辛普森式四档行星齿轮机构的传动路线分析
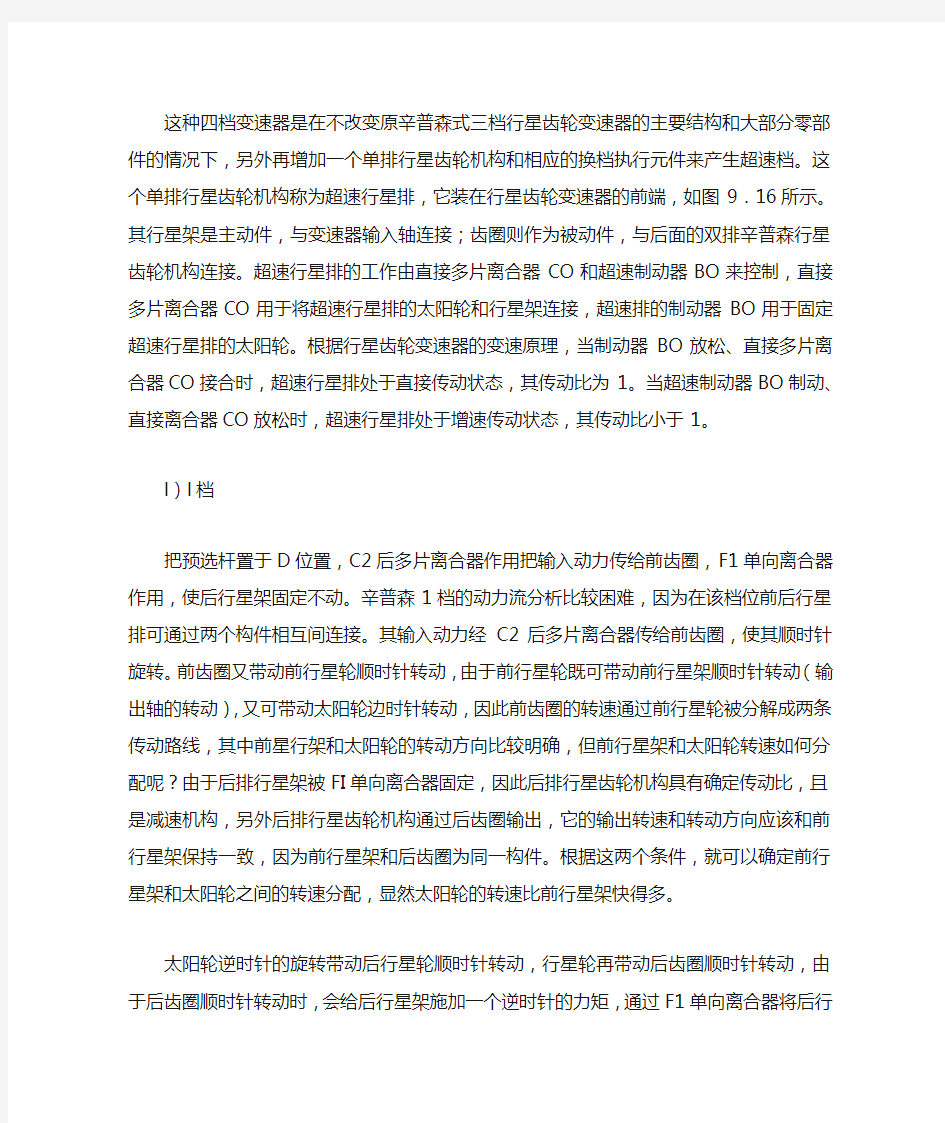
这种四档变速器是在不改变原辛普森式三档行星齿轮变速器的主要结构和大部分零部件的情况下,另外再增加一个单排行星齿轮机构和相应的换档执行元件来产生超速档。这个单排行星齿轮机构称为超速行星排,它装在行星齿轮变速器的前端,如图9.16所示。其行星架是主动件,与变速器输入轴连接;齿圈则作为被动件,与后面的双排辛普森行星齿轮机构连接。超速行星排的工作由直接多片离合器CO和超速制动器BO来控制,直接多片离合器CO用于将超速行星排的太阳轮和行星架连接,超速排的制动器BO用于固定超速行星排的太阳轮。根据行星齿轮变速器的变速原理,当制动器BO放松、直接多片离合器CO接合时,超速行星排处于直接传动状态,其传动比为1。当超速制动器BO制动、直接离合器CO放松时,超速行星排处于增速传动状态,其传动比小于1。
l)l档
把预选杆置于D位置,C2后多片离合器作用把输入动力传给前齿圈,F1单向离合器作用,使后行星架固定不动。辛普森1档的动力流分析比较困难,因为在该档位前后行星排可通过两个构件相互间连接。其输入动力经C2后多片离合器传给前齿圈,使其顺时针旋转。前齿圈又带动前行星轮顺时针转动,由于前行星轮既可带动前行星架顺时针转动(输出轴的转动),又可带动太阳轮边时针转动,因此前齿圈的转速通过前行星轮被分解成两条传动路线,其中前星行架和太阳轮的转动方向比较明确,但前行星架和太阳轮转速如何分配呢?由于后排行星架被FI单向离合器固定,因此后排行星齿轮机构具有确定传动比,且是减速机构,另外后排行星齿轮机构通过后齿圈输出,它的输出转速和转动方向应该和前行星架保持一致,因为前行星架和后齿圈为同一构件。根据这两个条件,就可以确定前行星架和太阳轮之间的转速分配,显然太阳轮的转速比前行星架快得多。
太阳轮逆时针的旋转带动后行星轮顺时针转动,行星轮再带动后齿圈顺时针转动,由于后齿圈顺时针转动时,会给后行星架施加一个逆时针的力矩,通过F1单向离合器将后行星架固定。后排行星齿轮机构的传动比是后齿圈和太阳轮齿数之比,但辛普森机构1档传动比要大得多,计算也更复杂且有确定的传动比。
辛普森机构的1档具有汽车滑行功能,当驱动轮的转速超过了发动机的转速之后,来自驱动轮的逆向动力通过后齿圈和前行星架输入机构,使后行星架顺时针旋转,脱离F1单向离合器锁止,实现了汽车滑行。当驱动轮转速低于发动机时,单向离合器重新锁止,变速器恢复驱动状态。
若要在1档实现发动机制动,则需要把预选杆置于L或1位置,此时后行星架被B2后制动带固定,驱动轮逆向传入的动力通过变速器将发动机转速提高,从而消耗动力使驱动轮转速迅速下降,实现发动机制动。
2)2档
C2后多片离合器和B1前制动带同时作用。此时涡轮输出轴经C2后多片离合器和前齿圈连接,同时太阳轮组件被B2后制动带固定。
其动力经输入轴传给前齿圈,使之作顺时针旋转,由于太阳轮被固定,因此前行星轮在前齿圈带动下,既有自转,又随行星架公转,行星轮和行星架都是顺时针转动,行星架最后带动输出轴顺时针旋转。2档传动比取决于行星架当量齿数和前齿圈齿数之比,它是一种传动比大于1的减速运动。2档的传动比仅仅和前排行星齿轮机构有关。
另外当输出轴转动时,同时会带动后齿圈顺时针转动,后太阳轮已被固定,此时后行星轮和后行星架都顺时针空转F1 单向离合器处于释放状态。
在上述的辛普森机构的2档工作状态下(预选杆置于D位),来自驱动轮的逆向传入变速器的动力,可以直接传至发动机,实现发动机制动。
3)3档
C1前多片离合器和C2后多片离合器同时作用。C1前多片离合器的接合把动力传至太阳轮,C2后多片离合器的接合把动力传至前齿圈。根据上述行星齿轮机构特征:任意两元件同速同方向旋转即为直接档,则机构锁成一整体。在3档状态,前齿圈和太阳轮均有相同旋转方向和速度。从另外角度分析,当来自C2后多片离合器的动力传至前齿圈,再由前齿圈带动太阳轮逆时针转动,而来自C1前多片离合器的动力直接传给太阳轮,使之顺时针转动,因此同一个太阳轮不可能出现两个转动方向,只能相互间锁止成一整体。当机构整体顺时针转动时,n 单向离合器和后行星架处于释放状态。3档是直接档,它的传动比是1:1。
在3档状态下,只存在发动机制动的功能,而不存在汽车滑行的作用。
当行星齿轮变速器处于1档、2档、3档或倒档时,超速行星排中的超速制动器BO放松,直接多片离合器CO接合,使超速行星排处于传动比为1的直接传动状态,而后半部分的双排行星齿轮机构各换档执行元件的工作和原辛普森式三档行星齿轮变速器在1档、2档、3档及倒档的工作完全相同。来自变矩器的发动机动力经超速行星排直接传给后半部的双排行星齿轮机构,此时行星齿轮变速器的传动比完全由后半部的双排行星齿轮机构及相应的换档执行元件来控制。当行星齿轮变速器处于超速档时,后半部的双排行星齿轮机构保持在3档的工作状态,其传动比为二;而在超速行星排中,由于超速制动器BO产生制动,直接多片离合器CO放松,使超速行星排处于增速传动状态,其传动比小于1(该传动比即为该行星齿轮变速器在超速档时的传动比)。
由于直接多片离会器CO在自动变速器处于超速档之外的任一档位(包括停车档、空档和倒档)都处于接合状态,因此当发动机刚起动而油泵尚未建立起正常的油压时,直接离合器CO就已处于半接合状态,这样容易使其摩擦片因打滑而加剧磨损。为了防止出现这种情况,在与直接离会器CO并列的位置上布置了一个直接单向超越离合器FO,使超速行星排的行星架能在逆时针方向上对太阳轮产生锁止作用。在发动机刚起动并带动自动变速器输入轴转动时,它就让超速行星排的太阳轮和行星架锁止为一个整体,防止直接离合器CO的摩擦片在半接合状态下打滑。直接单向超越离合器FO的另一个作用是改善由3档升至超速档的换档平顺性。在3档升至超速档换档过程中,为了防止超速制动器BO和直接离
合器CO同时接合,造成超速行星排各基本元件之间的运动干涉,必须在直接多片离合器CO完全释放后再让超速制动器BO接合。这样,有可能因直接多片离合器CO释放后,
超速制动器BO来不及接合,使行星齿轮变速器出现打滑现象。直接单向超越离合器FO可以在直接离合器CO已释放,而超速制动器BO尚未完全接合时,代替直接离合器CO的工作,将超速行星排太阳轮和行星架锁止在一起,防止超速行星排出现打滑现象,并在超速制动器BO接合后又能及时脱离锁止,让超速行星排顺利进入超速档工作状态。由三个行星排组成的辛普森式四档行星齿轮变速器各换档执行元件在不同档位的工作情况见表9.4。这种型式的四档行星齿轮变速器可以使原辛普森式三档行星齿轮变速器的大部分零部件都得到利用有利于减少生产投资,降低成本。
目前大部分轿车都采用这种型式的四档自动变速器,特别是日本丰田公司的四档自动变速器。有些车型的这种自动变速器将超速行星排设置在原辛普森式三档行星齿轮变速器的后端,其工作原理是相同的。
在图9.16所示的辛普森四档变速器机构中,对原辛普森三档的机构已作了改进,新增了一个制动器B1和一个单向离合器F2。对原辛普森三档的机构进行改进出于以下两点考虑:
①从2档换至3档存在运动干涉;
②要求辛普森机构2档存在两种状态,即汽车滑行和发动机制动。
原辛普森式三档行星齿轮变速器(参见图9.15)由二档换至3档时,一方面2档制动器B1要释放,另一方面执行元件的工作交替应及时准确,太快或太慢都会影响换档质量和变速器的使用寿命。例如,若二档制动器B1释放后,倒档及高档离合器C1来不及接合,会使行星齿轮变速器出现打滑现象,使发动机出现空转,并出现换档冲击;若二档制动器B1未完全释放,倒档及高档离合器C1便过早接合,则行星齿轮机构各独立元件之间会产生运动干涉。迫使换档执行元件打滑,加剧摩擦片或制动箍带的磨损。
为了防止出现上述情况,改善2-3档的换档平顺性,可在前后太阳轮组件和2档制动器B1之间串联一个单向超越离合器F2,称为2档单向超越离合器,如图9.17所示。其内圈和前后太阳轮组件连接,外圈和2档制动器B1连接,在逆时针方向对前后太阳轮组件具有锁止作用。当行星齿轮变速器处于2档时,前进离合器C2和2档制动器B1仍同时工作。汽车加速时,前后太阳轮组件的受力方向为逆时针方向,由于2档单向超越离合器F2的外圈被2档制动器B1固定,因此前后太阳轮朝逆时针方向的旋转趋势被2档制动器B1及2档单向超越离合器F1
锁止,2档得以实现。当行星齿轮变速器由2档换至3档时,即使倒档及直接档离合器C1在2档制动器B1释放之前就已接合,但由于倒档及直接档离合器C1接合之后,前后太阳轮组件的受力方向改变为顺时针方向,而在顺时针方向上2档单向离合器F2对前后太阳轮组件没有锁止作用,前后太阳轮组件仍可以向顺时针方向旋转,因此使换档得以顺利进行。
增加了2档单向离合器之后,若汽车在行星齿轮变速器处于2档时松开油门踏板减速或下坡,则在汽车惯性的作用下,驱动轮将通过变速器输出轴逆向带动行星齿轮机构的前行星架和后齿圈组件以较高的转速旋转。由于此时发动机处于怠速运转状态,和输入轴连接的前齿圈转速较低,前行星轮在前行星架的带动下朝顺时针方向作公转的同时,对前太阳轮组件产生一个顺时针方向的力矩,而太阳轮在顺时针方向旋转时,2档单向离合器F2对前后太阳轮组件没有锁止作用,因此即使2档制动器B1仍处于制动状态,前后太阳轮组件还是可以朝顺时针方向自由旋转。这样,在辛普森式行星齿轮机构的四个独立元件中有两个处于自由状态,从而使该行星齿轮机构失去传递动力的能力,驱动轮和发动机脱离连接关系,不能产生发动机制动作用。为了在需要时让2档也能产生发动机制动作用,必须在前后太阳轮组件和变速器壳体之间另外再设置一个制动器B3。制动器B3在2档是否工作,是由预选杆手柄的位置决定的,当手柄位于前进档位置(D)6寸,制动器B3不工作;当操纵手柄位于前进低档位(2或S)而行星齿轮变速器处于2档时,制动器B3工作。这样不论汽车加速或减速,前后太阳轮组件都被该制动器固定,此时的2档在汽车松开油门踏板、减速或下坡时能产生发动机制动作用。目前大多数轿车自动变速器已采用这种结构。
自动变速器由于结构类型较多,而且较为复杂,除了机械系统之外,还有十分复杂的液压系统和电控系统,因此产生故障的原因是多方面的,其中掌握每一个变速器的每一个档位的传动路线是诊断故障的主线,变速执行元件的作用或释放都是为传动路线服务的。多片离合器、制动箍带以及单向、超越式离合器都是比较容易损坏的机械部件,一旦变速执行元件失去功能,就可能影响档位的传动路线。由于每一个变速器中的复合行星齿轮机构不同,因此变速执行元件对传动路线的影响也不同。自动变速器中的液压系统主要是为变速执行元件中的多片离合器和伺服油缸服务的,使它们作用或释放。影响多片离合器或伺服油缸正常工作的最主要的因素是主回路油压。而影响主回路油压的因素很多,但关键是油泵的密封件磨损,调压阀卡滞或磨损以及液压回路的内部泄漏等。自动变速器的电子传感器主要收集换档信息和改善换档品质,以及监控报警信息,如果这些变速器的耳目发生损坏,则ECU无法执行正确的程序,无法正确地处理信息。自动变速器电控系统的执行元件主要指各种控制阀的电磁线圈,线圈的开路或短路以及电阻值发生变化是经常出现的故障,它直接影响电磁阀的工作。总之,由于影响自动变速器故障的因素很多,在诊断过程中要比较充分地加以考虑,可以采用比较法和筛选法,逐一加以判断。下面所列的故障及原因,具有典型性。
1.自动变速器油温过高
原因:油底壳中液面位置过低;长期处于大扭矩,大负载下工作浓车辆长期处于等待状态时,制动踏板没有释放(变矩器中的液体严重“剪切”);主回路油压偏低,多片离合器、制动箍带或变矩器锁止离合器(TCC)处于打滑状态;油冷却器管路或单向阀污垢堵塞。
2.换档过程有明显冲击
原因:多片离合器或制动箍带因磨损而产生比较大的间隙,“飞车”或“丢速”引起换档冲击烽擦副的表面状态已变化;储能器活塞卡滞,峰值油压无法衰减;调压阀阀体卡滞。
3.液控自动变速器的换档点不准确
低档换高档时车速提前的原因:节气门开度阀联动的钢绳索调整过松,使开度阀弹簧预紧力偏小;真空压力调制器滑阀发卡;调速阀滑阀发卡。
低档换高档时车速延迟的原因:主回路油压偏高;节气门开度阀联动的钢绳索调整过紧,使开度阀弹簧预紧力偏大;调速阀单向阀座泄漏;真空压力调制器的真空管破裂或滑间发卡;换档阀滑阀发卡。
4.电控自动变速器的换档点不准确
原因:换档规律开关选择不正确或损坏aCU控制程序有故障;节气门位置传感器和车速传感器有故障或连接导线松脱。换档电磁阀线圈故障或滑阀发卡。
5.主回路油压偏低
原因:液面高度偏低或滤清器堵塞;油泵磨损泄漏;液压回路中的密封环、单向阀座。活塞以及滑阀磨损、发卡引起泄漏;上、下阔板连接螺栓松动;节气门开度阀联动钢绳索调节过松;真空压力调制器滑阀发卡;调压阀滑阀发卡;预紧弹簧断裂或升压阀发卡;压力控制电磁阀故障。
6.换档错位或输出轴不转
原因:手动阀位置调整不准确或滑阀磨损泄漏;换档电磁阀线圈故障或换档阀发卡;ECU电源处于失电状态;主回路油压偏低,多片离合器或制动箍带打滑;单向或超越式离合器损坏;多片离合器活塞、伺服油缸活塞以及换档阀发卡,使它们无法作用或释放。
7.低速时动力明显不足(失速试验时,发动机转速偏高)
原因:变矩器中的导轮单向离合器已无法锁止,两个旋转方向均可自由转动;主回路油压偏低,多片离合器或制动箍带打滑。
8.高速时动力不足
原因:变矩器中的导轮单向离合器两个旋转方向均锁止;变矩器锁止离合器无法锁止或存在明显的滑转现象。
9.冷车时工作正常,热车时工作失常
原因:油底壳垃圾过多,工作时间长,引起进油滤清器堵塞;停车时,沉积物下落又恢复正常。
10.发动机起步颤抖或熄火
原因:变矩器锁止离合器活塞烧结,已无法分离;变矩器锁止阀发卡。11.变矩器锁止离合器作用时明显冲击
原因:锁止离合器扭振弹簧已损坏;占空比电磁间不起作用。
行星齿轮传动设计详解
1 绪论 行星齿轮传动与普通定轴齿轮传动相比较,具有质量小、体积小、传动比大、承载能力大以及传动平稳和传动效率高等优点,这些已被我国越来越多的机械工程技术人员所了解和重视。由于在各种类型的行星齿轮传动中均有效的利用了功率分流性和输入、输出的同轴性以及合理地采用了内啮合,才使得其具有了上述的许多独特的优点。行星齿轮传动不仅适用于高速、大功率而且可用于低速、大转矩的机械传动装置上。它可以用作减速、增速和变速传动,运动的合成和分解,以及其特殊的应用中;这些功用对于现代机械传动发展有着重要意义。因此,行星齿轮传动在起重运输、工程机械、冶金矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器、和航空航天等工业部门均获得了广泛的应用[1-2]。 1.1 发展概况 世界上一些工业发达国家,如日本、德国、英国、美国和俄罗斯等,对行星齿轮传动的应用、生产和研究都十分重视,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。然而,自20世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1-8]。 1.2 3K型行星齿轮传动 在图4所示的3K型行星齿轮传动中,其基本构件是三个中心轮a、b和e,故其传动类型代号为3K[10]。在3K型行星传动中,由于其转臂H不承受外力矩的作用,所以,它不是基本构件,而只是用于支承行星轮心轴所必需的结构元件,
辛普森式四档行星齿轮机构的传动路线分析-推荐下载
这种四档变速器是在不改变原辛普森式三档行星齿轮变速器的主要结构和大部 分零部件的情况下,另外再增加一个单排行星齿轮机构和相应的换档执行元件来产生超速档。这个单排行星齿轮机构称为超速行星排,它装在行星齿轮变速器的前端,如图9.16所示。其行星架是主动件,与变速器输入轴连接;齿圈则作为被动件,与后面的双排辛普森行星齿轮机构连接。超速行星排的工作由直接多片离合器CO 和超速制动器BO 来控制,直接多片离合器CO 用于将超速行星排的太阳轮和行星架连接,超速排的制动器BO 用于固定超速行星排的太阳轮。根据行星齿轮变速器的变速原理,当制动器BO 放松、直接多片离合器CO 接合时,超速行星排处于直接传动状态,其传动比为1。当超速制动器BO 制动、直接离合器CO 放松时,超速行星排处于增速传动状态,其传动比小于1。 l )l 档 把预选杆置于D 位置,C2后多片离合器作用把输入动力传给前齿圈,F1单向离合器作用,使后行星架固定不动。辛普森1档的动力流分析比较困难,因为在该档位前后行星排可通过两个构件相互间连接。其输入动力经C2后多片离合器传给前齿圈,使其顺时针旋转。前齿圈又带动前行星轮顺时针转动,由于前行星轮既可带动前行星架顺时针转动(输出轴的转动),又可带动太阳轮边时针转动,因此前齿圈的转速通过前行星轮被分解成两条传动路线,其中前星行架和太阳轮的转动方向比较明确,但前行星架和太阳轮转速如何分配呢?由于后排行星架被FI 单向离合器固定,因此后排行星齿轮机构具有确定传动比,且是减速机构,另外后排行星齿轮机构通过后齿圈输出,它的输出转速和转动方向应该和前行星架保持一致,因为前行星架和后齿圈为同一构件。根据这两个条件,就可以确定前行星架和太阳轮之间的转速分配,显然太阳轮的转速比前行星架快得多。 太阳轮逆时针的旋转带动后行星轮顺时针转动,行星轮再带动后齿圈顺时针转动,由于后齿圈顺时针转动时,会给后行星架施加一个逆时针的力矩,通过F1单向离合器将后行星架固定。后排行星齿轮机构的传动比是后齿圈和太阳轮齿数之比,但辛普森机构1档传动比要大得多,计算也更复杂且有确定的传动比。 辛普森机构的1档具有汽车滑行功能,当驱动轮的转速超过了发动机的转速之后,来自驱动轮的逆向动力通过后齿圈和前行星架输入机构,使后行星架顺时针旋转,脱离F1单向离合器锁止,实现了汽车滑行。当驱动轮转速低于发动机时,单向离合器重新锁止,变速器恢复驱动状态。 若要在1档实现发动机制动,则需要把预选杆置于L 或1位置,此时后行星架被B2后制动带固定,驱动轮逆向传入的动力通过变速器将发动机转速提高,从而消耗动力使驱动轮转速迅速下降,实现发动机制动。2)2档 、管路敷设技术通过管线不仅可以解决吊顶层配置不规范高中资料试卷问题,而且可保障各类管路习题到位。在管路敷设过程中,要加强看护关于管路高中资料试卷连接管口处理高中资料试卷弯扁度固定盒位置保护层防腐跨接地线弯曲半径标高等,要求技术交底。管线敷设技术包含线槽、管架等多项方式,为解决高中语文电气课件中管壁薄、接口不严等问题,合理利用管线敷设技术。线缆敷设原则:在分线盒处,当不同电压回路交叉时,应采用金属隔板进行隔开处理;同一线槽内,强电回路须同时切断习题电源,线缆敷设完毕,要进行检查和检测处理。、电气课件中调试对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行 高中资料试卷调整试验;通电检查所有设备高中资料试卷相互作用与相互关系,根据生产工艺高中资料试卷要求,对电气设备进行空载与带负荷下高中资料试卷调控试验;对设备进行调整使其在正常工况下与过度工作下都可以正常工作;对于继电保护进行整核对定值,审核与校对图纸,编写复杂设备与装置高中资料试卷调试方案,编写重要设备高中资料试卷试验方案以及系统启动方案;对整套启动过程中高中资料试卷电气设备进行调试工作并且进行过关运行高中资料试卷技术指导。对于调试过程中高中资料试卷技术问题,作为调试人员,需要在事前掌握图纸资料、设备制造厂家出具高中资料试卷试验报告与相关技术资料,并且了解现场设备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。 、电气设备调试高中资料试卷技术电力保护装置调试技术,电力保护高中资料试卷配置技术是指机组在进行继电保护高中资料试卷总体配置时,需要在最大限度内来确保机组高中资料试卷安全,并且尽可能地缩小故障高中资料试卷破坏范围,或者对某些异常高中资料试卷工况进行自动处理,尤其要避免错误高中资料试卷保护装置动作,并且拒绝动作,来避免不必要高中资料试卷突然停机。因此,电力高中资料试卷保护装置调试技术,要求电力保护装置做到准确灵活。对于差动保护装置高中资料试卷调试技术是指发电机一变压器组在发生内部故障时,需要进行外部电源高中资料试卷切除从而采用高中资料试卷主要保护装置。
行星齿轮结构及工作原理
行星齿轮机构和工作原理 一、 简单的行星齿轮机构的特点 行星齿轮机构的组成: 简单(单排)的行星齿轮机构是变速机构 的基础,通常自动变速器的变速机构都由两排 或三排以上行星齿轮机构组成。简单行星齿轮 机构包括一个太阳轮、若干个行星齿轮和一个 齿轮圈,其中行星齿轮由行星架的固定轴支 承,允许行星轮在支承轴上转动。行星齿轮和 相邻的太阳轮、齿圈总是处于常啮合状态,通 常都采用斜齿轮以提高工作的平稳性(如图l 所示)。 如图2表示了简单行星齿轮机构,位于行星齿轮机构中心的是太阳轮,太阳轮和行星轮常啮合,两个外齿轮啮合旋转方向相反。正如太阳位于太阳系的中心一样,太阳轮也因其位置而得名。行星轮除了可以绕行星架支承轴旋转外,在有些工况下,还会在行星架的带动下,围绕太阳轮的中心轴线旋转,这就像地球的自转和绕着太阳的公转一样,当出现这种 情况时,就称为行星齿轮机构作用的传动 方式。在整个行星齿轮机构中,如行星轮 的自转存在,而行星架则固定不动,这种 方式类似平行轴式的传动称为定轴传动。 齿圈是内齿轮,它和行星轮常啮合,是内 齿和外齿轮啮合,两者间旋转方向相同。 行星齿轮的个数取决于变速器的设计负 荷,通常有三个或四个,个数愈多承担负 荷愈大。 简单的行星齿轮机构通常称为三构件机构,三个构件分别指太阳轮、行星架和齿圈。这三构件如果要确定相互间的运动关系,一般情况下首先需要固定
其中的一个构件,然后确定谁是主动件,并确定主动件的转速和旋转方向,结 果被动件的转速、旋转方向就确定了。 二、 单排行星齿轮机构的工作原理 根据能量守恒定律,三个元件上输入和输出的功率的代数和应等于零,从而得到单排行星齿轮机构一般运动规律的特性方程。 特性方程:n1+an2-(1+a)n3=0 n1——太阳轮转速,n2——齿圈转速,n3——行星架转速,a——齿圈与太阳轮齿数比。 由特性方程可以看出,由于单排行星齿轮机构具有两个自由度,在太阳轮、环形内齿圈和行星架三个机构中,任选两个分别作为主动件和从动件,而使另一个元件固定不动,或使其运动受一定的约束(即该元件的转速为某定值),则机构只有一个自由度,整个轮系以一定的传动比传递动力。下面分别讨论三种情况。 1、齿圈固定,太阳轮为主动件且顺时针转动,而行星架则为被动件。太阳轮顺时针转动时,太阳轮轮齿必给行星轮齿A一个推力F 1 ,则行星轮应为逆时针 转动,但由于齿圈固定,所以齿圈轮齿必给行星轮齿B一个反作用力F 2 ,行星轮 在F 1和 F 2 合力作用下必绕太阳轮顺时针旋转,结果行星轮不仅存在逆时针自 转,并且在行星架的带动下,绕太阳轮中心轴线顺时针公转。在这种状态下,就出现了行星齿轮机构作用的传动方式,而且被动件行星架的旋转方向与主动件同方向。在这里,太阳轮是主动件而且是小齿轮,被动件行星架没有具体齿数的传动关系,因此定义行星架的当量齿数等于太阳轮和齿圈齿数之和。这样,太阳轮带动行星架转动仍属于小齿轮带动最大的齿轮,是一种减速运动且有最大的传动比。因为此时n2=0,故传动比 i13=n1?n3=1+a。(如图3)
行星齿轮传动原理
行星齿轮传动原理 每一部汽车上都有行星齿轮,少了它们,汽车就不能自由行走。汽车上的行星齿轮主要用在两个地方,一是驱动桥减速器、二是自动变速器。很多网友都想知道,行星齿轮有什么功能,为什么汽车少不了它。 我们熟知的齿轮绝大部分都是转动轴线固定的齿轮。例如机械式钟表,上面所有的齿轮尽管都在做转动,但是它们的转动中心(与圆心位置重合)往往通过轴承安装在机壳上,因此,它们的转动轴都是相对机壳固定的,因而也被称为"定轴齿轮"。有定必有动,对应地,有一类不那么为人熟知的称为"行星齿轮"的齿轮,它们的转动轴线是不固定的,而是安装在一个可以转动的支架(蓝色)上(图1中黑色部分是壳体,黄色表示轴承)。行星齿轮(绿色)除了能象定轴齿轮那样围绕着自己的转动轴(B-B)转动之外,它们的转动轴还随着蓝色的支架(称为行星架)绕其它齿轮的轴线(A-A)转动。绕自己轴线的转动称为"自转",绕其它齿轮轴线的转动称为"公转",就象太阳系中的行星那样,因此得名。 也如太阳系一样,成为行星齿轮公转中心的那些轴线固定的齿轮被称为"太阳轮",如图2中红色的齿轮。在一个行星齿轮上、或者在两个互相固连的行星齿轮上通常有两个啮合点,分别与两个太阳轮发生关系。如右图中,灰色的内齿轮轴线与红色的外齿轮轴线重合,也是太阳轮。 轴线固定的齿轮传动原理很简单,在一对互相啮合的齿轮中,有一个齿轮作为主动轮,动力从它那里传入,另一个齿轮作为从动轮,动力从它往外输出。也有的齿轮仅作为中转站,一边与主动轮啮合,另一边与从动轮啮合,动力从它那里通过。 在包含行星齿轮的齿轮系统中,情形就不同了。由于存在行星架,也就是说,可以有三条转动轴允许动力输入/输出,还可以用离合器或制动器之类的手段,在需要的时候限制其中一条轴的转动,剩下两条轴进行传动,这样一来,互相啮合的齿轮之间的关系就可以有多种组合: 动力从其中一个太阳轮输入,从另外一个太阳轮输出,行星架通过刹车机构刹死;动力从其中一个太阳轮输入,从行星架输出,另外一个太阳轮刹死; 动力从行星架输入,从其中一个太阳轮输出,另外一个太阳轮刹死; 两股动力分别从两个太阳轮输入,合成后从行星架输出; 两股动力分别从行星架和其中一个太阳轮输入,合成后从另外一个太阳轮输出;动力从其中一个太阳轮输入,从另外一个太阳轮和行星架分两路输出; 动力从行星架输入,分两路从两个太阳轮输出; 我们知道,汽车发动机只有一个,而车轮有四个。发动机的转速扭矩等特性与路面行驶需求大相径庭。要把发动机的功率适当地分配到驱动轮,可以利用行星齿轮的上述特性。如自动变速器,也是利用行星齿轮的这些特性,通过离合器和制动器改变各个构件的相对运动关系而获得不同的传动比
行星齿轮减速器设计【文献综述】
文献综述 机械设计制造及其自动化 行星齿轮减速器设计 一.前言 齿轮及齿轮变速箱作为机械传动中的关键零部件,几乎在所有的机械设备中都能看到它的身影。因此从某种程度上说,中国的齿轮行业是我国机械制造业的基础,齿轮行业的发展对我国机械行业有着至关重要的作用。我国齿轮行业经过“九五”结构调整与科技攻关,取得了长足的进步。 行星齿轮传动技术是齿轮传动技术的一个重要分支,采用行星齿轮传动技术开发的各类行星齿轮减速箱与行星齿轮增速箱,较之于一般的定轴式齿轮箱,在传递同样的功率与扭矩时,具有更小的体积、更轻的重量以及更高的效率,因而也更易于进行传动系统的布置和便于降低造价及运输和检修成本,因此在水泥、冶金、煤炭、矿山及石化等许多行业得以普遍运用。 行星齿轮传动的发展概况: 我国早在南北朝时代(公元429-500年),祖冲之发明了有行星齿轮的差动式指南车。因此我国行星齿轮传动的应用比欧美各国早1300多年。 1880年德国第一个行星齿轮传动装置的专利出现了。19世纪以来,随着机械工业特别是汽车和飞机工业的发展,对行星齿轮传动的发展有很大的影响。1920年首次成批制造出行星齿轮传动装置,并首先用于汽车的差速器。1938年起集中发展汽车用的行星齿轮传动装置。二次世界大战后,高速大功率船舰、透平发电机组、透平压缩机组、航空发动机及工程机械的发展,促进行星齿轮传动的发展。 高速大功率行星齿轮传动广泛的实际应用,于1951年首先在德国获得成功。1958年后,英、意、日、美、苏、瑞士等国亦获得成功,均有系列产品,并已成批生产,普遍应用。英国Allen齿轮公司生产的压缩机用行星减速器,功率25740kW;德国Renk公司生产的船用行星减速器,功率11030kW。低速重载行星减速器已由系列产品发展到生产特殊用产品,如法国Citroen生产用于水泥磨、榨糖机、矿山设备的行星减速器,重量达125t,输出转矩3900kW·m;德国Renk公司生产矿井提升机的行星减速器,功率1600kW,传动比13,输出转矩350 kW·m;日本宇都兴产公司生产了一台3200 kW,传动比720/280,输出转矩2100 kW·m的行星减速器。 我国从20世纪60年代起开始研制应用行星齿轮减速器,20世纪70年代制定了NGW型渐开线行星
辛普森式商务车自动变速器结构设计【行星齿轮变速箱】
开题报告 学生姓名专业班级 指导教师姓名职称工作单位 课题来源教师自拟课题课题性质应用设计课题名称辛普森变速器结构设计 本设计的科学依据 (科学意义和应用前景,国内外研究概况,目前技术现状、水平和发展趋势 等) 一、辛普森变速器研究的依据与意义 汽车工业作为一个国家的支柱产业,对国家的经济发展有着举足轻重的作用。从19世纪末卡尔本茨制造出的第一辆汽车到今天的智能型多功能汽车,汽车以从单纯的代步工具发展成为现代社会的象征。汽车工业发展水平、家庭平均拥有汽车数量以及公路网的建设规模等已经成为衡量一个国家工业发达程度的重要标志。在当今一些发达的国家,其汽车工业的发展更是对国家经济发展社会进步有着直接的影响。 二、辛普森变速器的国内外研究概况 目前,从市场上不同车型所配置的变速器来看,变速器主要分为以下几种: 1、手动变速器 手动变速器采用齿轮组,每档的齿轮组德齿数是固定的,所以各档的变速比是个定值。 2、自动变速器 自动变速器,利用行星齿轮机构进行变速,它能根据油门踏板程度和车速变化,自动地进行变速。而驾驶者只需操纵加速踏板控制车速即可。虽说自动变速器没有离合器,但自动变速器中有很多离合器,这些离合器能随车速变化自动分离或闭合,从而达到自动变速的目的。 3、无级变速器 无级变速器系统不像手动变速器那样用齿轮变速,而是用两个滑轮和一个刚带来变速,其传动比可以随意变化,没有换挡的突跳感觉。它能克服普通自动变速器突然换挡,油门反应慢,油耗高等缺点。无级变速器能在一定范围内实现速比的无极变换,并选定几个常用的速比作为常用的档。装配该技术的发动机可在任何转速下自动获得最合适的传动比。 三.汽车节能技术现状和发展趋势 绿色汽车、节能减排已经成为当今汽车工业发展的主旋律,未来新
行星轮系基本关系
一、简单行星轮系转矩关系 简单行星轮系(Planetary Gear Set)由太阳轮(Sun Gear)、行星架(Planet Carrier)、齿圈(Ring Gear)和行星轮(Planet Gear)构成,太阳轮S、齿圈R和行星架C有共同的回转中心,为行星轮系3个基本传动构件,如下图: 设发动机转矩由行星架C输入,FC为输入转矩在行星架上行星轮P的回转中心点的作用力,FS、FR分别为太阳轮S和齿圈R受到的外部阻力矩作用于行星轮P节圆上的反力, rS、rR分别为太阳轮S、齿圈R的节圆半径(到共同回转中心),rC为行星架上行星轮P 的回转中心点到共同回转中心的半径,rP为行星轮P的节圆半径,TS、TC、TR分别为太阳轮S、行星架C、齿圈R对行星轮P的作用力点对共同回转中心的转矩。ZS、ZR分别为太阳轮S和齿圈R的齿数,
因两齿轮齿数比等于其节圆半径比,故有:ZR∕ZS=rR∕rS,设α= ZR ∕ZS=rR∕rS,(α>1,称为行星轮系结构参数) 忽略轮系各转轴内摩擦力及各齿轮啮合摩擦力,根据作用力与反作用力定理及行星轮P平面力系平衡条件有: FC=-(FR+FS)(1) TC=-(TR+TS)(2) FR=FS (3) FC=-2FR=-2FS (4) (事实上,由于行星轮P与太阳轮S及齿圈R是通过轮齿接触传力,而与行星架C是通过转轴连接,因此当太阳轮S或齿圈R作为主动构件,行星架C作为从动构件时,(3)、(4)式的受力关系仍然成立。(1)、(2)式当然更是成立。) 即FS∕FR∕FC =1∕1∕-2 (5) 由rS、rR、rC的几何关系可知: rS∕rR∕rC =1∕α∕(1+α)÷2 (6)
行星齿轮传动比计算
行星齿轮传动比计算 在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i =ab i (E 是指固定件,即是固定的太阳轮,A 为主动件,B 为被动件)说明:H ab i =(Na-NH)/(Nb-NH),那么如果H 一开始是E ,那么e ab i =(Na-NE)/(Nb-NE)=Na/Nb=ab i NE 的转速为0........由于的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a c b a b c i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1
辛普森式行星齿轮变速器的结构与工作原理[1]
辛普森式行星齿轮变速器的结构与工作原理 [图片] 辛普森式行星齿轮变速器是由辛普森式行星齿轮机构和相应的换档执行元件组成的,目前大部分轿车自动变速器都采用这种行星齿轮变速器。辛普森行星齿轮机构是一种十分著名的双排行星齿轮机构,根据这两排在变速器中的位置,分别称之为前行星齿轮机构和后行星齿轮机构,这两组齿轮机构由共用的太阳轮相连接。前后行星轮机构有两种连接方式,一种是前行星齿轮机构的齿圈和后行星齿轮机构的行星架相连,称为前齿圈和后行星架组件,输出轴通常与前齿圈和后行星架组件连接。另一种是前行星齿轮机构的行星架和后行星齿轮机构的齿圈相连,称为前行星架和后齿圈组件,输出轴通常与前行星架和后齿圈组件连接。经过上述组合,该机构成为一种具有四个独立元件的行星齿轮机构。根据前进档的档数不同,可将辛普森式行星齿轮变速器分为三速和四速两种 在辛普森式行星齿轮机构中设置了二个离合器、二个制动器和一个单向离合器,共有五个换档执行元件,即可使之成为一个具有三个前进档和一个倒档的行星齿轮变速器,各换档执行元件的功能见下表。来自输入轴的动力由前进离合器C1输入到后齿圈或由高、倒档离合器C2传至前后太阳轮组件,不同工况下,各换档元件起作用,使动力经前齿圈和后行星架输出至输出轴。 辛普森式三速行星齿轮变速器换档执行元件功能表 辛普森式三速行星齿轮变速器的工作规律 由表可知:当行星齿轮变速器处于停车档和空档之外的任何一个档位时,五个换档执行元件中都有两个处于工作状态,即接合、制动或锁止状态,其余三个不工作,即分离、释放或自由状态。处于工作状态的两个换档执行元件中至少有一个是离合器C1或C2,以便使输入轴和行星排
行星齿轮传动的特点
行星齿轮传动的特点 行星齿轮传动与普通齿轮传动相比较,它具有许多独特的优点。它的最显著的特点是:在传递动力时它可以进行功率分流;同时,其输入轴与输出轴具有同轴性,即输出轴与输入轴均设置在同一主轴线上。所以,行星齿轮传动现已被人们用来代替普通齿轮传动,而作为各种机械传动系统中的减速器、增速器和变速装置。尤其是对于那些要求体积小、质量小、结构紧凑和传动效率高的航空发动机、起重运输、石油化工和兵器等的齿轮传动装置以及需要差速器的汽车和坦克等车辆的齿轮传动装置,行星齿轮传动已得到了越来越广泛的应用。 行星齿轮传动的主要特点如下。 (1)体积小、质量小,结构紧凑,承载能力大由于行星齿轮传动具有功率分流和各中心轮构成共轴线式的传动以及合理地应用内啮合齿轮副,因此可使其结构非常紧凑。再由于在中心轮的周围均匀地分布着数个行星轮来共同分担载荷,从而使得每个齿轮所承受的负荷较小,并允许这些齿轮采用较小的模数。此外,在结构上充分利用了内啮合承载能力大和内齿圈本身的可容体积,从而有利于缩小其外廓尺寸,使其体积小,质量小,结构非常紧凑,且承载能力大。一般,行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的1/2~1/5 (即在承受相同的载荷条件下)。 (2)传动效率高由于行星齿轮传动结构的对称性,即它具有数个匀称分布的行星轮,使得作用于中心轮和转臂轴承中的反作用力能互相平衡,从而有利于达到提高传动效率的作用。在传动类型选择恰当、结构布置合理的情况下,其效率值可达0.97~0.99。 (3)传动比较大,可以实现运动的合成与分解只要适当选择行星齿轮传动的类型及配齿方案,便可以用少数几个齿轮而获得很大的传动比。在仅作为传递运动的行星齿轮传动中,其传动比可达到几千。应该指出,行星齿轮传动在其传动比很大时,仍然可保持结构紧凑、质量小、体积小等许多优点。而且,它还可以实现运动的合成与分解以及实现各种变速的复杂的运动。 (4)运动平稳、抗冲击和振动的能力较强由于采用了数个结构相同的行星轮,均匀地分布于中心轮的周围,从而可使行星轮与转臂的性力相互平衡。同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳,抵抗冲击和振动的能力较强,工作较可靠。 总之,行星齿轮传动具有质量小、体积小、传动比大及效率高(类型选用得当)等优点。因此,行星齿轮传动现已广泛地应用于工程机械、矿山机械、冶金机械、起重运输机械、轻工机械、石油化工机械、机床、机器人、汽车、坦克、火炮、飞机、轮船、仪器和仪表等各个方面。行星传动不仅适用于高转速、大功率,而且在低速大转矩的传动装置上也已获得了应用。它几乎可适用于一切功率和转速范围,故目前行星传动技术已成为世界各国机械传动发展的重点之一。 随着行星传动技术的迅速发展,目前,高速渐开线行星齿轮传动装置所传递的功率已达到2000KW,输出转矩已达到4500KNm。据有关资料介绍,人们认为目前行星齿轮传动技术的发展方向如下。
行星齿轮传动_CVT机构的参数模型和分析
行星齿轮传动2CV T 机构的参数模型和分析 Param etr ic M odeli ng and Analysis of A planetary Gear -CVT M echan is m V ictor H .M ucino 3 J am es E .Sm ith 3 B en Co w an 33M a rek Km icik ie w icz 33 [摘要]本文研究行星齿轮传动和无级变速器(CV T )综合功能,用太阳轮和齿圈与可变节距的带轮相连接形 成一个循环功率控制元件。该机构简单,工作时不需离合器。 参数方法是用一个数学模型去完成参数灵敏度分析。优化过程的一个特徵参数是系统最有影响的参数和功能比,以它为基础去估算可变传动和功率控制元件。用三种不同的传动比和二个独立设计参数可完全确定系统的结构。这些是:行星齿轮系速比(F g )、CV T 传动速比(F c )和控制输出齿轮速比(F gc )。二个独立参数是:a ,行星轮转臂、太阳轮、内齿圈和b ,控制齿圈和输出齿轮其中之一的半径。 [ABSTRACT ] T he m echan is m con sidered here ,com b ines the functi on s of a p lanetary g ′ ear train and a con tinuou sly variab le tran s m issi on (CV T )system ,th rough a circu lating pow er con tro l un it ,w h ich resu lts by connecting the sun 2gear shaft and the ring 2gear ro tati on th rough a variab le p itch pu lley system .T he m echan is m is si m p le and does no t requ ire clu tches fo r its operati on . A param etric app roach is u sed to generate a model that can be u sed to perfo rm param etric sen sitivity analysis .In the op ti m izati on p rocess ,a param etric characterizati on is m ade based on the mo st sign ifican t param eters and functi onal rati o s of the system to evaluate the perfo rm ance of the variab le tran s m issi on and pow er con tro l un it .T h ree differen t tran s m issi on rati o s and tw o independen t design param eters fu lly define the configu rati on of the system .T hese are :the p lanetary gear train rati o (F g ),the CV T tran s m issi on rati o (F c ),and the con tro l to ou tpu t gear rati o (F gc ).T he tw o independen t param eters can be selected from the radii of tw o group s of elem en ts (one from each ),that include a )the p lanetary gear carrier ,the sun gear ,the in ternal ring gear and b )the con tro l ring gear ,and the ou tpu t gear . 关键词:行星传动 无级变速器CV T 参数模型 功率分流 功率反馈 Key w o rds :p lanetary gear train con tinuou sly variab le tran s m issi on CV T Param etric modeling pow er sp lit Pow er 2Feedback 3W est V irginia U niv .33CK Engineering 引言 行星齿轮机构和无级变速箱的综合已有很多成功的应用实例,本文仅述及由行星齿轮系和CV T 直接组合提供变速的传动装置。这两个主要部件(行星传动和CV T )的综合特性是不要求采用离合器和链传动,这种的机构的三种主要结构简称为“行星2CV T ”,一般布置为二个功率反馈和一个功率分流。 本文研究的系统如图1所示,按其特徵参数确 I n troduction P lanetary gear train m echan is m s and con tinu 2ou sly variab le tran s m issi on s have been u sed suc 2cessfu lly in m any types of app licati on s .T he m echa 2n is m p resen ted in th is paper u ses on ly a p lanetary gear train system and a CV T un it directly connect 2ed to p rovide a variab le tran s m issi on un it .T he com b ined featu res of the tw o m ain componen ts (p lanetray and CV T )do no t requ ire the u se of clu 2
行星齿轮机构传动比计算方法
行星齿轮机构传动比计算方法
Key words: epicyclic gear train; speed ratio; compute way. 随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。 行星齿轮传动或称周转轮系。根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。为理解方便,本论文所讨论限于2K-H型周转轮系。 关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。
1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动 Fig 1 Epicyclic gear train 0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、H ω为行星架H 转速、3 ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即1 3 Z Z =α。 1 行星架固定法 机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。 如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为H ωωωω、、、321。我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。那么,此时行星架的转速为()0=-+=H H H H ωωω,相当于行星
行星齿轮机构和工作原理
行星齿轮机构和工作原理
§3-3 行星齿轮机构和工作原理 Ⅰ授课思路:在初步了解行星齿轮机构的组成的基础上,通过单排行星齿轮机构一般运动规律的特性方程结合力和反作用力的作用原理使学生掌握单排行星齿轮的工作原理。拓展学生的能力,使学生概括出单排行星齿轮的基本特征。Ⅱ过程设计: 1.提问问题,复习上次课内容(约3min) ⑴导轮单向离合器有哪几种?(楔块式、滚柱式) ⑵锁止离合器的作用?(提高传动效率,使液力变矩器有液力传动变为机械 传动) 2.导入新课(约1min) 自动变速器是怎样实现自动换挡的呢?这就是我们这节课讲的主要内容3.新课内容:具体内容见“授课内容”(约73min) 4.本次课内容小结(约2min) 5.布置作业(约1min) Ⅲ讲解要点:单排行星齿轮的工作原理和单排行星齿轮的基本特征这一主线进行讲解。 Ⅳ授课内容: 一、简单的行星齿轮机构的特点 行星齿轮机构的组成: 简单(单排)的行星齿轮机构是变速机构 的基础,通常自动变速器的变速机构都由两排 或三排以上行星齿轮机构组成。简单行星齿轮
机构包括一个太阳轮、若干个行星齿轮和一个齿轮圈,其中行星齿轮由行星架的固定轴支承,允许行星轮在支承轴上转动。行星齿轮和相邻的太阳轮、齿圈总是处于常啮合状态,通常都采用斜齿轮以提高工作的平稳性(如图l所示)。 如图2表示了简单行星齿轮机构,位于行星齿轮机构中心的是太阳轮,太阳轮和行星轮常啮合,两个外齿轮啮合旋转方向相反。正如太阳位于太阳系的中心一样,太阳轮也因其位置而得名。行星轮除了可以绕行星架支承轴旋转外,在有些工况下,还会在行星架的带动下,围绕太阳轮的中心轴线旋转,这就像地球的自转和绕着太阳的公转一样,当出现这种 情况时,就称为行星齿轮机构作用的传动 方式。在整个行星齿轮机构中,如行星轮 的自转存在,而行星架则固定不动,这种 方式类似平行轴式的传动称为定轴传动。 齿圈是内齿轮,它和行星轮常啮合,是内 齿和外齿轮啮合,两者间旋转方向相同。 行星齿轮的个数取决于变速器的设计负 荷,通常有三个或四个,个数愈多承担负 荷愈大。 简单的行星齿轮机构通常称为三构件机构,三个构件分别指太阳轮、行星架和齿圈。这三构件如果要确定相互间的运动关系,一般情况下首先需要固定其中的一个构件,然后确定谁是主动件,并确定主动件的转速和旋转方向,结果被动件的转速、旋转方向就确定了。 二、单排行星齿轮机构的工作原理 根据能量守恒定律,三个元件上输入和输出的功率的代数和应等于零,从而得到单排行星齿轮机构一般运动规律的特性方程。 特性方程:n1+an2-(1+a)n3=0 n1——太阳轮转速,n2——齿圈转速,n3——行星架转速,a——齿圈与太阳轮齿数比。 由特性方程可以看出,由于单排行星齿轮机构具有两个自由度,在太阳轮、环形
行星齿轮传动装置装配技术
行星齿轮传动装置装配技术 行星齿轮变速器是一种比较先进的齿轮传动装置,与定轴轮系齿轮传动装置相比,它有传动比大、体积小、重量轻、材料消耗少、输入与输出轴同轴等优点。因之,在很多机械上,如透平压缩机、各种起重机等,目前已较多地使用行星齿轮变速器。 在行星齿轮传动装置中,一般都有两个或两个以上的行星轮参与啮合,使参与传递动力的各行星轮之间载荷分布均匀,是各类行星齿轮传动中的基本问题,故在装配时,除了一般性的工艺要求外,还应注意提高和检查各齿轮间的啮合质量,使各行星齿轮的载荷尽量分布均匀,从而保证其运转的平稳性和使用寿命。为此在制造单位往往采取一些措施以提高其啮合质量。 (1)控制各个齿轮的齿圈径向跳动和齿厚公差,有的单位为此而采用选择装配。 (2)采用定向装配,使部分误差能在装配时相互抵消。 (3)注意保证机体、内齿圈、端盖和主、从动轴的同轴度。 由于这种情况,在现场安装行星变速器时,如欲进行解体装配,则应对上列情况予以注意,对于采用定向装配的行星变速器,在解体时应在对应的啮合齿上打上标记,以免在解体装置后降低原有的啮合质量。 行星齿轮装配完成后,各部分应转动灵活,并可用涂色法检查各齿面的啮合情况,接触精度应符合技术要求。在进行空载荷试运转时声音应平稳,不应有冲击或特殊声响。 由于各类产品上的使用要求不同,因此行星齿轮变速装置的种类繁多,下面介绍几种典型结构的装配。 (一)一般行星齿轮传动装置的装配 此类行星变速器的传动原理见图6-19。按其啮合特点系属NGW型,其特点是内齿轮3与太阳轮1和公用的行星轮2相啮合。当太阳轮作高速旋转时,行星轮在太阳轮和内齿轮之间既作自转运动,又绕太阳轮作公转运动。行星转架则将行星轮的低速公转运动输出。图6-20为NGW型减速器的结构形式之一。 按照上述结构原理,当以行星转架作为输入轴时,即为行星增速器。图6-21为行星增速器结构形式之一,用于透平压缩机的增速。 图6-19 NGW型传动原理图 1—太阳轮;2—行星轮;3—内齿轮
(付鹏飞)四档辛普森行星齿轮变速器的结构
四档辛普森行星齿轮变速器的结构、组成 如图4-21、4-22所示为四档辛普森行星齿轮变速器的结构简图和元件位置图。 注意:不同厂家的四档辛普森行星齿轮变速器的元件位置稍有不同。 图4-21 四档辛普森行星齿轮变速器的结构简图 1-超速(OD)行星排行星架2-超速(OD)行星排行星轮3-超速(OD)行星排齿圈4-前行星排行星架5-前行星排行星轮6-后行星排行星架7-后行星排行星轮8-输出轴9-后行星排齿圈10-前后行星排太阳轮11-前行星排齿圈12-中间轴13-超速(OD)行星排太阳轮14-输入轴 C0-超速档(OD)离合器C1-前进档离合器C2-直接档、倒档离合器B0-超速档(OD)制动器B1-二档滑行制动器B2-二档制动器B3-低、倒档离合器F0-超速档(OD)单向离合器F1-二档(一号)单向离合器F2-低档(二号)单向离合器
图4-22 四档辛普森行星齿轮变速器的元件位置图 四档辛普森行星齿轮变速器由四档辛普森行星齿轮机构和换档执行元件两大部分组成。其中四档辛普森行星齿轮机构由三排行星齿轮机构组成,前面一排为超速行星排,中间一排为前行星排,后面一排为后行星排,之所以这样命名是由于四档辛普森行星齿轮机构是在三档辛普森行星齿轮机构的基础上发展起来的,沿用了三档辛普森行星齿轮机构的命名。输入轴与超速行星排的行星架相连,超速行星排的齿圈与中间轴相连,中间轴通过前进档离合器或直接档、倒档离合器与前、后行星排相连。前、后行星排的结构特点是,共用一个太阳轮,前行星排的行星架与后行星排的齿圈相连并与输出轴相连。 换档执行元件的功能 换档执行元件功能 C 0 超速档(OD)离合器 连接超速行星排太阳轮与超速行星排行星 架 C 1 前进档离合器连接中间轴与前行星排齿圈 C 2 直接档、倒档离合器连接中间轴与前后行星排太阳轮 B 超速档(OD)制动器制动超速行星排太阳轮 B 1 二档滑行制动器制动前后行星排太阳轮 B 2 二档制动器 制动F1外座圈,当F1也起作用时,可以防 止前后行星排太阳轮逆时针转动
ADAMS分析实例-定轴轮系和行星轮系传动模拟经典超值
ADAMS 分析实例-定轴轮系和行星轮系传动模拟 有一对外啮合渐开线直齿圆柱体齿轮传动.已知 20,4,25,5021====αmm m z z ,两个齿轮的 厚度都是50mm 。 ⒈ 启动ADAMS 双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。在欢迎对话框中选择“Create a new model ”, 在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。如图1-1所示。 图1-1 欢迎对话框 ⒉ 设置工作环境 2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。然后点击“OK ”确定。如图2-1所表示。 2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工 具箱中。 2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。 ⒊创建齿轮 3.1 在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标 ,参数选择为“New Part ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (1002 5042z m 1=?=?) 。如图3-1所示。 图 2-1 设置工作网格对话框 图3-1设置圆柱体选项
文献综述-行星齿轮传动的特点
优秀毕业论文相关资料 附录: 1.行星齿轮传动的特点: 行星齿轮传动与普通齿轮传动相比较,它具有许多独特的优点。它的最显著的特点是:在传递动力时它可以进行功率分流;同时,其翰人轴与输出轴具有同轴性,即输出轴与输人轴均设置在同丰轴线上。所以,行星齿轮传动现已被人们用来代替普通齿轮传动,而作为各种机械传动系统中的减速器、增速器和变速装置。尤其是对于那些要求休积小、质量小、结构紧凑和传动效率高的航空发动机、起重运输、石油化工和兵器等的齿轮传动装置以及需要差速器的汽车和坦克等车辆的齿轮传动装置,行星齿轮传动已得到了越来越广泛的应用。 行星齿轮传动的主要特点如下。 (1)体积小,质量小,结构紧凑,承载能力大由于行星齿轮传动具有功率分流和各中心轮构成共轴线式的传动以及合理地应用内啮合齿轮副,因此可使其结构非常紧凑。再由于在中心轮的周围均匀地分布着数个行星轮来共同分担载荷,从而使得每个齿轮所承受的负荷较小,并允许这些断轮采用较小的模数。此外,在结构上充分利用了内啮合承载能力大和内齿圈本身的可容休积,从而有利于缩小其外廓尺寸,使其体积小,质量小,结构非常紧凑,且承载能力大一般,行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的1/2 -1/5(即在承受相同的载荷条件下)。 (2)传动效率高由丁行星齿轮传动结构的对称性,即它其有数个匀称分布的行星轮,使得作用于中心轮和转臂轴承中的反作用力能互相平衡,从而有利于达到提高传动效率的作用。在传动类型选择恰当、结构布置合理的情况下,其效率值可达0.97-0.99。 (3)传动比较大,可以实现运动的合成与分解只要适当选择行星齿轮传动的类型及配齿方案,便可以用少数几个齿轮而获得很大的传动比。在仅作为传递运动的行星齿轮传动中,其传动比可达到儿千。应该指出,行星齿轮传动在其传动比很大时,仍然可保持结构紧凑、质量小、休积小等许多优点。而且,它还可以实现运动的合成与分解以及实现各种变速的复杂的运动。 (4)运动平稳、抗冲击和振动的能力较强由于采用了数个结构相同的行星轮,均匀地分布于中心轮的周围,从而可使行星轮与转臂的惯性力相互平衡。同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳, 1