Keil MDK4+JLINK V8基于LPC1788的调试V1.0

文档制作人:万里无云烟(百度文库);QQ群号:213586959
Keil MDK4.50+JLINK V8基于LPC1788的调试V1.0 1 调试具备的最基本条件
1.1首先应安装好Keil MDK编译器
上网下载Keil MDK的最新版本(要求版本最好4.50以上),
如已经含有破解补丁最好,如没有,则一般下载版本编译代码
长度和使用年限会受限制,此时你可下载低版本的破解补丁,
按照破解说明做破解即可。
1.2其次要安装好J-link的驱动
J-link的驱动,一般购买J-link ARM JTAG仿真器(现在固件
最新版为V8)时,都会带一张含驱动程序的光盘,按照光盘中
的驱动安装说明安装即可,但我个人建议你安装最新的驱动,
最新的驱动到segger官网即可免费下载,下面是我下载最新的
驱动的地址:https://www.360docs.net/doc/5e10617759.html,/cms/jlink-software.html。
1.3目标板、仿真器和PC机间连接
首先将仿真器的JTAG口连接到目标板的调试接口,其次将目
标板上电,最后,将仿真器的USB口连接到PC机上。此时电
脑会告诉你发现新硬件并自动安装新的驱动。安装完成后会告
诉你新驱动已安装完成。至此,准备工作已完成,接下去的工
作是新项目的建立、代码编写、项目配置(包含仿真器的选择
等)、编译项目、调试项目。
2新项目的建立
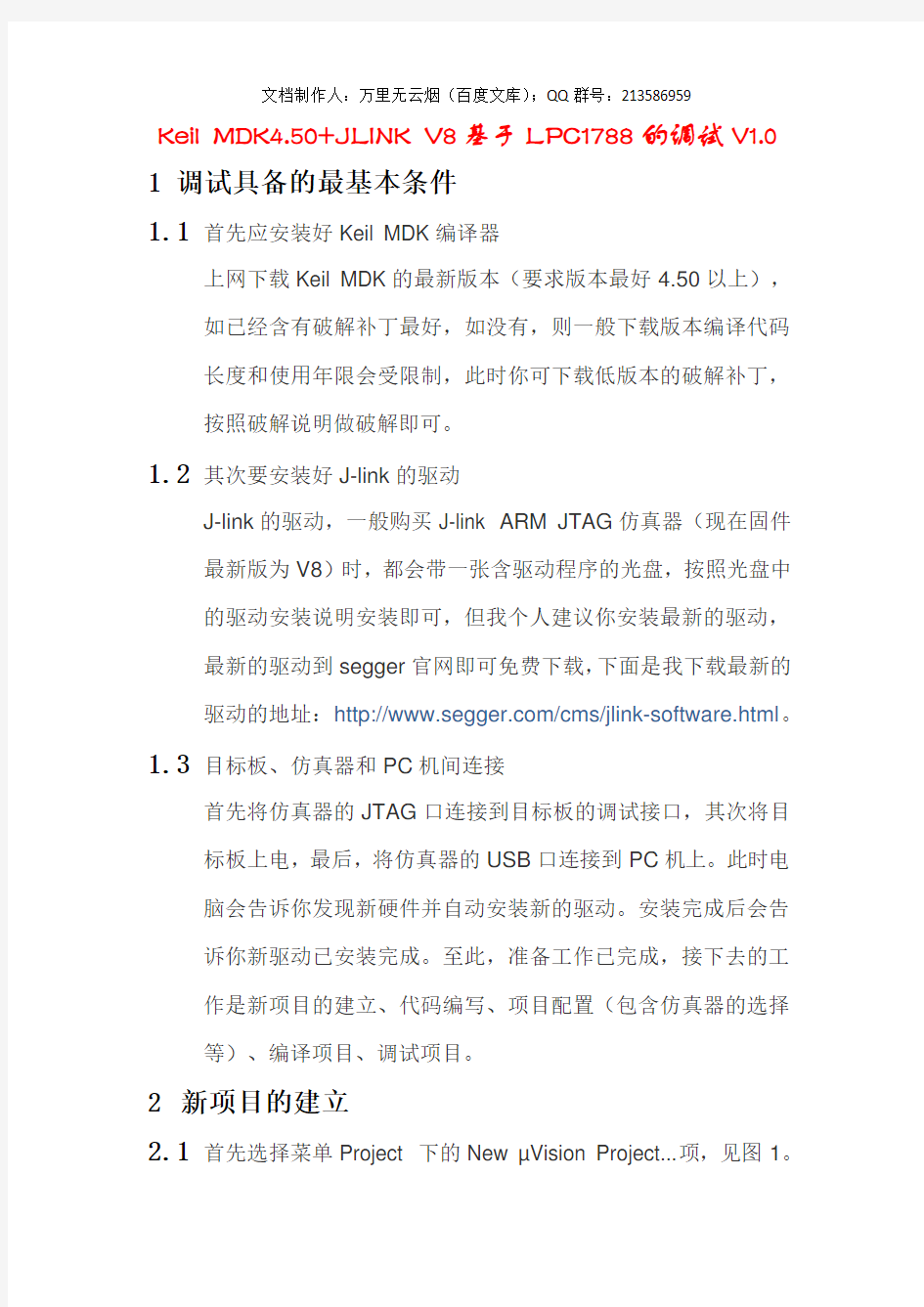
2.1首先选择菜单Project 下的New μVision Project...项,见图1。
图1 选择菜单Project 下的New μVision Project...项
2.2选择New μVision Project...项后Keil μVision 4将打开一个项
目保存对话框,见图2。
图2 项目保存对话框
在这个对话框处,你可选择新建项目保存路径或保存位置,建议保存到自己熟悉的位置,以便日后查询;项目名称建议选择你要实现功能的简称(例如:你要驱动LED灯,则可将项目名称定为GPIO_LED)。选择好保存路径后,在“文件名(N):”对应栏中输入希望新建项目的名字,即可创建一个新的项目。我选择保存路径为D:\ GPIO_LED\ GPIO_LED.uvproj,见图3。
图3 新项目保存路径
点击图3中“保存”按钮,则会弹出选择CPU类型对话框,选择厂商“NXP(founded by philips)”下面的“LPC1788”,见图4。
图4 选择CPU类型
点击“OK”即可。会弹出需要复制启动文件到项目文件夹和
添加文件到项目对话框,见图5,点击“是”即可,至此一
个项目新建完成(注:对于一些设备而言,Keil μVision需要
用户手动地输入额外的参数)。
图5 复制启动文件到项目文件夹和添加文件到项目对话框
新项目建完后,Keil μVision环境中项目窗口显示见图6。
图6 项目窗口显示新建项目
2.3此项点旨在告诉读者一个项目需要链接的文件,也为接下来的
项目配置打下伏笔。打开一个驱动LED的例子程序。见图7。
图7 项目视窗中一个项目需要链接的文件
3项目配置
3.1进入项目配置
选择“project”下的“options for Target ’FLASH’…”选项,见图8。
图8 选择“project”下的“options for Target ’FLASH’…”选项3.2选择“options for Target ’FLASH’…”选项后弹出项目配置对
话框,或者目标FLASH或RAM选项,见图9。
图9 目标FLASH或RAM选项
此次仅对几个关键项点作介绍,以后版本更新时再做详细介绍,这几个关键项点是:1 Target(目标选项);2 Output(输出选项);
3 Debug(调试选项);
4 Utilities(工具选项)。
3.3Target(目标选项)设置,我仅更改了晶振“Xtal(MHz)”频率,
和目标板晶振频率一致,也可不做修改,默认即可,其它项采
用默认,也可进行优化修订,这个以后再做介绍。见图10。
图10 “Xtal(MHz)”频率改为24
3.4Output(输出选项)设置,按图11选择,选择创建扩展名为HEX,
文件保存路径选择按图11上的按钮,选
择HEX文件保存位置,建议保存在项目所在的文件夹下。
图11 Output(输出选项)设置
3.5Debug(调试选项)设置,硬件仿真“Use:”选择见图12。
图12 硬件仿真“Use:”选择
硬件仿真“Use:”选择完成后,选择好用于硬件仿真的硬件见图13。
图13 选择好用于硬件仿真的硬件
点击硬件仿真处的按钮,则会弹出仿真硬件设置界面,如果连接成功,则会弹出硬件相关信息,可设置项按图14设置。
图14 仿真硬件设置界面及相关设置
3.6Utilities(工具选项)设置,按图15设置即可。
图15 Utilities(工具选项)设置至此,项目配置的几个关键项点简单设置完成。4代码编写
代码编写这里就不赘述了。
5编译项目
5.1编译快捷工具栏见图16。
图16 编译快捷工具栏
:编译当前文件。
:仅编译已修改的文件。
:编译所有文件,我习惯使用这个。
:这个不做介绍。
:停止编译当前文件。
:程序下载到目标板FLASH区。
:配置目标选项工具,即项目配置快捷工具,点击此快捷工具,即可进入“options for Target ’FLASH’…”界面。见图17。
图17 “options for Target ’FLASH’…”界面
:项目部件管理快捷工具。使用可参考百度文库中文件“Keil MDK 3.5 Jlink V8 在STM32中SRAM 调试成功方法成功.pdf”,链接地
址:https://www.360docs.net/doc/5e10617759.html,/view/0ccb13fffab069dc502201af.html。
文章介绍的还是比较具体的,这里我就不在赘述了。以后有更
深刻的理解后再在此处更新。
6调试项目
6.1调试快捷工具栏见图18。
图18 调试快捷工具栏
:进入调试界面。
:设置断点。光标设到要设计断点的代码行,单击此按钮,即为该代码行设置了断点,再次单击,则取消所设的断点。
:使能或禁止断点。将光标定位到已经设置了断点的代码行处,单击此按钮,该断点被禁止,再次单击此按钮,断点使
能。
:使能/禁止所有断点。
:取消所有断点。
:打开或关闭工程视图。
:项目配置快捷工具。点击此工具,则会弹出配置界面,见图19。
图19 配置界面
1 编辑选项卡(Editor):用来设置一些编辑信息,比如缩进的设置,显示行号设置,界面显示效果等等。
2 颜色和字体(Colors&Fonts):如果默认的关键字颜色,代码颜色,代码字体、大小不符合你的习惯,可以在这里进行更该,在这里还可以更改用户自定义关键字。
3 用户关键字(User Keywords):非常好用的一个功能,它可以使你自己定义的关键字像系统关键字一样高亮显示。假如你有想写一个移植性比较高的程序,通常一些和编译器无关的变量类型需要这样定义:
typedef unsigned char uint8; /* 无符号8位整型变量*/ typedef signed char int8; /* 有符号8位整型变量*/ typedef unsigned short uint16; /* 无符号16位整型变量*/ 然后在其它模块中都是这样定义一个无符号8位整形变量:uint8 test;//定义变量
这样有一个什么问题呢?就是uint8这个虽然是用户定义的关键字,但是它并不能像系统关键字那样高亮显示。怎么办呢?完全有办法解决,而且就是在这个标签卡中就可完成。选择“User Keywords”后,见图20。
图20 选择“User Keywords”项后显示
设置方法如下:
(1)在图20左侧窗口选择文件类型,比如C/CPP Editor files;
(2)在右侧窗口点击按钮,新建一个用户关键字编辑框,输入用户定义的关键字,比如uint8,见图21。这样在程序代码中,所有的uint8都会高亮显示。
图21 新建一个用户关键字uint8
4 快捷键(Shortcut Keys)。估计应该和Windows快捷键设置差不多,暂时没用到,略过不说。
5 模板代码(Templates)。这又是一个比较实用的功能,模板既有软件自带的,也可以自己编辑模板。可以在你书写程序的时候使用这一功能加快代码的输入。选择“Templates”项后,见图22。
图22 选择“Templates”项后显示
使用方法:
(1)可以在该选项卡中编辑自己的代码模板,也可以用软件自带的模板。
(2)使用打开或关闭工程视图快捷工具,选中该工具下拉菜单中的“Templates”项;见图23。
图23 选中工程视图快捷工具下拉菜单中的“Templates”项选中后会在工程工作空间(Project WorkSpace)中出现
标签,再编写代码,应用即可。见图24。
图24 工程工作空间(Project WorkSpace)中出现标签
Linux内核崩溃原因分析及错误跟踪技术
Linux内核崩溃原因分析及错误跟踪技术 随着嵌入式Linux系统的广泛应用,对系统的可靠性提出了更高的要求,尤其是涉及到生命财产等重要领域,要求系统达到安全完整性等级3级以上[1],故障率(每小时出现危险故障的可能性)为10-7以下,相当于系统的平均故障间隔时间(MTBF)至少要达到1141年以上,因此提高系统可靠性已成为一项艰巨的任务。对某公司在工业领域14 878个控制器系统的应用调查表明,从2004年初到2007年9月底,随着硬软件的不断改进,根据错误报告统计的故障率已降低到2004年的五分之一以下,但查找错误的时间却增加到原来的3倍以上。 这种解决问题所需时间呈上升的趋势固然有软件问题,但缺乏必要的手段以辅助解决问题才是主要的原因。通过对故障的统计跟踪发现,难以解决的软件错误和从发现到解决耗时较长的软件错误都集中在操作系统的核心部分,这其中又有很大比例集中在驱动程序部分[2]。因此,错误跟踪技术被看成是提高系统安全完整性等级的一个重要措施[1],大多数现代操作系统均为发展提供了操作系统内核“崩溃转储”机制,即在软件系统宕机时,将内存内容保存到磁盘[3],或者通过网络发送到故障服务器[3],或者直接启动内核调试器[4]等,以供事后分析改进。 基于Linux操作系统内核的崩溃转储机制近年来有以下几种: (1) LKCD(Linux Kernel Crash Dump)机制[3]; (2) KDUMP(Linux Kernel Dump)机制[4]; (3) KDB机制[5]; (4) KGDB机制[6]。 综合上述几种机制可以发现,这四种机制之间有以下三个共同点: (1) 适用于为运算资源丰富、存储空间充足的应用场合; (2) 发生系统崩溃后恢复时间无严格要求; (3) 主要针对较通用的硬件平台,如X86平台。 在嵌入式应用场合想要直接使用上列机制中的某一种,却遇到以下三个难点无法解决: (1) 存储空间不足 嵌入式系统一般采用Flash作为存储器,而Flash容量有限,且可能远远小于嵌入式系统中的内存容量。因此将全部内存内容保存到Flash不可行。
SSB变桨系统试验常见故障
1.SSB变桨系统地面出厂试验时,在调整95°限位开关及挡块位置时操作人员不慎将60947-5-1#95°限位开关直动头冲断。 2.G8-064315变桨控制柜,实验时变桨速度过快,执行速度远大于设定速度。初步判 断电机驱动器损坏,造成无法正常使用。 3. 473399-60#旋编编码器做变桨功能试验时,编码器存在角度无变化故障 4、466631-04#旋编编码器做变桨功能试验时,编码器存在角度跳变故障 5. 叶轮功能试验时,由于操作人不慎误将G8-070588变桨控制柜内的1F1防雷模块的火线与零线接反,导致1F1防雷模块烧坏。 6.变桨控制柜实验时系统报电机过温PTC故障,经更换柜内9A1模块后此故障消除。 7、变桨控制柜实验时系统报电机过温PTC故障,经更换柜内9A1模块后此故障消除。 8、G8-070093#变桨控制柜实验时柜内12A1模块指示灯不亮,经更换此故障消除。 9. 旋编编码器做变桨功能试验时,编码器角度始终保持在0°无变化,无法正常使用。 10、旋编编码器旋转时有卡阻现象,并且内部有异响。无法正常使用 11. 95°限位开关压下直动头不能正常复位,造成该95°限位开关无法正常使用。 12. 变桨系统中有2个限位开关触头有卡阻现象,活动不自如,无法正常使用。 13. 叶轮组在调试时发现,闭合电容开关时,9U1不动作,面板上显示9U1故障,无法正常使用 14. LED显示H.N,面板显示:变流器故障,散热片温度故障,无法正常使用。 15. 变桨柜G8-065677打开电容开关后面板显示电容电压9U1为故障状态,9U1不动作,无法正常使用。 16. SSB控制柜配套带来的旋转编码器形状不同, 一套三个旋编信号线接头位置不同,装后性能不受影响。
实验一 汇编语言程序的调试与运行
实验一汇编语言程序的调试与运行 一、实验目的 1.熟练掌握DEBUG的常用命令,学会用DEBUG调试程序。 2.掌握数据在内存中的存放方式和内存操作数的寻址方式。 3.掌握汇编语言源程序的组成格式。 4.掌握8086/8088指令及伪指令的格式及用法。 5.掌握汇编语言源程序的编辑、调试及运行方法。 二、实验准备知识 1.DEBUG程序的启动 DEBUG是专门为汇编语言设计的一种汇编语言调试工具,它通过单步执行,设置断点连续执行等方式为汇编语言程序员提供了非常有效的调试手段。 在DOS提示符下,可输入命令: C>DEBUG [d:][path][文件名][ 参数1][参数2] 其中文件名是被调试文件的名称,它必须是执行文件(.EXE),两个参数是运行被调试文件时所需要的命令参数,在DEBUG程序调入后,出现提示符“–”,此时,可键入所需的DEBUG命令。 在启动DEBUG时,如果输入了文件名,则DEBUG程序把指定文件装入内存。用户可以通过DEBUG的命令对指定文件进行修改,显示和执行。如果没有文件名,则是以当前内存的内容进行工作。 2.DEBUG的主要命令 1)汇编命令A 格式:– A [起始地址] 功能:该命令从指定地址开始允许输入汇编语句,把它们汇编成机器代码相继存放在从指定地址开始的存储器中。 2)反汇编命令U (1)格式1:– U [起始地址]
功能:该命令从指定地址开始,反汇编32个字节,若地址省略,则从上一个U命令的最后一条指令的下一个单元开始显示32个字节。 (2)格式2:– U [起始地址终止地址] 格式3:– U [起始地址L 字节数] 功能:该命令对指定范围的内存单元进行反汇编。例如: 3)运行命令G 格式:– G [= 起始地址1][断定点地址2[断点地址3……]] 功能:从指定地址开始执行程序。在设定的断点处程序暂停,并显示全部寄存器内容和下一条要执行的指令。 一般设置断点前最好用U命令查看一下指令开始的地址。断点数最多为10个。 如:– G=100 108 4)跟踪命令(单步执行)T 格式1:– T [=起始地址] 格式2:– T [=起始地址指令条数] 功能:从指定地址开始执行程序,每次执行一条指令,然后显示各寄存器的内容和状态寄存器的内容,及以助记符形式表示的下一条指令。 如:– T=100 5)显示内存单元内容的命令D 格式1:– D [起始地址] 格式2:– D [起始地址终止地址] 格式3:– D [起始地址L 字节数] 功能:显示指定内存单元的内容。 6)修改内存单元内容的命令E (1)用给定的内容代替指定范围的单元内容 格式:– E 地址内容表 例如:– E 2000:0100 F3 "XYZ" 8D 其中F3、"X"、"Y"、"Z"和8D各占一个字节,用这五个字节代替原内存单元2000:0100到0104的内容,"X"、"Y"、"Z"将分别存入其ASCII码值。
海湾联网调试手册讲解学习
目录 一、联网设计手册的补充说明 (2) 二、联网控制器的各种联网形式的连接说明及注意事项 (2) 三、联网控制器菜单中的设置说明及注意事项 (2) 四、举例说明控制器联网过程中出现不能联网问题的解决方法 (3) 五、公司各种联网设备的使用说明 (5) 六、如何利用串口监控软件监控联网数据,以及数据的含义和控制器发送及接收的说明 (5) 七、各种控制器主程序和联网程序兼容性对照表 (5) 八、联网数据传输形式 (5) 九、联网数据传输物理介质的各种形式及相关参数 (6)
一、联网设计手册的补充说明 1、二级网络说明: 控制器联网中,每台控制器通过各自的1个联网卡以星形、总线型或环形网络直接连接到一块,我们称作1级网络。每级网络最多支持32台控制器联网,如果联网系统中控制器台数多于32台,我们需要扩展网络,可在1级网络中的任意一台控制器上再配接一个联网卡,由该联网卡通过星形、总线型或环形网络再扩展一级网络。该控制器作为两级网络的共同节点,可以把从1个网卡中接收到的1级网络的信息,转发到另一个网卡组建的另一级网络中。因此,通过扩展网络连接起来的每台控制器,通过设置,均可以实现显示所有联网控制器的网络信息,并可以控制网络中的所有控制器(注意:该节点控制器必须设置成网络信息显示和网络命令接收)。 每级网络中的所有控制器,均可以通过增加网卡来扩展一级网络,而且扩展的网络中的每台控制器,也均可以再扩展。因此,我们通过多级网络的方式,理论上不管多少台控制器,均可以实现联网。 多级网络中的每台控制器的网络机器号,是针对该级网络中的网卡而言的。例如一台控制器配接了2个网卡,每个网卡在各自的网络中都有一个网络机器号,这些机器号可以不相同。因此,该控制器在其中一个网卡所在的网络中为1号机,在另一个网卡所在的网络中可能为2号机或其它号码。我们对控制器网络机器号的设置,都是针对网卡的,而不是针对控制器的。控制器网卡在每级网络中的网络号,均为1~32之间。 2、控制器配接多网卡说明: ※GST5000和GST9000控制器,只要有插槽,可以任意增加网卡来扩展网络,因此,GST5000可GST9000控制器,每台控制器均可以扩展多级网络。 ※GST200控制器,从主板输出排线和联网卡或通讯卡连接。配接多个网卡时,通过在排线上增加接口,可配接不同类型的网卡。GST200控制器有CRT类型、1级网络类型、二级网络类型、INET-06卡类型这四种类型的板卡。每种类型的板卡只能配接一块。因此,通过GST200控制器扩展网络时,必须申请1级网络INET-02卡和2级网络INET-02卡,两个板卡程序不同。不能同时接两个1级网络INET-02卡或两个2级网络INET-02卡来扩展网络。 二、联网控制器的各种联网形式的连接说明及注意事项 联网应用设计说明书里边对各种联网形式的接线均有图示及详细说明; 三、联网控制器菜单中的设置说明及注意事项 1、GST5000/9000控制器: A、网络机器号定义:按照回路号设置每个网卡的网络机器号,并且设置信息显示发送
Lust变桨系统调试相关事项说明_更新
Lust变桨系统调试说明 1、操作说明: 为确保系统调试安全,必须预先进行以下措施: ①现场调试人员必须佩戴好安全帽; ②400V电源的三相线、零线和地线必须可靠连接,避免缺相或漏接; ③上电前确认主控箱和轴控箱的开关处于断开状态; ④所有连接电缆连接正确(电机后面的编码器电缆号是S1、S2和S3;冗 余编码器的电缆号是T1、T2和T3,若反接,会出现飞车故障); ⑤上电前将电机的轴键拆除或利用扎带将其捆扎牢固; ⑥上电前确认电机与底座是否可靠固定; ⑦电池箱箱盖闭合(完成检查); 2、系统紧急顺桨: ①Profibus通信故障(或者不正常); ②Pitch Master故障; ③电机侧编码器故障; ④安全链信号输入无+24V(硬输入点); ⑤未提供+24COM(硬输入点); ⑥Emergency mode位为1; 3、手动模式 手动模式用于机械调零和现场安装调整用,转动速度为2.5度/秒。 手动模式前提条件: ①手动模式信号为1(硬输入点),并观察主控箱的9A1的第8通道的灯是 否点亮; ②Profibus通信正常,或者短接17K7的13、14引脚; ③Normal Operation Mode设置为0; ④Emergency Mode位为0; ⑤转动任一个桨叶时,另外两个桨叶为91度位置(或者通过关闭轴箱的电 源模拟); ⑥轴箱电池开关处于断开状态; ⑦手动旋钮的通道选择的0、1、2和3分别对应空档、轴控箱1、轴控箱2 和轴控箱3;转动方向旋钮控制的是电机的正传和反转; 4、自动模式
自动模式必须满足以下条件: ①先闭合主控箱的400V电源; ②Profibus通信正常; ③将Fault Reset置位1,然后置0; ④闭合轴箱的电池开关和电源开关前确保通信的Emerge Mode(读)为0 和Normal Operation Mode(写)为0;硬接点的Safety Signal(为高电平)、+24V和0V有正常连接,Manual Operation为0。否则会出现飞车现象; ⑤轴控箱上电顺序:先闭合电池开关(5Q1),然后闭合电源开关(6S1)。 正常状态下电机会由于内部的电路的控制不会出现转动; ⑥自动控制是通过通信软件控制,先设置好控制桨叶的目标角度、转速(建 议为3度/秒以下)和加速度(建议0.5~2度/秒2),然后将Normal Operation Mode置1,启动自动模式;若要中途停止,只能通过以下任一方式:将Normal Operation Mode置0、将对应的91度限位开关触发和关闭轴控箱电源(6S1); 5、限位开关 91度限位开关用于控制Pitch Master(主控变频器)的输出控制,当触发了该限位开关后,7K6复位,然后电机会停止,相对而言动作比较缓慢; 96度限位开关用于控制电机和Ptich Master的ENPO信号,当触发了该限位开关后,6K2和6K3复位,然后电机立即停止,相对而言动作比较迅速。 6、Bypass Bypass信号是用于旁通2个限位开关触发了以后继续启动电机转动,有硬信号和软信号之分。 Bypass软信号是对应91度限位开关。当91度触发了以后,利用通信将对应桨叶的Bypass信号置1,然后电机才可以往96度方向转动;而需要往0度方向转动不需要将对应桨叶的Bypass信号置1(实际上该Bypass信号用途不大); Bypass硬信号是对应96度限位开关,当96度触发了以后,利用硬结点的Bypass信号置1,然后电机只可以往0度方向转动; 7、温度预处理说明 根据通信中的所有温度值,需要在控制当中进行预处理,其温度的预处理值建议如下(根据Lust技术人员的建议): ①Pitch Master停机温度值为80度;
汇编语言调试DEBUG命令详解
汇编语言调试DEBUG命令详解 1、显示命令D ① D [地址] ② D [范围] 如不指定范围,一次显示8行×16个字节。 -D ;默认段寄存器为DS,当前偏移地址 -D DS:100 / -D CS:200 -D 200:100 -D 200;200为偏移地址,默认段寄存器DS -D DS:100 110/ -D 100 L 10 2.修改命令E ① E 地址;从指定地址开始,修改(或连续修改)存储单元内容。DEBUG首先显示指定单元内容,如要修改,可输入新数据;空格键显示下一个单元内容并可修改,减号键显示上一个单元内容并可修改;如不修改,可直接按空格键或减号键;回车键结束命令。 ② E 地址数据表;从指定的地址开始用数据表给定的数据修改存储单元。 -E DS:100 F3 ‘AB’ 8D。 3.添充命令F F 范围数据表; 将数据表写入指定范围的存储单元;数据个数多,忽略多出的数据,个数少,则重复使用数据表。 -F DS:0 L5 01,02,03,04,05 -F DS:0 L5 01 02 03 04 05(空格分隔) -F DS:0 L5 FF ;5个字节重复使用FF 4.显示修改寄存器命令R R;★显示所有寄存器和标志位状态; ★显示当前CS:IP指向的指令。 显示标志时使用的符号: 标志标志=1 标志=0 OF OV NV DF DN UP IF EI DI SF NG PL ZF ZR NZ AF AC NA PF PE PO CF CY NC
5.汇编命令A A [地址];从指定的地址开始输入符号指令;如省略地址,则接着上一个A命令的最后一个单元开始;若第一次使用A命令省略地址,则从当前CS:IP 开始(通常是CS:100)。 注释:①在DEBUG下编写简单程序即使用A命令。 ②每条指令后要按回车。 ③不输入指令按回车,或按Ctrl+C结束汇编。 ④支持所有8086符号硬指令,伪指令只支持DB、DW,不支持各类符号名。 6.反汇编命令U ① U [地址];从指定地址开始反汇编32个字节的机器指令;省略地址时,则接着上一个U命令的最后一个单元开始;若第一次使用U命令省略地址,则从当前CS:IP开始(通常是CS:100)。 ② U 范围;对指定范围的单元进行反汇编。 -U -U100 -U100L10 7.运行程序命令G ① G;从CS:IP指向的指令开始执行程序,直到程序结束或遇到INT 3。 ② G=地址;从指定地址开始执行程序,直到程序结束或遇到INT 3。 ③ G 断点1[,断点2,…断点10];从CS:IP指向的指令开始执行程序,直到遇到断点。 ④G=地址断点1[,断点2,…断点10] -G ;从CS:IP指向的指令开始执行程序。 -G=100 ;从指定地址开始执行程序。 -G=100 105 110 120 8.跟踪命令(单步执行命令)T ① T;从当前IP开始执行一条指令。 ② T 数值;从当前IP开始执行多条指令。 ② T =地址; ③ T =地址数值; -T -T5 / -T=100 5 9.跟踪执行并跳过子程序命令P P [=地址] [数值];类似T命令,但跳过子程序和中断服务程序。 10.退出DEBUG命令Q Q;返回DOS环境。 -Q 11.命名命令N N 文件标示符;指定文件,以便用W命令在磁盘上生成该文件,或者用L命令从磁盘装入该文件。 -N MY_https://www.360docs.net/doc/5e10617759.html,
海湾5000操作说明
海湾JB-QB-GST5000消防主机操作步骤控制器有两种工作方式,分“调试状态”和“正常监控状态”。系统开通后,应为“正常监控状态”。否则,应请原调试人员重新设置为“正常监控状态”。 (一)开机、关机 1、开机操作: 打开为控制器供电的交流电源开关;→打开电源盘的备电开关、主电开关;→打开控制器的备电开关、工作开关。 完成如上操作后,系统自动进入:上电初始化→自检状态→显示注册信息→开机结束。 2、关机操作: 按照与开机时相反的顺序关掉各开关即可。要注意各个备电开关一定要关掉。 3、日常操作几点注意: 1)在使用中,各备电开关应设在“开”位置,以保证给蓄电池及时充电; 2)在使用中,若交流电停电,蓄电池能自动投入系统使其正常工作,若8小时内仍无交流电时,8小时后应进行关机操作,在交流电恢复供电时,再进行开机操作。 3)在使用中,每季度应人为关断交流电源1-2次,每次关断时间为2-4小时。
4)因外界因素控制器长期关机时,每季度应开机1次以上,每次开机时间不少于2小时。 (二)键盘解锁、锁键盘 1、键盘解锁 控制器开机默认为“锁键”状态,若进行命令功能键(除“自检”、“消音”、“记录检查”键外)操作,液晶屏显示一个要求输入密码的画面,此时输入正确的用户密码并按下“确认”键,才可继续操作。 2、锁键盘 在操作结束和值班人员离开时,应按下“锁键”功能键,屏幕下方显示“请确认锁键盘”时,按下“确认”键即可。此时,键盘上多数命令功能键均要求重新输入密码。 (三)监视现场设备的操作 1、信息显示 当系统中有报警、故障、动作和隔离中的任悥一种信息存在时,系统将全屏显示此信息;若系统中存在的信息多于一种时,系统将自动分屏,同时显示系统中存在的各类信息,符指向的窗口为当前窗口,用“窗口切换”键可以进行当前窗口切换,用“分屏/全屏”键可以实现当前信息窗口的分屏和全屏显示转换。 2、消音 在接收到火警、故障或动作等信息时,控制器的扬声器会发出相应的警报声加以提示,此时应按“消音”键,并派人到现场检查处理。按下“消音”键后,消音指示灯点亮,扬声器终止发出警报。
变桨系统带载测试平台要求
变桨系统带载测试平台试验大纲 1 前言 本部分规定了各种型号的电动变桨驱动系统工作性能的测试要求和测试方法。适用于各种电动 变桨驱动系统出厂性能验收和新产品性能测试。 2 测试内容 电机负载测试内容主要分成三个部分: 1)变桨系统带载功能性测试 2)变桨系统带载故障模拟测试 3)变桨系统带载连续运行测试 测试的主要部件为:变桨电机、刹车系统、伺服驱动器、蓄电池、编码器。 3 测试依据 2MW 风机根据《变桨驱动系统采购规范》SB-030.02.05-A 3.6MW 风机根据《变桨驱动系统采购规范》V-69.2-BV.MR.00.00-A-D GB/T 1311-2008《直流电机试验方法》 GB/T 1029-2005《三相同步电机试验方法》 4 变桨系统带载功能测试 4.1 变桨电机额定负载测试 需测试电机在额定负载下的变桨位置、电机转速、转矩响应特性。位置给定范围为(0°~30°), 测试变桨速度为2°/S。 测试需要得到如下响应曲线图:电机运动位置给定曲线、电机位置响应曲线、电机速度响应曲 线、电机转矩响应曲线、电机电流变化曲线、电机温升曲线。 Y520000064-2 变桨系统带载测试平台试验大纲共3 页第 2 页 FDJL-JS-027 4.2 变桨电机变化负载测试 需测试电机在变化负载下的变桨位置、电机转速、转矩响应特性。位置给定范围为(0°~30°), 变化负载范围为额定负载的±50%,测试变桨速度为2°/S。 测试需要得到如下响应曲线图:电机运动位置给定曲线、电机位置响应曲线、电机速度响应曲 线、电机转矩响应曲线、电机电流变化曲线、电机温升曲线。 4.3 变桨电机最大负载测试 需测试电机在最大负载下(3s 内)的变桨位置、电机转速、转矩响应特性。位置给定范围为(0°~ 30°),测试变桨速度为2°/S。 测试需要得到如下响应曲线图:电机运动位置给定曲线、电机位置响应曲线、电机速度响应曲
Linux内核移植开发手册
江苏中科龙梦科技有限公司 Linux内核移植开发手册 修 订 记 录 项 次 修订日期 版 本修订內容修订者审 核 1 2009‐02‐04 0.1 初版发行陶宏亮, 胡洪兵 2 2009‐11‐20 0.2 删除一些 多余文字 陶宏亮, 胡洪兵
DISCLAIMER THIS DOCUMENTATION IS PROVIDED FOR USE WITH LEMOTE PRODUCTS. NO LICENSE TO LEMOTE PROPERTY RIGHTS IS GRANTED. LEMOTE ASSUMES NO LIABILITY, PROVIDES NO WARRANTY EITHER EXPRESSED OR IMPLIED RELATING TO THE USAGE, OR INTELLECTUAL PROPERTY RIGHT INFRINGEMENT EXCEPT AS PROVIDED FOR BY LEMOTE TERMS AND CONDITIONS OF SALE. LEMOTE PRODUCTS ARE NOT DESIGNED FOR AND SHOULD NOT BE USED IN ANY MEDICAL OR LIFE SUSTAINING OR SUPPORTING EQUIPMENT. ALL INFORMATION IN THIS DOCUMENT SHOULD BE TREATED AS PRELIMINARY. LEMOTE MAY MAKE CHANGES TO THIS DOCUMENT WITHOUT NOTICE. ANYONE RELYING ON THIS DOCUMENTATION SHOULD CONTACT LEMOTE FOR THE CURRENT DOCUMENTATION AND ERRATA. JIANGSU LEMOTE TECHNOLOGY CORPORATION LIMITED MENGLAN INDUSTRIAL PARK,YUSHAN,CHANGSHU CITY,JIANGSU PROVINCE,CHINA Tel: 0512‐52308661 Fax: 0512‐52308688 Http: //https://www.360docs.net/doc/5e10617759.html,
汇编语言调试及运行
汇编语言程序设计实验 实验一 汇编语言的调试和运行 班级: 姓名: 学号: 日期:
实验一汇编语言的调试和运行 一、实验目的 1、熟悉DEBUG程序和命令,并用它运行基本指令和察看运行结果。 ○1怎样调用Debug ②如何显示和修改内存单元 ③如何显示和修改CPU的寄存器 ④各标志位的状态是如何表示的,怎样修改标志寄存器 ⑤怎样汇编与反汇编 ⑥怎样执行程序 ⑦怎样跟踪程序 ⑧怎样命名和读写文件 ⑨怎样退出Debug 2、熟悉汇编中通用传送指令。 3、理解指令不同的寻址方式,注意规定或限制使用的寄存器如:双操作数 指令中,源操作数和目的操作数的地址不能同时为存储器地址,段跨越 前缀不能使用CS,操作对象是地址还是地址中的内容,指令隐含使用 的寄存器。 二、实验内容 1、键入 DEBUG 进入 DEBUG 控制状态,显示提示符 '- '
2、用命令 F100 10F 'A' 将'A'的ASCII码填入内存。
3、用命令 D100 10F 观察内存中的十六进制码及屏幕右边的ASCII字符。 4、用命令 F110 11F 41 重复上二项实验,观察结果并比较。 5、用命令 E100 30 31 32 …… 3F将30H-3FH写入地址为100开始的内存单元中,再用D命令观察结果,看键入的十六进制数是什么字符的ASCII 码?
6、用DEBUG调试和运行下列程序,记录所用的DEBUG命令和运行结果。 MOV WORD PTR [1100],3445 MOV WORD PTR [1102],5678 MOV WORD PTR [1106],6732 MOV AX,[1100] SUB AX,[1102] ADD AX,[1106] MOV [1104],AX HLT 其中粗斜体的数字可以修改。
海湾配置管理工具的使用
火灾自动报警系统是在保护对象发生火灾的情况下自动探测、显示发出火灾警报的装置。它广泛应用于现代化工厂、物资仓库、高层建筑、计算中心等建筑物内,对保证人民的生命和财产安全起着巨大作用。 火灾自动报警要经历安装、接线、调试、验收等诸多环节,其中调试是其中最重要的一个环节之一。说起调试,每个火灾自动报警系统都有其特有的调试软件,而每个厂家的调试软件只有其相关的调试人员才会接触到,相对于普通人来说也是比较神秘的,下面国产火灾报警品牌巨头—海湾的进行揭秘。 首先打开海湾调试软件工具,屏幕会出现输入密码界面。 输入密码后进入GstCfg配置管理工具界面,界面有标题栏、工具栏、状态区域和编辑区域组成。
右击状态区域内“控制器”可以添加控制器操作,GstCfg配置管理工具可添加的控制器有GST200火灾报警控制器、GST500/5000 火灾报警控制器、GST9000火灾报警控制器、DH9000电气火灾控制器、以及KR9000可燃气体报警控制器。 控制器添加界面可以对控制器的名称,是否联网、以及新老国标等基本属性进行选择。
控制器添加完成后进入如下界面,在这了我们添加一个新国标地址号是01的GST5000型火灾报警控制器。 可以在左侧框内的GST5000CH控制器右击选择添加回路,选择回路数量进行添加。添加好的界面如下。
图中右侧显示的就是设备定义的界面,在这里可以完成对所有设备定义数据的填写。最左边的一列是设备的二次码,选中右击二次码可以对其进行批量修改。
设备类型的可以在类型的下拉表中选择,如果相邻的类型是一样的,也可以批量进行修改。 描述的位置可以批量输入设备的安装位置,手动盘的盘号、点号可以直接在设备描述后面书写,书写完成保存后即可。 设备定义完成后就可以来编写联动公式了,点击“联动公式界面”,进入联动公式编辑界面。在“条件设备”区域输入条件设备,即感烟探测器、感温探测器、手动报警按钮等设备;“联动设备”区域输入需要联动的设备及延时,点击保存“保存新建”,联动公式便会出现在下方,编辑完成后保存即可。
嵌入式Linux之Kernel(裁减移植)启动调试、打印技术 printascii(补充)、内核调试
嵌入式系统搭建过程中,对于系统平台搭建工程师在完成Bootloader 的调试之后就进入Kernel 裁减移植的阶段,其中最重要的一步是Kernel 启动的调试,在调试Kernel 过程中通常遇到最常见的问题是启动异常: Uncompressing Linux............................................................ ........................... done, booting the kernel.( 挂死在此处) 注意:这里是arch/arm/boot/compressed/head.S的解压过程,调用了decompress_kernel()(同目录下的misc.c)->include/asm-arm/arch-xxx/uncompress.h的putc()实现。这是在uboot中初始化的,用的是物理地址,因为此时内核还没有起来。 而printascii则是调用了汇编。printascii()位于arch/arm/kernel/debug.S,他需要调用虚拟地址,此虚拟地址通过machine_start提供,而相关的宏在include/asm/arch-xxx/debug-macro.S实现,这下明白了。 10-05-14添加:debug.s里面需要判断一下当前是否打开了mmu,然后指定uart的基址。在解压阶段的head.s,mmu是1:1映射,目的是加快速度。到了内核的head.s,就是真正的mmu了,此时就是虚拟地址了。 导致驱动异常(启动挂死)的原因有很多,如基于EVM 板的硬件做了修改(如更改了FLASH 空间大小、地址和型号,更改了SDRAM 、DDR SDRAM 空间大小、地址和型号,更改了晶振频率等),板卡ID号不支持等。那么如何进行调试那,其实有两种调试技术比较有效。 Kernel 启动调试技术- 使用printascii() 函数跟踪start_kernel() 有没运行,在booting the kernel 之后Kernel 最先执行的是start_kernel() 函数,确认start_kernel() 有否执行就是在其开始代码段添加printascii("start_kernel …") ,如果串口没有打印出start_kernel …,说明start_kernel() 没有运行,那么可能的原因有Bootloader 配置的启动参数错误、 Kernel 加载到(DDR) SDRAM 的地址不正确, Kernel 编译时指定的(DDR) SDRAM 运行地址不正确等。这样就需要一项一项排查错误,当错误被排查完毕,通常打印出start_kernel …是种必然,如果打印出这仪信息说明 Kernel已进入到start_kernel() 执行,如果此时有串口启动打印就比较成功了,如果仍然没有打印启动信息,就需要另外一种调试技术。 附代码修改:init/main.c <<- … extern void printascii(const char*); // Modify asmlinkage void __init start_kernel(void)
8086汇编语言上机调试步骤
8086汇编语言上机调试步骤 1、在网络课堂-微机原理与接口技术-实验指导-汇编工具下载,下载汇编工具并解压,文件夹名为“masm”。 2、用鼠标点击“masm”文件夹。进入该文件夹后将看到 MASM.EXE, LINK.EXE , DEBUG.EXE3个文件进行复制操作。 3、用鼠标点击“我的电脑”再点击D: 盘,并在 D: 盘上建立新的“ MASM”文件夹,最后将上面的3个文件全部复制到该文件夹中。(注意实验所有的文件都放在该文件夹内) 4、用文本编辑软件UltraEdit-32、WINDOWS 中的记事本或其它的文本编辑器输入汇编语言程序, 注意在最后一行的 END输入完后要按一次回车键,保存的源 文件的扩展各一定要是“.asm”如: example.asm 。(建议用记事本输入源程序,另存时,保持类型选择“所有文件”如图所示) 5、进入MS-DOS方式 ( 从开始>程序>附件>命令提示符) 或者(从程序 > 运行输入“cmd”回车,进入MS-DOS环境。
6、进入D:>MASM文件夹 7、显示MASM文件夹内所有文件“dir”命令 8、在 DOS 提示符下进行汇编、连接、动态调试等操作。 例如: 对源文件 example.asm 进行的操作
D:\MASM\MASM example.asm;汇编源程序操作 D:\MASM\LINK example.dbj;连接并生成扩展名为 .EXE 的可执行文件 D:\MASM\DEBUG example.exe;对可执行文件进行调试 9、要求掌握的调试命令(在 DEBUG 中使用的命令) a: U - 反汇编命令 用法: -U 代码段地址:起始偏移地址如:-U CS:100 b: D - 显示内存中的数据命令 用法: -D 数据段地址:存放数据的偏移地址如:-D DS:00 20 c: T - 单步执行程序命令 用法: -T 要执行的指令条数如:-T 3 d: G - 连续执行程序命令 用法: -G=代码段地址:指令的起始偏移地址指令的结束偏移地址如: -G=CS:100 106 注意: 结束地址一定要是操作码的所在地址 e: R - 查看和修改寄存器数据命令 用法: -R 回车如:-R AX f: F - 对内存单元填充数据命令 用法: -F 数据段地址:偏移首地址偏移未地址填入的数据 如: -F DS:100 120 ff g: Q - 退出”DEBUG“应用程序命令 10、应用例子 ;二进制到BCD转换(a.asm) ;将给定的一个二进制数,转换成二十进制(BCD)码 DATA SEGMENT RESULT DB 3 DUP(?) DATA ENDS CODE SEGMENT
海湾消防主机操作步骤规程
精品文档 海湾消防主机操作步骤规程控制器有两种工作方式,分“调试状态”和“正常监控状态”。系统开通后,应为“正常监控状态”。否则,应请原调试人员重新设置。 (一)开机、关机 1、开机操作打开电源盘的备电开关、主电开关完成如上操作后,系统自动进入:上电初始化—自检状态—显示注册信息—开机结束。 2 关机操作关掉各开关即可。要注意备电开关一定要关掉。 (二)现场设备的操作 1、信息显示当系统中有报警、故障、动作和隔离中的任意一种信息存在时,系统将全屏显示此信息; 2、消音 在接收到火警、故障或动作等信息时,控制器的扬声器会发出相应的警报声加以提示,显示屏上会出现报警位置,此时应按“消音”键,按下“消音”键后,消音指示灯点亮,扬声器终止发出警报,立即派人到现场检查处理。 3、复位(清除)当火警、故障或动作等处理完毕后,应按下“复位”键、“确认”键,可以实现清除当前所有火警、故障和动作显示及所有控制命令。 (三)手自动操作当现场确认发生火灾时,消防主机应操作键盘处按下“启动方式”键、屏幕出现“密码”时再按“确认”键,然后屏幕会看到;设置启动方式 手动方式允许 自动方式不允许 提示方式无 按J选择“自动方式”位置,按“确认”键,屏幕显示“自动方式允许”操作完成重要提示 当有火警信息时,按下“消音”键后应马上派人到现场确认;对于故障或动作信息,也应尽快派人到现场检查维修。 消音 在接收到火警、故障或动作等信息时,控制器的扬声器会发出相应的警报声加以提示,此时应按“消音”键,并派人到现场检查处理。按下“消音”键后,消音指示灯点亮,扬声器终止发出警报。(注: 1、管理房内操作琴台只提供提醒功能,提醒有位置报警,消音功能只能消除管理房的报警声。 2、隧道内主机消音功能可以消除隧道内报警设备声音及管理房报警声音。) 1、手动火灾报警按钮 ①指示灯:红色,正常巡检时约3s 闪亮一次,报警后指示灯常亮。 ②启动方式:人工按下按片 ③复位方式:用专用钥匙复位 精品文档
使用QEMU+GDB调试Linux内核
使用QEMU调试Linux内核 一.使用QEMU安装Ubuntu10.04 1.安装qemu ubuntu下使用sudo apt-get install 安装的qemu版本是0.12.3,该版本中存在bug,使得无法在断点处停下;因此需要在qemu官方网站https://www.360docs.net/doc/5e10617759.html,/Download上下载最新的版本qemu-0.12.5.tar.gz的源代码包自己进行编译安装: ●Sudo apt-get install zlib1g-dev libsdl-dev ●解压源代码后,进入源代码所在目录执行./confingure ●执行make ●执行sudo make install 2.创建QEMU格式的硬盘 qemu-img create –f qcow2name.img size 例如:qemu-img create –f qcow2 ubuntu10.04.img 4GB 3.在创建的硬盘上安装操作系统 qemu–hdaname.img–cdrom ~/Download/ubuntu10.04.iso –boot d 说明:使用hda指定硬盘镜像,使用CDROM选定光驱。-boot d 指从cdrom启动,-boot a是软盘,-boot c 是硬盘;使用qemu或qemu-system-x86_64(64为机子),有时安装系统会很慢,这是可以考虑使用kvm来代替。 例如:kvm–hda ubuntu10.04.img –cdrom ./ubuntu-10.04.iso -boot
d 4.从已经装好操作系统的硬盘启动 qemu–hda ubuntu10.04.img 5.在64位的主机上要使用qemu-system-x86_64命令来代替qemu 二.自己编译内核 现将Linux的编译调节过程简述为: 1. 下载自己要调试的Linux内核的源代码,这个可以从Linux内 核的官方网站上得到:https://www.360docs.net/doc/5e10617759.html, 2. 编译内核最主要的便是配置文件.config,为了能够准确的得到 结果(第一次不要求编译时间),将本机的config文件直接拷 贝到解压后的源代码中。 3.然后进行make操作,结束后将产生的bzImage文件拷到boot 目录下,重启,选择自己编译的内核,这样一般不会出问题,但时间较慢,大约编译一次需要40分钟。 3.1以前编译内核是为调试内核服务的,现在做华为的项目, 发现需要在实际的机器上运行自己编译的内核,参考网站: https://www.360docs.net/doc/5e10617759.html,/tips/compiling-linux-kernel-26.html 4.为了降低编译时间,就需要对配置文件进行裁剪,在配置文件 中有好多是本机不需要的模块,参考: https://www.360docs.net/doc/5e10617759.html,/Linux/kernel_options.html。另外调试内 核与模块无关,所以辨识为M的直接可以不选。 5.剪裁的时候采用“逐步瘦身”法,先剪裁掉某个或某几个模块, 然后在进行编译,若没错,在进行模块裁剪,这样可以最大程
汇编语言编程步骤调试方法
汇编语言的编程步骤与调试方法 一、汇编源程序的建立 1. 使用工具 (1)EDIT,记事本等文本编辑软件,编辑源程序,保存为.asm文 件; (2)ASM,MASM汇编程序,对源程序进行汇编,生成.obj文件- 目标文件,以及调试用.LST-列表文件和.CRF-交叉引用表; (3)Link连接程序,对使用的目标文件和库文件进行连接,生 成.exe文件,同时调试用.map-地址映像文件; 如果源程序无语法错误,上述三步将生成可运行的.exe文件, 如果运行结果无误,则完成对汇编程序的编程,如果运行后结果存 在错误,需要进行调试。 (4)Debug调试程序,对.exe文件进行调试,修改,直到程序正 确。 图3 目标程序生成步骤图2. 编程过程 (1)用文本编辑软件,编写扩展名为.asm的源文程序文件。 (2)用汇编程序对编好的源文件进行汇编。 命令行:masm [*.asm] ↙ 如果源文件中存在语法错误,则汇编程序将指出错误类型及位置,可根据这些信息重新编辑源文件,直至无语法错误,汇编后,将生成指定名称的目标文件.obj。 使用MASM50汇编程序进行汇编,输入命令行masm或者masm *.asm后,根据提示,输入文件名,在汇编没有错误的情况下,如屏幕所示:汇编程序可生成三个文件,*.obj,*.lst和*.crf。 *.obj-目标文件,用于连接生成可执行文件; *.lst-列表文件(可选),汇编语言汇编的机器语言与汇编语言对照表,可用于
调试; *.crf-交叉引用文件(可选),给出了用户定义的所有符号和对每个符号定义、引用的行号。 (3)目标文件的连接 命令行:link [*.obj] [*.obj] [*.lib] ↙ 连接程序,将多个目标程序及库文件,连接生成可执行的*.exe文件,同时可选择生成*.map文件。 *.map-地址映像文件,给出内存地址分配的有关信息。 下图所示屏幕,为Link连接两个目标文件,没有错误的情况下,生成*.exe 文件。 (4)执行程序 执行*.exe文件,观察程序运行结果,如果存在错误,需要进行调试。调试工具DEBUG是针对汇编语言程序设计的一种调试工具,熟练使用DEBUG有助于汇编语言程序员对于逻辑错误的调试。 二、汇编程序的调试
海湾设备调试步骤审批稿
海湾设备调试步骤 YKK standardization office【 YKK5AB- YKK08- YKK2C- YKK18】
GST5000调试步骤 一、检查线路 1、总线线路(包括探头、手报、消火栓按钮、声光、模块等等现场设备的Z1/Z2信号线):此线路无极性。首先保证总线上两线不短路,其次保证每一根总线对地足够绝缘(理论上应该大于20兆欧)。然后对每组总线测量其线间电阻:将万用表跳到测量通断的档位,及“ ”档,测得值正常情况下为“1500~1900”,而且正反值应该是几乎一样的阻值。 2、层显通讯线(即A、B线):此线路有极性。其他方面同样要保证不短路不接地线间电阻与上述总线线路特征值一样。 3、DC24V电源线:此线路在对外接线中无极性。线间电阻在测量时是一个动态的变化的值,保证不短路即可,但是万不可与层显AB线串接,如果串接的话非常容易烧坏层显。 4、广播线与电话线:此线路无极性。正常情况下电话线的线间电阻很大,而广播线由于有外部音箱并联,所以线间电阻很小有时甚至只有十几或者二十几欧姆。 二、检查主机设备 1、各个板件的连接线要查看,保证其连接完好,特别是DC-DC电源模块与主机的连接线还有打印机的连接线,有时候会因为主机运送过程当中的颠簸而松动。 2、主机母槽上所插板件:除主板外其他板件如回路板、火灾显示盘接口卡、联网版、CRT接口卡都有拨码开关。其中有个位和十位两个拨码口,一般情况下我们将回路板从“1”开始拨码(个位拨1十位拨0),以此类推将所有板件的拨码顺次拨好,这样的话我们在开机注册后才可以看到主机上的“外部设备检查”中出现“第1回路有***外部设备 *个手动盘 *个多线制”、“第2回路有***外部设备”等等。 3、打印机:打印机在主机运输中是最容易受损的部件,要查看其打印纸是否完好,是否与打印机脱离。如果打印纸脱离,则需要上纸。由于GST5000、GST500打印机皆为针式打印机,所以上纸时比较麻烦。根据我的经验将纸头撕为梯形状比较容易上纸,如果撕太尖反而打印机不好识别有纸装入;在上纸中需要打印机运转,此时可以将打印机设置为“即时打印”而后不断给主机复位而让打印机运转,也可以按打印机的自检键让打印机自行运转(打印机自检的方法为:将打印机上的两个按键连续交替按下,可以使其进行自检)。 4、保险管:一般情况下不论交流电源滤波器还是AC-DC电源盒或者是D02电源盘都很少有保险管坏的可能,我们只需留意即可。 三、设备注册