变换图像
图3-3加速度与时间图像以及FFT变换图像
通过傅里叶变换,从图中可以看出系统为三阶系统,表现出三阶的固有频率,通过测量得到w1=2.72,w2=4.29,w3=6.15.。
2)为了更进一步验证系统的各阶固有频率,我们给系统施加一定频率的正弦激振力,使系统做受迫振动,观察系统的振动情况,
(a)F1=50*sin(2*3.14*w1*time)时,物块振动的速度与时间的图像如3-4所示。
图3-4 F1作用下速度与时间图像以及FFT变换图像
在F1的作用下,此时振动的幅值A1=489.6323,由于激振力的频率等于系统一阶固有频率,系统在一阶固有频率处发生共振,与无阻尼状态下自由振动时物块振动速度(3-2)相比较,振动明显加强,
(b)F2=50*sin(2*3.14*w2*time)时,物块振动的速度与时间的图像如3-5所示。
图3-5 F2作用下速度与时间图像以及FFT变换图像
在F2的作用下,此时系统在W2的幅值A2=304.0115,由于激振力的频率等于系统二阶固有频率,系统在二阶固有频率处发生共振,振动明显加强,(c)F3=50*sin(2*3.14*w3*time)时,物块振动的速度与时间的图像如3-6所示。
图3-6 F3作用下速度与时间图像以及FFT变换图像
在F3的作用下,由于激振力的频率等于系统三阶固有频率,系统在三阶固有频率处发生共振,与自由振动相比较振动明显加强,
(d) F4=50*sin(2*3.14*w3*time)时物块振动的速度与时间的图像如3-7所示
图3-7 F4作用下速度与时间图像以及FFT变换图像
当激振力的频率与系统固有频率相差很远时,系统不会发生共振现象,在系统的各阶固有频率处振动都不会加强。
阻尼振动与受迫振动 实验报告
《阻尼振动与受迫振动》实验报告 一、实验目的 1. 观测阻尼振动,学习测量振动系统基本参数的方法; 2. 研究受迫振动的幅频特性和相频特性,观察共振现象; 3. 观测不同阻尼对受迫振动的影响。 二、实验原理 1. 有粘滞阻尼的阻尼振动 弹簧和摆轮组成一振动系统,设摆轮转动惯量为J ,粘滞阻尼的阻尼力矩大小定义为角速度d θ/dt 与阻尼力矩系数γ的乘积,弹簧劲度系数为k ,弹簧的反抗力矩为-k θ。忽略弹簧的等效转动惯量,可得转角θ的运动方程为 220d d J k dt dt θθγθ++= 记ω0为无阻尼时自由振动的固有角频率,其值为ω0=k/J ,定义阻尼系数β =γ/(2J ),则上式可以化为: 2220d d k dt dt θθ βθ++= 小阻尼即22 00βω-<时,阻尼振动运动方程的解为 ( )) exp()cos i i t t θθβφ=-+ (*) 由上式可知, 阻尼振动角频率为d ω=阻尼振动周期为2d d T π ω= 2. 周期外力矩作用下受迫振动的解 在周期外力矩Mcos ωt 激励下的运动方程和方程的通解分别为 22cos d d J k M t dt dt θθγθω++= ()( )) ()exp cos cos i i m t t t θθβφθωφ=-++- 这可以看作是状态(*)式的阻尼振动和频率同激励源频率的简谐振动的叠加。 一般t >>τ后,就有稳态解 ()()cos m t t θθωφ=- 稳态解的振幅和相位差分别为 m θ=
22 02arctan βω φωω =- 其中,φ的取值范围为(0,π),反映摆轮振动总是滞后于激励源支座的振动。 3. 电机运动时的受迫振动运动方程和解 弹簧支座的偏转角的一阶近似式可以写成 ()cos m t t ααω= 式中α m 是摇杆摆幅。由于弹簧的支座在运动,运动支座是激励源。弹簧总转 角为()cos m t t θαθαω-=-。于是在固定坐标系中摆轮转角θ的运动方程为 ()22cos 0m d d J k t dt dt θθγθαω++-= 也可以写成 22cos m d d J k k t dt dt θθγθαω++= 于是得到 2 m θ= 由θ m 的极大值条件0m θω? ?=可知,当外激励角频率ω=系统发生共振, θ m 有极大值 α 引入参数(0ζβωγ==,称为阻尼比。 于是,我们得到 m θ= ()() 02 02arctan 1ζωωφωω=- 三、实验任务和步骤 1. 调整仪器使波耳共振仪处于工作状态。 2. 测量最小阻尼时的阻尼比δ和固有角频率ω0。 3. 测量阻尼为3和5时的振幅,并求δ。 4. 测定受迫振动的幅频特性和相频特性曲线。 四、实验步骤。
21ADAMS柔性体-刚柔耦合模块详解
ADAMS柔性体-刚柔耦合模块 一、ADAMS柔性体理论 1、ADAMS研究体系: a)刚体多体系统(低速运动) b)柔性多体系统(考虑弹性变形,大轻薄,高速) c)刚柔耦合多体系统(根据各个构件情况考虑,常用普遍仿真类型) 大部分仿真分析都采用的是刚性构件,在受到力的作用不会产生变形,现实中把大部分构件当做刚性体处理是可以满足要求的,因为各个零件之间的弹性变形对于机构各部分的动态特性影响微乎其微。 但是需要考虑构件变形,变形会影响精度结果,需要对构件其应力大小和分布以及载荷输出研究的时候,以及薄壁构件,高精密仪器部件等,则需要当做柔性体对待,这样计算结果会准确一些。对于柔性体机构,变形对动态影响起着决定性作用,刚柔耦合系统约束的添加必须考虑各个零部件之间的连接和受力关系,更可能还原实际工况,从而使模型更真实还原。 2、柔性体 柔性体是由模态构成的,要得到柔性体就需要计算构件的模态。柔性体最重要的假设就是仅考虑了相对于连体坐标系得晓得线性变形,而连体坐标系同时也在做大的非线性运动。 对于柔性体变形,模态中性文件必然存在某一些模态不响应,没有参与变形或者变性太大,参与系数非常小,比如前六阶或者不正常的阶数,如果去掉贡献较小的模态阶数,便可以提高仿真的效率。 ………… 3、模态 谈到柔性体,就必然脱不了模态的概念,构件的模态是构件自身的一个物理属性,一个构件一旦制造出来,他的模态就是自身的一种属性,再将几何模型离散成有限元模型以后,有限元模型的各个节点有一定的自由度,这样所有的节点自由度的和就构成了有限元模型的自由度,一个有限元模型有多少自由度,它就有多少阶模态。由于构件各个节点的实际位移是模态的按一定比例的线性叠加,这个比例就是一个系数,通常成为模态参与因子,参与因子越大,对应的模态对于构件变形的贡献量越多,因此对构件的振动分析,可以从构件的模态参与因子大小来分析,如果构建在振动时,某阶模态的参与因子大,可以通过改进设计,抑制改接模态对振动贡献量,可以明显降低构件的振动。 利用有限元技术,通过计算构件的自然频率和对应的模态,按照模态理论,将构件产生的变形看作是由构件模态通过线性计算得到的。在计算构建模态时,按照有限元理论,首先要将构件离散成一定数量的单元,单元数量越多,计算精度越高,单元之间通过共用一个节点来转递力的作用,在一个单元上的两个点之间可以产生相对位移,再通过单元的材料属性,进一步计算出构建的内应力和应变。 …………柔性体模态与有限元模态区别不同? …………约束模态? …………正交模态? ADAMS中建立柔性体的三种方法:离散柔性连接杆、ADAMS/ViewFlex模块生成mnf文件、FEA有限元软件输出mnf文件 二、离散柔性连接杆 1、定义:将一个构件离散成几段或者许多段小刚性构件,每个小刚性构件之间通过柔性梁连接,变形
系统动力学模型部分集
第10章系统动力学模型 系统动力学模型(System Dynamic)是社会、经济、规划、军事等许多领域进行战略研究的重要工具,如同物理实验室、化学实验室一样,也被称之为战略研究实验室,自从问世以来,可以说是硕果累累。 1 系统动力学概述 2 系统动力学的基础知识 3 系统动力学模型 第1节系统动力学概述 1.1 概念 系统动力学是一门分析研究复杂反馈系统动态行为的系统科学方法,它是系统科学的一个分支,也是一门沟通自然科学和社会科学领域的横向学科,实质上就是分析研究复杂反馈大系统的计算仿真方法。 系统动力学模型是指以系统动力学的理论与方法为指导,建立用以研究复杂地理系统动态行为的计算机仿真模型体系,其主要含义如下: 1 系统动力学模型的理论基础是系统动力学的理论和方法; 2 系统动力学模型的研究对象是复杂反馈大系统; 3 系统动力学模型的研究内容是社会经济系统发展的战略与决策问题,故称之为计算机仿真法的“战略与策略实验室”; 4 系统动力学模型的研究方法是计算机仿真实验法,但要有计算
机仿真语言DYNAMIC的支持,如:PD PLUS,VENSIM等的支持; 5 系统动力学模型的关键任务是建立系统动力学模型体系; 6 系统动力学模型的最终目的是社会经济系统中的战略与策略决策问题计算机仿真实验结果,即坐标图象和二维报表; 系统动力学模型建立的一般步骤是:明确问题,绘制因果关系图,绘制系统动力学模型流图,建立系统动力学模型,仿真实验,检验或修改模型或参数,战略分析与决策。 地理系统也是一个复杂的动态系统,因此,许多地理学者认为应用系统动力学进行地理研究将有极大潜力,并积极开展了区域发展,城市发展,环境规划等方面的推广应用工作,因此,各类地理系统动力学模型即应运而生。 1.2 发展概况 系统动力学是在20世纪50年代末由美国麻省理工学院史隆管理学院教授福雷斯特(JAY.W.FORRESTER)提出来的。目前,风靡全世界,成为社会科学重要实验手段,它已广泛应用于社会经济管理科技和生态灯各个领域。福雷斯特教授及其助手运用系统动力学方法对全球问题,城市发展,企业管理等领域进行了卓有成效的研究,接连发表了《工业动力学》,《城市动力学》,《世界动力学》,《增长的极限》等著作,引起了世界各国政府和科学家的普遍关注。 在我国关于系统动力学方面的研究始于1980年,后来,陆续做了大量的工作,主要表现如下: 1)人才培养
弹簧阻尼系统动力学模型ams仿真
弹簧阻尼系统动力学模 型a m s仿真 集团文件发布号:(9816-UATWW-MWUB-WUNN-INNUL-DQQTY-
震源车系统动力学模型分析报告一、项目要求 1)独立完成1个应用Adams软件进行机械系统静力、运动、动力学分析问题,并完成一份分析报告。分析报告中要对所计算的问题和建模过程做简要分析,以图表形式分析计算结果。 2)上交分析报告和Adams的命令文件,命令文件要求清楚、简洁。 二、建立模型 1)启动admas,新建模型,设置工作环境。 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View菜单栏中,选择设置(Setting)下拉菜单中的工作网格(WorkingGrid)命令。系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X和Y分别设置成750mm和500mm,间距(Spacing)中的X和Y都设置成50mm。然后点击“OK”确定。如图2-1所表示。 图2-1设置工作网格对话框 2)在ADAMS/View零件库中选择矩形图标,参数选择为“onGround”,长度(Length)选择40cm高度Height为1.0cm,宽度Depth为30.0cm,建立系统的平台,如图2-2所示。以同样的方法,选择参数“NewPart”建立part-2、part-3、part-4,得到图形如2-3所示, 图2-2图2-3创建模型平台 3)施加弹簧拉力阻尼器,选择图标,根据需要输入弹簧的刚度系数K和粘滞阻尼系数C,选择弹簧作用的两个构件即可,施加后的结果如图2-4 图2-4创建弹簧阻尼器
4)添加约束,选择棱柱副图标,根据需要选择要添加约束的构件,添加约束后的模型如2-5所示。 图2-5添加约束 至此模型创建完成 三、模型仿真 1)、在无阻尼状态下,系统仅受重力作用自由振动,将最下层弹簧的刚度系数K设置为10,上层两个弹簧刚度系数均设置为3,小物块的支撑弹簧的刚度系数为4,阻尼均为0,进行仿真,点击图标,设置EndTime为5.0,StepSize为0.01,Steps为50,点击图标,开始仿真对所得数据进行分析。 选择物块的位移、速度、加速度与时间的图像如图3-1、3-2、3-3所示,经过傅里叶变换之后我们可以清楚地看到系统的各阶固有频率。 图3-1位移与时间图像以及FFT变换图像 图3-2速度与时间图像以及FFT变换图像 图3-3加速度与时间图像以及FFT变换图像 通过傅里叶变换,从图中可以看出系统为三阶系统,表现出三阶的固有频率,通过测量得到w1=2.72,w2=4.29,w3=6.15.。 2)为了更进一步验证系统的各阶固有频率,我们给系统施加一定频率的正弦激振力,使系统做受迫振动,观察系统的振动情况, (a)F1=50*sin(2*3.14*w1*time)时,物块振动的速度与时间的图像如3-4所示。 图3-4 F1作用下速度与时间图像以及FFT变换图像
弹簧质量阻尼实验指导书范本
弹簧质量阻尼实验 指导书
质量-弹簧-阻尼系统实验教学指导书 北京理工大学机械与车辆学院 .3
实验一:单自由度系统数学建模及仿真 1 实验目的 (1)熟悉单自由度质量-弹簧-阻尼系统并进行数学建模; (2)了解MATLAB 软件编程,学习编写系统的仿真代码; (3)进行单自由度系统的仿真动态响应分析。 2 实验原理 单自由度质量-弹簧-阻尼系统,如上图所示。由一个质量为 m 的滑块、一个刚度系数为k 的弹簧和一个阻尼系数为c 的阻尼器组成。系统输入:作用在滑块上的力f (t )。系统输出:滑块的位移x (t )。 建立力学平衡方程: m x c x kx f ?? ? ++= 变化为二阶系统标准形式: 22f x x x m ζωω?? ? ++= 其中:ω是固有频率,ζ是阻尼比。 ω= 2c m ζω= = 2.1 欠阻尼(ζ<1)情况下,输入f (t )和非零初始状态的响应:
() ()sin()) )] t t x t t d e ζωτ τ ζω ττ +∞ -- = ? - =- +- ? 2.2 欠阻尼(ζ<1)情况下,输入f(t)=f0*cos(ω0*t) 和非零初始状态的的响应: 022 3 00 22222 00 222222 2 ()cos(arctan()) 2f [(0)]cos() [()(2)] sin( t t x t t x e k e ζω ζω ζωω ω ωω ζωω ωωζωω - ? - =- - ++ -+ +) 输出振幅和输入振幅的比值:A= 3 动力学仿真 根据数学模型,使用龙格库塔方法ODE45求解,任意输入下响应结果。 仿真代码见附件 4 实验 4.1 固有频率和阻尼实验 (1)将实验台设置为单自由度质量-弹簧-阻尼系统。 (2)关闭电控箱开关。点击setup菜单,选择Control Algorithm,设置选择Continuous Time Control,Ts=0.0042,然后OK。 (3)点击Command菜单,选择Trajectory,选取step,进入set-up,
ansys和adams刚柔耦合详细步骤
ANSYS与ADAMS进行联合柔性仿真 基本思路:在ANSYS进行.mnf文件输出,然后把输出的.mnf文件输入ADAMS,进行零件更换。然后在ADAMS 进行加载约束,仿真,查看结果。 软件:ANSYS10,ADAMS 2007 R3 具体步骤: 一ANSYS输出.mnf柔性文件 1.1 建立单元 单元1:solid45 或者其他3D单元 单元2:MASS21,此单元只用于连接点单元 设置弹性模量,泊松比,密度3个参数 1.2导入模型(.x_t)或者建立模型 完成后,创建连接点,ANSYS要求必须是2或者2个以上的连接点
创建连接点:如下图,在下面2个圆柱孔的中心,注意是圆柱体的中心,不是某个面得中心,创建2个keypoints。具体方法,看个人而定。 1.3 划分单元 对体用3D单元划分,我选用meshtool方法
接下来设置real constants,这个参数设置,一定要到等到3D网格划分完后再设置 对MASS21 进行设置。
Real constant Set No. 要大于2,下面的值要非常小。 然后对连接点,即keypoints进行单元划分:先设置keypoints 属性,如下 然后划分单元,用meshtool, 对keypoints划分单元,结果如下如下图
1.4建立刚性区域 刚性区域都是节点=连接节点+刚柔接触的面上所有节点 在ANSYS里面,这一步,连接点为主节点,刚柔接触面上的所有节点为从节点首先得按如下2个图片进行主节点和从节点节点组合。(或者用循环语句也行)
1.4.1建立主节点component 选择1个主节点,即连接节点。 接下来
(完整版)系统动力学模型案例分析
系统动力学模型介绍 1.系统动力学的思想、方法 系统动力学对实际系统的构模和模拟是从系统的结构和功能两方面同时进行的。系统的结构是指系统所包含的各单元以及各单元之间的相互作用与相互关系。而系统的功能是指系统中各单元本身及各单元之间相互作用的秩序、结构和功能,分别表征了系统的组织和系统的行为,它们是相对独立的,又可以在—定条件下互相转化。所以在系统模拟时既要考虑到系统结构方面的要素又要考虑到系统功能方面的因素,才能比较准确地反映出实际系统的基本规律。系统动力学方法从构造系统最基本的微观结构入手构造系统模型。其中不仅要从功能方面考察模型的行为特性与实际系统中测量到的系统变量的各数据、图表的吻合程度,而且还要从结构方面考察模型中各单元相互联系和相互作用关系与实际系统结构的一致程度。模拟过程中所需的系统功能方面的信息,可以通过收集,分析系统的历史数据资料来获得,是属定量方面的信息,而所需的系统结构方面的信息则依赖于模型构造者对实际系统运动机制的认识和理解程度,其中也包含着大量的实际工作经验,是属定性方面的信息。因此,系统动力学对系统的结构和功能同时模拟的方法,实质上就是充分利用了实际系统定性和定量两方面的信息,并将它们有机地融合在一起,合理有效地构造出能较好地反映实际系统的模型。 2.建模原理与步骤
(1)建模原理 用系统动力学方法进行建模最根本的指导思想就是系统动力学的系统观和方法论。系统动力学认为系统具有整体性、相关性、等级性和相似性。系统内部的反馈结构和机制决定了系统的行为特性,任何复杂的大系统都可以由多个系统最基本的信息反馈回路按某种方式联结而成。系统动力学模型的系统目标就是针对实际应用情况,从变化和发展的角度去解决系统问题。系统动力学构模和模拟的一个最主要的特点,就是实现结构和功能的双模拟,因此系统分解与系统综合原则的正确贯彻必须贯穿于系统构模、模拟与测试的整个过程中。与其它模型一样,系统动力学模型也只是实际系统某些本质特征的简化和代表,而不是原原本本地翻译或复制。因此,在构造系统动力学模型的过程中,必须注意把握大局,抓主要矛盾,合理地定义系统变量和确定系统边界。系统动力学模型的一致性和有效性的检验,有一整套定性、定量的方法,如结构和参数的灵敏度分析,极端条件下的模拟试验和统计方法检验等等,但评价一个模型优劣程度的最终标准是客观实践,而实践的检验是长期的,不是一二次就可以完成的。因此,一个即使是精心构造出来的模型也必须在以后的应用中不断修改、不断完善,以适应实际系统新的变化和新的目标。 (2)建模步骤 系统动力学构模过程是一个认识问题和解决问题的过程,根据人们对客观事物认识的规律,这是一个波浪式前进、螺旋式上升的过程,因此它必须是一个由粗到细,由表及里,多次循环,不断深化的过程。系统动力学将整个构模过程归纳为系统分析、结构分析、模型建立、模型试验和模型使用五大步骤这五大步骤有一定的先后次序,但按照构模过程中的具体情况,它们又都是交叉、反复进行的。 第一步系统分析的主要任务是明确系统问题,广泛收集解决系统问题的有关数据、资料和信息,然后大致划定系统的边界。 第二步结构分析的注意力集中在系统的结构分解、确定系统变量和信息反馈机制。 第三步模型建立是系统结构的量化过程(建立模型方程进行量化)。 第四步模型试验是借助于计算机对模型进行模拟试验和调试,经过对模型各种性能指标的评估不断修改、完善模型。 第五步模型使用是在已经建立起来的模型上对系统问题进行定量的分析研究和做各种政策实验。 3.建模工具 系统动力学软件VENSIM PLE软件 4.建模方法 因果关系图法 在因果关系图中,各变量彼此之间的因果关系是用因果链来连接的。因果链是一个带箭头的实线(直线或弧线),箭头方向表示因果关系的作用方向,箭头旁标有“+”或“-”号,分别表示两种极性的因果链。
阻尼振动与受迫振动 实验报告
《阻尼振动与受迫振动》实验报告一、实验目的1.观测阻尼振动,学习测量振动系统基本参数的方法;2.研究受迫振动的幅频特性和相频特性,观察共振现象;3.观测不同阻尼对受迫振动的影响。 二、实验原理1.有粘滞阻尼的阻尼振动弹簧和摆轮组成一振动系统,设摆轮转动惯量为J ,粘滞阻尼的阻尼力矩大小定义为角速度d θ/dt 与阻尼力矩系数γ的乘积,弹簧劲度系数为k ,弹簧的反抗力矩为-k θ。忽略弹簧的等效转动惯量,可得转角θ的运动方程为 220d d J k dt dt θθγθ++=记ω0为无阻尼时自由振动的固有角频率,其值为ω0=,定义阻尼系数k/J β=γ/(2J ),则上式可以化为: 2220d d k dt dt θθβθ++=小阻尼即时,阻尼振动运动方程的解为2200βω-< (*)( )) exp()cos i i t t θθβφ=-+由上式可知,阻尼振动角频率为 ,阻尼振动周期为d ω=2d d T π=2.周期外力矩作用下受迫振动的解 在周期外力矩Mcos ωt 激励下的运动方程和方程的通解分别为22cos d d J k M t dt dt θθγθω++=()( ))()exp cos cos i i m t t t θθβφθωφ=-++-这可以看作是状态(*)式的阻尼振动和频率同激励源频率的简谐振动的叠加。一般t >>τ后,就有稳态解 ()()cos m t t θθωφ=-稳态解的振幅和相位差分别为路须同时切断习题电源,备制造厂家出具高中资料需要进行外部电源高中资料
m θ=2202arctan βωφωω=-其中,φ的取值范围为(0,π),反映摆轮振动总是滞后于激励源支座的振动。3.电机运动时的受迫振动运动方程和解弹簧支座的偏转角的一阶近似式可以写成 ()cos m t t ααω=式中αm 是摇杆摆幅。由于弹簧的支座在运动,运动支座是激励源。弹簧总转角为。于是在固定坐标系中摆轮转角θ的运动方程为()cos m t t θαθαω-=-()22cos 0m d d J k t dt dt θθγθαω++-=也可以写成 22cos m d d J k k t dt dt θθγθαω++= 于是得到m θ=由θm 的极大值条件可知,当外激励角频率时, 0m θω ??=ω=系统发生共振,θm 有极大值。α 引入参数,称为阻尼比。(0ζβ ωγ==于是,我们得到 m θ=()()0202arctan 1ζωωφωω=-三、实验任务和步骤 1.调整仪器使波耳共振仪处于工作状态。 2.测量最小阻尼时的阻尼比ζ和固有角频率ω0。进行隔开处理;同一线槽内人员,需要在事前掌握图纸电机一变压器组在发生内部
系统动力学模型
第10 章系统动力学模型 系统动力学模型(System Dynamic)是社会、经济、规划、军事等许多领域进行战略研究的重要工具,如同物理实验室、化学实验室一样,也被称之为战略研究实验室,自从问世以来,可以说是硕果累累。 1 系统动力学概述 2 系统动力学的基础知识 3 系统动力学模型 第1 节系统动力学概述 1.1 概念系统动力学是一门分析研究复杂反馈系统动态行为的系统科学方法,它是系统科学的一个分支,也是一门沟通自然科学和社会科学领域的横向学科,实质上就是分析研究复杂反馈大系统的计算仿真方法。 系统动力学模型是指以系统动力学的理论与方法为指导,建立用以研究复杂地理系统动态行为的计算机仿真模型体系,其主要含义如下: 1 系统动力学模型的理论基础是系统动力学的理论和方法; 2 系统动力学模型的研究对象是复杂反馈大系统; 3 系统动力学模型的研究内容是社会经济系统发展的战略与决策问题,故称之为计算机仿真法的“战略与策略实验室” ; 4 系统动力学模型的研究方法是计算机仿真实验法,但要有计算 机仿真语言DYNAMIC勺支持,如:PD PLUS VENSIM等的支持; 5 系统动力学模型的关键任务是建立系统动力学模型体系; 6 系统动力学模型的最终目的是社会经济系统中的战略与策略决策问题计
算机仿真实验结果,即坐标图象和二维报表; 系统动力学模型建立的一般步骤是:明确问题,绘制因果关系图,绘制系统动力学模型流图,建立系统动力学模型,仿真实验,检验或修改模型或参数,战略分析与决策。 地理系统也是一个复杂的动态系统,因此,许多地理学者认为应用系统动力学进行地理研究将有极大潜力,并积极开展了区域发展,城市发展,环境规划等方面的推广应用工作,因此,各类地理系统动力学模型即应运而生。 1.2 发展概况 系统动力学是在20世纪50年代末由美国麻省理工学院史隆管理学院教授福雷斯特(JAY.W.FORRESTERI出来的。目前,风靡全世界,成为社会科学重要实验手段,它已广泛应用于社会经济管理科技和生态灯各个领域。福雷斯特教授及其助手运用系统动力学方法对全球问题,城市发展,企业管理等领域进行了卓有成效的研究,接连发表了《工业动力学》,《城市动力学》,《世界动力学》,《增长的极限》等著作,引起了世界各国政府和科学家的普遍关注。 在我国关于系统动力学方面的研究始于1980 年,后来,陆续做了大量的工作,主要表现如下: 1 )人才培养 自从1980年以来,我国非常重视系统动力学人才的培养,主要采用“走出去,请进来”的办法。请进来就是请国外系统动力学专家来华讲学,走出去就是派留学生,如:首批派出去的复旦大学管理学院的王其藩教授等,另外,还多次举办了全国性的讲习班。 2 )编译编写专著
《机械系统动力学仿真分析软件》
| 论坛社区 《机械系统动力学仿真分析软件》(MSC.ADAMS.2005.R2)R2 资源分类: 软件/行业软件 发布者: Coolload 发布时间: 2005-12-18 20:22 最新更新时间: 2005-12-19 07:04 浏览次数: 14548 实用链接: 收藏此页 eMule资源 下面是用户共享的文件列表,安装eMule后,您可以点击这些文件名进行下载 [机械系统动力学仿真分析软件].[$u]MSC.ADAMS.2005.R2.rar201.2MB [机械系统动力学仿真分析软 295.4MB 件].MSC_ADAMS_V2005_ISO-LND-CD1.iso [机械系统动力学仿真分析软185.0MB
件].MSC_ADAMS_V2005_ISO-LND-CD2.bin [机械系统动力学仿真分析软 6.5KB 件].Msc.Adams.v2005.Iso-Lnd-Cd1-Crack.rar 全选480.4MB eMule主页下载eMule使用指南如何发布 中文名称:机械系统动力学仿真分析 软件 英文名称:MSC.ADAMS.2005.R2 版本:R2 发行时间:2005年12月15日 制作发行:美国MSC公司 地区:美国 语言:英语 简介: [通过安全测试] 杀毒软件:Symantec AntiVirus 版本: 9.0.0.338 病毒库:2005-12-16 共享时间:10:00 AM - 24:00 PM(除 非线路故障或者机器故障) 共享服务器:Razorback 2.0 [通过安装测试]Windows2000 SP4 软件版权归原作者及原软件公司所 有,如果你喜欢,请购买正版软件
实验三 弹簧阻尼器机构的动力学模拟
实验三 弹簧阻尼器机构的动力学模拟 一、实验目的 1.掌握多体动力学分析软件ADAMS 中实体建模方法; 2.掌握ADAMS 中施加约束和驱动的方法; 3.计算出弹簧阻尼机构运动时,弹簧振子的位移、速度、加速度和弹簧位移与弹簧力的对应关系。 二、实验设备和工具 1.ADAMS 软件; 2.CAD/CAM 机房。 三、实验原理 按照弹簧阻尼器机构的实际工况,在软件中建立相应的几何、约束及驱动模型,即按照弹簧阻尼器机构的实际尺寸,建立弹簧、阻尼器和质量块的几何实体模型;质量块的运动为上下作自由衰减运动,可以理论简化为在质量块与大地之间建立平动副,弹簧、阻尼器共同连接到连接大地和质量块上;然后利用计算机进行动力学模拟,从而可以求得质量块在弹簧阻尼器连接下任何时间、任何位置所对应的位移、速度加速度,以及弹簧中位移和弹性恢复力之间的对应关系等一系列参数,变换弹簧、阻尼器和质量块的参数可以进行多次不同状态下的模拟。 四、实验步骤 1.问题描述 图3-1为弹簧阻尼器机构简图,M 为振子,质量为187.224kg ;弹簧刚度K =5N/mm ,阻尼器阻尼为C =0.05N/mm ,弹簧空载长度为400mm ,求当弹簧阻尼机构振动时,铰接点A 处的支撑力。 2. 启动 ADAMS M :187.224Kg K :5.0N/mm C :0.05N-sec/mm L0:400mm F0:0 图3-1 弹簧阻尼器机构示意图
2.1 运行ADAMS2005,在欢迎界面中,选择Create a new model, Model name 输入spring_mass; 2.2 确认Gravity(重力)文本框中是Earth Normal(-Global Y),Units (单位)文本框中是MMKS(mm,kg,N,s,deg)。 3. 建立几何模型 3.1单击F4显示坐标窗口; 3.2在主工具箱中选择Box 工具按钮建立一质量块,用默认尺寸即可; 3.3 在屏幕任意位置点击鼠标创建质量块; 3.4 右键点击质量块,选择part_2,然后选择Rename,更名为mass; 3.5 右键点击质量块,选择mass,然后选择Modify。在打开的对话框中修改Define mass by 项为User Input,在Mass栏输入187.224; 3.6 选择右视图按钮查看质量块的位置,进行调整栅格位于质量块的中心。选择Edit菜单下的Move项,在对话框中选择Relocate the项为Part,右键点击右侧文本框选择Part,出现Guesses然后选择mass ,如图3-2所示。 图3-2 选择移动质量块 3.7 在Translate下方的数字栏中输入-100,或者输入100再单击前面的按钮,如图3-3所示; 图3-3 移动对话框
21ADAMS柔性体-刚柔耦合模块详解
ADAMS柔性体-刚柔耦合模块 ADAMS柔性体理论 1、ADAMS研究体系: a)刚体多体系统(低速运动) b)柔性多体系统(考虑弹性变形,大轻薄,高速) c)刚柔耦合多体系统(根据各个构件情况考虑,常用普遍仿真类型)大部分仿真分析都采用的是刚性构件,在受到力的作用不会产生变形,现实中把大部分构件当做 刚性体处理是可以满足要求的,因为各个零件之间的弹性变形对于机构各部分的动态特性影响微乎其微。 但是需要考虑构件变形,变形会影响精度结果,需要对构件其应力大小和分布以及载荷输出研究的时候,以及薄壁构件,高精密仪器部件等,则需要当做柔性体对待,这样计算结果会准确一些。对于柔性体机构,变形对动态影响起着决定性作用,刚柔耦合系统约束的添加必须考虑各个零部件之间的连接和受力关系,更可能还原实际工况,从而使模型更真实还原。 2、柔性体 柔性体是由模态构成的,要得到柔性体就需要计算构件的模态。柔性体最重要的假设就是仅考虑了相对于连体坐标系得晓得线性变形,而连体坐标系同时也在做大的非线性运动。 对于柔性体变形,模态中性文件必然存在某一些模态不响应,没有参与变形或者变性太大,参与系数非常小,比如前六阶或者不正常的阶数,如果去掉贡献较小的模态阶数,便可以提高仿真的效率。 3、模态谈到柔性体,就必然脱不了模态的概念,构件的模态是构件自身的一个物理属性,一个构件一旦制造出来,他的模态就是自身的一种属性,再将几何模型离散成有限元模型以后,有限元模型的各个节点有一定的自由度,这样所有的节点自由度的和就构成了有限元模型的自由度,一个有限元模型有多少自由度,它就有多少阶模态。由于构件各个节点的实际位移是模态的按一定比例的线性叠加,这个比例就是一个系数,通常成为模态参与因子,参与因子越大,对应的模态对于构件变形的贡献量越多,因此对构件的振动分析,可以从构件的模态参与因子大小来分析,如果构建在振动时,某阶模态的参与因子大,可以通过改进设计,抑制改接模态对振动贡献量,可以明显降低构件的振动。 利用有限元技术,通过计算构件的自然频率和对应的模态,按照模态理论,将构件产生的变形看作是由构件模态通过线性计算得到的。在计算构建模态时,按照有限元理论,首先要将构件离散成一定数量的单元,单元数量越多,计算精度越高,单元之间通过共用一个节点来转递力的作用,在一个单元上的两个点之间可以产生相对位移,再通过单元的材料属性,进一步计算出构建的内应力和应变。 ....... 柔性体模态与有限元模态区别不同? ....... 约束模态? ....... 正交模态? ADAM中建立柔性体的三种方法:离散柔性连接杆、ADAMS/ViewFlex模块生成mnf文件、FEA有限元软件输出mnf文件 离散柔性连接杆 1、定义:将一个构件离散成几段或者许多段小刚性构件,每个小刚性构件之间通过柔性梁连接,变形也只是柔性梁的变形,并不是那些刚性体的变形,刚性体上任意两点的之间并不会产生位移,本质上依旧是刚性构件柔性连接不算真的柔性体,该方法只限于简单构件的使用。 2、使用方法(ADAMS软件实例解说操作) 3、每段离散件都有自己的质心坐标系、名称、颜色和质量信息等属性,每段离散件都是独立的,可以分别编辑。
弹簧-高质量-阻尼实验指导书
质量-弹簧-阻尼系统实验教学指导书 北京理工大学机械与车辆学院 2016.3
实验一:单自由度系统数学建模及仿真 1 实验目的 (1)熟悉单自由度质量-弹簧-阻尼系统并进行数学建模; (2)了解MATLAB 软件编程,学习编写系统的仿真代码; (3)进行单自由度系统的仿真动态响应分析。 2 实验原理 单自由度质量-弹簧-阻尼系统,如上图所示。由一个质量为m 的滑块、一个 刚度系数为k 的弹簧和一个阻尼系数为c 的阻尼器组成。系统输入:作用在滑块上的力f (t )。系统输出:滑块的位移x (t )。 建立力学平衡方程: m x c x kx f ??? ++= 变化为二阶系统标准形式: 22f x x x m ζωω?? ? ++= 其中:ω是固有频率,ζ是阻尼比。 ω= 2c m ζω= = 2.1 欠阻尼(ζ<1)情况下,输入f (t )和非零初始状态的响应: ()()sin()))] t t x t t d e ζωττζωττ +∞ --=? -= -+-?
2.2 欠阻尼(ζ<1)情况下,输入f(t)=f0*cos(ω0*t) 和非零初始状态的的响应: 022 3 00 22222 00 222222 2 ()cos(arctan()) 2f [(0)]cos() [()(2)] sin( t t x t t x e k e ζω ζω ζωω ω ωω ζωω ωωζωω - ? - =- - ++ -+ +) 输出振幅和输入振幅的比值:A= 3 动力学仿真 根据数学模型,使用龙格库塔方法ODE45求解,任意输入下响应结果。 仿真代码见附件 4 实验 4.1 固有频率和阻尼实验 (1)将实验台设置为单自由度质量-弹簧-阻尼系统。 (2)关闭电控箱开关。点击setup菜单,选择Control Algorithm,设置选择Continuous Time Control,Ts=0.0042,然后OK。 (3)点击Command菜单,选择Trajectory,选取step,进入set-up,选取Open Loop Step设置(0)counts, dwell time=3000ms,(1)rep, 然后OK。此步是为了使控制器得到一段时间的数据,并不会驱动电机运动。 (4)点击Data菜单,选择Data Acquisition,设置选取Encoder#1 ,然后OK离开;从Utility菜单中选择Zero Position使编码器归零。 (5)从Command菜单中选择Execute,用手将质量块1移动到2.5cm左右的位置(注意不要使质量块碰触移动限位开关),点击Run, 大约1秒后,放开手使其自由震荡,在数据上传后点击OK。 (6)点击Plotting菜单,选择Setup Plot,选取Encoder #1 Position;然后点击Plotting菜单,选择Plot Data,则将显示质量块1的自由振动响应曲线。(7)在得到的自由振动响应曲线图上,选择n个连续的振幅明显的振动周期,计算出这段振动的时间t,由n/t即可得到系统的频率,将Hz转化为rad/sec即为系统的振动频率ω。
大学物理实验简谐振动与阻尼振动的实验报告
湖北文理学院物理实验教学示范中心 实 验 报 告 学院 专业 班 学号: 姓名: 实验名称 简谐振动与阻尼振动的研究 实验日期: 年 月 日 实验室: N1-103 [实验目的]: 1. 验证在弹性恢复力作用下,物体作简谐振动的有关规律;测定弹簧的弹性系数K 和有效质量m. 2. 测定阻尼振动系统的半衰期和品质因数,作出品质因数Q 与质量M 的关系曲线。 [仪器用具]:仪器、用具名称及主要规格(包括量程、分度值、精度等) 气垫导轨、滑块、附加质量(2)、弹簧(4)、光电门(2)、数字毫秒计. [实验原理]:根据自己的理解用简练的语言来概括(包括简单原理图、相关公式等) 1.简谐振动 在水平气垫导轨上的滑块m 的两端连接两根弹性系数1k 、2k 近乎相等的弹簧,两弹簧的另一端分别固定在气轨的两端点。滑块的运动是简谐振动。其周期为: 2 122k k M T +== π ω π 由于弹簧不仅是产生运动的原因,而且参 加运动。因此式中M 不仅包含滑块(振子)的质量m ,还有弹簧的有效质量0m 。M 称为弹簧振子系统的有效质量。经验 证:0m m M += 其中 s m m 31 0=,s m 为弹簧质量。假设:k k k ==21则有周期: 22T πω= = 若改变滑块的质量m ?,则周期2T 与m ?成正比。222 4422M m T k k ππ?=+。以2T 为纵坐标,以m ?为横坐标,作2T -m ?曲线。则为一条斜率为242k π的直线。由斜率可以求出弹簧的弹性系数k 。求出弹性系数后再根据式22 42M T k π=求出弹簧的 有效质量。 2.阻尼振动 简谐振动是一种振幅相等的振动,它是忽略阻尼振动的理想情况。事实上,阻尼力不可避免,而抵抗阻力做功的结果,使振动系统的能量逐渐减小。因此,实验中发生的一切自由振动,振幅总是逐渐减小以至等于零的。这种振动称为阻尼振动。用品质因数(即Q 值),来反映阻尼振动衰减的特性。其定义为:振动系统的总能量E 与在一个周期中所损耗能 量E ?之比的π2倍,即 2E Q E π =?;通过简单推导也有: 12 ln 2 T Q T π= 2 1T 是 阻尼振动的振幅从 0A 衰减为 2 0A 所用时 间,叫做半衰期。测出半衰期就可以计算出品质因数Q 。在实验中,改变滑块的质量。作质量与品质因数的关系曲线。 [实验内容]: 简述实验步骤和操作方法 1. 打开气泵观察气泵工作是否正常,气轨出气孔出气大小是否均匀。 2. 放上滑块,调节气轨底座,使气轨处于水平状态。 3. 把滑块拉离平衡位置,记录下滑块通过光电门10次所用的时间。 4. 改变滑块质量5次,重复第3步操作。 5. 画出m T -2 关系曲线,.据m T -2关系曲线,求出斜率K ,并求出弹性系数k 。 6. 用天平测量滑块(附挡光片)、每个附加物的质量后;求出弹簧的有效质量。 7. 用秒表测量滑块儿的振幅从A 0衰减到A 0/2所用的时间2 1T ;求出系统的品质因数Q 8. 滑块上增至4个附加物,重复步骤7作出Q-m ?的关系曲线;
弹簧-质量-阻尼实验指导书
质量-弹簧-阻尼系统实验教学指导书 理工大学机械与车辆学院 2016.3
实验一:单自由度系统数学建模及仿真 1 实验目的 (1)熟悉单自由度质量-弹簧-阻尼系统并进行数学建模; (2)了解MATLAB 软件编程,学习编写系统的仿真代码; (3)进行单自由度系统的仿真动态响应分析。 2 实验原理 单自由度质量-弹簧-阻尼系统,如上图所示。由一个质量为m 的滑块、一个 刚度系数为k 的弹簧和一个阻尼系数为c 的阻尼器组成。系统输入:作用在滑块上的力f (t )。系统输出:滑块的位移x (t )。 建立力学平衡方程: m x c x kx f ??? ++= 变化为二阶系统标准形式: 22f x x x m ζωω?? ? ++= 其中:ω是固有频率,ζ是阻尼比。 ω= 2c m ζω= = 2.1 欠阻尼(ζ<1)情况下,输入f (t )和非零初始状态的响应: ()()sin()))] t t x t t d e ζωττζωττ +∞ --=? -= -+-?
2.2 欠阻尼(ζ<1)情况下,输入f(t)=f0*cos(ω0*t) 和非零初始状态的的响应: 022 3 00 22222 00 222222 2 ()cos(arctan()) 2f [(0)]cos() [()(2)] sin( t t x t t x e k e ζω ζω ζωω ω ωω ζωω ωωζωω - ? - =- - ++ -+ +) 输出振幅和输入振幅的比值:A= 3 动力学仿真 根据数学模型,使用龙格库塔方法ODE45求解,任意输入下响应结果。 仿真代码见附件 4 实验 4.1 固有频率和阻尼实验 (1)将实验台设置为单自由度质量-弹簧-阻尼系统。 (2)关闭电控箱开关。点击setup菜单,选择Control Algorithm,设置选择Continuous Time Control,Ts=0.0042,然后OK。 (3)点击Command菜单,选择Trajectory,选取step,进入set-up,选取Open Loop Step 设置(0)counts, dwell time=3000ms,(1)rep, 然后OK。此步是为了使控制器得到一段时间的数据,并不会驱动电机运动。 (4)点击Data菜单,选择Data Acquisition,设置选取Encoder#1 ,然后OK离开;从Utility菜单中选择Zero Position使编码器归零。 (5)从Command菜单中选择Execute,用手将质量块1移动到2.5cm左右的位置(注意不要使质量块碰触移动限位开关),点击Run, 大约1秒后,放开手使其自由震荡,在数据上传后点击OK。 (6)点击Plotting菜单,选择Setup Plot,选取Encoder #1 Position;然后点击Plotting 菜单,选择Plot Data,则将显示质量块1的自由振动响应曲线。 (7)在得到的自由振动响应曲线图上,选择n个连续的振幅明显的振动周期,计算出这段振动的时间t,由n/t即可得到系统的频率,将Hz转化为rad/sec即为系统的振动频率ω。
阻尼振动与受迫振动实验报告
阻尼振动与受迫振动实验报告 一、实验目的 (一)观察扭摆的阻尼振动,测定阻尼因数。 (二)研究在简谐外力矩作用下扭摆的受迫振动,描绘扭摆在不同阻尼的情况下的共振曲线(即幅频特性曲线)。 (三)描绘外加强迫力矩与受迫振动之间的位相随频率变化的特性曲线(即相频特性曲线)。 (四)观测不同阻尼对受迫振动的影响。 二、实验仪器 扭摆(波尔摆)一套,秒表,数据采集器,转动传感器。 三、实验任务 1、调整仪器使波耳共振仪处于工作状态。 2、测量最小阻尼时的阻尼比ζ和固有角频率ω0。 3、测量其他2种或3种阻尼状态的振幅,并求ζ、τ、Q和它们的不确定度。 4、测定受迫振动的幅频特性和相频特性曲线。 四、实验步骤 1、打开电源开关,关断电机和闪光灯开关,阻尼开关置于“0”档,光电门H、I可以手动微调,避免和摆轮或者相位差盘接触。手动调整电机偏心轮使有机玻璃转盘F上的0位标志线指示0度,亦即通过连杆E和摇杆M使摆轮处于平衡位置。然后拨动摆轮使偏离平衡位置150至200度,松开手后,检查摆轮的自由摆动情况。正常情况下,震动衰减应该很慢。 2、开关置于“摆轮”,拨动摆轮使偏离平衡位置150至200度后摆动,由大到小依次读取显示窗中的振幅值θj;周期选择置于“10”位置,按复位钮启动周期测量,停止时读取数据10 T。 d 并立即再次启动周期测量,记录每次过程中的10 T的值。 d (1)逐差法计算阻尼比ζ; (2)用阻尼比和振动周期T d计算固有角频率ω0。 3、依照上法测量阻尼(2、3、4)三种阻尼状态的振幅。求出ζ、τ、Q和它们的不确定度。 4、开启电机开关,置于“强迫力”,周期选择置于“1”,调节强迫激励周期旋钮以改变电机运动角频率ω,选择2个或3个不同阻尼比(和步骤3中一致),测定幅频和相频特性曲线,注意阻尼比较小(“0”和“1”档)时,共振点附近不要测量,以免振幅过大损伤弹簧;每次调节电机状态后,摆轮要经过多次摆动后振幅和周期才能稳定,这时再记录数据。要求每